
Charge Estimation of Piezoelectric Actuators: A Comparative Study





Abstract
1. Introduction
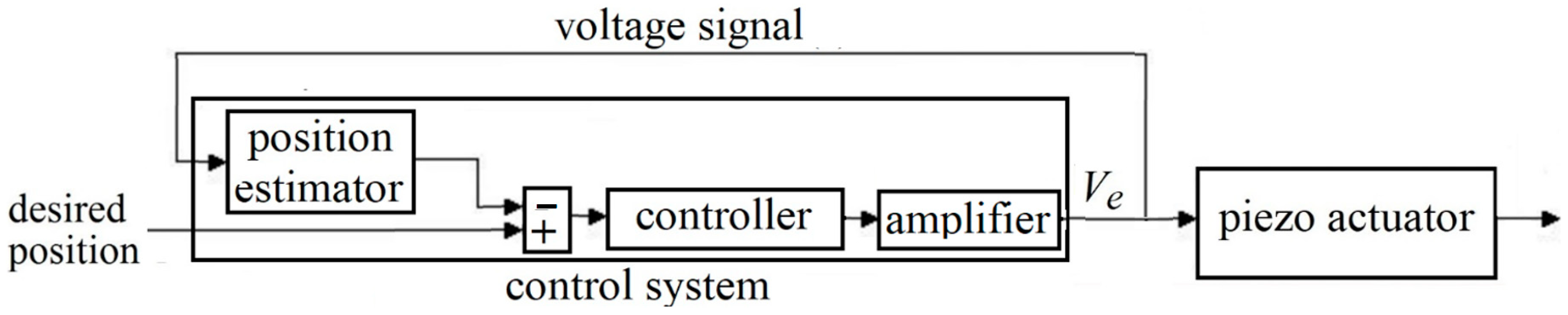
2. Background-Fundamentals of Position Control of Piezoelectric Actuators
