
A Neural Network-Based Method for Real-Time Inversion of Nonlinear Heat Transfer Problems

Abstract
:1. Introduction
2. Physical Model
3. NARX Neural Network for Boundary Heat Flux Estimation
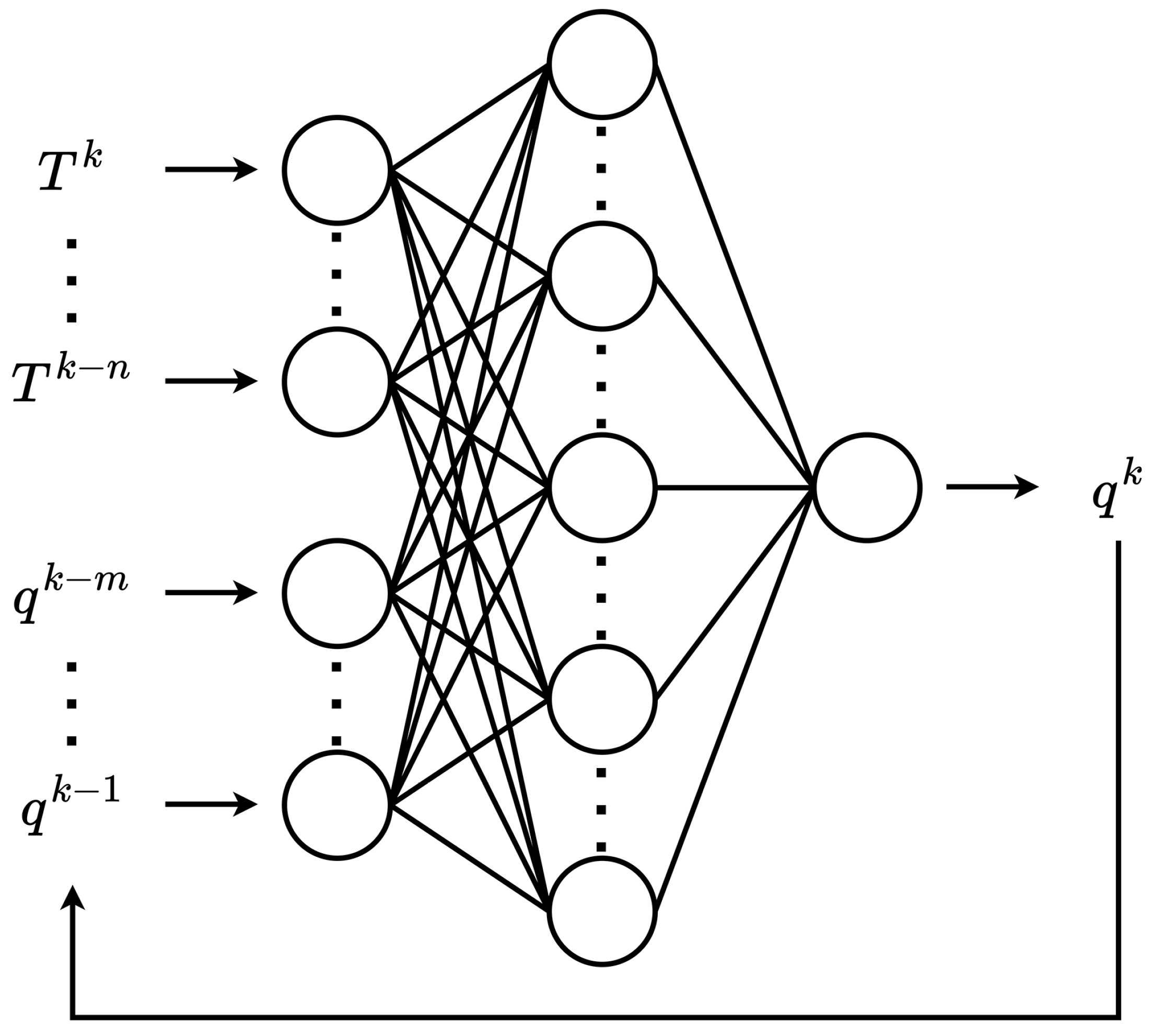
3.1. Mapping the NARX Neural Network Structure
3.2. Network Training
3.3. The Estimation Procedure
- (1)
- Train the NARX neural network with the training dataset, which consists of accurate heat flux and temperature data measured in experiments.
