
Research on Harmonic Management of Single-Phase AC Charging Pile Based on Active Filtering

Abstract
1. Introduction
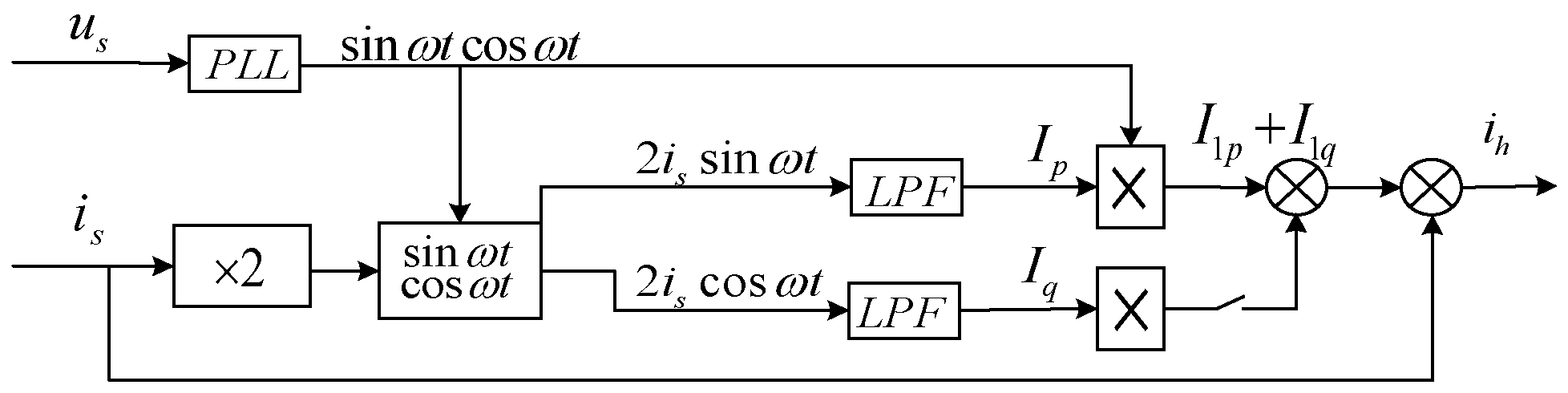
2. Harmonic Detection Method Combining LMS/LMF Adaptive Algorithm
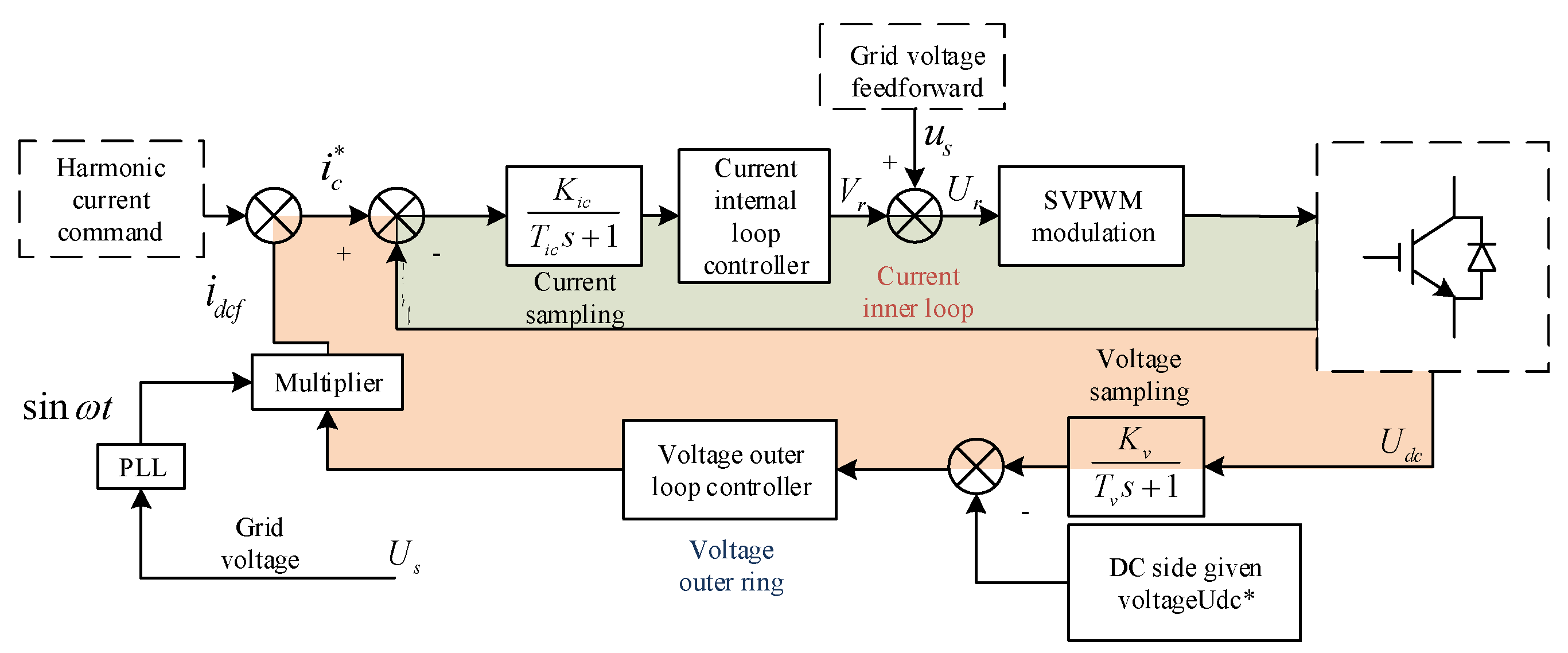
3. Single-Phase PAPF Composite Control Strategy
3.1. Repetition Control Principle
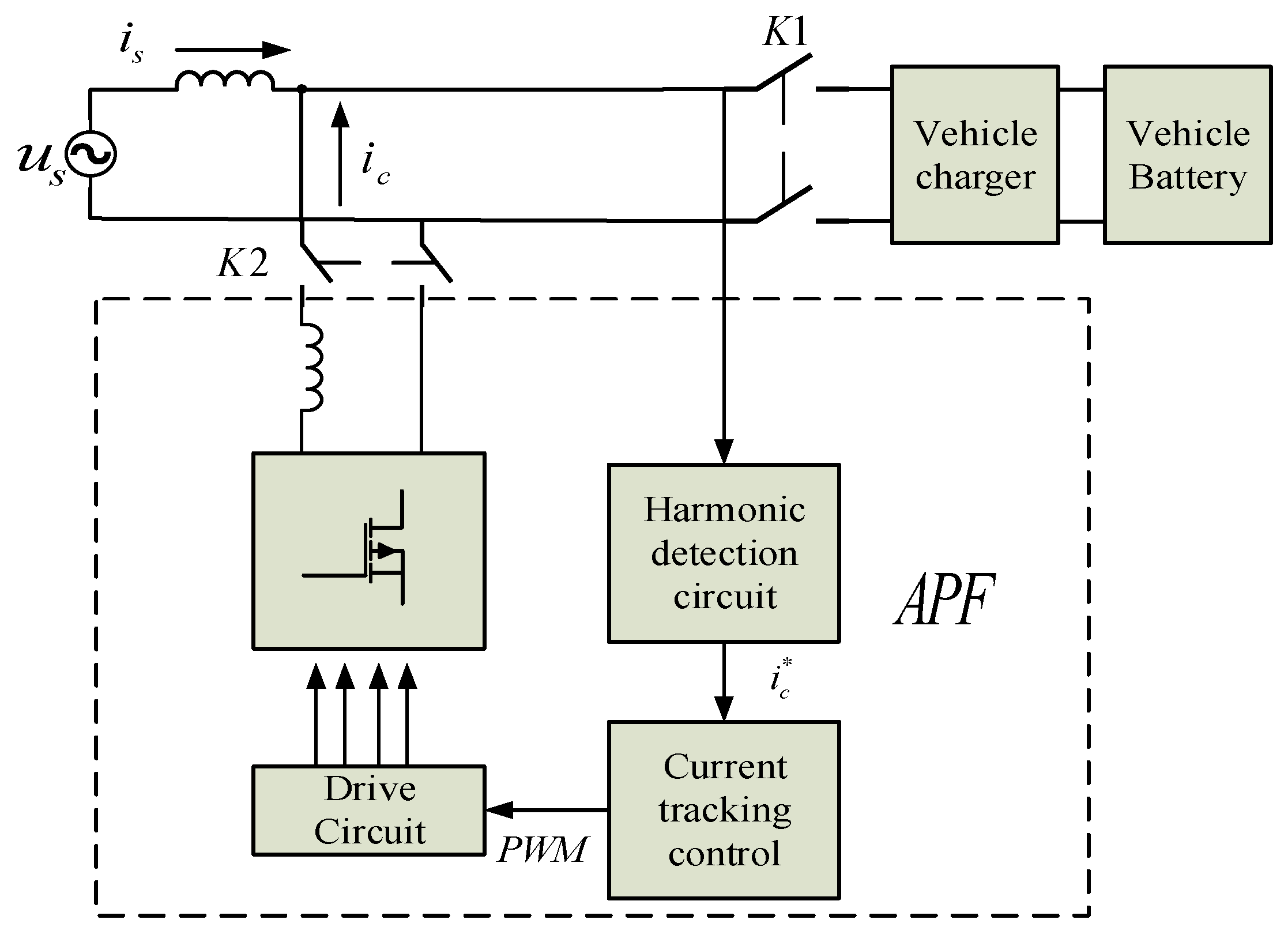
