1. Introduction
Gas-insulated switchgear (GIS) is widely used in electric power systems due to its advantages of small floor space, high reliability, long maintenance cycle, immunity from environmental pollution and high altitude [
1,
2]. In recent years, GIS equipment failure has occurred frequently. GIS equipment failure will not only cause complete shutdown or partial power failure of the substation, but also cause power loss, increase maintenance cost, affect PD reliability of the power grid, and pose a significant threat to the safe operation of the power grid [
3]. When PD occurs inside GIS, electromagnetic wave signals are generated, radiating to the surrounding area. Moreover, electromagnetic wave signals have the characteristics of anti-electromagnetic solid interference and strong directionality, which provides a theoretical basis for the localization of PD [
4]. The localization algorithm plays a crucial role in the localization of partial discharge [
5,
6,
7].
There are several mature online monitoring techniques for partial discharge, such as the ultra-high-frequency detection method [
8] and the ultrasonic detection method [
9]. However, ultrasonic signals attenuate quickly during propagation in GIS and are susceptible to equipment vibration interference, making ultrasonic detection generally unsuitable for partial discharge in GIS [
10]. The ultra-high-frequency detection method has strong anti-interference ability, high sensitivity, and is not affected by mechanical vibration, making it the main means of partial discharge online monitoring currently [
11].
The methods for UHF-based partial discharge localization for GIS equipment usually include time of arrival (TOA), time difference of arrival (TDOA), and received signal strength (RSS). Ahmad Hafiz Mohd Hashim et al. [
12] proposed a method for locating partial discharges (PD) in oil-filled equipment using acoustic emission (AE) and fuzzy logic. The method involves pre-processing data with discrete wavelet transform (DWT), analysing it with time of arrival (TOA), and applying fuzzy logic Mamdani (FLM) and Takagi–Sugeno (FLTS) methods to determine the distance between the PD and AE sensors. Ephraim Tersoo Iorkyase et al. [
13] proposed a cost-effective radio fingerprinting technique. This technique uses the received signal strength (RSS) extracted from PD measurements gathered using RF sensors. The results demonstrated that the neural network produced superior performance as a result of its robustness against noise. The TDOA method based on UHF is the most widely used method for partial discharge localization in GIS equipment [
14,
15,
16].
During the PD source localization process, the TDOA method is first used to establish a non-linear system of equations based on the different time delays of the electromagnetic wave signals arriving at the receiving antennas. The non-linear system is then iteratively solved using non-linear optimization methods to obtain the accurate location of the PD source. The methods for finding the optimal solution in solving the equations include PSO [
17], least squares method [
18], genetic algorithm [
19] and other methods. Traditional algorithms are computationally complex and require careful selection of the initial values. When the initial values are not properly chosen, the localization result may not converge or even diverge.
The traditional PD source localization algorithm often fails to provide the correct position of the PD, so some researchers have improved it using intelligent algorithms. Meka et al. [
20] adjusted the inertia weight of PSO effectively by using 49 and 9 simple IF-THEN fuzzy rules to improve the global optimal solution, weaken the local convergence problem and improve accuracy when estimating the PD source position. Xiaoxing Zhang et al. [
21] proposed a PD location method based on the Taylor–genetic algorithm. The Taylor expansion method is used to solve hyperbolic equations, and the genetic algorithm is utilized to search for the optimal initial point. The results show that using the genetic algorithm to find an appropriate initial point greatly enhances the feasibility of the Taylor algorithm. Junyi Cai et al. [
22] proposed a hybrid DE-PSO algorithm by combining the advantages of the differential evolution (DE) algorithm and the particle swarm optimization (PSO) algorithm, which can maintain great diversity even at the later stages of the calculation. The simulation and experimental results showed that the proposed algorithm has excellent performance with high accuracy and strong robustness, and it can meet the needs of field applications. Sourav Dhara et al. [
23] proposed a near-field-based approach for localization of PD sources with the help of a TDOA scheme. The result indicates the superiority of the proposed near-field-based approach. Agostino Forestiero [
24] proposed a heuristic method that utilizes swarm intelligence techniques to construct a recommender engine in an IoT environment. The method represents smart objects using real-valued vectors obtained through the Doc2Vec model and employs a bio-inspired model, the flocking model, to perform simple and local operations autonomously to achieve global intelligent organization. A similarity rule based on the assigned vectors is designed to cluster similar agents. The intelligent positioning allows for easy identification of similar smart objects, thus enabling fast and effective selection operations. Experimental results demonstrate that the proposed method improves clustering quality and relevance performance by about 50%. Agostino Forestiero et al. [
25] proposed a multi-agent-based approach for spatial sorting and discovery of resource information provided by Grid. The behaviour of these agents is inspired by ant colonies, and they can replicate or simply relocate resource descriptors. By setting parameters similar to the ant pheromone mechanism, the balance between these two objectives can be adjusted. The balance can be either static or dynamic. In the latter case, a “epidemic” mechanism is used to convey the value of this parameter to the hosts and agents of the Grid. Simulation analysis confirms the effectiveness of the reorganization and discovery protocols as well as the aforementioned virus adjustment mechanism.