3. Different Types of Charge Estimators for Piezoelectric Actuators
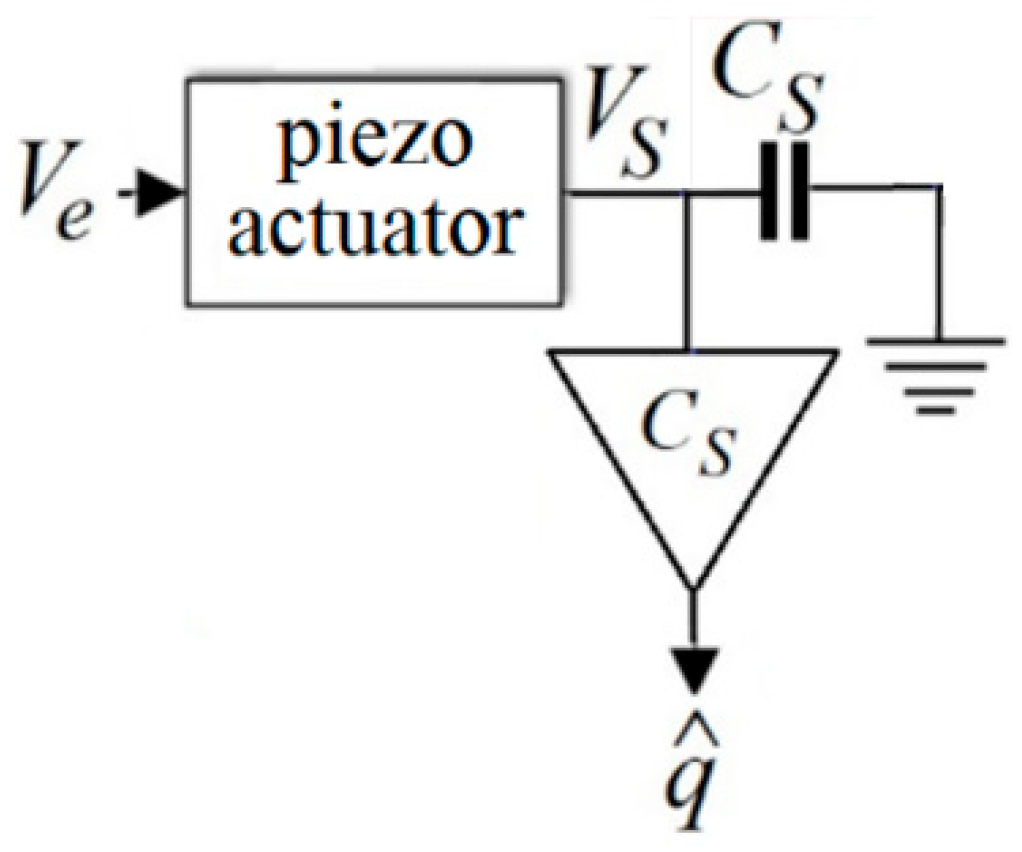
- Type I: Charge estimators with a sensing capacitor
- Type II: Charge estimators with a sensing resistor
