


A Dynamic Nonlinear VDCOL Control Strategy Based on the Taylor Expansion of DC Voltages for Suppressing the Subsequent Commutation Failure in HVDC Transmission


Abstract
:1. Introduction
2. The Commutation Failure and VDCOL Control
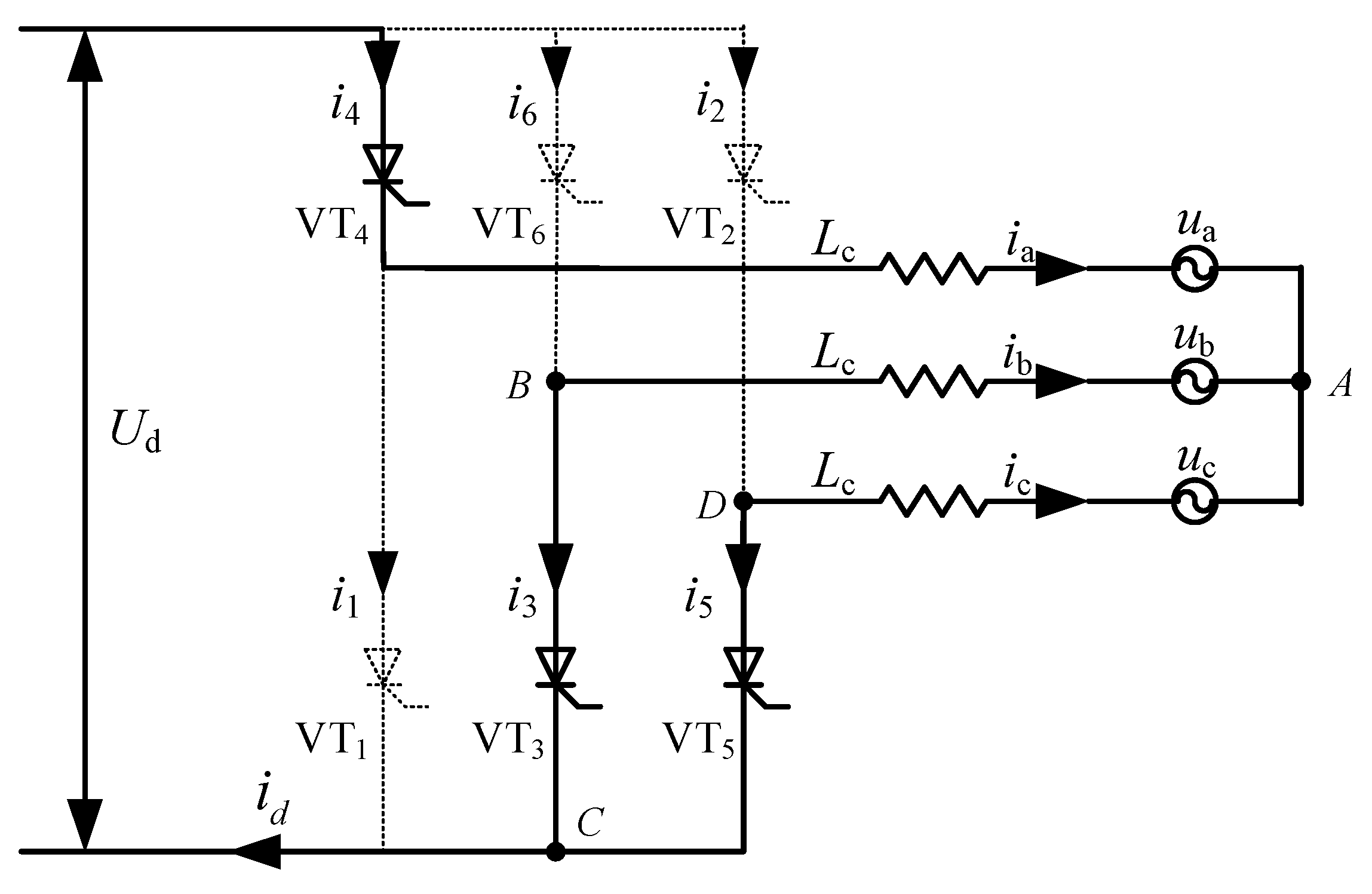
2.1. Analysis of the Commutation Failure
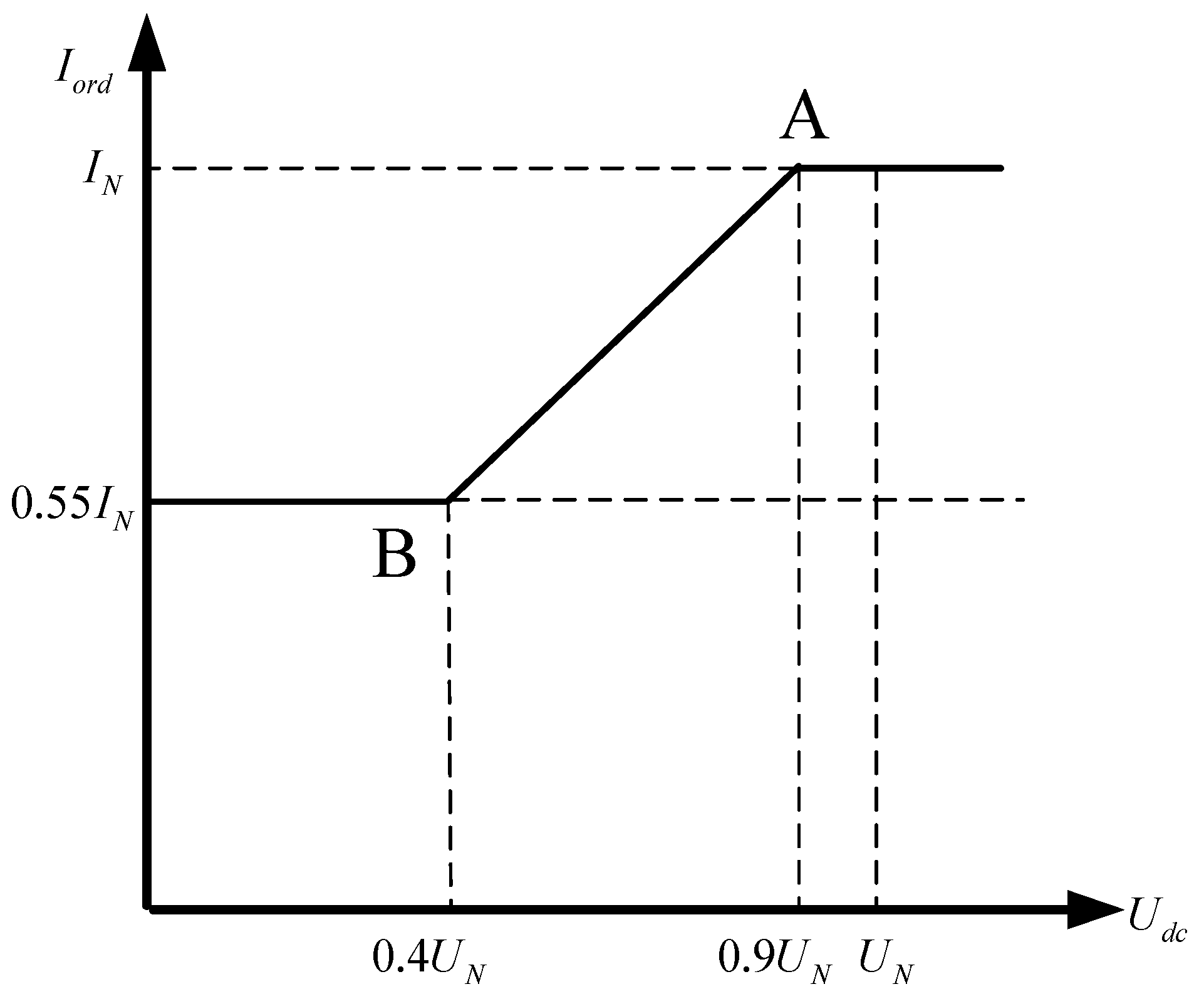
2.2. VDCOL and the Commutation Failures
3. DC Voltage Compensation Based on Taylor’s Equation
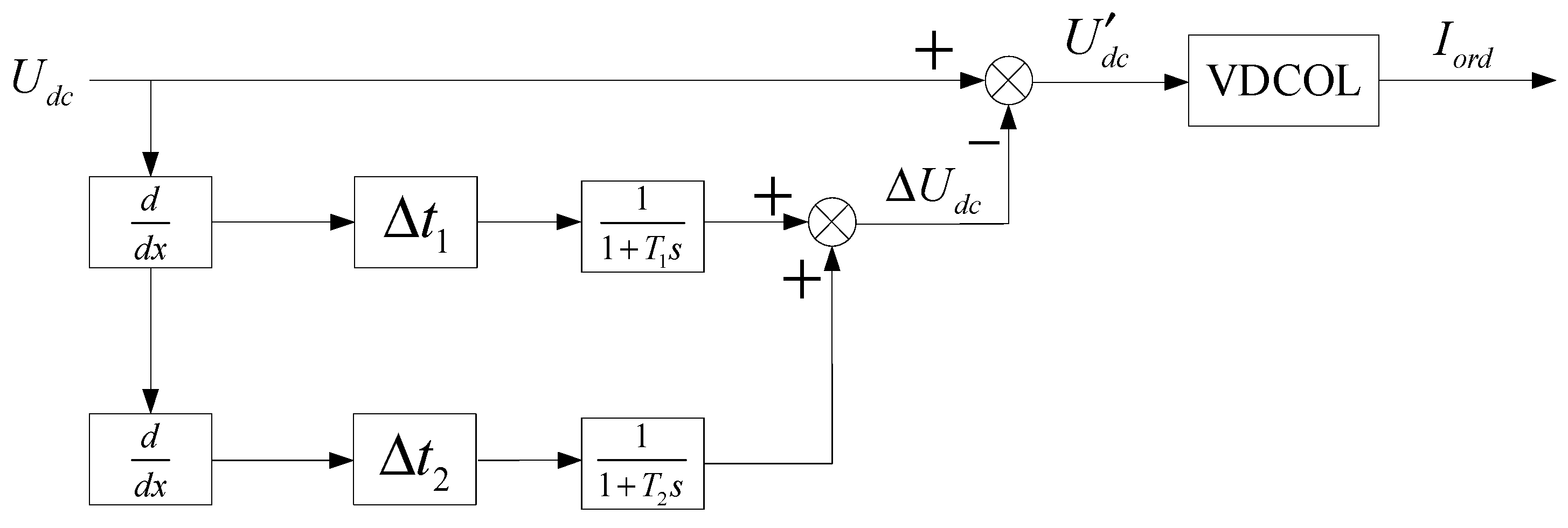
3.1. Compensation Based on the Change of DC Voltage
