


Charging Scheduling of Hybrid Energy Storage Systems for EV Charging Stations



Abstract
:1. Introduction
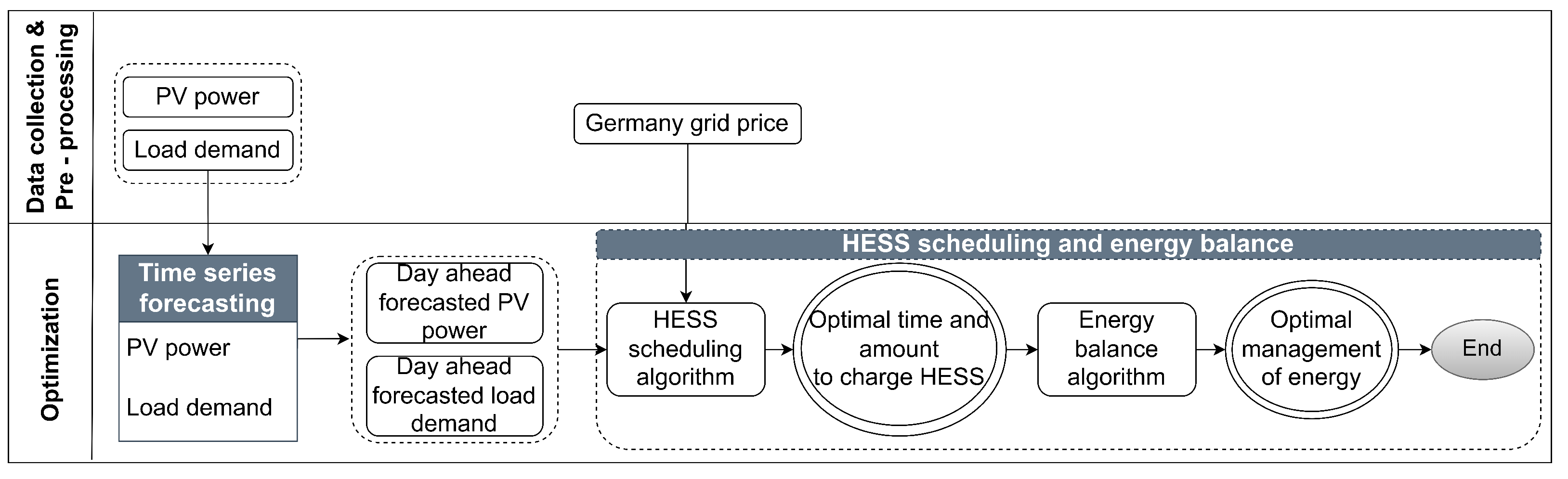
- In the first and second stages, the PV power and load demand are forecasted to provide vital insights into the upcoming energy status for optimal energy management.
- In the third stage, a scheduling algorithm is implemented based on the outputs of the previous stages to predict the best times for charging the HESS, while maximizing the PV power utilization and minimizing the grid energy costs.
2. Proposed Approach
- A HESS made up of a lithium battery with a capacity equal to 220 kW and a metal-free redox flow battery with a capacity equal to 400 kW. The topology used in our HESS is a DC-DC converter. The battery with a high capacity is mainly used to meet the load demand, and the second battery is used as a support. In our system, the utilization of renewable energy (i.e., especially PV energy) to charge the HESS is a high priority.
- The sources of energy used in our system are PV energy and grid energy. In each charging station, a PV field is built. The grid is used to provide energy to our system when the PV is not sufficient to meet the demand.
- Three charging connectors: these are the terminal connections that are linked to the EV and the charging cable. In our system, we have two fast charging cables and one normal charging cable.
3. PV Power Forecasting
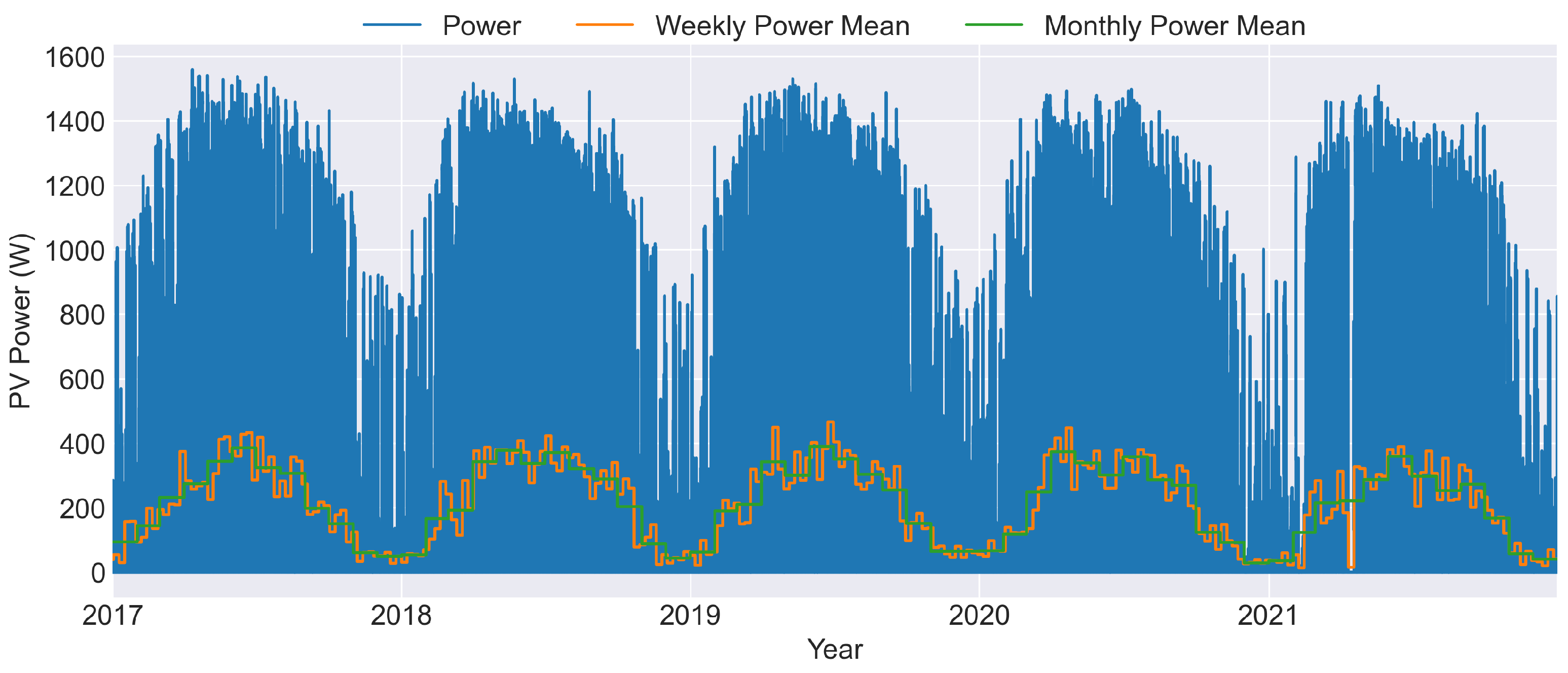
3.1. Data
3.2. Data Pre-Processing
- First, duplicate data entries in the dataset, which had the same datetime index and identical power values, were removed from the dataset. Furthermore, the dataset was further analyzed by month and week of the year. During that analysis, outliers were identified and removed. The missing values were estimated using mean imputation [26,27], which employs a time-based average. This approach filled in the missing values by averaging data from the preceding year with a similar date. It was a feasible strategy because of the similar value of PV power generation at the same time intervals over the years.
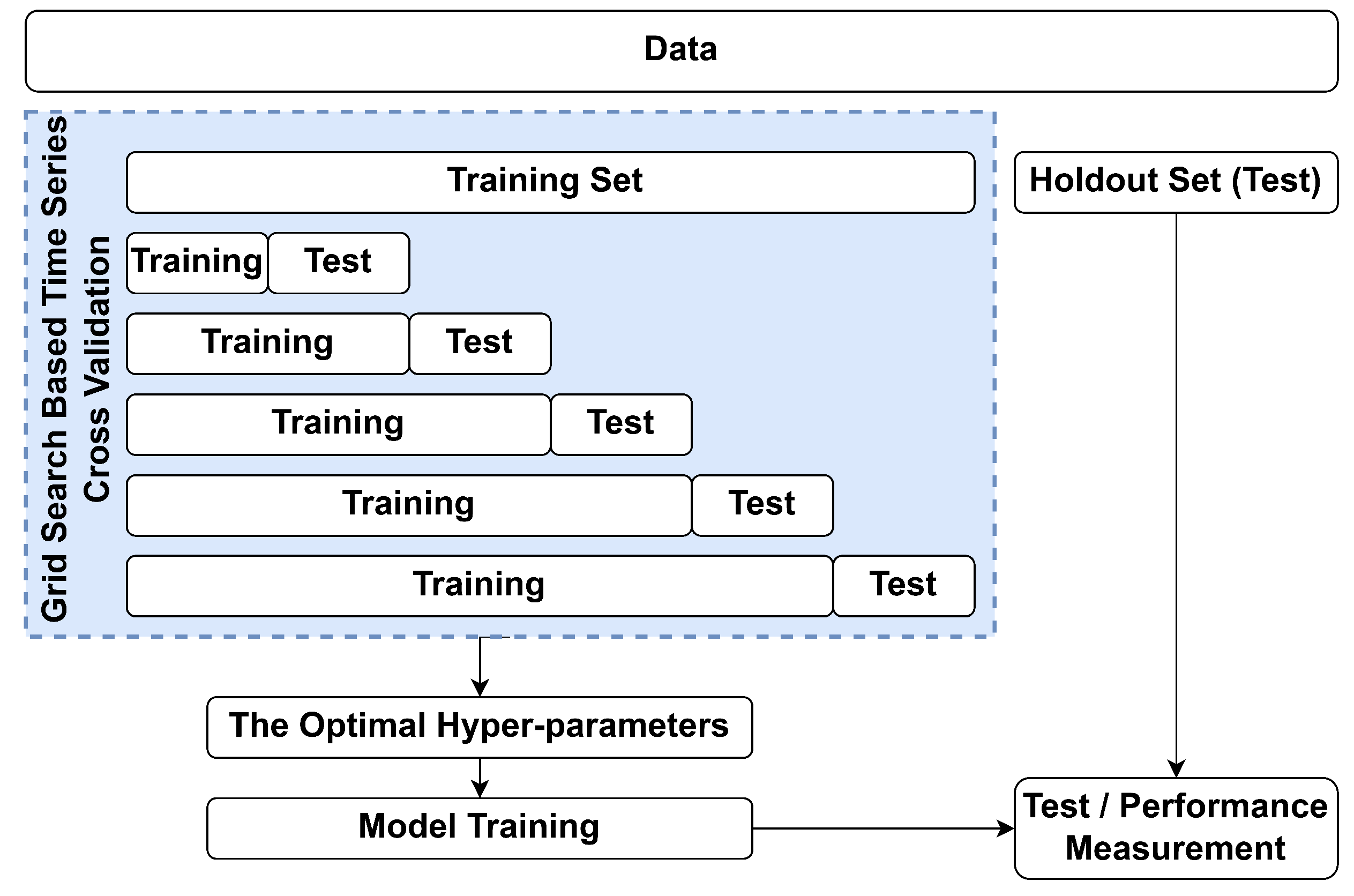
- Second, the dataset was split into a training dataset (80%) and a test dataset (20%). The training set included PV power data at 15 min intervals from January 2017 to December 2020, while the testing set covered January 2021 to December 2021. Additionally, time series cross-validation was implemented during the model training phase to ensure a robust model evaluation and mitigate the risk of bias associated with specific years, such as 2017 or 2021, when external conditions might have influenced patterns.
