1. Introduction
Chassis dynamometers are widely used in test environments in vehicle development due to their relatively simple configurations and versatility [
1,
2]. Their scope involves vehicles, from motorcycles to heavy industrial machinery. Roller test benches can be easily integrated into diverse research and development applications. They play a chief role in developing the advanced functionalities of modern mobility. A typical use for a chassis dynamometer will be to assign a standard driving cycle as a reference speed profile with time, a WLTP cycle, for instance. The reference driving cycle could be performed either by a real driver or a driving robot. Then, the performance of the test vehicle is evaluated after it undergoes the designated driving cycle. The loading machines of the chassis dynamometer generate movement according to a driving resistance curve corresponding to the wheels’ rotational speeds. The driving resistance curve is commonly identified as an n-order polynomial whose coefficients are determined via regression methods on the results of several experiments [
3].
The classical road load simulation (RLS) is calculated with only three constant parameters, A, B, and C, attained from the test vehicle’s coast-down test [
4,
5,
6,
7]. Furthermore, the influences of road inclination, route curvature, acceleration dynamics, and ambient conditions, such as temperature and pressure, can be considered. After obtaining these parameters, a driving resistance force as a speed function is formulated. Thus, standard driving cycles like NEDC and WLTP can be performed using this technique. Moreover, it could be employed for evaluating the development goals [
4,
5,
7].
It was emphasized that testing on a chassis dynamometer requires additional corrections to make the results more relevant to the corresponding road driving tests. The chassis dynamometer itself, however, creates an “environment” that adversely influences the experimental results. Depending on the focus of the investigations in a test bench facility, there is usually a conflict of objectives. A study was made in [
8] to investigate the influence of altering some test conditions of a chassis dynamometer on fuel consumption. In the chassis dynamometer setup, some factors significantly influenced the fuel consumption measurement, such as pedal operating, speed error, vehicle alignment, tire type, tire pressure, and the simulated vehicle mass. Another issue is the conflict between acoustics experiments and controlling the climatic conditions of the chassis dynamometer test bench. The test concept for acoustic examinations of the test vehicle requires minimizing the noise from the test bench [
9]. According to [
9], heating and distortion effects may damage tires used even for a short time on rolling roads. As a solution, some dynamometer systems could be equipped with tire-cooling systems to reduce tire damage, as investigated by [
10]. Nevertheless, an extensive air conditioning system would significantly impact acoustics [
9]. It was shown in [
11] that even different retaining methods affect the acoustic signature and the noise level of the test vehicle to various extents.
It is understood that tire contact with the roller is an important matter when representing the vehicle’s dynamic behavior. Hence, it is highly relevant for vehicle dynamic simulation models. Therefore, the tire contact on the bench must be thoroughly analyzed for chassis benches [
11]. The tires of the drive wheels are placed on the rollers and are engaged with the rollers by means of friction forces. Therefore, in terms of constraints and potential sources of error, the chassis dynamometer directly influences the measurement results. These mainly concern the measurement of losses in the drive train and tires, as the rolling resistance of the tire mounted on the roller differs significantly from its actual value on the flat road. Furthermore, there is a noticeable difference between running it on rollers of different diameters [
9]. The rollers’ size significantly affects the rolling resistance [
12]. Moreover, in the same study, other influential aspects on the rolling were also investigated for each roller size: vertical load, angular speed, and inflation pressure. The results showed that the smaller the roller sides, the more sensitive the rolling resistance would be to changing other factors.
An approach for adjusting the driving resistances model of the chassis dynamometer is proposed in [
6]. The authors introduced some adjustment factors to reproduce the chassis dynamometer’s driving resistances correctly. The procedure begins with data acquisition from on-road testing. Next, an offline simulation verifies the vehicle model by comparing the coast-down test results of actual and simulated values. Finally, an online simulation is executed on the test bench. The scaling factors for the rolling resistance model are tuned via a compensation model in the final stage. The adjustment factors were verified by comparing the results of the coast-down tests between the real-world measurements, simulation results, and test bench measurements. The accuracy of the results varied with speed. The maximum error for the driving test was about 8% at a 10 km/h velocity. Nevertheless, the RLS without tire slip considerations causes deviation between the actual driving resistance in the real driving environment and the simulated driving resistance on the test bench. For this reason, it is denoted as a non-slip model in some studies [
13]. The authors of [
11] developed a chassis dynamometer with a twin roller for each tire and a vehicle longitudinal dynamics model considering the contact between the tire and the rollers. By employing a Pacejka tire model to simulate the vehicle dynamics, they achieved accurate results compared to measured data. However, the error value was substantially higher for a slip-independent tire model. Mechanical power loss in the tire is the main contributor to vehicle losses in fuel economy tests on roller dynamometers [
14]. Consequently, several research works have emphasized developing detailed dynamic tire models for determining high-resolution powertrain efficiency, such as modeling the tire deformation with a flexible ring model that extended with dynamic pressure distribution as it underwent high-speed rolling conditions [
15]. In another work [
16], a brush-type tire model was proposed intending to achieve tire behavior similar to Pacejka’s model results but using a more straightforward approach while considering rubber friction characteristics. A relevant work [
17] proposes a hybrid tire model of the absolute modal coordinate formulation with the LuGre tire model.
A recent study of a detailed physical model for the contact between the tire and a twin roller was developed in [
18]. The creation of this model is based on substituting the normal force from the twin roller in a Pacejka tire model. However, the rolling resistance increases in the case of double contact between the two rollers and traction tire compared to the flat contact patch on the road or to a single-roller dynamometer [
18,
19]. The authors of [
18] validated their model with two coast-down tests, starting at 60 km/h and 100 km/h. Since there are insufficient thorough tire–roller analytical studies for dynamic driving maneuvers, this work investigates the adaptation of different tire models to predict the traction force behavior of the tire on the roller of the chassis dynamometer test bench. Moreover, the examination proposed in this article concentrates on reproducing the total bench resistance forces for both driving and braking cases and modeling the slip tire–roller interactions based on different driving cycle maneuvers. This work considers the longitudinal vehicle–bench dynamics, and no turning maneuvers are simulated.
2. Limitations of Chassis Roller Dynamometer
A fundamental component in the chassis dynamometer apparatus is the vehicle fastening system, which holds the test vehicle over the rollers. The vehicle is aligned on the rollers with a particular retention system. Moreover, restraining the test vehicle with conventional securing via straps or chains substantially affects the test results [
11,
13]. Alternatively, the vehicle may be tied to the rear of the trailer hitch or a towing lug. This restraint does not establish any constraints to the vertical axis, preventing additional vertical forces into the vehicle. However, the restraint should be sufficiently stiff in dynamic operations to prevent displacements during the test course [
10,
13,
20]. Two methods of retaining the test vehicle on a chassis dynamometer are examined in [
11]: the typical strap tie-down restraint and an adjustable barrier/corner restraint. The second option is shown in
Figure 1. The advantage of employing the barrier/corner design over other types is its minimal effect on the vehicle dynamics. Moreover, it adds no additional loading to the tires. Also, the test vehicle may be accurately centered on the rollers.