3.2. Predictive Parameters Analyzed and Determined
3.3. Correction Parameters Analyzed and Determined
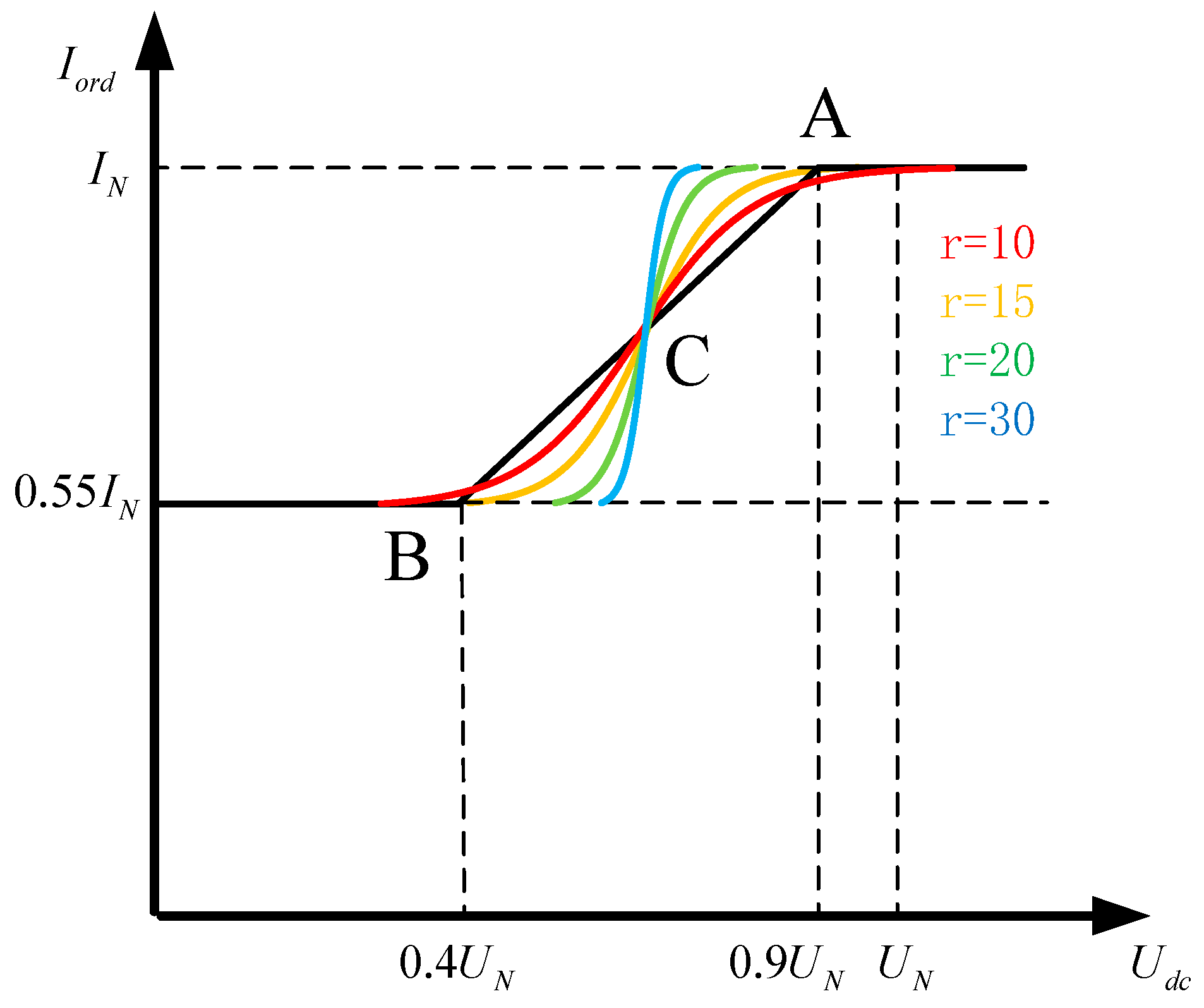
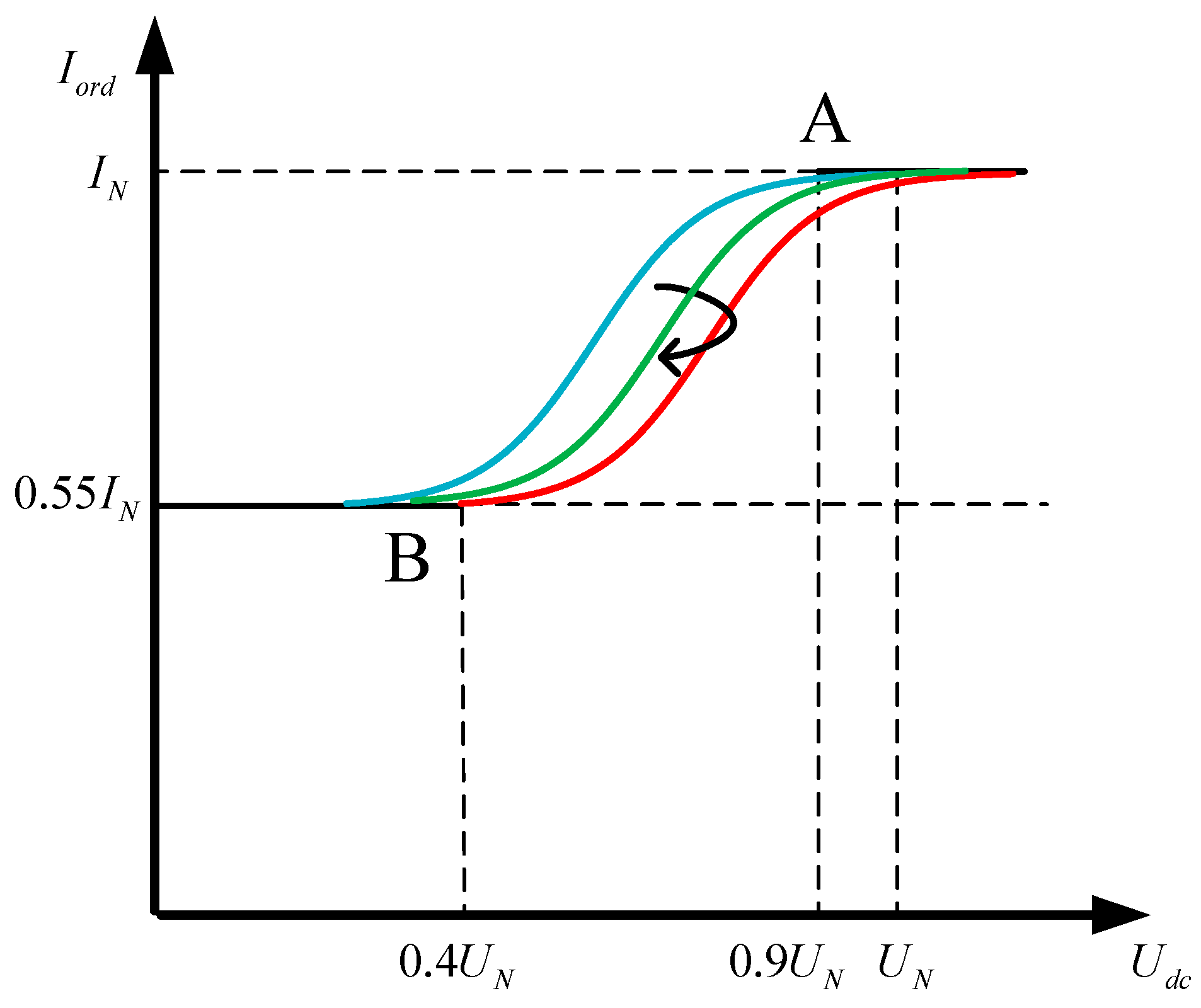
4. Nonlinear Dynamic VDCOL Control Strategy
- (1)
- At the beginning of the first phase commutation failure, the system voltage drop is serious at a low level. To avoid weakening the stability of the system voltage due to the rapid recovery of the system DC power transfer, the DC current command value of the VDCOL is