1. Introduction
In recent years, industrial robots have been increasingly introduced for small, low-volume production of multi-items. With a shortage of human resources, there is a need to automate complex transportation and production activities, such as pick-and-place operations in assembly and inspections using robotic systems to reduce manual labor. Various efforts have been made to transfer these tasks to industrial robots. However, the energy consumption in those robotic applications is growing rapidly. Operating industrial robots efficiently within limited space requires energy-efficient and conflict-free motion and trajectory planning, which is a critical concern. In the field of automation, particularly in robotic applications, precise motion planning and trajectory computation are of paramount importance.
Robots and automated devices operate at certain speeds to achieve shorter manufacturing periods. However, these operating speeds can impact the precision and repeatability of the motion trajectory, as they require intense actions from the robot’s joint actuators and the robot controller [
1]. Researchers have focused on developing robot motion planning and trajectory generation algorithms that can be implemented at designated speeds while ensuring the safety of the robot [
2,
3]. Motion planning methods enable the robot to navigate along a geometric path, starting from an initial start position and reaching a final goal position while passing through predefined positions in either the robot’s configuration space (C-space) or operating space. On the other hand, trajectory planning algorithms follow a given geometric path and provide time information. Trajectory planning algorithms play a vital role in robotics as they influence not only the kinematic properties of the motion but also dynamic factors such as torque, gravity effects, friction, and so on [
1,
4].
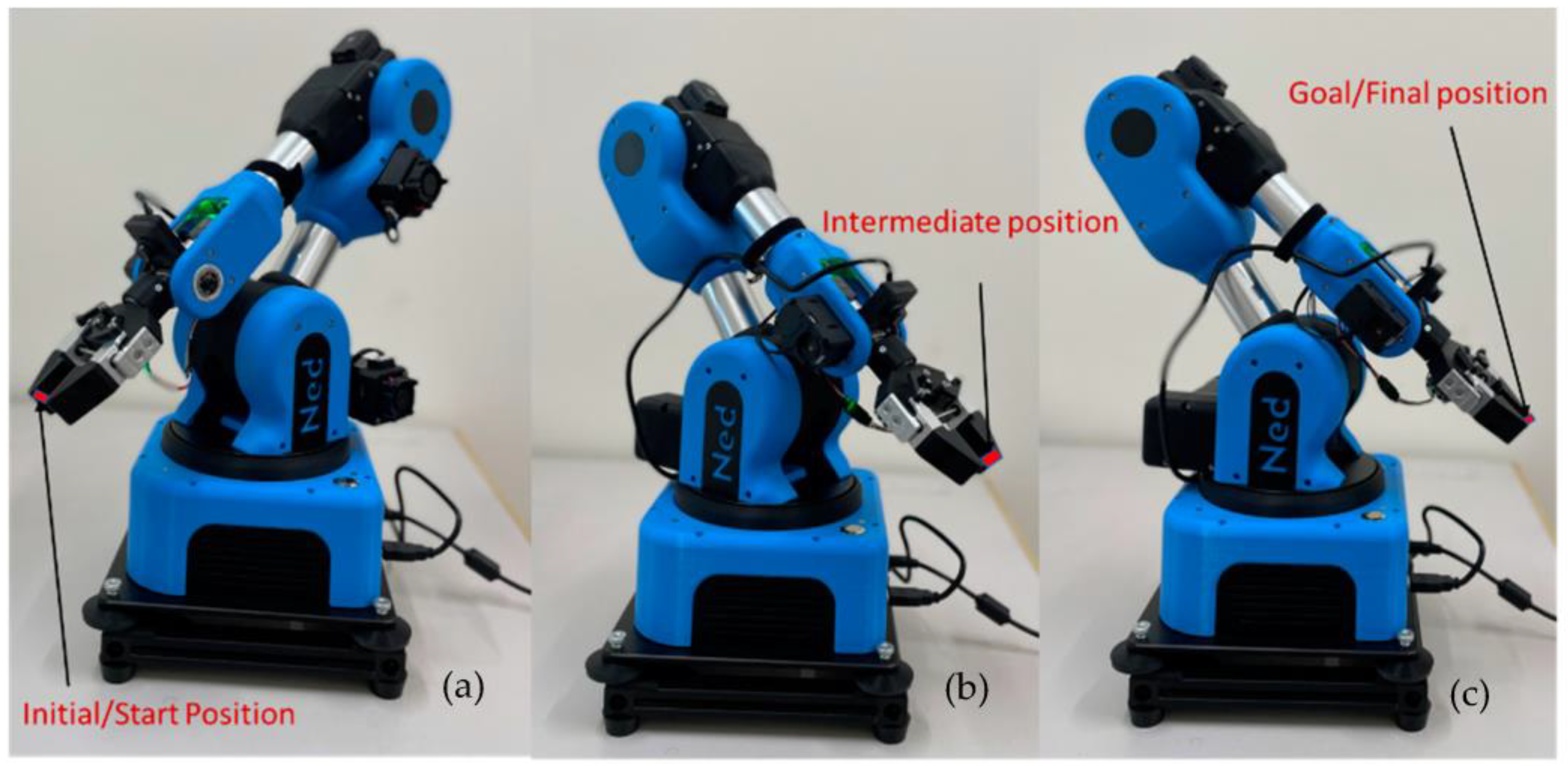
Furthermore, the growing demand for flexible robotic applications in dynamic manufacturing environments requires a growing number of manufacturing assembly resources. However, automated assembly systems like robotic manufacturing systems usually have limited flexibility due to the significant programming effort required to define robot trajectories from a start position to an end position, passing through intermediate positions as illustrated in
Figure 1 for a 6DOF serial robot. Traditionally, skilled robot operators spend considerable time optimizing robotic operation paths for each specific application using conventional programming methods, typically referred to as robot teaching [
5]. In robot teaching, intermediate positions between the start and goal positions are manually recorded by sequentially moving the robot to each position using the teach pendant, which is a time-consuming process. The robot’s final path is then generated by connecting the recorded positions using a robot controller, which moves across all the positions while considering the robot’s joint dynamics. The quality of the final trajectory heavily relies on the recorded positions and the experience of the robot operator.
