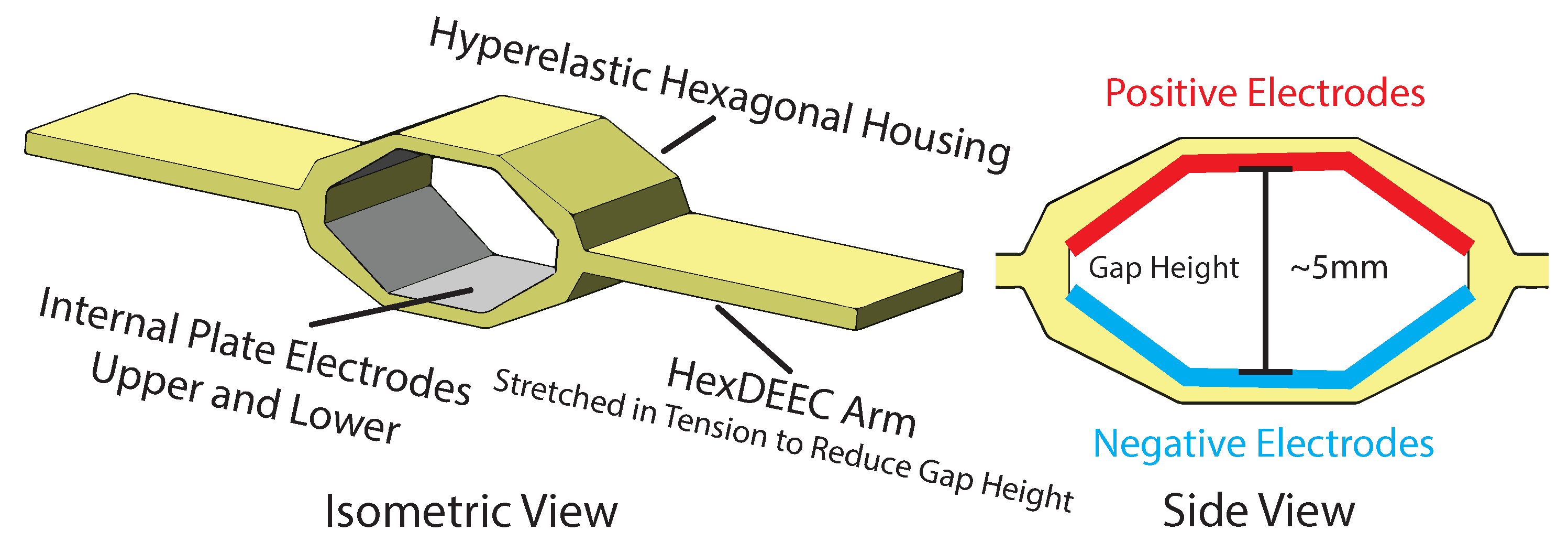
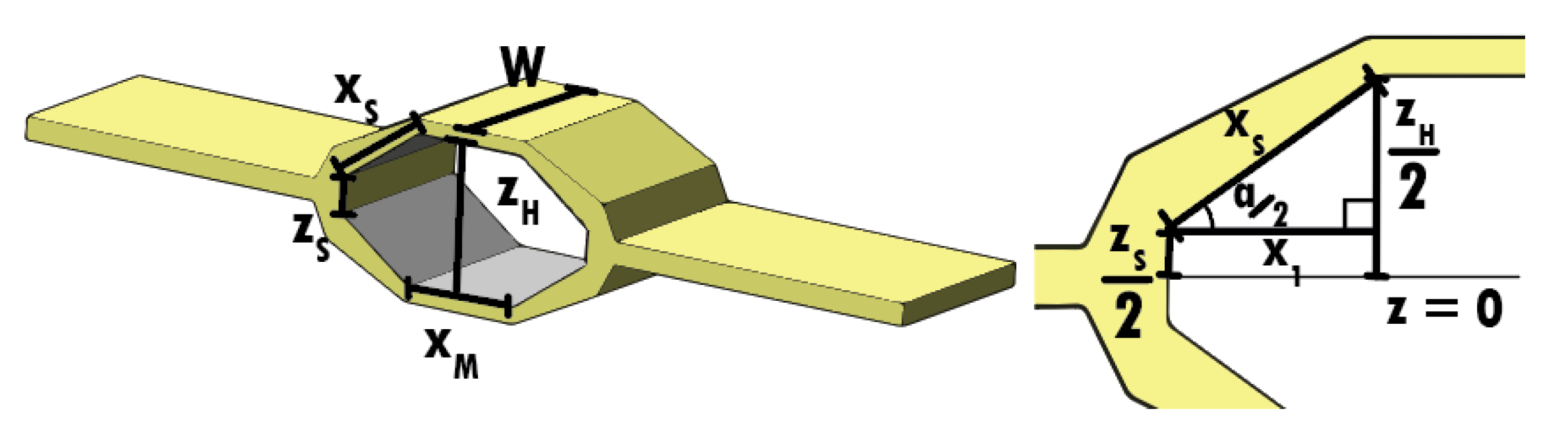
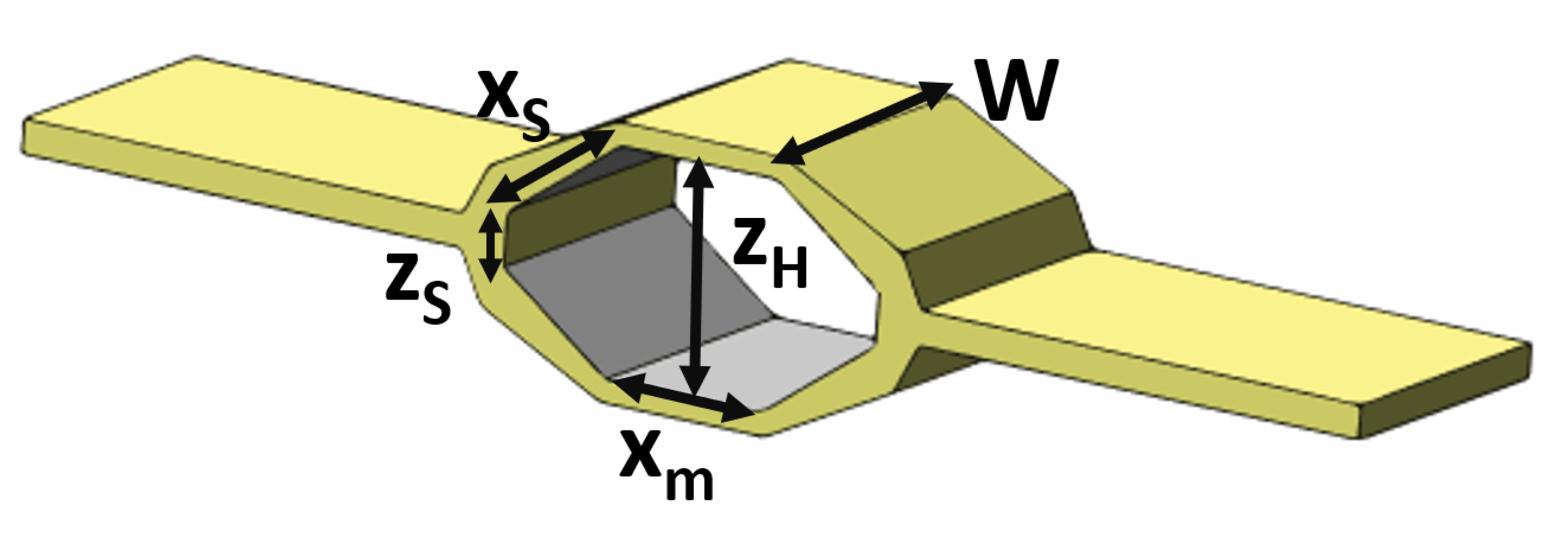
The resulting hexDEEC model involved ramping loading on both ends of the device while recording the changes in the five length parameters that can be used to find the resulting capacitance and electric attracting force between the plates: the width (
W), slanted length (
), middle length (
), middle gap height (
), and side gap height (
) (see
Figure 5 and
Section 2.1.1). An additional benefit to using STARCCM+ is the ability to create custom functions, which enable the simulation to track the values of the variables, apply them to the capacitance, energy, and electric force equations, change the electric force loading as the simulation was processing, and enable ramped loading. The five length variables were recorded in STARCCM+ by using two point probes at the ends of each length with changing x, y, and z positions that were recorded as the hexDEEC underwent variable loading from 0 to 5 N on both sides, increasing by 0.5 N for each second of loading. The positions of these probes were then converted into the desired length variables, which were then applied to the custom equations for capacitance, energy, and electric force.
Generally, the STAR-CCM+ simulations required using the hyperelastic and nearly incompressible material models are described in
Section 2.2. Additionally, since all the simulations considered the solid mechanics of these hyperelastic objects, it was necessary to include the solid stress and nonlinear geometry models. The solid stress solver, incorporated into the simulation from the solid stress model, was a sparse direct solver. Since the geometry was nonlinear the equations for the static and dynamic problems were also nonlinear and the solution required updating the stiffness matrix. In this case, the solid stress solver factorized the stiffness matrix every time the matrix was updated based on the full Newton iteration method [
26]. As described in
Section 2.3.2 and
Section 2.3.4 it was also necessary to include the solid stress load step solver for simulating the mechanics of the bubble and the hexDEEC. This solver enabled the external loads to be applied more gradually and is typically suitable for simulations with large nonlinearities [
26]. Since ramped loading was used in the simulation, STAR-CCM+’s implicit unsteady solver was required. This solver used first-order discretization, which set the integration method of the solid stress solver to backward Euler [
26].
