1. Introduction
The consensus among most nations is that reducing greenhouse gas emissions is imperative to mitigate the influence of climate change. In pursuit of this objective and to meet the growing electricity demand, South Africa is actively strategizing a shift towards an electricity generation system more reliant on renewable energy sources (RESs) [
1]. Since 2011, South Africa has undertaken an initiative to promote independent power generation using RESs through a competitive bidding approach. In its latest energy plan, the country aims for RESs to account for over 25% of its total energy generation by 2030 [
2]. The integration of these renewable energy sources into the present power grid poses intricate issues, such as capacity issues and losses incurred during unfavorable power conversion processes. Consequently, the imperative arises to develop small-scale grids, known as microgrids (MGs), equipped with their control structure, loads, energy storage technologies, and generating sources, particularly for remote areas [
3]. The use of microgrids alleviates capacity issues as the power is generated and used locally instead of through the power system. Microgrids enable cost-effective utilization of locally available renewable energy sources and facilitate their distribution to nearby loads, ensuring energy independence with economic viability. Based on their coupling bus, MGs can be categorized into hybrid AC-DC, DC, and AC configurations [
4]. Microgrids can operate either as stand-alone systems or be connected to the main power grid. Significant progress has been made in recent years to enhance the operations of the AC microgrid. In recent times, DC microgrids have gained considerable attention due to their compatibility (DC interface) with most renewable distributed energy resources (DERs). Additionally, they offer advantages such as increased stability, enhanced efficiency, improved power quality, and reduced control complexity (eliminating the need for reactive power and frequency controls) [
5,
6]. Research carried out by [
7] revealed that DC networks exhibit a 15% enhancement in voltage stability when juxtaposed with AC networks.
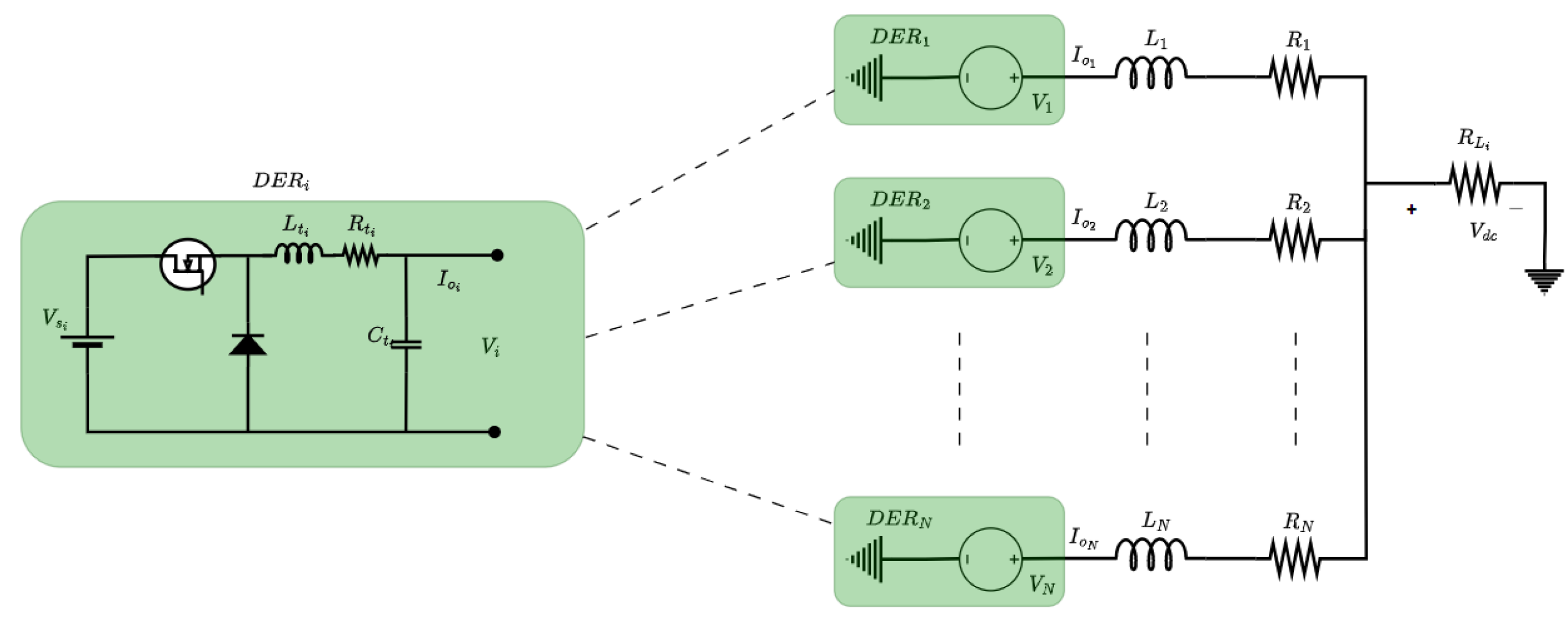
The DERs are interconnected in parallel to a shared bus within a DC microgrid configuration. Therefore, ensuring stable operation of the MG relies on effectively controlling the power electronics converter that interfaces with an individual DER. The control functions within a DC microgrid encompass various tasks, such as cost optimization, management of energy storage systems, power balancing, voltage restoration, and load distribution [
8,
9]. The control structure can be classified hierarchically into three tiers: tertiary, secondary, and primary control [
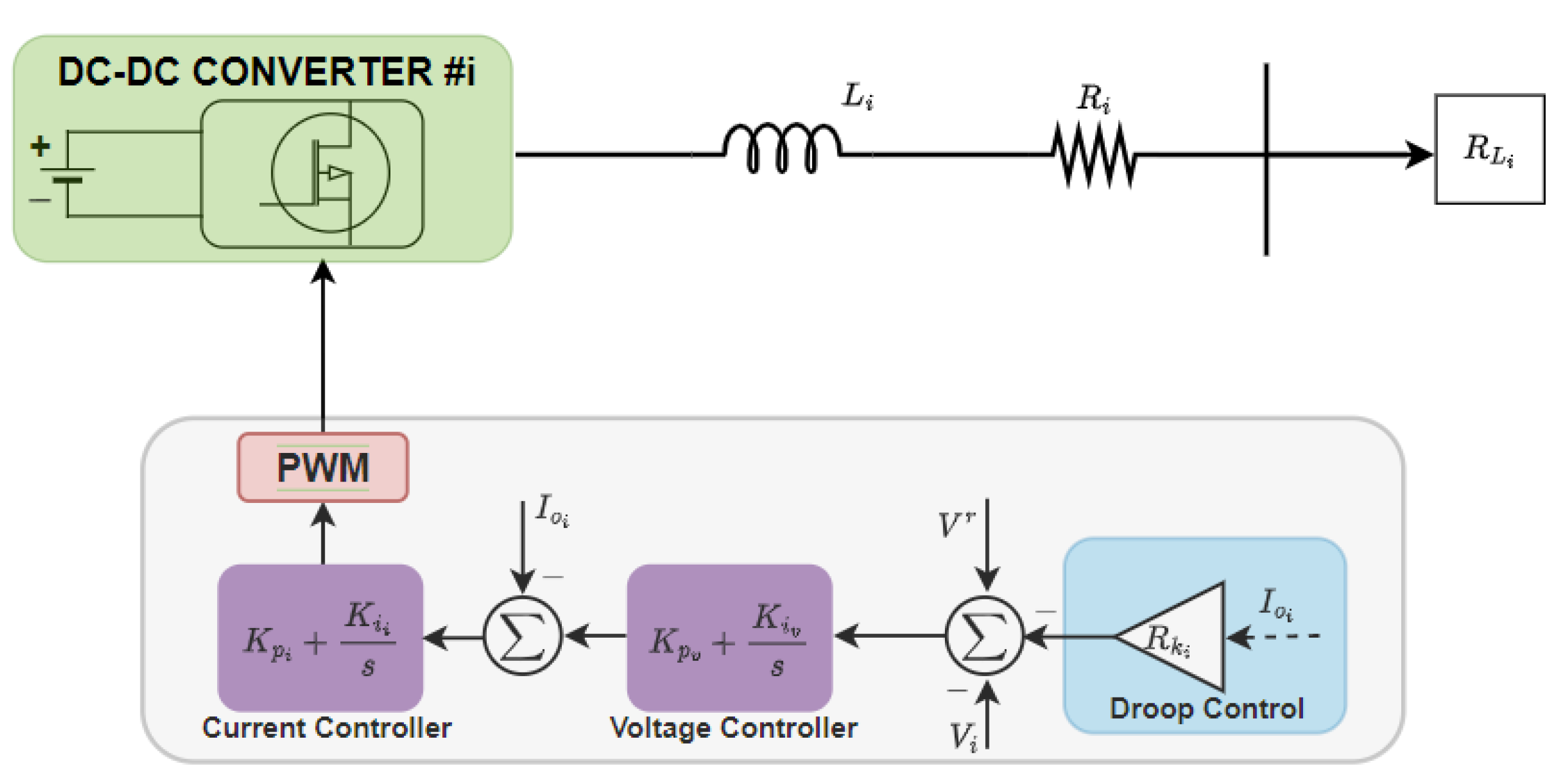
