

Dead-Time Inverter Voltage Drop in Low-End Sensorless FOC Motor Drives




Abstract
1. Introduction
2. System under Study
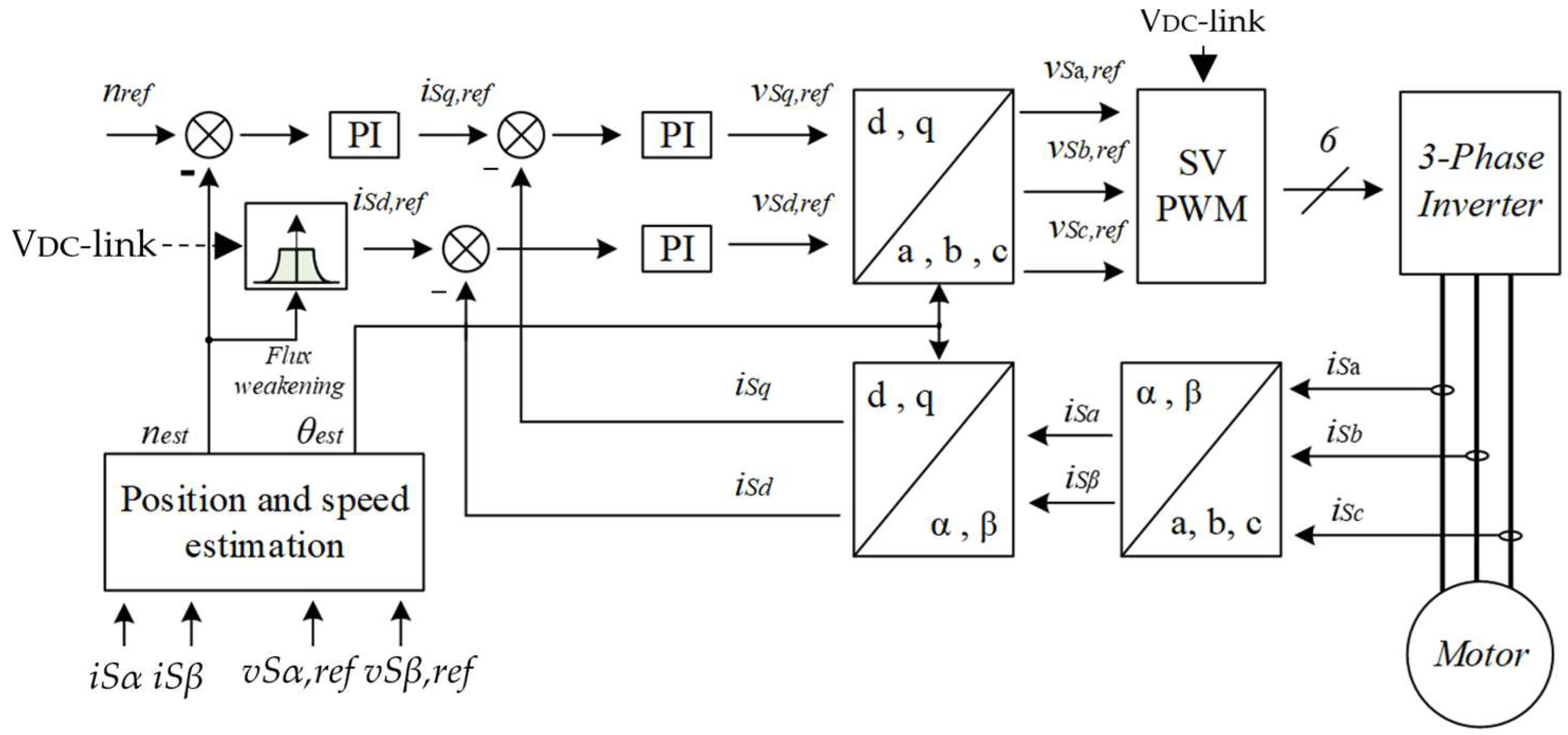
3. FOC Description
4. Inverter Voltage Drop Modeling
4.1. Basic Analysis of Inverter Voltage Drop
- IGBTs/diodes conduction and switching losses such us IGBT forward voltage and on-state resistance and diode forward voltage drop;
- PWM dead time.