2.3.1. Validation of Numerical Methods: Uniaxial Tensile Simulations
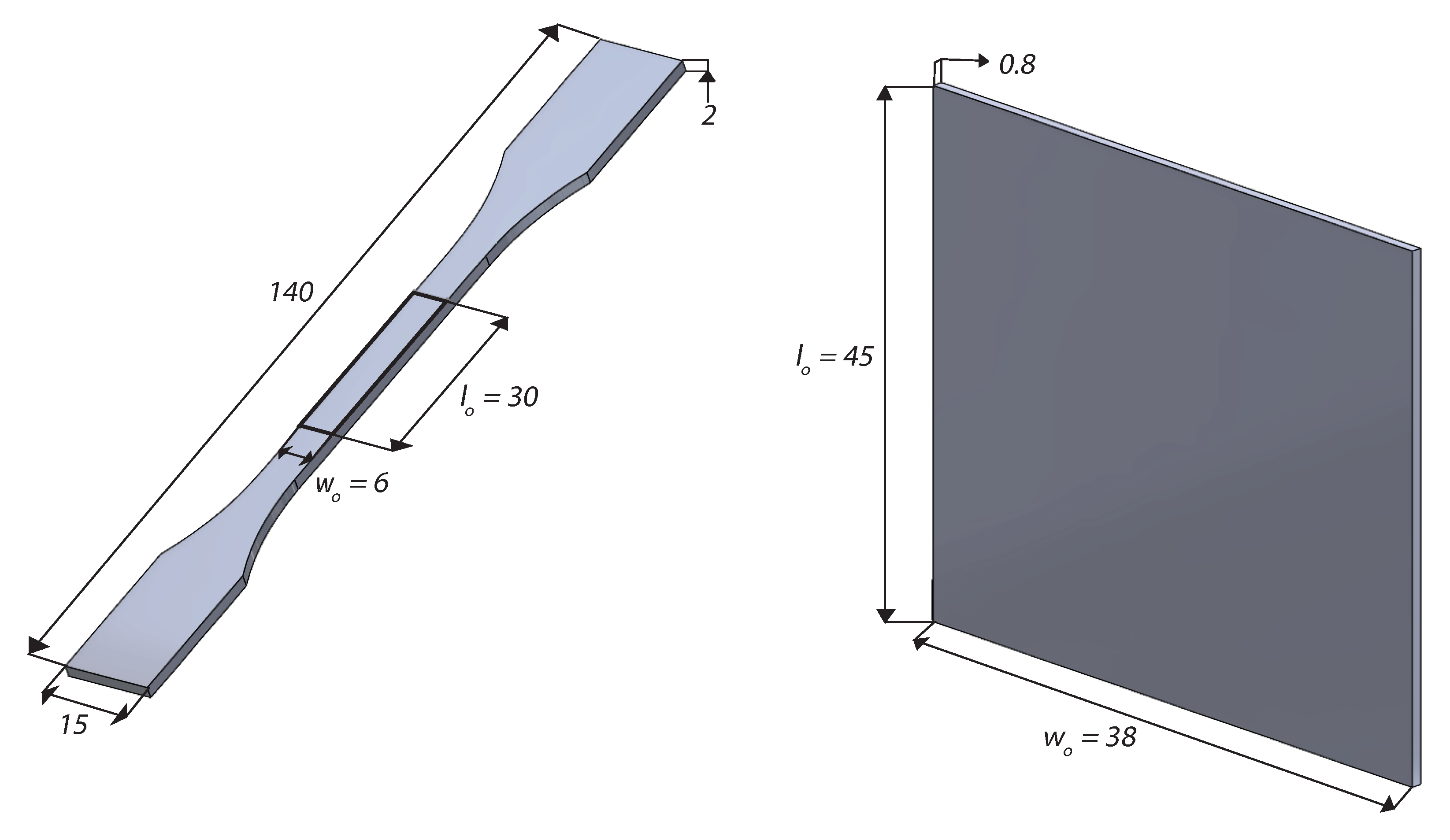
To verify the accuracy of the numerical analysis for the hexDEEC, STAR-CCM+ was used to recreate the uniaxial tensile simulations for the “dumbbell” shape and flat strip shape, in addition to the biaxial tensile bubble inflation simulations done by Viljoen, which are described further in
Section 2.3.2 [
22]. For these simulations the dimensions of the parts were matched to those of Viljoen’s simulations and the experimental work shown in
Figure 6. In Viljoen’s experimental work, Smooth-Sil 950 silicone rubber was molded into these shapes, which were then uniaxially loaded in a 1 kN load cell at a strain rate of 100 mm/min. The engineering stress
and stretch
in the
y-direction, parameters often used to describe the mechanics of hyperelastic materials, were calculated via the following equations:
and
where
is the force measured by a load cell in the
y-direction,
and
are the initial gauge width and thickness of the sample, respectively,
l is the gauge length of the sample at the instant of data acquisition, and
is the initial gauge length of the sample [
22].
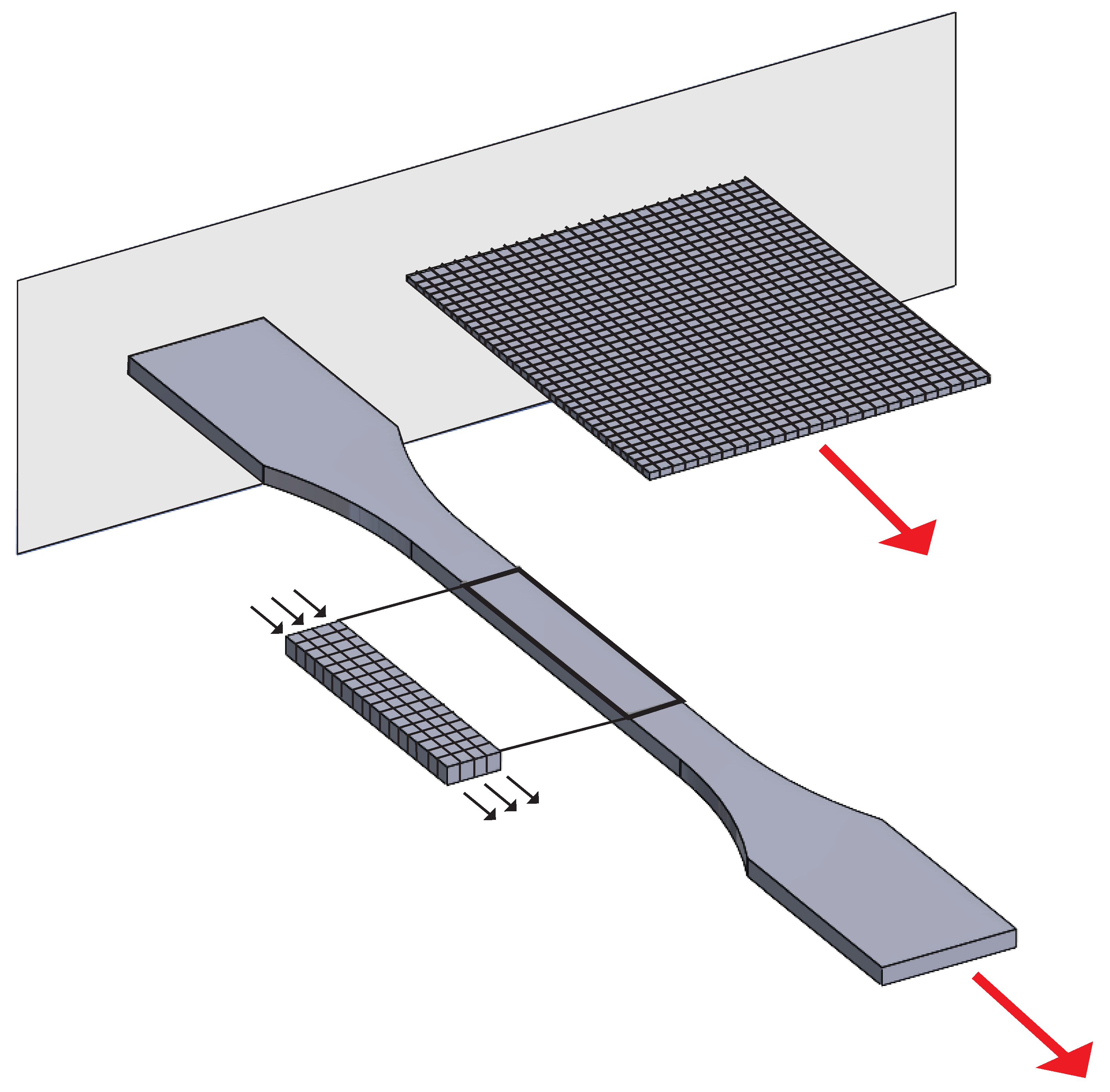
For the simulations of these samples, Viljoen used a mesh of 1710 Quad-4 elements for the rectangular flat strip and 60 Quad-4 elements for the gauge area of the dumbbell, defined initially as
. A smaller mesh was used to reduce errors at the boundaries in the experimental data. The rectangular flat strip’s boundary conditions included applying an edge load on one face, being fully constrained on the face opposite to the face receiving the tensile load, and being constrained against any movement perpendicular to the direction of the applied load, as shown in
Figure 7. The dumbbell gauge area’s constraints included nonzero prescribed displacements in the direction of the applied load for the top and bottom five nodes and a zero displacement constraint for movements perpendicular to the direction of the load for the middle node in the top and bottom, as shown in
Figure 7. These nonzero displacements were based on the empirical data recorded by Viljoen [
22].
In their analysis, Viljoen used the empirical data to determine the relevant material constants for the three-parameter Mooney–Rivlin model via direct and indirect identification methods such as least-squares fit. The material constants determined via Viljoen’s direct method with positive constant constraints were used for this analysis (
Table 1).
To recreate the results of these uniaxial tensile tests, parts were made in SolidWorks Version 2020 according to the dimensions specified in
Figure 6 and uploaded into STAR-CCM+ as Parasolid CAD files. The models selected in STAR-CCM+ included implicit unsteady, nearly incompressible material, nonlinear geometry, solid, solid stress, and three-dimensional elements. Note that selecting the implicit unsteady and solid stress models in STAR-CCM+ included the implicit unsteady and solid stress solvers in the simulation. The material law was specified to include hyperelasticity and Mooney–Rivlin (five-term). The five-term version was selected to include the
,
, and
values found by Viljoen as shown in
Table 1. Selecting the material law activated the proper hyperelastic material model for the simulation. Rubber was selected as the material for these models, and the density was altered to that of Smooth-Sil 950 (1236.28 kg/m
3) [
25].