4]. The control at the primary stage comprises conventional inner voltage and current controllers based on proportional–integral (PI) controls in the converters of the DERs. In the case of parallel connections of multiple DERs, the control loop at the primary stage incorporates a droop control to establish current distribution among the DERs. In [
10], an enhanced droop control approach is introduced to address the negative impact of voltage deviation-induced circulating current in direct current MGs. To strengthen the transient capabilities of DER converters operating within the microgrids, a conventional integral controller is introduced as a droop control mechanism in [
11]. A non-linear droop control is presented in [
12] to reinforce the operational abilities of the traditional droop control, which is prone to degradation due to the impedance of the line within an MG.
Alongside the concern regarding current distribution among DERs operating within a DC microgrid, there is an impending concern regarding voltage restoration at the DC bus. This issue arises due to the voltage drop emanating from the implementation of droop control using a virtual droop resistance. Hence, ensuring voltage restoration and proper current distribution are the primary goals of the control system within the DC microgrid [
4]. In order to accomplish these goals, a secondary control loop, which can be implemented in a distributed, decentralized or centralized manner, is integrated into the control system [
3,
13,
14]. In the context of centralized control, only one central controller is employed in the secondary layer. This controller, typically PI-based, takes the error signal as input and transmits its output to the primary control of all the DERs operating within the microgrid to rectify deviations from the droop control mechanism. Susceptibility to single-point failures is one of the significant drawbacks of a centralized secondary control approach; this can have disastrous consequences for the MG [
3,
15]. Another constraint of the centralized secondary approach is the substantial communication bandwidth it demands [
3]. A decentralized secondary scheme overcomes these constraints by eliminating the need for significant communication bandwidth. The control under the decentralized secondary scheme is implemented by assigning current and voltage references for each DER operating within the microgrid to follow. Despite its ease of implementation, the decentralized secondary control scheme has the drawback of potentially degrading the overall performance of the MG. The unavailability of global communication is the reason behind this potential degradation; the controller’s output alone might not adequately offset the necessary deviation induced by the primary droop controller [
3,
16].