- Third, two prominent scaling methods, z-score normalization and min-max scaling, were compared using the test dataset [8,19]. The outperforming min-max scaling was utilized. The min-max scaler was fitted using only the training data to prevent data leakage. Using both training and test datasets could introduce reference points from the test set, potentially influencing the values of the training data and causing data leakage [28].
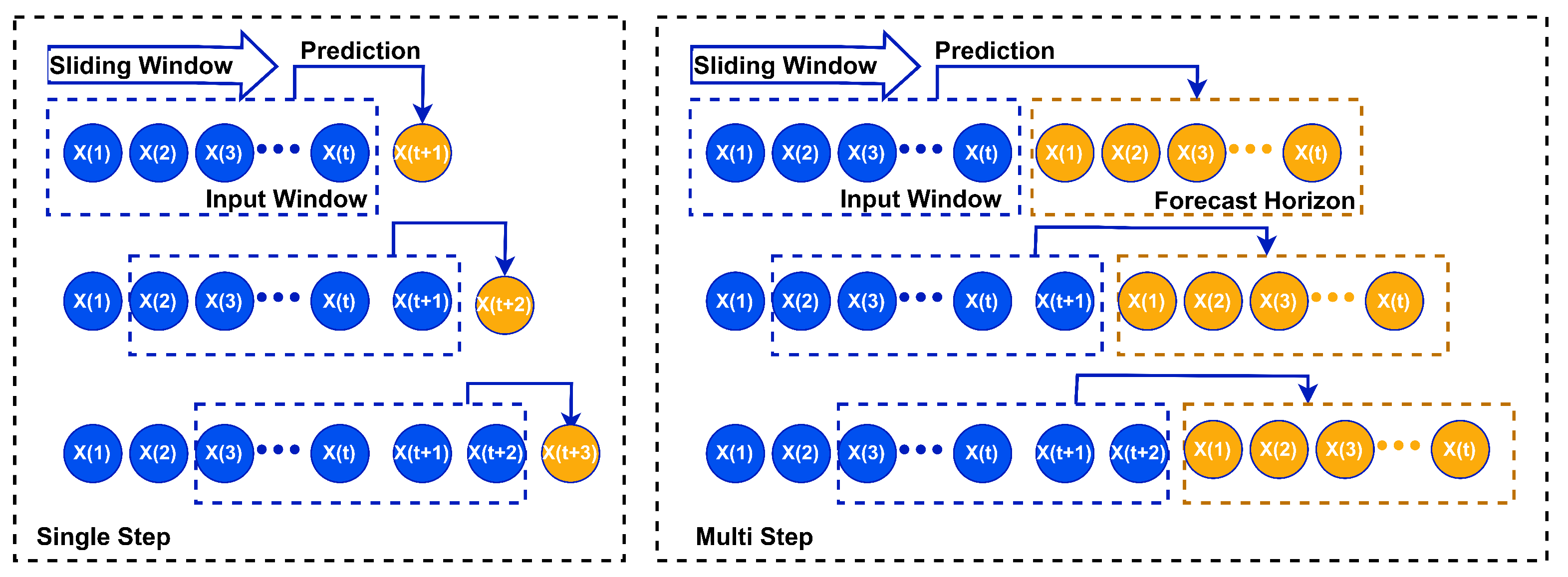
- Fourth, the sliding-data-window approach was adopted to generate input–target pairs [29], thereby framing the forecasting procedure as a supervised learning task [30]. A fixed-size window slid throughout the PV power time series data; the window size was a sliding window specifying the value for the input. The PV power at the forecast horizon was used as the target, as illustrated in Figure 4. In this work, different window sizes for PV power forecasting were examined, and the one with the lowest mean squared error (MSE) was selected. For one-step forecasting, a window size of 96 was selected to predict the horizon number 1. On the other hand, for multistep forecasting, a multi-input multioutput (MIMO) strategy [31] was utilized. A window size of 288 was used with a 96-h forecasting horizon. PV power generation is strongly influenced by daily patterns, such as sunrise and sunset times; by using a daily window size period, the model can capture these daily cycles and learn the underlying patterns in PV power generation.
- Lastly, numerous zero (nighttime) values in the dataset cause data sparsity and make forecasting challenging. Some research handles this data sparsity by working only on daytime values [6,32]. We handled this issue by trying different scaling methods and activation functions. Min-max scaling with a sigmoid activation function on the dense layer of the model further improved the performance in handling night values.
3.3. Model Training and Validation
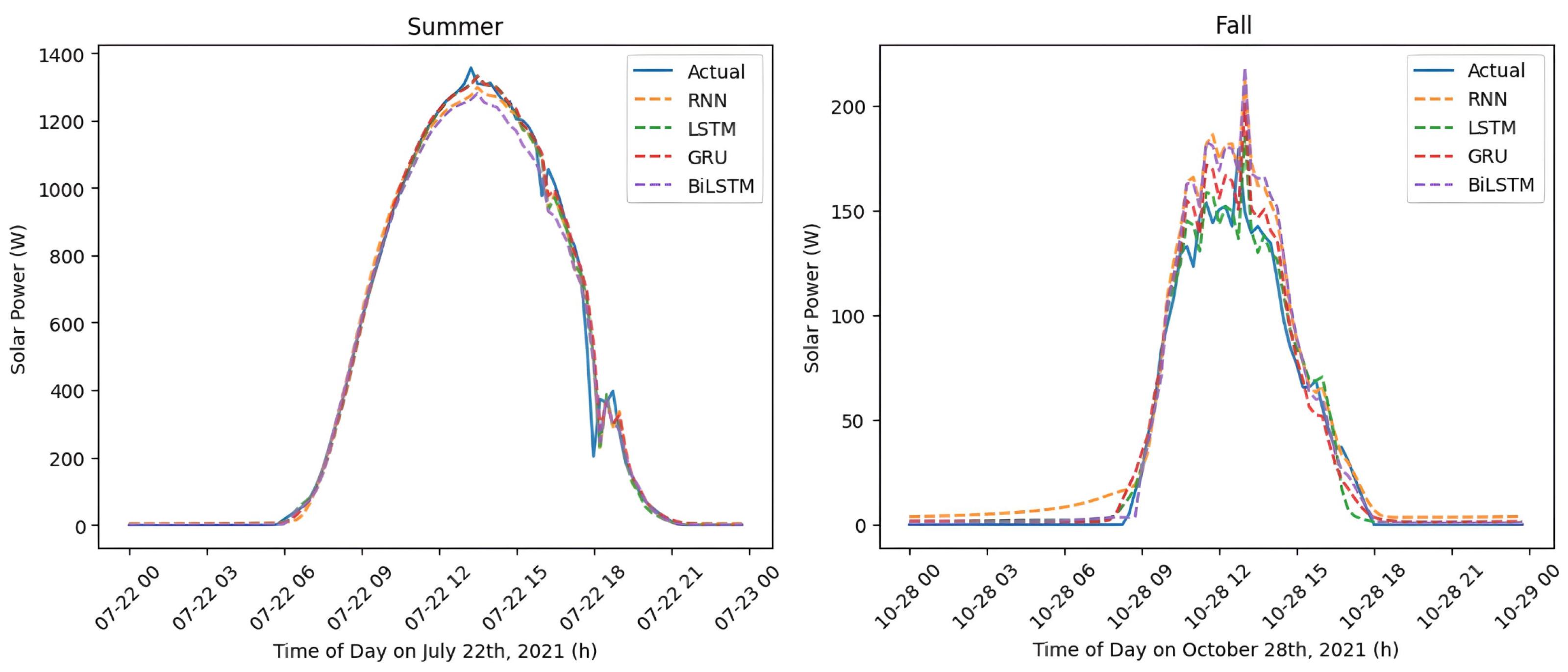
3.4. Results
Comparison of Seasonal Point Forecast
4. Load Demand Forecasting
4.1. Dataset Description
4.2. Data Preprocessing
4.3. Model Training and Validation
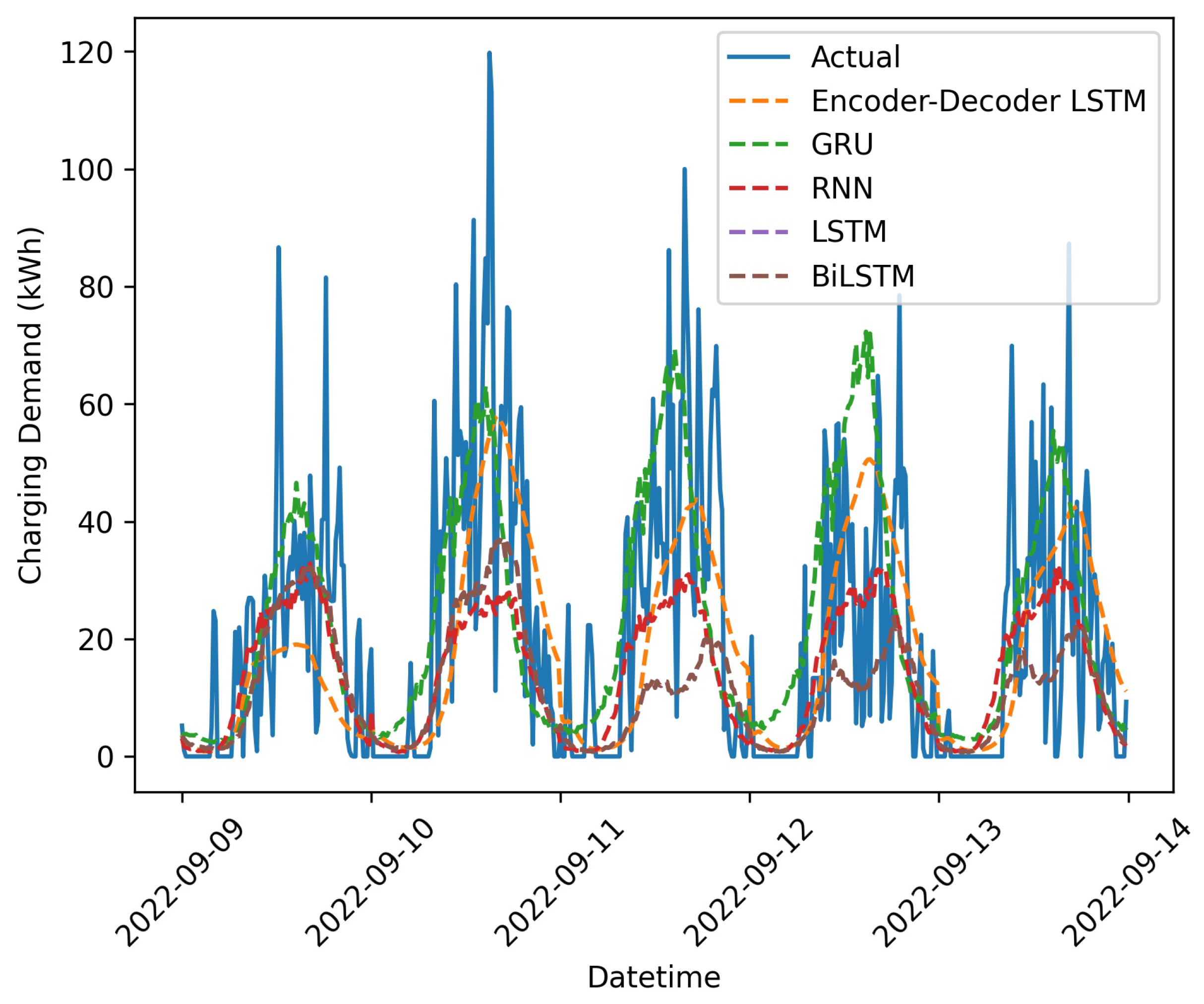
4.4. Results