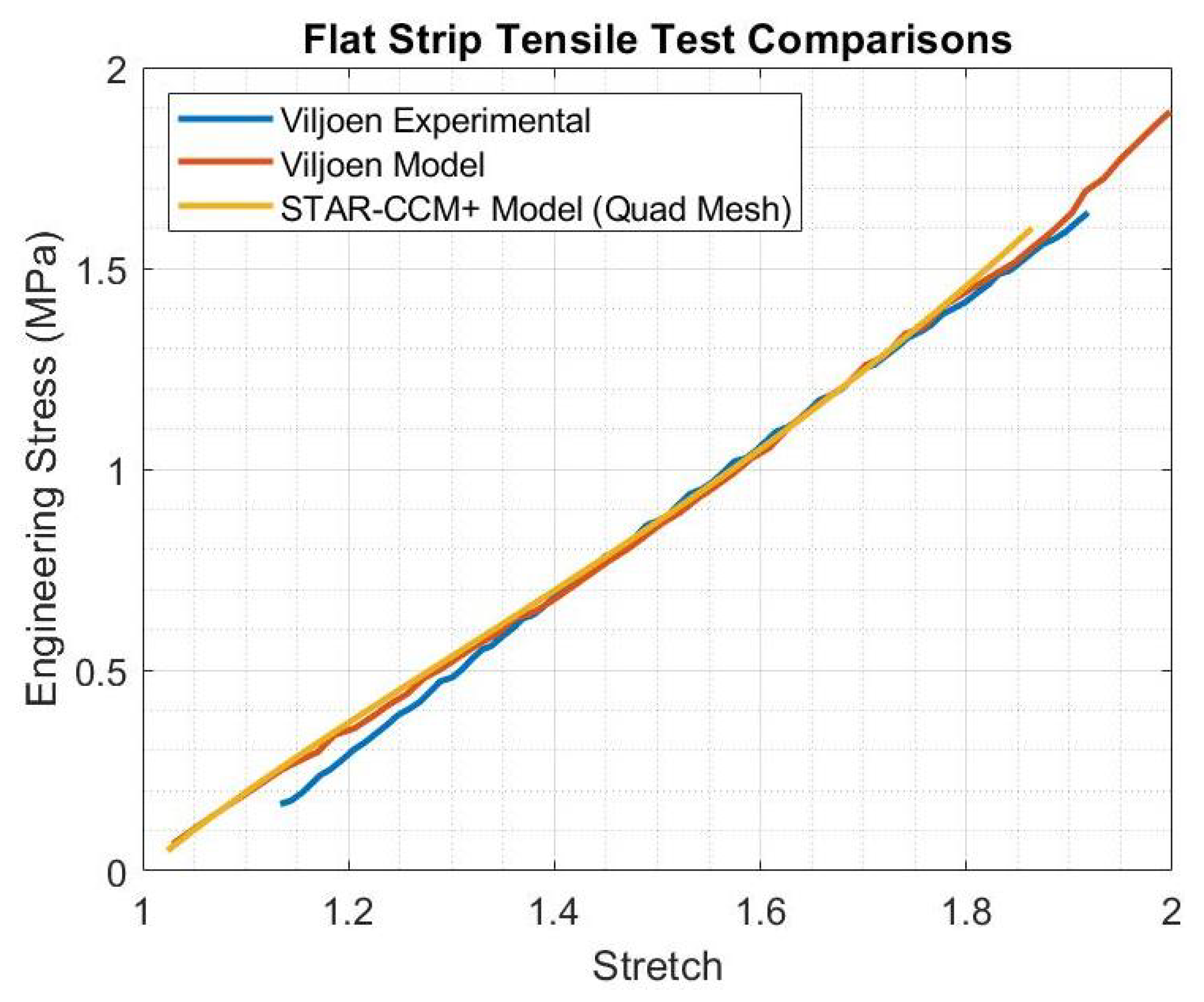
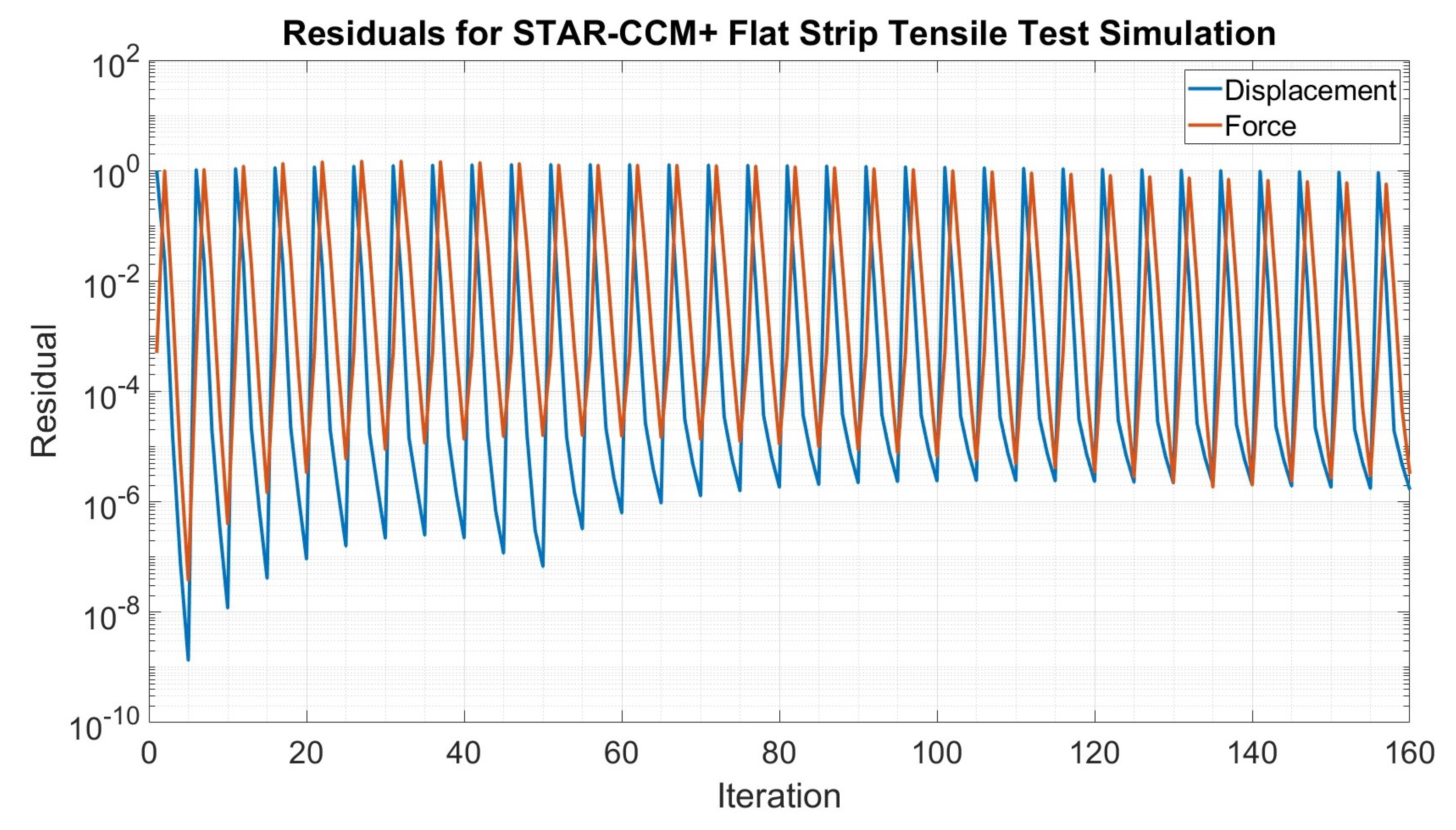
For the rectangular flat strip, two segments were made to represent the applied tensile force and the fixed edge; it was not necessary to restrict movement in the sides of the part. The force applied to the distal edge was a ramped load defined as a custom vector field function. This field function varied the applied force,
, so that it would be equivalent to Equation (
33) which is a rearrangement of Equation (
31) and was used by Viljoen to determine the engineering stress experienced by the uniaxial specimens:
The ramped vector field function increased the applied force in the loaded direction so that at the end of the ramp it would be equivalent to the force used to reach the maximum reported engineering stress from Viljoen,
, for discrete time increments,
, until the time that the ramp ends,
:
The stretch was determined with a scalar field function similar to Equation (
32):
Equation (
35) was used in place of Equation (
32) because it was unnecessary to calculate the length of the rectangle,
l, in STAR-CCM+ directly since the displacement in the direction of loading,
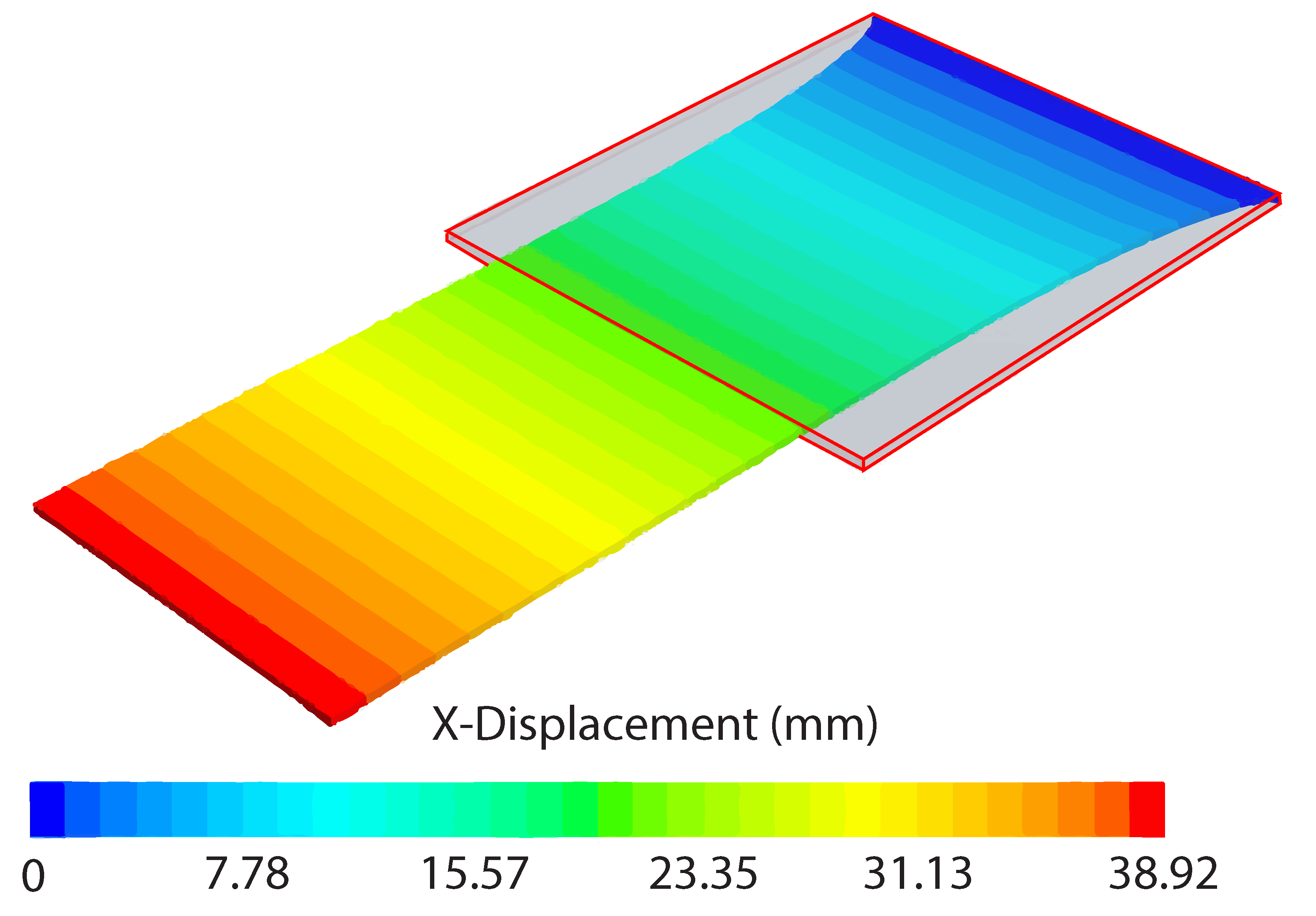
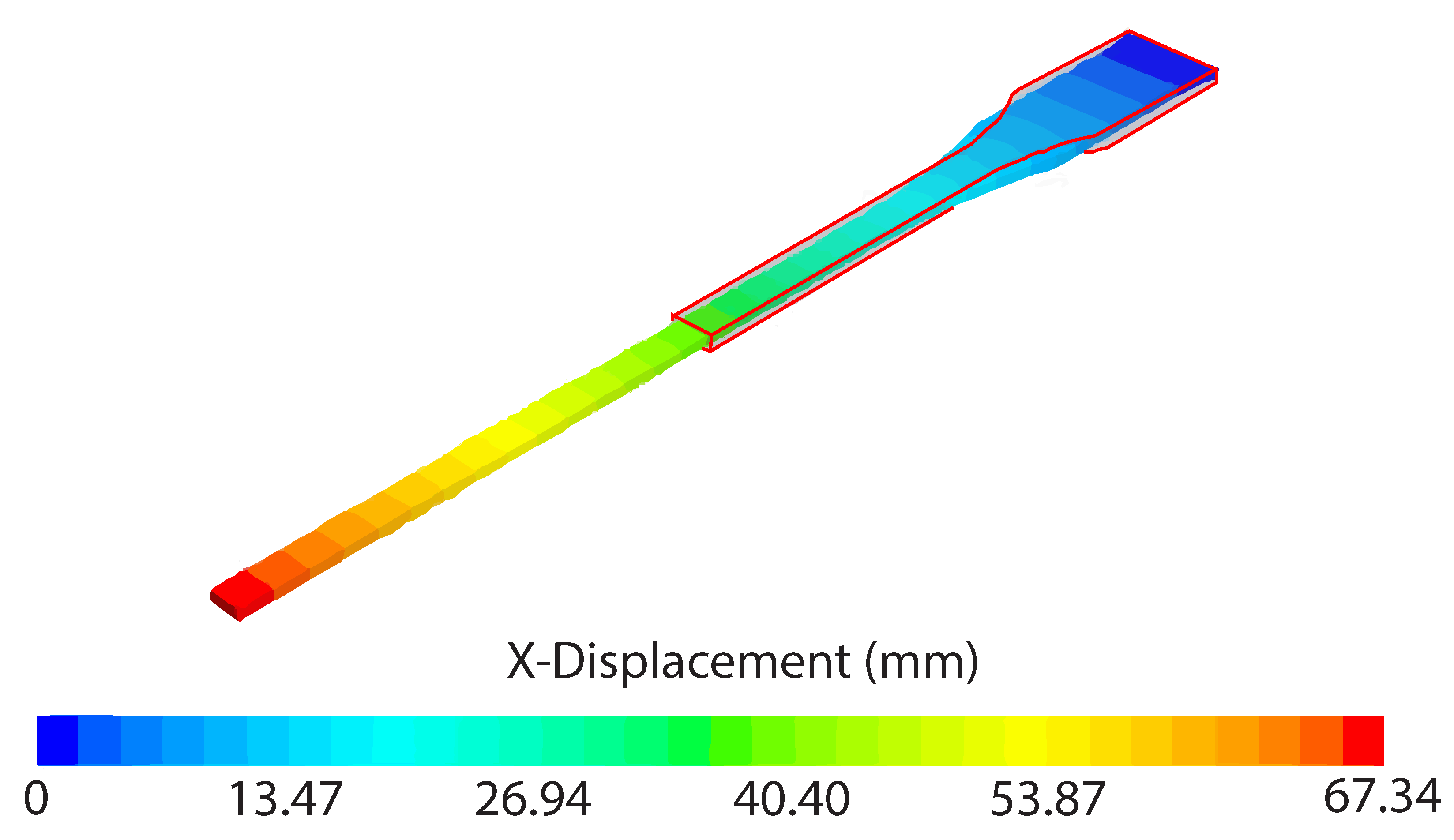
, of a point probe at the loaded edge could be easily recorded. The probe was placed in the center of this face. Reports, monitors, and plots for the engineering stress and stretch of the loaded edge point probe were generated. Scenes showing the stress and
x-displacement were generated for ease of visualization.