- (2)
- Provide the trained neural network with the initial input values, x0.
- (3)
- Calculated the initial output value of heat flux, q0, using Equations (10) and (11). Set k = 1.
- (4)
- Combine the historical outputs of heat flux obtained by the network and the time series of temperature measurements to form the inputs of the network, xk.
- (5)
- Calculated the output value of heat flux, qk by Equations (10) and (11).
- (6)
- If k equals the number of time steps that need to be inverted, stop this procedure, otherwise, set k = k + 1 and return to Step (4).
4. Results and Discussion
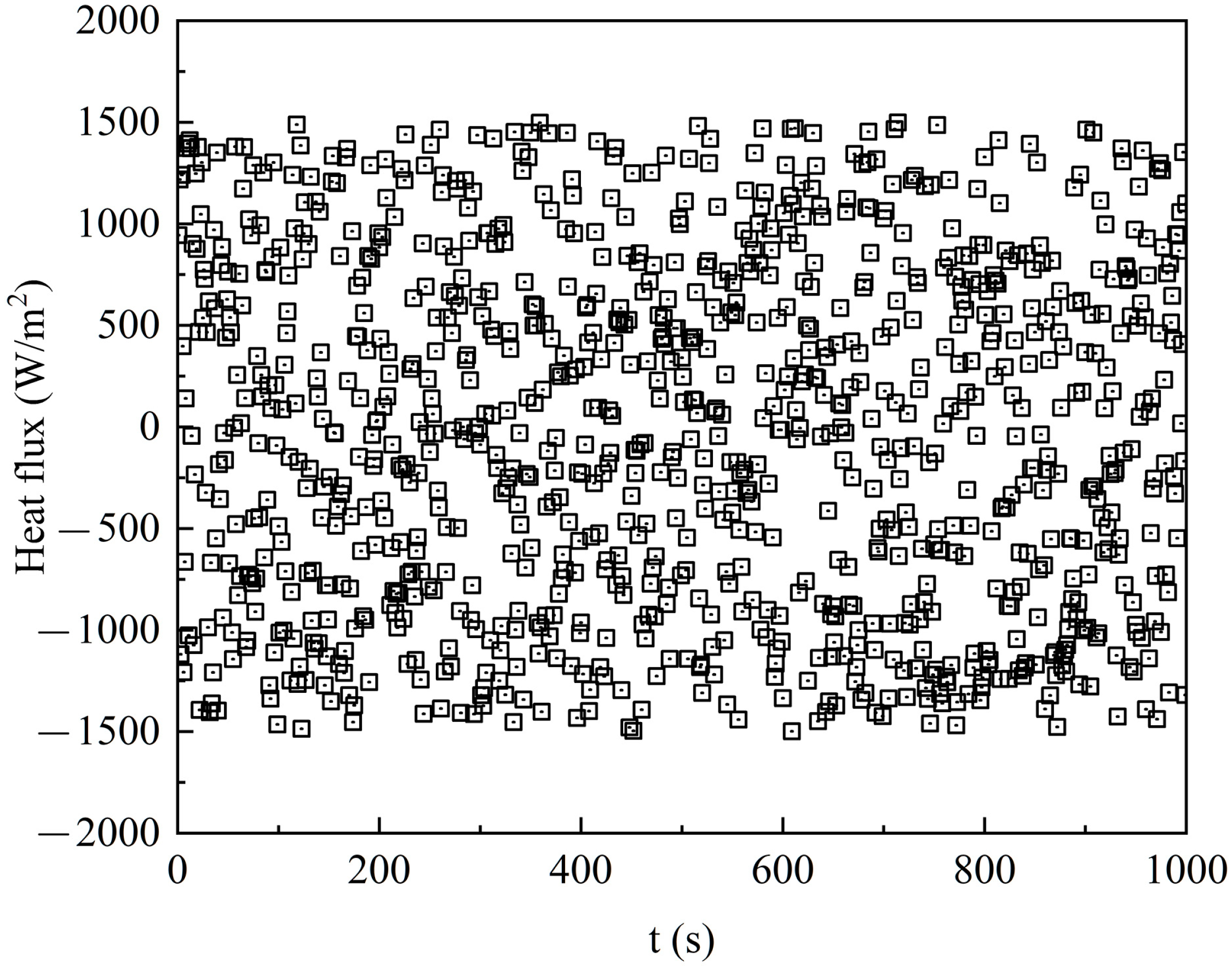
4.1. Simulation Experiment Conditions
4.2. Verification of the NARX Method
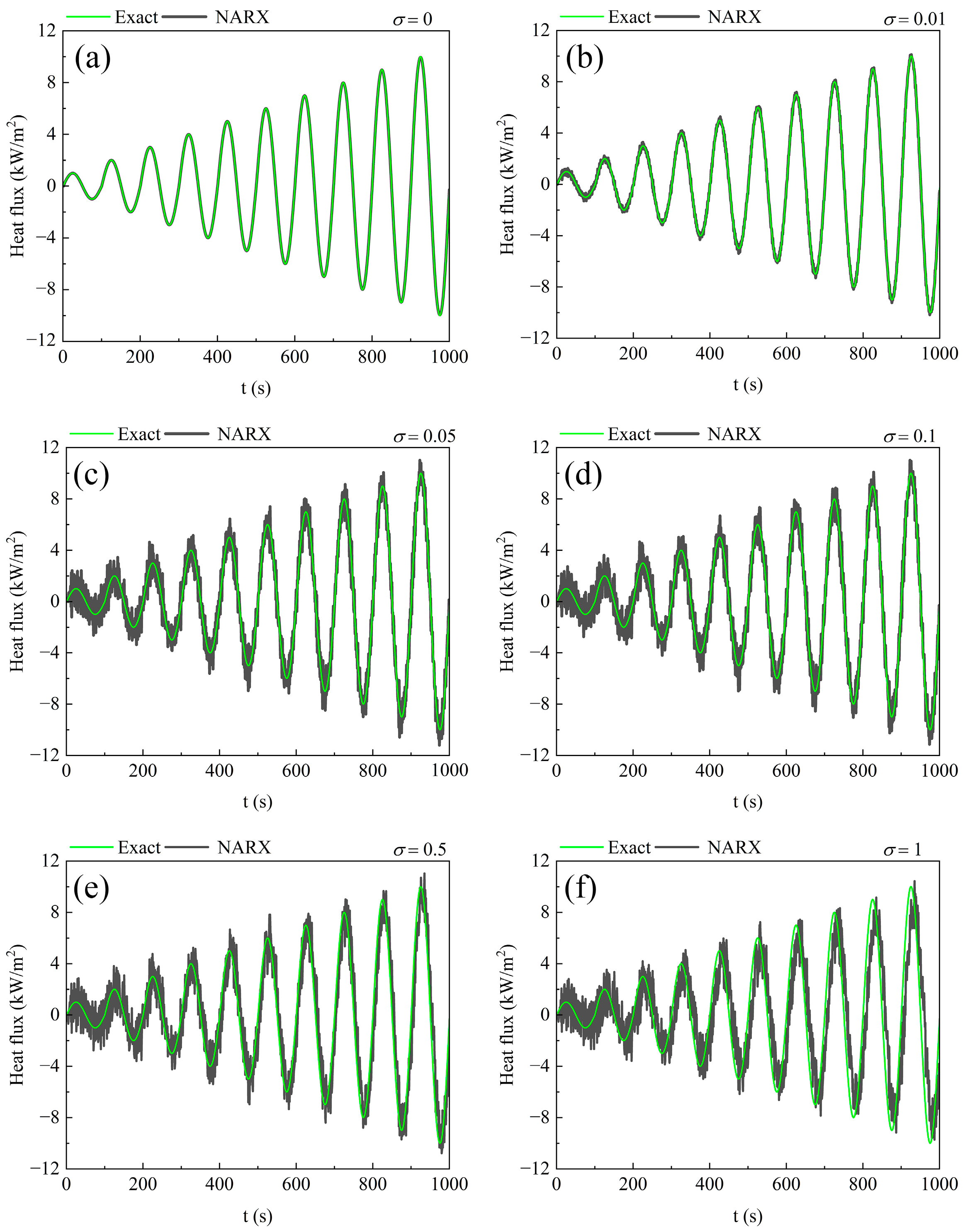
4.3. Influence of Temperature Measurement Noise
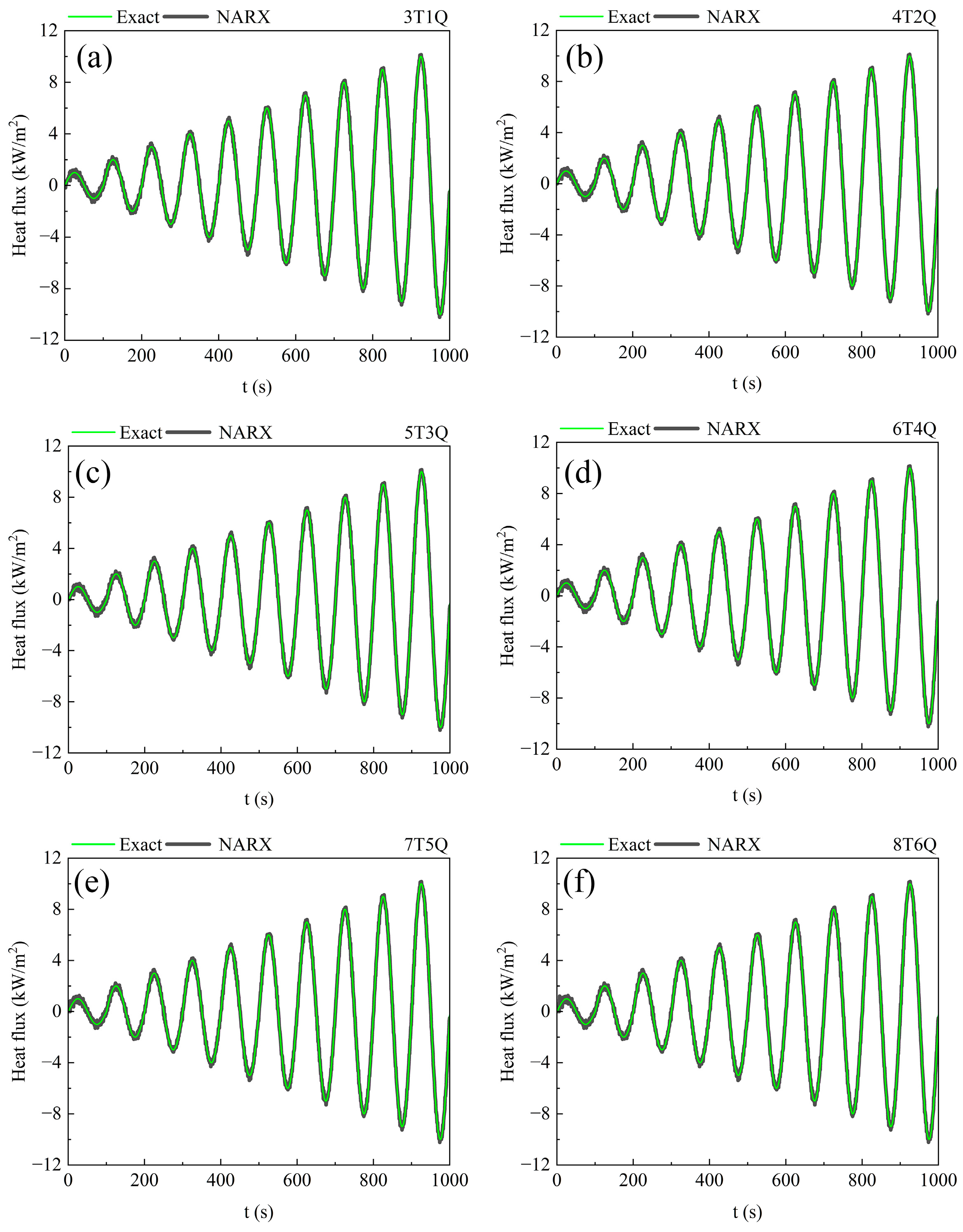