4.2. Voltage Drop: Modeling in the aβ- and dq-Synchronous Reference Frames
4.3. Voltage Drop: Insertion into FOC aβ-Reference Frame
5. Simulation Results
5.1. Proposed Voltage Drop Compensation Scheme
- In the top graph, the system operates ideally with no dead time introduced;
- In the middle graph, the system is non-ideal, featuring a 2 us dead time but without any compensation method;
- In the bottom graph, the system is non-ideal and incorporates a 2 us dead time while applying our proposed compensation method.
5.2. Comparison between abc-Voltage Drop Compensation and αβ—Reference Voltage Drop Compensation
5.3. Enhanced FOC Validation over the Entire Motor Speed Range
6. Experimental Results
- The EMC filter;
- The PFC;
- The VSI;
- The MCU;
- The driving system.
6.1. Start-Up to Low-Speed Validation
6.2. Deceleration to Low-Speed Validation
6.3. High Speed Validation
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Leonhard, W. Control of Electrical Drives; Springer: Berlin/Heidelberg, Germany, 1996. [Google Scholar]
- Santisteban, J.A.; Stephan, R.M. Vector control methods for induction machines: An overview. IEEE Trans. Educ. 2001, 44, 170–175. [Google Scholar] [CrossRef]
- Ahmad, M. High Performance AC Drives: Modelling Analysis and Control; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- AlShanfari, A.K.; Wang, J. Influence of control bandwidth on stability of permanent magnet brushless motor drive for ‘more electric’ aircraft systems. In Proceedings of the 2011 International Conference on Electrical Machines and Systems, Beijing, China, 20–23 August 2011; pp. 1–7. [Google Scholar]
- Available online: https://www.infineon.com/cms/en/product/microcontroller/32-bit-industrial-microcontroller-based-on-arm-cortex-m/32-bit-xmc1000-industrial-microcontroller-arm-cortex-m0/xmc1400/ (accessed on 5 January 2024).
- Available online: https://www.infineon.com/cms/en/product/microcontroller/32-bit-psoc-arm-cortex-microcontroller/psoc-4-32-bit-arm-cortex-m0-mcu/?term=PSoC4&view=kwr&intc=searchkwr (accessed on 5 January 2024).
- Available online: https://www.st.com/content/st_com/en/search.html#q=STM32G0-t=products-page=1 (accessed on 5 January 2024).
- Available online: https://www.ti.com/microcontrollers-mcus-processors/arm-based-microcontrollers/products.html (accessed on 5 January 2024).
- Available online: https://www.nxp.com/products/processors-and-microcontrollers/arm-microcontrollers/general-purpose-mcus/lpc800-arm-cortex-m0-plus-:MC_71785 (accessed on 5 January 2024).
- Anuchin, A.; Gulyaeva, M.; Briz, F. Modeling of AC voltage source inverter with dead-time and voltage drop compensation for DPWM with switching loss minimization. In Proceedings of the 7th International Conference on Modern Power Systems 2017, Cluj-Napoca, Romania, 6–9 June 2017. [Google Scholar]
- Pham, D.C. Modeling and simulation of two level three-phase voltage source inverter with voltage drop. In Proceedings of the 2017 Seventh International Conference on Information Science and Technology (ICIST), Da Nang, Vietnam, 16–19 April 2017; pp. 317–322. [Google Scholar]
- Nakamura, Y.; Funato, H.; Ogasawara, S. Compensation of output voltage distortion analysis of pwm inverter with lc filter caused by device voltage drop. In Proceedings of the 2007 European Conference on Power Electronics and Applications, Aalborg, Denmark, 2–5 September 2007; pp. 1–9. [Google Scholar]
- Choi, J.-W.; Sul, S.-K. Inverter output voltage synthesis using novel dead time compensation. IEEE Trans. Power Electron. 1996, 11, 221–227. [Google Scholar] [CrossRef]