3.1. Type I—Charge Estimators with a Sensing Capacitor
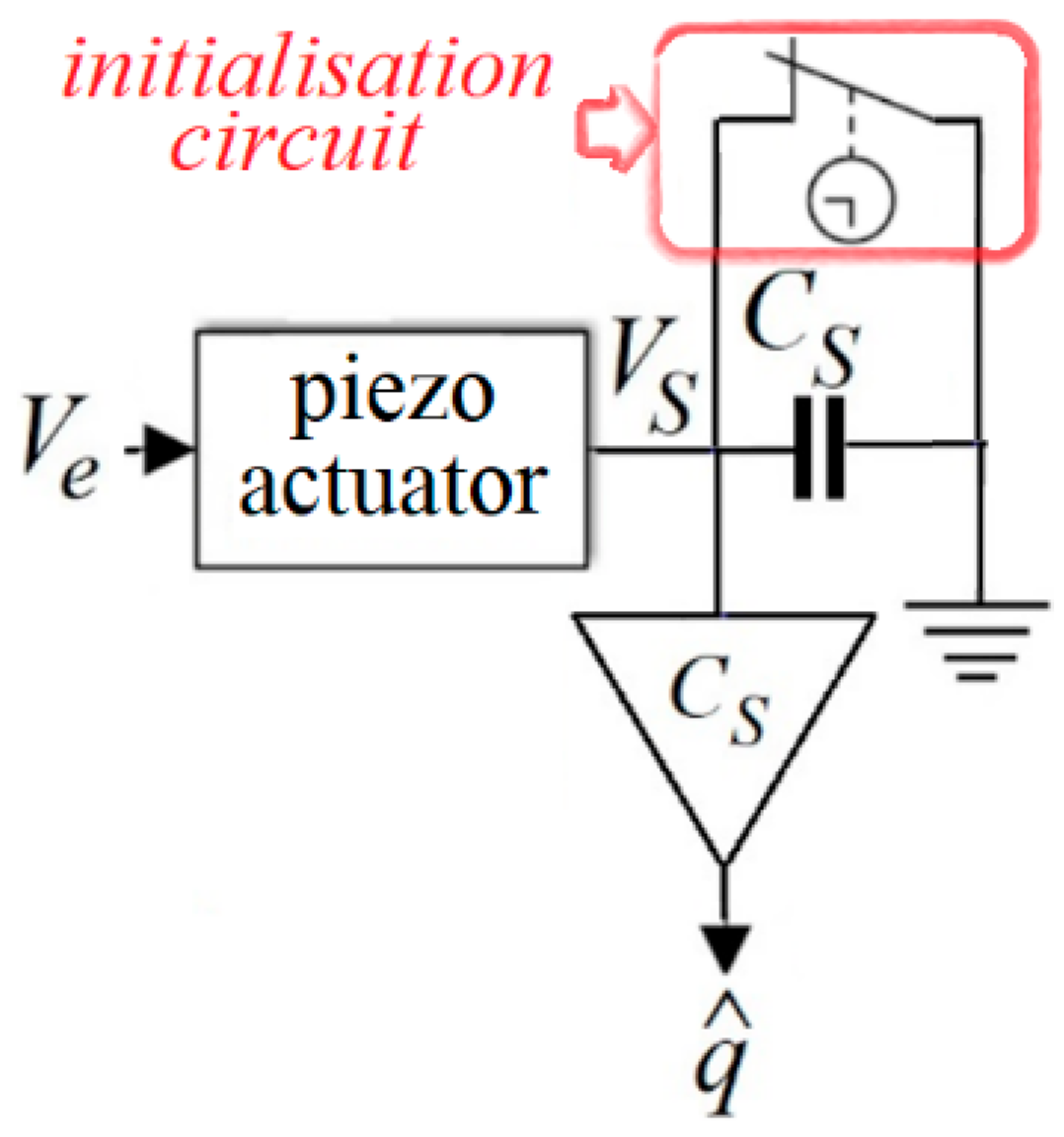
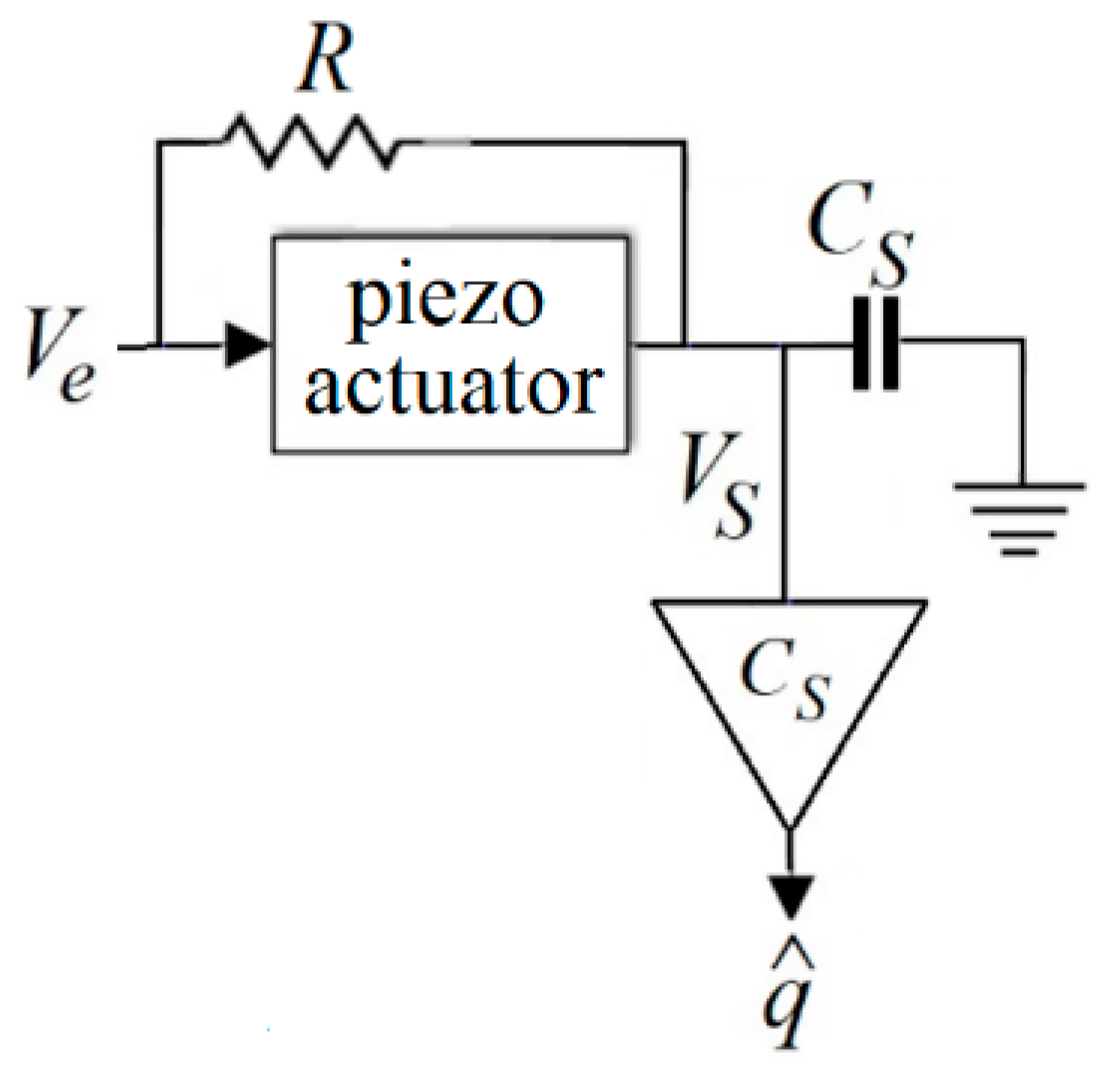
3.1.1. Type IA—Type I with an Initialisation Circuit
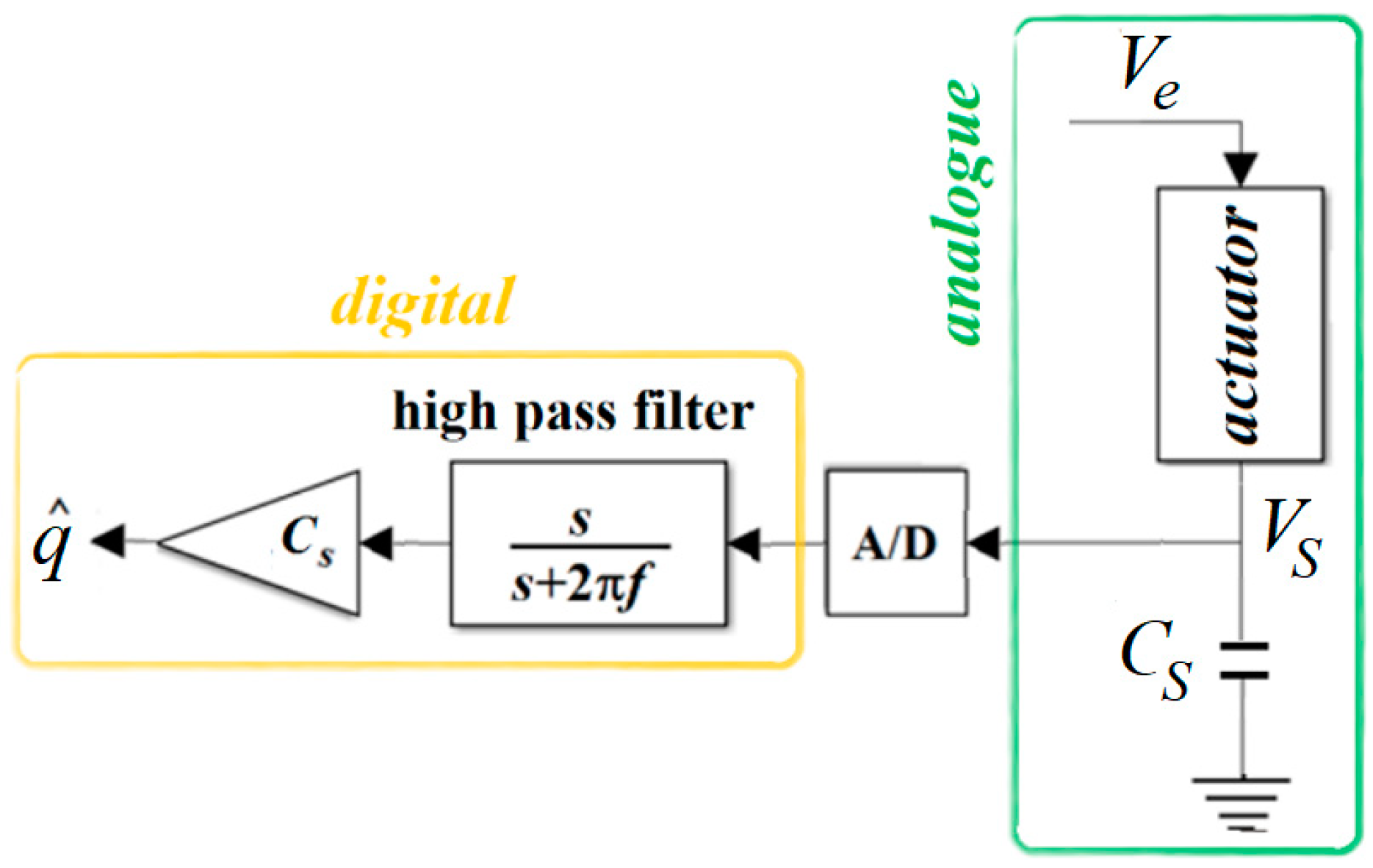