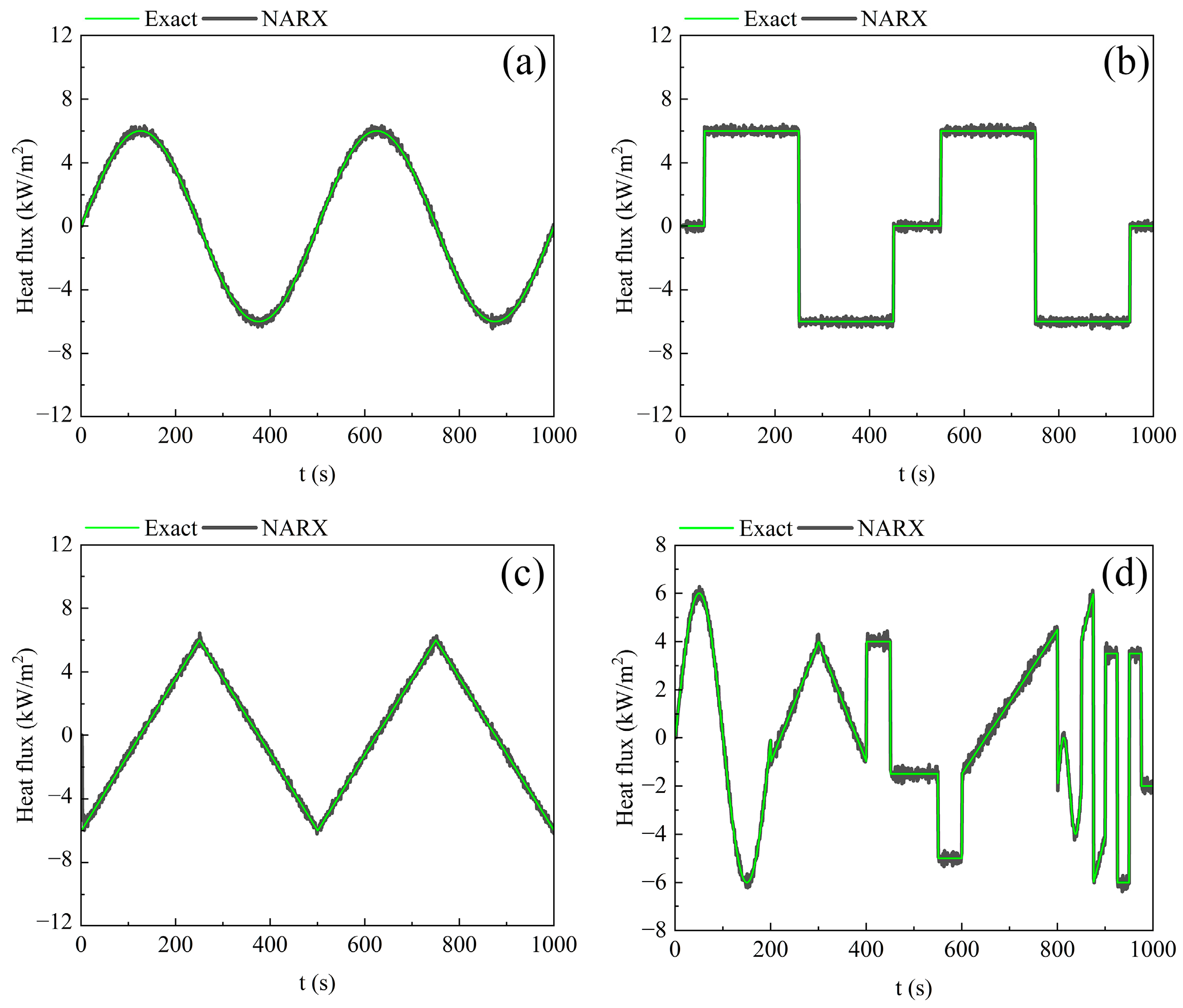
4.4. Influence of Heat Flux Form
5. Conclusions
- (1)
- With the introduction of the NARX neural network and its unique characteristics, the NARX method can achieve real-time estimation of boundary heat flux using only surface temperature data as inputs.