Due to its exceptional stability and reliability, distributed secondary control has gained significant traction in DC microgrids for attaining proportional voltage regulation and current-sharing goals in recent years [
15,
17,
18,
19]. The lack of a single central control improves system stability and reduces the likelihood of total system breakdown [
17,
20]. Employing a consensus algorithm enables a communication system with fewer connections, thereby lowering the expenses related to the communication network [
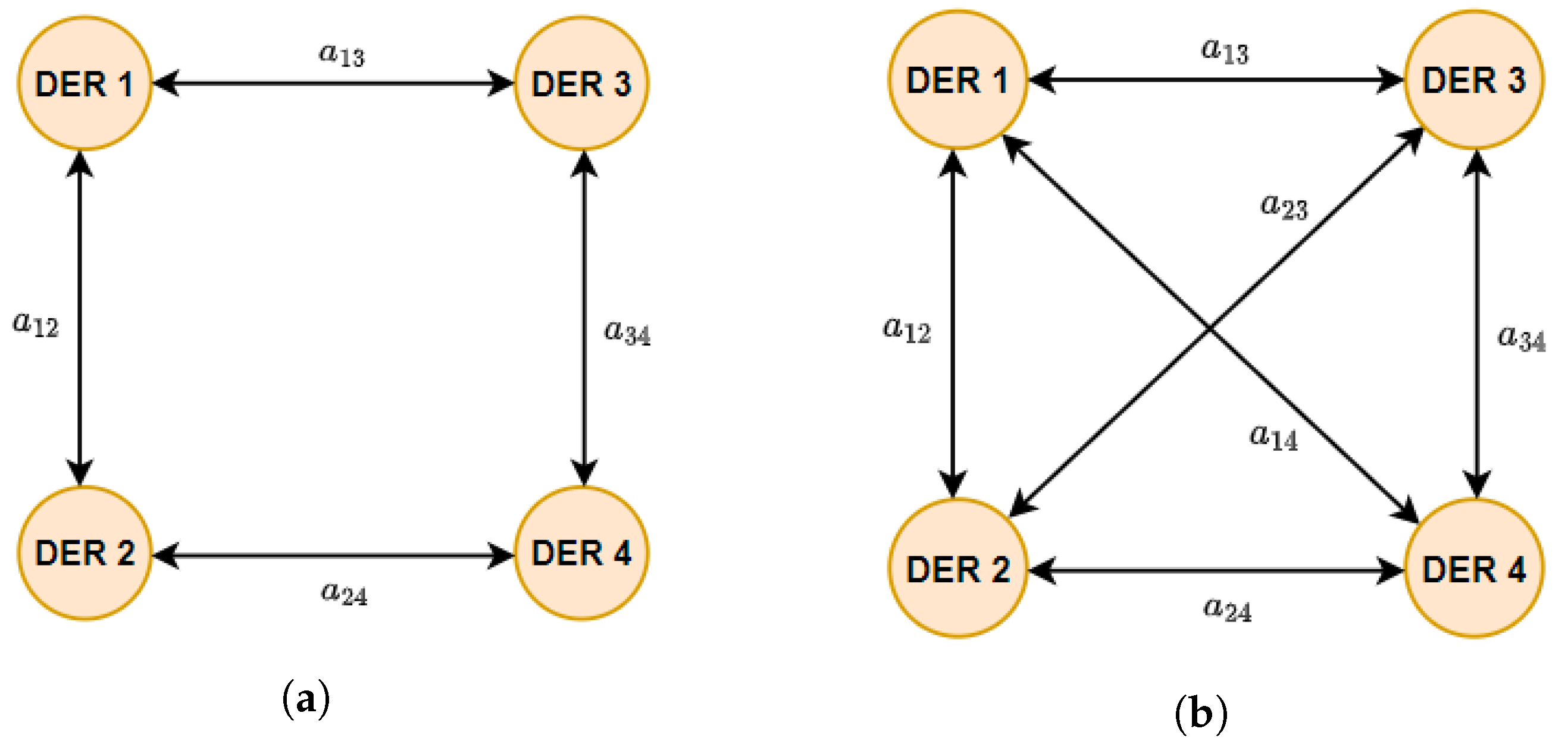
15]. This distributed secondary approach involves equipping each DER with its secondary control. These secondary controllers establish communication links with neighboring DER units through a defined topology, enabling information sharing and attaining consensus among all units [
17]. This collective operation of the secondary controllers forms a multi-agent system. This technique provides the benefit of sustaining functionality even in the event of a breakdown in a section of the communication network. Consequently, the likelihood of a single-point failure is substantially diminished [
20].
In [
21], an autonomous microgrid was equipped with a distributed secondary control, employing a multi-agent framework that is data-driven to accomplish efficient current distribution and voltage recovery within the MG. A notable drawback of this approach is its substantial computational cost. With increased penetration of DERs, the algorithm could encounter an overwhelming computational burden regarding parameter estimation. This is due to the extensive number of parameters that may necessitate vast datasets for efficient training, demanding significant computing resources and time. The potential impact of communication delays or failures was also not discussed. An improved power distribution technique for multi-bus direct current MGs was proposed in [
22] to eliminate voltage variations by considering the intermittent change in time delays. An anti-heterogeneous time delay estimator based on scattering transformation and a PI consensus algorithm was utilized to achieve accurate power sharing and voltage compensation in a distributed manner. Despite achieving power allocation and voltage compensation, the secondary controller design requires periodic communication, which may foster communication redundancy. In [