designed to be small and should be relatively smooth during the gradual recovery.
- (2)
- In the middle of the first phase commutation failure, the system voltage is recovered to a higher level. The conditions for fast recovery are in place to smoothly increase the DC current and restore the system power transfer, so the current command value of the design VDCOL curve rises at a faster rate.
- (3)
- At the anaphases of the first phase commutation failure, the system voltage recovers close to the normal level. In order to achieve a smooth transition of the system from transient to steady state and to reduce the system power interaction, the DC current command of the VDCOL output is designed to have a larger value, and the recovery process is smooth.
5. Simulation Verification
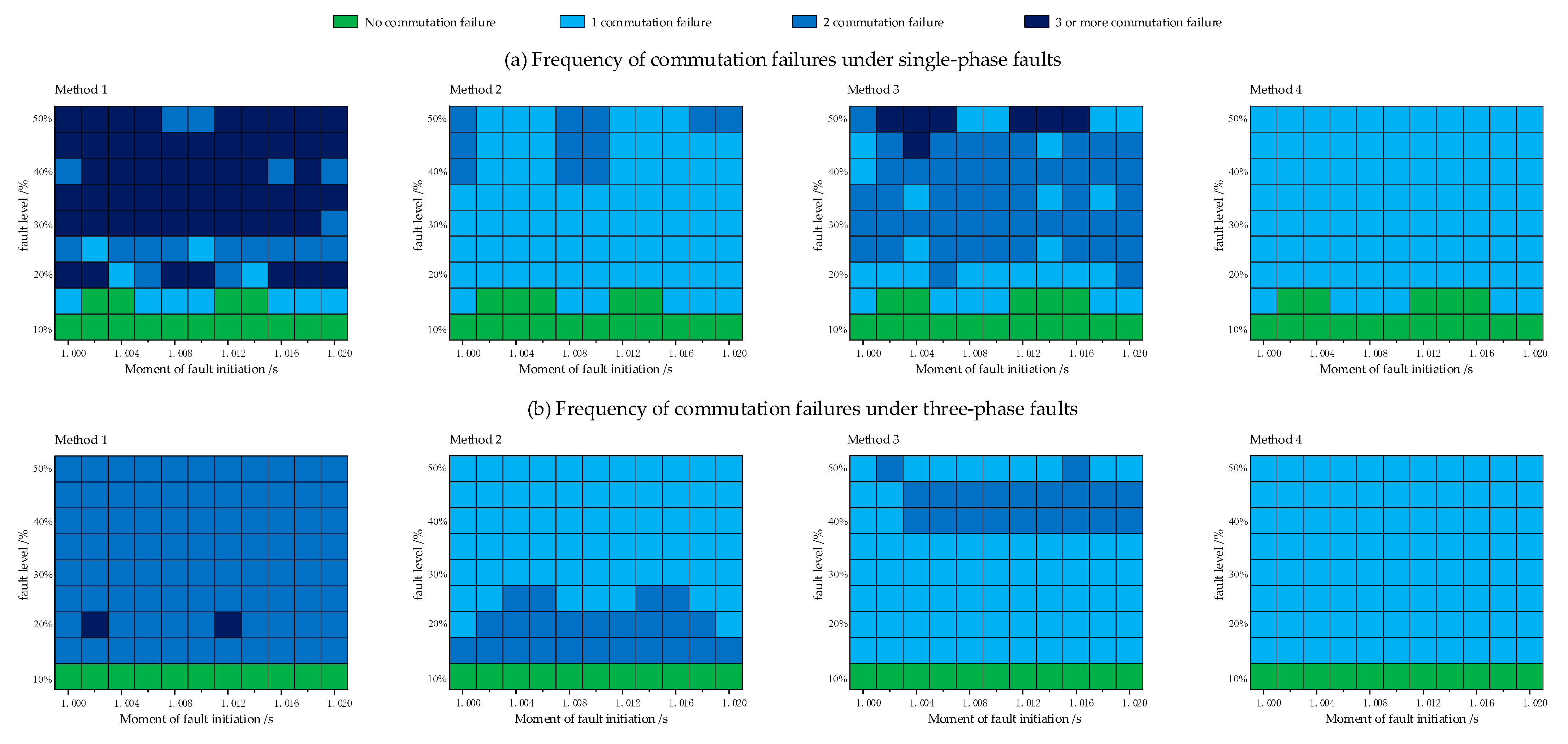
5.1. Comparison and Analysis of Methods
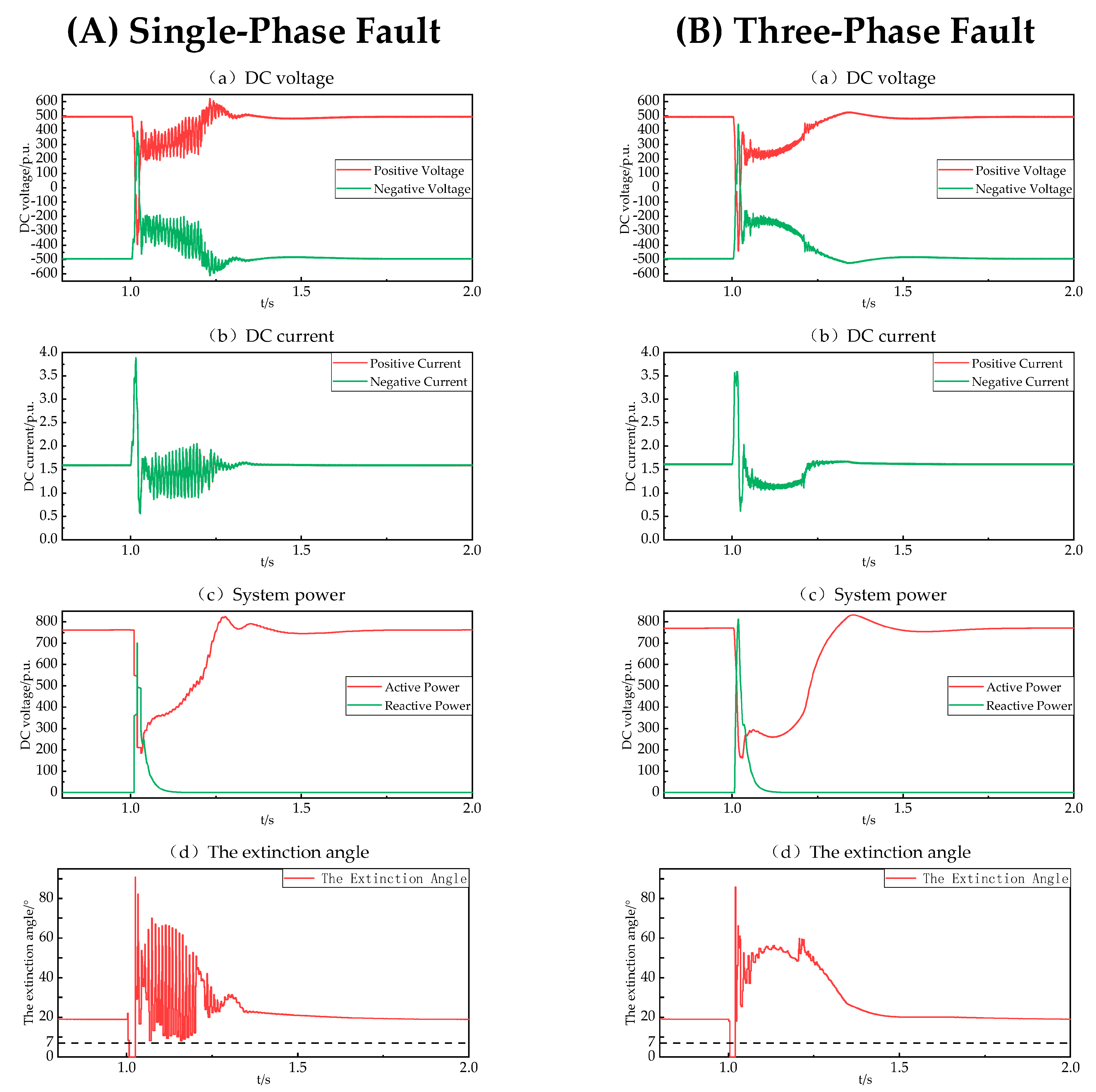
5.2. Simulation Verification Based on Actual Engineering
6. Conclusions
- (1)
- A large drop in DC voltage, which causes sharp fluctuations in the DC current command value, is a key reason for subsequent commutation failure.
- (2)
- Considering the relationship between the change of DC current and system power recovery after a fault, the Method improves the stability of the current command by optimizing the starting voltage and constructing a dynamic nonlinear VDCOL. The Method effectively suppresses the subsequent commutation failures under different fault cases of single-phase and three-phase with good results on the stabilization and recovery of the DC system.