3.1.2. Type IB—Type I with an Analogue High-Pass Filter
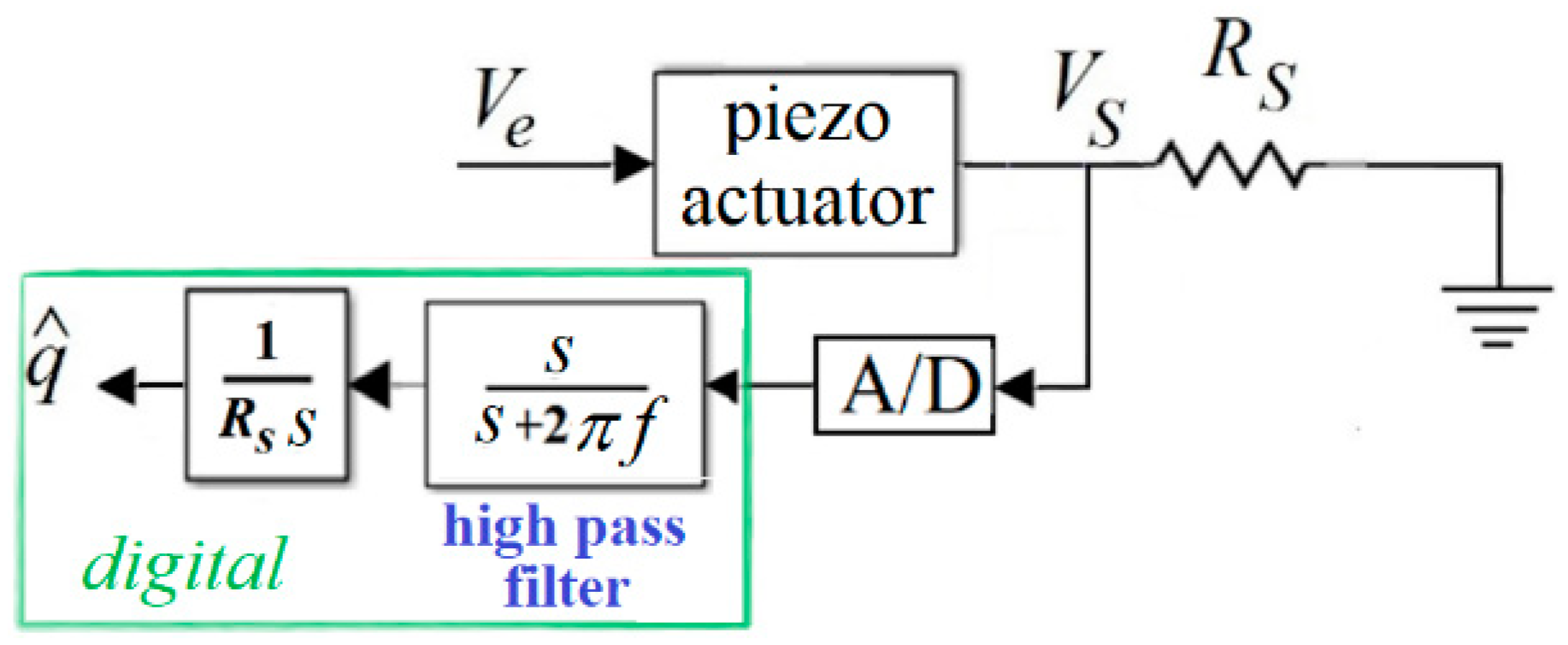
3.2. Type II—Charge Estimators with a Sensing Resistor
4. Problem Statement
- The high-pass filter distorts low-frequency charge signals.
