1. Introduction
In recent years, a change from hydraulic systems (hydraulic power steering; HPS) to purely electrically operated steering systems (electric power steering; EPS) has occurred in passenger car steering systems. Initially, it was suitable only for small vehicles, due to power limitations. Now, new technologies allow the use of EPS in full-size trucks [
1].
The electric power steering system (EPS) is an important component of a car, which is responsible for the safety and reliability of the vehicle. The main advantage of electric power-assisted steering in comparison to HPS is that it is activated only when needed, the energy is fed only when the car is steered. As a result, average energy consumption decreases. Moreover, the EPS construction allows additional functionalities demanded by the market to be introduced like advanced safety features, cybersecurity, customized steering feel, automated driving, and steer-by-wire.
For such a complex device as EPS there are very challenging requirements in terms of safety, reliability, and robustness, applying both to mechanical, electrical, and software components [
2]. However, market pressure forces fast delivery of new products, with low development costs and a limited number of prototypes. To reconcile these conflicting requirements, various simulation and testing tools are available, including virtual vehicle environments or the hardware-in-the-loop (HIL) technique for real-time simulation. This paper presents various EPS control algorithms that include component faults, along with an overview of the available tools that aid development and verification before placing the device in a vehicle.
The topic of fault detection in electrical systems (also EPS) is currently widely analyzed by leading research centers. In many cases, problem analysis requires complex modeling and advanced mathematical apparatus in order to correctly identify the fault. One of the solutions is to use observer theory. Ref. [
3] proposes an adaptive observer which works on the basis of an inverse bond graph. However, this approach requires very advanced and precise methods for identifying the mechanical system. The task is more difficult in the case of non-linear systems [
4]. This increases the demand for calculations, which in the case of EPS systems is significantly reduced due to optimization during the ECU selection process. Other methods such as sliding mode observers, models with the Riccati equation, fuzzy logic, or even AI (artificial intelligence) are also used to stabilize the system in the event of damage or disturbances in various parts of it [
5,
6,
7,
8]. However, in the case of the works discussed, the main research problem concerns maintaining control when an error occurs, not its precise identification.
Cyber-resistance to unauthorized access attempts to the vehicle’s IT system is also important. There are many approaches to this issue in the literature. One of them is the analysis of strategies to improve stability, resilience, and security, in particular systems with a high degree of integration. In [
9], the authors presented the results of verification of a framework for protection against cyber attacks, in particular false data injection (FDI) attacks. Using a hardware-in-the-loop (HIL) setup, they tested an AI-based detection algorithm on solar and wind microgrids. The results confirmed that the system successfully resisted FDI attacks, maintaining the stability and performance of the microgrid.
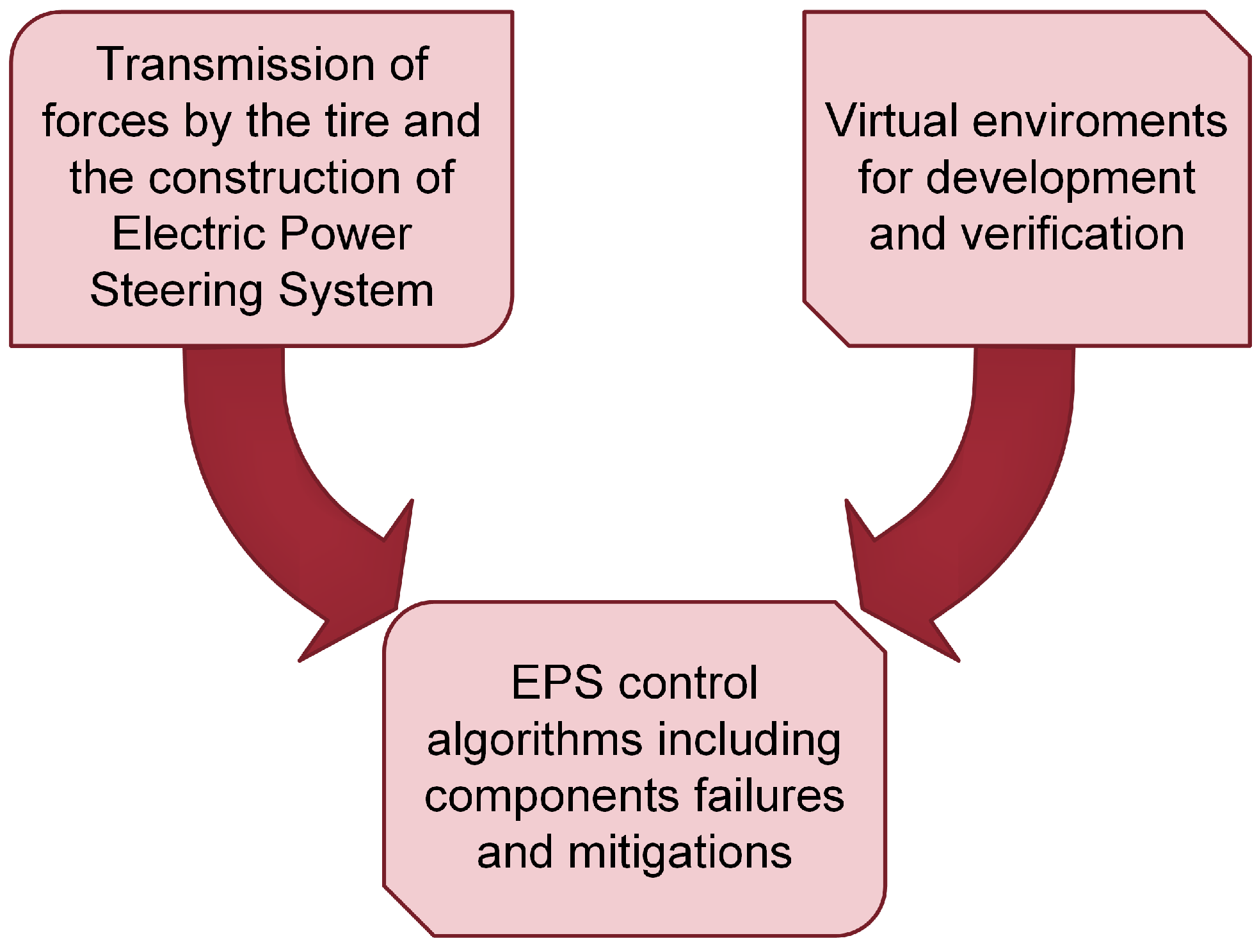
The paper is organized as follows: first, the transfer of forces to and from the EPS is presented in
Section 2, then the construction of electric power steering is detailed in
Section 3. Afterwards,
Section 4 introduces vehicle design supporting tools, including mechanics, software, and algorithms. Finally,
Section 5 demonstrates several examples of EPS subcomponent faults and how modern computing technology supports handling of them. The structure of the paper is detailed in
Figure 1.