- (2)
- The NARX neural network can fit any nonlinear relationship, so the NARX method can use known data for training when system state equations are unknown, thereby deriving an approximate relationship between the time series of surface temperature and the boundary heat flux.
- (3)
- The NARX method exhibits strong noise resistance. When the temperature measurement error reaches 1 K, the inversion result maintains a certain level of accuracy, with a relative error of only 56.45%.
- (4)
- The NARX method demonstrates high applicability and robustness. It can accurately inverse heat flux across a wide range of magnitudes and change rates and can also estimate the boundary heat flux of various shapes.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Abbas, N.; Ali, M.; Shatanawi, W. Chemical reactive second-grade nanofluid flow past an exponential curved stretching surface: Numerically. Int. J. Mod. Phys. B 2023. [Google Scholar] [CrossRef]
- Abbas, N.; Shaheen, A.; Shatanawi, W. Simulation of mixed convection flow for a physiological breakdown of Jeffrey six-constant fluid model with convective boundary condition. Int. J. Mod. Phys. B 2022, 37. [Google Scholar] [CrossRef]
- Cole, K.; Beck, J.; Haji-Sheikh, A.; Litkouhi, B. Heat Conduction Using Greens Functions; Taylor & Francis: Abingdon, UK, 2010. [Google Scholar]
- Sun, W.; Qu, W.; Gu, Y.; Li, P.-W. An arbitrary order numerical framework for transient heat conduction problems. Int. J. Heat Mass Transf. 2024, 218, 124798. [Google Scholar] [CrossRef]
- Duda, P.; Taler, J. A new method for identification of thermal boundary conditions in water-wall tubes of boiler furnaces. Int. J. Heat Mass Transf. 2009, 52, 1517–1524. [Google Scholar] [CrossRef]
- Lv, C.; Wang, G.; Chen, H. Estimation of time-dependent thermal boundary conditions and online reconstruction of transient temperature field for boiler membrane water wall. Int. J. Heat Mass Transf. 2020, 147, 118955. [Google Scholar] [CrossRef]
- Nakamura, T.; Kamimura, Y.; Igawa, H.; Morino, Y. Inverse analysis for transient thermal load identification and application to aerodynamic heating on atmospheric reentry capsule. Aerosp. Sci. Technol. 2014, 38, 48–55. [Google Scholar] [CrossRef]
- Duda, P. A method for transient thermal load estimation and its application to identification of aerodynamic heating on atmospheric reentry capsule. Aerosp. Sci. Technol. 2016, 51, 26–33. [Google Scholar] [CrossRef]
- Uyanna, O.; Najafi, H.; Rajendra, B. An inverse method for real-time estimation of aerothermal heating for thermal protection systems of space vehicles. Int. J. Heat Mass Transf. 2021, 177, 121482. [Google Scholar] [CrossRef]
- Hong, Y.; Ma, Y.; Wen, S.; Sun, Z. A reconstructed approach for online prediction of transient heat flux and interior temperature distribution in thermal protect system. Int. Commun. Heat Mass Transf. 2023, 148, 107055. [Google Scholar] [CrossRef]
- Wen, S.; Ma, Y.; Zhou, T.; Sun, Z. Real-time estimation of thermal boundary conditions and internal temperature fields for thermal protection system of aerospace vehicle via temperature sequence. Int. Commun. Heat Mass Transf. 2023, 142, 106618. [Google Scholar] [CrossRef]
- Kondo, S.; Okada, Y.; Iseki, H.; Hori, T.; Takakura, K.; Kobayashi, A.; Nagata, H. Thermological study of drilling bone tissue with a high-speed drill. Neurosurgery 2000, 46, 1162–1168. [Google Scholar] [CrossRef] [PubMed]