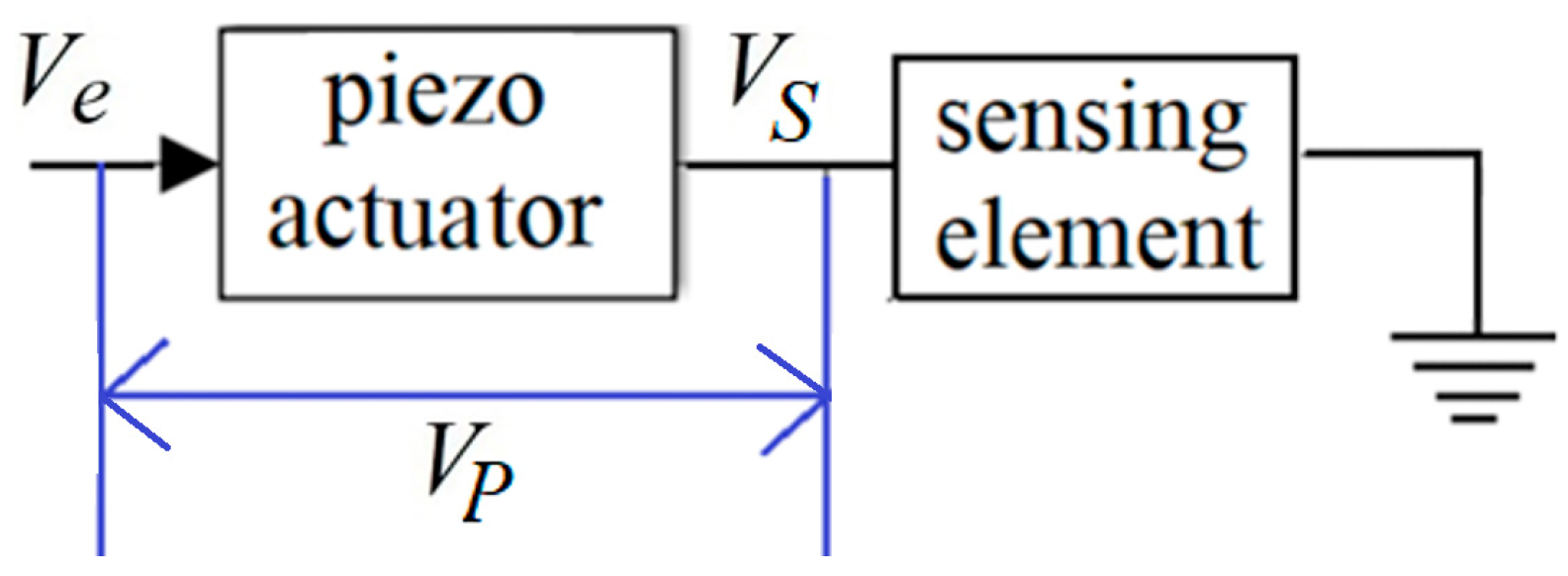
- The voltage across the sensing element, known as voltage drop, is not exerted on the actuator and is practically wasted.
5. Analytical Investigation
5.1. Analytical Formulation for Type I Charge Estimators
5.2. Analytical Formulation for Type II Charge Estimators
5.3. Results of Approximate Analytical Investigation
- Theoretically, (23)/(26) can calculate the sensing capacitance/resistance leading to a sinusoidal voltage drop with an amplitude of AS with a type I/II charge estimator, respectively, where Ae is the amplitude of the sinusoidal excitation voltage.
- Based on (23) and (26), the sensing capacitance/resistance of type I/II estimators is dependent on/independent of the excitation frequency. This is a merit for type I estimators.
- A fixed component (bias) in excitation voltage leads to a fixed component voltage drop in type I estimators, as per (15) and superposition. Such a component (bias) has no enduring effect on the voltage drop in type II estimators, per (22).
- For an identical voltage drop, according to (24) and (28), type II estimators estimate a larger charge compared with type I ones, assuming Ae ≫ 1. However, considering the values of CS and CP reported in experiments, the difference in estimated charge is insubstantial.
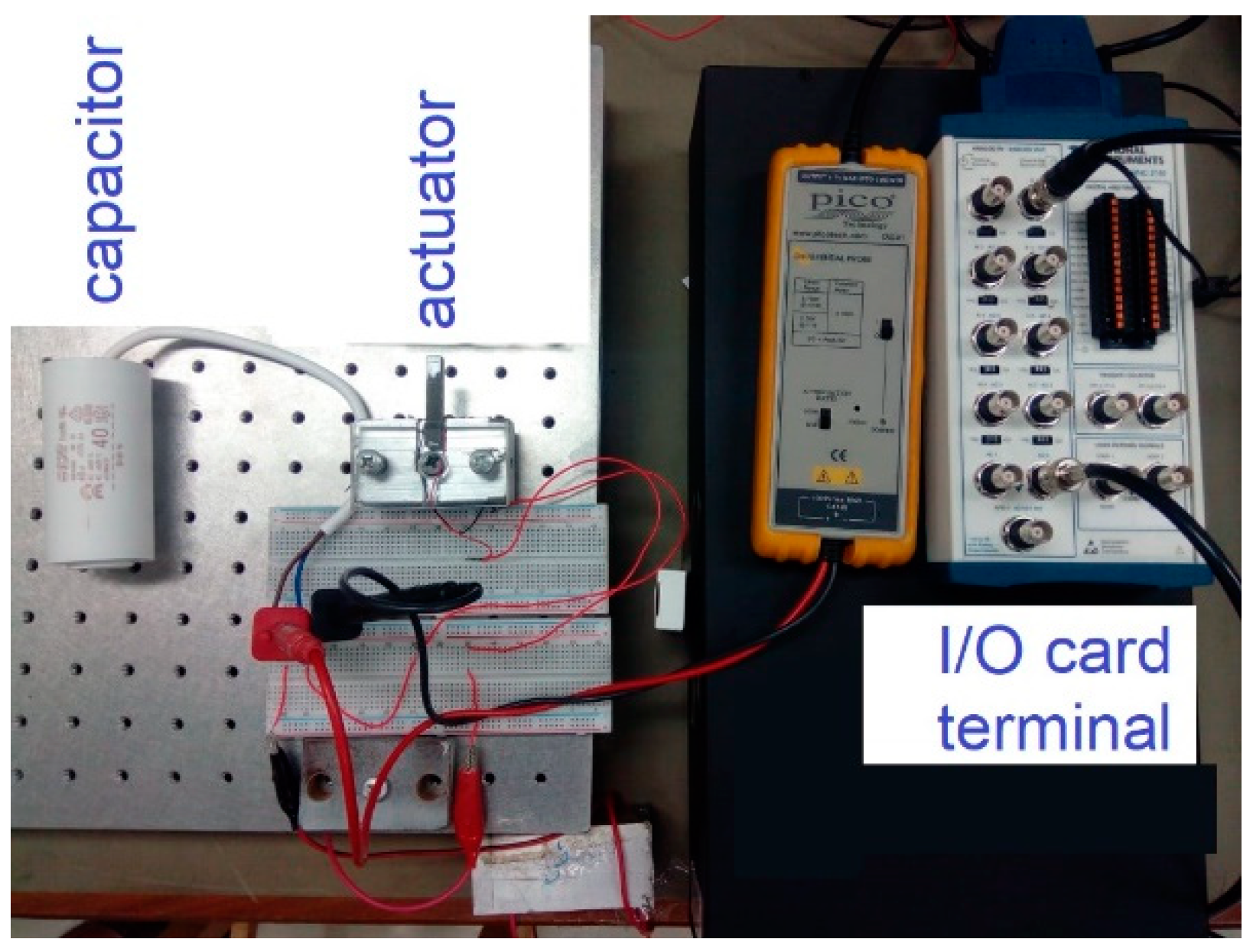
6. Experimentation
7. Experimental Results and Discussion
7.1. Observation 1: Discrepancy between Estimator Types in Frequency Dependency

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ae = 4.21 V, CS = 20 μF qrange-I-analytical = 40 μC, qrange-II-analytical = 52.46 μC | |||||
|---|---|---|---|---|---|
| fe (Hz) | R (Ω) | AS-I (V) | AS-II (V) | qrange-I (μC) | qrange-II (μC) |
| 20 | 303 | 1.10 | 0.99 | 44.14 | 53.07 |
| 30 | 202 | 1.10 | 1.00 | 44.08 | 54.62 |
| 40 | 152 | 1.10 | 1.00 | 44.01 | 54.35 |
| 50 | 121 | 1.10 | 1.02 | 43.88 | 54.19 |
| 60 | 101 | 1.10 | 0.97 | 43.94 | 52.77 |
| 70 | 87 | 1.10 | 0.96 | 43.94 | 53.64 |
| Ae = 7.42 V, CS = 40 μF qrange-I-analytical = 80 μC, qrange-II-analytical = 92.45 μC | |||||
|---|---|---|---|---|---|
| fe (Hz) | R (Ω) | AS-I (V) | AS-II (V) | qrange-I (μC) | qrange-II (μC) |
| 20 | 172 | 1.16 | 1.05 | 92.49 | 99.30 |
| 30 | 115 | 1.16 | 1.04 | 92.49 | 99.88 |
| 40 | 86 | 1.15 | 0.99 | 92.36 | 92.68 |
| 50 | 69 | 1.16 | 0.94 | 92.62 | 88.30 |
| 60 | 57 | 1.15 | 0.92 | 92.36 | 87.25 |
| 70 | 49 | 1.14 | 0.83 | 91.05 | 82.96 |