- LSTM and GRU had the lowest RMSE for all locations. It is worth noticing that the GRU-based model did better with fewer epochs than the LSTM model most of the time, indicating that it was more efficient because it required less memory and fewer training parameters.
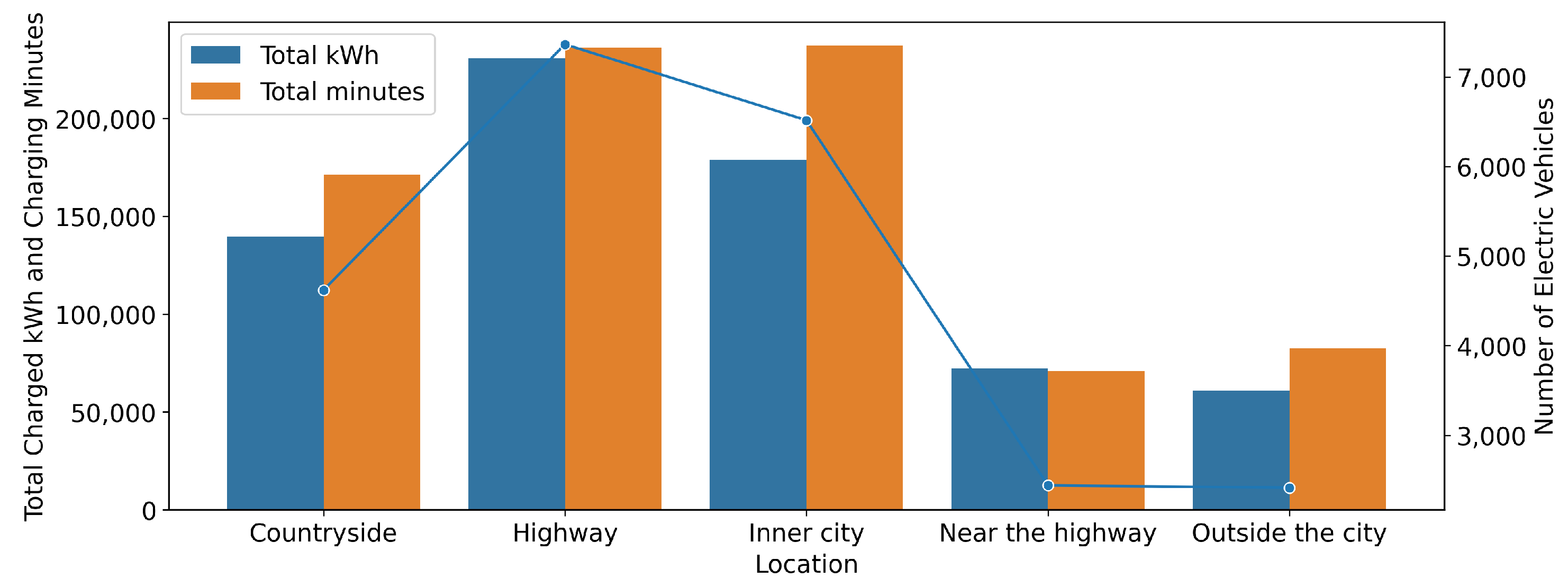
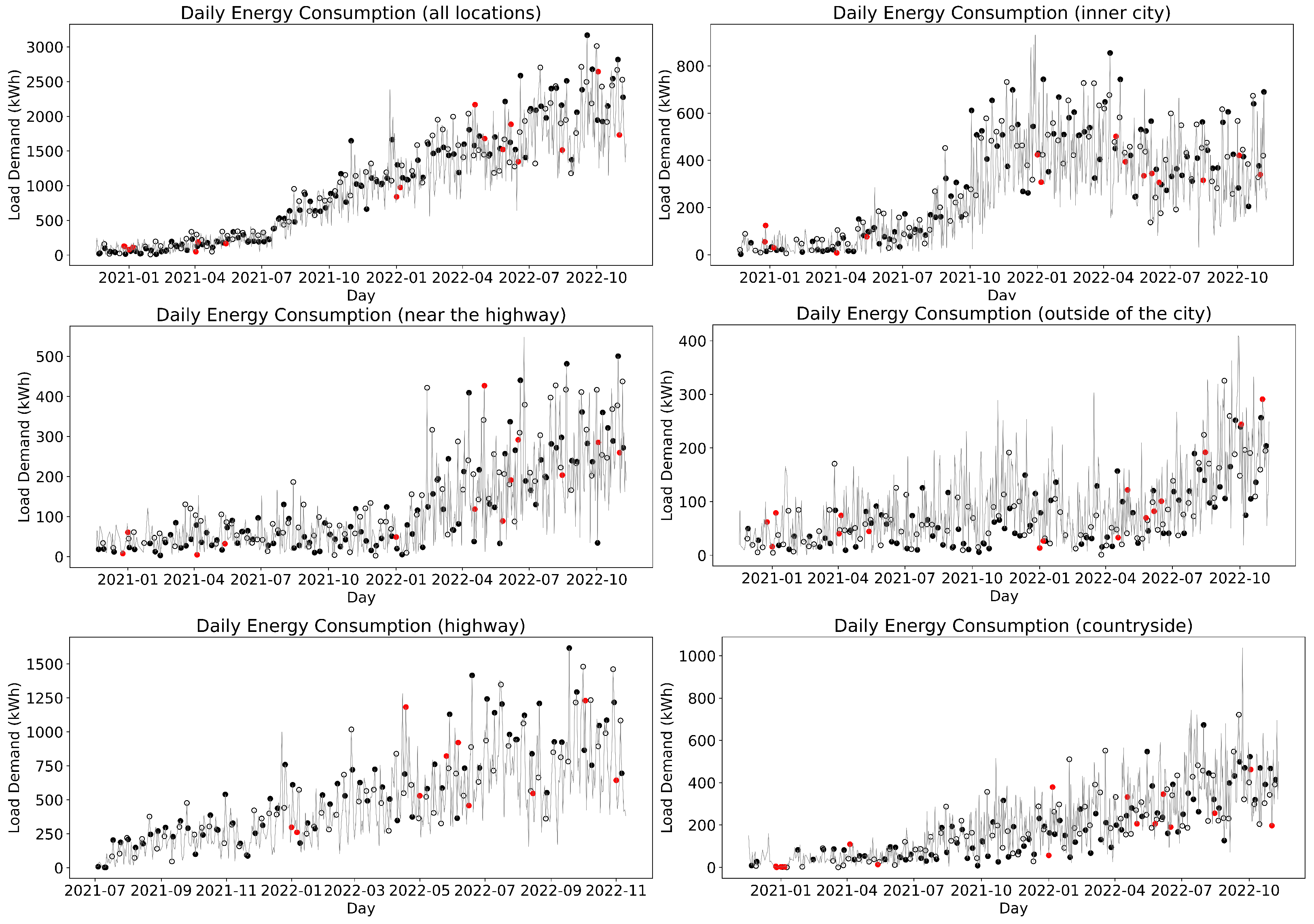
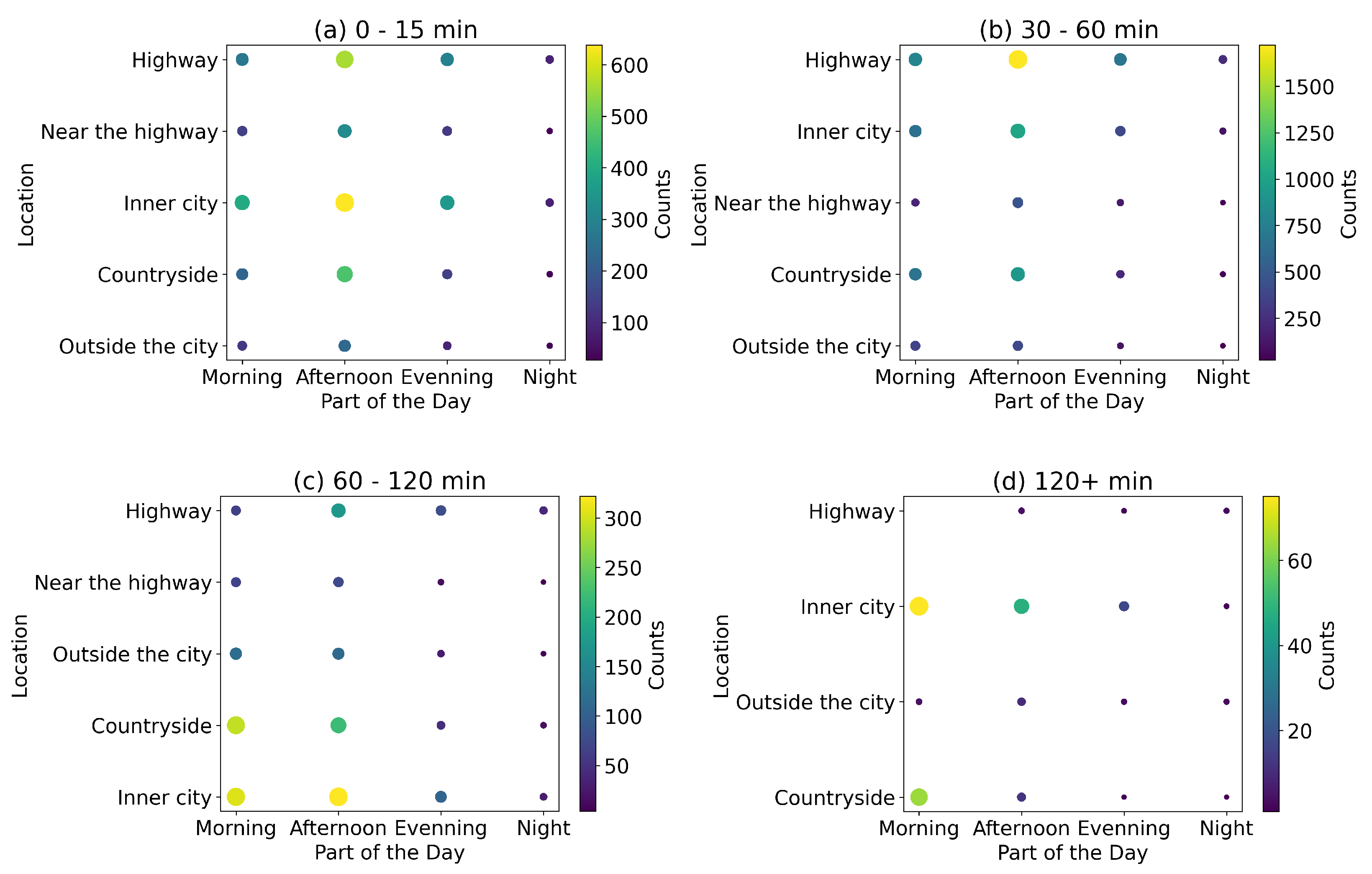
- Forecasts using individual data were more accurate than those based on aggregated data. The accuracy of individual data varied by location. Locations such as the inner city and the countryside achieved better results than other places. This may be due to the charging duration. As illustrated in Figure 10, drivers in the inner city and in the countryside tend to charge their EVs for a longer time, creating a steady two-hour (eight steps) charging pattern. This stability simplifies the prediction for the next steps.
- The fluctuations of the highway daily demand ranged from 0 to 1400 kWh (see Figure 9), which made it more challenging to accurately predict the demand compared to other locations, where the variability was much less.
- Charging sessions might show more variability due to the low frequency of long-term charging on the highway, as indicated in Figure 10. This high number of charging sessions could be due to higher traffic volumes or more transient populations. The proposed model provided more accurate forecasting results for each location apart and a longer charging duration.
5. HESS Scheduling Optimization
5.1. Principle of the HESS Scheduling Algorithm
| Algorithm 1 Scheduling algorithm |
|
| Algorithm 2 Energy balancing algorithm |
|
- Energy efficiency: PV power was the main used energy source to meet the demand, and excess PV energy was stored in the HESS.
- Optimization of battery charge/discharge profile: Unlike fully charging or deeply discharging the battery [65], our approach charged the battery with only the required amount of energy needed to maximize solar energy utilization and reduce costs, based on the generated PV power, low energy cost, and battery constraints [65]. This approach inherently contributes to the battery’s overall lifespan by avoiding extreme stress [66]. Furthermore, maintaining a certain discharge limit in the battery can provide a buffer for potential urgent situations where higher energy is unexpectedly needed.