23], a distributed voltage regulation and power distribution technique for a stand-alone direct current MG is designed using an aperiodic event-triggered communication topology. Also, in [
24], an event-triggered distributed control technique for microgrids was introduced, and the algorithm put forth attained the secondary control objective within a directed graph structure, making it applicable for situations under less robust communication conditions. However, the event-triggering algorithms proposed in these methods do not consider the impact of communication time delay and the line capacity limit. Taking into consideration the effects of communication time delay, a distributed control approach utilizing the PI consensus algorithm was also introduced in [
25] for DC microgrids. This approach simultaneously achieves bus power distribution and voltage restoration within a single controller, simplifying its complexity and ensuring that control accuracy remains unaffected by time delays. In [
26], a consensus protocol-based distributed secondary control was developed to tackle voltage restoration and current distribution challenges within a direct current MG. This method employs a pair of PI controllers, with one designated for equitable current distribution and the other concentrating on voltage restoration. The correction signals originating from these secondary controllers are disseminated to their corresponding local primary controllers. Although the implementation of this technique is straightforward, the error correction term it offers does not align with the required correction term. Consequently, this mismatch may lead to a degradation in control performance. A distributed supervisory control system is presented in [
5], facilitating the seamless transition between two distinct secondary controllers. These distributed controllers are designed for voltage recovery and current distribution within the direct current MG. The shortcomings of this approach encompass the transients resulting from the continuous operation of the switching circuit and the difficulty associated with configuring multiple controller coefficients. The idea of virtual voltage drop (VVD) as a control parameter was introduced in [