| Ae = 13.84 V, CS = 80 μF qrange-I-analytical = 160 μC, qrange-II-analytical = 172 μC | |||||
|---|---|---|---|---|---|
| fe (Hz) | R (Ω) | AS-I (V) | AS-II (V) | qrange-I (μC) | qrange-II (μC) |
| 20 | 92 | 1.30 | 1.14 | 207.6 | 204.2 |
| 30 | 62 | 1.29 | 1.07 | 206.3 | 1 97.8 |
| 40 | 46 | 1.29 | 1.00 | 206.0 | 193.0 |
| 50 | 37 | 1.28 | 0.99 | 205.3 | 194.8 |
| 60 | 31 | 1.28 | 0.87 | 204.7 | 177.7 |
| 70 | 26 | 1.28 | 0.81 | 204.5 | 168.8 |
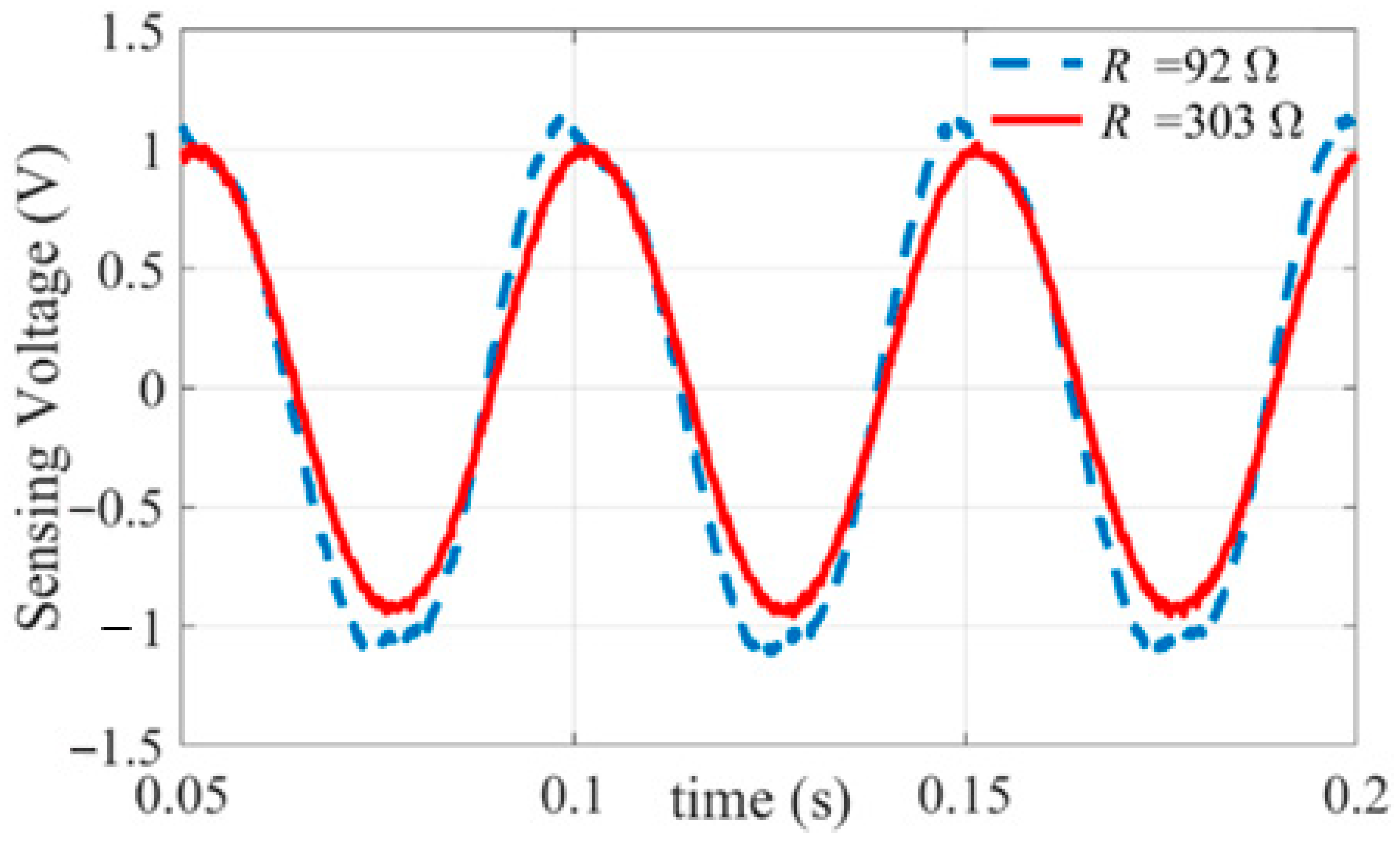
7.2. Observation II: Discrepancy between Theoretically Expected and Experimental Values of AS
7.3. Observation III: Type II Estimators Are Capable of Estimating Slightly Higher Values of Charge
8. Conclusions
- C1.
- Type II estimators have a slightly higher ratio of estimated charge to voltage drop, 12% to 40%, according to experiments.
- C2.
- Both behaviour and the choice of the sensing element are independent of/dependent on frequency in type I/II estimators, as a major advantage of type I estimators.
- C3.
- Bias (a time-independent component) in the excitation voltage has an/no enduring effect on the behaviour of type I/II estimators.
- C4.
- In type I estimators, in order to obtain low voltage drops, high-capacitance sensing capacitors need to be employed. These capacitors are bulkier than the resistors used in type II estimators. Such a capacitor is shown in Figure 10.
- C5.
- Type I estimators can be implemented as an analogue circuit, e.g., Figure 7; while type II estimators need digital processors to be implemented.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sabek, W.; Al-mana, A.; Siddiqui, A.R.; Assadi, B.E.; Mohammad-khorasani, M.; Mohammadzaheri, M.; Tafreshi, R. Experimental Investigation of Piezoelectric Tube Actuators Dynamics. In Proceedings of the 2nd International Conference on Robotics and Mechatronics, Madrid, Spain, 20–21 July 2015. [Google Scholar]
- Hoshyarmanesh, H.; Ghodsi, M.; Kim, M.; Cho, H.H.; Park, H.-H. Temperature Effects on Electromechanical Response of Deposited Piezoelectric Sensors Used in Structural Health Monitoring of Aerospace Structures. Sensors 2019, 19, 2805. [Google Scholar] [CrossRef] [PubMed]
- Hoshyarmanesh, H.; Ghodsi, M.; Park, H.-H. Electrical Properties of Uv-Irradiated Thick Film Piezo-Sensors on Superalloy In718 Using Photochemical Metal Organic Deposition. Thin Solid Film. 2016, 616, 673–679. [Google Scholar] [CrossRef]