Automatic path planning in robotics aims to determine how a robot can move from its initial to its final position, with a primary focus on collision avoidance. Over the past two decades, researchers have devoted significant efforts to achieving optimal motion trajectories through various approaches, aiming to minimize the cost or the time required to execute the robotic operation. For example, Chettibi et al. [
6] created an electromechanical model of a series manipulator to find the optimal trajectory from the initial to the final position that satisfies the electromechanical constraints. Even in simple cases, computing optimal motion plans is challenging due to obstacles in the robot’s C-space [
1,
2,
3,
7].
Therefore, to achieve offline robot programming and address computational challenges, it is necessary to optimize the motion planning trajectory by applying effective algorithms to the robot while in operation. In this research, we apply a novel motion planning algorithm (FC-RRT*) for an industrial robot (as shown in
Figure 1) using the circle point method, which considers energy consumption during object picking and placing. We compare this novel motion planning algorithm to traditional algorithms and robot kinematics solutions. Furthermore, to the best of the authors’ knowledge, this circle point method has not been used to optimize energy consumption during motion planning in prior studies.
Conventional motion and path planning methods neglect the reduction of energy consumption for the rotary axes of a 6DOF serial manipulator. Therefore, it has been difficult for decision-makers to find a motion and conflict-free motion and trajectory planning for pick and place. By utilizing our proposed method, pick-and-place operations that consume less energy for the robot joints can be easily obtained. This is the motivation to introduce our energy-efficient motion planning in pick-and-place operations for 6DOF manipulators.
Our objective in this study is to optimize the overall path that includes circular motions to help minimize energy consumption. This involves considering the entire trajectory and finding the most efficient combination of straight lines and circular arcs to reach the desired destination. An indexing test is used to identify the energy consumption for each rotary axis using different motion planning algorithms rather than not finding the optimal movement. Ibaraki et al. [
8] and Alam et al. [
9] demonstrated that axis indexing tests ensure that the robot can accurately reach and maintain positions, improving the precision of its operations as well as the robot’s ability to consistently return to the same position when commanded, which is critical for tasks requiring repeatability. By performing an axis indexing test, it can identify and quantify any systematic errors or misalignments in the robot’s rotary axes, allowing for corrective actions so that robots can operate more efficiently, reducing cycle times and improving productivity. In this study, we compare the energy consumption of different motion planning algorithms for paths with the same length and orientation for robotic pick-and-place operation. The application of robotic pick and place is of paramount importance as it can provide solutions to optimize labor utilization by automating repetitive and physically demanding tasks with extreme precision, contributing to the production of high-quality goods and minimizing defects. The experimental results of axis indexing tests indicate that our proposed method consumes less energy (1.6% to 16.5% less) compared to both the kinematic solution and the conventional RRT* algorithm. The main contribution of the paper is as summarized follows.
We propose an energy-efficient motion planning algorithm based on a flight cost-based RRT* algorithm for the pick-and-place operation of a robot arm.
Our proposed method can optimize circular motions that can reduce energy consumption. Energy consumption is evaluated by using our developed energy consumption formulation based on the circular motion. This is the first work that has not been reported in conventional studies. This novel method can incorporate energy consumption as an objective or constraint. These algorithms should be capable of finding motion and trajectory plans that minimize energy usage while satisfying other relevant constraints, such as collision avoidance.
The experiment results of the axis indexing tests indicate that by employing the sampling-based FC-RRT* algorithm, the robot joints consume less energy (1.6% to 16.5% less) compared to both the kinematic solution and the conventional RRT* algorithm.
