
Non-Intrusive Reduced-Order Modeling Based on Parametrized Proper Orthogonal Decomposition



Abstract
:1. Introduction
2. Theory of Parametrized Reduction
2.1. The Database of High-Fidelity Solutions
2.2. The Improved Proper Orthogonal Decomposition
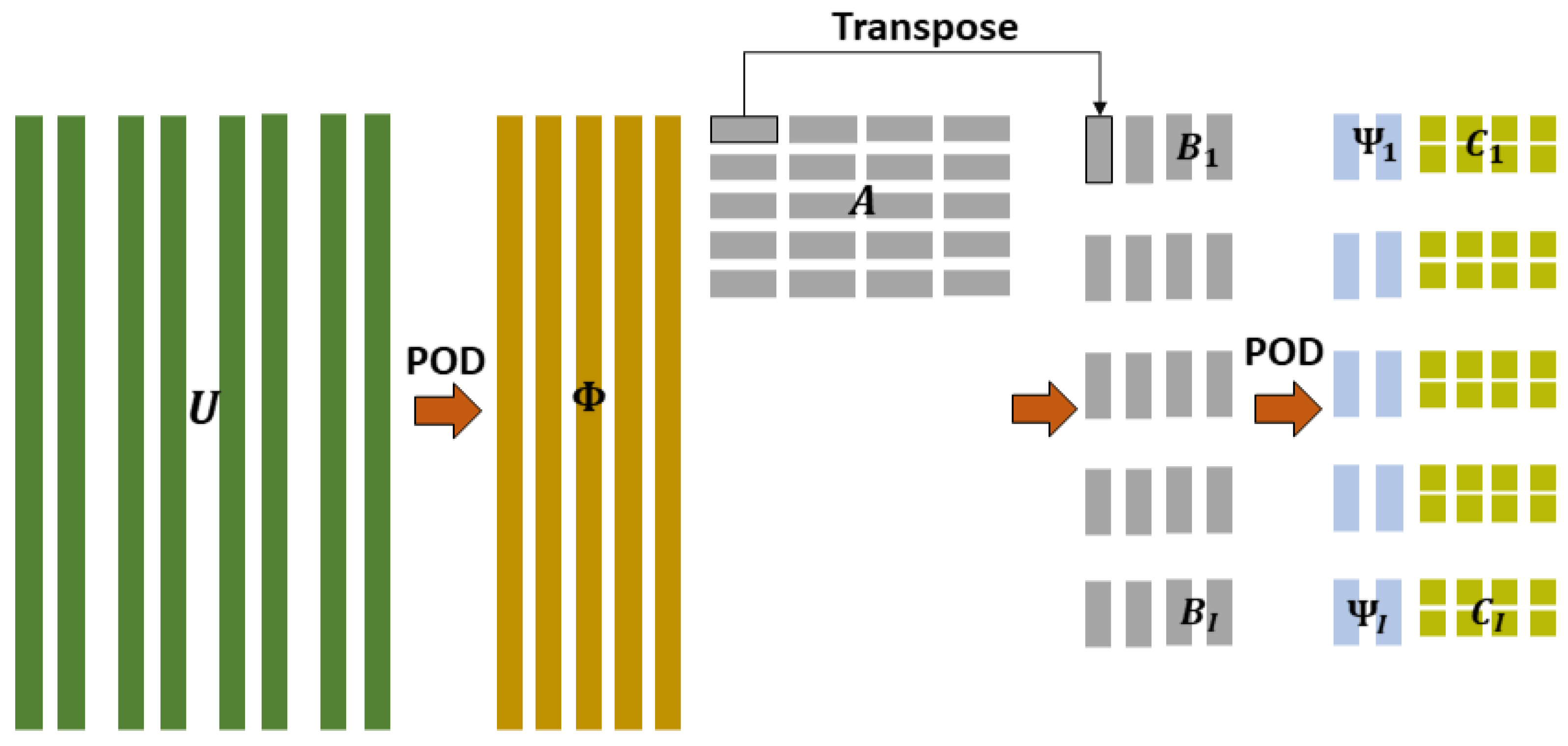
2.3. Reduction Based on Parametric POD
3. Parametrized ROMs Based on PPOD
3.1. Gaussian Process Regression Models
3.2. Framework of PPOD-ROMs
| Algorithm 1 ROM based on PPOD and GPR for parametrized time-dependent problems |
|
4. Numerical Examples
4.1. Flows Past a Cylinder
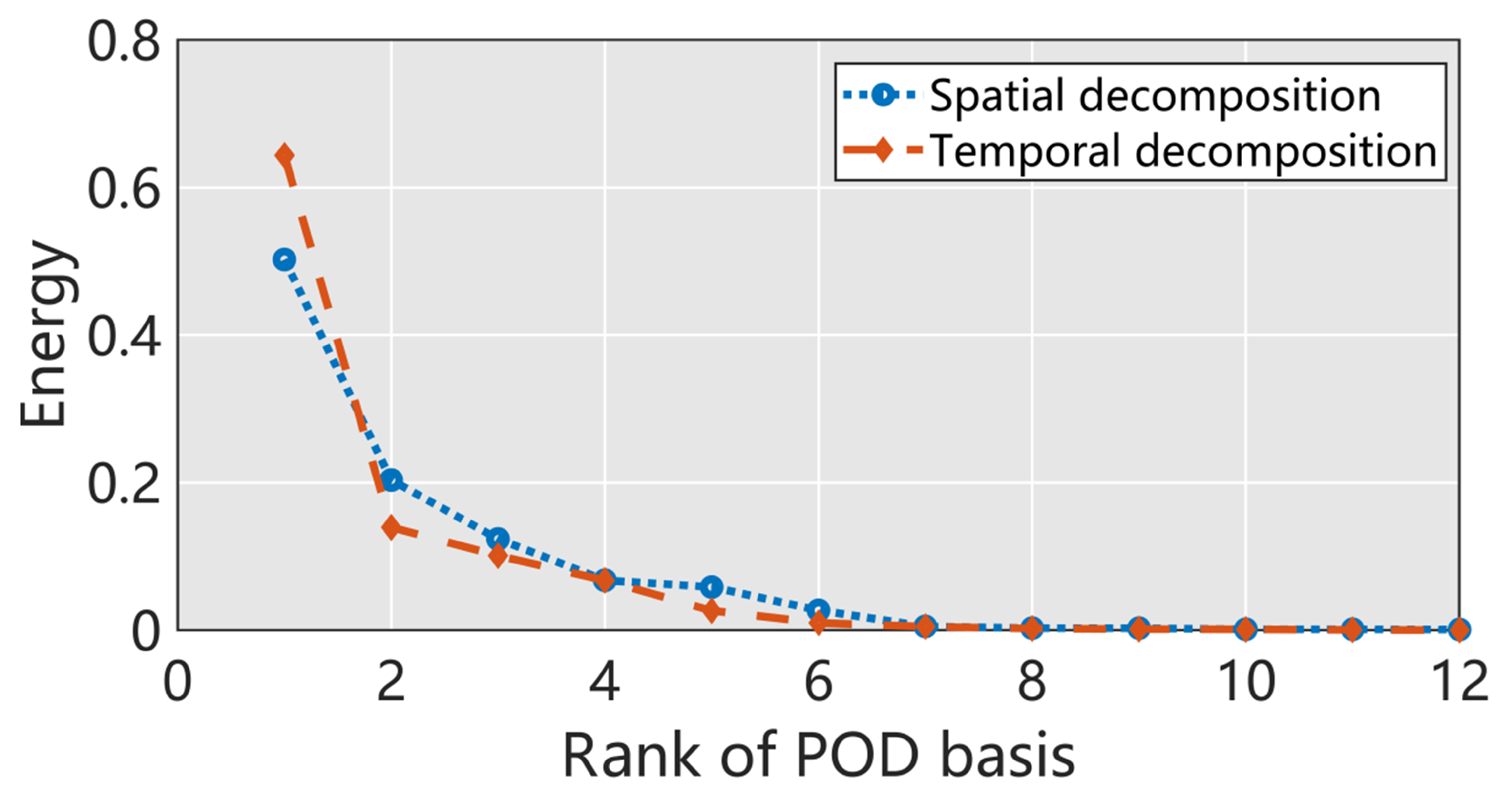
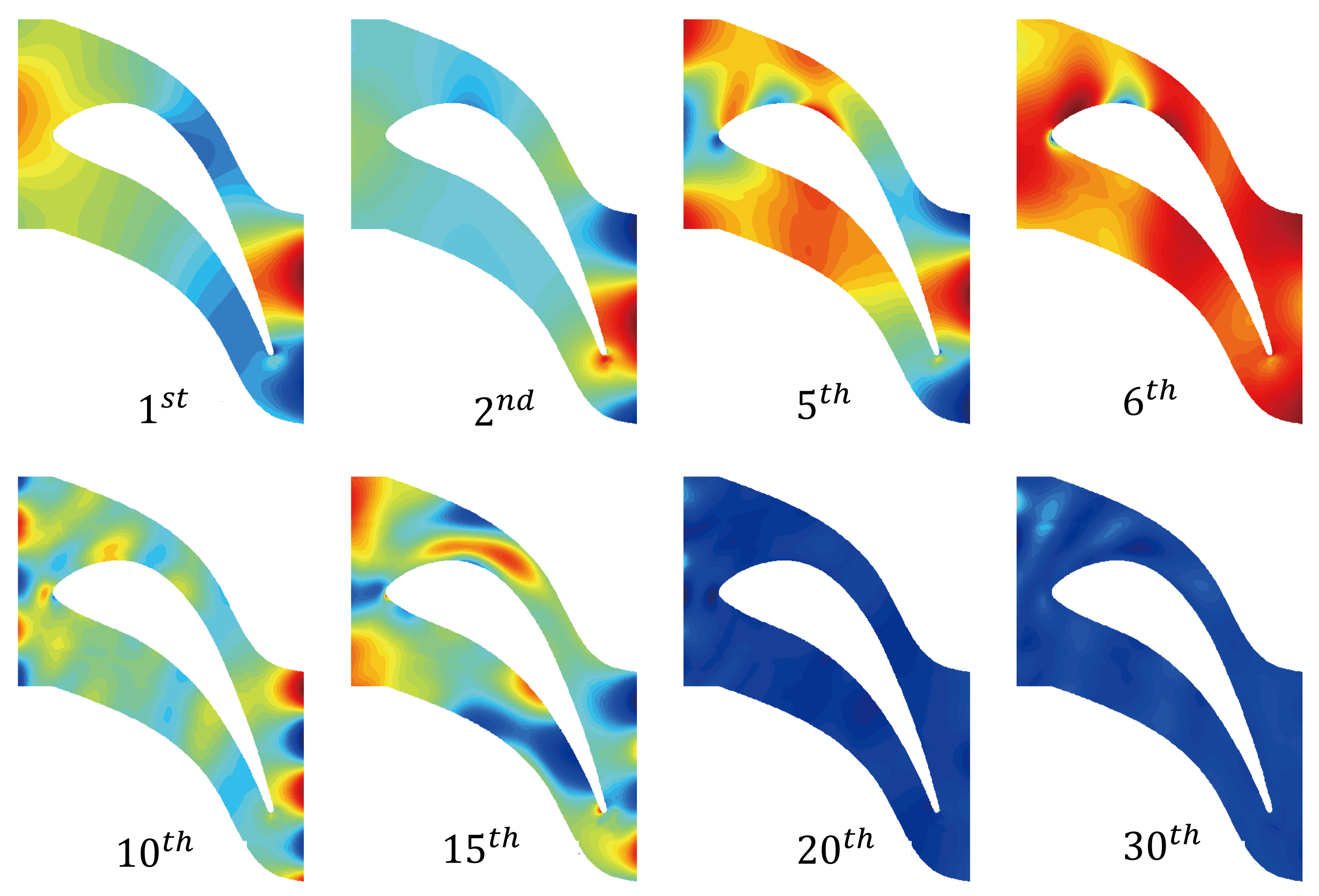
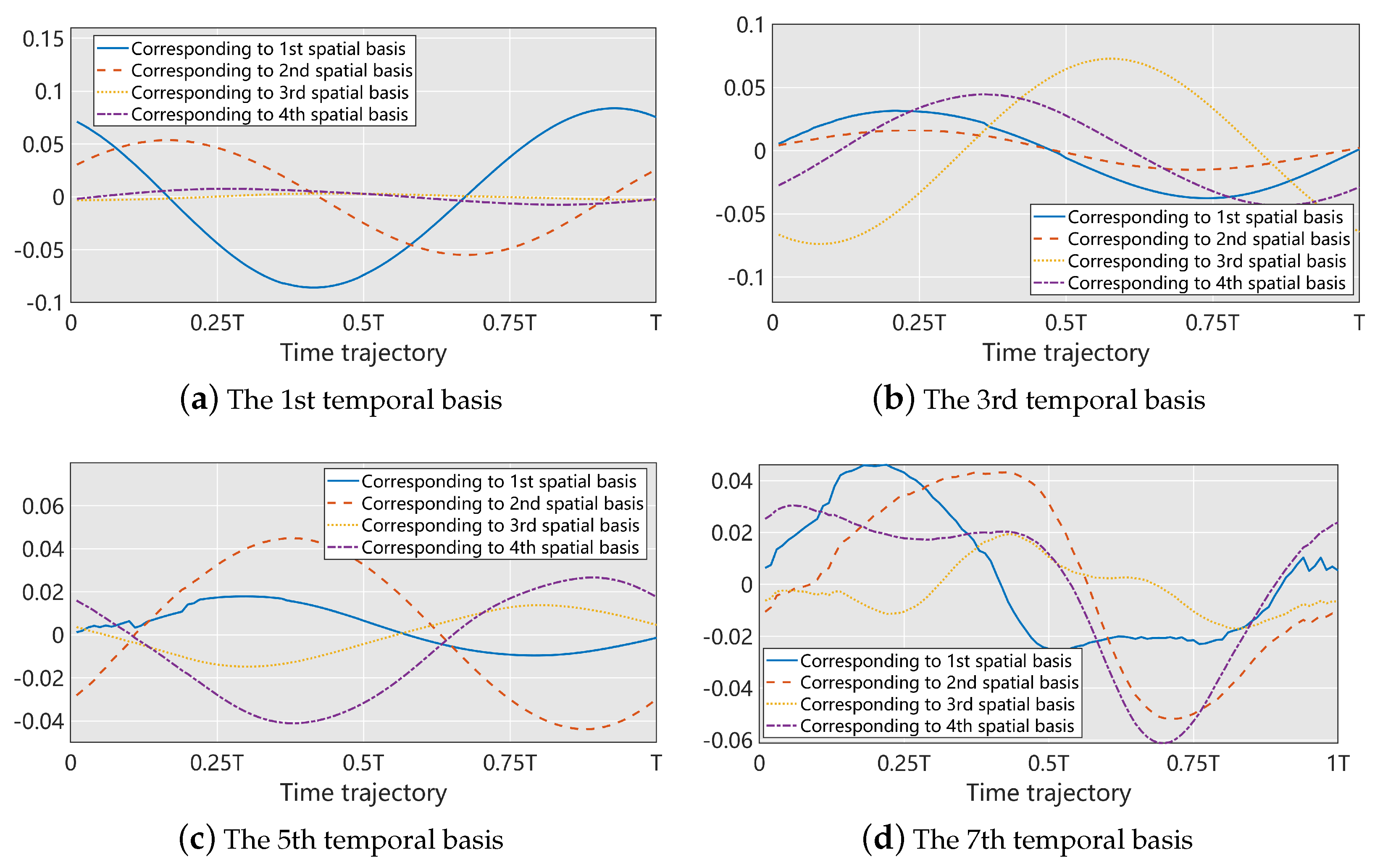
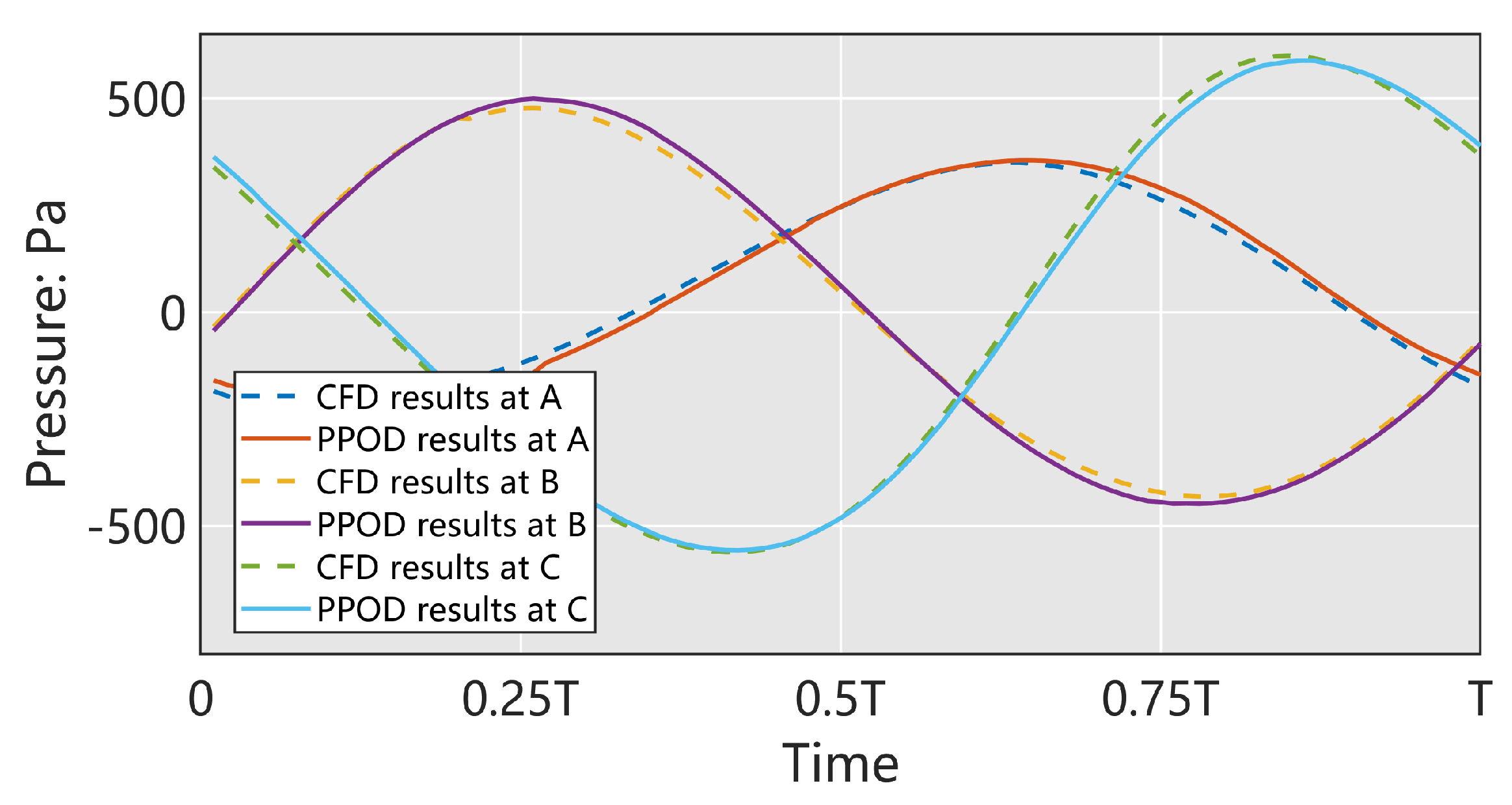
4.2. Turbine Flows with Clocking Effect
4.3. The Efficiency of the PPOD-ROM
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Prud’Homme, C.; Rovas, D.V.; Veroy, K. Reliable real-time solution of parametrized partial differential equations: Reduced-basis output bound methods. J. Fluids Eng. 2002, 124, 70–80. [Google Scholar] [CrossRef]
- Hesthaven, J.S.; Rozza, G.; Stamm, B. Certified Reduced Basis Methods for Parametrized Partial Differential Equations; Springer: Berlin/Heidelberg, Germany, 2016; Volume 590. [Google Scholar]
- Benner, P.; Gugercin, S.; Willcox, K. A survey of projection-based model reduction methods for parametric dynamical systems. SIAM Rev. 2015, 57, 483–531. [Google Scholar] [CrossRef]
- Haasdonk, B.; Dihlmann, M.; Ohlberger, M. A training set and multiple bases generation approach for parameterized model reduction based on adaptive grids in parameter space. Math. Comput. Model. Dyn. Syst. 2011, 17, 423–442. [Google Scholar] [CrossRef]