The traditional AFSA algorithm optimizes and solves problems through four behaviours, but it is prone to getting stuck in local optimal solutions. Although it can obtain an approximate global optimal solution, its search horizon and step size are fixed, which can lead to premature convergence and reduce global optimization ability. To address these issues and leverage the characteristics of AFSA, an AFSA algorithm with adaptive parameters to improve the search horizon and step size is proposed. Increasing the search horizon and step size in the early stage of the algorithm can help it quickly discover potential optimal or better solutions and avoid getting stuck in local optimal solutions. As the search progresses, the algorithm gradually reduces the size of the search horizon and step size to finely search the search space, further improving the convergence performance and search accuracy of the algorithm. This adaptive strategy can improve the search efficiency and accuracy of the algorithm, avoid it becoming stuck in local optimal solutions, and ensure that the algorithm searches for the optimal solution in the global scope. Optimization improvements in algorithms can enhance the accuracy of partial discharge localization when applied.
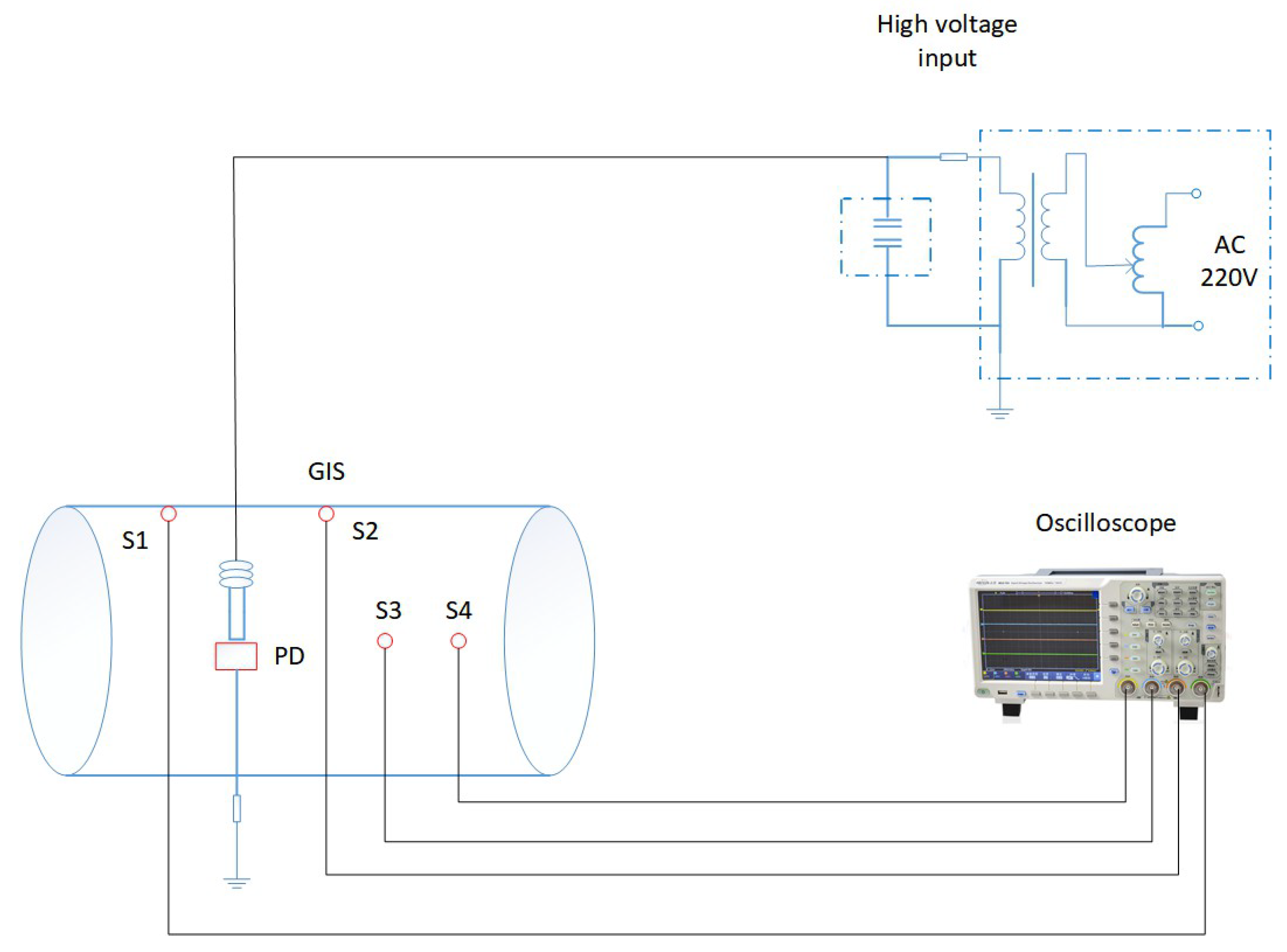
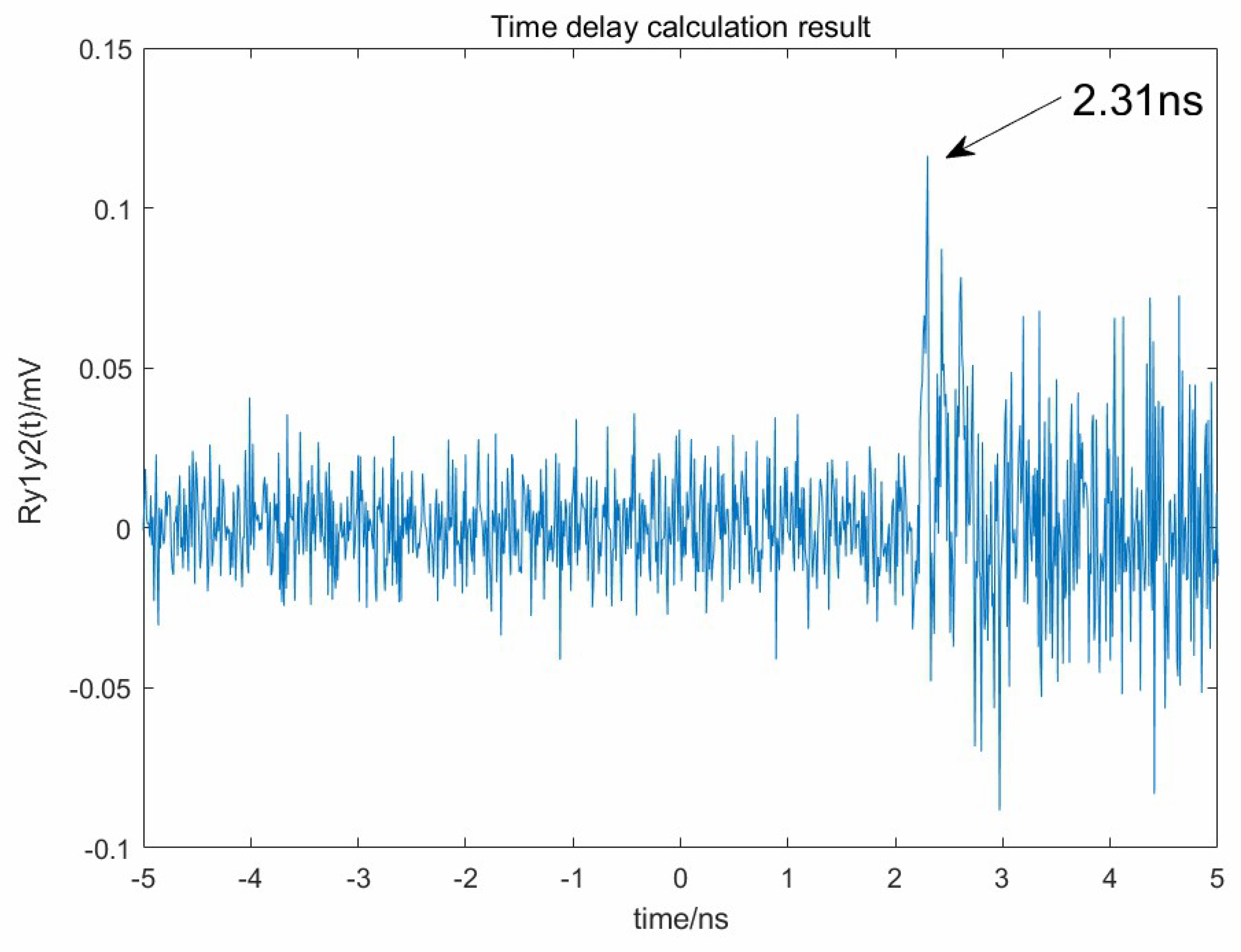
Therefore, we conducted research on intelligent algorithms for partial discharge localization and proposed a three-dimensional localization algorithm based on a TDOA model using an IAFSA algorithm. The main steps include the following: Firstly, it is necessary to construct a mathematical model of the GIS physical entity and partial discharge for subsequent calculations. We acquire and pre-process partial discharge ultra-high-frequency electromagnetic wave data using an oscilloscope. Secondly, we use the generalized cross-correlation algorithm to calculate the delay of partial discharge and obtain the delay data of each receiving antenna. Thirdly, we input the delay data into the IAFSA to solve the localization of the partial discharge source. The main contributions are as follows:
- (1)
The algorithm introduces exploration behaviour based on the traditional artificial bee colony algorithm, making the algorithm more globally optimal and avoiding becoming stuck in local optimal solutions by introducing new random factors.