Our proposed method can be utilized as a general motion planning algorithm for energy-efficient pick-and-place operations. Moreover, this energy-efficient planning can lead to reduced operational costs, as it minimizes the power consumption of the robot. This is especially important for industries where energy costs are a significant factor.
The remainder of this article is structured as follows:
Section 2 highlights the related research on motion planning optimization and outlines our approach to motion planning optimization and energy consumption optimization.
Section 3 explains the sampling-based motion planning algorithms and 3D kinematic solutions for a 6DOF serial type of industrial robot.
Section 4 describes the experimental setup and data acquisition, while
Section 5 provides the experimental results and their summary.
Section 6 discusses the findings of energy consumption in the experiments.
Section 7 finally provides the conclusions and outlines future research directions.
2. Related Works and Our Approach to Robot Motion Planning
To overcome the difficulties of teaching robots and the computational complexity of robot motion planning, researchers have developed various sampling-based algorithms that focus on the concept and/or conversion of samples within the C-space in an iterative manner [
4,
7,
10]. These planners aim to define sampling-based motion in high-dimensional C-spaces using two main approaches: (1) based on a roadmap [
11,
12,
13,
14] and (2) based on random trees [
15,
16,
17,
18]. Kavraki et al. [
11] introduced the probabilistic roadmap (PRM) approach for motion planning in collision-free paths. The PRM method consists of two phases: learning and querying. During the learning phase, a probabilistic roadmap is constructed by generating random free configurations (e.g., through Monte Carlo sampling) in the robot C-space and connecting them with a simple motion planner, often called a local planner. Several PRM approaches have been developed to address various issues [
15]. For example, Chen et al. [
19] proposed P-PRM, a potential field-based PRM in C-space specially designed for 2D quadrotor unmanned vehicles. It uses a sampled potential field to select useful nodes for collision avoidance in the sampling positions, and the cost function is employed to prevent the algorithm from getting trapped in the local optimum at goal positions. Sun and Gao [
13] implemented a probabilistic roadmap planner strategy for mobile robots by improving uniformity in node allocation in the algorithm and increasing the success rate of nodes. They also enhanced the computation time, path span, and control efficiency of the PPM algorithm for improved motion planning performance. Wang and Tian [
20] proposed a hybrid offline–online motion planning strategy for service robots, combining an object-level semantic map with the PRM method. While PRM is widely used in robot motion planning, it does not always provide the optimal solution. In C-space with closely located obstacles and narrow paths between the obstacles, the likelihood of generating nodes between the narrow paths is extremely low. If the number of iterations is increased, the system may generate nodes in that narrow region. When the system fails to generate a path in the narrow paths of the C-space, it fails to provide the optimal path [
4].
Lavalle and Kuffner [
18] introduced a rapidly exploring-based random tree (RRT) approach to overcome the limitations of the PRM in various motion planning configurations, including structures with up to twelve degrees of freedom. The fundamental principle of RRT is that the root of the tree represents an initial position, and newly generated positions are connected to neighboring positions within the random tree. However, RRT does not always guarantee an optimal solution for the robot’s trajectory [
21]. To address the optimality issue in motion planning, researchers proposed RRT-star (RRT*), an improved variant of RRT that is asymptotically optimal [
16]. By incorporating features such as tree rewiring and searching for the best neighboring node, RRT* enhances the quality of the resulting path. However, achieving asymptotic optimality with RRT* requires a longer implementation time and a slower convergence rate for the path. Furthermore, Qi and his research group introduced a multi-objective dynamic RRT* (MOD-RRT*) algorithm, which is suitable for robot navigation in unknown dynamic environments. MOD-RRT* aims to find the optimal node among multiple candidates within a short period by employing path initiation and path replanning techniques [
22]. Kwon et al. [
23] proposed the dual-tree RRT* to generate rapidly growing trajectories while considering the kinodynamic limitation of robots in constrained and cluttered environments. This approach employs two tree topologies with minimal computational cost. Fang and Ding [
24] proposed a comprehensive framework for active visual measurement using an industrial robot based on a high-productivity and high-performing sampling-based motion planning approach. The proposed route planner utilizes the RRT-based planning approach to generate a point-to-point path in the joint space that satisfies the camera’s field of vision requirements while ensuring obstruction-free and conflict-free constraints. Recently, Zhang et al. [
25] proposed a multi-objective optimization approach using deep reinforcement learning for the trajectory-planning problem of a six-axis robotic arm, aiming to minimize factors such as accuracy, energy consumption, and smoothness, and demonstrates its effectiveness compared to the RRT algorithm through simulations and physical experiments.