A “directed-mesh” with an automated two-dimensional (2D) mesher was used to generate the part’s quadrilateral mesh. The base size of this mesh was set to 0.5 mm with a default and minimum target surface size of 100% and 10%, respectively, of this base size. Note that the 2D mesher was used to mesh the top surface of the flat strip and the directed mesh effectively extruded the mesh to cover the volume of the 3D object. Eight layers were used for the volume distribution.
The time step of the implicit unsteady solver, , was set to 1 s, and the stopping criteria was set so that the maximum physical time, , was 32 s and the maximum inner iterations was set to five.
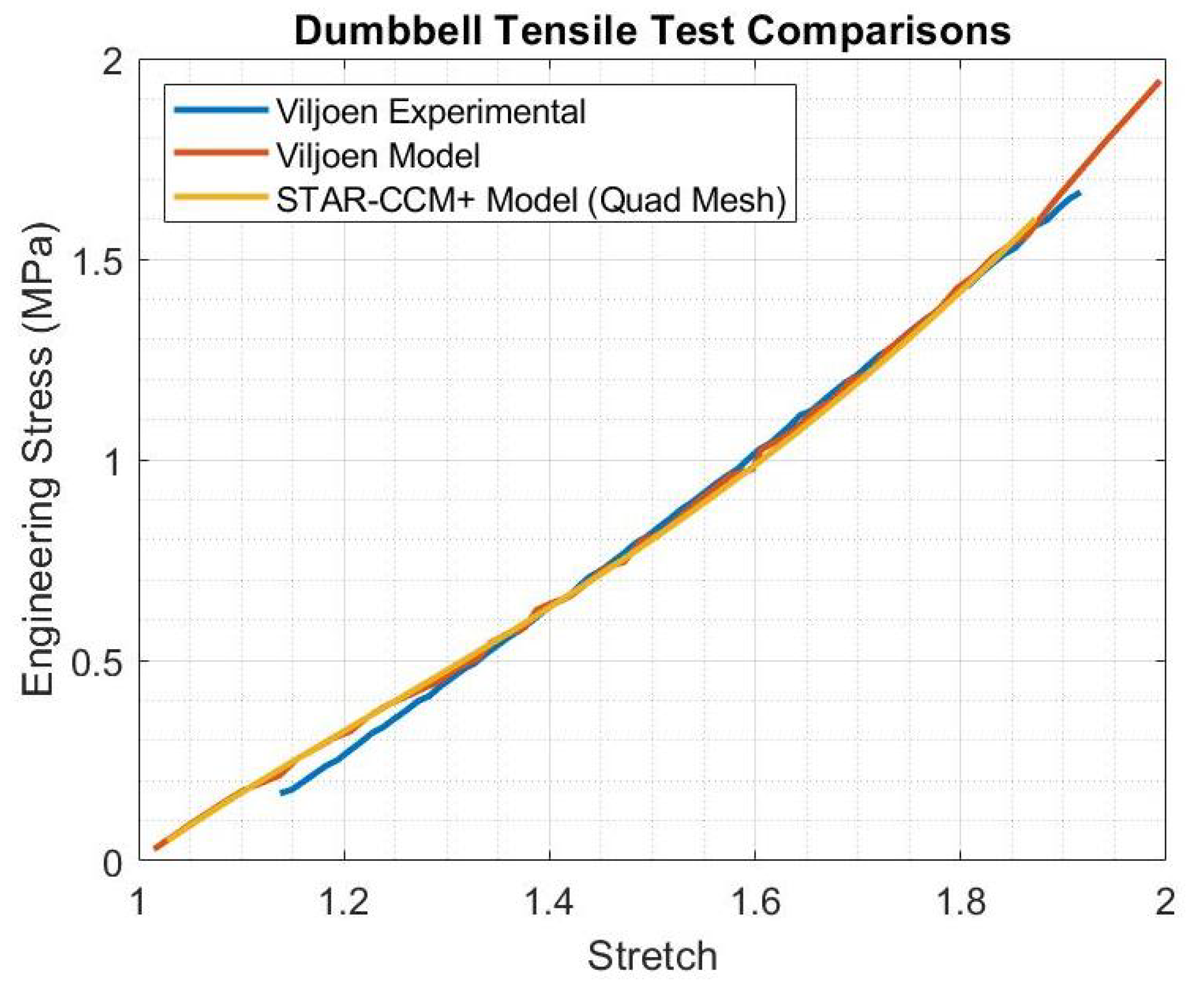
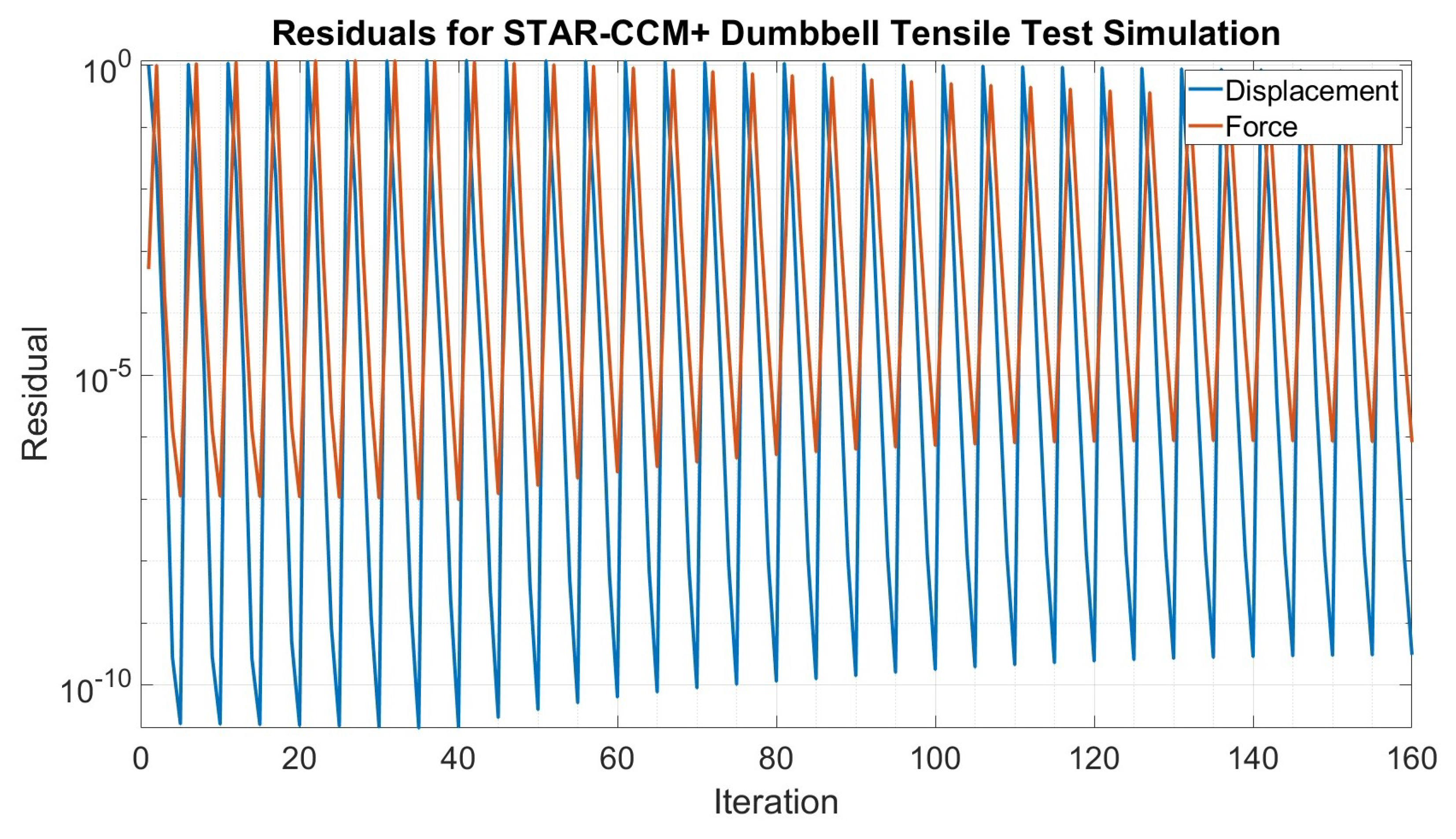
The dumbbell-shaped model required more careful consideration for its loading because Viljoen focused their analysis on the dumbbell’s gauge rectangle, as shown in
Figure 7, and used experimentally derived data to describe its motion and boundary conditions [
22]. The motion of this gauge rectangle’s nodes near the constrained edge can be modeled by including and fixing the wide edge of the dumbbell on that side. The motion of the nodes closer to the loaded edge can be modeled by applying an appropriate load, such as that described in Equation (
33), to the gauge rectangle’s face without the wider end of the dumbbell. As a result, the SolidWorks model made for the dumbbell was designed to match the dimensions in
Figure 6 but was missing the wider edge after the gauge rectangle on the loaded side.