- Cost minimization: Cost minimization was applied first by prioritizing PV power consumption and second by using the grid during the cheapest electricity price time through the following steps of the “Scheduling Algorithm”:
- Prioritizing PV power consumption: When PV energy generation exceeds demand (Lines 4–23), denoted as set S, it calculates the total required energy to meet the demand from the current time until the time in set S (Lines 10–12). If the HESS’s state of charge (SoC) at the current time is sufficient to meet the required energy, the algorithm balances the energy utilization and updates the system status (Lines 13–15). If the SoC is insufficient, the algorithm finds the cheapest time (set G) between the current time and the time in S. It calculates another required energy between the current time and the cheapest time in G. Then, the second required energy amount is subtracted from the first required energy amount to find the amount to be purchased from the grid at the cheapest time in G (Lines 17–23).
- Optimizing grid usage when PV generation is below demand: In scenarios where PV generation does not exceed demand until the end of the day (Lines 25–37), the algorithm calculates the total required energy for the remaining day (Line 26). If the SoC at the current time can fulfill this required energy, the energy balance is achieved (Lines 27–29). If not, the algorithm identifies the next cheapest times for energy purchases (Lines 31–36).
- Real-time data: The system was developed and tested using real-time datasets to represent a realistic scenario.
- Single algorithm: The system employed a single algorithm for scheduling throughout the day instead of separate algorithms for daytime and nighttime [67]. This provided a more practical approach, considering seasonal changes in daylight hours.
5.2. Simulation Setup
- The total battery capacity was 620 kWh.
- The battery charge and discharge limit was 20 percent of the total capacity.
- The maximum grid energy for each time slot was 200 kWh.
- The initial battery state of charge (SoC) was 124 kWh, which was a discharge limit.