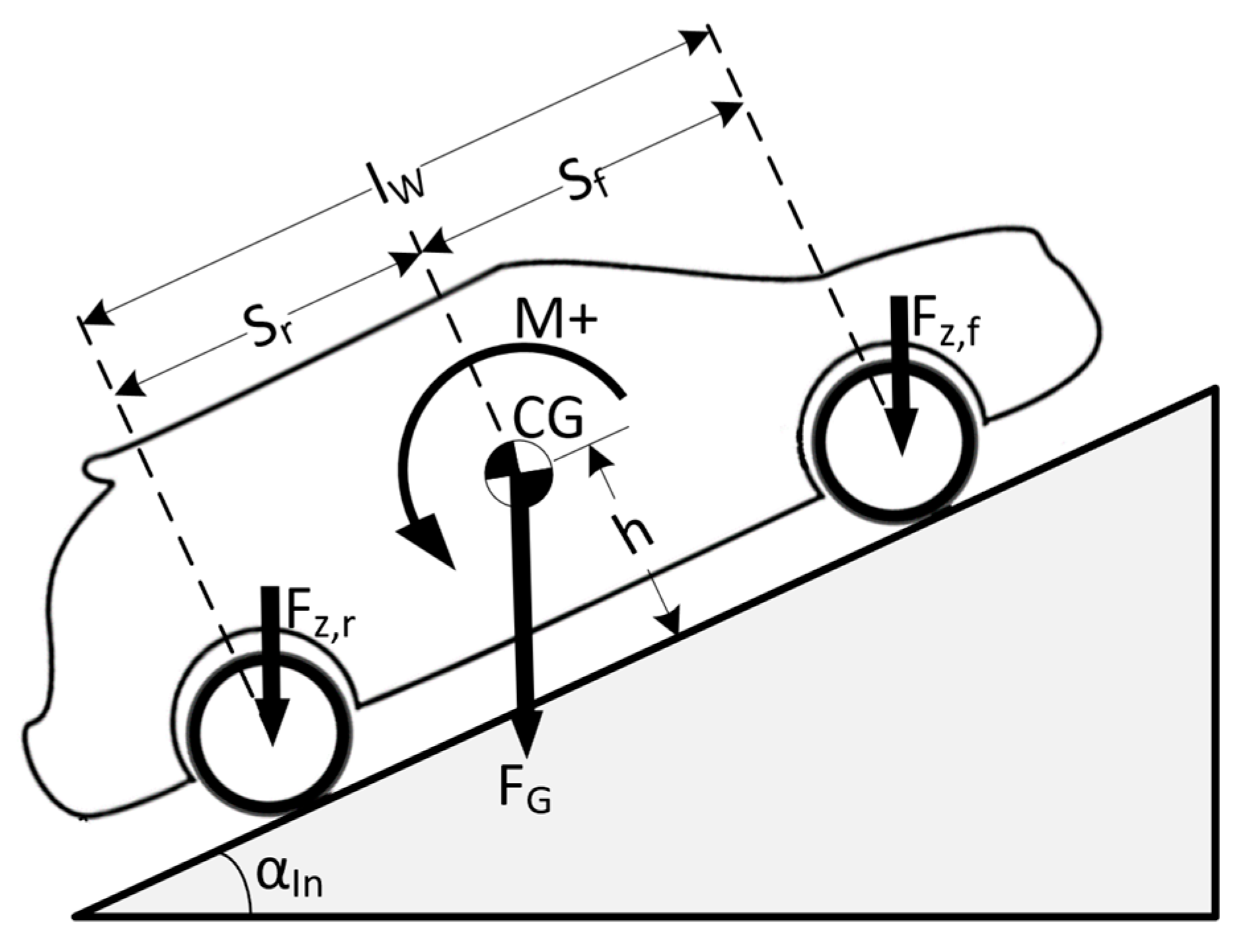
The maximum transferable force between the driven wheels and the roller body quantity depends on many factors, such as the vehicle’s restraining points’ heights compared to the location of the vehicle’s center of gravity, as proven in [
13]. The free body diagram in
Figure 2 demonstrates the forces acting on the test vehicle when using the rear restraint type to avoid introducing an additional vertical load on the tires. Through forces and movement equilibrium, the vertical loads on the front axle (
Fz,f) and rear axle (
Fz,r) are described in Equation (1).
The traction force on the front axle (
Fx,f) is calculated by dividing the driving movement at the front axle by the effective tire radius. The static friction coefficient (
μh) between the rollers and the tires is assumed to be equal 1, and the height of the vehicle’s center of gravity (
h) is experimentally determined to be equal to 0.3 m. The maximum traction force of the front axle (
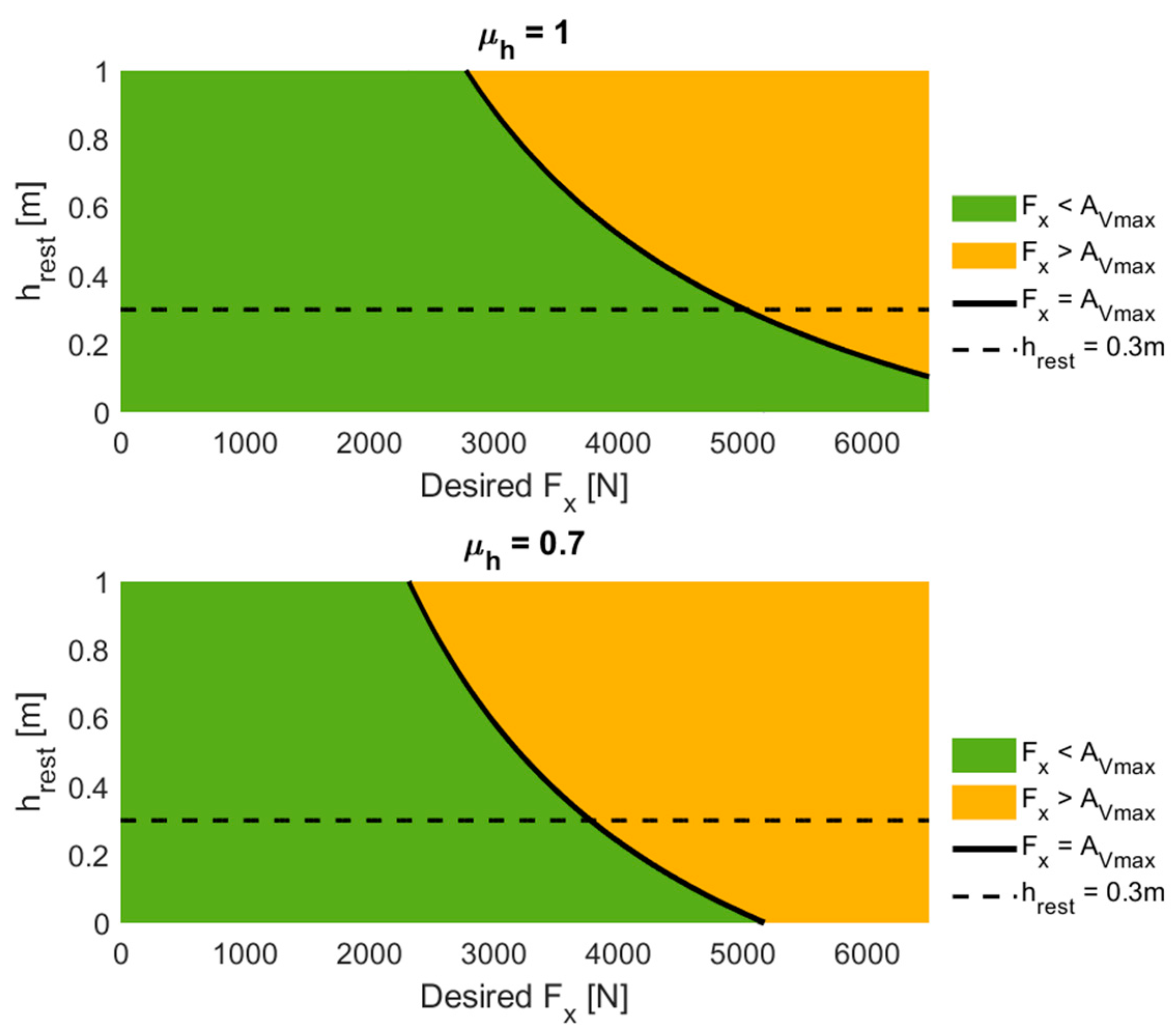
AV,max) is achieved as in Equation (2). By varying the restraint height (
hrest) and
Frest, we obtain the corresponding
AV,max values, demonstrated by a plane in
Figure 3. On the other hand, the demanded driving force (
Fx) that equals the driving movement (
Mdrive) divided by the effective rolling radius (
re) (i.e.,
Fx =
Mdrive/re, is a linearly increasing surface independent of
hrest. At the end of the intersection between the
AV,max and
Fx surfaces, the range of reachable traction force for a specific
μh can be identified.
If the driving movement exceeds the traction potential of the axle, the wheels begin to spin. Furthermore, the vertical loads of the front axle decrease with increases in either
hrest or
Fx, while it increases for the rear axle drive, as proven in [
13]. In addition, the driving resistance force must be accurately regenerated on the test bench to match real-environment driving. High slipping between the tire and roller will occur when the driving movement exceeds the traction potential. If the slip exceeds a critical slip value, the coating material of the roller and the tire surface will wear faster; so, more errors will occur in the test results [
13]. The consequence would be decreased adhesion between the tire and the roller. Therefore, the driving force must always be maintained at less than the maximum transferable force depending on the normal force and the adhesion coefficient. In other words, the frictionally engaged contact between the tire and the roller can critically limit the range of mobility in dynamic driving maneuvers. Therefore, this must be avoided to prevent damaging the coating of the roll surface and the attached tire.