The dumbbell shape also had two segments, one for the fixed edge and the other for the loaded edge, where a ramped force was applied, as described in Equation (
34). Unlike the rectangle model, the dumbbell model’s stretch was not determined by examining the shape’s overall length; instead, the gauge length was used to describe the stretch since Viljoen did not model the wide end of the dumbbell [
22]. As a result, two point probes were necessary, one at the near end and one at the far end of the gauge rectangle. The
x-coordinates of these points were recorded under the ramped loading by using a field function that added their displacement with their original position. The resulting
x-coordinates were then subtracted from each other to determine the new length of this region, which was applied to Equation (
32) to determine the stretch. As with the rectangular strip simulation, reports for the positions of the point probes were included and converted into monitors and plots. The mesh used for the dumbbell was made with a directed mesh with an automated 2D mesher for a quadrilateral mesh with a base size of 0.5 mm, target and minimum surface size of 10% and 100%, respectively, and 10 layers for its volume distribution. Note that the 2D mesher was used to mesh the top surface of the dumbbell and the directed mesh effectively extruded the mesh to cover the volume of the 3D object and create the 3D mesh. The time step, maximum inner iterations, and maximum physical time were identical to those of the simulation for the rectangular flat strip.
2.3.2. Validation of Numerical Methods: Biaxial Inflation Simulation
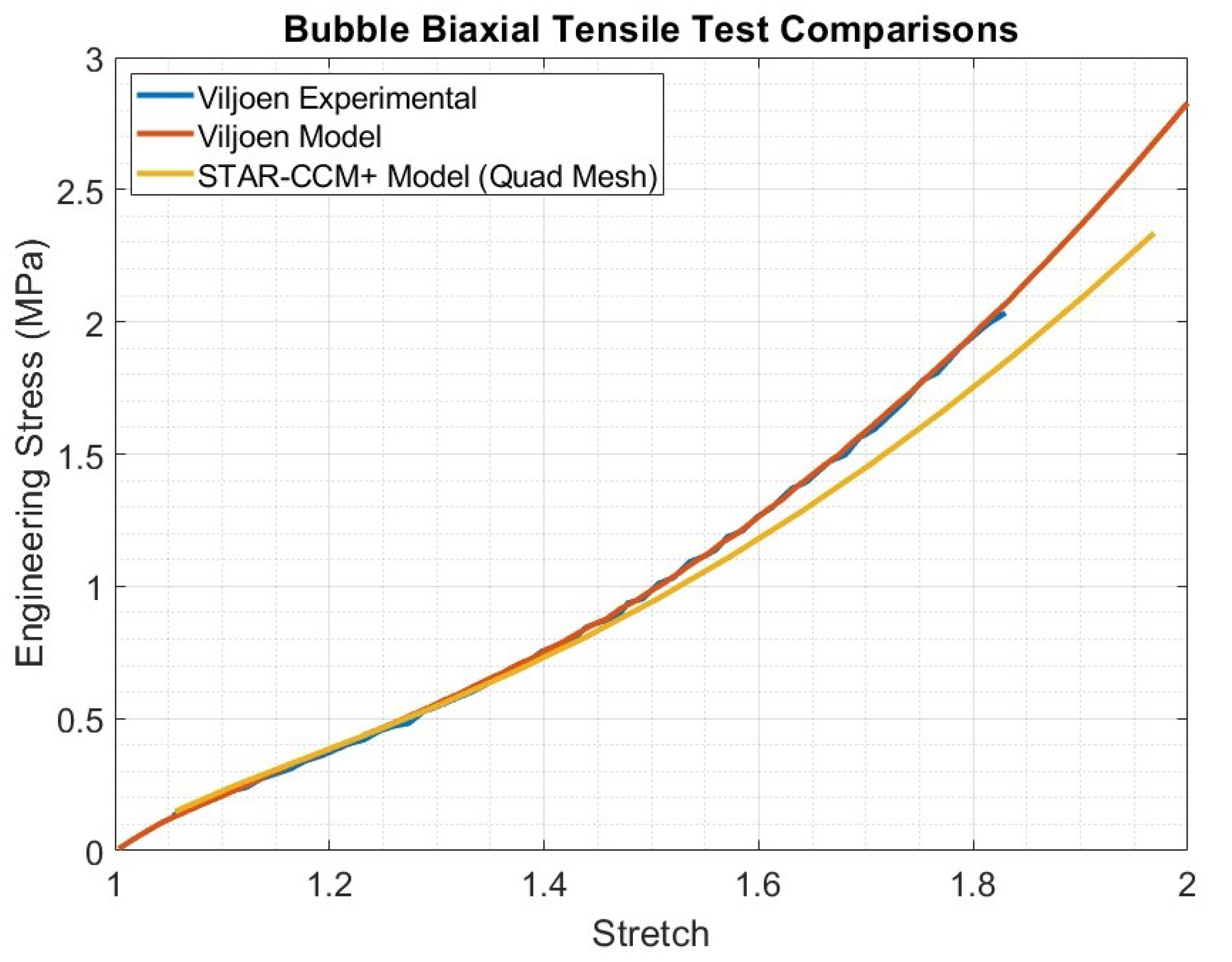
The biaxial tensile analysis involved recreating Viljoen’s bubble inflation tests. These tests were necessary to further assess the material’s tensile response in 3D space and to better understand how to model large deformations in all three dimensions, since the large deformations in the uniaxial tests occurred only in two dimensions. In their experimental work a 1.6 mm thick sheet of Smooth-Sil 950 was fixed along the periphery of a 50 mm diameter circle and inflated with controlled pressurized air. This applied pressure and resulting deformation of the circular membrane could then be translated into engineering stress and stretch using the axial symmetry of the system and the assumption of hemispherical deformation during inflation due to the material’s incompressible and isotropic characteristics [
22]. For this test, the engineering stress,
, was defined by Viljoen as follows:
where
P is the applied pressure,
is the bubble’s radius of curvature,
is the stretch, and
is the initial thickness of the membrane. In this case, the stress and stretch in the
x-direction are equivalent to those in the
y-direction [
22]. The stretch for this case was calculated using the following equation:
Since the diameter of the flat deflated membrane, , is fixed, a virtual circle with a smaller diameter can be used to assess the stretch of the bubble as it inflates. The virtual circle’s initial diameter is denoted with , and d is its instantaneous diameter.
Finally, the radius of curvature is described in the following equation where
H is the height of the inflated bubble [
22]:
Viljoen simulated the inflation tests using a finite element mesh of the flat circular membrane with 720 Quad 4 thin shell elements [
22]. The boundary conditions included fixed (zero displacement) constraints along the periphery nodes, a frictionless contact body boundary condition where the top clamps would contact the inflated membrane, and a cavity on all bottom faces to represent air pressure [
22].
From Viljoen’s analysis of their empirical data and their direct and indirect identification methods, they determined the relevant material constants for the three-parameter Mooney–Rivlin model [
22]. The parameters derived from their direct method were used for this analysis and are shown in
Table 2.
To recreate the bubble inflation tests with the proper boundary conditions in STAR-CCM+, initially a circular disc was made in SolidWorks using the same dimensions as those used in Viljoen’s simulations. As with the uniaxial simulations, a Parasolid file was made from SolidWorks and uploaded into STAR-CCM+. The models selected in STAR-CCM+ included implicit unsteady, nearly incompressible material, nonlinear geometry, solid, solid stress, solution interpolation, and three-dimensional elements. Note that selecting the implicit unsteady and solid stress models in STAR-CCM+ included the implicit unsteady and solid stress solvers in the simulation. The material law was specified to include hyperelasticity and Mooney–Rivlin (five-term). The five-term version was selected to include the nonzero
,
, and
values found by Viljoen as shown in
Table 2. Selecting the material law activated the proper hyperelastic material model for the simulation. Rubber was selected as the material for these models, and the density was altered to that of Smooth-Sil 950 (1236.28 kg/m
3) [
25].
Additionally, due to the more three-dimensional nature of the deformation in this simulation, a few key changes were made that were unnecessary for the uniaxial simulations. The solid stress load stepper option from the solid stress load step solver was added to appropriately model the membrane’s hyperelastic deformation, since simulations without this solver would not run. The max force and load steps were specified to be 40 N and 20, respectively, and the stopping criterion for each load step was set to a displacement criterion of
. The solid displacement motion option was selected to account for the large deformation. As a result, all point probes used on the model needed to have the following motion option selected to properly record data. To approximate the load and boundary conditions on the material, two segments were made to represent the applied pressure on the bottom face and the fixed edge constraint along the peripheral ring edge. The applied pressure was ramped via a vector field function that increased the applied pressure in the loaded direction so that at the end of the ramp it would be equivalent to a constant maximum pressure reported from Viljoen,
, for discrete time increments,
, until the time that the ramp ends,
:
To apply the second constraint of a frictionless contact body boundary condition where the top clamps would contact the inflated membrane, rigid contact wall constraints were necessary. However, in STAR-CCM+ these constraints can only be applied as rigid contact planes for solid stress simulations [
26]. As a result, a new SolidWorks file was made of the membrane, designing it as a 16-sided regular polygon with an inscribed circle diameter of
. This new membrane replaced the old circular one for the simulation, and rigid contact planes were added on each edge of the polygon, each with a penalty parameter of
Pa/m.