5.3. Simulation Results
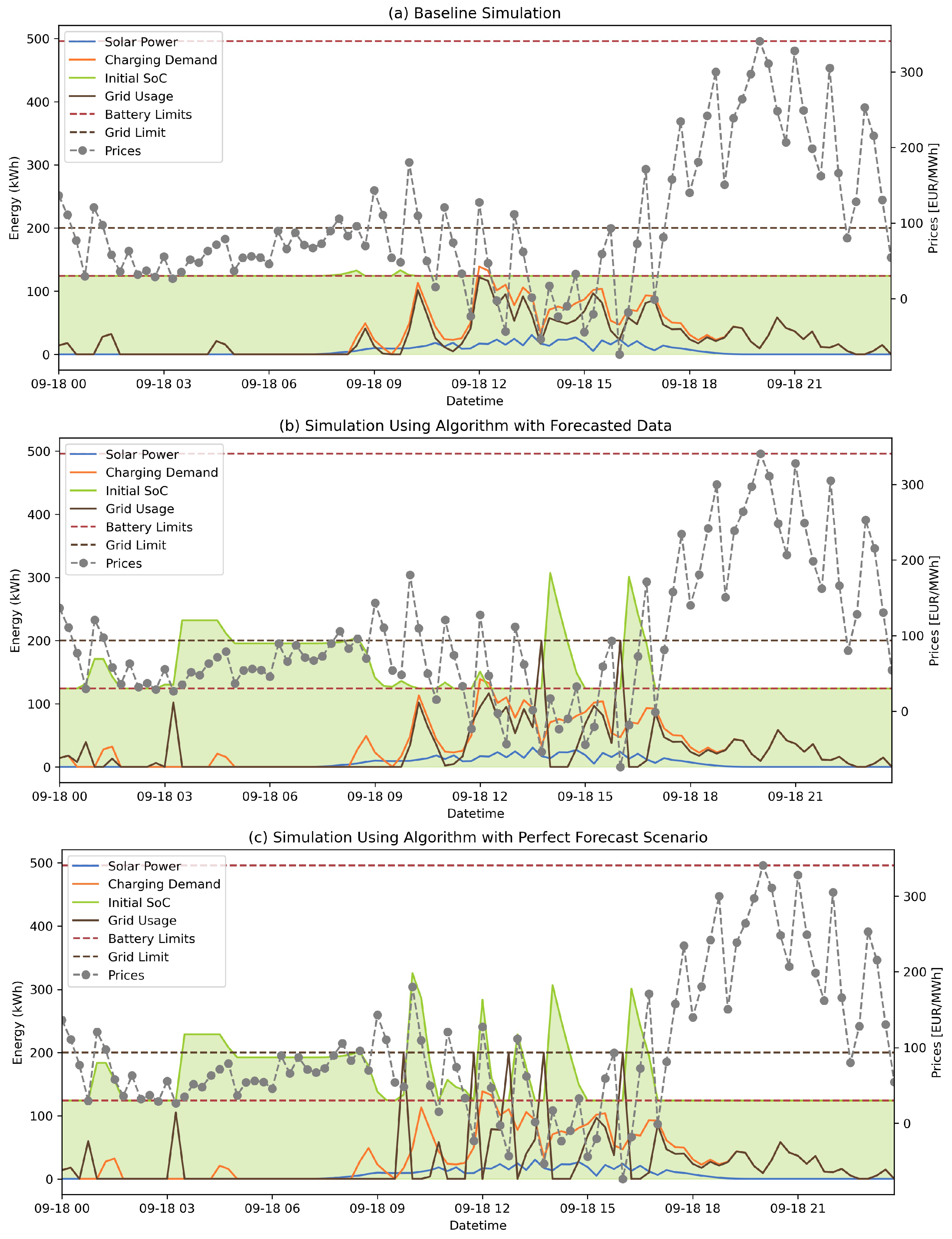
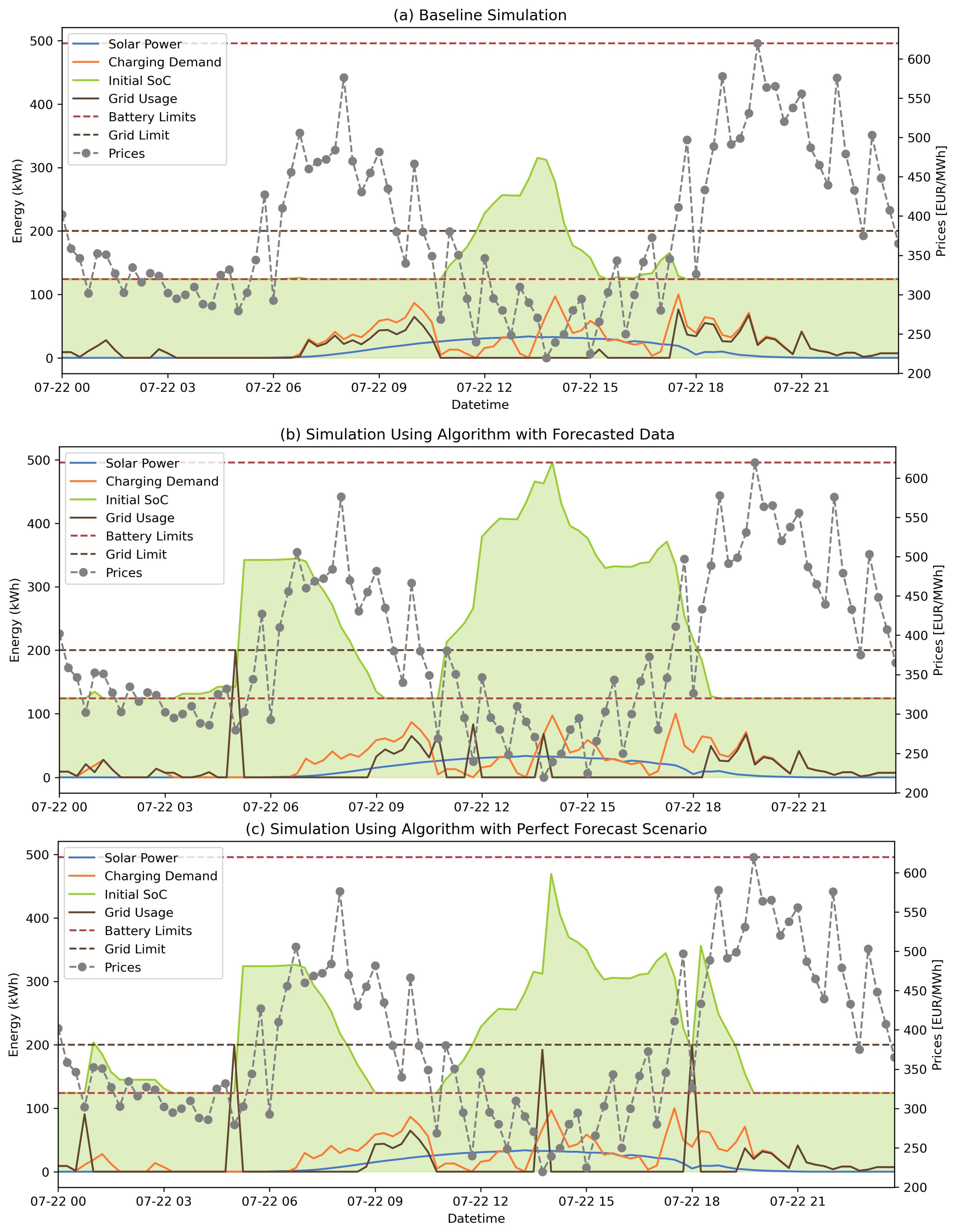
- Baseline simulation or energy balancing simulation: in this case, the simulation ran without predicted data.
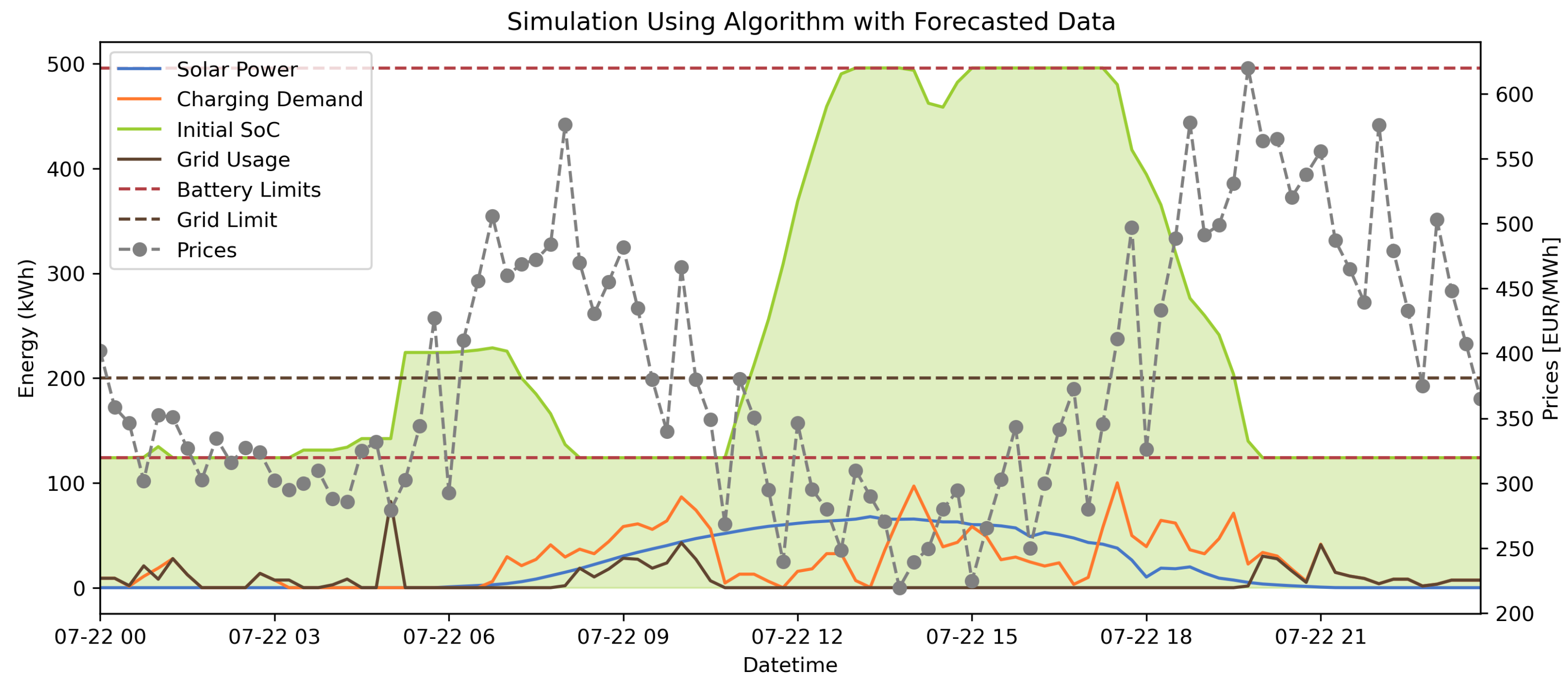
- Simulation with forecasted data: this case corresponded to our proposal.
- Simulation with perfect forecasted data: instead of using predicted data as inputs for the scheduling algorithm, real data were adopted.