- Leggate, D.; Kerkman, R.J. Pulse-based dead-time compensator for PWM voltage inverters. IEEE Trans. Ind. Electron. 1997, 44, 191–197. [Google Scholar] [CrossRef]
- Zhang, Z.; Xu, L. Dead-Time Compensation of Inverters Considering Snubber and Parasitic Capacitance. IEEE Trans. Power Electr. 2014, 29, 3179–3187. [Google Scholar] [CrossRef]
- Urasaki, N.; Senjyu, T.; Uezato, K.; Funabashi, T. An adaptive deadtime compensation strategy for voltage source inverter fed motor drives. IEEE Trans. Power Electron. 2005, 20, 1150–1160. [Google Scholar] [CrossRef]
- Cichowski, A.; Nieznanski, J. Self-tuning dead-time compensation method for voltage-source inverters. IEEE Power Electron. Lett. 2005, 3, 72–75. [Google Scholar] [CrossRef]
- Li, F.; Luo, Y.; Luo, X.; Chen, P.; Chen, Y. Optimal FOPI Error Voltage Control Dead-Time Compensation for PMSM Servo System. Fractal Fract. 2023, 7, 274. [Google Scholar] [CrossRef]
- Zhao, G.; Nalakath, S.; Sun, Y.; Wiseman, J.; Emadi, A. Inverter voltage drop characterisation considering junction temperature effects. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo (ITEC), Detroit, MI, USA, 19–21 June 2019; pp. 1–6. [Google Scholar]
- Bojoi, I.R.; Armando, E.; Pellegrino, G.; Rosu, S.G. Self-commissioning of inverter nonlinear effects in AC drives. In Proceedings of the 2012 IEEE International Energy Conference and Exhibition (ENERGYCON), Florence, Italy, 9–12 September 2012; pp. 213–218. [Google Scholar]
- Shang, C.; Yang, M.; Long, J.; Xu, D.; Zhang, J.; Zhang, J. An accurate VSI nonlinearity modeling and compensation method accounting for DC-link voltage variation based on LUT. IEEE Trans. Ind. Electron. 2022, 69, 8645–8655. [Google Scholar] [CrossRef]
- Liu, X.; Li, H.; Wu, Y.; Wang, L.; Yin, S. Dynamic Dead-Time Compensation Method Based on Switching Characteristics of the MOSFET for PMSM Drive System. Electronics 2023, 12, 4855. [Google Scholar] [CrossRef]
- Ji, Y.; Yang, Y.; Zhou, J.; Ding, H.; Guo, X.; Padmanaban, S. Control Strategies of Mitigating Dead-time Effect on Power Converters: An Overview. Electronics 2019, 8, 196. [Google Scholar] [CrossRef]
- Pellegrino, G.; Bojoi, I.R.; Guglielmi, P.; Cupertino, F. Accurate inverter error compensation and related self-commissioning scheme in sensorless induction motor drives. IEEE Trans. Ind. Appl. 2010, 46, 1970–1978. [Google Scholar] [CrossRef]
- Tuovinen, T.; Hinkkanen, M. Comparison of a reduced-order observer and a full-order observer for sensorless synchronous motor drives. IEEE Trans. Ind. Appl. 2012, 48, 1959–1967. [Google Scholar] [CrossRef]
- Bose, B.K. Modern Power Electronics and AC Drives; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Miguel-Espinar, C.; Heredero-Peris, D.; Villafafila-Robles, R.; Montesinos-Miracle, D. Review of Flux-Weakening Algorithms to Extend the Speed Range in Electric Vehicle Applications With Permanent Magnet Synchronous Machines. IEEE Access 2023, 11, 22961–22981. [Google Scholar] [CrossRef]
- Maksimovic, D.; Erickson, R.W. Advances in Averaged Switch Modeling and Simulation. 1999. Available online: https://www.semanticscholar.org/paper/Advances-in-Averaged-Switch-Modeling-and-Simulation-Maksimovi%C4%87-Erickson/b956169c74489332fbdce2fa8e80db714a57d343 (accessed on 5 January 2024).
- Available online: https://www.onsemi.com/solutions/technology/motor-development-kit-mdk (accessed on 15 February 2024).
- Available online: https://www.onsemi.com/pub/Collateral/AND9390-D.PDF (accessed on 15 February 2024).