- (3)
- The Method is realized in the DC control system without incorporating physical electrical components in the engineering practices, as the result of significant cost savings. Moreover, it is easy to achieve without the need for additional auxiliary devices of electrical devices.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| the inverter valves | |
| the inverter valve current | |
| the inverter firing angle | |
| the inverter commutation angle | |
| the inverter commutation demand area | |
| the inverter’s maximum commutation area | |
| the equivalent phase change reactance | |
| the inverter-side AC phase voltage | |
| the starting voltage | |
| the DC current command | |
| DC voltage | |
| the voltage variation | |
| the prediction parameter | |
| the correction parameter | |
| the fault dynamic offset | |
| the fault degree factor | |
| the actual RMS of phase voltage of the AC bus | |
| the rated value of phase voltage of the AC bus | |
| the fault capacity | |
| the grounding inductance | |
| the rated power of the DC transmission system. | |
| List of abbreviation | |
| VDCOL | Voltage Dependent Current Order Limiter |
| LCC | Line Commutated Converter |
| HVDC | High Voltage Direct Current |
| PLO | Phase Lock Oscillator |
| CFPREV | Commutation Failure Prevention |
| DC | Direct Current |
| AC | Alternating Current |
| MW | Mega Watt |
| kV | Kilo Volt |
| Mvar | Mega Volt Ampere Reactive |
| MVA | Mega Volt Ampere |
| CIGRE | International Council on Large Electric Systems |
| Ref | Reference |
References
- Zhao, W.J. High Voltage Direct Current Transmission Engineering Technology; China Electrical Power Press: Beijing, China, 2004. [Google Scholar]
- Thio, C.V.; Davies, J.B.; Kent, K.L. Commutation failures in HVDC transmission systems. IEEE Trans. Power Deliv. 1996, 11, 946–957. [Google Scholar] [CrossRef]
- Zhu, Y.N.; Zhang, S.Q.; Liu, D.; Zhu, L.; Zou, S.; Yu, S.Q.; Sun, Y.B. Prevention and mitigation of high-voltage direct current commutation failures: A review and future directions. IET Gener. Transm. Distrib. 2019, 13, 5449–5456. [Google Scholar] [CrossRef]
- Yuan, Y.; Wei, Z.; Lei, X.; Wang, H.; Sun, G. Survey of commutation failures in DC transmission systems. Electr. Power Autom. Equip. 2013, 33, 140–147. [Google Scholar] [CrossRef]
- Li, Y.; Liu, F.; Luo, L.F.; Rehtanz, C.; Cao, Y.J. Enhancement of Commutation Reliability of an HVDC Inverter by Means of an Inductive Filtering Method. IEEE Trans. Power Electron. 2013, 28, 4917–4929. [Google Scholar] [CrossRef]
- Guo, C.Y.; Yang, Z.Z.; Jiang, B.S.; Zhao, C.Y. An Evolved Capacitor-Commutated Converter Embedded with Antiparallel Thyristors Based Dual-Directional Full-Bridge Module. IEEE Trans. Power Deliv. 2018, 33, 928–937. [Google Scholar] [CrossRef]
- Gao, C.; He, Z.; Yang, J.; Sheng, C.; Zhang, J.; Wang, P. A Novel Controllable Line Commutated Converter Topology and Control Strategy. Proc. Chin. Soc. Electr. Eng. 2023, 43, 1940–1949. [Google Scholar] [CrossRef]
- Gao, K.; Qu, H.; Ren, M.; Liu, Y.; Zeng, X.; Cao, J.; Cui, C.; Luo, Y. Commutation Failure Suppression Technology for HVDC Transmission Based on Controlled Voltage Source. High Volt. Appar. 2023, 59, 49–57. [Google Scholar] [CrossRef]
- Rehman, A.U.; Guo, C.; Zhao, C. Coordinated Control for Operating Characteristics Improvement of UHVDC Transmission Systems under Hierarchical Connection Scheme with STATCOM. Energies 2019, 12, 945. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, J.; Gao, H. A Method for Optimizing the VDCOL Parameter to Suppress the Subsequent Commutation Failure of Multi-infeed HVDC System. Electr. Power Constr. 2021, 42, 122–129. [Google Scholar] [CrossRef]
- Zhang, L.D.; Dofnas, L. A novel method to mitigate commutation failures in HVDC systems. In Proceedings of the International Conference on Power System Technology, Kunming, China, 13–17 October 2002; pp. 51–56. [Google Scholar] [CrossRef]
- Liu, L.; Li, X.; Teng, Y.; Zhang, C.; Lin, S. An enhanced commutation failure prevention control in LCC based HVDC. Int. J. Electr. Power Energy Syst. 2023, 145, 108584. [Google Scholar] [CrossRef]