The sampling-based approaches discussed earlier primarily focus on motion planning optimization in terms of time and/or cost, without explicitly considering energy optimization. In this paper, the optimization of the robot motion planning considers a 6DOF robot with a specific emphasis on reducing energy consumption across all six joints during the pick-and-place task. Many researchers focused on reducing energy consumption in the optimization of motion planning for mobile types of robots such as unmanned aerial vehicles (UAV) [
26,
27,
28]. There have been relatively few studies investigating energy consumption reduction in industrial robots while considering motion planning optimization [
29,
30]. Nonoyama et al. [
31] explored energy-efficient robot configurations in optimal motion planning using heuristic-based approaches for a dual-arm SCARA robot. Hovgard et al. [
32] conducted energy optimization of multi-robot systems by adjusting motion parameters. Pellegrinelli and his research group utilized the PRM approach to analyze and optimize the energy usage of robotic production processes, resulting in the identification of feasible and stable pick-and-place robotic manufacturing solutions [
33]. Carabin and Scalera [
34] presented an approach for minimum-energy trajectory planning in industrial robotic systems using dynamic and electro-mechanical modeling of one-degree-of-freedom systems, experimentally validated on two robotic systems, showing potential for enhancing energy consumption performance in point-to-point motions.
Pellicciari et al. [
35] proposed electromechanical models for both serial and parallel manipulator types to achieve energy-optimal trajectories. In the literature, energy consumption characteristics for industrial robots are described based on inertial and friction parameters, which form the basis of energy consumption analysis. Researchers have suggested an identification approach that utilizes software-simulated power data to estimate the energy consumption of robots [
30]. Pastras and his team conducted a theoretical study to explore possible energy savings through the optimization of robot motion acceleration characteristics. The analysis focuses on motion profiles that do not change with time, requiring no new equipment or altering production cycle times [
36]. Feng et al. [
37] investigated standard robot joint configurations for cyclic pick-and-place tasks in manufacturing to reduce energy consumption. Researchers presented intelligent programming approaches for robot trajectories, considering joint dynamic parameters to construct energy- and time-optimal paths [
3,
34,
38]. However, the motion planning methods above have certain limitations, including the possibility of getting trapped into a local minima and a slow convergence rate [
28].
To tackle the challenges of industrial robot motion planning, this study utilizes a unique flight cost-based rapidly exploring random tree star (FC-RRT*) algorithm for each rotating axis of a 6-DOF serial type of industrial robot. Guo et al. [
39] introduced the FC-RRT* algorithm for mobile robots to deal with safety regulations and flight constraints in complex 3D environments, without considering energy consumption. In the FC-RRT* algorithm employed in this study, the flight cost function and flight limitations are fully incorporated during the node extension and utilized as heuristic information to guide the expansion of tree nodes. This motion planning technique promotes node creation in a defined direction rather than a random approach based on a heuristic algorithm as a function of cost and time. Furthermore, the flight cost function and flight constraints are also utilized to influence the update of parent nodes. Thus, a method is devised that combines the guidance of the flight cost function and flight constraints to discover an optimal path with the shortest length that satisfies both optimality and requirements. In the experiment, the power consumption for the rotary axis is examined by conducting the axis indexing test, as defined in the literature [
9,
40]. As demonstrated by the researchers, the axis indexing test, based on the “circle point method” has inherent effects on the end effector positions of the robot due to changes in joint axis angles [
8].
In this research, the energy consumption for each rotary joint is determined separately by employing the “circle point method”. This method offers deeper insights into both motion planning and optimization of energy efficiency, which adds another level of novelty to this work. Additionally, the axis indexing test utilizes the best-fit plane and best-fit circle for numerical optimization to generate optimal positions in the robot trajectory as described in [
5,
40]. As the circle point approach is used in this experiment, the energy consumption for each rotating robot axis can only be obtained through the axis indexing test. Therefore, the specific novelty of this paper can be summarized as follows:
- (1)
The application of the FC-RRT* algorithm to 6DOF serial manipulators for pick-and-place operations is a novel adaptation. Typically, this algorithm has been used in the context of mobile robots for tasks like navigation and localization. Adapting it for industrial robots expands its utility and demonstrates its versatility.
- (2)
Industrial robots, especially those with 6DOF, have complex kinematics and pose unique challenges in motion planning. This adaptation addresses the complexities of manipulating objects with multiple degrees of freedom, which is distinct from mobile robot navigation.
- (3)
The incorporation of the heuristic flight cost function in the algorithm highlights a focus on energy optimization, which is a critical consideration in industrial applications. The adapted algorithm can be fine-tuned to achieve precise control over manipulator movements, ensuring that pick-and-place operations are performed with high accuracy and repeatability.