- Haasdonk, B.; Ohlberger, M. Space-adaptive reduced basis simulation for time-dependent problems. In Proceedings of the Vienna International Conference on Mathematical Modelling, Vienna, Austria, 11–13 February 2009. [Google Scholar]
- Maday, Y. Reduced basis method for the rapid and reliable solution of partial differential equations. In Proceedings of the International Conference of Mathematicians, Madrid, Spain, 22–30 August 2006. [Google Scholar]
- Quarteroni, A.; Manzoni, A.; Negri, F. Reduced Basis Methods for Partial Differential Equations: An Introduction; Springer: Berlin/Heidelberg, Germany, 2015; Volume 92. [Google Scholar]
- Binev, P.; Cohen, A.; Dahmen, W. Convergence rates for greedy algorithms in reduced basis methods. SIAM J. Math. Anal. 2011, 43, 1457–1472. [Google Scholar] [CrossRef]
- DeVore, R.; Petrova, G.; Wojtaszczyk, P. Greedy algorithms for reduced bases in Banach spaces. Constr. Approx. 2013, 37, 455–466. [Google Scholar] [CrossRef]
- Dahmen, W.; Plesken, C.; Welper, G.; Wojtaszczyk, P. Double greedy algorithms: Reduced basis methods for transport dominated problems. ESAIM: Math. Model. Numer. Anal. 2014, 48, 623–663. [Google Scholar] [CrossRef]
- Schmid, P.J. Dynamic mode decomposition of numerical and experimental data. J. Fluid Mech. 2010, 656, 5–28. [Google Scholar] [CrossRef]
- Le Clainche, S.; Vega, J.M. Higher order dynamic mode decomposition. SIAM J. Appl. Dyn. Syst. 2017, 16, 882–925. [Google Scholar] [CrossRef]
- Schmid, P.J. Dynamic mode decomposition and its variants. Annu. Rev. Fluid Mech. 2022, 54, 225–254. [Google Scholar] [CrossRef]