Figure 4 shows how much friction influences the traction force capacity. For
hrest = 0.3 m, the maximum
Fx is diminished from 5015 N to 3775 N by reducing
μh from 1 to 0.7.
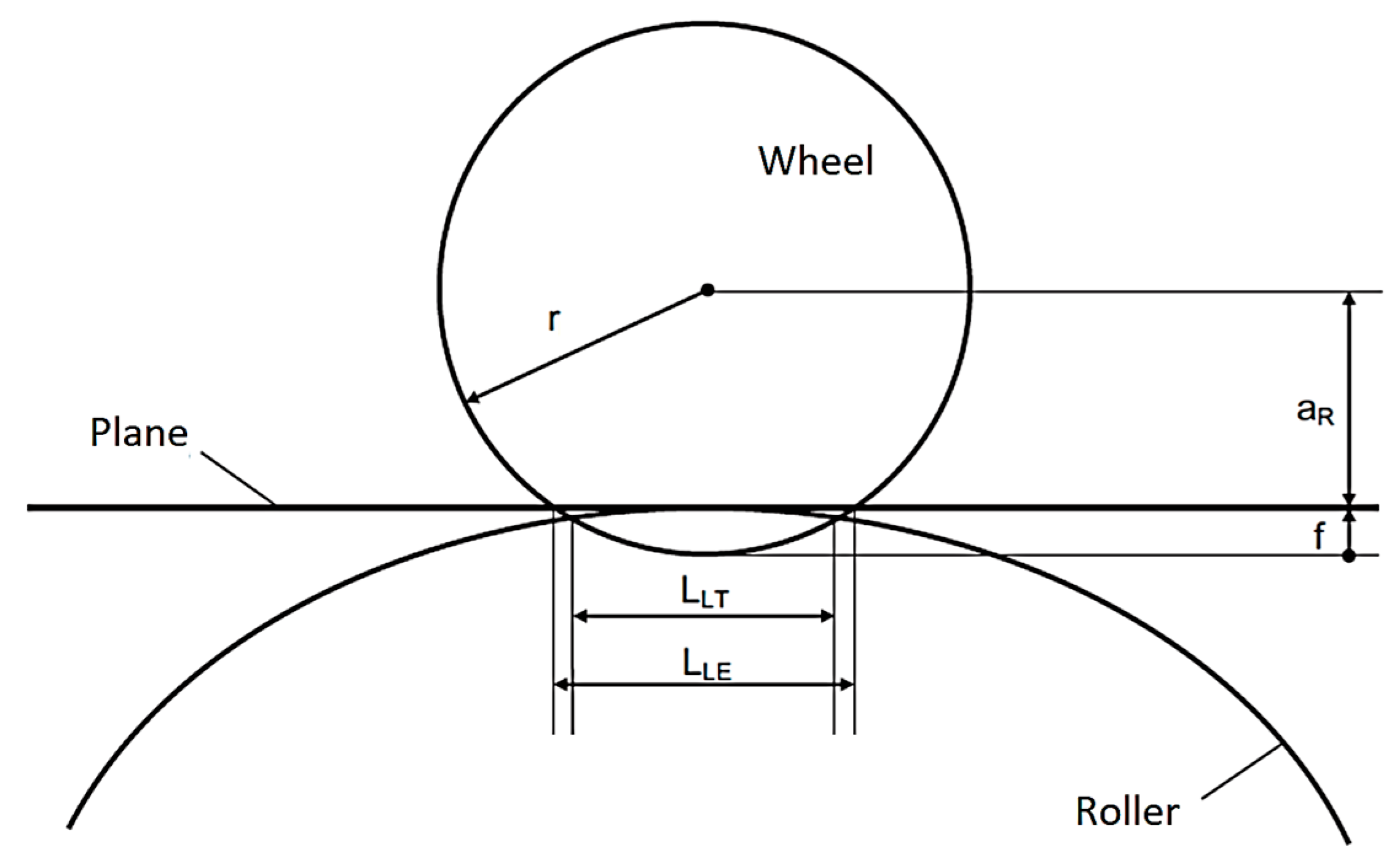
The modified rolling resistance at the roller is approximated in [
2,
3] as in Equation (3). The rolling resistance force of the tire on the road (
FR) is affected by the ratio of the unloaded tire radius (
r) to the roller radius (
Rr) so that an effective rolling resistance on the roller (
FRR) will arise. The accuracy of the calculated rolling resistance on the roller is further improved in [
21]. The author added a correction factor
eFR to Equation (3). The simplest form of the proposed correction factor is
, where
p is the tire’s pressure (in bars), and
FZp is the normalized tire’s load (i.e., compared to the full tire’s load) according to the ETRTO (European Tire and Rim Technical Organization (Etrto)
https://www.etrto.org/, accessed on 27 November 2023) load standard. More details are available in [
21]. Finally, the new effective rolling resistance of the tire on the roller is represented in Equation (4).
3. Vehicle Dynamic Model
The electric car shown in
Figure 5 is used for research in different automotive engineering and e-mobility-related projects. Besides the technical data of this vehicle, actual maneuver test measurements will be used to validate the developed simulation models. The battery model of the vehicle under the test (VUT) was developed in [
22].
According to [
23], the calculation of the required driving force for a drivetrain test bench, known as the road load simulation, is based on the equation of motion of the vehicle’s center of gravity in the longitudinal direction. By assuming driving on a dry surface and ignoring the toe-in resistance and the tire rolling resistance part from air ventilation, the total driving force (
Fd) is given in Equation (5).
The air resistance (
FA) in the longitudinal direction is a function of the front surface area of the vehicle (
AF), air density (
ρ), air resistance coefficient with frontal flow wind (
Cd), and relative air speed (
vrel). Therefore, Equation (6) puts all terms together.
Acceleration resistance (
Facc) occurs during speed changes so that the vehicle’s inertia acts opposite to the direction of travel. The rotational mass factor (
λ*) is significant for considering the additional mass effect from the rotational parts of the vehicle. As a result, the acceleration resistance is obtained as a function of the longitudinal acceleration (
ax), as shown in Equation (7).
During acceleration, the engine, i.e., the electric motor in case of an electric powertrain, and other drivetrain parts must also be rotationally accelerated, creating a reaction movement that resists the driving force. This effect is manifested as additional mass to the vehicle’s actual mass (
m). According to [
24],
λ* is expressed in Equation (8).
JE,
Ja,f,
Ja,r are the inertias of the engine/motor, front axle, and rear axles.
id,
ig are the gear ratios of the differential gear and the gearbox, respectively.
JC is the total inertia of the coupling elements (i.e., coupling disc, torque convertor, driveshaft, …), and
re is the effective tire radius. Climbing resistance (
FC) occurs when there is an inclination in the roadway with an angle (
αIn). Therefore, Equation (9) represents
FC as a function of the sine of
αIn and vehicle weight (
FG).