- (2)
The algorithm uses dynamic parameters to adjust the value of parameters according to the search process to more accurately locate the partial discharge source.
- (3)
We build an experimental platform and conduct on-site experiments to verify the practical application effectiveness of our algorithm in engineering.
3. Improved AFSA
The AFSA [
29,
30,
31,
32] is an artificial intelligence algorithm realized by simulating the group behaviour of natural organisms. It adopts a bottom-up approach and a behaviour-based artificial intelligence method. The idea is that, for example, in water fish tend to find the highest concentrations of food and flock towards them. Therefore, by simulating the daily behaviour of fish, it is possible to find the location with the highest food concentration, namely, the optimal solution.
3.1. Adaptive Vision Field and Step Length
3.1.1. Adaptive Vision Field
AFSA has the advantages of a good global parallel ability, simple structure, and fast convergence speed in the early stages. However, it also has the disadvantages of slower convergence speeds in the late stages and can easily fall into a local optimum. When applied to PD localization, the accuracy is low. Concerning its slow convergence speed in the later stages, this paper adopts adaptive parameters, with smaller adaptive parameters in the later iteration process to not only enhances convergence speed, but to also improve the optimization accuracy.
In the traditional AFSA, the vision field and step length of artificial fish are fixed when they perform praying, swarming and following, which decreases the search accuracy and affects the convergence speed. The specific performance is as follows: the larger the field of vision, the stronger the global search ability with a faster convergence speed, while when the field of vision is smaller, the local search ability becomes stronger. The larger the step length, the faster the convergence speed, but there may be an oscillation phenomenon. However, as the step length becomes smaller, the convergence speed tends to slow, but with higher accuracy.
Figure 4 shows the schematic diagram of the vision field
Visual and step length
Step. When the food concentration at position
f in the vision field is greater than that at the current position
f, the artificial fish will step forward to
f. Otherwise, the fish will search for other locations, such as
f and
f.
Therefore, in the early stages the convergence speed and search-ability of the global optimal solution are improved by enlarging the vision field and step length. In the middle stage, the vision field and step length are gradually reduced to find the local optimal solution. In the late stage, the vision field and step length are reduced to a minimum, and the search is focussed in the remaining small area. The improved updated formula of the vision field could be expressed as:
where
k is the number of the current iteration.
When fish choose a behaviour, they usually choose the pray behaviour. Considering this characteristic, we only need to adjust the related mechanism of the pray behaviour. The fish obtain a reasonable vision field in the early stage, and this decreases with the optimization iterations. As a result, the dynamic changing of the vision field based on the number of iterations is helpful to carry out an accurate local search in the neighbourhood of the optimal solution. The adaptive change of the vision field makes the algorithm have a faster optimization speed and ensures the accuracy of the final optimal solution.
3.1.2. Adaptive Step Length
In the traditional AFSA, the individual fish moves forward with a fixed step length, often leading the later iterative solution to fall into a local optimum which is difficult to jump out. To avoid such a situation and to balance the stability and efficiency of the algorithm, this paper adopts an adaptive step length, expressed as:
where
k is the number of the current iteration.
The improved pray behaviour based on an adaptive step length ensures the optimal individual fish can participate in the next iteration, and the sub-optimal individual fish can participate in the next iteration with a certain probability. The updated sub-optimal individual fish makes the fish jump out from the local optimum to select the next round of behaviour, and finally achieve the global optimal solution.
3.2. Behaviour Description of the IAFSA
3.2.1. Improved Pray Behaviour
When praying, the current position and food concentration of the fish are labelled as f and F, respectively. Furthermore, within the perceptual range of the fish, a random point is selected and marked as f with the food concentration F. When F > F, the fish advances one step towards f. Otherwise, the state f is randomly re-selected for the subsequent judgment. After repeating trynumber times, if the updated condition is still not met, the investigation behaviour is carried out.
The update formula for the pray behaviour is expressed as:
where
Rand is a random number of (0,1) and
is the distance between
f and
f.
f represents the the next position of the fish.
3.2.2. Improved Swarm Behaviour
When swarming, within the perceptual range of the fish, there are
n partners and the centre position of these partners is
f with the food concentration
.