- Berkooz, G.; Holmes, P.; Lumley, J.L. The proper orthogonal decomposition in the analysis of turbulent flows. Annu. Rev. Fluid Mech. 1993, 25, 539–575. [Google Scholar] [CrossRef]
- Chatterjee, A. An introduction to the proper orthogonal decomposition. Curr. Sci. 2000, 78, 808–817. [Google Scholar]
- Ly, H.V.; Tran, H.T. Modeling and control of physical processes using proper orthogonal decomposition. Math. Comput. Model. 2001, 33, 223–236. [Google Scholar] [CrossRef]
- Kerschen, G.; Golinval, J.; Vakakis, A.F. The method of proper orthogonal decomposition for dynamical characterization and order reduction of mechanical systems: An overview. Nonlinear Dyn. 2005, 41, 147–169. [Google Scholar] [CrossRef]
- Chen, G.; Wang, X.; Li, Y. Reduced-order-model-based placement optimization of multiple control surfaces for active aeroelastic control. Int. J. Comput. Methods 2014, 11, 1350081. [Google Scholar] [CrossRef]
- Alghosoun, A.; Mocayd, N.E.; Seaid, M. A nonintrusive reduced-order model for uncertainty quantification in numerical solution of one-dimensional free-surface water flows over stochastic beds. Int. J. Comput. Methods 2022, 19, 2150073. [Google Scholar] [CrossRef]
- Timokhin, I.V.; Matveev, S.A.; Tyrtyshnikov, E.E.; Smirnov, A.P. Model reduction in Smoluchowski-type equations. Russ. J. Numer. Anal. Math. Model. 2022, 37, 63–72. [Google Scholar] [CrossRef]
- Rozza, G.; Huynh, D.B.P.; Patera, A.T. Reduced basis approximation and a posteriori error estimation for affinely parametrized elliptic coercive partial differential equations: Application to transport and continuum mechanics. Arch. Comput. Methods Eng. 2008, 15, 229–275. [Google Scholar] [CrossRef]