- Hoshyarmanesh, H.; Nehzat, N.; Salehi, M.; Ghodsi, M.; Lee, H.-S.; Park, H.-H. Piezoelectric Transducers on Curved Dispersive Bending Wave and Poke-Charged Touch Screens. Mater. Manuf. Process. 2014, 29, 870–876. [Google Scholar] [CrossRef]
- Chopra, I. Review of State of Art of Smart Structures and Integrated Systems. Aiaa J. 2002, 40, 2145–2187. [Google Scholar] [CrossRef]
- Rios, S.; Fleming, A. Control of Piezoelectric Benders Using a Charge Drive. In Proceedings of the 14th International Conference on New Actuators, Beremen, Germany, 23–25 June 2014. [Google Scholar]
- Delibas, B.; Koc, B.; Thielager, J.; Stiebel, C. A Novel Drive and Control Method for Piezoelectric Motors in Microscopy Stages. In Proceedings of the Euspen’s 21st International Conference & Exhibition, Copenhagen, Denmark, 7–10 June 2021. [Google Scholar]
- Hou, W.; Zheng, Y.; Guo, W.; Pengcheng, G. Piezoelectric Vibration Energy Harvesting for Rail Transit Bridge with Steel-Spring Floating Slab Track System. J. Clean. Prod. 2021, 291, 125283. [Google Scholar] [CrossRef]
- Sharma, K.; Srinivas, G. Flying Smart: Smart Materials Used in Aviation Industry. J. Mater. Today Proc. 2020, 27, 244–250. [Google Scholar] [CrossRef]
- Li, H.; Liu, J.; Li, K.; Liu, Y. Piezoelectric Micro-Jet Devices: A Review. Sens. Actuators A Phys. 2019, 297, 111552. [Google Scholar] [CrossRef]
- Singh, K.; Sharma, S.; Kumar, R.; Talha, M. Vibration Control of Cantilever Beam Using Poling Tuned Piezoelectric Actuator. Mech. Based Des. Struct. Mach. 2021, 51, 2217–2240. [Google Scholar] [CrossRef]
- Flores, G.; Rakotondrabe, M. Robust Nonlinear Control for a Piezoelectric Actuator in a Robotic Hand Using Only Position Measurements. IEEE Control Syst. Lett. 2021, 6, 872–877. [Google Scholar] [CrossRef]
- Mohammadzaheri, M.; Soltani, P.; Ghodsi, M. Micro/Nanopositioning Systems with Piezoelectric Actuators and Their Role in Sustainability and Ecosystems. In EcoMechatronics: Challenges for Evolution, Development and Sustainability; Springer: Berlin/Heidelberg, Germany, 2022; pp. 233–250. [Google Scholar]
- Moheimani, S.O.R. Invited Review Article: Accurate and Fast Nanopositioning with Piezoelectric Tube Scanners: Emerging Trends and Future Challenges. Rev. Sci. Instrum. 2008, 79, 071101. [Google Scholar] [CrossRef]
- Mohammadzaheri, M.; AlQallaf, A. Nanopositioning Systems with Piezoelectric Actuators, Current State and Future Perspective. Sci. Adv. Mater. 2017, 9, 1071–1080. [Google Scholar] [CrossRef]
- Hu, C.; Shi, Y.; Liu, F. Research on Precision Blanking Process Design of Micro Gear Based on Piezoelectric Actuator. Micromachines 2021, 12, 200. [Google Scholar] [CrossRef] [PubMed]