4. Methodology of the Experiments
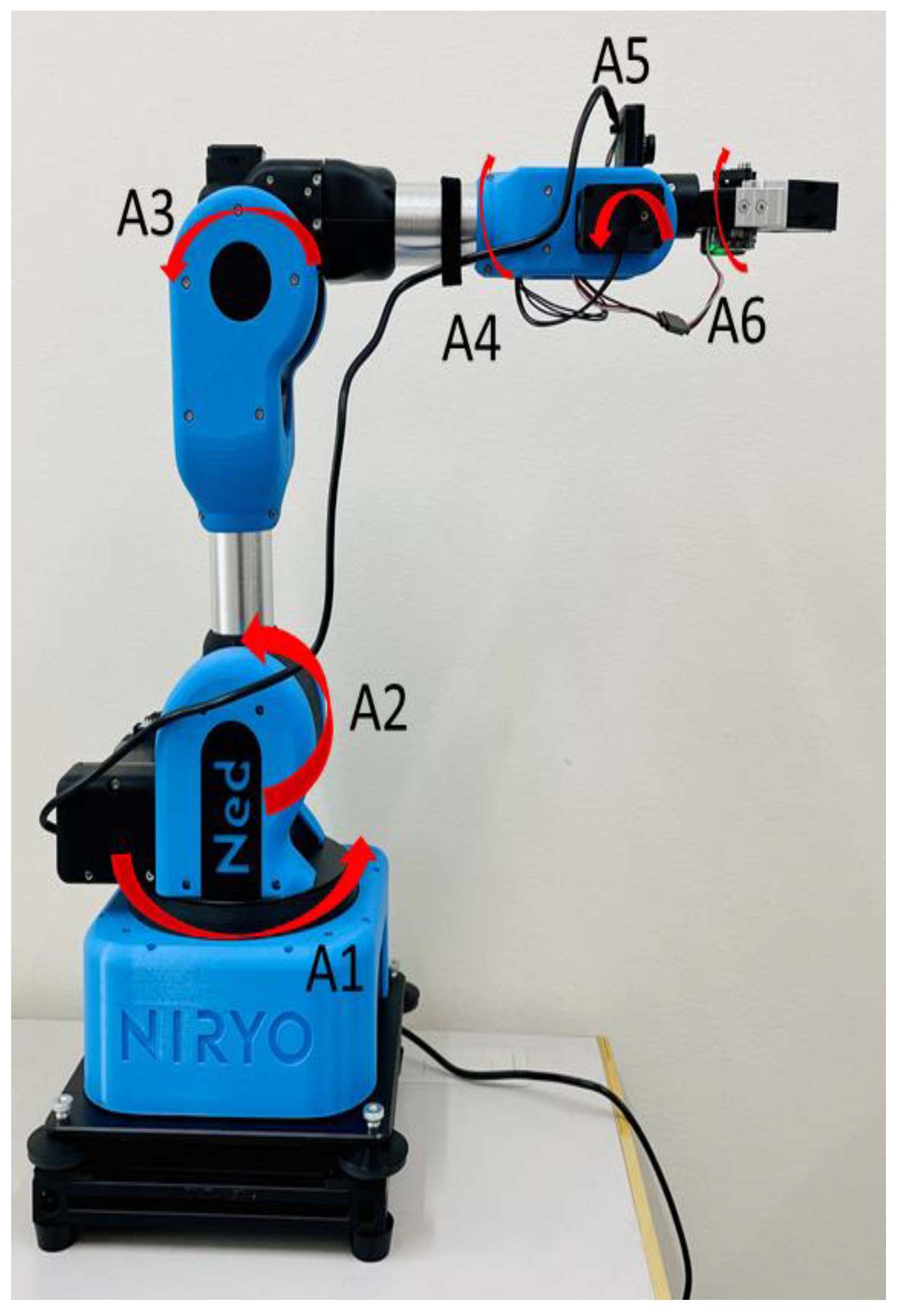
The experiment is set up so that one axis rotates in the robot’s C-space while the other rotating axes remain fixed or at the zero angular position. In the literature, this type of experiment is referred to as the axis indexing test [
9]. For example, when the A1 axis of the robot in
Figure 1 rotates from t0 radians (rad) to 1 rad with an interval of supposing 0.1 rad while the A2-axis to A6-axis is kept at constant (0 rad), the experiment is defined as A1 axis indexing test.
Table 1 shows the essential features of the robot in
Figure 4.