F/
n >
indicates that there is more food at
f and its surroundings are not crowded, then the fish moves one step towards
f. Otherwise, the pray behaviour is carried out. The update formula for the swarm behaviour is:
where
represents the crowding factor, and
n is the fish partners.
3.2.3. Improved Follow Behaviour
When following, once a fish has found that food is abundant around its partner, it will follow the optimal partner f with the food concentration Fmax and move closer to f. If F /n > F, then there is a higher food concentration at Fmax and its surroundings are not crowded, and the fish advances one step towards f. Otherwise, the pray behaviour is executed.
The update formula for the follow behaviour can be expressed as:
where
f is the position coordinate of the partner with the optimal state.
3.2.4. Improved Investigation Behaviour
Although AFSA has a fast convergence in the initial optimization stage, it is easy to fall into a local optimum. Concerning this problem, this paper introduces a detection mechanism of the ABC algorithm into the AFSA [
33,
34,
35]. In the fish population, the fish with the poorest fitness value is defined as the detecting fish, and its position is reassigned to realize the re-optimal search in the search space. The random behaviour of the AFSA is replaced by the detection behaviour, and the higher local optimization ability of the ABC detection mechanism is used to make up for the shortages of the AFSA. As a result, the fish swarm can accelerate the convergence in the optimization process, are better able to jump out of the local optimum, and avoid the premature problem. The calculation formula for the investigation behaviour is:
where
f is the coordinate of the corresponding fish in the bulletin board.
3.3. Flow of the IAFSA
As is shown in
Figure 5, the main steps for locating the PD using the IAFSA are as follows:
Step 1: Coordinated values and arrival delay of the four sensors are input;
Step 2: The initialization parameters, including the maximum number of iterations K, the population size N, the initial position of each fish (the coordinate value of the PD source), the initial vision field Visual, the initial step length Step, the crowding factor , and the number of repetitions trynumber are set;