2. Delivery of the Load to the EPS
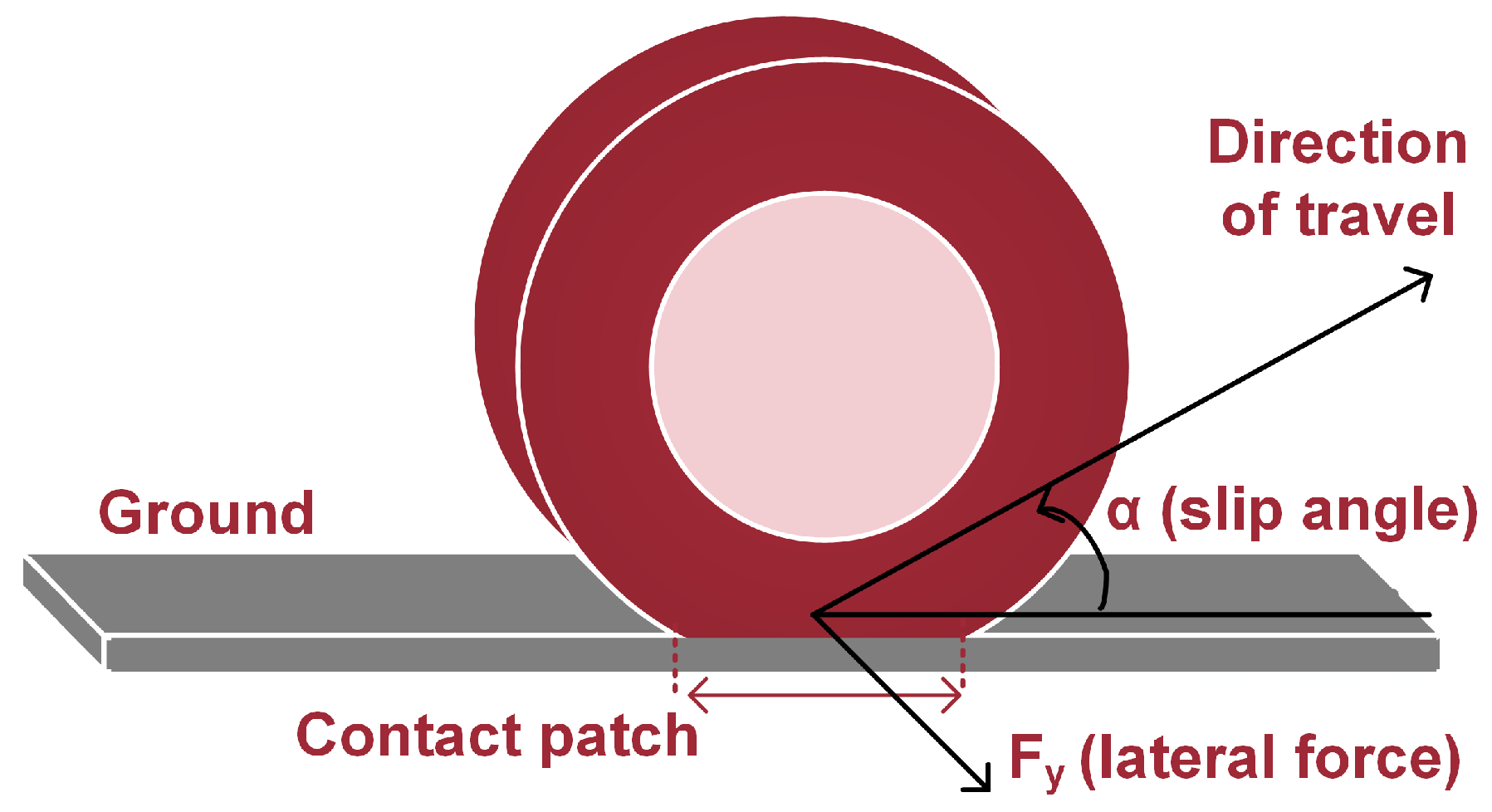
Forces between the surface of the road and the vehicle are transmitted mainly through the tire. One of the functions of a vehicle tire is to generate lateral forces to control the direction of the vehicle. These lateral forces are produced by tires as they deform with slip angles [
10]. The slip angle,
, represents the angle between the direction of travel of the tire and its longitudinal axis, as shown in
Figure 2.
Together with the rotation of the tire, the contact patch on the ground deforms according to the direction of travel. This deformation and the elasticity of the tire produce the lateral tire force [
10]. The length of the contact patch depends on the wheel load, tire filling pressure, and tire width [
11].
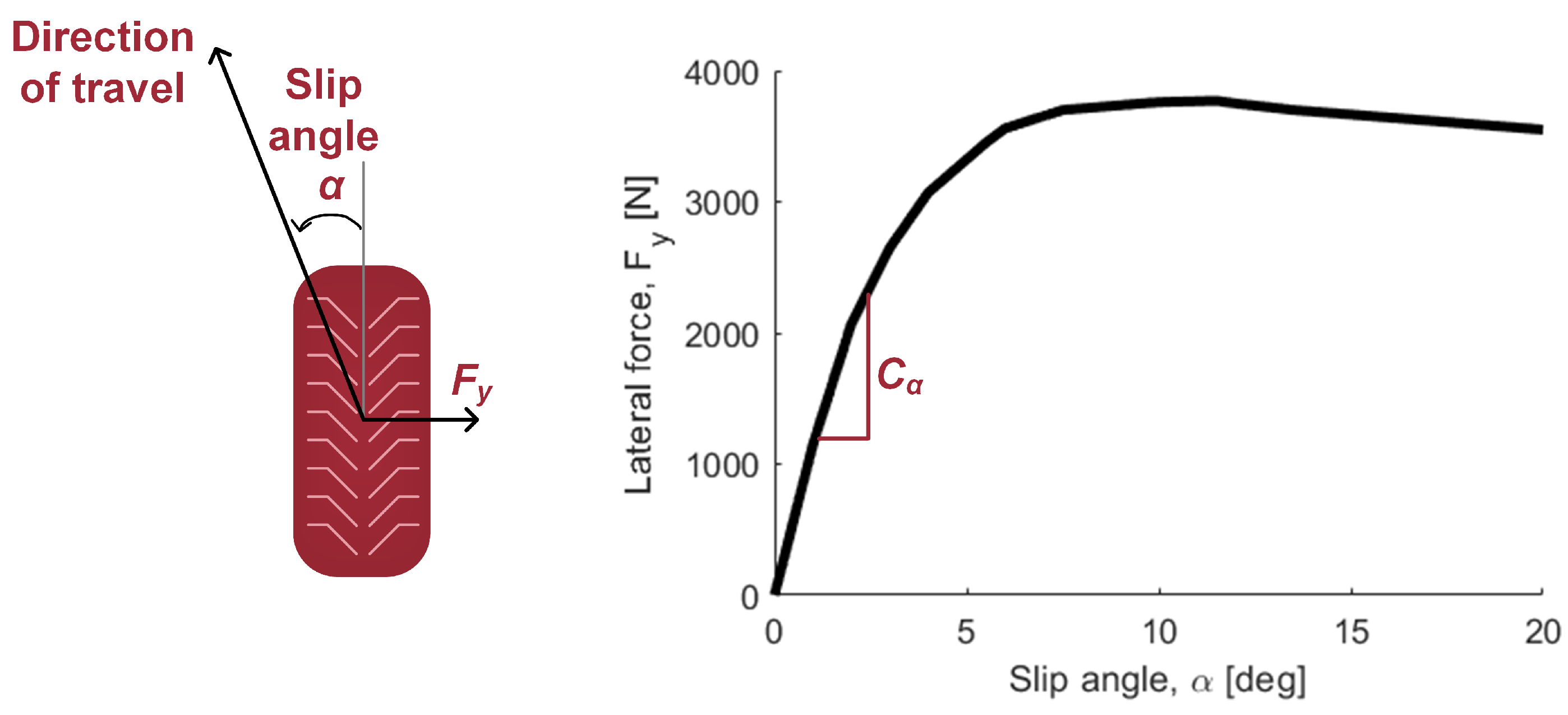
Figure 3 shows example values of the lateral force supplied by a tire as a function of the slip angle.