5.3.1. Scenario 1: High-Load Demand
5.3.2. Scenario 2: High-PV-Power Production
5.3.3. Scenario 3: Intensified High PV Power
5.3.4. Scenario 4: Monthly Analysis
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| BiLSTM | Bidirectional long short-term memory |
| EDLSTM | Encoder–decoder long short-term memory |
| EV | Electric vehicles |
| GRU | Gated recurrent unit |
| HESS | Hybrid energy storage systems |
| LSTM | Long short-term memory |
| MAE | Mean absolute error |
| MIMO | Multi-input multioutput |
| MSE | Mean squared error |
| NN | Neural network |
| PV | Photovoltaic |
| RNN | Recurrent neural network |
| RMSE | Root-mean-square error |
| SoC | State of charge |
| SCR | Self-consumption rate |
References
- Omondi, B. The Most Polluting Industries in 2022. 2022. Available online: https://ecojungle.net/post/the-most-polluting-industries-in-2021/ (accessed on 4 June 2023).
- Omondi, B. Greenhouse Gas Emissions from Transport in Europe. 2022. Available online: https://www.eea.europa.eu/ims/greenhouse-gas-emissions-from-transport (accessed on 4 June 2023).
- Kabir, M.E.; Assi, C.; Tushar, M.H.K.; Yan, J. Optimal scheduling of EV charging at a solar power-based charging station. IEEE Syst. J. 2020, 14, 4221–4231. [Google Scholar] [CrossRef]
- Cazzola, P.; Gorner, M.; Schuitmaker, R.; Maroney, E. Global EV Outlook 2016; International Energy Agency: Paris, France, 2016. [Google Scholar]
- Commission, European Causes of Climate Change. Available online: https://climate.ec.europa.eu/climate-change/causes-climate-change_en (accessed on 8 June 2023).
- Limouniac, T.; Yaagoubib, R.; Bouzianec, K.; Guissia, K.; Baalia, E.H. Univariate and multivariate LSTM models for one step and multistep PV power forecasting. Int. J. Renew. Energy Dev. 2022, 11, 815. [Google Scholar] [CrossRef]
- Yang, T.; Li, X.; Qi, L.; Hui, D.; Jia, X. A schedule method of battery energy storage system (BESS) to track day-ahead photovoltaic output power schedule based on short-term photovoltaic power prediction. In Proceedings of the International Conference on Renewable Power Generation (RPG 2015), Beijing, China, 17–18 October 2015. [Google Scholar]
- Suresh, V.; Janik, P.; Rezmer, J.; Leonowicz, Z. Forecasting solar PV output using convolutional neural networks with a sliding window algorithm. Energies 2020, 13, 723. [Google Scholar] [CrossRef]
- Chaudhary, G.; Lamb, J.J.; Burheim, O.S.; Austbø, B. Review of energy storage and energy management system control strategies in microgrids. Energies 2021, 14, 4929. [Google Scholar] [CrossRef]
- Atawi, I.E.; Al-Shetwi, A.Q.; Magableh, A.M.; Albalawi, O.H. Recent Advances in Hybrid Energy Storage System Integrated Renewable Power Generation: Configuration, Control, Applications, and Future Directions. Batteries 2022, 9, 29. [Google Scholar] [CrossRef]
- Sharma, E. Energy forecasting based on predictive data mining techniques in smart energy grids. Energy Inform. 2018, 1, 367–373. [Google Scholar] [CrossRef]
- Shirinda, K.; Kanzumba, K. A review of hybrid energy storage systems in renewable energy applications. Int. J. Smart Grid Clean Energy 2022, 11, 99–108. [Google Scholar] [CrossRef]
- Schubert, C.; Hassen, W.F.; Poisl, B.; Seitz, S.; Schubert, J.; Usabiaga, E.O.; Gaudo, P.M.; Pettinger, K.H. Hybrid Energy Storage Systems Based on Redox-Flow Batteries: Recent Developments, Challenges, and Future Perspectives. Batteries 2023, 9, 211. [Google Scholar] [CrossRef]
- Titus, F.; Thanikanti, S.B.; Deb, S.; Kumar, N.M. Charge scheduling optimization of plug-in electric vehicle in a PV powered grid-connected charging station based on day-ahead solar energy forecasting in Australia. Sustainability 2022, 14, 3498. [Google Scholar]
- Corchero, C.; Cruz-Zambrano, M.; Heredia, F.J. Optimal energy management for a residential microgrid including a vehicle-to-grid system. IEEE Trans. Smart Grid 2014, 5, 2163–2172. [Google Scholar]
- Wu, H.; Li, H.; Gu, X. Optimal energy management for microgrids considering uncertainties in renewable energy generation and load demand. Processes 2020, 8, 1086. [Google Scholar] [CrossRef]
- Lee, S.J.; Yoon, Y. Electricity cost optimization in energy storage systems by combining a genetic algorithm with dynamic programming. Mathematics 2020, 8, 1526. [Google Scholar] [CrossRef]
- Hossain, M.A.; Pota, H.R.; Squartini, S.; Abdou, A.F. Modified PSO algorithm for real-time energy management in grid-connected microgrids. Renew. Energy 2019, 136, 746–757. [Google Scholar] [CrossRef]
- Konstantinou, M.; Peratikou, S.; Charalambides, A.G. Solar photovoltaic forecasting of power output using lstm networks. Atmosphere 2021, 12, 124. [Google Scholar] [CrossRef]
- Van Kriekinge, G.; De Cauwer, C.; Sapountzoglou, N.; Coosemans, T.; Messagie, M. Day-ahead forecast of electric vehicle charging demand with deep neural networks. World Electr. Veh. J. 2021, 12, 178. [Google Scholar] [CrossRef]
- Cadete, E.; Ding, C.; Xie, M.; Ahmed, S.; Jin, Y.F. Prediction of electric vehicles charging load using long short-term memory model. In Tran-SET 2021; American Society of Civil Engineers: Reston, VA, USA, 2021; pp. 52–58. [Google Scholar]
- Boulakhbar, M.; Farag, M.; Benabdelaziz, K.; Kousksou, T.; Zazi, M. A deep learning approach for prediction of electrical vehicle charging stations power demand in regulated electricity markets: The case of Morocco. Clean. Energy Syst. 2022, 3, 100039. [Google Scholar] [CrossRef]
- Cespedes, A.J.J.; Pangestu, B.H.B.; Hanazawa, A.; Cho, M. Performance Evaluation of Machine Learning Methods for Anomaly Detection in CubeSat Solar Panels. Appl. Sci. 2022, 12, 8634. [Google Scholar] [CrossRef]
- Lim, S.C.; Huh, J.H.; Hong, S.H.; Park, C.Y.; Kim, J.C. Solar Power Forecasting Using CNN-LSTM Hybrid Model. Energies 2022, 15, 8233. [Google Scholar] [CrossRef]
- Das, U.K.; Tey, K.S.; Seyedmahmoudian, M.; Mekhilef, S.; Idris, M.Y.I.; Van Deventer, W.; Horan, B.; Stojcevski, A. Forecasting of photovoltaic power generation and model optimization: A review. Renew. Sustain. Energy Rev. 2018, 81, 912–928. [Google Scholar] [CrossRef]
- Akhter, M.N.; Mekhilef, S.; Mokhlis, H.; Almohaimeed, Z.M.; Muhammad, M.A.; Khairuddin, A.S.M.; Akram, R.; Hussain, M.M. An hour-ahead PV power forecasting method based on an RNN-LSTM model for three different PV plants. Energies 2022, 15, 2243. [Google Scholar] [CrossRef]
- Gasparin, A.; Lukovic, S.; Alippi, C. Deep learning for time series forecasting: The electric load case. CAAI Trans. Intell. Technol. 2022, 7, 1–25. [Google Scholar] [CrossRef]
- Time Series Forecasting. 2022. Available online: https://www.tensorflow.org/tutorials/structured_data/time_series#normalize_the_data (accessed on 15 December 2022).