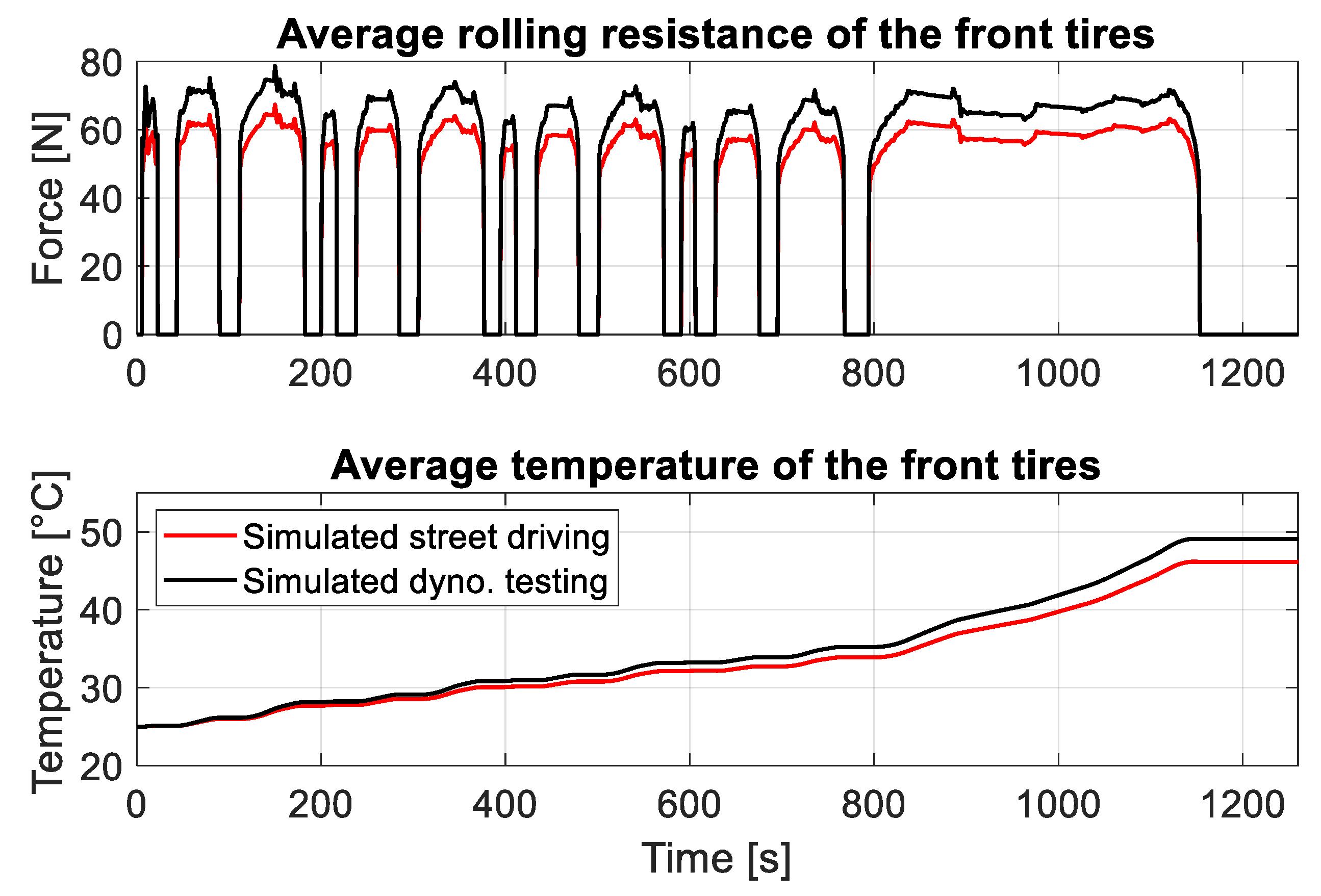
Considering a nearly linear profile of the rolling resistance across the vertical wheel load
FzW, a load-related characteristic can be defined with the dimensionless rolling resistance coefficient
fRR. According to [
25], rolling resistance alternates significantly during dynamic driving maneuvers. For example, it may rise roughly 20% over the steady-state estimated value. Consequently, the rolling resistance tire model proposed in [
25] that models the temperature and velocity influences will be employed to accurately estimate the tire’s rolling resistance when mounted on the roller. First, the steady-state rolling resistance (
FR*) is shown in Equation (10). The tire’s steady-state temperature (
T*) is then expressed in Equation (11). Next, the tire’s transient state temperature
T(
t) is found by solving Equation (12). Finally, the rolling resistance force is expressed in Equation (13) as a function of speed, temperature, and vertical load.
where:
fRR—Rolling resistance coefficient;
FzW—Normal force on the tire [N];
Atire—Outer tire surface area [m²];
k—Sensibility exponent factor;
h0—Reference heat exchange coefficient for rubber and air [W/m²/K];
ε—Sensitivity of rolling resistance to temperature [1/K];
cp,tire—Specific heat transfer factor [J/kg/K];
FR(t)—Instantaneous rolling resistance force [N];
FR*—Steady-state rolling resistance force [N];
mtire—Mass of tire [kg];
Tamp—Ambient temperature [°C];
T*—Steady-state operating temperature [°C];
T(t)—Instantaneous operating temperature [°C];
vw0—Reference tire speed [m/s];
vw—Tire speed [m/s].
Parameters
k and
h0 are determined experimentally in [
25] using curve-fitting techniques. The tests were performed at different reference tire speed values. The best results were attained at
vw0 = 80 km/h (22.22 m/s).
The tire is one of the most crucial components in modeling the vehicle’s dynamics. It is the core of vehicle handling and performance since this is the only means of interaction between the car and the ground. Because of its flexibility and pneumatic characteristics, the tire model has highly nonlinear behavior, making it complex to analyze. The so-called Pacejka’s Magic Formula is used to describe the different characteristics of the tires of the VUT.
The contact patch forces of the wheel include the traction force (
FxW), the cornering force (
FyW), the normal force (
FzW), and the self-aligning torque (
MzW). Traction force is a function of slip and normal force. At the same time, the cornering force and self-aligning torque are functions of slip angle and normal force. Magic Formula is an empirical equation often used to represent the contact patch forces, i.e., also known as fore and aft forces, in the tire model. The general form of the magic formula is written in Equation (14).
Coefficient
D is the maximum peak value of the curve,
C determines the shape of the curve, B determines the initial slope of the curve when it is multiplied by factors
C and
D, and
E is the curvature factor that modifies the location of the peak and the curve’s curvature. Y stands for traction force, cornering force, or self-aligning torque. The variable X denotes the slip (
κ) for traction force or slip angle (α) in both cornering and self-aligning torque. Coefficients
D,
C,
B, and
E are functions of more than 20 other empirical constant values that vary from tire to tire. In addition, the friction effect is incorporated in these coefficients due to the experimental readings. Consequently, it is decided to implement previously estimated values for
D,
C,
B, and
E for the model under consideration [
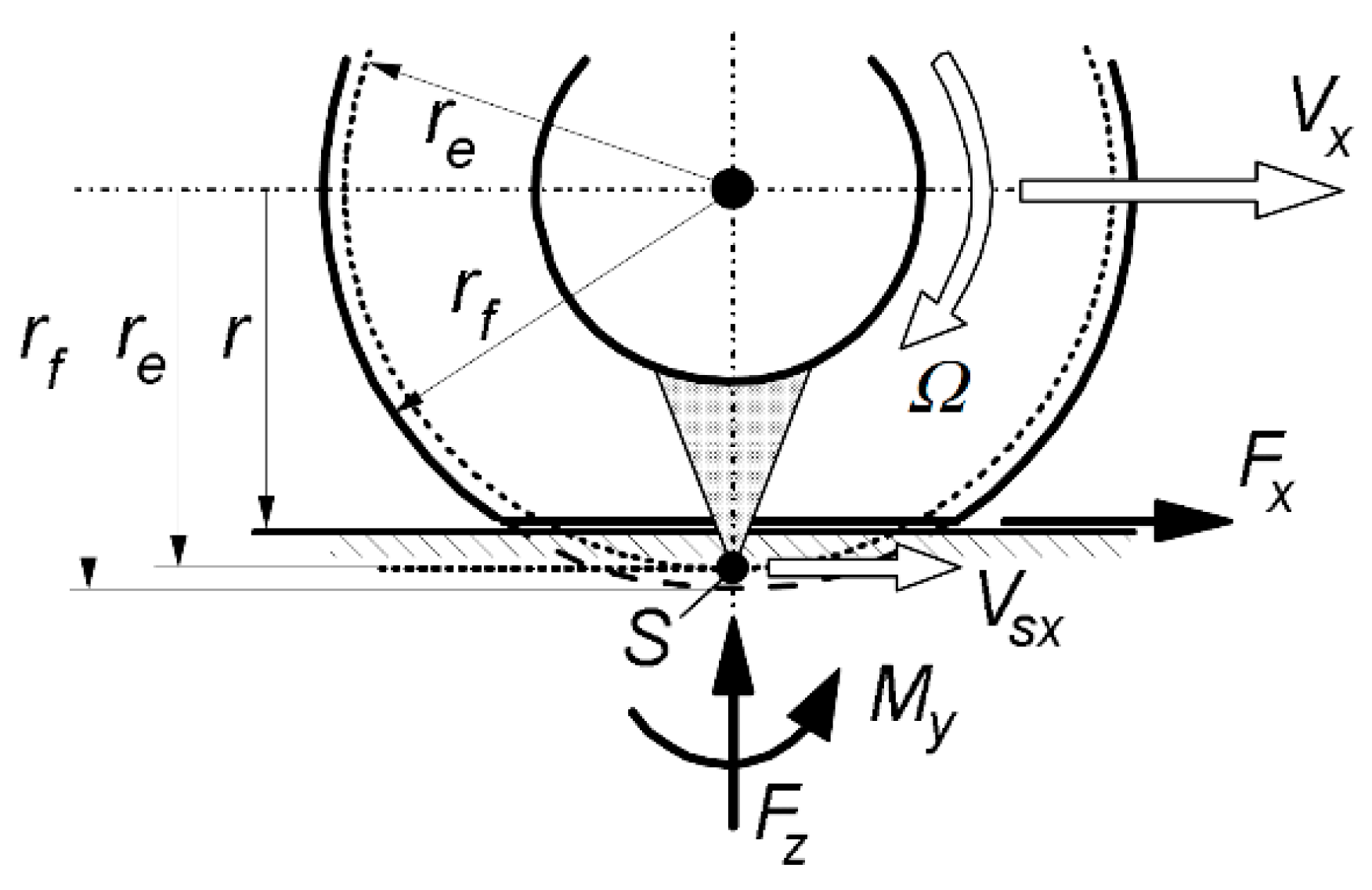
25]. When torque is applied to the wheel spin axis, the longitudinal slip κ arises. It can be defined as in Equation (15). The effective rolling radius (
re) is a value between the free unloaded tire radius (
rf) and the loaded tire radius (
r). Longitudinal slip is also defined in Equation (16) as the ratio between the circumferential slip velocity (
Vsx) and the forward speed of the wheel center (
Vx).