- Patera, A.T.; Rozza, G. Reduced Basis Approximation and a Posteriori Error Estimation for Parametrized Partial Differential Equations; Massachusetts Institute of Technology: Cambridge, MA, USA, 2006. [Google Scholar]
- Chen, W.; Hesthaven, J.S.; Bai, J.; Qiu, Y.; Yang, Z.; Yang, T. Greedy nonintrusive reduced order model for fluid dynamics. AIAA J. 2018, 56, 4927–4943. [Google Scholar] [CrossRef]
- Grepl, M.A.; Maday, Y.; Nguyen, N.C.; Patera, A.T. Efficient reduced-basis treatment of nonaffine and nonlinear partial differential equations. ESAIM Math. Model. Numer. Anal. 2007, 41, 575–605. [Google Scholar] [CrossRef]
- Barrault, M.; Maday, Y.; Nguyen, N.C.; Patera, A.T. An ‘empirical interpolation’method: Application to efficient reduced-basis discretization of partial differential equations. C. R. Math. 2004, 339, 667–672. [Google Scholar] [CrossRef]
- Chaturantabut, S.; Sorensen, D.C. Nonlinear model reduction via discrete empirical interpolation. SIAM J. Sci. Comput. 2010, 32, 2737–2764. [Google Scholar] [CrossRef]
- Astrid, P.; Weiland, S.; Willcox, K.; Backx, T. Missing point estimation in models described by proper orthogonal decomposition. IEEE Trans. Autom. Control 2008, 53, 2237–2251. [Google Scholar] [CrossRef]
- Carlberg, K.; Farhat, C.; Cortial, J.; Amsallem, D. The GNAT method for nonlinear model reduction: Effective implementation and application to computational fluid dynamics and turbulent flows. J. Comput. Phys. 2013, 242, 623–647. [Google Scholar] [CrossRef]
- Chen, H. Blackbox Stencil Interpolation Method for Model Reduction. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2012. [Google Scholar]