Step 3: The fitness value of each individual of the initial fish swarm is calculated, and the optimal fitness value in the bulletin board is recorded;
Step 4: The adaptive Visual and Step is calculated according to the number of iterations;
Step 5: The swarm and follow behaviours are executed; furthermore, the pray or investigation behaviours are performed according to the food concentration condition;
Step 6: The fitness values of the pray, follow, investigation and swarm behaviour are compared with the fitness values of the bulletin board to replace or retain the fitness values of the bulletin board;
Step 7: The iteration according to K or the convergence condition are stopped or repeated;
Step 8: The position coordinates of the PD source are output.
5. IAFSA for Simulation in the PD Location
To verify the practical effect of the IAFSA, a series of tests on the PD location were carried out on a 220 kV three-phase double-winding oil-immersed transformer by referring to the test data in [
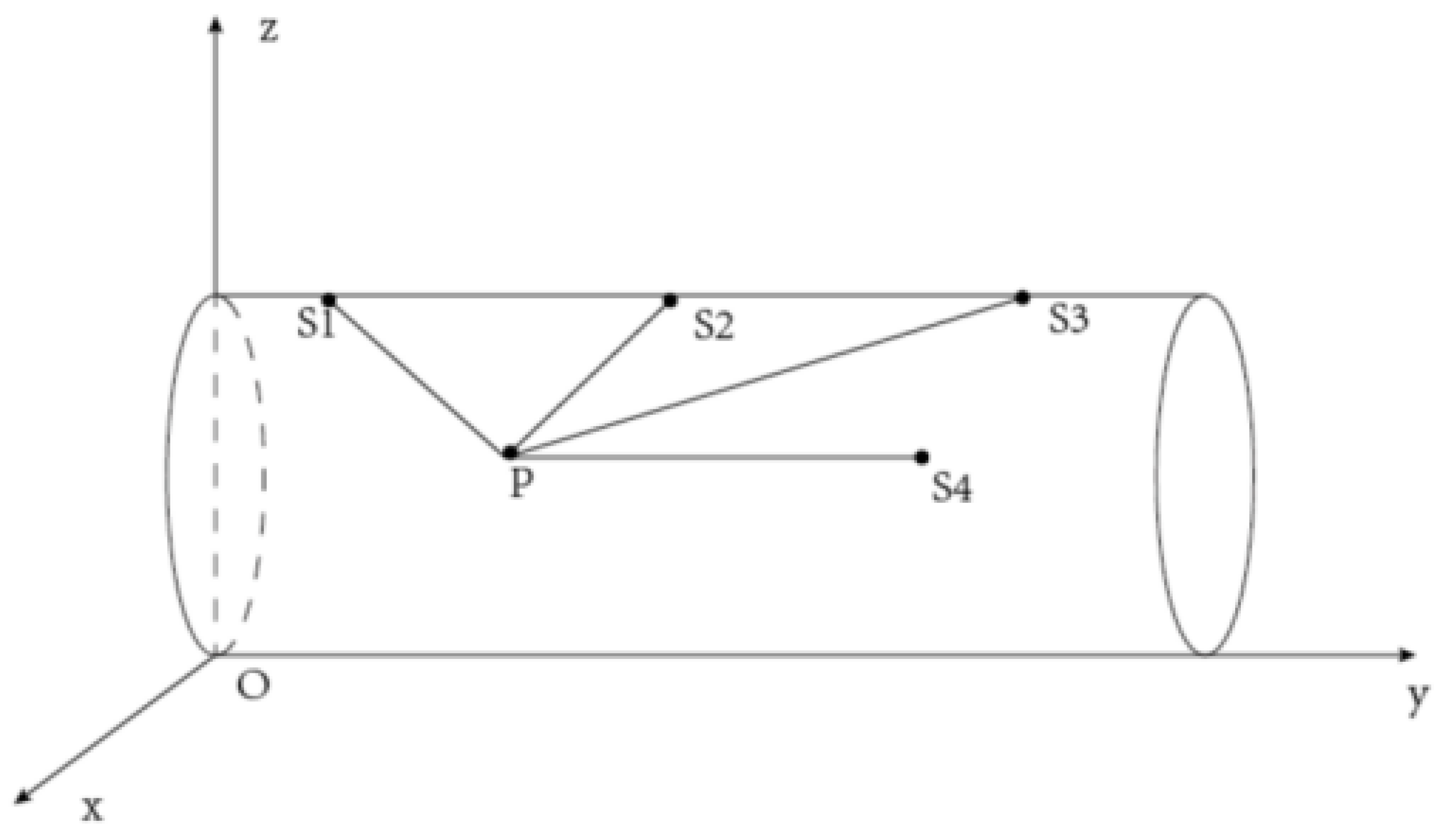
37]. As show in
Figure 7, the dimensions of the transformer are: 5000 × 2500 × 3000 mm. The coordinates of the four sensors are
S (3530,200,1620),
S (1080,200,680),
S (2310,200,430), and
S (4340,200,680), with the coordinate unit in mm. The positions
P of the PD sourced are shown in
Table 3:
The main parameters of PSO, AFSA and IAFSA are shown in
Table 4.
If
P (
x,y,z) and
P (
x,y,z) are respectively represent the actual and calculated positions of the PD source, the distance error
is defined as
In order to more clearly evaluate the performance of the positioning algorithm, this paper uses relative error as the evaluation index. The relative error refers to the difference between the actual positioning result and the furthest true position, calculated with the furthest true position as the reference. The specific calculation formula is as follows:
where
D is the distance between the two furthest points.
The smaller the relative error, the more accurate the positioning result. In practical applications, a relative error of less than 5% is considered a desirable positioning effect. By analysing and comparing the experimental data, the performance of different positioning algorithms can be evaluated, providing references for practical applications.