6] as an approach for designing secondary control in direct current MGs. It was demonstrated that by combining the VVD concept with a dynamic averaging algorithm, both voltage restoration and effective current sharing could be achieved, but the effect of communication time delay on the controller was not considered. Based on VVD, an event-triggered secondary control method was introduced in [
27]. The employment of the event-triggering mechanism efficiently decreases redundancy in signal transmissions. Through the combination of a time-varying droop gain and VVD, the distributed control approach presented in [
28] ensures voltage restoration and adaptable current-sharing capabilities, making it adaptable to various operational scenarios. In [
29], a distributed fixed-time secondary control technique based on VVD is proposed. This controller can effectively attain both accurate voltage regulation and current distribution within a predetermined settling time. Despite the advancements in these control techniques mentioned above, none of the authors considered the impact of transmission line impedances. In [
30], a secondary controller that combines discrete and continuous signals is introduced. In this control approach, the exchange of current signals among converters only occurs at discrete intervals, resulting in the achievement of control objectives with a reduced communication burden. In [
19], a secondary distributed control scheme for a stand-alone direct current MG is proposed to maintain proper power distribution and voltage regulation. The microgrid incorporates multiple energy storage technologies, considering transmission delays. However, only resistive loads were considered in the above control techniques, and no theoretical guarantee was provided for constant power load. The effect of DER plug-and-play was also not considered. In [
31], a distributed linear multi-agent consensus protocol was utilized to develop a leader–follower consensus algorithm for the secondary layer of multiple battery energy storage units to achieve voltage control and balanced power distribution, while a distributed voltage observer was proposed in [