Figure 6 shows the wheel slip point S attached to the wheel rim. Point S’ is the tire’s contact point, located at the plane’s intersection through the wheel axis and the road plane. The difference in velocities between these two points causes the carcass’ equivalent springs to deflect. Thus, the rate of change in spring deflection for the longitudinal direction of the tire (
u) is defined in Equation (17).
The tire’s stiffness coefficient with the road level generated by the internal elastic force balances the slip forces. For small slip values, longitudinal tire stiffness at the road level can be denoted by (
CFx), and the longitudinal slip stiffness can be denoted by (
CFκ). Equation (18) reveals that
CFκ can be obtained from the longitudinal force (
FxW) versus the slip (
κ) curve slope at low slip values, as indicated in [
26].
As in Equation (19), this quantity can be approximated by multiplying the longitudinal Pacejka’s coefficients
Bx,
Cx, and
Dx. The relaxation length is a principal parameter that influences the lag of the response of the slip force to the input slip. Equation (20) expresses the longitudinal relaxation length (
σκ) under low slip conditions. The differential equation for the deflection
u can be derived from Equation (17).
The differential Equation (21) defines the relation between
u and
σκ. For linear and small slip conditions, it can be found that the transient longitudinal slip (
κ’) and the correspondence
FxW are determined according to Equation (22). The lateral forces will be neglected in this work. At velocity V
x equal or near zero, Equation (21) becomes an integrator. This occurrence could lead to a possibly huge deflection. Certain limitations may be achieved on the longitudinal deflection
u in the case of low speeds, i.e.,
Vx <
Vlow, and when (21) the deflection exceeds the physically possible values. The slip value at the peak longitudinal force can be roughly estimated using Equation (23) to avoid simulation problems. Factor
A has a default value of 1, but a higher value may improve the performance [
25]. Based on these results, the identification of
σκ as expressed in linear Equation (20) can be extended with nonlinear Equation (24).
σκ0,
σmin are, respectively, the nominal longitudinal relaxation length and the minimum value of the relaxation length introduced to avoid instability and excessive computation. By substituting Equation (22) into (21), the differential Equation (25) is attained.
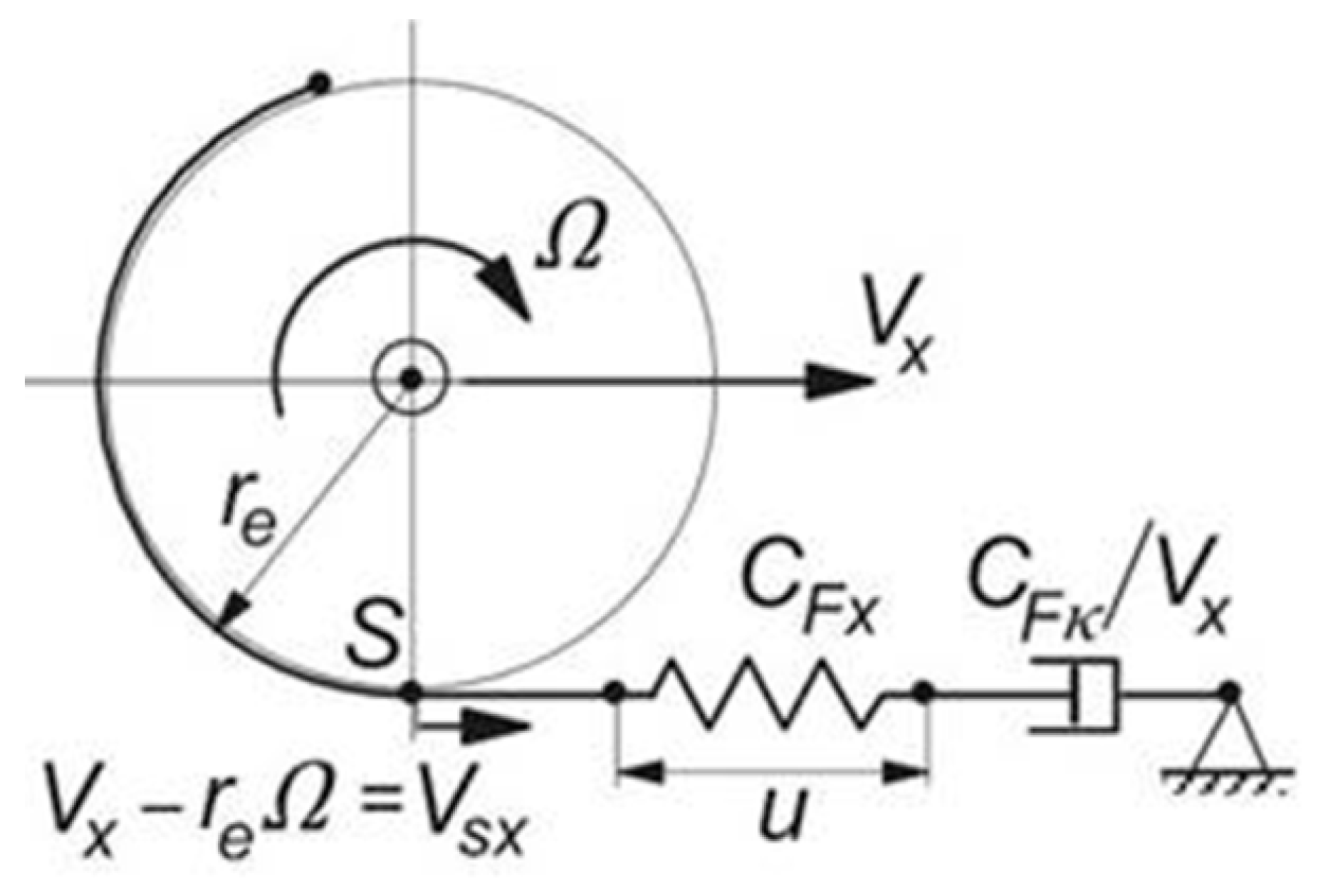
At the standstill, the tire acts like a spring, as shown in
Figure 7 [
27]. This fact can be concluded by verifying using the previously introduced Equation (17) at
Vx = 0 that the longitudinal deflection
u will act as an integrator
if the lateral deflection is neglected, i.e.,
V’sy = 0. The longitudinal force reads
, which is equal to
. These results show that when the tire starts rolling from the standstill, it behaves like a longitudinal or tangential spring and will transform into an artificial damper with a rate of
CFκ/|
Vx|. It shows that the tire damper becomes very stiff at a low speed. At full speed, the tire acts as a damper, while at low speeds, when the tire starts up from a standstill or slows down to a stop, the tire behaves more like a deformable spring, demonstrating a tire transient behavior with a spring-damper system. At very low speeds, the damping decreases when speed is built up. Tire damping is introduced in Equation (26). The damping coefficient
kVlow should be gradually suppressed to zero when the speed of travel
Vx approaches a selected low-value
Vlow when starting from standstill using Formula (27).