In the linear region of the tire curve (small slip angle, in this case below 5°, a dry surface, and acceleration up to 3–4
[
11]), the lateral force of the tire can be modeled by the following Equation (
1):
where cornering stiffness,
, is represented by the slope of the initial portion of the tire curve [
10]. The parameters of the tire significantly affects its cornering stiffness: temperature-dependent rubber shear modulus, the rubber height/thread depth, and the thread bar surface/thread pattern percentage. The temperature dependency of the rubber shear modulus and the dependency of the stiffness on the height of the thread can cause variation in the cornering stiffness of 20% and more for various operating conditions. The amount of the lateral forces that can be transferred on a solid surface depends on the properties of the frictional factors, road surface, and tread rubber. These issues are discussed in detail in [
11].
3. EPS Construction
The very basic role of the EPS is to provide additional force to the driver’s effort so that it is easier to complete the maneuver. Depending on the required assist power and the available installation space in the car, various types of EPS are available. For this reason, the following types are distinguished and described in detail in [
11]:
Column assist:
Rack and Pinion Assist
- –
Single-pinion assist;
- –
Dual-pinion assist;
- –
Rack assist.
This qualification applies to the placement of the power assist unit: for column EPS it is placed in the interior of the car while for pinion EPS it is placed right at the steering pinion and close to the vehicle’s front wheels. An example of commercially available products is presented on one of the manufacturer’s websites: [
1].
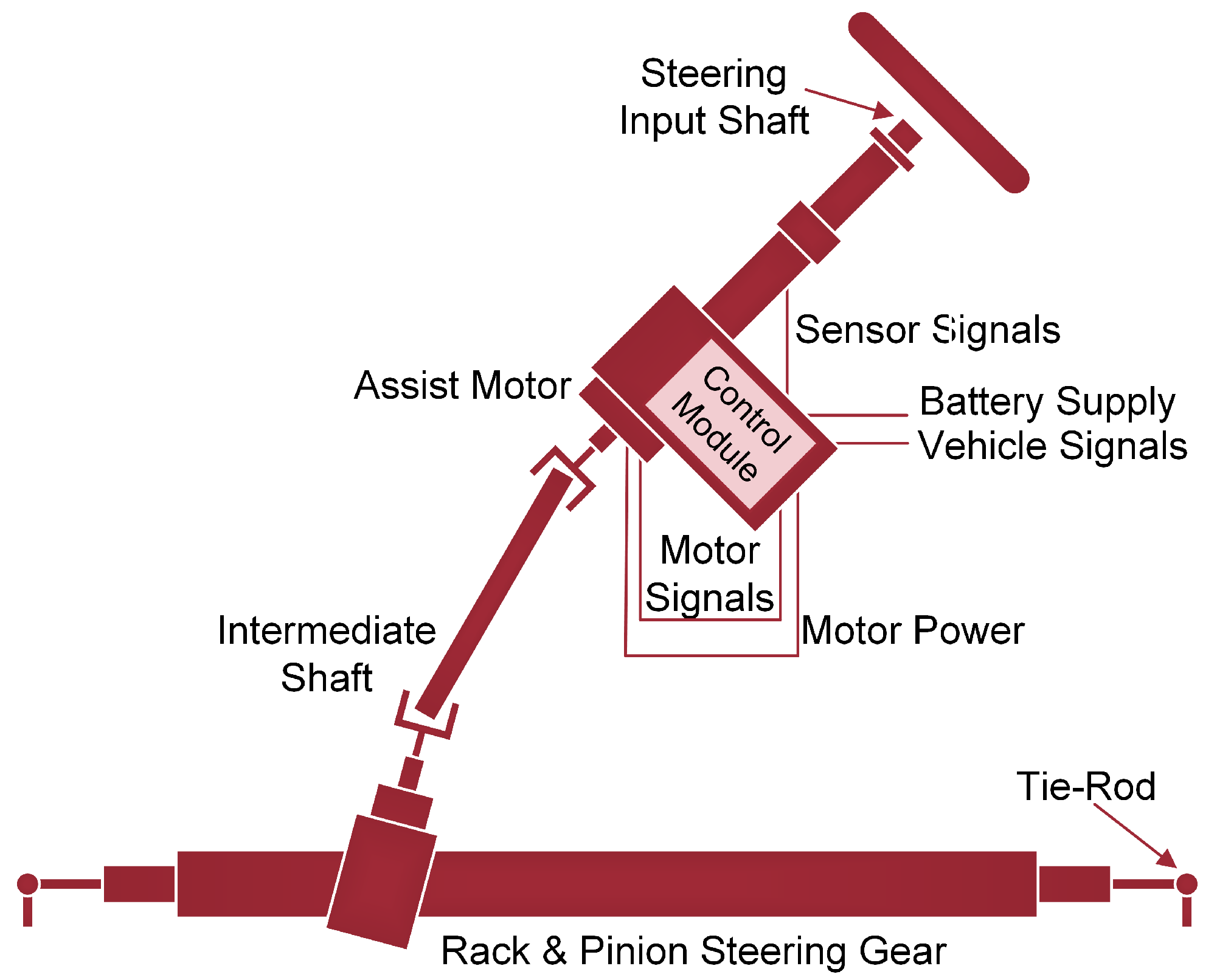
Figure 4 presents a typical CEPS (column EPS) construction.
The complete CEPS system is built with a steering column, a gear assist mechanism attached to this column, a motor, a controller, and a hand wheel torque sensor within the assist housing. The drawing also shows the remaining components: steering wheel (or hand wheel; HW), intermediate shaft, rack, pinion, and tie rods [
12].
The connection between the assist motor, wheels, and a driver is established by the power assist gear. The main function of the gear unit is to transmit the power assist torque to the rack. The forces of the power assist unit are transferred along the steering column, the intermediate shaft, and the pinion. The rotation of the assist motor and the hand wheel is converted into a translation of the rack. The types of power assist gear are the worm gear, ball screw drive, and toothed belt drive [
11].
The torque sensor is used to identify the purpose of the driver. To measure the driver’s torque, a torsion bar is placed on the input shaft of the steering system. Then, the twist (the difference between the angular position) of a torsion bar is a lag indicator of the driver’s torque. Based on the measured steering torque, the required power assist is identified by the steering functions and control [
12].
The power assist is provided by the electric motor, which converts electric energy into mechanical energy on demand. Various motor types and control methods are used depending on the application (DC motors for low-power, low-rack-force applications and AC motors for medium- and high-power and large-rack-force applications) [
13,
14]. A rotor position sensor is needed for field-oriented control of polyphase AC motors. The most popular designs for position sensors are resolvers and magnetic angle sensors [
11].
The control module gathers sensor and vehicle signals and, based on them and the implemented control algorithm, determines the motor torque. Optimal EPS control algorithms have been the subject of extensive research. The goal is to improve the driver’s steering control experience and the steering stability of a vehicle. One solution is to use assist curves to show the relationship between the assistance moment of the motor, the steering torque, and the speed of the vehicle, which is studied in [
15]. Another approach is presented in [
16]: the authors propose the linear quadratic EPS control method along with the disturbance observer to reduce manual tuning and improve the steering feel compared to conventional map control.
Fault detection methods, such as those described in the following sections of this paper, can generally be applied to all listed types of EPS, regardless of the size of the car, as long as the same assist motor and sensor types are used. All the presented EPS systems have a built-in device for sensing handwheel torque and an assist motor of various constructions, along with sensing devices for control. This demonstrates the exceptional usefulness and relevance of the incipient fault detection consideration.
The costs of introducing the additional mechanism for fault detection may vary significantly depending on the resources which are already present in the device and the type of the algorithm which needs to be implemented. In the most favorable case, measuring devices which are already on the board can be used, like motor current sensors or motor shaft position sensors, already collecting data for EPS control. Another important aspect is the available processing resources of the main microcontroller. Here, the best and the cheapest case occurs when the available computing power is sufficient to implement the algorithm, without the need for replacing computing devices to provide more power.