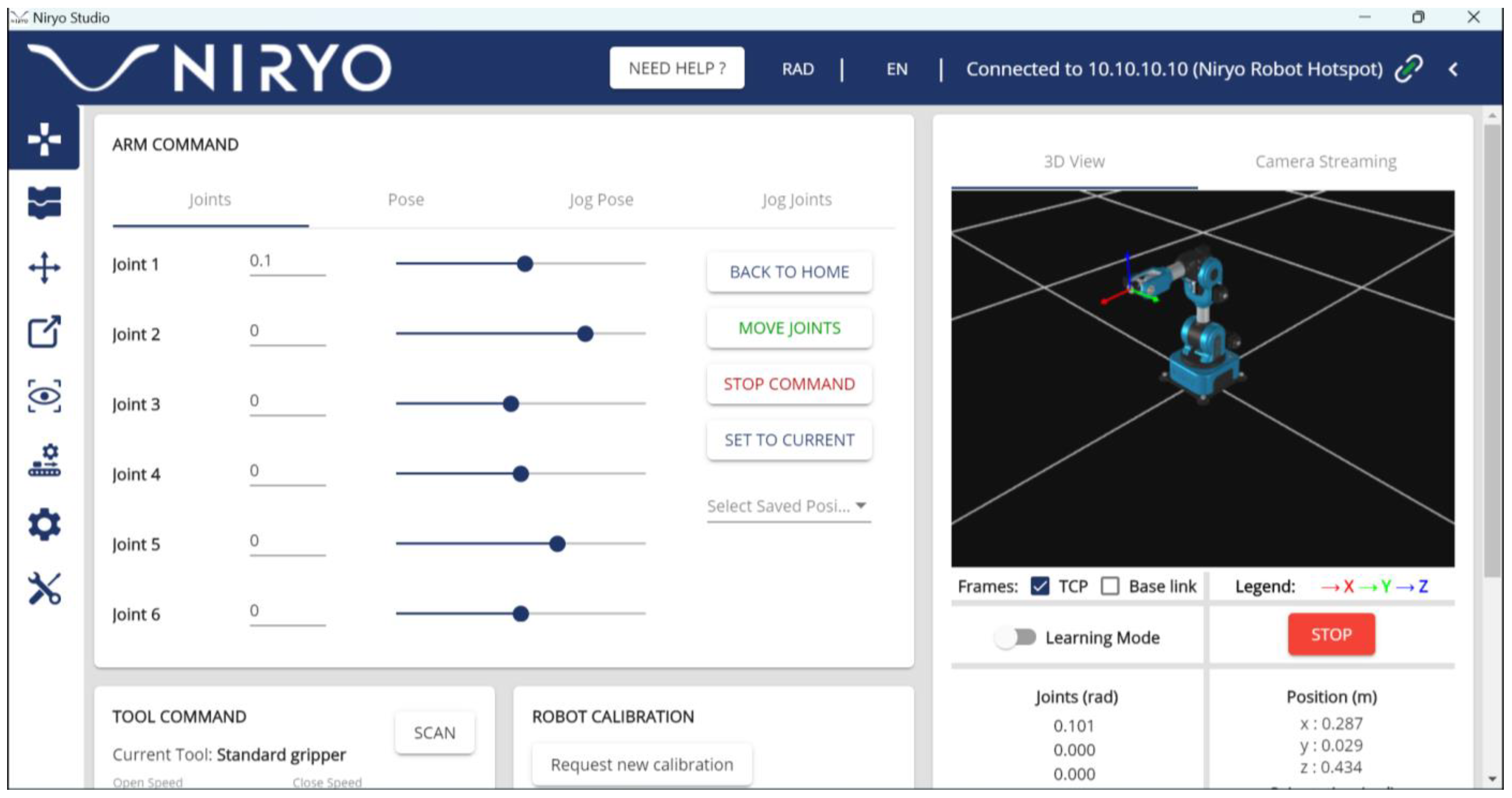
Figure 5 shows the example of the A1 axis indexing test in the Niryo Studio 1.8.8, which is a graphical human machine interface (HMI) and permits rapid and explicit control of Ned with an external workstation. In this situation, the A1 axis (joint 1 in Niryo studio) is rotated from 0 rad to 0.10 rad, while Joint 2 to Joint 6 are at the constant angular position at 0 rad.
Table 2 shows the data for the A1 axis indexing test for the condition:
θ1 = [0:0.1:1.5] rad,
θ2 =
θ3 = θ4=
θ5 =
θ6 = 0 rad, where
θj is the angular position of the
j axis.
Similarly, for the other axes (A2 to A6), indexing tests are performed where the axis under experiment is rotated with the angular position, as shown in
Table 3, while the other axes are kept constant at 0 rad.
6. Discussion on Energy Consumption
The energy consumption of an industrial robot with a 6DOF configuration in robotic pick-and-place operation is investigated in this study.
Figure 10 represents the power consumption of the robot for the A1 to A6 axis indexing test using the work–energy hypothesis for circular path trajectory. The bar graphs show the calculated energy consumption or variation in the corresponding energy consumption for all the measurement points, using kinematic solutions as well as applying conventional RRT* and the novel FC-RRT* algorithm.
Table 5 displays the average power consumption results as well as the changes in efficiency for all axes. The torque curves are not represented because the torque curve is the motor’s torque output at different speeds or operating points. In our experiment, the rotational speed is fixed and controlled by the robot controller. Moreover, the torque is determined as a function of the displacement of rotary joint angles and the rotational distance, applying the work–energy theorem as detailed in
Section 5.2. The results in
Table 5 show a significant improvement (more than 10%) in power consumption for the A1 to A3 axis by applying the FC-RRT* algorithm to the kinematic solution. However, the power consumption for the A4 to A6 axes is less than 5%. The convergence rate of FC-RRT* is faster than that of the kinematic solution because the heuristic cost function is defined as a function of the minimal distance (as in Equation (4)) in the robot C-space, providing an energy-efficient solution for the 6DOF serial robot.