4. Integration of the Complete Vehicle Model
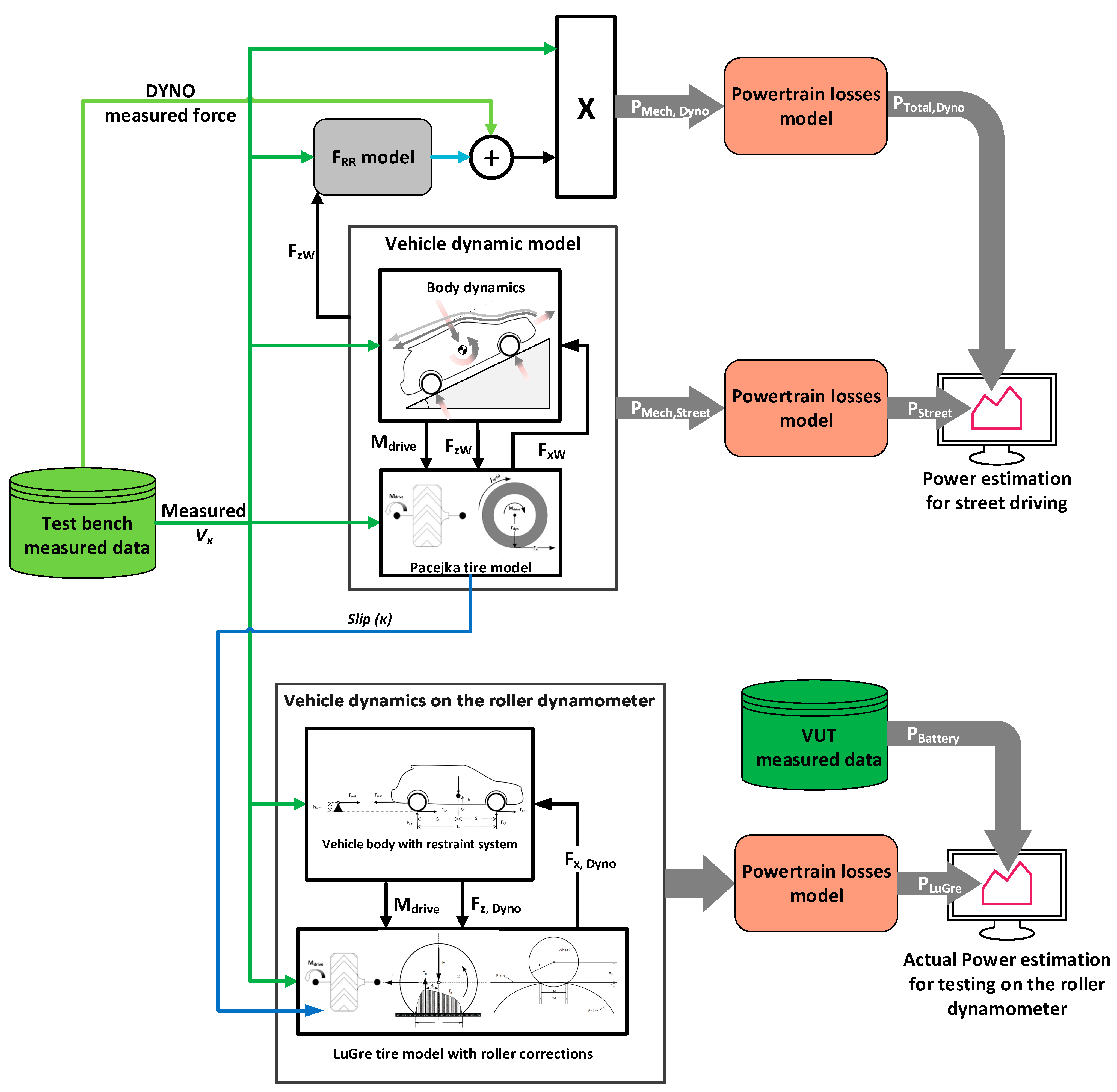
The method employed to estimate the wheel angular speed further improves the concepts developed in [
13], considering more detailed models of the driving resistance and the tire. Using only the vehicle’s desired longitudinal velocity (
Vx), the corresponding traction force (
FxW), calculated from the tire slip model, will take part in determining the angular speed for each wheel.
Figure 8 demonstrates the interaction between the driving movement on the wheel hub (
Mdrive,i), determined from Equation (5) of the driving resistance model, and the movement from
FxW multiplied by
re.
As in Equation (28), the rotational speed for the corresponding wheel (
ωi) is estimated by dividing by the wheel hub inertia (
JW), and
ωi is determined according to Equation (29) when the tire slip is taken into consideration. Then, the mechanical power (
Pmech) could be estimated according to Equation (30). The sign of the
Pmech decides whether the vehicle is driving or braking. In case of driving, the battery must provide an equivalent power that covers the
Pmech demands plus power losses (
Ploss) of the powertrain. Next, the battery current (
Ibatt) corresponds to each of the estimated mechanical power; the powertrain power losses and the corresponding battery voltage (
Vbatt) are estimated using Equation (31). The parameters employed in the test vehicle dynamic model are demonstrated in
Table 1.
The total cumulative energy consumption
E(
t) is calculated as integrating the total power over time, as shown in Equation (32). Equation (33) describes the instantaneous power at the time (
t). Since this work focuses on estimating the consumed energy, the regenerative functionality is disabled in the VUT. Therefore, the simulation models will not employ the relevant equations for regenerative braking and the generator mode of the car’s electric machine.
where:
Pins—Total powertrain’s power (electrical power at the battery);
Pmech—Mechanical power (mechanical power at the output of the motor–gearbox unit);
ηpe—Power electronics’ efficiency;
ηg—Gearbox efficiency;
ηmot—Motor efficiency;
x—Fraction of the motor’s mechanical power;
fnorm—Normalization factor;
Paux—Auxiliary power.
The wheel load (
FzW) is significant in calculating the contact patch forces. The location of the vehicle’s
CG plays a primary role in distributing the total vehicle weight
FG among the wheels. The geometrical distance from the
CG to the front axle (
Sf), the distance to the rear axle (
Sr), and the height of the center of gravity (
h) are shown in
Figure 9. The influence of the air drag lifting effect is not taken into consideration. The wheel loads on the front axle are obtained by creating the torque balance around the contact point of the rear axle tires. Analogously, the wheel loads of the rear axle are obtained by forming the movement equilibrium around the contact point of front axle [
28,
29].
Road inclination and vehicle acceleration cause a change in the axle load distribution, which makes the axles’ loads have static and dynamic parts. The static part for each front and rear axle is calculated using Equations (34) and (35). Wheel load is also affected by acceleration; so, acceleration force acts on the vehicle’s center of mass opposite the direction of acceleration. Consequently, the dynamic part of the axles’ vertical load [
24,
28] is as shown in Equations (36) and (37).
λ* is determined using Equation (8). Then, by summing the static terms in Equation (34) together with the dynamic terms (36) and by carrying out the same process for Equations (35) and (37), we obtain the total axle loads equations as expressed in Equations (38) and (39).
5. Generic Energy Consumption Model for the Electric Powertrain
The authors of [
30] proposed a computational model for energy consumption in EVs. They introduced a generic battery model based on technical data. The model’s accuracy is promoted by incorporating the technical specifications of electric machines, which are employed to generate efficiency curves for both motor and generator operation phases. In this work, the model proposed in [
30] will be improved by incorporating more detailed driving resistance and battery models.
Electric motors are generally designed to operate between 50 and 100% of their rated load, with the highest operating efficiency at roughly 75% of the full load. At the same time, the motor efficiency decreases severely at loads below 50%. The part-load efficiency curves are presented in
Figure 10 for typical electric motors with different rated power values [
30]. The motor efficiency can be estimated, according to [
30], as a function of the fraction (
x) of the mechanical output power of the motor (
Pmo) in W concerning the rated motor power (
Pmr) in kW, i.e., x = 0.001|
Pmo|/
Pmr. Equation (40) describes the generalized electrical machine efficiency for either motor mode (
ηmot) or generator mode (
ηgen).