32] for a similar DC microgrid. The drawback of the posited leader–follower algorithm is the substantial deviation in the bus voltage when the leader breaks down. In [
33], a distributed control approach is proposed, which combines the voltage and current sharing error as inputs to the control within the secondary control layer. This approach employs the pinning gain technique to ensure that only one secondary controller within the system can access voltage measurements, given that voltage regulation is a common objective. One main drawback associated with this approach is the latency impact when switching voltage control between the distributed controls. In [
34], a line-independent plug-and-play voltage control technique was proposed for MGs. This approach ensures a stable voltage regulation performance in a decentralized manner, which allows for scalability. Nonetheless, the system performance is prone to degradation due to the lack of global communication. In [
35], a solution for managing high-volume data traffic to attain optimal power flow in MGs was presented. This was accomplished by introducing a distributed power management scheme designed to function over a low-bandwidth wireless network, relying on inputs from just two sensors. As a result, the data necessary for successful operation are significantly reduced. While the architecture offers plug-and-play capabilities to the system, the impact of communication delays was not considered in the approach. In [
36], a control framework based on power buffering is implemented for direct current MGs, aiming to restore the plug-and-play functionality of grid-forming units while simultaneously achieving specific control performance of the MG. However, incorporating power buffers into the control framework will unavoidably raise the total system cost. The effects of loading conditions on the control performance were also not considered.
In addition, the distributed control approaches discussed in all the aforementioned overviews are based on the conventional linear control approach. These controllers have limitations when handling non-linear loads.