3.2. Filter System Working Principle and Compound Control Strategy
4. Harmonic Detection Simulation and Prototype Experiment
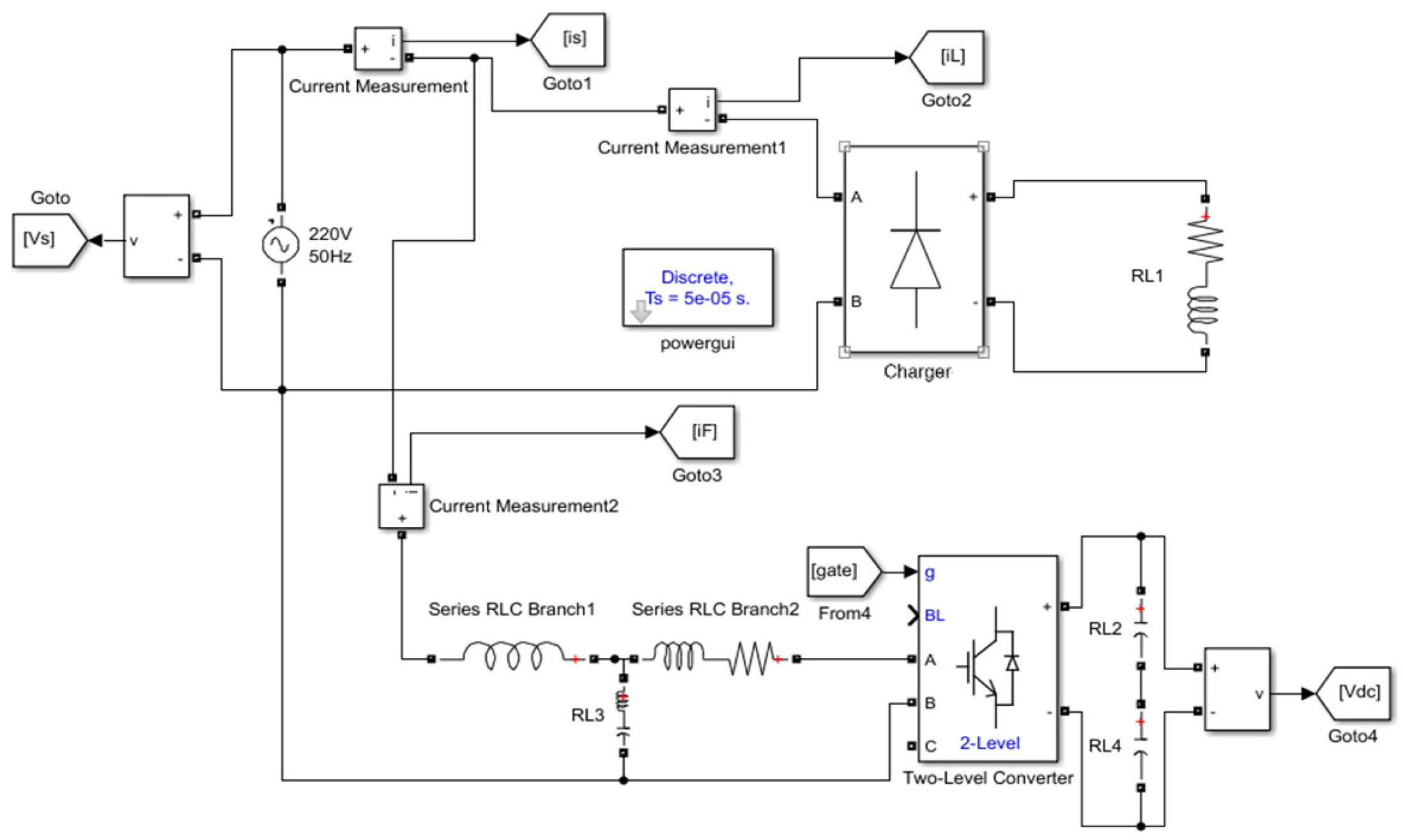
5. Simulation of Composite Control System for Single-Phase PAPF System
6. Conclusions
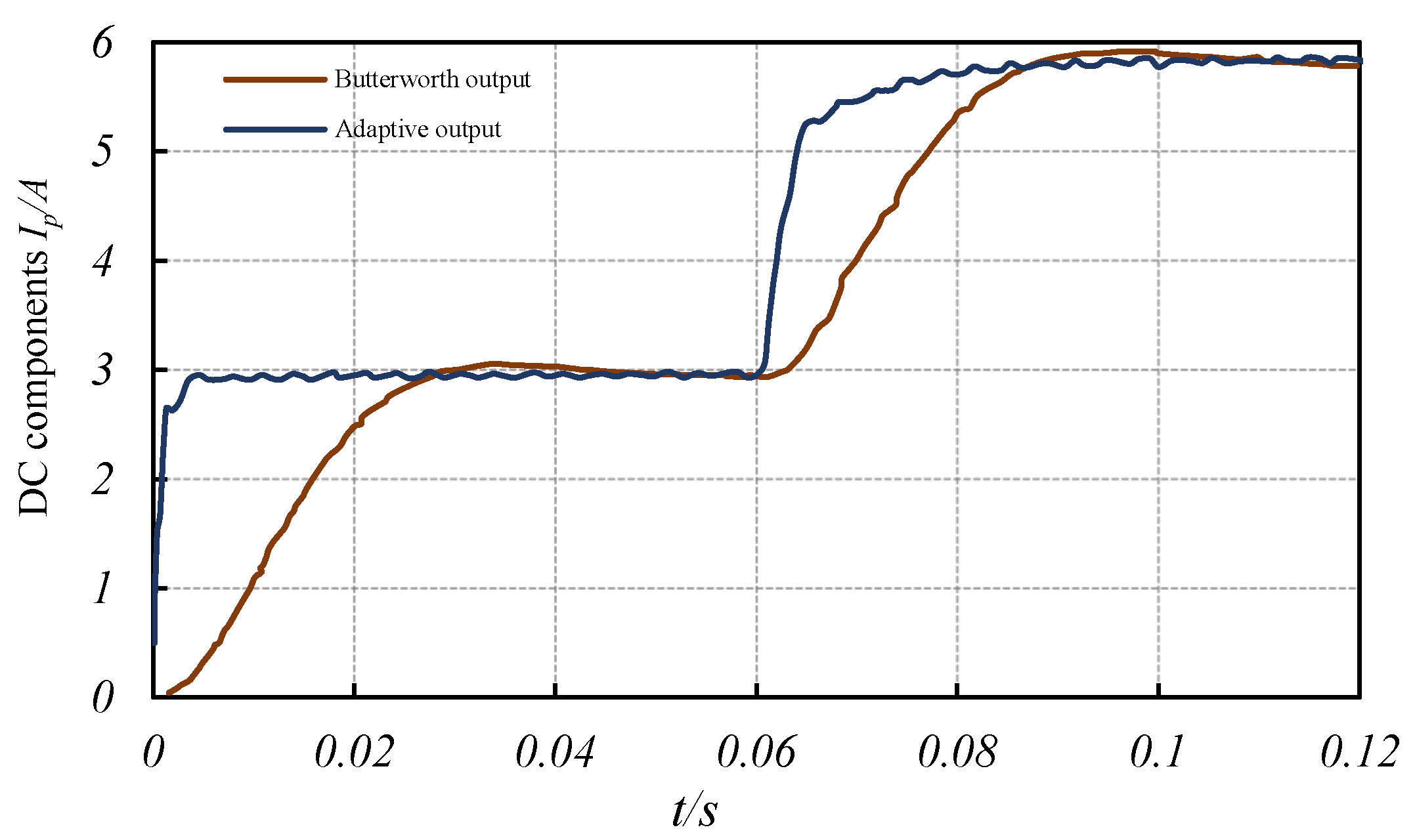
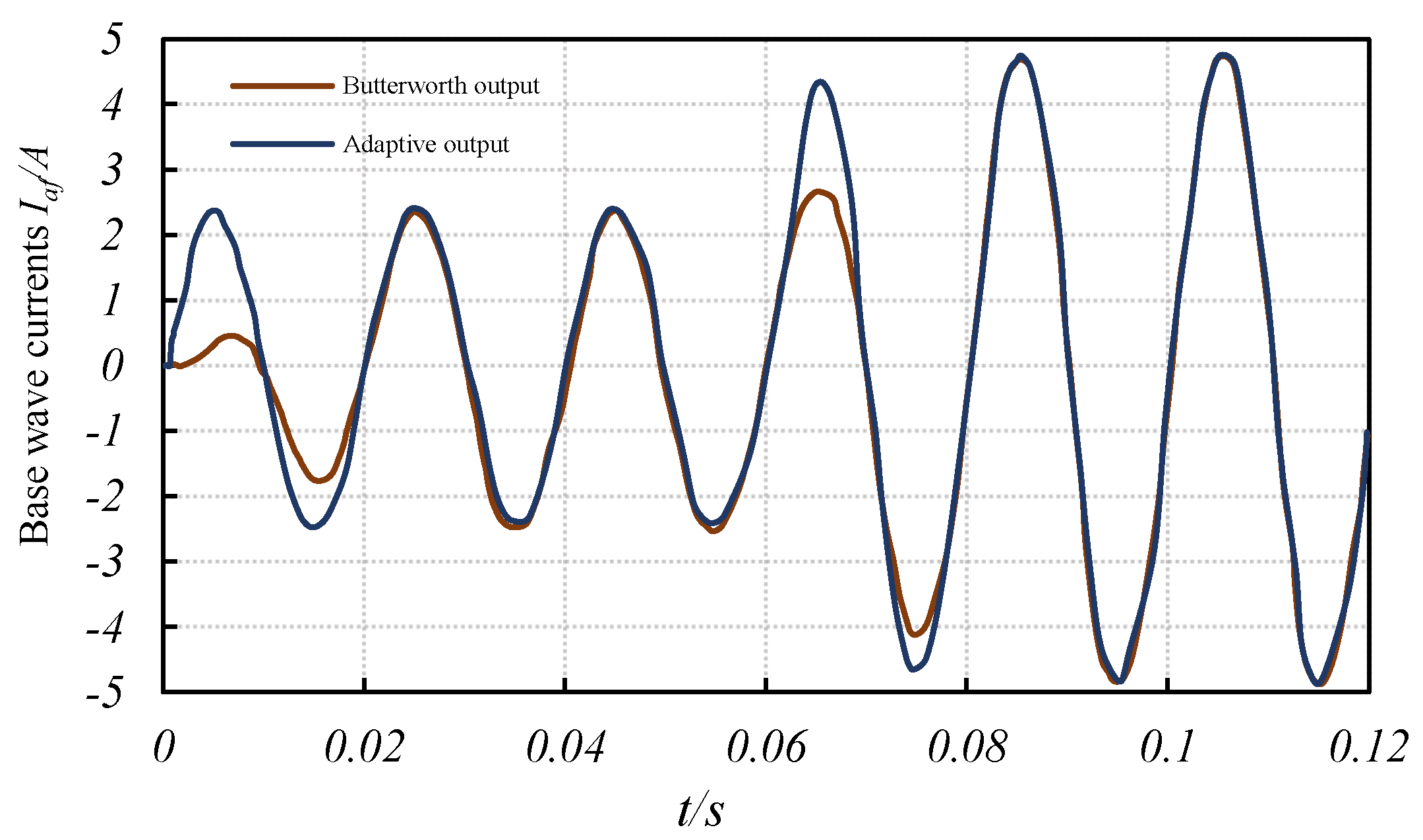
- The hybrid adaptive filtering algorithm can adjust the proportion of LMS and LMF algorithms in the system weights according to the error changes and reasonably take into account the advantages of each algorithm. The improved method not only ensured the accuracy of harmonic detection, but also increased the response speed by 0.04 s, which improved the harmonic detection performance.