- Alfian, G.; Syafrudin, M.; Anshari, M.; Benes, F.; Atmaji, F.T.D.; Fahrurrozi, I.; Hidayatullah, A.F.; Rhee, J. Blood glucose prediction model for type 1 diabetes based on artificial neural network with time-domain features. Biocybern. Biomed. Eng. 2020, 40, 1586–1599. [Google Scholar] [CrossRef]
- Jacoby, D.; Ostrometzky, J.; Messer, H. Short-term prediction of the attenuation in a commercial microwave link using LSTM-based RNN. In Proceedings of the 2020 28th European Signal Processing Conference (EUSIPCO), Amsterdam, The Netherlands, 18–21 January 2021; pp. 1628–1632. [Google Scholar]
- Bontempi, G.; Ben Taieb, S.; Le Borgne, Y.A. Machine learning strategies for time series forecasting. In Business Intelligence: Second European Summer School, Proceedings of eBISS 2012, Brussels, Belgium, 15–21 July 2012, Tutorial Lectures 2; Springer: Berlin/Heidelberg, Germany, 2013; pp. 62–77. [Google Scholar]
- Sharadga, H.; Hajimirza, S.; Balog, R.S. Time series forecasting of solar power generation for large-scale photovoltaic plants. Renew. Energy 2020, 150, 797–807. [Google Scholar] [CrossRef]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning representations by back-propagating errors. Nature 1986, 323, 533–536. [Google Scholar] [CrossRef]
- Lipton, Z.C.; Berkowitz, J.; Elkan, C. A critical review of recurrent neural networks for sequence learning. arXiv 2015, arXiv:1506.00019. [Google Scholar]
- Bengio, Y.; Simard, P.; Frasconi, P. Learning long-term dependencies with gradient descent is difficult. IEEE Trans. Neural Networks 1994, 5, 157–166. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Cho, K.; Van Merriënboer, B.; Bahdanau, D.; Bengio, Y. On the properties of neural machine translation: Encoder-decoder approaches. arXiv 2014, arXiv:1409.1259. [Google Scholar]
- Chollet, F. Chapter 14 Conclusions. In Deep Learning with Python; Manning: New York, NY, USA, 2021. [Google Scholar]
- Pi, M.; Jin, N.; Chen, D.; Lou, B. Short-term solar irradiance prediction based on multichannel LSTM neural networks using edge-based IoT system. Wirel. Commun. Mob. Comput. 2022, 2022, 2372748. [Google Scholar] [CrossRef]
- Cheng, X.; Tang, H.; Wu, Z.; Liang, D.; Xie, Y. BILSTM-Based Deep Neural Network for Rock-Mass Classification Prediction Using Depth-Sequence MWD Data: A Case Study of a Tunnel in Yunnan, China. Appl. Sci. 2023, 13, 6050. [Google Scholar] [CrossRef]
- Sutskever, I.; Vinyals, O.; Le, Q.V. Sequence to sequence learning with neural networks. arXiv 2014, arXiv:1409.3215. [Google Scholar]
- Yongsheng, D.; Fengshun, J.; Jie, Z.; Zhikeng, L. A short-term power output forecasting model based on correlation analysis and ELM-LSTM for distributed PV system. J. Electr. Comput. Eng. 2020, 2020, 2051232. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, Y.; Yang, M.; Zhang, T.; Young, A.A.; Li, X. Comparative study of four time series methods in forecasting typhoid fever incidence in China. PLoS ONE 2013, 8, e63116. [Google Scholar] [CrossRef] [PubMed]
- Westerveld, J.J.; van den Homberg, M.J.; Nobre, G.G.; van den Berg, D.L.; Teklesadik, A.D.; Stuit, S.M. Forecasting transitions in the state of food security with machine learning using transferable features. Sci. Total Environ. 2021, 786, 147366. [Google Scholar] [CrossRef]
- Fuadah, Y.N.; Pramudito, M.A.; Lim, K.M. An Optimal Approach for Heart Sound Classification Using Grid Search in Hyperparameter Optimization of Machine Learning. Bioengineering 2022, 10, 45. [Google Scholar] [CrossRef]
- Panigrahi, A.; Patra, M.R. Network intrusion detection model based on fuzzy-rough classifiers. In Handbook of Neural Computation; Elsevier: Amsterdam, The Netherlands, 2017; pp. 109–125. [Google Scholar]
- Shojaei, A.; Flood, I. Univariate modeling of the timings and costs of unknown future project streams: A case study. Int. J. Adv. Sys. Meas. 2018, 11, 36–46. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Cerqueira, V.; Torgo, L.; Smailović, J.; Mozetič, I. A comparative study of performance estimation methods for time series forecasting. In Proceedings of the 2017 IEEE International Conference on Data Science and Advanced Analytics (DSAA), Tokyo, Japan, 19–21 October 2017; pp. 529–538. [Google Scholar]
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A simple way to prevent neural networks from overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Kuo, W.C.; Chen, C.H.; Hua, S.H.; Wang, C.C. Assessment of Different Deep Learning Methods of Power Generation Forecasting for Solar PV System. Appl. Sci. 2022, 12, 7529. [Google Scholar] [CrossRef]
- Lee, W.; Kim, K.; Park, J.; Kim, J.; Kim, Y. Forecasting solar power using long-short term memory and convolutional neural networks. IEEE Access 2018, 6, 73068–73080. [Google Scholar] [CrossRef]
- Dairi, A.; Harrou, F.; Sun, Y.; Khadraoui, S. Short-term forecasting of photovoltaic solar power production using variational auto-encoder driven deep learning approach. Appl. Sci. 2020, 10, 8400. [Google Scholar] [CrossRef]
- Zhang, J.; Verschae, R.; Nobuhara, S.; Lalonde, J.F. Deep photovoltaic nowcasting. Sol. Energy 2018, 176, 267–276. [Google Scholar] [CrossRef]
- Gensler, A.; Henze, J.; Sick, B.; Raabe, N. Deep Learning for solar power forecasting—An approach using AutoEncoder and LSTM Neural Networks. In Proceedings of the 2016 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Budapest, Hungary, 9–12 October 2016; pp. 2858–2865. [Google Scholar]
- Gao, M.; Li, J.; Hong, F.; Long, D. Short-term forecasting of power production in a large-scale photovoltaic plant based on LSTM. Appl. Sci. 2019, 9, 3192. [Google Scholar] [CrossRef]
- Lee, D.; Kim, K. Recurrent neural network-based hourly prediction of photovoltaic power output using meteorological information. Energies 2019, 12, 215. [Google Scholar] [CrossRef]
- Gao, M.; Li, J.; Hong, F.; Long, D. Day-ahead power forecasting in a large-scale photovoltaic plant based on weather classification using LSTM. Energy 2019, 187, 115838. [Google Scholar] [CrossRef]
- Harrou, F.; Kadri, F.; Sun, Y. Forecasting of photovoltaic solar power production using LSTM approach. In Advanced Statistical Modeling, Forecasting, and Fault Detection in Renewable Energy Systems; IntechOpen: London, UK, 2020; Volume 3. [Google Scholar] [CrossRef]
- Bouktif, S.; Fiaz, A.; Ouni, A.; Serhani, M.A. Optimal deep learning lstm model for electric load forecasting using feature selection and genetic algorithm: Comparison with machine learning approaches. Energies 2018, 11, 1636. [Google Scholar] [CrossRef]
- Peixeiro, M. Time Series Forecasting in Python; Manning Publications: New York, NY, USA, 2022. [Google Scholar]
- Ziyin, L.; Hartwig, T.; Ueda, M. Neural networks fail to learn periodic functions and how to fix it. Adv. Neural Inf. Process. Syst. 2020, 33, 1583–1594. [Google Scholar]
- Skomski, E.; Lee, J.Y.; Kim, W.; Chandan, V.; Katipamula, S.; Hutchinson, B. Sequence-to-sequence neural networks for short-term electrical load forecasting in commercial office buildings. Energy Build. 2020, 226, 110350. [Google Scholar] [CrossRef]
- Bishop, C.M.; Nasrabadi, N.M. Pattern Recognition and Machine Learning; Springer: Berlin/Heidelberg, Germany, 2006; Volume 4. [Google Scholar]
- Abji, N.; Tizghadam, A.; Leon-Garcia, A. Energy storage management in core networks with renewable energy in time-of-use pricing environments. In Proceedings of the 2015 IEEE International Conference on Communications (ICC), London, UK, 8–12 June 2015; pp. 135–141. [Google Scholar]
- Abdin, Z.; Khalilpour, K.R. Single and polystorage technologies for renewable-based hybrid energy systems. In Polygeneration with Polystorage for Chemical and Energy Hubs; Elsevier: Amsterdam, The Netherlands, 2019; pp. 77–131. [Google Scholar]
- Kong, J.; Jufri, F.H.; Kang, B.O.; Jung, J. Development of ESS scheduling algorithm to maximize the potential profitability of PV generation supplier in South Korea. J. Electr. Eng. Technol. 2018, 13, 2227–2235. [Google Scholar]
- Entsoe. ENTSO-E Transparency BZN|DE-LU. Available online: https://transparency.entsoe.eu/transmission-domain/r2/dayAheadPrices/show?name=&defaultValue=false&viewType=GRAPH&areaType=BZN&atch=false&dateTime.dateTime=06.06.2023+00:00|CET|DAY&biddingZone.values=CTY|10Y1001A1001A83F!BZN|10Y1001A1001A82H&resolution.values=PT15M&resolution.values=PT30M&resolution.values=PT60M&dateTime.timezone=CET_CEST&dateTime.timezone_input=CET+(UTC+1)+/+CEST+(UTC+2) (accessed on 6 May 2023).