Table 1 presents a more in-depth comparison between the proposed technique and the previously discussed methods. To control current and voltage, a PI controller is typically employed to eliminate steady-state errors. Nevertheless, a PI controller excels in terms of performance when dealing with specific load points. Satisfactory performance in full-load or different load scenarios may not be guaranteed [
37]. Fuzzy logic schemes are recognized as a viable option for addressing control issues in developing power grids, particularly DC microgrids, offering a more resilient solution with improved reliability [
38]. Controllers based on type-I fuzzy logic schemes are widely regarded as the most prevalent form of fuzzy control due to their ease of design and minimal requirement of system model knowledge. They have achieved considerable success in addressing diverse power system issues [
38,
39]. Nonetheless, a notable drawback of type-I fuzzy logic control schemes is their limited ability to effectively manage uncertainties inherent in dynamic environments, such as those encountered in direct current MGs [
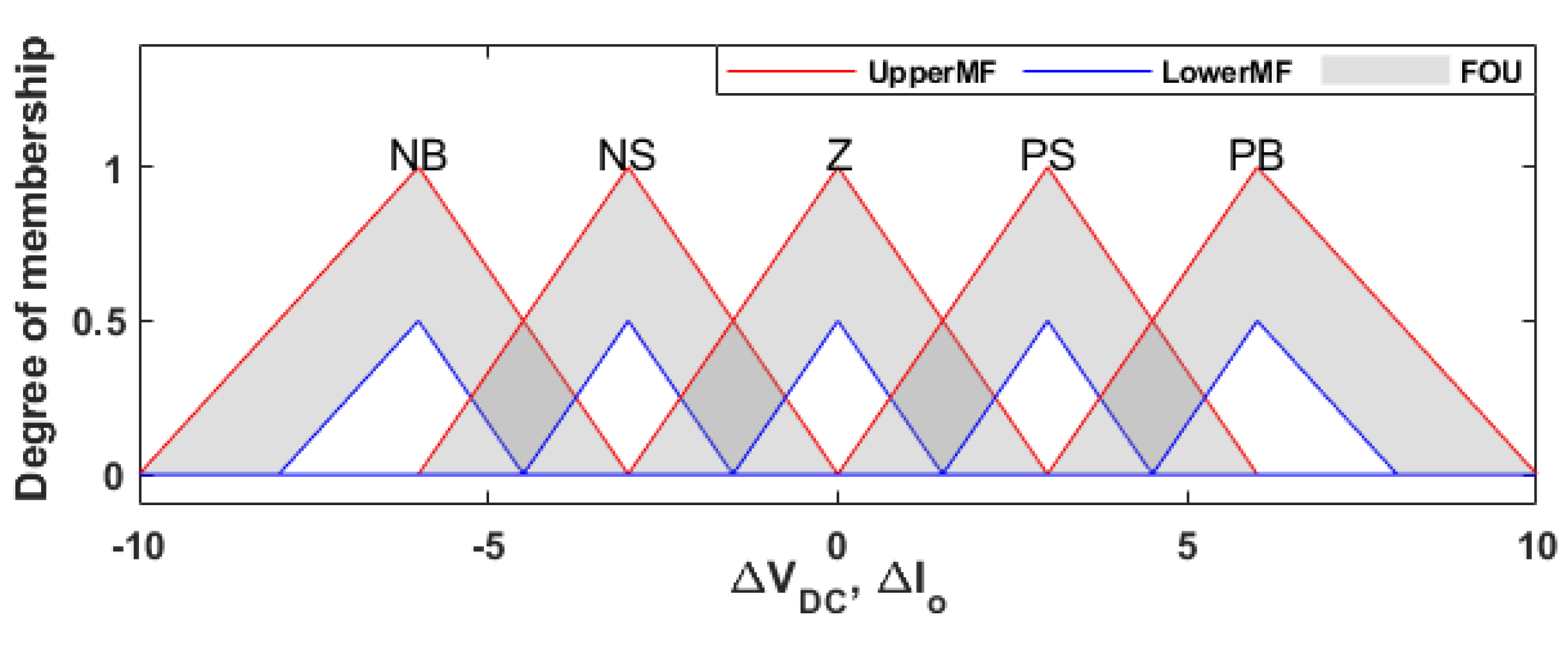
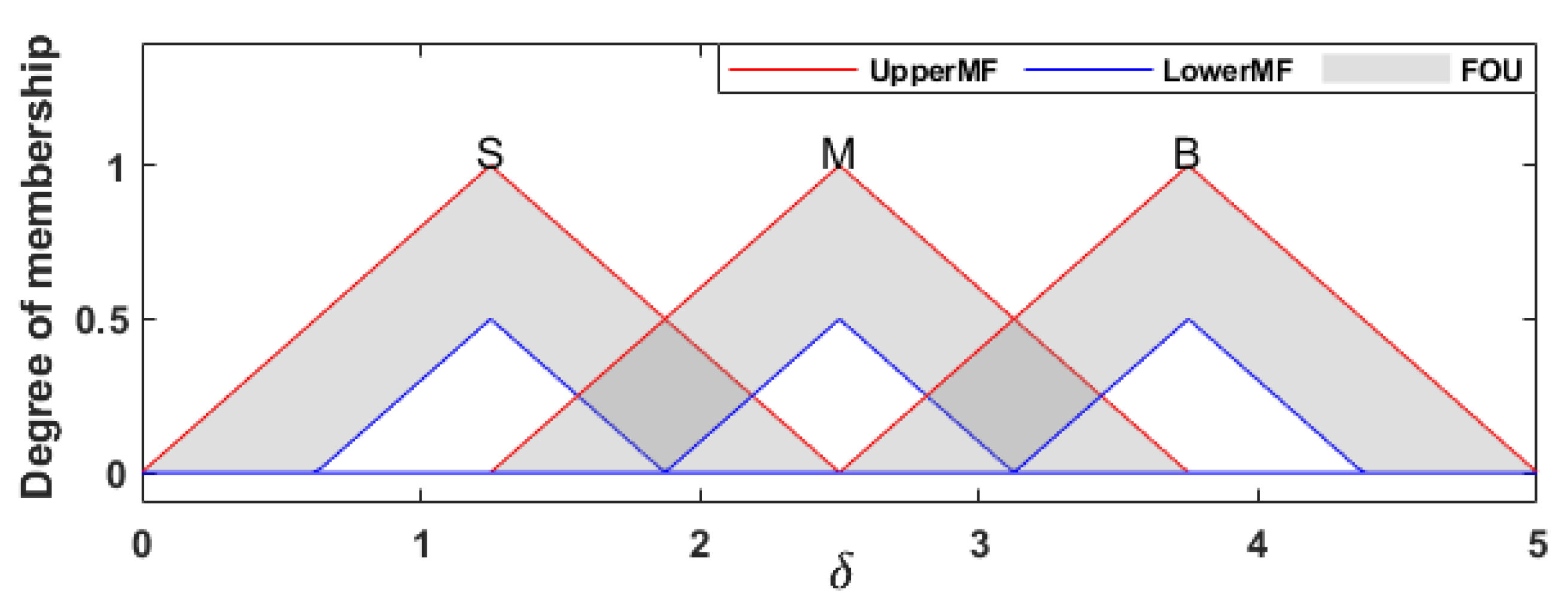
40]. Therefore, to address these external disturbances and uncertainties, type-II fuzzy logic schemes have emerged as a proficient control technique due to the additional degree of freedom they offer in their output by incorporating the uncertainty footprint, which enhances their ability to handle such challenges [
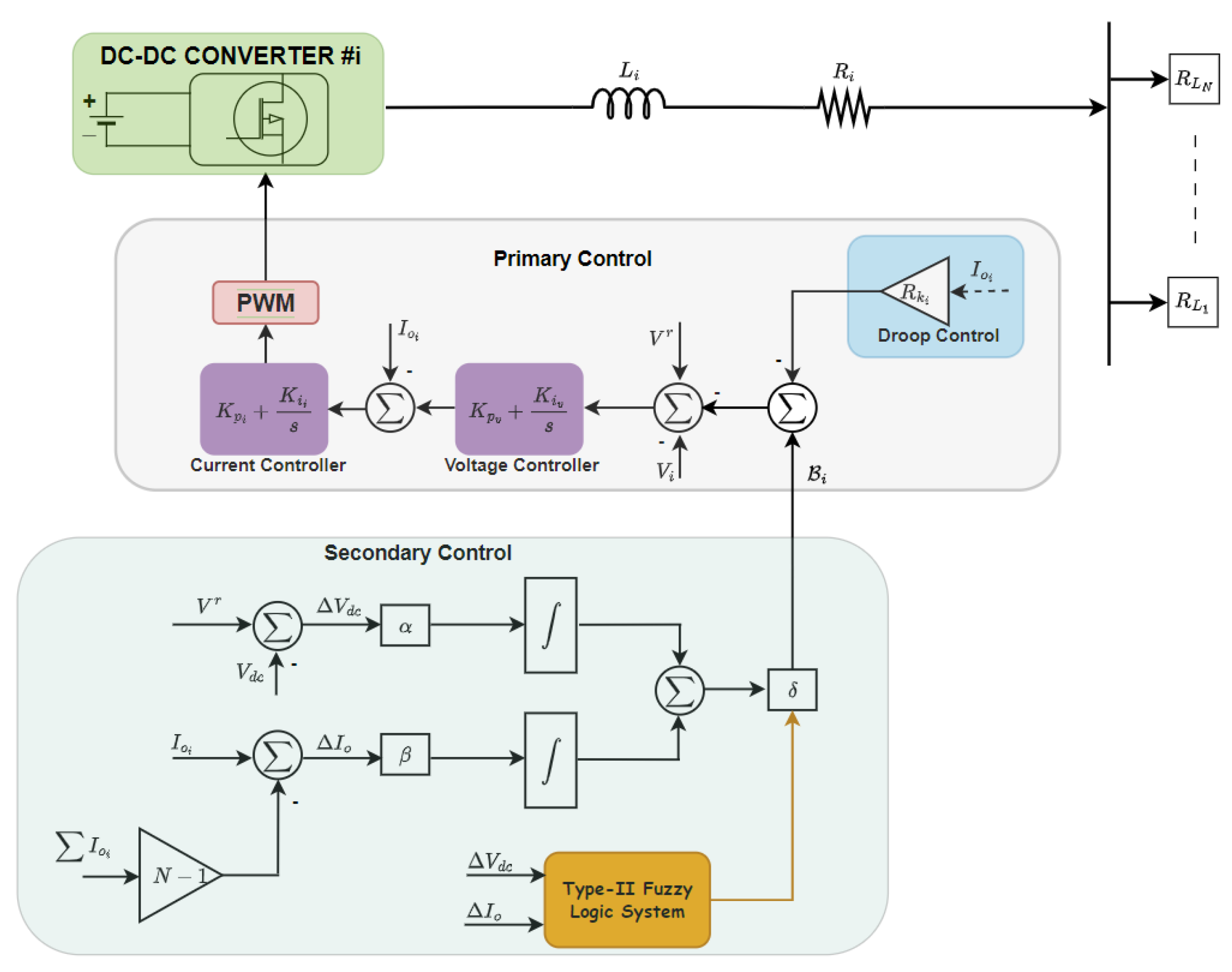
41]. Therefore, this research introduces a novel distributed secondary technique designed for a stand-alone direct current microgrid, incorporating two integral-type candidate controllers and a type-II fuzzy logic controller. This technique endeavors to simultaneously achieve a dual purpose: attaining equitable current distribution among the different components of the microgrid and maintaining the bus voltage at the designated operational DC voltage. The first controller utilizes a bus voltage feedback system to regulate voltage, while the second controller employs a balanced current feedback system to manage the current distribution within the microgrid. In order to bolster the flexibility and resilience of this secondary