4. Virtual Environments for Software, Algorithms, and Mechanical Verification
Vehicle development is supported by a wide variety of available modern computing tools. They are used in both the design of mechanical components and control algorithms, along with their implementation in software. Some examples are presented in the following subsections.
4.1. Virtual Vehicle Environments for Real-Time Simulation
To speed up the vehicle development process and to decrease development cost, various virtual car environments are available, both as commercial products and as open-source. They are used to provide simulations of vehicle dynamics, sensors, and the surroundings of the car. Therefore, their possible use extends from development and virtual testing of any of the car components to the whole vehicle, including hybrid, electrical, and even autonomous cars. A virtual vehicle use case, combined with a driving simulator, is described in [
17]. This is a study on collision avoidance maneuvers that includes the impact of a real driver in order to develop an emergency steering evasion assistance controller.
The vehicle model could be developed on the basis of measurement data taken from a real car. Various approaches are available, from a model including many masses and inertias lumped together with springs and dampers [
12,
15,
18] to a data-driven approach as in [
19], where a digital twin of a hybrid vehicle is derived and validated.
Additionally, to support the development of various test scenarios for advanced functionalities, datasets are available from test cars for public use. Such a test car is equipped with an array of sensors like cameras, lidars, and radars to collect a vast amount of data. Many hours of driving in various environments, especially in cities, are then recorded and published. These datasets can be used for further testing of developed algorithms, mainly for autonomous capabilities in vehicles to reduce driving for many hours to test prototype algorithms. A comprehensive review of vehicle and environment modeling software along with datasets is provided in [
20].
4.2. Virtual Mechanical Design
Vehicle simulation is possible with various levels of fidelity, depending on the purpose of the model. Software tools supporting the virtual development of mechanical designs are available to enable car mechanics simulation as a set of rigid bodies.
An example is the Adams Car software (ver. 2021.4), a specialized environment for modeling vehicles. It allows one to create virtual prototypes of vehicle subsystems and analyze them in a similar manner to analyzing the physical prototypes. For example, a suspension assembly or a complete vehicle could be analyzed to understand its performance and behavior.
Assemblies in Adams Car are created by defining vehicle subsystems, such as steering gears and bodies. They are based on the corresponding standard templates. Then, to analyze an assembly, an analysis input is applied, specified by the user. An example is to rotate the steering wheel from lock to lock and measure the steering angles of the wheels and the difference between the angle of the left and right wheels [
21].
To further expand the virtual testing capability, there is Adams Real Time available. It allows the use of the same mechanical model for software-in-the-loop, hardware-in-the-loop, and advanced driver assistance systems co-simulation. It integrates high-fidelity multibody dynamics models with hardware and control software. High-order models allow the capture of high-frequency responses of the mechanical system. This is an important feature for accurately predicting the response of the system in forced vibration, ride analysis, and tire–road interactions.
4.3. Driver Model
The complete vehicle system consists of the vehicle, the vehicle environment, the driver, and the interactions between them. A driver model is used to obtain the best simulation compliance with real-world behavior. Possibilities of its use are for consideration of the real driver or as a course controller (as opposed to pre-setting the route the vehicle will take and the vehicle behavior during the test). One of the commercially available driver models is provided by IPG Automotive. Its inputs are desired course, speed, vehicle state, and steering wheel torque. The driver model is parameterized for the required driving/reaction style by means of parameters such as corner cutting coefficients. The driver model chooses the course within the lane boundaries or makes adjustments such as acceleration and deceleration. The model outputs are the gas and clutch pedal position, the brake pedal force, the handbrake position, the gear shift position, the angle of the steering wheel, and the torque [
22].
4.4. Building a Hardware-in-the-Loop Test Environment
The HIL simulation technique has been known for many years [
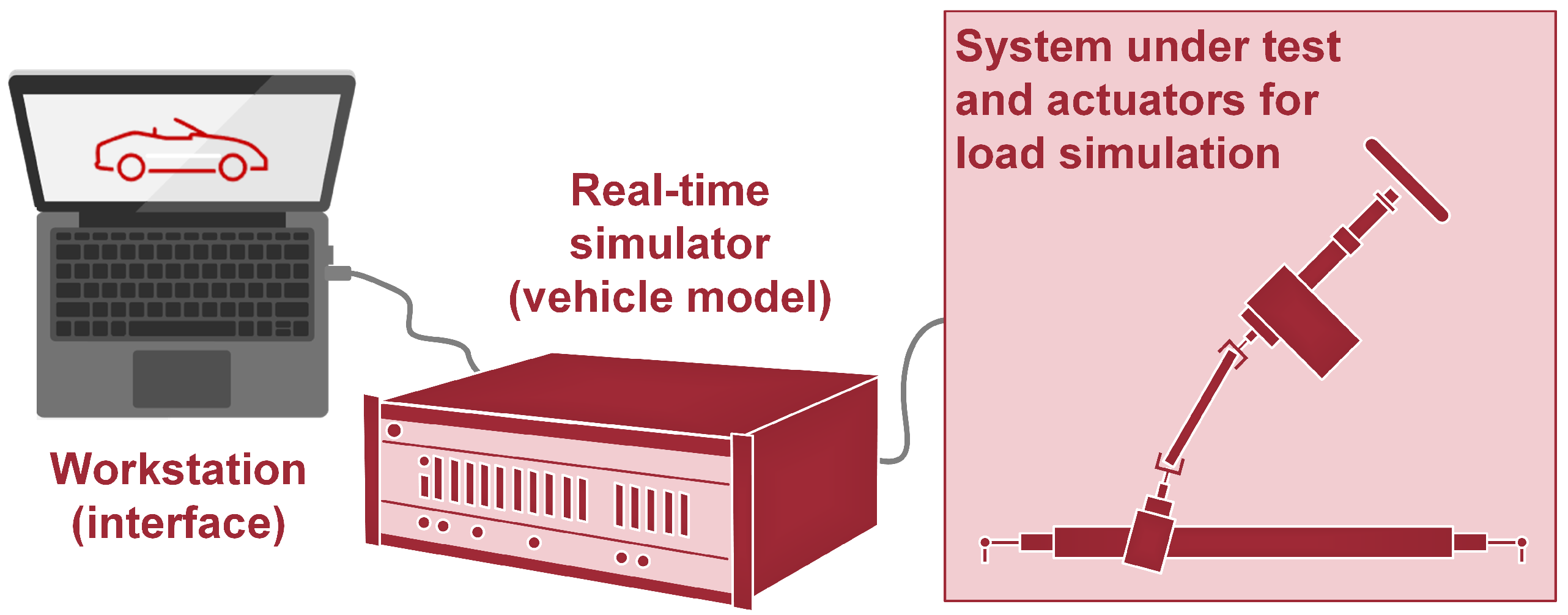
23]. Its importance for the automotive industry is increasingly growing because of the enhancement of the modern car architecture, the development of electric cars, and the addition of safety and autonomous driving features. The idea behind HIL is that some of the control-loop components are real hardware and some are simulated, as
Figure 5 shows. In this way, new algorithms or even embedded software can be tested in a controllable, simulated environment. HIL allows for increasing test scenarios and a shorter development time compared to conventional in-vehicle testing.
Possible HIL use cases include the development and testing of a powertrain configuration and its control strategy [
24], an energy management strategy for optimal torque distribution in a dual-motor powertrain of an electric vehicle [
25], or the analysis of various EPS assist settings on a mechatronic test bench in which the instrumentation is reproduced as inside the real car [
15]. HIL technology is also used to study motor performance. Examples are described in [
26], where real-time simulation coupled with the test bench is used to validate the characteristics of the propulsion PMSM motor and the control algorithm, or in [
27], where the PMSM control system based on the inverse flux map is verified on HIL.