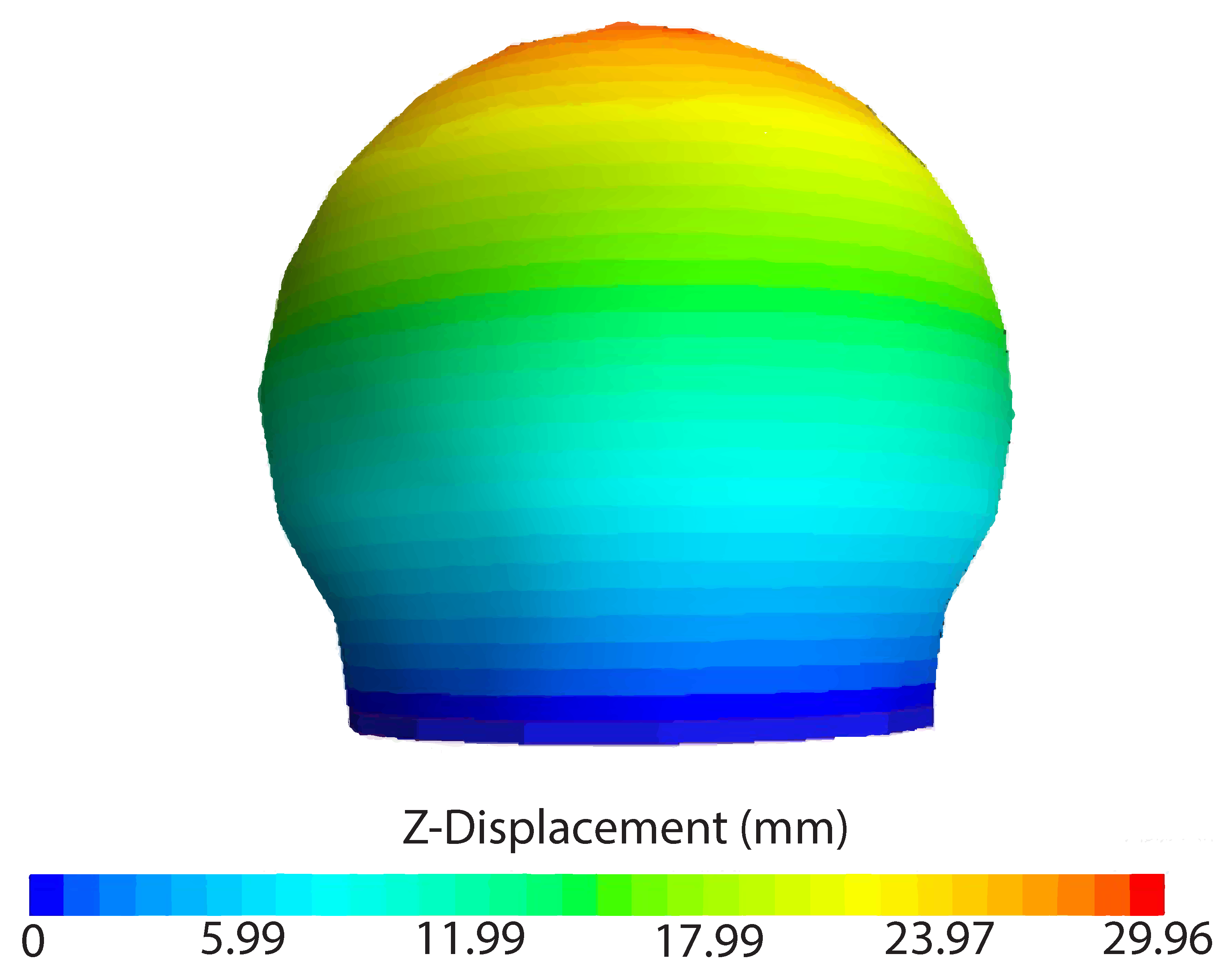
Point probes were added to measure the changes in
H and
d, as the simulation proceeded. One was placed at the center of the membrane, and a report was made to record its
z-position at different time steps of the simulation to measure
H. Another two were placed
mm in the
x-direction from the origin to represent
d for the 20 mm diameter virtual circle;
d was calculated using data from reports of the
x-position of both of these points and subtracting their positions and taking the absolute value. Monitors and plots were made from these reports. After these variables were calculated, Equations (
36)–(
38) were used to determine the stretch,
, and engineering stress,
. A scene showing the
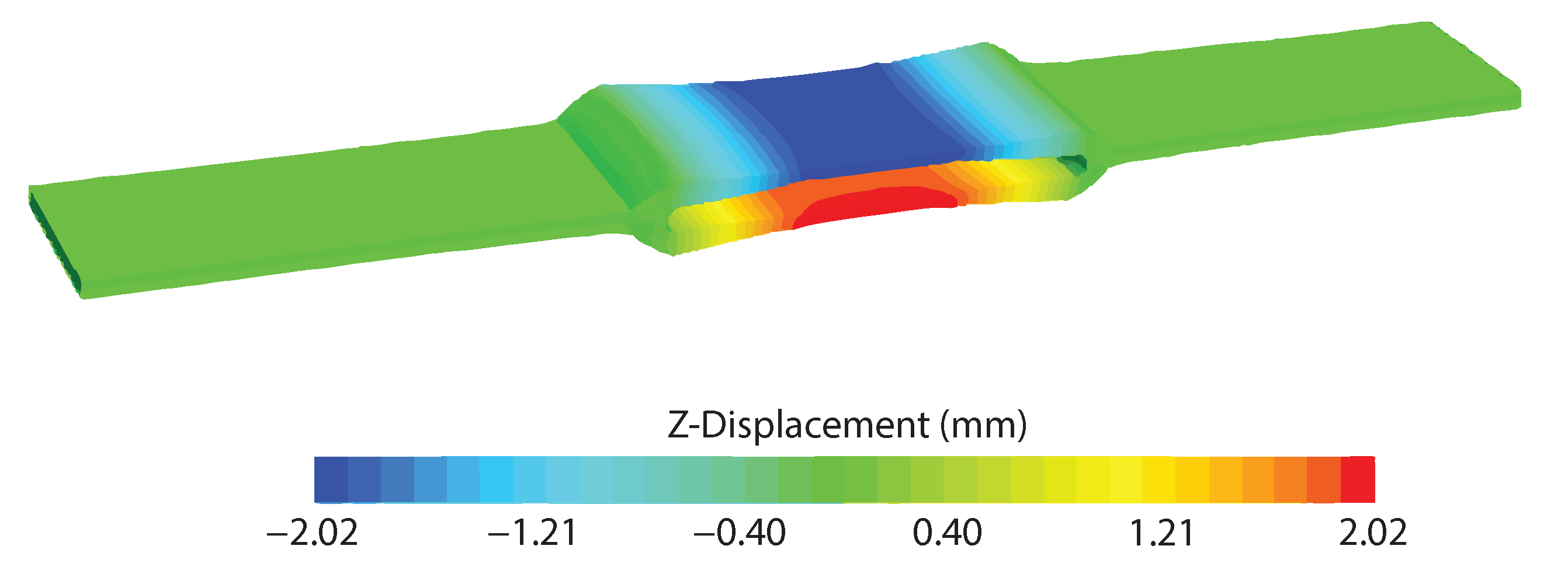
z-displacement was generated for ease of visualization.
A directed mesh with an automated 2D mesher was used to create the part’s quadrilateral mesh, where the 2D mesh was used on the top surface of the polygon and extruded to cover the volume of the 3D object to create the 3D mesh. The base mesh size was 3 mm with target and minimum surface sizes of 100% and 10% of base size, respectively, with two layers. Note that prior to the implementation of the load step solver and the displacement motion, the simulation would not run with a quadrilateral mesh due to floating point errors. A resolution to this issue was attempted using an automated 3D mesh with a tetrahedral mesh, surface remesher, and automatic surface repair. The surface repair feature enabled the simulation to run; however, the results were nonphysical likely due to volumetric locking. Further investigations of using a tetrahedral mesh for this simulation were not conducted but could be conducted in future work. The time step of the implicit unsteady solver, , was set to 1 s, and the stopping criteria were set so that the maximum physical time, , was set to 15 s and the maximum inner iteration was set to five.
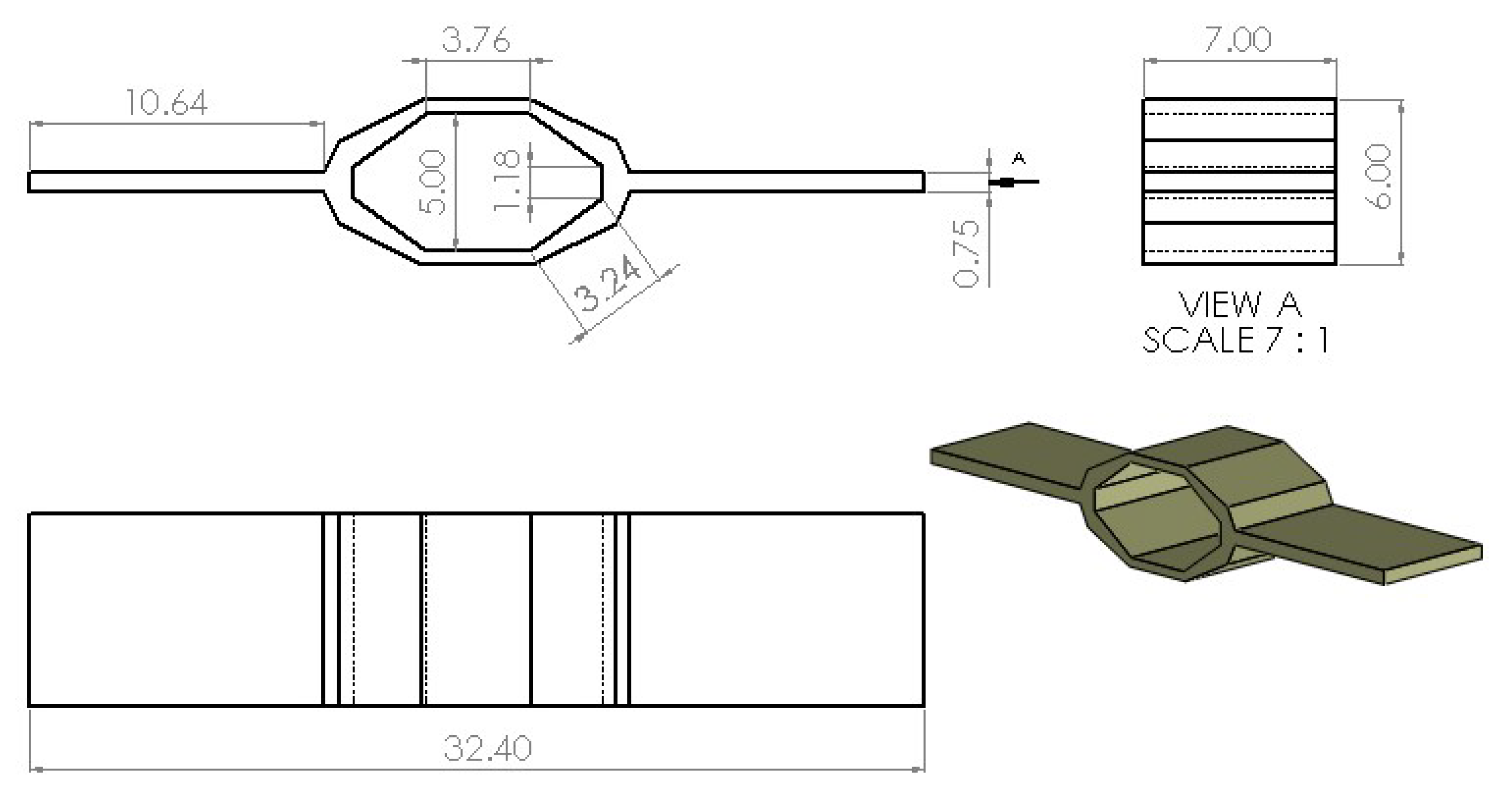
2.3.4. HexDEEC STAR-CCM+ Simulations
The generic hexDEEC design was modeled in STAR-CCM+ using the lessons learned from the validation simulations. The design for the hexDEEC was made in SolidWorks with dimensions shown in
Figure 8 and imported into STAR-CCM+ as a Parasolid file. The models selected in STAR-CCM+ included implicit unsteady, nearly incompressible material, nonlinear geometry, solid, solid stress, solution interpolation, and three-dimensional elements. Note that selecting the implicit unsteady and solid stress models in STAR-CCM+ included the implicit unsteady and solid stress solvers in the simulation. The material law selected was hyperelasticity with the Mooney–Rivlin five-parameter model. Selecting the material law activated the proper hyperelastic material model for the simulation. As with the other simulations, rubber was used as the material with an altered density to match that of Smooth-Sil 950 [
25]. As with the bubble simulation, this simulation would not run without the solid stress load stepper option from the solid stress load step solver and the solid displacement option. The parameters used for the load stepper were the same as those used for the bubble simulation in
Section 2.3.2.