The coefficients in Equation (40) are acquired in [
30] from the curve fitting of several motors and are presented in
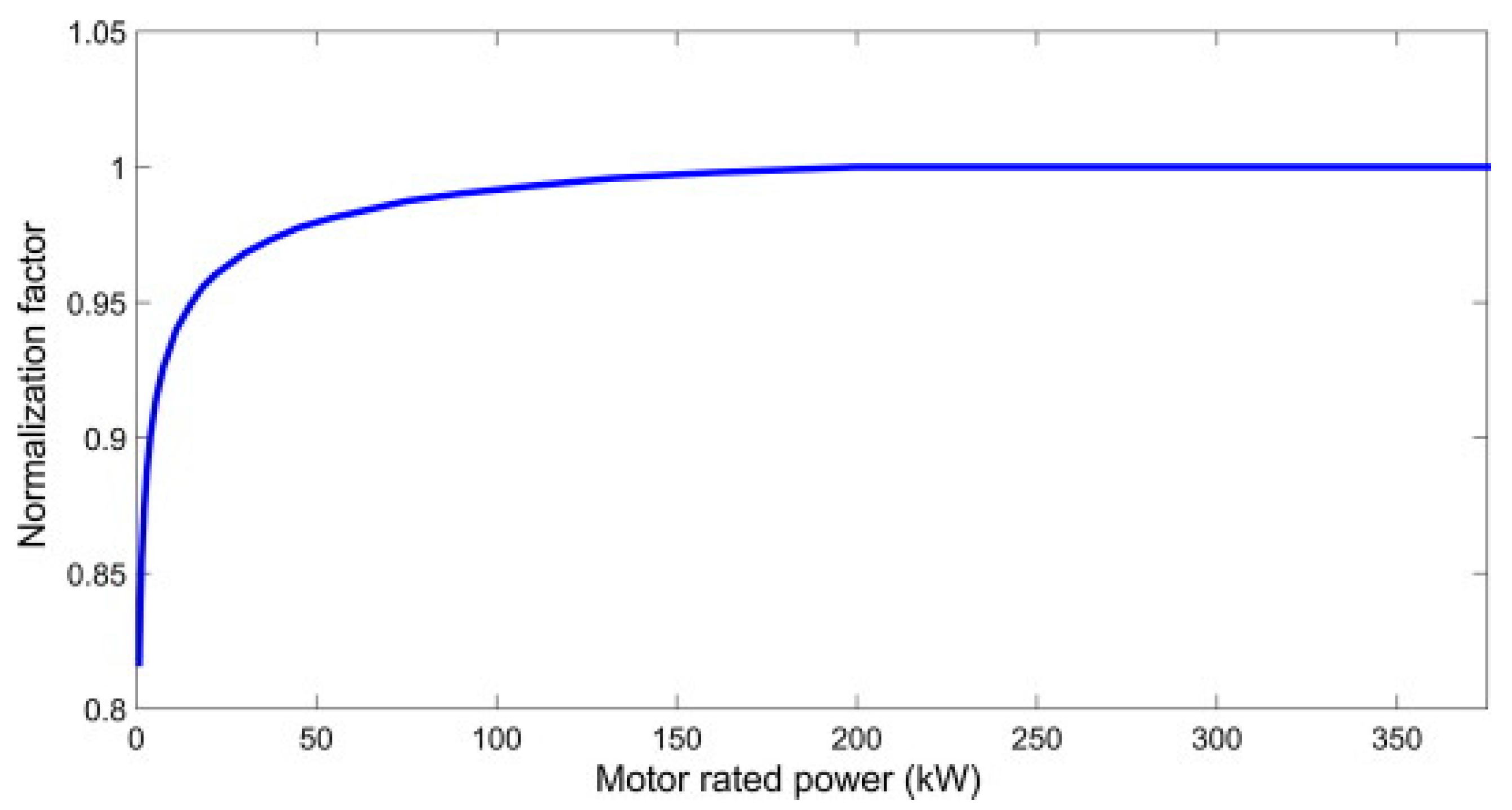
Table 2. One of the electrical machines’ main characteristics is that their efficiency increases with size [
31]. Therefore, when calculating the efficiency for an electrical machine with specific output power, the efficiency must first be attained from Equation (40), then multiplied by a normalization factor (
fnorm). While in the case of regenerative braking, the efficiency must be multiplied by a regenerative normalization factor (
fregen), as explained in [
30].
Figure 11 displays the efficiency normalization factor based on rated output power.
The mechanical energy losses from the total gears transmission efficiency (
ηg) are also significant [
32]. Therefore, the authors of [
33] also developed an energy consumption model for EVs with a deceleration-dependent regenerative braking efficiency model. They validated their model with different electric vehicles over several typical driving cycles. In addition, they analyzed the impact of auxiliary systems load on energy consumption by performing the simulation at three different ambient temperatures. Accordingly, the total battery output should also supply the auxiliary load power (
Paux) and supply the power for the motor or to receive the electrical power from the generator. In [
34], the power model is multiplied by a correction factor constant to consider the drop in battery efficiency during the round trip, while in this work, a detailed battery model, introduced in the following section, is employed as the proposed battery model incorporates more variable loss factors. The front-wheel-driven VUT has an asynchronous machine; its specifications are listed in
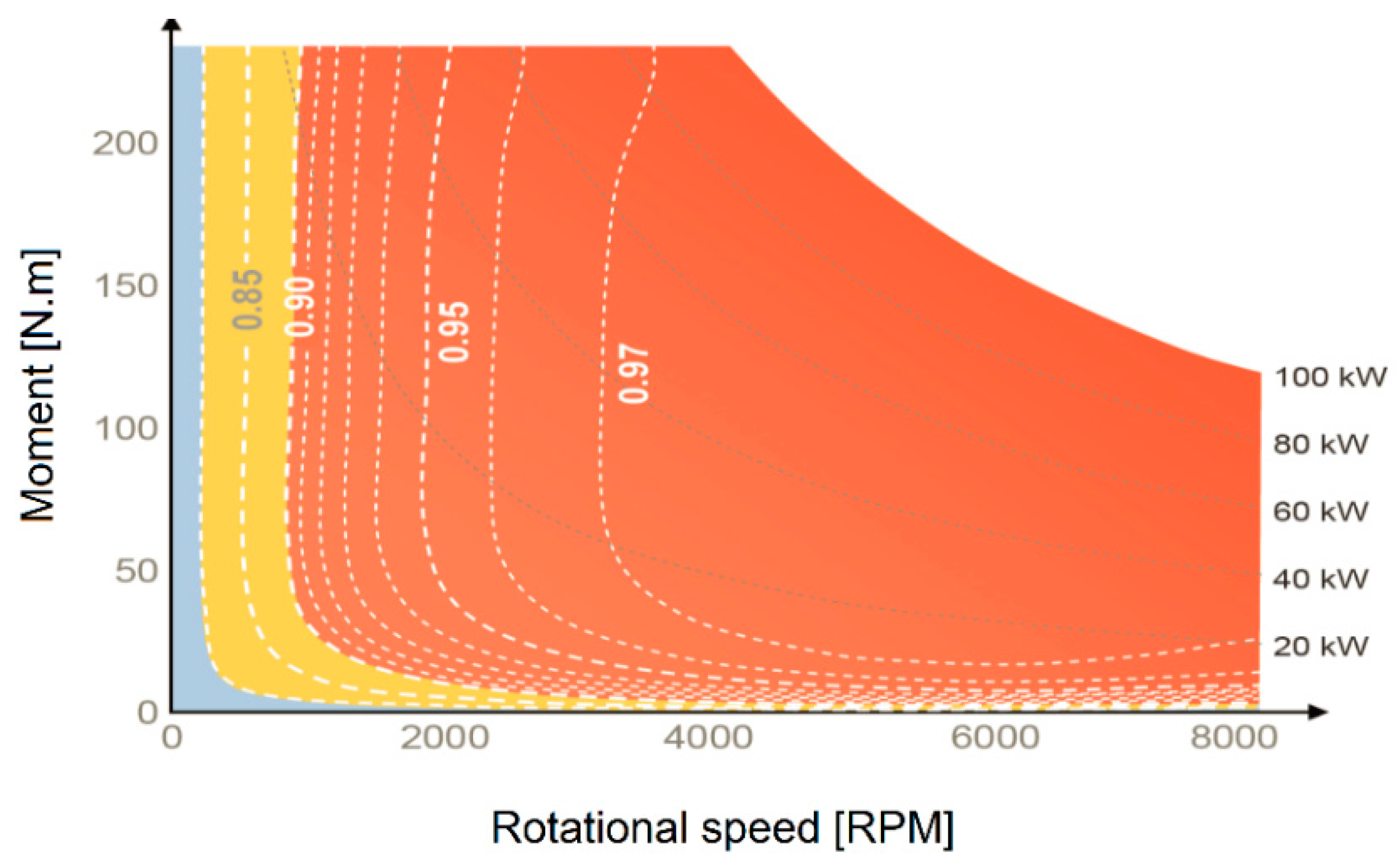
Table 3. The losses within the power electronics components occur due to converting the direct current from the battery into a three-phase current to the motor. Therefore, the efficiency characteristics of the power electronics (
ηpe) can be mapped via an efficiency map analogous to the map of the electric machine, as shown in
Figure 12. The data in this figure are determined for a motor with a maximum power of 100 kW. However, the efficiency of power electronics for a powertrain with lower motor power can also be estimated from
Figure 12 [
35]. Each dashed line expresses the same efficiency of all points spreading on it. The red zone demonstrates the high-efficiency working points, followed by the yellow area, and finally comes the lowest efficiency, represented by the light-blue zone.