Various test benches are available on the market, where modeling software works together with a mechatronic real-time test bench, providing the stimuli like in a real environment. These are used to validate complex vehicle control systems together with mechanical components. An example is a test bench provided by dSpace, System HIL for EPS. Actuators are incorporated into the test bench to mechanically stimulate the steering system. In this way, it is possible to test the behavior of the system almost exactly as when driving a real vehicle prototype [
28].
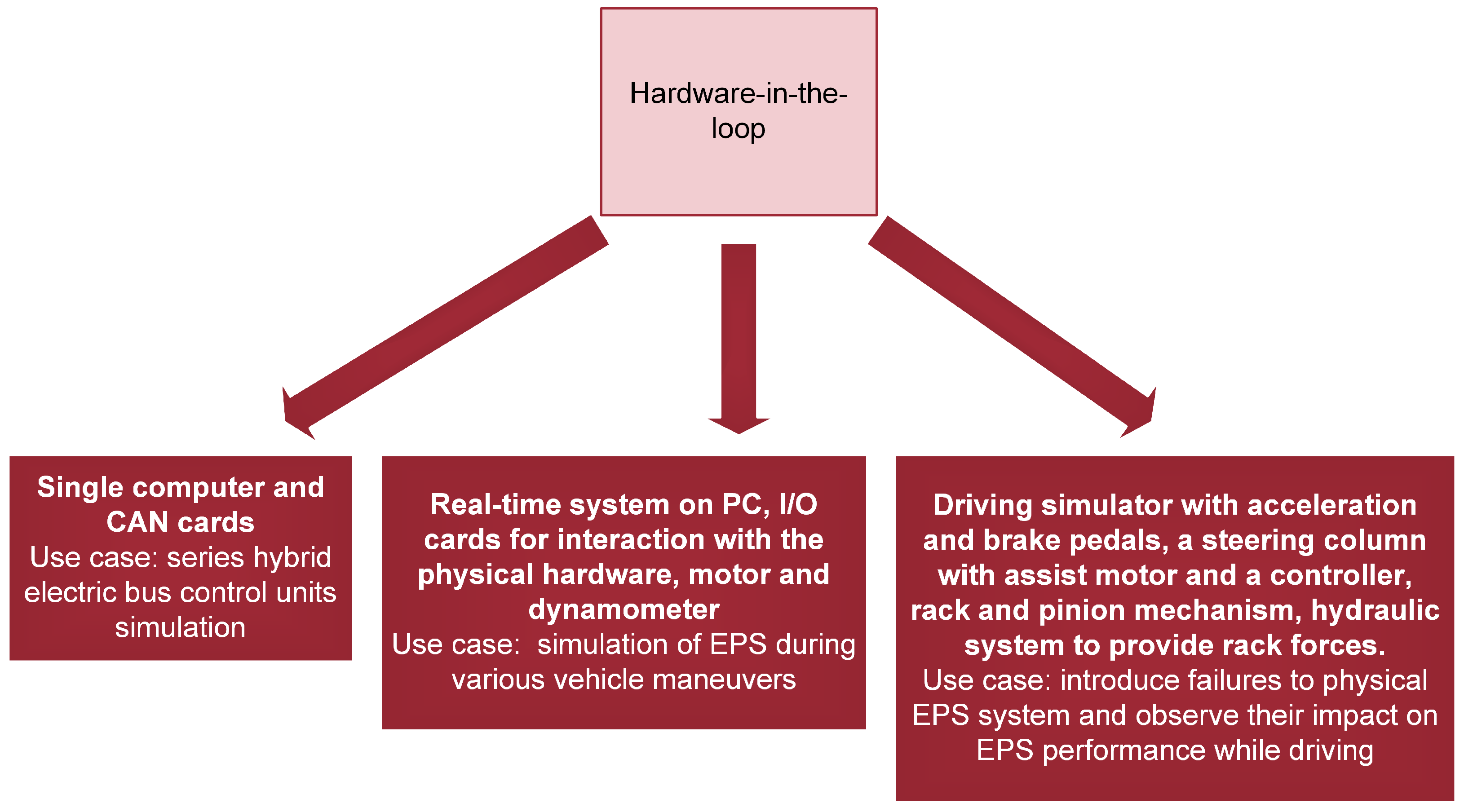
Along with commercially available HIL simulation and modeling software, custom-made HIL devices are reported, dedicated for specified problem analysis. In general, the level of complexity of the hardware and models depends on the type of problem to be solved. For some cases, a fully functional HIL platform could be implemented at a very low cost. Possible HIL implementations are presented in
Figure 6. Detailed descriptions of the setups presented are available in [
29,
30,
31].
A low-cost reconfigurable HIL system for testing software and control algorithms in real ECU is described in [
32]. It is dedicated to EPS in an electric vehicle. In the paper, the electronic control unit (ECU) is tested in realistic conditions but without engaging the electronic inverter, the motor, and their peripherals. The main focus is on the PMSM control strategy. Another use is to develop algorithms to optimize power consumption or increase the safety of the system during operation in different scenarios.
In the constructed test station, the entire hardware is replaced by a real-time model, running on a high-speed fixed-time-step FPGA processor. It is connected to the tested ECU, running on another FPGA via analog and digital I/Os, mirroring the connections required by the real hardware. To verify this approach, the controller was first used to drive models of the inverter and motor, and then, the real devices. The comparison reveals very similar performance for both setups. Therefore, test equipment, based on models and real-time simulation, is recommended for control strategy testing (either classical or fault tolerant), under the same conditions as would be tested on a real test bench.
Another example of internal development of an HIL system is [
29], where a simulation platform is presented for a central control unit (CCU) of a series hybrid electric bus. A CCU is a high-level controller that manages vehicle subcomponent control units. For CCU development and testing, a test station is proposed where the entire traffic on the vehicle CAN bus and the dynamic behavior of each subsystem are provided by real-time simulation. Models represent batteries and their management system, power generation and distribution systems, traction systems and the auxiliary motor with its inverter, and CAN messages for each of these, along with the driver and vehicle dynamic. The results of the HIL simulation showed the functionality of the designed test bench towards the verification and development process.
5. EPS Component Failures and Mitigation Algorithms
EPS is a critical safety component of the vehicle; therefore, reliability improvement methods are highly desirable. This section concentrates on EPS control aspects in case of occurrence of component malfunctions.
5.1. Handwheel Torque Sensor
The problem of torque sensor signal loss was presented in Ref. [
30]. The authors proposed estimating the torque sensor signal
based on the torsion and road torques transmitted to the motor shaft. Upon detection of sensor failure, the estimated signal
replaces the faulty torque sensor signal as an input to the motor control algorithm.