- Yu, J.; Yan, C.; Guo, M. Non-intrusive reduced-order modeling for fluid problems: A brief review. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 5896–5912. [Google Scholar] [CrossRef]
- Rajaram, D.; Perron, C.; Puranik, T.G.; Mavris, D.N. Randomized algorithms for non-intrusive parametric reduced order modeling. AIAA J. 2020, 58, 5389–5407. [Google Scholar] [CrossRef]
- Timokhin, I.; Matveev, S.; Tyrtyshnikov, E. Model reduction for Smoluchowski equations with particle transfer. Russ. J. Numer. Anal. Math. Model. 2021, 36, 177–181. [Google Scholar] [CrossRef]
- Audouze, C.; De, V.F.; Nair, P.B. Nonintrusive reduced-order modeling of parametrized time-dependent partial differential equations. Numer. Methods Partial Differ. Equ. 2013, 29, 1587–1628. [Google Scholar] [CrossRef]
- Wang, Q.; Hesthaven, J.S.; Ray, D. Non-intrusive reduced order modeling of unsteady flows using artificial neural networks with application to a combustion problem. J. Comput. Phys. 2019, 384, 289–307. [Google Scholar] [CrossRef]
- Guo, M.; Hesthaven, J.S. Data-driven reduced order modeling for time-dependent problems. Comput. Methods Appl. Mech. Eng. 2019, 345, 75–99. [Google Scholar] [CrossRef]
- Li, T.; Deng, S.; Zhang, K.; Wei, H.; Wang, R.; Fan, J.; Xin, J.; Yao, J. A nonintrusive parametrized reduced-order model for periodic flows based on extended proper orthogonal decomposition. Int. J. Comput. Methods 2021, 18, 2150035. [Google Scholar] [CrossRef]
- Xiao, D.; Fang, F.; Pain, C.; Navon, I. A parameterized non-intrusive reduced order model and error analysis for general time-dependent nonlinear partial differential equations and its applications. Comput. Methods Appl. Mech. Eng. 2017, 317, 868–889. [Google Scholar] [CrossRef]