- Lv, C.; Wang, G.; Chen, H. Inverse determination of thermal boundary condition and temperature distribution of workpiece during drilling process. Measurement 2021, 171, 108822. [Google Scholar] [CrossRef]
- Torres, V.D.Z.; Vaz, M.A.; Cyrino, J.C.R. Estimation of distributed heat flux parameters in localized heating processes. Int. J. Therm. Sci. 2021, 163, 106808. [Google Scholar] [CrossRef]
- Cuadrado, D.; Marconnet, A.; Paniagua, G. Non-linear Non-Iterative transient inverse conjugate heat transfer method applied to microelectronics. Int. J. Heat Mass Transf. 2020, 152, 119503. [Google Scholar] [CrossRef]
- Krane, P.; Cuadrado, D.G.; Lozano, F.; Paniagua, G.; Marconnet, A. Sensitivity Coefficient-Based Inverse Heat Conduction Method for Identifying Hot Spots in Electronics Packages: A Comparison of Grid-Refinement Methods. J. Electron. Packag. 2022, 144, 011008. [Google Scholar] [CrossRef]
- Gonzalez-Hernandez, J.-L.; Recinella, A.N.; Kandlikar, S.G.; Dabydeen, D.; Medeiros, L.; Phatak, P. An inverse heat transfer approach for patient-specific breast cancer detection and tumor localization using surface thermal images in the prone position. Infrared Phys. Technol. 2020, 105, 103202. [Google Scholar] [CrossRef]
- Woodbury, K.A.; Najafi, H.; Monte, F.D.; Beck, J.V. Inverse Heat Conduction: Ill-Posed Problems; Wiley Blackwell: Hoboken, NJ, USA, 2023; pp. 1–352. [Google Scholar]
- Tikhonov, A.N.; Arsenin, V.J.; Arsenin, V.I.A.k.; Arsenin, V.Y. Solutions of Ill-Posed Problems; Vh Winston: Huntington, WV, USA, 1977. [Google Scholar]
- Okamoto, K.; Li, B. A regularization method for the inverse design of solidification processes with natural convection. Int. J. Heat Mass Transf. 2007, 50, 4409–4423. [Google Scholar] [CrossRef]
- Huang, C.-H.; Lo, H.-C. A three-dimensional inverse problem in estimating the internal heat flux of housing for high speed motors. Appl. Therm. Eng. 2006, 26, 1515–1529. [Google Scholar] [CrossRef]
- Cui, M.; Duan, W.-W.; Gao, X.-W. A new inverse analysis method based on a relaxation factor optimization technique for solving transient nonlinear inverse heat conduction problems. Int. J. Heat Mass Transf. 2015, 90, 491–498. [Google Scholar] [CrossRef]
- Beck, J.V.; Blackwell, B.; Clair, C.R.S., Jr. Inverse Heat Conduction: Ill-Posed Problems; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1985. [Google Scholar]
- Najafi, H.; Woodbury, K.A.; Beck, J.V. A filter based solution for inverse heat conduction problems in multi-layer mediums. Int. J. Heat Mass Transf. 2015, 83, 710–720. [Google Scholar] [CrossRef]
- Wan, S.; Xu, P.; Wang, K.; Yang, J.; Li, S. Real-time estimation of thermal boundary of unsteady heat conduction system using PID algorithm. Int. J. Therm. Sci. 2020, 153, 106395. [Google Scholar] [CrossRef]
- Huang, W.; Li, J.; Liu, D. Real-Time Solution of Unsteady Inverse Heat Conduction Problem Based on Parameter-Adaptive PID with Improved Whale Optimization Algorithm. Energies 2022, 16, 225. [Google Scholar] [CrossRef]
- Mohammadiun, M.; Molavi, H.; Bahrami, H.R.T.; Mohammadiun, H. Application of sequential function specification method in heat flux monitoring of receding solid surfaces. Heat Transf. Eng. 2014, 35, 933–941. [Google Scholar] [CrossRef]