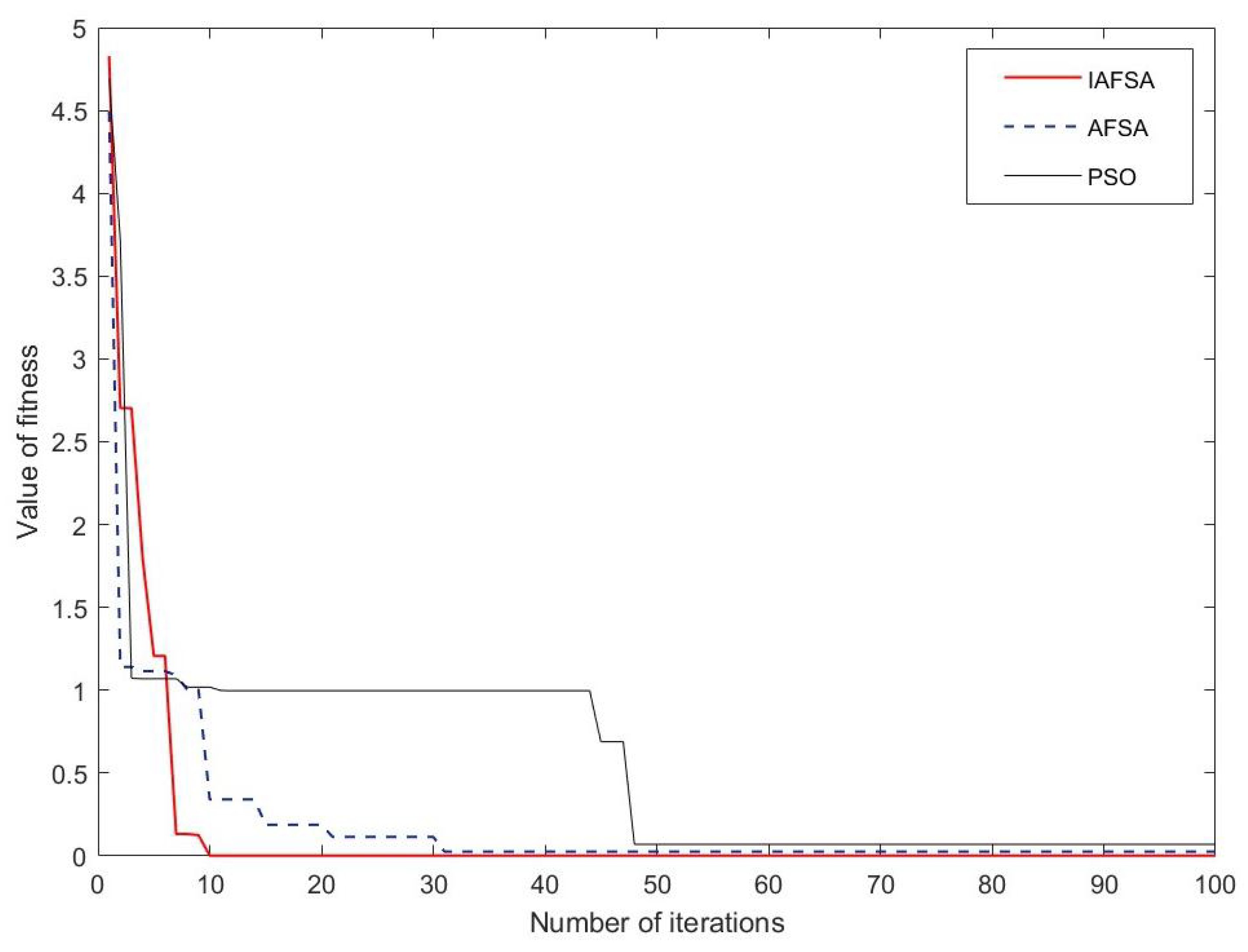
Through a series of simulated field tests, some conclusions could be achieved as follows:
The localization results of the IAFSA are global with location errors significantly less than the AFSA and PSO, as well as slightly less than the complex domain Newton iteration-grid search method (CDNIGS). Meanwhile, the localization results of the PSO, AFSA, and CDNIGS often fall into local optima, leading to abrupt extremum and decreased positioning accuracy. However, the IAFSA has a relative error less than 1.6% and avoids falling into the local optimum. Obviously, the IAFSA has better location result stability.
Influence of Different Time Delay Errors
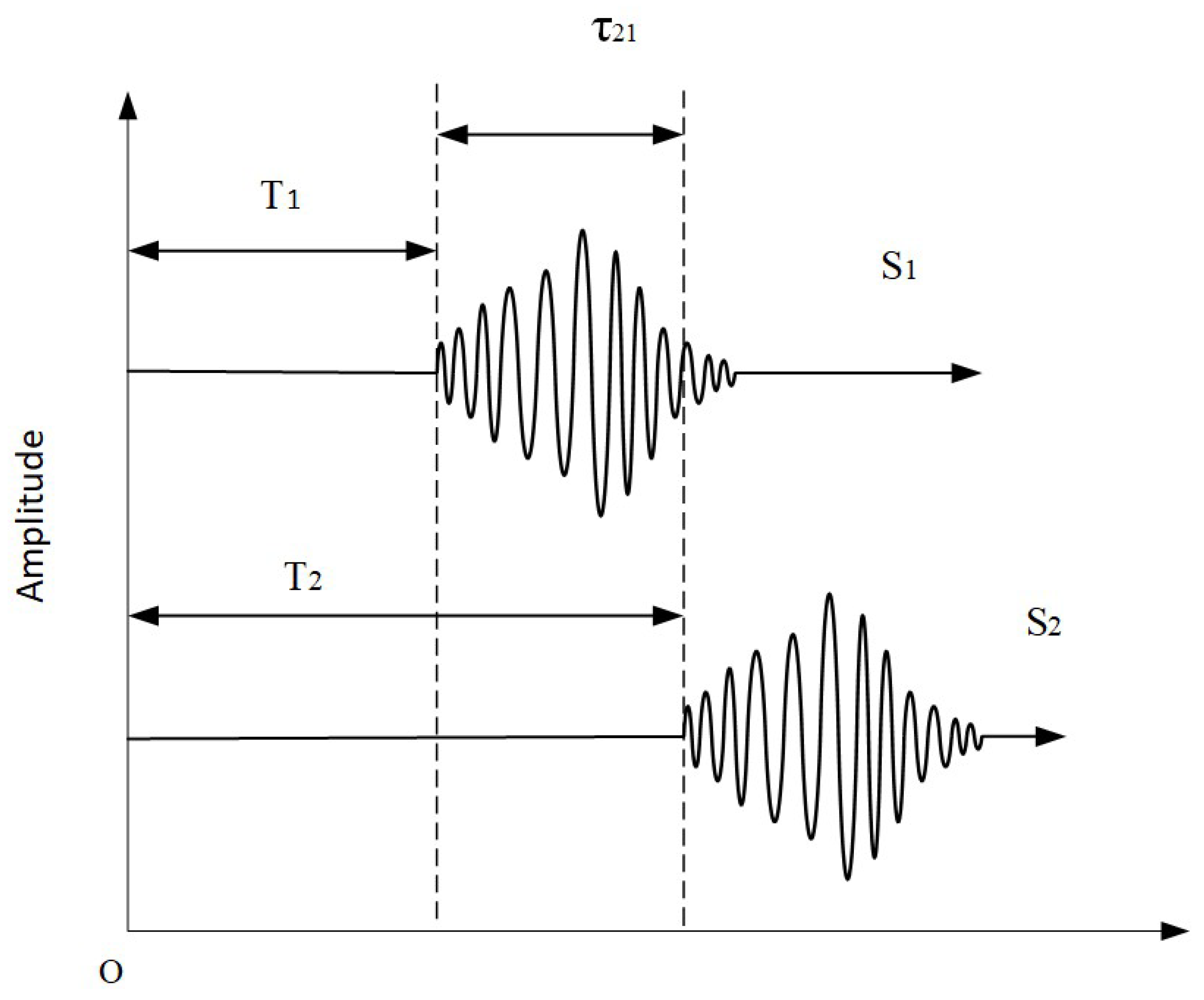
The theoretical delay
of the discharge signal reaching each sensor can be calculated based on the coordinates of each sensor and PD power source, and the speed of electromagnetic waves
c, while the measured delay
can be calculated according to the starting time of the first wave. Then the delay measurement error Δ
τ can be calculated as:
According to Equation (
15), the experimental data of PD source No.5 in
Table 5 was selected to calculate the theoretical delay.
Furthermore, the delay errors are artificially added into the theoretical delay to study the influence of different delay errors on the location results. Specific simulation results are shown in
Table 6:
From
Table 6, when
= 0 ns, the relative location errors of the three algorithms are all within 1%, and that of the IAFSA is 0.2%. When
= 0.2 ns, the relative error of the IAFSA becomes 0.5%. Although the location accuracy of the PSO and AFSA is not as high as that of the IAFSA, their relative errors are still less than 1.3%. When
= 0.4 ns, the PSO and AFSA fall into the local optimum, and the relative error of the IAFSA is 0.6%. When 0.6 ns <
< 0.8 ns, the PSO and AFSA are trapped in the local optimum with relative errors greater than 4.5%, and exceeds 5% when
= 1 ns. However the maximum relative error of the IAFSA is no more than 1.3%.
With an increase in the delay error, the relative error of the three algorithms also increases. The location results of the PSO and AFSA both show extreme values, but the relative location error of the IAFSA always remains below 1.3%, and there is no extreme value. The delay error partially impacts the location accuracy of the IAFSA. However, within of 1 ns, the IAFSA shows strong robustness, and performs better than the PSO and AFSA in location accuracy.