- Lukashevich, D.; Ovchinnikov, G.; Tyukin, I.Y.; Matveev, S.; Brilliantov, N. Data-driven approach for modeling coagulation kinetics. Comput. Math. Model. 2022, 33, 310–318. [Google Scholar] [CrossRef]
- Duan, J.; Hesthaven, J.S. Non-intrusive data-driven reduced-order modeling for time-dependent parametrized problems. arXiv 2023, arXiv:2303.02986. [Google Scholar] [CrossRef]
- Rasmussen, C.E.; Williams, C.K. Gaussian processes in machine learning. In Summer School on Machine Learning; Springer: Berlin/Heidelberg, Germany, 2003; pp. 63–71. [Google Scholar]
- Guo, M.; Hesthaven, J.S. Reduced order modeling for nonlinear structural analysis using Gaussian process regression. Comput. Methods Appl. Mech. Eng. 2018, 341, 807–826. [Google Scholar] [CrossRef]
- Xiao, D.; Fang, F.; Pain, C.; Hu, G. Non-intrusive reduced-order modelling of the Navier–Stokes equations based on RBF interpolation. Int. J. Numer. Methods Fluids 2015, 79, 580–595. [Google Scholar] [CrossRef]
- Taira, K.; Brunton, S.L.; Dawson, S.T.; Rowley, C.W.; Colonius, T.; McKeon, B.J.; Schmidt, O.T.; Gordeyev, S.; Theofilis, V.; Ukeiley, L.S. Non-intrusive reduced-order modelling of the Navier–Stokes equations based on RBF interpolation. AIAA J. 2017, 55, 4013–4041. [Google Scholar] [CrossRef]
- Mackay, D.J. Introduction to Gaussian processes. NATO ASI Ser. F Comput. Syst. Sci. 1998, 168, 133–166. [Google Scholar]