- Xiao, C.; Xiong, X.; Ouyang, J.; Ma, G.; Zheng, D.; Tang, T. A Commutation Failure Suppression Control Method Based on the Controllable Operation Region of Hybrid Dual-Infeed HVDC System. Energies 2018, 11, 574. [Google Scholar] [CrossRef]
- Zhao, J.; Li, X.; Wang, Y.; Tan, Z.; Wang, J.; Cai, Z. Continuous commutation failure suppression strategy based on firing angle deviation compensation. Electr. Power Autom. Equip. 2023, 43, 210–216. [Google Scholar] [CrossRef]
- Cong, X.; Zheng, X.; Cao, Y.; Tai, N.; Miao, Y.; Li, K. A Suppression Strategy for Subsequent Commutation Failures Considering Commutation Capability of Recovery Process. J. Shanghai Jiaotong Univ. 2022, 56, 333–341. [Google Scholar]
- Cai, H.; Li, J.; Zhou, Y.; Hu, Y. An Adaptive Phase Locked Oscillator to Improve the Performance of Fault Recovery from Commutation Failure in LCC-Based HVDC Systems. Energies 2023, 16, 5299. [Google Scholar] [CrossRef]
- Yu, Z.; Wang, J.; Fu, C.; Wu, Q.; Liu, Y.; Li, X. An Improved HVDC Synchronous Firing Control Method Based on Order Switching and Phase Compensation. IEEE Trans. Power Deliv. 2023, 38, 966–978. [Google Scholar] [CrossRef]
- Liu, X.; Cao, Z.; Gao, B.; Zhou, Z.; Wang, X.; Zhang, F. Predictive Commutation Failure Suppression Strategy for High Voltage Direct Current System Considering Harmonic Components of Commutation Voltage. Processes 2022, 10, 2073. [Google Scholar] [CrossRef]
- Ying, F.U.; Longfu, L.U.O.; Ze, T.; Yong, L.I.; Jinping, Z.; Jiazhu, X.U.; Fusheng, L.I.U. Study on Voltage Dependent Current Order Limiter of HVDC Transmission System’s Controller. High Volt. Eng. 2008, 34, 1110–1114. [Google Scholar] [CrossRef]
- Hong, L.R.; Zhou, X.P.; Liu, Y.F.; Xia, H.T.; Yin, H.H.; Chen, Y.D.; Zhou, L.M.; Xu, Q.M. Analysis and Improvement of the Multiple Controller Interaction in LCC-HVDC for Mitigating Repetitive Commutation Failure. IEEE Trans. Power Deliv. 2021, 36, 1982–1991. [Google Scholar] [CrossRef]
- Li, R.; Li, Y.; Chen, X. A Control Method for Suppressing the Continuous Commutation Failure of HVDC Transmission. Proc. Chin. Soc. Electr. Eng. 2018, 38, 5029–5042. [Google Scholar] [CrossRef]
- Cao, S.; Wei, F.; Lin, X.; Li, Z.; Jiang, Y.; Chen, C.; Ma, Y.; Li, F. A commutation failure suppression strategy based on adaptive voltage limits. Power Syst. Prot. Control 2023, 51, 165–175. [Google Scholar] [CrossRef]
- Zhang, W.; Xiong, Y.; Li, C.; Yao, W.; Wen, J.; Gao, D. Continuous commutation failure suppression and coordinated recovery of multi-infeed DC system based on improved VDCOL. Power Syst. Prot. Control 2020, 48, 63–72. [Google Scholar] [CrossRef]
- Liu, X.; Wang, Z.; Zheng, B.; Wang, T.; Qiao, X. Mechanism Analysis and Mitigation Measures for Continuous Commutation Failure During the Restoration of LCC-HVDC. Proc. Chin. Soc. Electr. Eng. 2020, 40, 3163–3171. [Google Scholar] [CrossRef]
- Cheng, F.; Yao, L.; Wang, Z.; Liu, C.; Wang, Q.; Deng, J.; Lan, T. A Commutation Failure Mitigation Strategy Based on Virtual Phase Lock Loop Voltage. Proc. Chin. Soc. Electr. Eng. 2020, 40, 2756–2765. [Google Scholar] [CrossRef]
- Guo, C.; Li, C.; Liu, Y.; Jiang, B.; Zhao, C.; Zhou, Q. A DC Current Limitation Control Method Based on Virtual-resistance to Mitigate the Continuous Commutation Failure for Conventional HVDC. Proc. Chin. Soc. Electr. Eng. 2016, 36, 4930–4937. [Google Scholar] [CrossRef]
- Lu, Y.; Tong, K.; Ning, L.; Xuan, J.; Guo, C.; Zhao, C. A Method Mitigating Continuous Commutation Failure for Double-Infeed HVDC System Based on Virtual Inductor. Power Syst. Technol. 2017, 41, 1503–1509. [Google Scholar] [CrossRef]
- Song, H.; Han, K. Research on Suppressing Continuous Commutation Failure of HVDC System Based on Virtual Capacitor. In Proceedings of the 2021 IEEE/IAS Industrial and Commercial Power System Asia (I&CPS Asia), Chengdu, China, 18–21 July 2021; p. 721. [Google Scholar] [CrossRef]
- Zhou, H.; Yao, W.; Li, C.; Wen, J. A Predictive Voltage Dependent Current Order Limiter with the Ability to Reduce the Risk of First Commutation Failure of HVDC. High Volt. Eng. 2022, 48, 3179–3189. [Google Scholar] [CrossRef]
- He, D.; Wen, J.; Geng, X.; Wang, S.; Zhang, L.; Cai, Y.; Luo, Z.; Tan, M. Study on HVDC commutation failure and voltage compensated variable slope VDCOL control. In Proceedings of the 2018 2nd IEEE Conference on Energy Internet and Energy System Integration (EI2), Beijing, China, 20–22 October 2018; p. 6. [Google Scholar] [CrossRef]