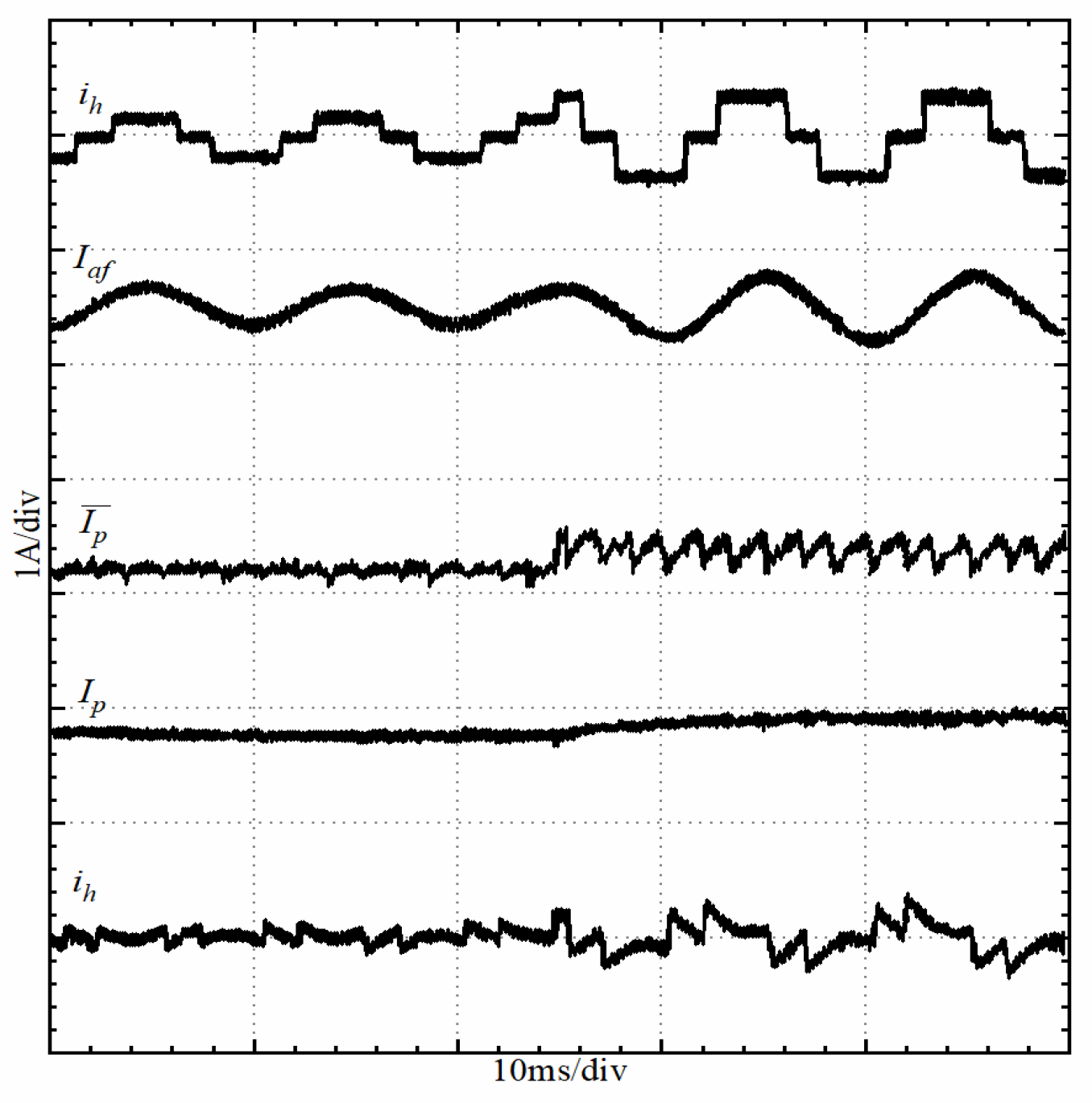
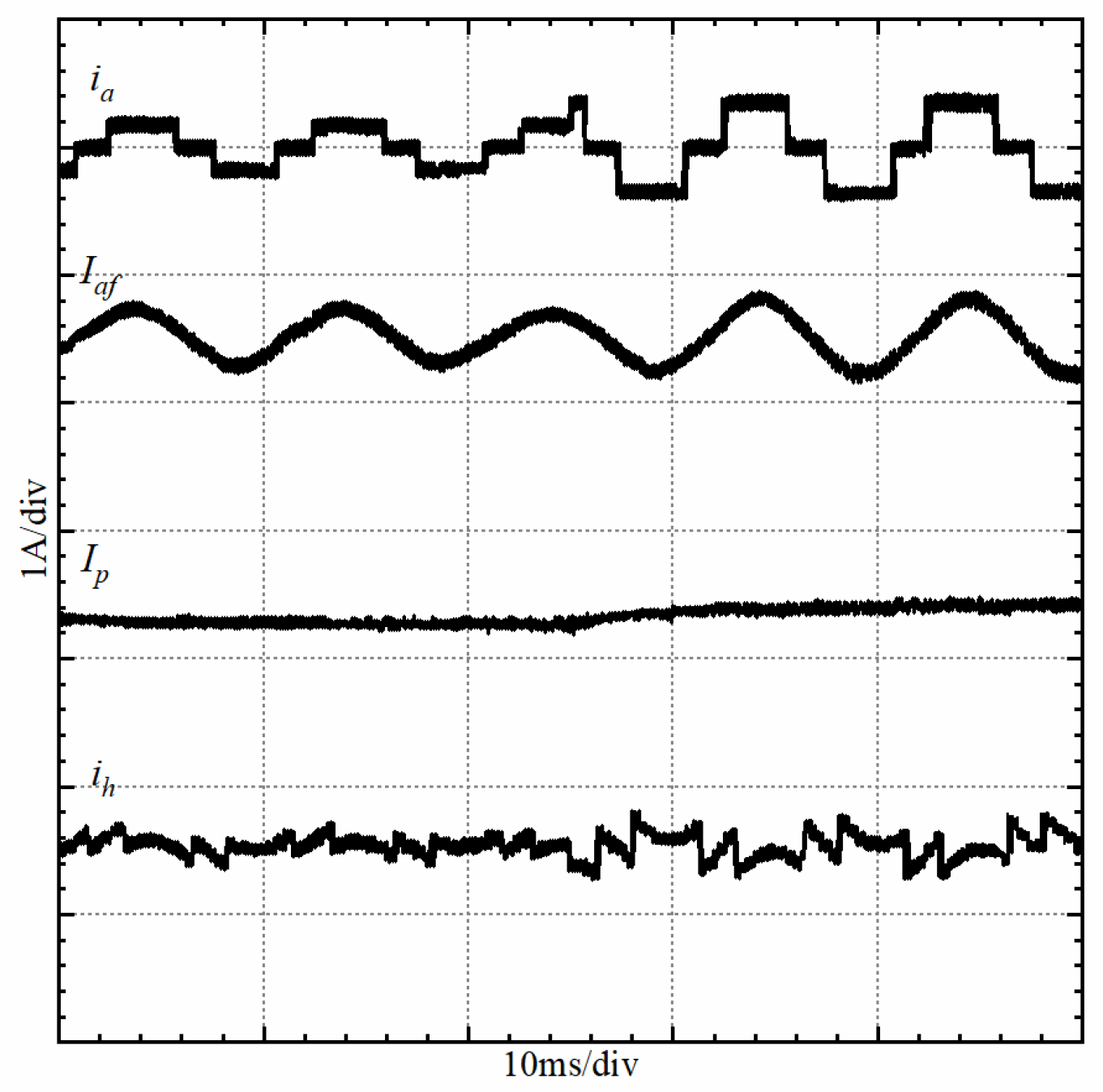
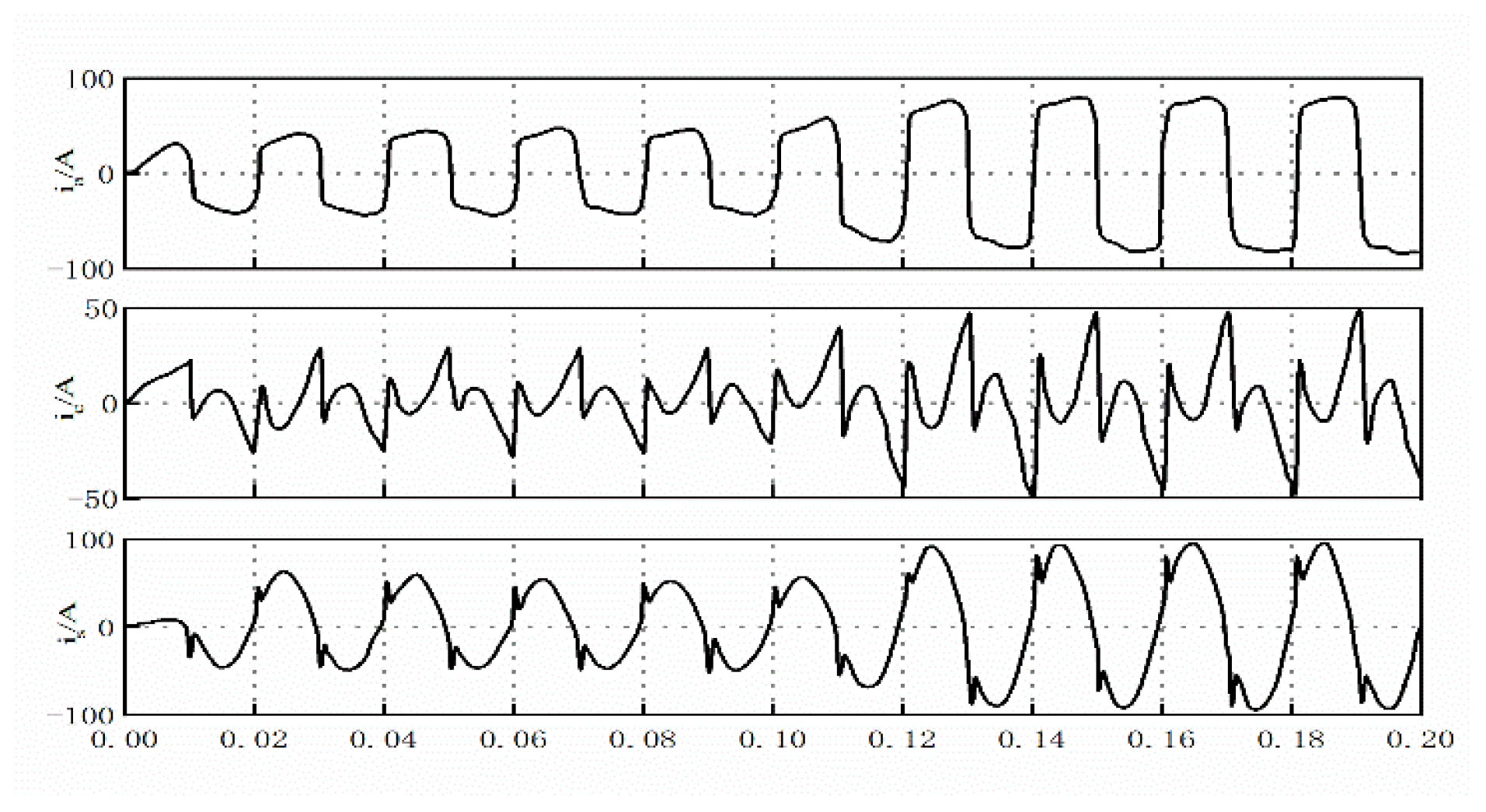
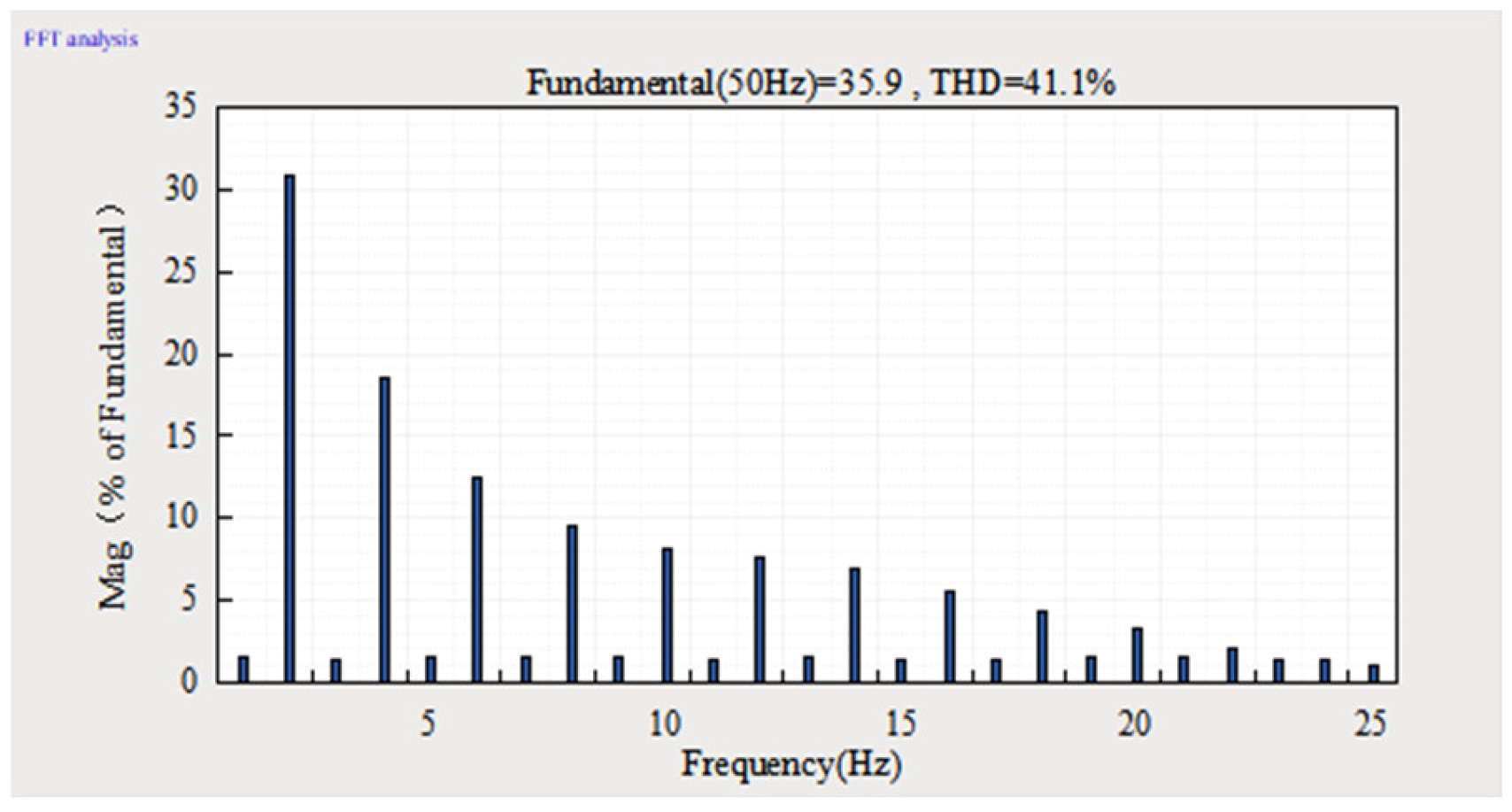
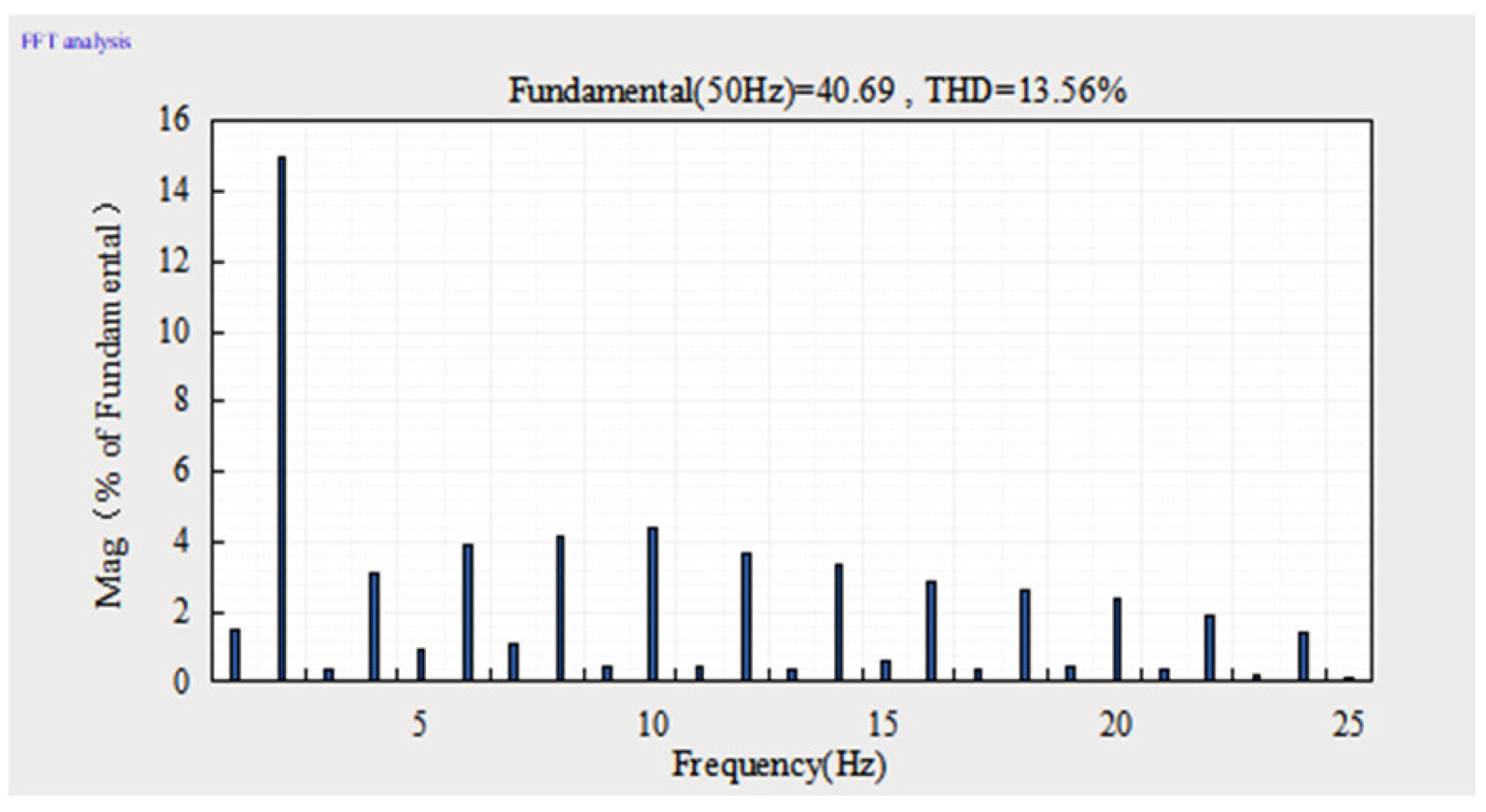