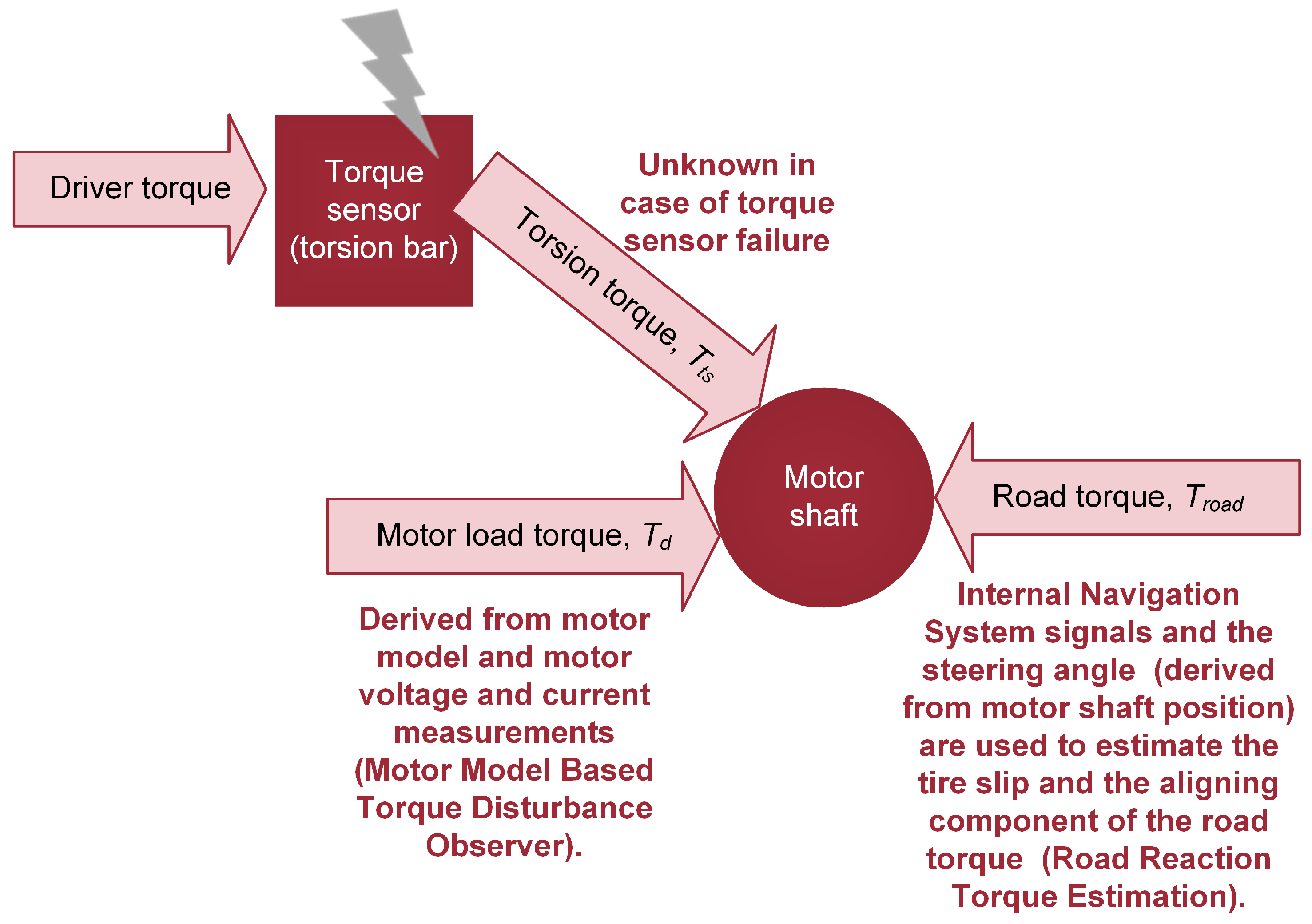
The torsional torque and the road reaction torque are reflected on the motor shaft through the gearbox and pinion shaft, as shown in the diagram in
Figure 7. Therefore, by knowing the road torque and the assist motor torque, a reliable estimate of the torsion torque can be provided.
As voltages and currents are measured during the operation of the EPS, the total motor load torque can be obtained from the knowledge of the motor model. To determine the motor torque, the state estimation technique is used. The state observer uses the nominal plant model and the terminal voltage and currents to produce an estimate of the system state.
To estimate the low-frequency road-reaction torque, signals from the INS (internal navigation system) are used: vehicle velocity and yaw rate. They are used to estimate tire slip, which in turn is proportional to the low-frequency aligning component of the road torque. The vehicle single track (bicycle) and linear tire models are the basis for calculations. Tire slip is calculated using signals from the accelerometer and gyroscope (lateral and longitudinal velocities and yaw rate), combined with the steering angle provided by the motor shaft position signal.
The two techniques presented are ultimately used to obtain an estimate of the torsion torque that is applied on the motor shaft,
. In this way, even if the torque sensor fails the estimated signal can be used as an input to the steering assist motor control instead. The torque sensor estimate takes the form of the following Formula (
2):
The low-pass filter is used to filter out the high-frequency, rough-road torque and the noise in the estimation scheme. Inertial and viscous friction torques due to the rack and pinion connection are subtracted out.
To validate the method under realistic operating conditions, the authors of the indicated article used the HIL test setup. The torsion torque, rack and pinion inertia, viscous friction, and road torque dynamics were simulated in real time by running the EPS model in software and applying the calculated torques onto the EPS motor shaft via the dynamometer. The function of a dynamometer (another motor coupled to the EPS motor shaft) is to apply the vehicle dynamic torque to the assist motor to compensate for the load that is not physically connected to the EPS motor.
An important aspect of the proposed methodology is that it works correctly only in the linear (stable handling) region of the tire lateral force
vs.
(see Equation (
1)). If any of the tire linear model criteria are not met (for example, during high-dynamic maneuvers, like double lane change), then the approximated road torque is incorrect, which finally leads to incorrect torsion torque estimation.
5.2. Electric Motor
Ref. [
31] covers the topics of EPS malfunctions of varying intensity and severity. The scope includes failures of various EPS components. Malfunctions manifest themselves as motor parameter variation, overload or overheating of stator coils, or damaged or broken bearings, resulting in increased friction. Due to early detection and accommodation, the system functionality can be maintained. Incipient problems that are slowly developing, if detected early, can be handled by maintenance to avoid serious failures.
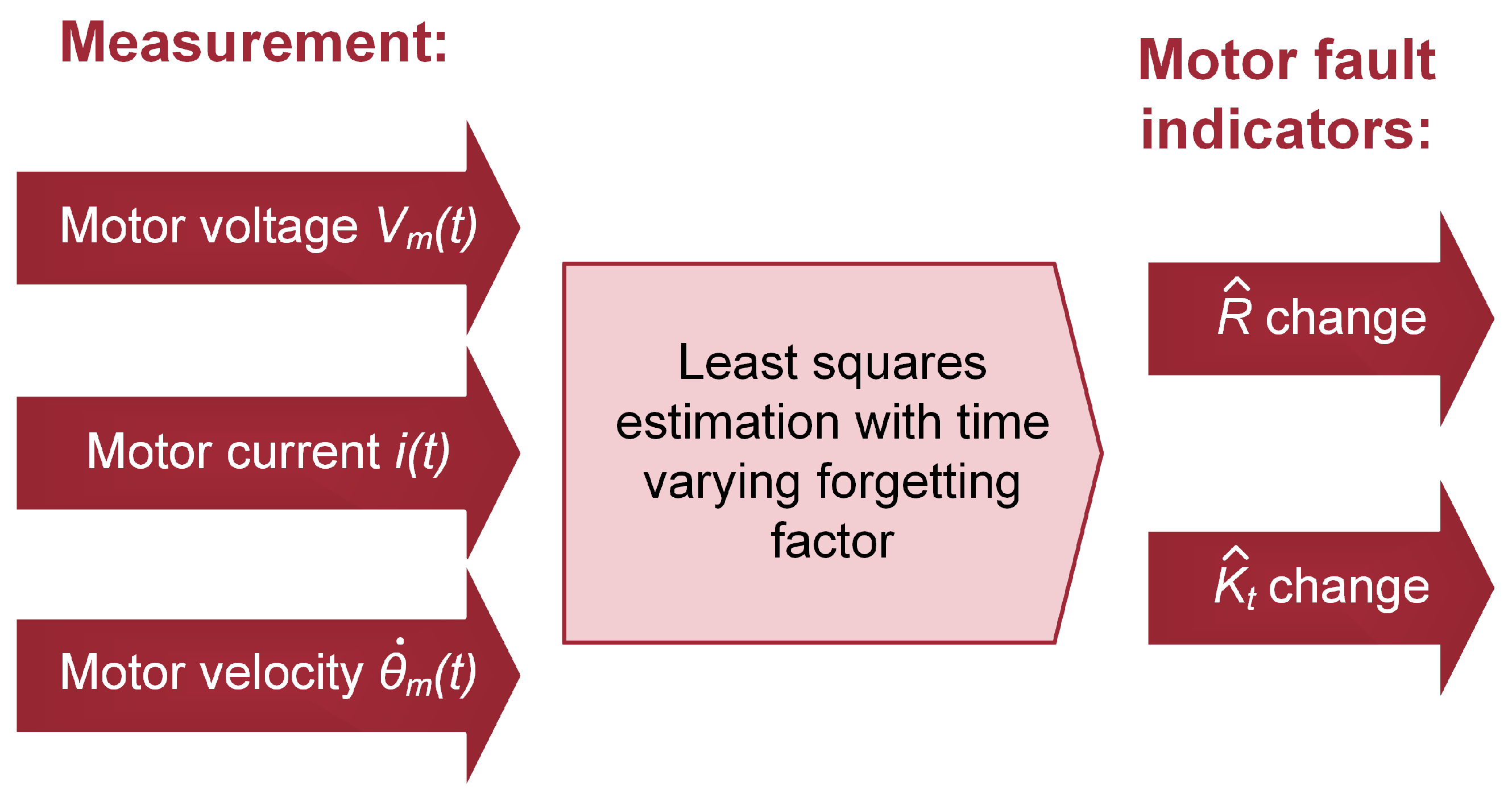
The proposal is to use the parameter estimation technique to determine the electrical parameters of a motor, that is, the resistance
and back EMF constant
, as shown in
Figure 8.