- Meng, Q.; Liu, Z.; Hong, L.; Zhou, X.; Xia, H.; Liu, Y.; Wang, X. A suppression method based on nonlinear VDCOL to mitigate the continuous commutation failure. Power Syst. Prot. Control 2019, 47, 119–127. [Google Scholar]
- Zhu, H.; Li, Y.; Zhou, Z.; Zhu, H.; Qian, W. Design of a dynamic nonlinear VDCOL controller with additional virtual capacitance. Power Syst. Prot. Control 2022, 50, 134–143. [Google Scholar] [CrossRef]
- Liu, L.; Wang, Y.; Li, X.; Zhang, B. Design of Variable Slope VDCOL Controller Based on Fuzzy Control. Power Syst. Technol. 2015, 39, 1814–1818. [Google Scholar] [CrossRef]
- Feng, M.; Li, X.; Li, N.; Wang, C.; Hong, C. Study of HVDC Piecewise Variable Rate VDCOL Based on Simplex Algorithm. J. Sichuan University. Eng. Sci. Ed. 2015, 47, 162–167. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ground Inductance/H | Recovery Time of Commutation Failure/s | ||||
|---|---|---|---|---|---|
| 0 ms | 5 ms | 10 ms | 15 ms | 20 ms | |
| 0.1 | 0.098 | 0.059 | 0.032 | 0.039 | 0.032 |
| 0.2 | 0.037 | 0.037 | 0.042 | 0.039 | 0.039 |
| 0.3 | 0.063 | 0.037 | 0.039 | 0.039 | 0.039 |
| 0.4 | 0.063 | 0.083 | 0.064 | 0.039 | 0.064 |
| 0.5 | 0.08 | 0.064 | 0.062 | 0.039 | 0.077 |
| 0.6 | 0.083 | 0.08 | 0.08 | 0.039 | 0.08 |
| 0.7 | 0.093 | 0.065 | 0.081 | 0.061 | 0.08 |
| 0.8 | 0.093 | 0.073 | 0.071 | 0.071 | 0.085 |
| 0.9 | 0.073 | 0.074 | 0.047 | 0.047 | 0.073 |
| 1.0 | 0.084 | 0.084 | 0.084 | 0.063 | 0.084 |
| Sum-up time/s | 0.767 | 0.656 | 0.602 | 0.476 | 0.653 |
| Ground Inductance/H | Recovery Time of Commutation Failure/s | ||||
|---|---|---|---|---|---|
| 1 ms | 2 ms | 3 ms | 4 ms | 5 ms | |
| 0.1 | 0.032 | 0.032 | 0.032 | 0.032 | 0.032 |
| 0.2 | 0.039 | 0.042 | 0.042 | 0.042 | 0.042 |
| 0.3 | 0.039 | 0.039 | 0.039 | 0.039 | 0.039 |
| 0.4 | 0.039 | 0.039 | 0.039 | 0.039 | 0.039 |
| 0.5 | 0.039 | 0.039 | 0.039 | 0.039 | 0.039 |
| 0.6 | 0.039 | 0.039 | 0.039 | 0.039 | 0.039 |
| 0.7 | 0.039 | 0.039 | 0.039 | 0.039 | 0.039 |
| 0.8 | 0.047 | 0.047 | 0.047 | 0.047 | 0.047 |
| 0.9 | 0.071 | 0.047 | 0.047 | 0.047 | 0.071 |
| 1.0 | 0.062 | 0.063 | 0.067 | 0.079 | 0.079 |
| Sum-up time/s | 0.446 | 0.426 | 0.43 | 0.442 | 0.466 |
| Parameters | Rectifier Side | Inverter Side |
|---|---|---|
| Reactive Power Compensation Capacity | 626 Mvar | 626 Mvar |
| AC System Parameters | 382.87 kV, | 215.05 kV, |
| 47.6 ∠ 84°Ω, | 21.2 ∠ 75°Ω, | |
| SCR = 2.5 | SCR = 2.5 | |
| Transformer Converter | 603.87 MVA, | 591.79 MVA, |
| = 0.18 p.u., | = 0.18 p.u., | |
| 345/213.5 kV | 230/209.2 kV |
| Parameters | Tianshengqiao Converter Station | Guangzhou Converter Station |
| rated voltage/kV | 230 | 230 |
| Short circuit capacity/GVA | 50 | 50 |
| Equivalent Impedance/Ω | 12.1 | 8.3 |
| Equivalent Impedance Angle/° | 4.372 | 6.370 |
| Converter transformer capacity/MVA | 84 | 84 |
| Rated voltage of the converter transformer/kV | 354/177/177 | 377/168.5/168.5 |
| leakage resistance/% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Han, K.; Liu, S.; Chen, H.; Zhang, X.; Zou, K. A Dynamic Nonlinear VDCOL Control Strategy Based on the Taylor Expansion of DC Voltages for Suppressing the Subsequent Commutation Failure in HVDC Transmission. Energies 2023, 16, 7342. https://doi.org/10.3390/en16217342
Li H, Han K, Liu S, Chen H, Zhang X, Zou K. A Dynamic Nonlinear VDCOL Control Strategy Based on the Taylor Expansion of DC Voltages for Suppressing the Subsequent Commutation Failure in HVDC Transmission. Energies. 2023; 16(21):7342. https://doi.org/10.3390/en16217342
Chicago/Turabian StyleLi, Hongzheng, Kunlun Han, Shuhao Liu, Hailin Chen, Xiongfeng Zhang, and Kangtai Zou. 2023. "A Dynamic Nonlinear VDCOL Control Strategy Based on the Taylor Expansion of DC Voltages for Suppressing the Subsequent Commutation Failure in HVDC Transmission" Energies 16, no. 21: 7342. https://doi.org/10.3390/en16217342
APA StyleLi, H., Han, K., Liu, S., Chen, H., Zhang, X., & Zou, K. (2023). A Dynamic Nonlinear VDCOL Control Strategy Based on the Taylor Expansion of DC Voltages for Suppressing the Subsequent Commutation Failure in HVDC Transmission. Energies, 16(21), 7342. https://doi.org/10.3390/en16217342