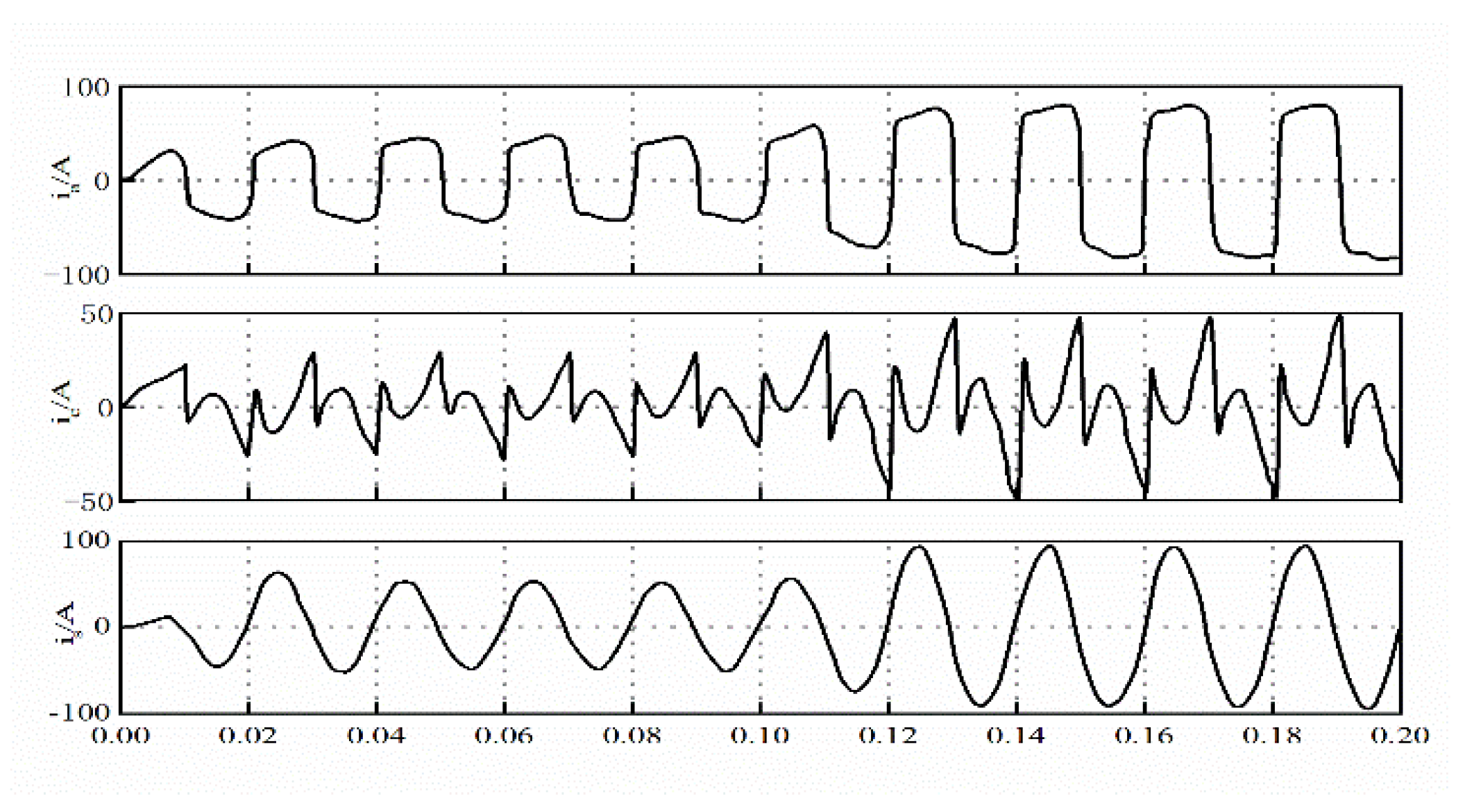
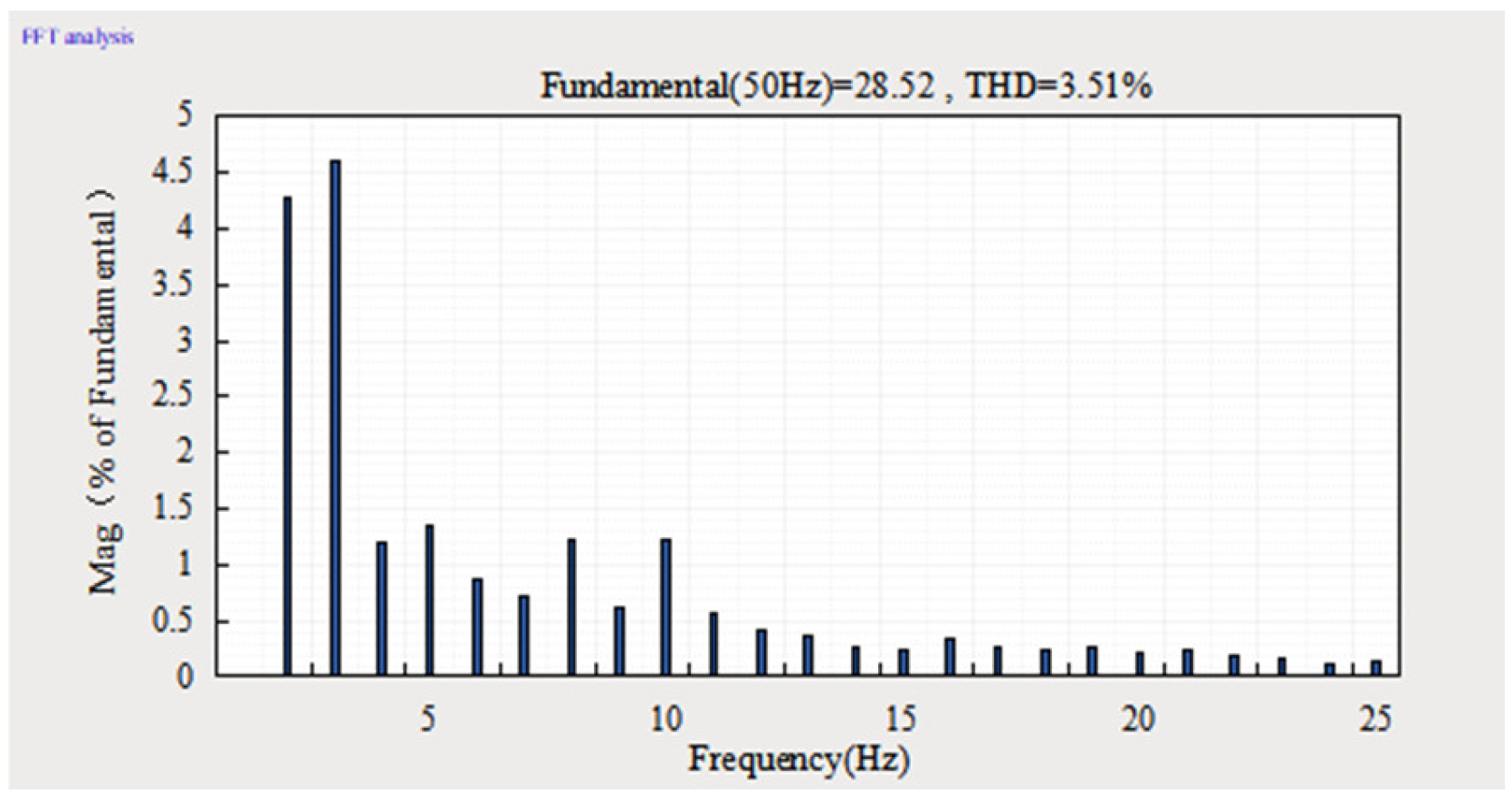
- Compound control was used to complete the harmonic compensation and compare the compensation results. The grid current waveform curve was more rounded, and the system had obvious tracking in the first cycle of sudden load change and entered the steady state in the third cycle. After compensation, the harmonic content of the power grid current was reduced to below 5%, which was in line with national standards. The above results showed that the system has good dynamic response capability and better harmonic compensation performance.