- Zhao, Y.; Qin, X.; Shi, X. A Comprehensive Evaluation Model on Optimal Operational Schedules for Battery Energy Storage System by Maximizing Self-Consumption Strategy and Genetic Algorithm. Sustainability 2022, 14, 8821. [Google Scholar] [CrossRef]
- Iheanetu, K.J. Solar Photovoltaic Power Forecasting: A Review. Sustainability 2022, 14, 17005. [Google Scholar] [CrossRef]
- Ratshilengo, M.; Sigauke, C.; Bere, A. Short-Term Solar Power Forecasting Using Genetic Algorithms: An Application Using South African Data. Appl. Sci. 2021, 11, 4214. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Optimization Technique | Objectives | Constraints | Pros | Cons |
|---|---|---|---|---|---|
| [14] | AI-based optimization | Optimize EV charging in PV-powered stations | Accurate prediction of PV power, charging station capacity | Cost reduction, grid load management | Implementation complexity, limited consideration for grid constraints, and user behavior assumptions. |
| [15] | Mixed-integer linear programming (MILP) | Efficiently manage energy resources, and cost minimization | Charging and discharging power limits, battery SOC constraints | Cost optimization, realistic representation | High computational resources |
| [16] | Ant colony optimization (ACO) | Optimizing RES usage and electricity purchasing | Battery SoC limits | Low purchasing cost | N/A |
| [17] | Genetic algorithms (GA) and dynamic programming (DP) | Optimize the charge/discharge schedules of ESSs to minimize electricity expenses | ESS capacity, charge/discharge limit | Flexibility | Computational complexity, dependency on accurate prediction. |
| [18] | Particle swarm optimization (PSO) | Optimize battery energy control in a grid-connected microgrid to reduce electricity costs | battery SoC limits, charging and discharging rate | Real-time energy management, a dynamic penalty function | The algorithm’s effectiveness depends on the choice of parameters such as population size, inertia weight, and learning factors. |
| Hyperparameters | Values |
|---|---|
| Hidden unit | 20, 32, 40, 64, 128 |
| Batch size | 64, 128, 256 |
| Learning rate | 0.1, 0.001, 0.0001 |
| Layer | 1, 2 |
| Activation function | relu, tanh |
| Forecasting | Model | Epoch | Configuration |
|---|---|---|---|
| Real-time | RNN | 31 | ● Units 20, 20; dense Unit 8, 1; |
| LSTM | 65 | ● Dropout 0.1; | |
| GRU | 49 | ● Learning rate 0.001; | |
| BiLSTM | 74 | ● Batch size = 128 | |
| Day-ahead | RNN | 41 | ● Units 32, 32; |
| LSTM | 21 | ● Dense 8, 1; 20, 1 (EDLSTM); | |
| GRU | 32 | ● Dropout 0.2; | |
| BiLSTM | 23 | ● Learning rate 0.001; | |
| EDLSTM | 33 | ● Batch size = 192 |
| Models | MSE (%) | MAE (%) | RMSE (%) |
|---|---|---|---|
| RNN | 0.34 | 2.47 | 5.88 |
| LSTM | 0.33 | 2.28 | 5.78 |
| GRU | 0.33 | 2.30 | 5.79 |
| BiLSTM | 0.34 | 2.36 | 5.85 |
| Models | MSE (%) | MAE (%) | RMSE (%) |
|---|---|---|---|
| RNN | 1.46 | 6.58 | 12.12 |
| LSTM | 1.38 | 5.94 | 11.78 |
| GRU | 1.39 | 6.22 | 11.81 |
| BiLSTM | 1.71 | 6.58 | 13.08 |
| EDLSTM | 1.37 | 6.06 | 11.71 |
| Feature | Type | Description |
|---|---|---|
| N | Cyclic time of day in 15 min intervals of charging start time. | |
| N | Cyclic time of year of charging start time. | |
| Location | C | The location of the charging session. |
| Charging connector | C | Connector type used in the charging session. |
| Elapsed time | N | The passage of time |
| Load demand | N | Energy consumption (kWh) during charging. |
| Forecasting | Level | Model | Epoch | Configuration |
|---|---|---|---|---|
| Real-time | All locations | RNN | 35 | Unit 30, dropout 0.0 |
| LSTM | 47 | Unit 20, 20; dropout 0.2 | ||
| GRU | 35 | |||
| BiLSTM | 30 | |||
| Highway | RNN | 43 | Unit 20, dropout 0.0 | |
| LSTM | 53 | Unit 20, 20; dropout 0.2 | ||
| GRU | 32 | |||
| BiLSTM | 41 | |||
| Countryside | RNN | 57 | Unit 20, dropout 0.0 | |
| LSTM | 48 | Unit 20, 20; dropout 0.2 | ||
| GRU | 41 | |||
| BiLSTM | 46 | |||
| Inner city | RNN | 66 | Unit 20, dropout 0.0 | |
| LSTM | 55 | Unit 20, 20; dropout 0.2 | ||
| GRU | 38 | |||
| BiLSTM | 51 | |||
| Near the highway | RNN | 63 | Unit 20, dropout 0.0 | |
| LSTM | 50 | Unit 20, 20; dropout 0.2 | ||
| GRU | 35 | |||
| BiLSTM | 36 | |||
| Outside the city | RNN | 60 | Unit 20, dropout 0.0 | |
| LSTM | 37 | Unit 20, 20; dropout 0.2 | ||
| GRU | 50 | |||
| BiLSTM | 45 | |||
| Day-ahead | All locations | RNN | 40 | Unit 40, dropout 0.0 |
| LSTM | 30 | Unit 40, 40; dropout 0.2 | ||
| GRU | 30 | |||
| BiLSTM | 35 | |||
| EDLSTM | 30 | Unit 40, 40; dense 10; dropout 0.2 |
| Level | Models | MSE (%) | MAE (%) | RMSE (%) |
|---|---|---|---|---|
| All locations | RNN | 0.99 | 7.03 | 9.95 |
| LSTM | 0.95 | 6.72 | 9.79 | |
| GRU | 0.95 | 6.70 | 9.70 | |
| BiLSTM | 1.03 | 6.77 | 10.17 | |
| Highway | RNN | 0.77 | 5.29 | 8.81 |
| LSTM | 0.77 | 5.17 | 8.78 | |
| GRU | 0.76 | 5.15 | 8.75 | |
| BiLSTM | 0.78 | 5.17 | 9.81 | |
| Near the highway | RNN | 0.66 | 3.59 | 8.15 |
| LSTM | 0.65 | 3.40 | 8.07 | |
| GRU | 0.61 | 3.47 | 7.83 | |
| BiLSTM | 0.64 | 3.71 | 8.04 | |
| Inner city | RNN | 0.51 | 4.44 | 7.20 |
| LSTM | 0.55 | 4.28 | 7.42 | |
| GRU | 0.51 | 4.40 | 7.18 | |
| BiLSTM | 0.55 | 4.41 | 7.48 | |
| Countryside | RNN | 0.54 | 4.06 | 7.35 |
| LSTM | 0.51 | 3.75 | 7.18 | |
| GRU | 0.51 | 3.89 | 7.19 | |
| BiLSTM | 0.51 | 4.00 | 7.20 | |
| Outside the city | RNN | 0.67 | 3.15 | 8.19 |
| LSTM | 0.66 | 3.19 | 8.15 | |
| GRU | 0.63 | 3.03 | 7.97 | |
| BiLSTM | 0.64 | 3.33 | 8.02 |
| Level | Models | MSE (%) | MAE (%) | RMSE (%) |
|---|---|---|---|---|
| All locations | RNN | 2.06 | 9.65 | 14.38 |
| LSTM | 2.17 | 9.99 | 14.73 | |
| GRU | 1.90 | 9.68 | 13.91 | |
| BiLSTM | 2.00 | 9.81 | 14.14 | |
| Encoder–decoder LSTM | 2.04 | 9.95 | 14.29 |
| Simulation | Total Cost | Number of Grid Uses |
|---|---|---|
| Baseline | 228.42 | 63 |
| Algorithm with forecasted data | 177.21 | 56 |
| Algorithm with perfect forecast | 134.10 | 47 |
| Simulation: | Algorithm with Forecasted Data | ||||||||||
| Time | 00:00 | 00:15 | 00:30 | 00:45 | 02:45 | 3:15 | 10:45 | 11:45 | 12:45 | 13:45 | 16:00 |
| Amount | 8.35 | 6.96 | 7.64 | 39.16 | 6.17 | 101.88 | 35.04 | 67.14 | 82.07 | 200 | 200 |
| Simulation: | Algorithm with Perfect Forecast | ||||||||||
| Time | 00:00 | 00:15 | 00:45 | 3:15 | 09:45 | 10:45 | 11:45 | 12:45 | 13:45 | 16:00 | |
| Amount | 13.86 | 17.82 | 59.80 | 105.05 | 200 | 58.26 | 200 | 200 | 200 | 200 | |
| Simulation: | Algorithm with Forecasted Data | ||||||||||
| Time | 00:00 | 00:15 | 00:30 | 00:45 | 03:15 | 04:00 | 04:15 | 05:00 | 10:45 | 11:45 | 13:45 |
| Amount | 1.85 | 1.75 | 1.99 | 20.84 | 7.30 | 2.75 | 8.21 | 200 | 67.66 | 83.04 | 200 |
| Simulation: | Algorithm with Perfect Forecast | ||||||||||
| Time | 00:00 | 00:15 | 00:30 | 00:45 | 05:00 | 13:45 | 18:00 | ||||
| Amount | 9 | 9 | 1.44 | 90 | 200 | 192 | 200 | ||||
| Simulation | Total Cost | Number of Grid Uses |
|---|---|---|
| Baseline | 582.58 | 52 |
| Algorithm with forecasted data | 502.40 | 45 |
| Algorithm with perfect forecast | 468.82 | 33 |
| Simulation: | Algorithm with Forecasted Data | |||||||||
| Time | 00:00 | 00:15 | 00:30 | 00:45 | 03:15 | 04:00 | 04:15 | 05:00 | 10:45 | 11:45 |
| Amount | 1.75 | 1.72 | 1.98 | 20.84 | 7.30 | 2.75 | 8.21 | 82.20 | 0 | 0 |
| Total Cost | Number of Grid Uses | |
|---|---|---|
| June (21.06.2022–30.06.2022) | ||
| Baseline | 2484.26 | 400 |
| Algorithm with forecasted data | 2165.53 | 303 |
| Algorithm with perfect forecast | 1992.09 | 190 |
| July | ||
| Baseline | 12,263.50 | 1669 |
| Algorithm with forecasted data | 10,877.06 | 1395 |
| Algorithm with perfect forecast | 10,124.34 | 946 |
| August | ||
| Baseline | 16,083.30 | 1641 |
| Algorithm with forecasted data | 14,452.38 | 1243 |
| Algorithm with perfect forecast | 14,093.80 | 977 |
| September | ||
| Baseline | 14,930.79 | 1581 |
| Algorithm with forecasted data | 13,037.64 | 1308 |
| Algorithm with perfect forecast | 12,556.51 | 1009 |
| October | ||
| Baseline | 8381.63 | 1845 |
| Algorithm with forecasted data | 7029.69 | 1435 |
| Algorithm with perfect forecast | 6866.35 | 1236 |
| November (01.11.2022–10.11.2022) | ||
| Baseline | 1867.26 | 542 |
| Algorithm with forecasted data | 1650.11 | 466 |
| Algorithm with perfect forecast | 1637.46 | 413 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Erdogan, G.; Fekih Hassen, W. Charging Scheduling of Hybrid Energy Storage Systems for EV Charging Stations. Energies 2023, 16, 6656. https://doi.org/10.3390/en16186656
Erdogan G, Fekih Hassen W. Charging Scheduling of Hybrid Energy Storage Systems for EV Charging Stations. Energies. 2023; 16(18):6656. https://doi.org/10.3390/en16186656
Chicago/Turabian StyleErdogan, Gülsah, and Wiem Fekih Hassen. 2023. "Charging Scheduling of Hybrid Energy Storage Systems for EV Charging Stations" Energies 16, no. 18: 6656. https://doi.org/10.3390/en16186656
APA StyleErdogan, G., & Fekih Hassen, W. (2023). Charging Scheduling of Hybrid Energy Storage Systems for EV Charging Stations. Energies, 16(18), 6656. https://doi.org/10.3390/en16186656