The parameters used for this simulation were identical to those used by the dumbbell in
Table 1, since Viljoen’s analysis of the accuracy of their models for uniaxial testing of a unique geometry showed that this model had an error of about 2% when compared with their experimental results [
22]. The coefficients for the bubble membrane in
Table 2 had a lower error of about 1%; however, a solution in STAR-CCM+ did not converge when using these coefficients for the hexDEEC model [
22].
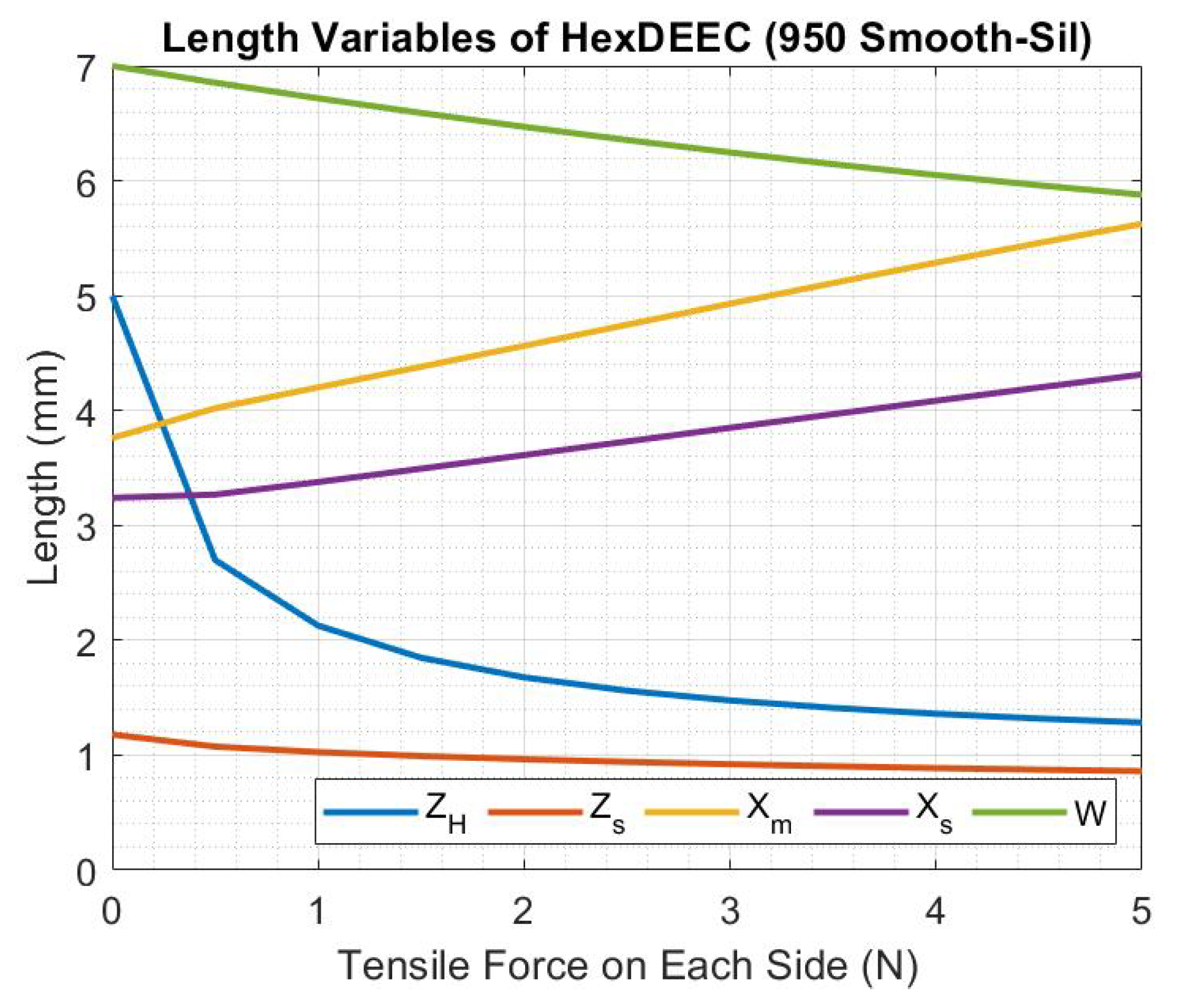
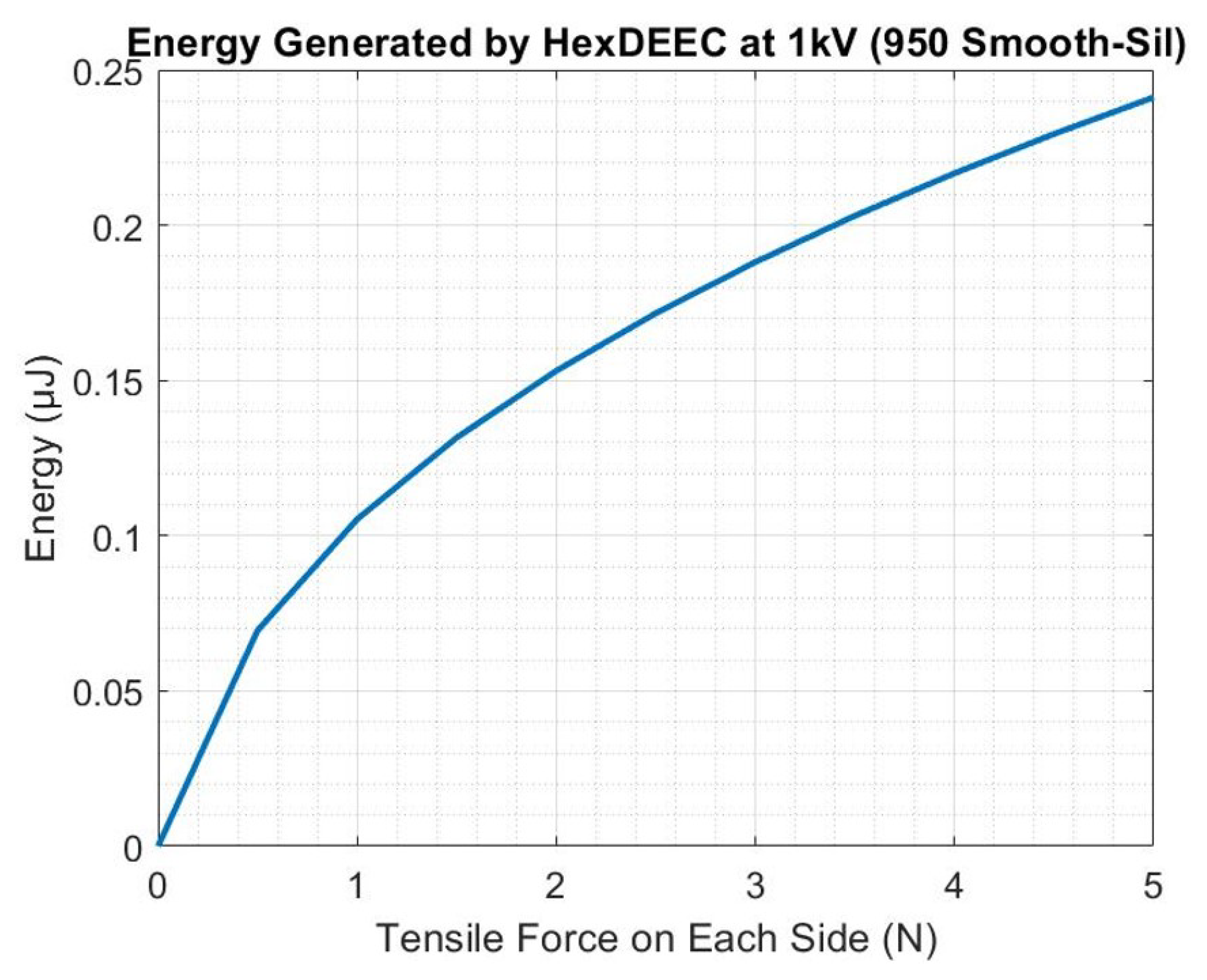
These simulations modeled the hexDEEC described in
Figure 8 undergoing biaxial tensile loading from 0 to 5 N on each side. Two segments were made to represent the ramped loads on each end of the device; as a result of this equal loading, no constraints were required. The field functions used to represent this force were represented by Equation (
40) as follows:
The plus/minus sign represents how this force was positive or negative depending on the side that it was applied on. The ramp time, , was 10 s of physical time, and the maximum force applied, , was 5 N.