- Stading, J.; Friedrichs, J.; Waitz, T.; Dobriloff, C.; Becker, B.; Gummer, V. The potential of rotor and stator clocking in a 2.5-stage low-speed axial compressor. In Proceedings of the ASME Turbo Expo 2012: Turbine Technical Conference and Exposition, Volume 8: Turbomachinery, Parts A, B, and C, Copenhagen, Denmark, 11–15 June 2012; pp. 2453–2466. [Google Scholar]
- Huang, H.; Yang, H.; Feng, G.; Wang, Z. Fully clocking effect in a two-stage compressor. In Proceedings of the ASME Turbo Expo 2003, Collocated with the 2003 International Joint Power Generation Conference, Volume 6: Turbo Expo 2003, Parts A and B, Atlanta, GA, USA, 16–19 June 2003; pp. 1051–1061. [Google Scholar]
- Mileshin, V.; Savin, N.; Kozhemyako, P.; Druzhinin, Y.M. Numerical and experimental analysis of radial clearance influence on rotor and stator clocking effect by example of model high loaded two stage compressor. In Proceedings of the ASME Turbo Expo 2014: Turbine Technical Conference and Exposition, Volume 2A: Turbomachinery, Düsseldorf, Germany, 16–20 June 2014. V02AT37A037. [Google Scholar]
- Wei, H.; Cao, Z.; Li, T.; Fan, J.; Chen, C.; Yao, J. Parametric modelling of unsteady load for turbine cascade and its application in clocking effect optimization and load-reduction. Aerosp. Sci. Technol. 2022, 127, 107669. [Google Scholar] [CrossRef]
- Burhenne, S.; Jacob, D.; Henze, G.P. Sampling based on Sobol’sequences for Monte Carlo techniques applied to building simulations. In Proceedings of the Building Simulation 2011: 12th Conference of International Building Performance Simulation Association, Sydney, Australia, 14–16 November 2011. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Truncation Orders | e | ||
|---|---|---|---|
| 0.101 | 0.003 | 0.103 | |
| 0.003 | 0.001 | 0.004 | |