During normal operation, these live-calculated estimates are compared to predetermined parameters of a healthy system to detect a motor fault or a rotor position sensor fault.
Fault detection based on parameter estimation relies on the principle that possible faults in the monitored system can be associated with specific parameters and the mathematical model of the system is given in the form of an input–output relation (
3):
where
denotes the system output at time
t,
is a function of present and past observations of the system outputs and inputs, and
denotes a parameter vector that must be estimated. As
is unknown, assume that
is the estimate of
at time
t.
Considering the electrical subsystem of the EPS, the individual components of Equation (
3) are described as
R is the resistance,
is the back EMF constant of the assist DC motor, and
n is the gear ratio of the motor gear box. Signals
(armature current),
(voltage), and motor angular velocity (
) are measured.
stands for the pinion angle. The inductance of the motor is small and neglected.
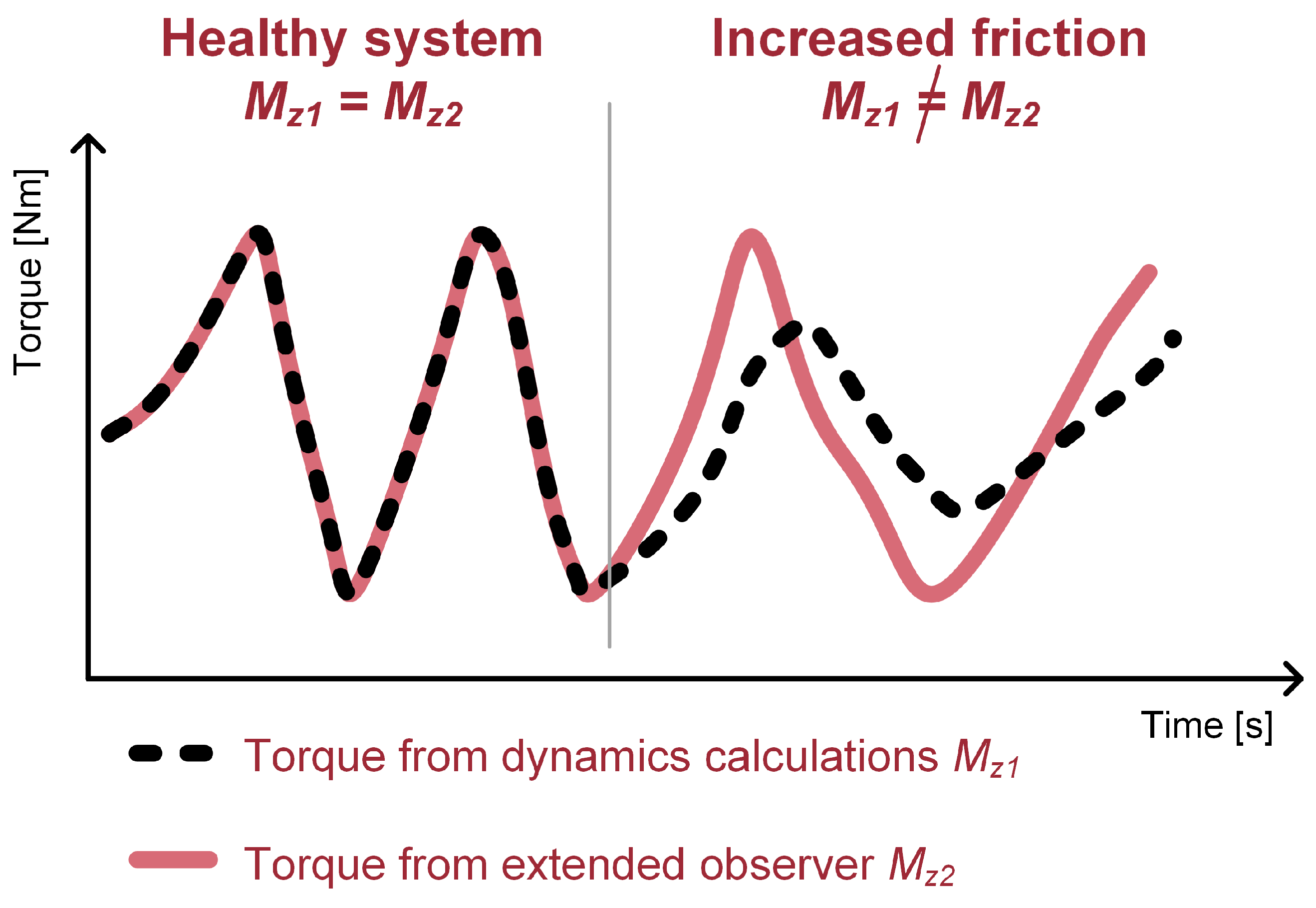
Diagnostics of mechanical failures of rack and pinion and motor bearings are also described. To detect an increase in friction in the gears, the authors propose estimating the self-aligning torque (SAT) using two methods. For a healthy system, both estimates have very similar values. For a system with increased friction, a difference appears between them and the variance in the error appears, as Formula (
5) shows:
This variance indicates the deviation of mechanical parameters from the nominal values, as
Figure 9 shows in a simplified way.
All the proposed algorithms are then combined into one method providing information about the health state of the system. The algorithm was verified in a computer simulation and a virtual environment (HIL) where the simulated vehicle performed steering maneuvers with and without faults. These revealed that the proposed fault detection and isolation methods could successfully detect malfunctions of the electrical and mechanical subsystems of the EPS.
Another interesting example of a motor diagnosis algorithm, although it was not specifically devoted to EPS, is presented in [
33]. In this paper, a fuzzy logic-based motor fault diagnosis system is described. The authors propose a hierarchical diagnosis scheme to provide a clearer classification and to increase the robustness of the algorithm. By this means, 14 faults of a DC motor could potentially be recognized.
The SELECT (Self-Learning Classification Tree) algorithm, which combines elements from decision trees and hybrid neuro-fuzzy schemes, was used. Using experimental data, the algorithm iteratively creates a set of fuzzy rules that form the decision tree. It automatically selects the symptoms for diagnostic decisions. To further improve the tree, structural human knowledge is used.