To account for the variable capacitance and electrostatic forces generated by the hexDEEC as a result of its deformation, point probes were added to represent the five length variables from
Figure 5. Two points were added mid-plane of the hexDEEC to represent each length. Reports and monitors were made of each point’s
x,
y, and
z positions. The distance formula (Equation (
41)) was then used to create reports and monitors of the five length variables:
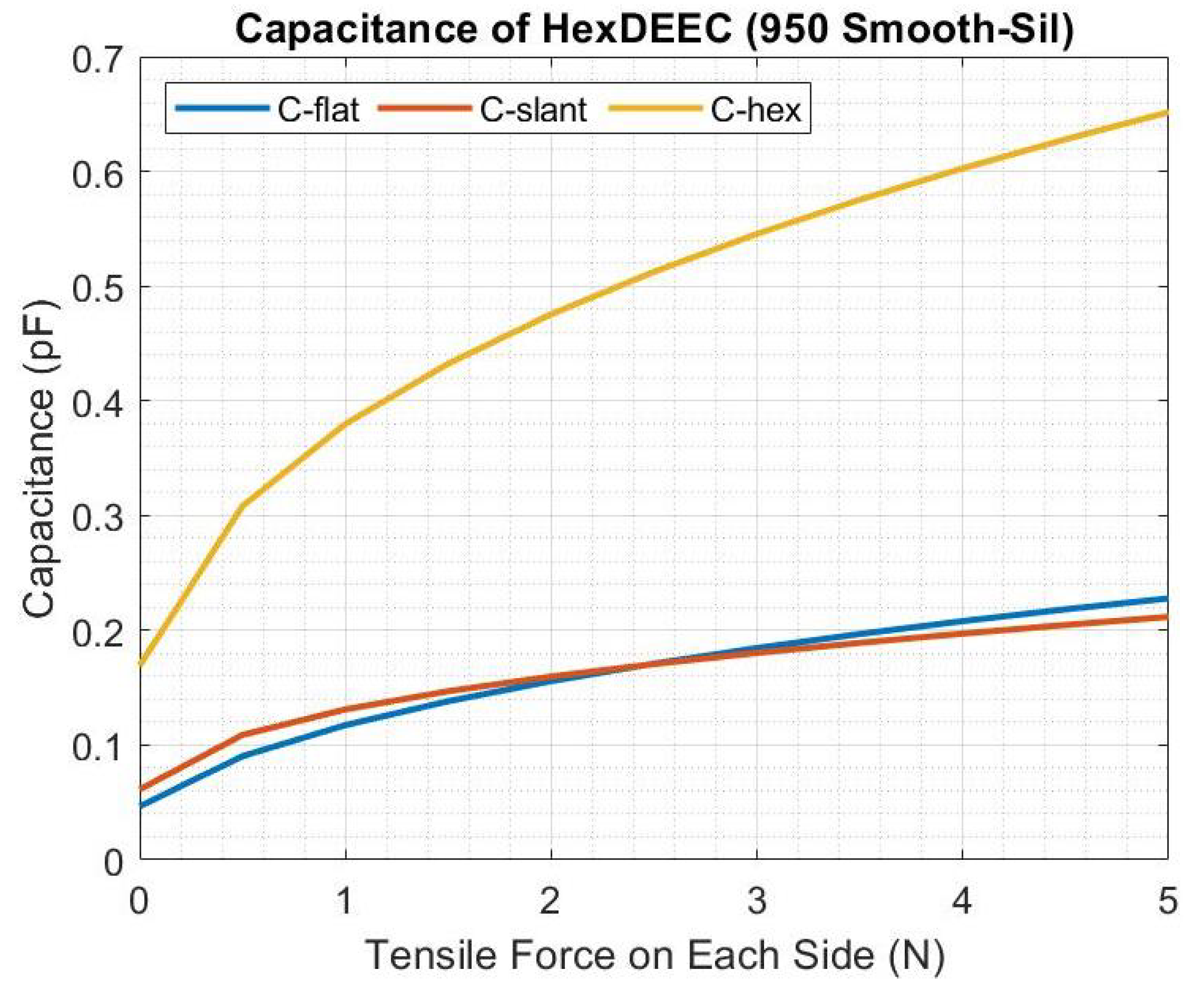
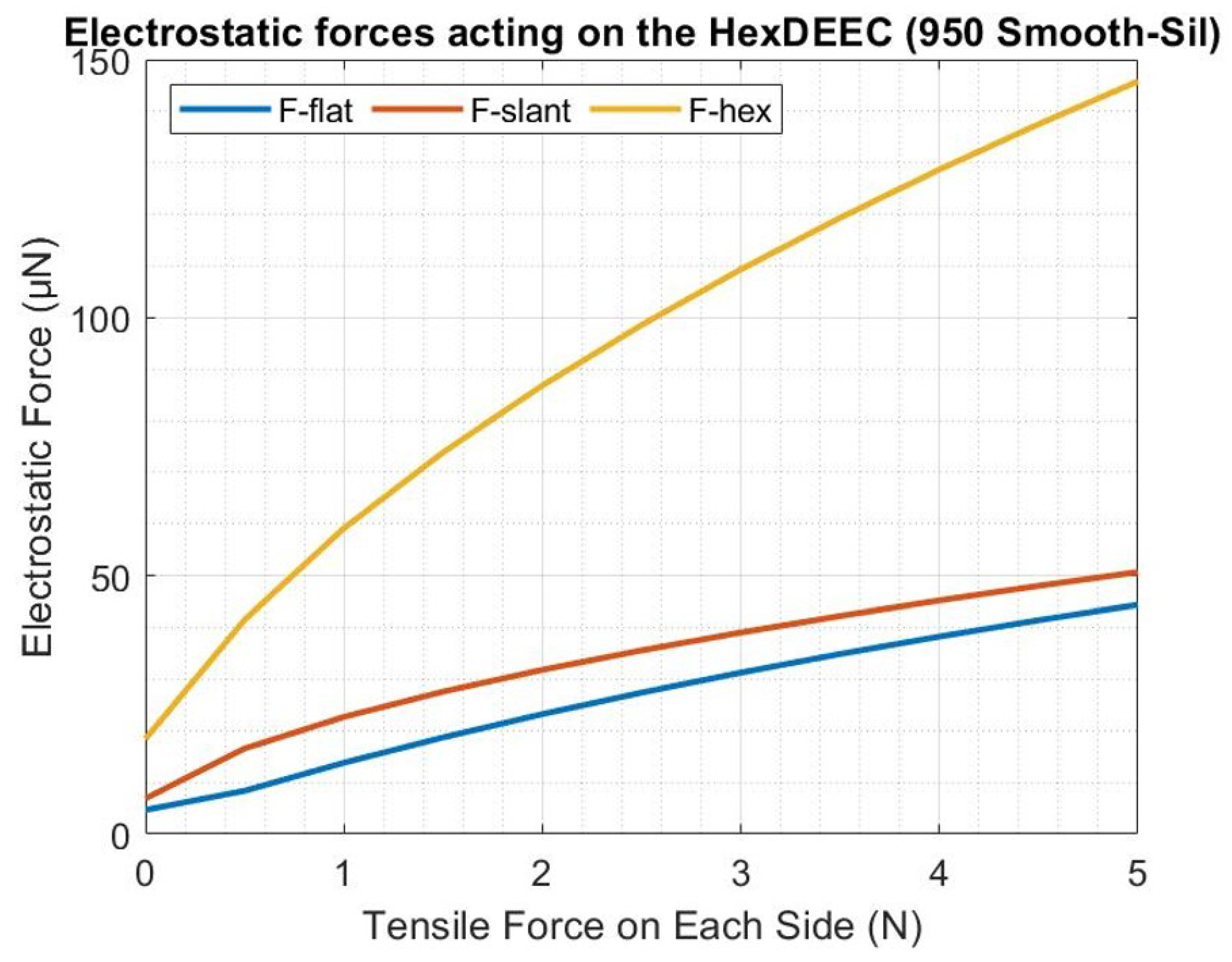
The values from the length reports were then used along with equations from
Section 2.1.1 and
Section 2.1.2 to create reports for the slanted plate capacitance (see Equation (
10)), flat plate capacitance (see Equation (
11)), total capacitance of the hexDEEC (see Equation (
12)), electrostatic potential energy (see Equation (
13)), and electrostatic force for the flat and slanted plates (see Equations (
16) and (
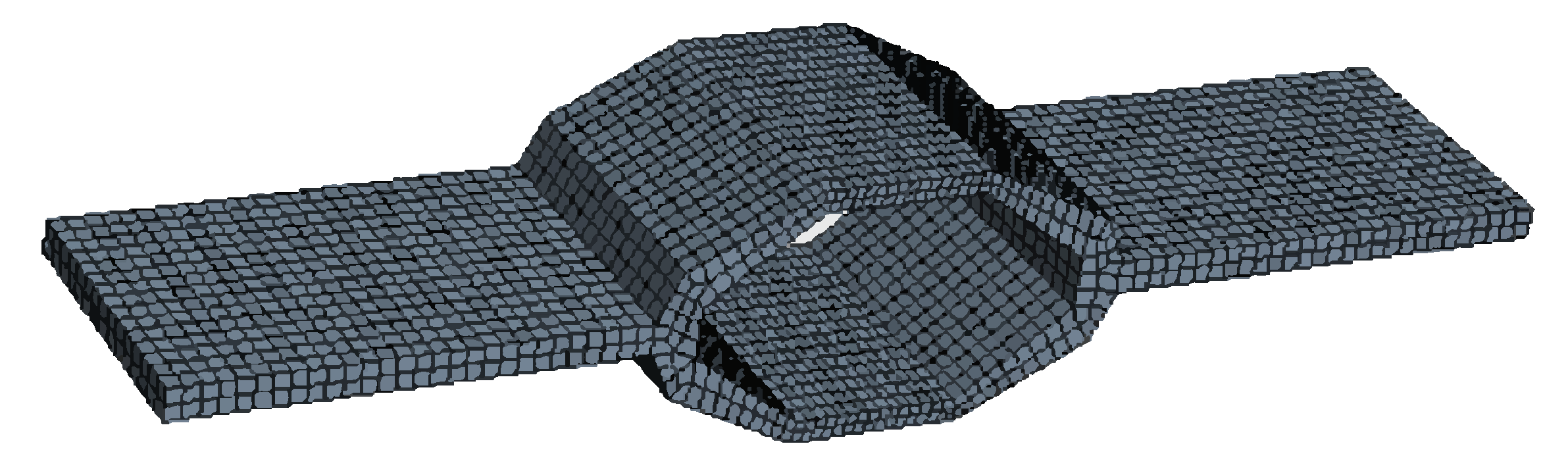
19), respectively). Note that the constant voltage used in this case was 1 kV. Monitors and plots were made for these reports. Scenes showing the mesh and
z-displacement were also generated for ease of visualization—see
Figure 9 for a scene of the mesh used in the hexDEEC simulations.
The electrostatic forces applied vertical attracting loads to the flat and slanted plates according to Equations (
16) and (
19), meaning that forces on the bottom plates were in the positive
z-direction and forces on the top plates were in the negative
z-direction. These forces were considered point forces, applied at the center of their relevant plates, and implemented using six segments and custom field functions, one for each plate. Note that the electrostatic forces acted on the 6 interior faces of the hexDEEC as it was stretched and as shown in Equations (
16) and (
19) the magnitude of these forces changed as the hexDEEC deformed. Therefore unlike the models created to replicate Viljoen’s work the hexDEEC simulation was a multiphysics simulation that modelled both the hyperelasticity and the electrostatics of the model simultaneously. However, since the electrostatic physics could be represented by custom field functions based on the equations derived in
Section 2.1.1 and
Section 2.1.2, it was unnecessary to use STAR-CCM+’s built-in electrostatic modeling capabilities. Therefore the governing equations used in the electrostatic simulations were Equations (
12), (
13), (
16) and (
19), which defined the capacitance, electrostatic potential energy, and electrostatic forces for the hexDEEC. Additionally, it was assumed that the hexDEEC received a constant applied voltage of 1 kV on its top electrodes and the air between the electrodes had a dielectric constant of 1. Note that the dielectric properties of the hyperelastic housing were not considered since as mentioned in
Section 2.1.1 there is likely very little charge in the hyperelastic material compared to that in the conductive electrodes.
A directed mesh with an automated “2D mesher” was used to create the part’s quadrilateral mesh, where the 2D mesh was applied to the side of the hexDEEC and extruded to cover the volume of the 3D object to create a 3D mesh. The base size was 0.4 mm with a target and minimum surface size of 100% and 10%, respectively, and 15 layers. As with the bubble simulation in
Section 2.3.2, the time step of the implicit unsteady solver,
, was set to 1 s, and the stopping criteria was set so that the maximum physical time was set to 12 s and the maximum inner iterations was set to five. Note that the maximum time was greater than that of the ramp time, 10 s, to determine if the results of the analysis changed under constant loading.






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}