| 0.001 | 0.000 | 0.001 | |
| 0.000 | 0.000 | 0.000 |
| CFD Settings | Value |
|---|---|
| The pitch of blade (m) | 0.0418 |
| Speed of rotors (m/s) | 100 |
| The total pressure of inlet (Pa) | 166,600 |
| The temperature of inlet (K) | 309 |
| The pressure of outlet (Pa) | 101,325 |
| The temperature of outlet (K) | 309 |
| Truncation Rank | e | ||
|---|---|---|---|
| 0.498 | 0.357 | 0.677 | |
| 0.170 | 0.116 | 0.266 | |
| 0.005 | 0.002 | 0.006 | |
| 0.000 | 0.000 | 0.000 |
| Method | Extraction of Bases | GPR Training | Prediction/Solution |
|---|---|---|---|
| PPOD-ROM for case 1 | 42.71 | 39.76 | 0.02 |
| CFD model for case 1 | 0 | 0 | 640.72 |
| PPOD-ROM for case 2 | 13.24 | 18.12s | 0.06 |
| CFD model for case 2 | 0 | 0 | 2045.16 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, T.; Pan, T.; Zhou, X.; Zhang, K.; Yao, J. Non-Intrusive Reduced-Order Modeling Based on Parametrized Proper Orthogonal Decomposition. Energies 2024, 17, 146. https://doi.org/10.3390/en17010146
Li T, Pan T, Zhou X, Zhang K, Yao J. Non-Intrusive Reduced-Order Modeling Based on Parametrized Proper Orthogonal Decomposition. Energies. 2024; 17(1):146. https://doi.org/10.3390/en17010146
Chicago/Turabian StyleLi, Teng, Tianyu Pan, Xiangxin Zhou, Kun Zhang, and Jianyao Yao. 2024. "Non-Intrusive Reduced-Order Modeling Based on Parametrized Proper Orthogonal Decomposition" Energies 17, no. 1: 146. https://doi.org/10.3390/en17010146
APA StyleLi, T., Pan, T., Zhou, X., Zhang, K., & Yao, J. (2024). Non-Intrusive Reduced-Order Modeling Based on Parametrized Proper Orthogonal Decomposition. Energies, 17(1), 146. https://doi.org/10.3390/en17010146