- Deng, S.; Hwang, Y. Applying neural networks to the solution of forward and inverse heat conduction problems. Int. J. Heat Mass Transf. 2006, 49, 4732–4750. [Google Scholar] [CrossRef]
- Najafi, H.; Woodbury, K.A. Online heat flux estimation using artificial neural network as a digital filter approach. Int. J. Heat Mass Transf. 2015, 91, 808–817. [Google Scholar] [CrossRef]
- Löhner, R.; Antil, H.; Tamaddon-Jahromi, H.; Chakshu, N.K.; Nithiarasu, P. Deep learning or interpolation for inverse modelling of heat and fluid flow problems? Int. J. Numer. Methods Heat Fluid Flow 2021, 31, 3036–3046. [Google Scholar]
- Wan, S.; Wang, K.; Xu, P.; Huang, Y. Numerical and experimental verification of the single neural adaptive PID real-time inverse method for solving inverse heat conduction problems. Int. J. Heat Mass Transf. 2022, 189, 122657. [Google Scholar] [CrossRef]
- Holman, J.P. Heat Transfer; McGraw Hill: New York, NY, USA, 1986. [Google Scholar]
- Incropera, F.P.; DeWitt, D.P.; Bergman, T.L.; Lavine, A.S. Fundamentals of Heat and Mass Transfer; Wiley: New York, NY, USA, 1996; Volume 6. [Google Scholar]
- Faghri, A.; Zhang, Y.; Howell, J.R. Advanced Heat and Mass Transfer; Global Digital Press: Columbia, MO, USA, 2010. [Google Scholar]
- Ranganathan, A. The levenberg-marquardt algorithm. Tutoral LM Algorithm 2004, 11, 101–110. [Google Scholar]
- MacKay, D.J. Bayesian interpolation. Neural Comput. 1992, 4, 415–447. [Google Scholar] [CrossRef]
- Figliola, R.S.; Beasley, D.E. Theory and Design for Mechanical Measurements; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| T (K) | ρ (kg/m3) | cp (kJ/kg) | λ (W/m∙K) |
|---|---|---|---|
| 100 | 9009 | 0.254 | 480 |
| 150 | 8992 | 0.323 | 429 |
| 200 | 8973 | 0.357 | 413 |
| 250 | 8951 | 0.377 | 406 |
| 300 | 8930 | 0.386 | 401 |
| 400 | 8884 | 0.396 | 393 |
| 600 | 8787 | 0.431 | 379 |
| 800 | 8642 | 0.448 | 366 |
| 1000 | 8568 | 0.446 | 352 |
| 1200 | 8548 | 0.480 | 339 |
| NARX Inputs | Sq (W/m2) | ηq,ave |
|---|---|---|
| 3T1Q | 183.59 | 4.18% |
| 4T2Q | 182.60 | 4.16% |
| 5T3Q | 183.22 | 4.17% |
| 6T4Q | 183.57 | 4.18% |
| 7T5Q | 184.25 | 4.20% |
| 8T6Q | 185.85 | 4.23% |
| σ | Sq (W/m2) | ηq,ave |
|---|---|---|
| 0 | 9.88 | 0.23% |
| 0.01 | 182.60 | 4.16% |
| 0.05 | 911.49 | 20.77% |
| 0.1 | 936.12 | 21.33% |
| 0.5 | 1639.33 | 37.35% |
| 1 | 2477.38 | 56.45% |
| Heat Flux | Sq (W/m2) | ηq,ave |
| Sin | 184.27 | 4.34% |
| Square | 183.27 | 3.41% |
| Triangle | 187.31 | 5.40% |
| Combination Waveform | 184.05 | 5.55% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.; Pan, Z. A Neural Network-Based Method for Real-Time Inversion of Nonlinear Heat Transfer Problems. Energies 2023, 16, 7819. https://doi.org/10.3390/en16237819
Chen C, Pan Z. A Neural Network-Based Method for Real-Time Inversion of Nonlinear Heat Transfer Problems. Energies. 2023; 16(23):7819. https://doi.org/10.3390/en16237819
Chicago/Turabian StyleChen, Changxu, and Zhenhai Pan. 2023. "A Neural Network-Based Method for Real-Time Inversion of Nonlinear Heat Transfer Problems" Energies 16, no. 23: 7819. https://doi.org/10.3390/en16237819
APA StyleChen, C., & Pan, Z. (2023). A Neural Network-Based Method for Real-Time Inversion of Nonlinear Heat Transfer Problems. Energies, 16(23), 7819. https://doi.org/10.3390/en16237819