Figure 11.
Normalization factor (
fnorm) curve [
34].
Figure 11.
Normalization factor (
fnorm) curve [
34].
9. Conclusions
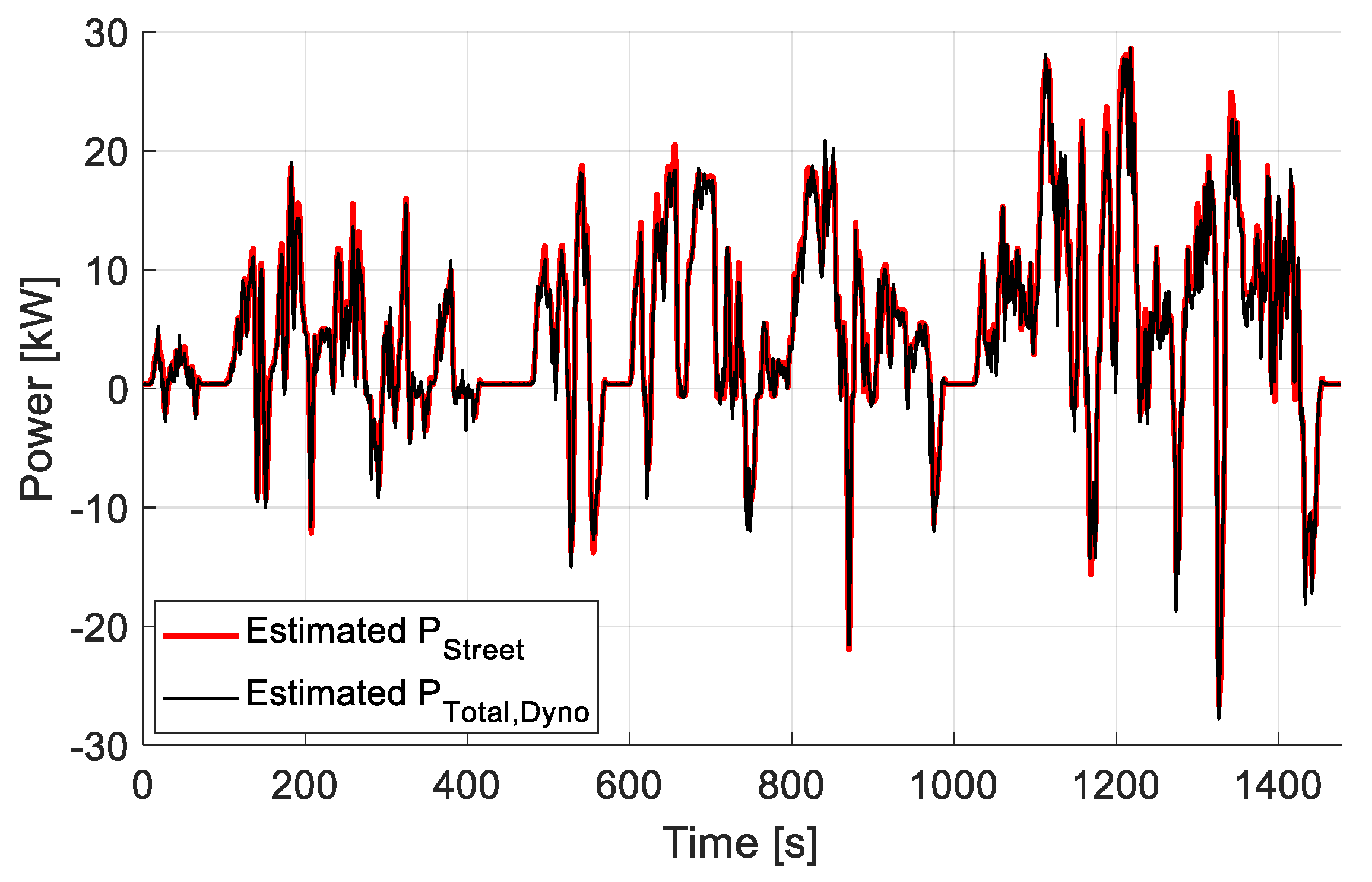
The capacities of the chassis dynamometer test benches as a testing environment are investigated in this work. An intensive literature review for the state of the art is carried out with an emphasis on the limitations of testing using chassis dynamometers. This work contributes to two central points: First, analytical and experiment evaluations are performed systematically in this research by creating detailed simulation models and evaluating the results based on experimental measurements. The analysis shows that chassis dynamometers suit dynamic driving maneuvers under certain conditions. In particular, the more the test incorporates dynamic driving maneuvers, the higher the errors in the roller test bench results. The results revealed that testing on the roller dynamometers produces higher energy consumption than testing on a flat surface, confirming the literature review’s observations. Even though the NEDC has a higher maximum speed than the WLTP2 driving cycle, a more significant difference between the measured and expected results occurs in the WLTP2 case since it is more dynamic. In order to better simulate the tire’s dynamic behavior on the roller, the implemented LuGre friction model has two different sets of equations with different parametrization: one for the driving mode, and the other one for the braking mode. The modifications to the uniform load LuGre friction model, which is the second central point of this work, are summarized in three key contributions: First, it was modified to be adapted to the roller dynamometer test bench by adjusting the contact patch length to the concaved roller radius according to the ETRTO -standards and optimized correction factors for roller test benches. Second, the vertical load on the axles, influenced by the restraint system, is considered. Third, the nonlinear slip estimation from the Pacejka tire model is implemented instead of the simplified slip definition in the LuGure model, considering splitting the Pacejka slip signal between driving and braking slip signals. The proposed LuGre tire model is integrated with a larger-scale physical generic power consumption model. The proposed model comprises a dynamic physical model for the mounted vehicle on the chassis dynamometer, a driving resistance model, a power loss model of the electric powertrain, a LuGre distributed friction tire model which considers the load distribution on the contact patch length between the tire and the ground, and a correction for the contact patch length between the wheel and the roller. Given only the measured speed of the test cycle and the corresponding auxiliary power consumption, the proposed model demonstrates high accuracy in estimating the actual measured power. Nevertheless, some different potential sources of errors still exist due to the curvature geometry of the roller, which has several influences, such as increasing the tire’s rolling resistance force compared to driving on a flat surface. Furthermore, inaccurately estimating the vehicle’s speed leads to errors in tire slip estimation, influencing the final power estimation results. Another source of dissimilarities in results is the slipping between the tire and the roller, which is a major source of uncertainty that diminishes the accuracy of estimating the energy consumption in the roller dynamometer test benches. The influences of these divergences can only be predicted with a more advanced measurement apparatus that provides the necessary information.
This research established a comprehensive basis for future work: implementing this approach for other types of vehicles, such as buses and trucks. Moreover, the proposed model can be extended by considering the regenerative braking system and investigating its influence on the braking time. Furthermore, this method could be employed to estimate energy consumption for other powertrain types: internal combustion engines, fuel cells, and hybrid powertrains. In addition, a methodology to mitigate the investigated limitations of the roller test bench, such as advanced calibration techniques or integrating additional sensors, could be proposed. Also, this method could be used in real-world driving scenarios by incorporating a three-dimensional route profile and different driving resistances on the tires, and, finally, modeling the auxiliary power instead of relying on the measurements for every new test maneuver or test conditions.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}