distributed control, a type-II fuzzy logic control scheme is integrated to adaptively compute the controller parameters based on the magnitudes of the voltage and current errors. The control signal, generated by the secondary controller, is utilized as the reference signal for the primary control loop of each DER, aiming to offset any deviations from the droop.
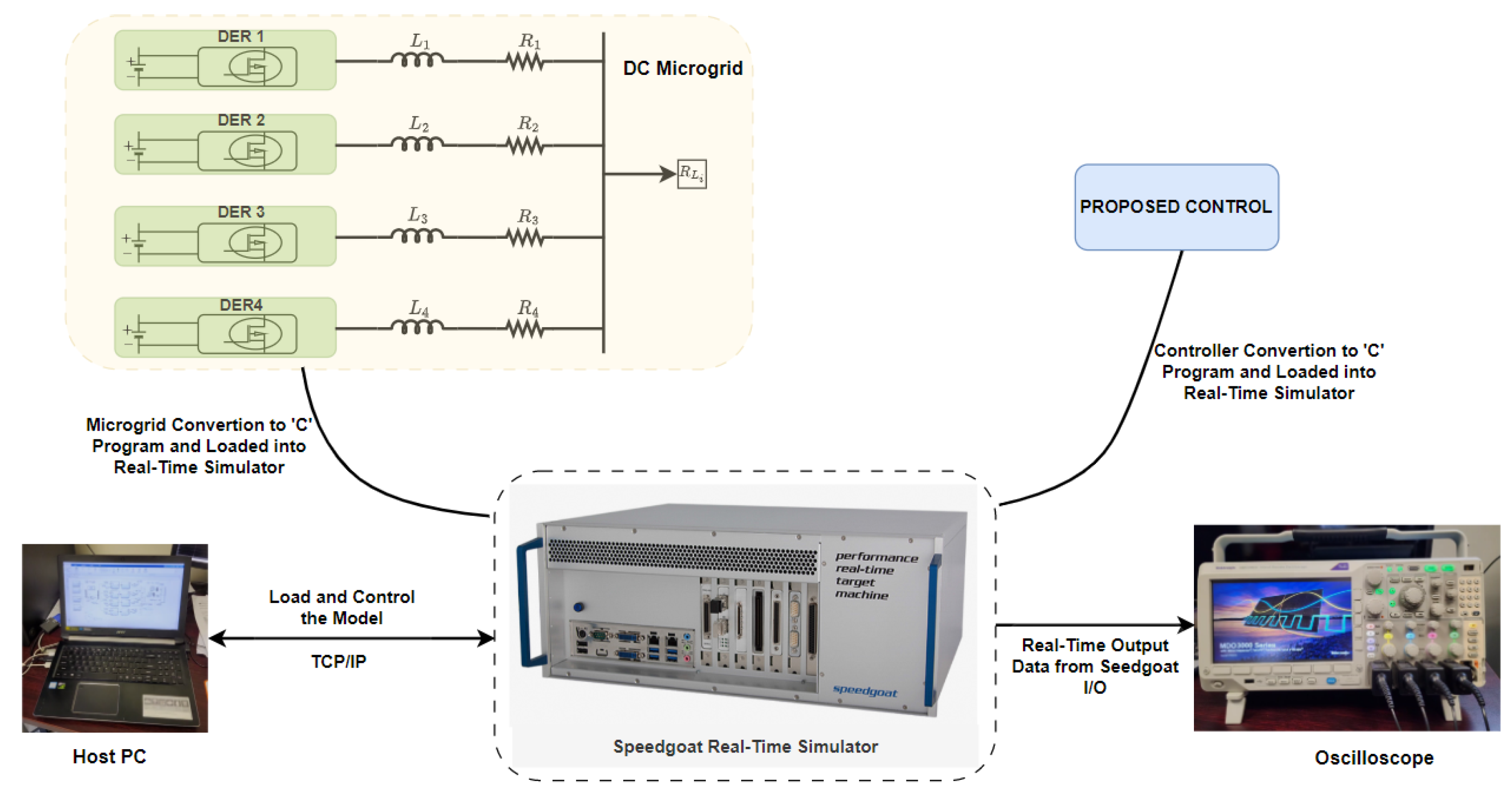
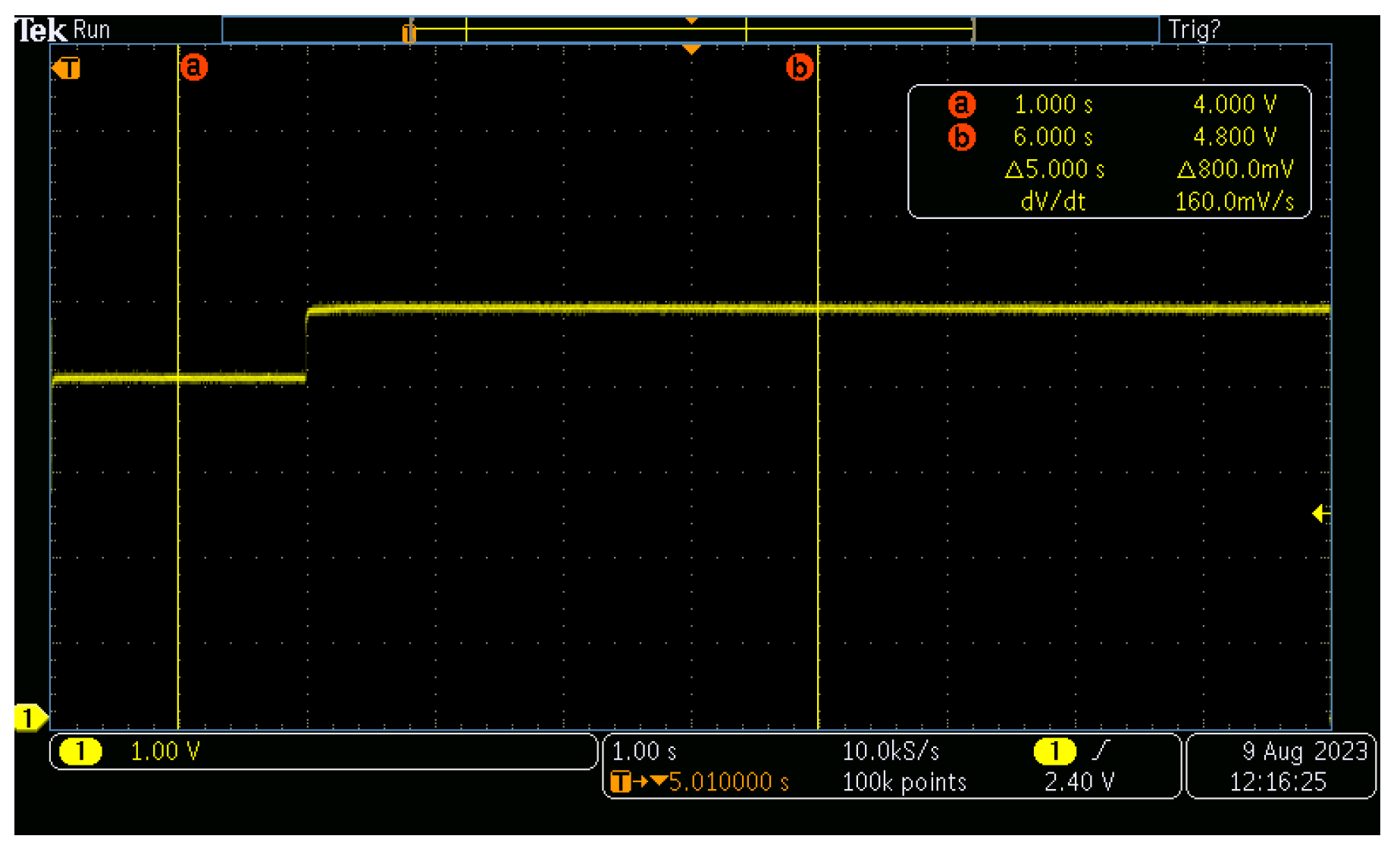
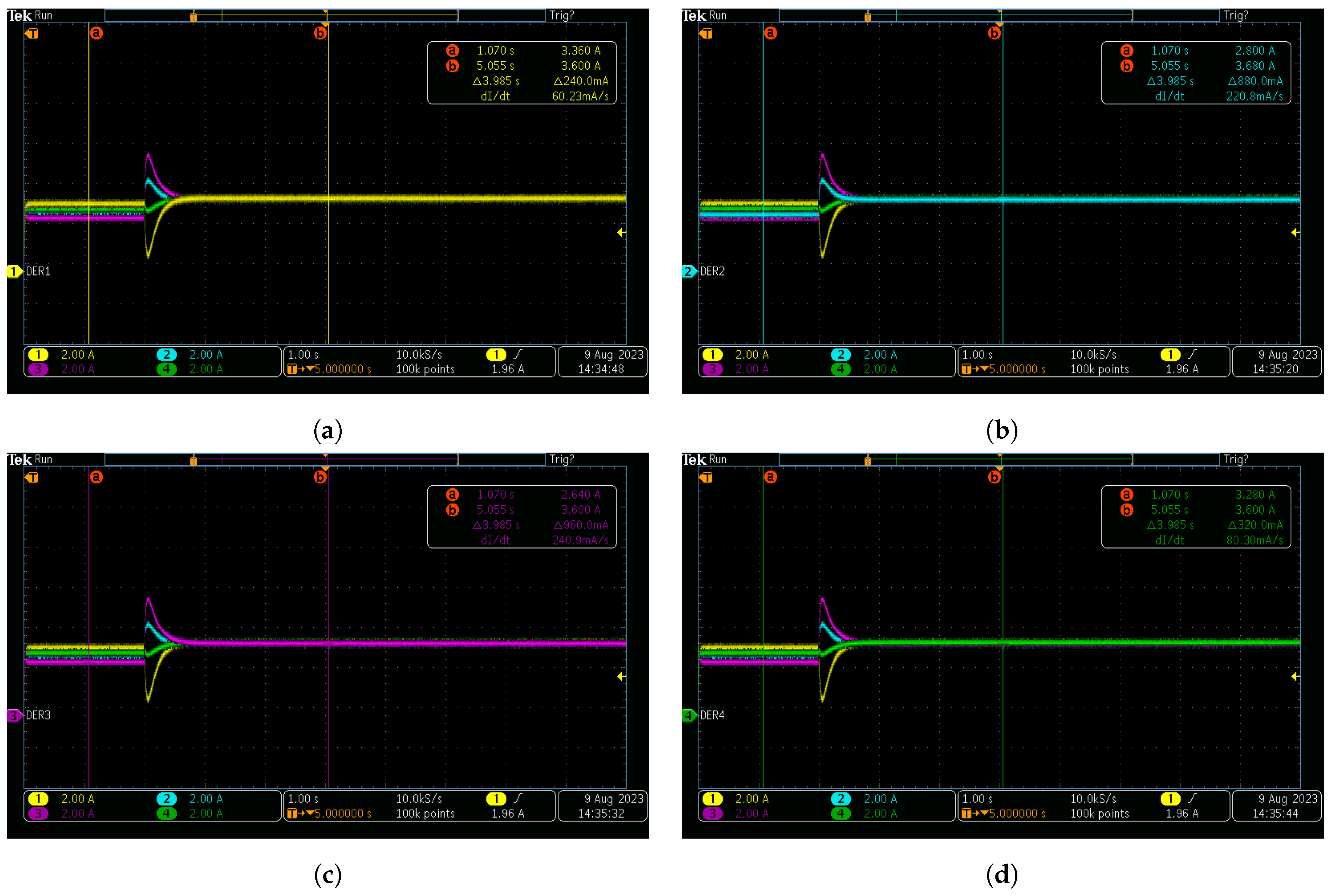
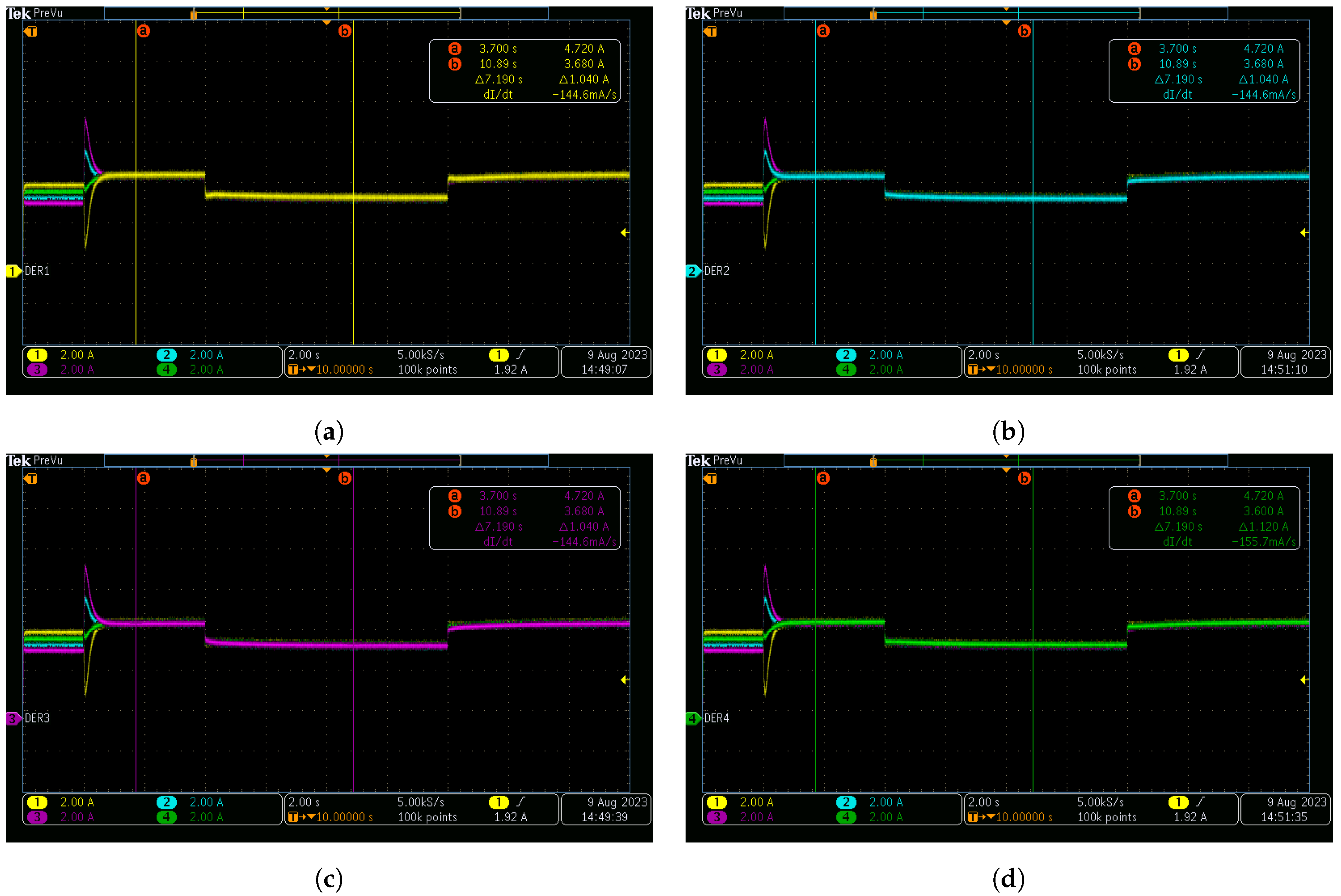
The secondary control approach put forth effectively attains a consensus output similar to centralized control by leveraging a communication network that facilitates interactivity among neighboring controllers. Lyapunov analysis has been employed to establish sufficient stability conditions for the controller proposed in this research. In addition, the proposed technique has been devised to be entirely distributed and capable of managing both linear and non-linear loads, providing proper performance despite the plug-and-play and communication link breakdown. Moreover, during the control parameter design, the proposed control does not require information about the line resistances, yet it achieved a thorough stability analysis. In order to evaluate the efficiency and robustness of the introduced distributed secondary control approach in attaining voltage restoration and equitable distribution of current within direct current MGs, real-time experiments were conducted across diverse operational scenarios employing a Speedgoat real-time digital machine.
The article’s organization is structured as follows.
Section 2 delves into the mathematical modeling of direct current MGs.
Section 3 presents the test model of the direct current MG featuring the innovative type-II fuzzy-based secondary control system. An examination of the simulation results, accompanied by an in-depth discourse, is outlined in
Section 4.
Section 5 showcases a real-time experimental execution of the proposed secondary control to verify the outcomes derived from the simulations. The final section of this article provides a summary and conclusion for the entire body of research.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}