7. Conclusions
The traditional AFSA has the disadvantages of a slow convergence speed and can easy fall into a local optimum in the late stage; therefore, the optimal solution cannot meet the actual engineering requirements when the AFSA is applied in PD localization. In this paper, a 3D TDOA localization algorithm based on the IAFSA is proposed. Firstly, the detection behaviour of the ABC is introduced into the AFSA, improving its ability to jump out of local extremum and global search, overcoming the premature phenomenon. Secondly, the adaptive vision field and step length are adopted. In the early stage of the search, the search-ability of the global optimal solution and convergence speed are improved by increasing the vision field and step length. In the middle stage, the vision field and step length are gradually reduced to find the local optimal solution. In the late stage, the vision field and step length are reduced to a minimum, and the search focuses in the remaining small area with greatly improved optimization accuracy. Finally, the IAFSA is applied to PD localization. Simulation and field experiment results show that the IAFSA has a better localization performance than the AFSA or PSO.
Compared with popular algorithms such as neural networks and deep learning, the IAFSA does not require a large amount of data to train the model; it does not require powerful computing resources to run, unlike neural networks and deep learning; and it has low hardware requirements, running on portable devices such as embedded systems making it highly practical. Regarding future research directions, one potential avenue is the use of high-speed AD acquisition chips to replace oscilloscopes and store acquired data on embedded platforms, such as FPGAs. Another possibility is to combine the positioning system with a smart inspection robot for GIS substations using 5G communication, in order to achieve fully automated and intelligent localization of partial discharge sources in substations.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}