- Although the single PAPF system studied in this paper achieved good compensation, there are still some aspects that can be improved and are areas where future research can be initiated. The single harmonic detection technique used in this paper had the delay while performing the three-phase construction, which in practice was reflected in the extensive use of multipliers and the use of LPFs. In this paper, the LPF link had been improved but a single harmonic detection technique with better dynamic performance and detection accuracy can be designed without relying on the digital LPF in the future. In addition, although the combination of PI control and repetitive control had achieved relatively high dynamic and steady-state performance, further performance improvement and the use of other controllers with better dynamic performance instead of PI controllers are the focus of future research.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, X.G.; Xiang, T.C.; Li, C.P.; Bi, Y.X. A Novel Active Power Filter Method for Single-phase Rectifiers in Charging Systems for Electric Vehicles. Electr. Drive 2021, 51, 14–21. [Google Scholar]
- Zhang, Y.; Lu, J.Z.; Li, B. New electric vehicle AC charge spots using active power filter. High Volt. Eng. 2011, 37, 7. [Google Scholar]
- Wu, J.Z.; Mei, F.; Chen, C. Harmonic detection method in power system based on empirical wavelet transform. Power Syst. Prot. Control 2020, 48, 8. [Google Scholar]
- Zhang, W.C. Design of AC Charging Pile System for Electric Vehicle and Research on Active Filter. Ph.D. Thesis, Anhui University of Technology, Maanshan, China, 2019. [Google Scholar]
- Peng, J.W. Research on Unexpected Harmonic Current Suppression Strategy of Single-Phase Parallel APF. Ph.D. Thesis, Huazhong University of Science and Technology, Wuhan, China, 2019. [Google Scholar]
- Zhou, W.J. Research and Design of Photovoltaic Charging Pile Based on Internet. Ph.D. Thesis, Guangxi University, Nanning, China, 2021. [Google Scholar]
- Chen, D.; Qiu, Q.H.; Yang, X.D.; Wang, J.; Ping, H.E.; Jin, Y.Q.; Zhang, Y.B. Harmonic suppression methods for different types of electric vehicle charging stations. J. Mech. Electr. Eng. 2017, 34, 922–926. [Google Scholar]
- Lu, K.; Diao, Q. Analysis of active power filter applications in different networks. Power Syst. Prot. Control 2015, 43, 143–149. [Google Scholar]
- Li, N.; Huang, M. Analysis on harmonics caused by connecting different types of electric vehicle chargers with power network. Power Syst. Technol. 2011, 35, 170–174. [Google Scholar]
- Shi, H.; Gong, X.J.; Chi, G.S.P.; Zhang, J.J. Research on finite control set model predictive control strategy of three-level APF. J. Phys. Conf. Ser. 2021, 1748, 32001. [Google Scholar] [CrossRef]
- Soomro, D.M.; Alswed, S.K.; Abdullah, M.N.; Radzi, N.H.b.M.; Baloch, M.H. Optimal design of a single-phase APF based on PQ theory. Int. J. Power Electron. Drive Syst. 2020, 11, 1360. [Google Scholar] [CrossRef]
- Wei, X.; Li, C.; Qi, M.; Luo, B.; Deng, X.; Zhu, G. Research on Harmonic Current Amplification Effect of Parallel APF Compensating Voltage Source Nonlinear Load. Energies 2019, 12, 3070. [Google Scholar] [CrossRef]
- Liu, S.Y. Design of Active Power Factor Correction and Control System for Charging Pile of Electric Vehicle. Ph.D. Thesis, Harbin University of Technology, Harbin, China, 2021. [Google Scholar]
- Shao, Z.G.; Xu, H.B.; Xiao, S.Y. Harmonic problems in a new energy power grid. Power Syst. Prot. Control 2021, 49, 178–187. [Google Scholar]
- Chen, Z.L. Research on Harmonic Current Detection and Tracking Control of Active Power Filter. Ph.D. Thesis, Jiangsu University, Zhenjiang, China, 2013. [Google Scholar]
- Li, G.; Ding, L. Design of simulation test platform for charging pile control system. J. Phys. Conf. Ser. 2020, 1550, 62004. [Google Scholar] [CrossRef]
- Xu, J.C.; Liu, X.; Shi, H.; He, W.S. Research of monitor system of electric vehicle charging pile based on ARM-Linux. Appl. Mech. Mater. 2012, 241–244, 2258–2262. [Google Scholar] [CrossRef]
- Caro, L.M.; Ramos, G.; Rauma, K.; Rodriguez, D.F.C.; Martinez, D.M.; Rehtanz, C. State of Charge Influence on the Harmonic Distortion from Electric Vehicle Charging. IEEE Trans. Ind. Appl. 2021, 57, 2077–2088. [Google Scholar] [CrossRef]
- Lucas, A.; Bonavitacola, F.; Kotsakis, E.; Fulli, G. Grid harmonic impact of multiple electric vehicle fast charging. Electr. Power Syst. Res. 2015, 127, 13–21. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Numerical Value |
|---|---|
| Voltage value | 220 V/50 Hz |
| Load resistance | 136 |
| Load inductance | 30 mH |
| Load Surge Resistance | 68 |
| Load Sudden Change Inductance | 15 mH |
| Parameters | Numerical Value |
|---|---|
| Grid voltage value | 220 V/50 Hz |
| Filter Capacitor | 36 μF |
| DC side capacitance | 3000 μF |
| Filter Inductors | 0.315 mH |
| Grid-side inductance | 0.104 mH |
| Modulation method | SVPWM |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, X.; Shi, H.; Wang, Y.; Zhuang, Y.; Yuan, G.; Zhu, S. Research on Harmonic Management of Single-Phase AC Charging Pile Based on Active Filtering. Energies 2023, 16, 2817. https://doi.org/10.3390/en16062817
Ding X, Shi H, Wang Y, Zhuang Y, Yuan G, Zhu S. Research on Harmonic Management of Single-Phase AC Charging Pile Based on Active Filtering. Energies. 2023; 16(6):2817. https://doi.org/10.3390/en16062817
Chicago/Turabian StyleDing, Xiangfu, Haojie Shi, Yingjian Wang, Yong Zhuang, Guangming Yuan, and Shuzhen Zhu. 2023. "Research on Harmonic Management of Single-Phase AC Charging Pile Based on Active Filtering" Energies 16, no. 6: 2817. https://doi.org/10.3390/en16062817
APA StyleDing, X., Shi, H., Wang, Y., Zhuang, Y., Yuan, G., & Zhu, S. (2023). Research on Harmonic Management of Single-Phase AC Charging Pile Based on Active Filtering. Energies, 16(6), 2817. https://doi.org/10.3390/en16062817