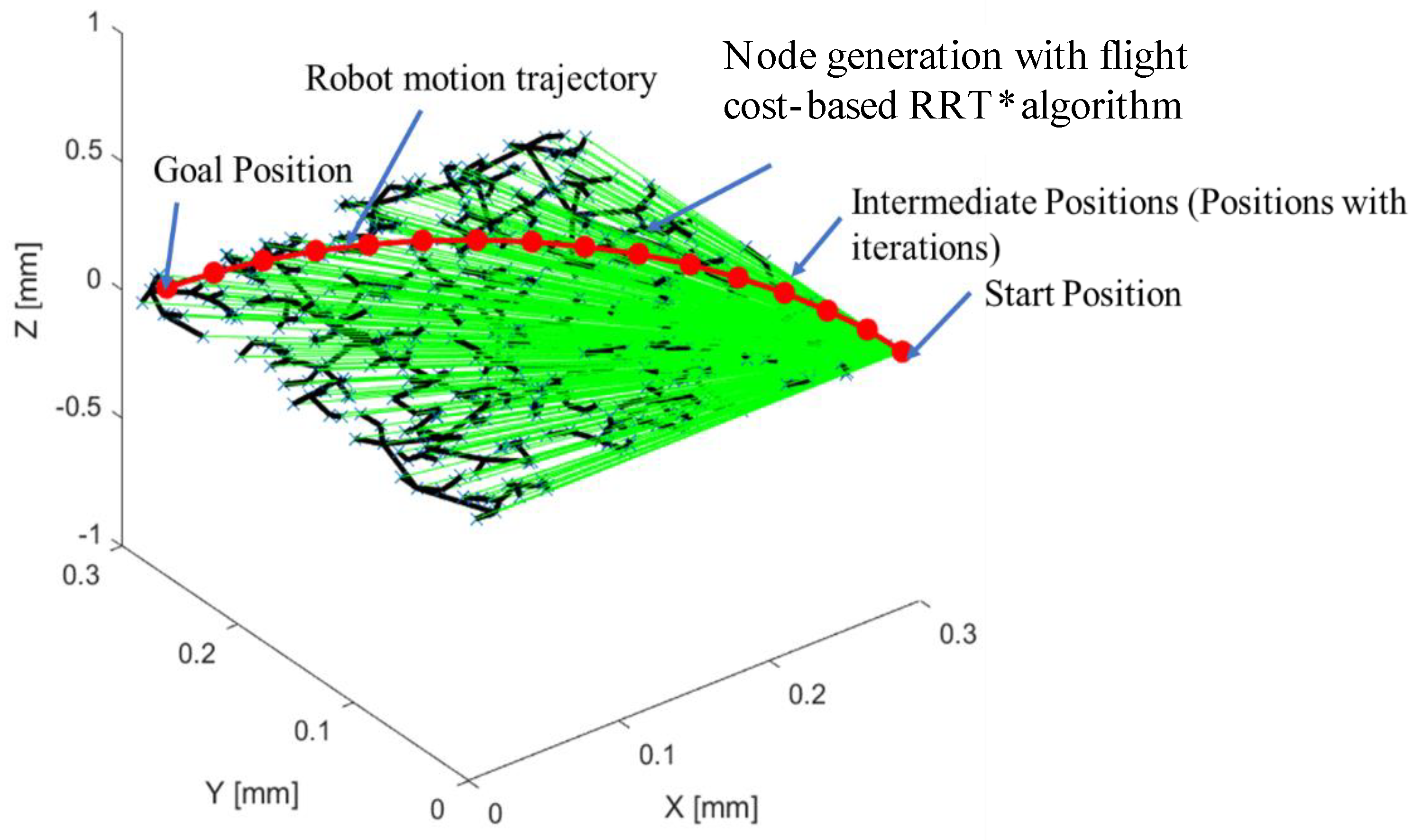
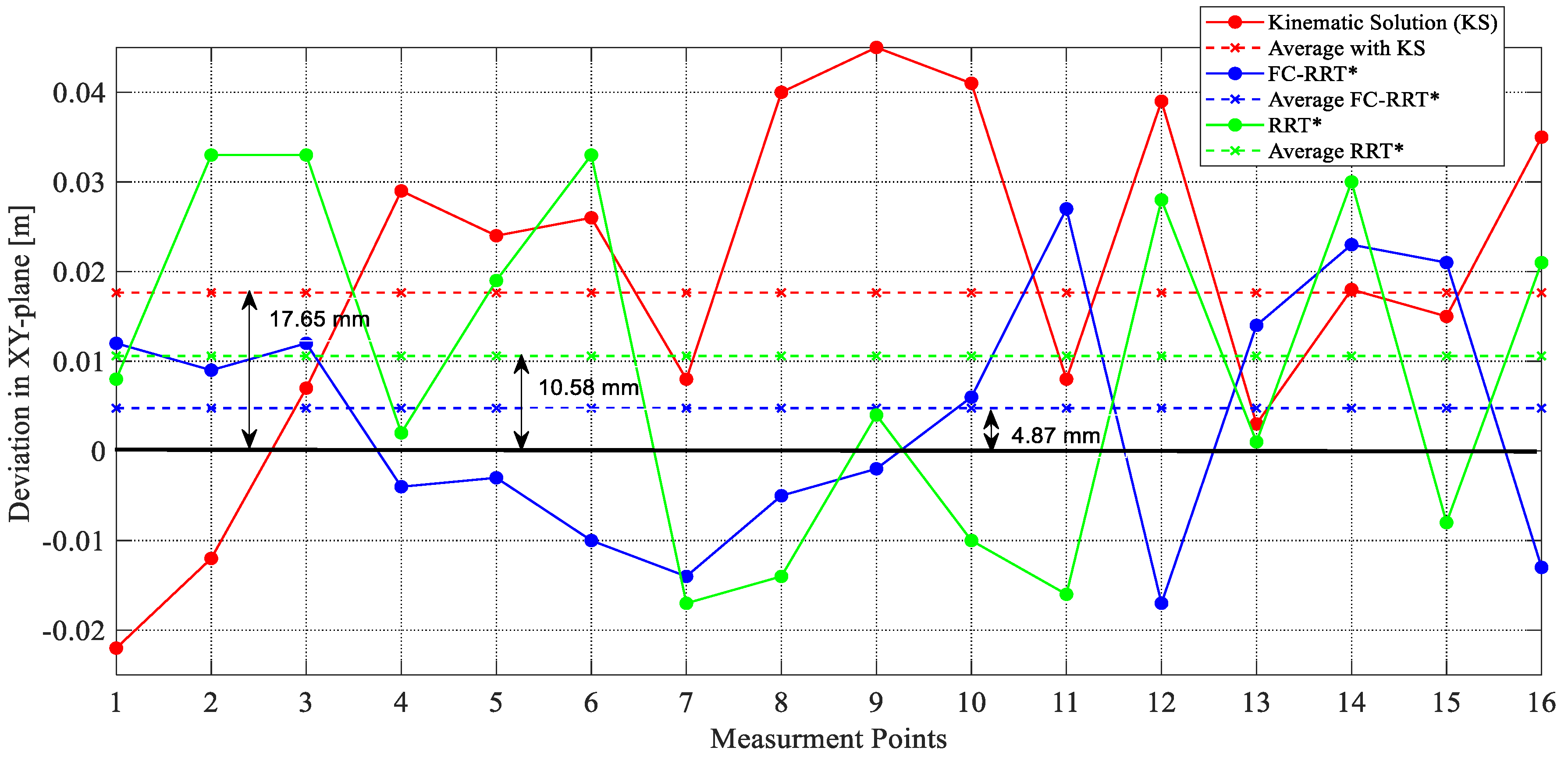
While addressing energy consumption, the study also focuses on robot motion planning optimization using graph search-based motion planning algorithms. To optimize the motion trajectory, this study employs a novel sampling-based method known as the flight cost-based RRT* (FC-RRT*). The variance in position with the FC-RRT* method is much better than the kinematic solution and the RRT* algorithm, as shown in
Figure 11. However, in some circumstances, the divergence using the conventional RRT* approach is poorer (A2 and A5 axis) than the kinematic solution. Conventional RRT* generates new nodes in the C-space in random order, whereas FC-RRT* generates new nodes in a specified direction (shown in Algorithm 5—steps 9 and 11) with the minimal heuristic cost function, which improves the positioning deviation solutions for FC-RRT*. On the other hand, for a 6DOF serial robot, the A1 to A3 axes have the highest influence on the robot’s pose since they span most of the workspace. Therefore, the positioning deviation improvements by using FC-RRT* for the A1 to A3 axes are greater than for the other axes, which is also probably attributable to higher energy consumption for the A1 to A3 axes (shown in
Table 5). A balance of energy consumption and total motion time should be considered when applying the FC-RRT* method. Setting an appropriate weighting factor for the flight cost
and the parameter of
should be carefully considered.
There are several case studies that can be applied to the proposed approach to complex pick-and-place environments where efficiently avoiding collisions while optimizing for energy efficiency is important. The proposed algorithm can find collision avoidance motion and trajectory planning efficiently while reducing energy consumption. These case studies will be conducted in our future study.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}