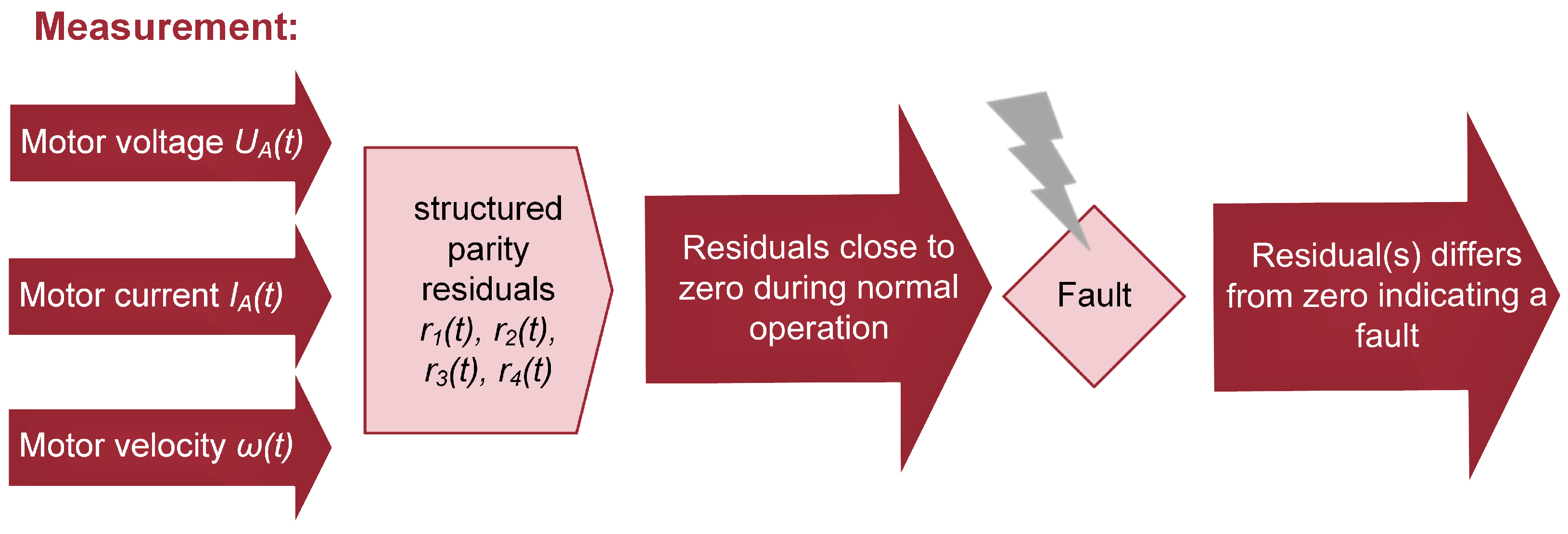
Figure 10 illustrates part of this concept; i.e., how to use the DC motor operating principle to detect that a fault situation has occurred.
For motor supervision, the following are measured: voltage
, current
, and velocity
. Based on the measurements and the adopted motor model, the structured parity residuals are computed according to Formulas (
6)–(
9):
where flux linkage
, rotor resistance
, rotor inductance
, and inertia
J are the electrical and mechanical parameters of the motor, and the term
represents viscous friction.
Under nominal operation conditions, the residuals are close to zero, but if a fault occurs, their values change. After detecting a fault, additional parameter estimation (symptom generation) is initiated to obtain the current motor parameters and recognize what the fault is. The newly developed diagnosis system was verified on a laboratory stand, where selected types of motor faults could be artificially introduced.
5.3. Algorithms Summary
Three different approaches for EPS control considering various component faults were presented. Their effectiveness has been demonstrated in laboratory test setups and in virtual vehicle environment tools. However, considering the operating conditions of the real vehicle, certain limitations may be indicated. They are collected in
Table 1.
The limitations of the analyzed methods can generally be divided into two groups:
Tire model limitations: the used model works only for small slip angles, because here the relationship between the lateral force and the slip angle is linear. For larger slip angles, the lateral force becomes strongly non-linear and the estimation method is no longer valid.
Electric motor model limitations: linear relationships ignore phenomena such as magnetic circuit saturation. The temperature impact is neglected, even though the EPS operating range is up to 165 °. This results in a limitation of the accuracy of the estimate and steering feel degradation.
Every algorithm discussed has its own disturbance rejection mechanism. Their function is to reject noise and to include parameter variability during the operation (because of temperature or wear). In [
33], the authors propose an adaptative threshold, while in [
31] parameters are estimated with a data-dependent, time-varying forgetting factor in order to decrease the sensitivity to noise. On the other hand, in [
30] a low-pass filter is used to filter out rough-road torque and noise in the estimation of torsion torque on the motor shaft.
The costs of introducing the additional mechanism for fault detection might vary significantly depending on the resources already present in the device and the type of algorithm that needs to be implemented. In the most favorable case, measuring devices that are already on the board can be used, such as motor current sensors or motor shaft position sensors, which are already collecting data for EPS control. Another important aspect is the available computing power. The best (and the cheapest) situation occurs when the available processing resources are sufficient to implement the algorithm, without the need for replacing computing devices with more powerful ones.
6. Summary and Conclusions
This paper presents the construction of electric power steering along with advanced computing tools dedicated to vehicle development and verification. Knowledge of the EPS structure combined with modern instruments enables the development of new diagnostic algorithms, enhancing the safety and reliability of the car. As has been shown, new technologies create opportunities that were previously unavailable: testing in the laboratory as on the test track. Virtual environments and real-time simulations significantly accelerate development and allow the evolution of cutting-edge functionalities. These tools create a space for the development of new algorithms and the enhancement of performance to meet even rigorous market requirements.
Failure of an EPS subcomponent could affect the operation of the entire power system. The effects vary significantly depending on the architecture of the power system in the vehicle. In this paper, the authors limit themselves only to the assist motor and its control and sensing systems, along with mechanical gears. Power system operation in a vehicle and its failures is a separate, extensive topic and it is not discussed here.
The literature concentrates on novel EPS control algorithms to improve the handling stability and safety of a vehicle, additionally making tuning easier. EPS is treated as a perfect actuator, with a simplified model that assists the driver. The production variance in EPS components and the degradation of the parameters over time are typically not taken into consideration. The detection of incipient faults in the electrical and electronic components of EPS has received little attention. The relationship between early-stage failures and EPS performance have not been discussed in detail. These will be further studied in follow-up work.
New fault detection methods, tailored for vehicles which currently are available on the market, are needed because of specific requirements for automotive devices. Developing fault detection algorithms, cooperating with various devices and control schemes, is needed to enable effective implementation.
Solutions that guarantee the cybersecurity of the entire EPS are described in a contract between the supplier and the car manufacturer (OEM). This is typically confidential information and it is not elaborated in this study.
This paper presents inputs required for the fault detection algorithms dedicated to selected EPS components. The signals measured during regular operation of the vehicle and the EPS are often enough to perform the detection. If the available computing power is sufficient to handle an additional algorithm, then it is clear that extensive fault detection possibilities are available at a considerable low cost for all cars with EPS. At that point, the primary task is the appropriate design of the algorithm, depending on the needs, available resources, and required accuracy. Therefore, the development of new fault detection methods is the direction for future work. Future research will mainly focus on damage to the electrical circuit of the EPS system. As part of the diagnostic process, it is planned to use signals such as back EMF or winding phase currents. Modern methods will be used to analyze these signals, such as wavelet transform, fast Fourier transform, and machine learning methods (AI), to classify failures.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}