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| vam,drop(t)* | vao,drop(t)* | isa | isb | isc |
|---|---|---|---|---|
| −2/3 Vdrop | −1 Vdrop | + | - | + |
| −4/3 Vdrop | −1 Vdrop | + | - | - |
| −2/3 Vdrop | −1 Vdrop | + | + | - |
| +2/3 Vdrop | +1 Vdrop | - | + | - |
| +4/3 Vdrop | +1 Vdrop | - | + | + |
| +2/3 Vdrop | +1 Vdrop | - | - | + |
| vam,drop(t)* | vbm,drop(t)* | vcm,drop(t)* | iSa(t) | iSb(t) | iSc(t) | ||
|---|---|---|---|---|---|---|---|
| +2/3 Vdrop | +2/3 Vdrop | −4/3 Vdrop | +2/3 Vdrop | +2/√3 Vdrop | - | - | + |
| −2/3 Vdrop | +4/3 Vdrop | −2/3 Vdrop | −2/3 Vdrop | 0 | + | - | + |
| −4/3 Vdrop | +2/3 Vdrop | +2/3 Vdrop | −4/3 Vdrop | −2/√3 Vdrop | + | - | - |
| −2/3 Vdrop | −2/3 Vdrop | +4/3 Vdrop | −2/3 Vdrop | −2/√3 Vdrop | + | + | - |
| +2/3 Vdrop | −4/3 Vdrop | +2/3 Vdrop | +2/3 Vdrop | 0 | - | + | - |
| +4/3 Vdrop | −2/3 Vdrop | −2/3 Vdrop | +4/3 Vdrop | +2/√3 Vdrop | - | + | + |
| PFC and VSI Characteristics | Value | Motor Characteristics | Value |
|---|---|---|---|
| Inverter DC-link volt. (V) | 400 | Motor nominal speed (rpm) | 6000 |
| VSI Switching Freq. (kHz) | 16 | Motor maximum speed (rpm) | 7000 |
| Dead time (us) | variable | Motor winding Inductance (mH) | 16 |
| Dead-time utilization | asymm. | Motor winding resistance (Ω) | 2.5 |
| Modulation | SV-PWM | Motor Pole Pairs | 4 |
| Deactivation speed of proposed methodology (rpm) | 1000 | BEMF constant (voltage 1/rpm) | 0.028138 |
| SECO-1KW-MCTRL-GEVB | Value | Bosch Motor | Value |
|---|---|---|---|
| PFC output voltage (V) | 380 | Motor nominal power (W) | 545 |
| VSI Switch. Frequency (kHz) | 16 | Motor nominal speed (rpm) | 6000 |
| Dead time (us) | 2 (asymm.) | Motor maximum speed (rpm) | 9500 |
| System efficiency PFC + VSI | 96% | Motor winding inductance (mH) | 16 |
| Modulation | SV-PWM | Motor winding resistance (Ω) | 2.5 |
| MCU PWM resolution (bits) | 10.29 | Motor Pole Pairs | 4 |
| 1 Actual MCU ADC interval | 6 us | BEMF constant 2 (voltage /rpm) | 0.028138 |
| Proposed methodology deactivation speed (rpm) | 2000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Voglitsis, D.; Paglia, M.; Papanikolaou, N. Dead-Time Inverter Voltage Drop in Low-End Sensorless FOC Motor Drives. Energies 2024, 17, 2477. https://doi.org/10.3390/en17112477
Voglitsis D, Paglia M, Papanikolaou N. Dead-Time Inverter Voltage Drop in Low-End Sensorless FOC Motor Drives. Energies. 2024; 17(11):2477. https://doi.org/10.3390/en17112477
Chicago/Turabian StyleVoglitsis, Dionisis, Massimo Paglia, and Nick Papanikolaou. 2024. "Dead-Time Inverter Voltage Drop in Low-End Sensorless FOC Motor Drives" Energies 17, no. 11: 2477. https://doi.org/10.3390/en17112477
APA StyleVoglitsis, D., Paglia, M., & Papanikolaou, N. (2024). Dead-Time Inverter Voltage Drop in Low-End Sensorless FOC Motor Drives. Energies, 17(11), 2477. https://doi.org/10.3390/en17112477