- Deng, J.; Liu, S.; Liu, Y.; Wang, L.; Gao, X.; Li, K. A 2-Dof Needle Insertion Device Using Inertial Piezoelectric Actuator. IEEE Trans. Ind. Electron. 2021, 69, 3918–3927. [Google Scholar] [CrossRef]
- Szeremeta, W.K.; Harniman, R.L.; Bermingham, C.R.; Antognozzi, M. Towards a Fully Automated Scanning Probe Microscope for Biomedical Applications. Sensors 2021, 21, 3027. [Google Scholar] [CrossRef]
- Meinhold, W.; Martinez, D.E.; Oshinski, J.; Hu, A.-P.; Ueda, J. A Direct Drive Parallel Plane Piezoelectric Needle Positioning Robot for Mri Guided Intraspinal Injection. IEEE Trans. Biomed. Eng. 2020, 68, 807–814. [Google Scholar] [CrossRef] [PubMed]
- Miri, N.; Mohammadzaheri, M.; Chen, L. An Enhanced Physics-Based Model to Estimate the Displacement of Piezoelectric Actuators. J. Intell. Mater. Syst. Struct. 2015, 26, 1442–1451. [Google Scholar] [CrossRef]
- Yi, K.; Veillette, R. A Charge Controller for Linear Operation of a Piezoelectric Stack Actuator. IEEE Trans. Control Syst. Technol. 2005, 13, 517–526. [Google Scholar] [CrossRef]
- Bazghaleh, M.; Grainger, S.; Mohammadzaheri, M.; Cazzolato, B.; Lu, T.-F. A Novel Digital Charge-Based Displacement Estimator for Sensorless Control of a Grounded-Load Piezoelectric Tube Actuator. Sens. Actuators A Phys. 2013, 198, 91–98. [Google Scholar] [CrossRef]
- Soleymanzadeh, D.; Ghafarirad, H.; Zareinejad, M. Charge-Based Robust Position Estimation for Low Impedance Piezoelectric Actuators. Measurement 2019, 147, 106839. [Google Scholar] [CrossRef]
- Mohammadzaheri, M.; Ziaiefar, H.; Ghodsi, M.; Bahadur, I.; Zarog, M.; Saleem, A.; Emadi, M. Adaptive Charge Estimation of Piezoelectric Actuators, a Radial Basis Function Approach. In Proceedings of the 20th International Conference on Research and Education in Mechatronics, Wels, Austria, 23–24 May 2019. [Google Scholar]
- Mohammadzaheri, M.; AlSulti, S.; Ghodsi, M.; Bahadur, I.; Emadi, M. Assessment of Capacitor-Based Charge Estimators for Piezoelectric Actuators. In Proceedings of the IEEE International Conference on Mechatronics, Kashiwa, Japan, 7–9 March 2021. [Google Scholar]
- Mohammadzaheri, M.; Ziaiefar, H.; Ghodsi, M.; Emadi, M.; Zarog, M.; Soltani, P.; Bahadur, I. Adaptive Charge Estimation of Piezoelectric Actuators with a Variable Sensing Resistor, an Artificial Intelligence Approach. Eng. Lett. 2022, 30, 193–200. [Google Scholar]
- Bazghaleh, M.; Mohammadzaheri, M.; Grainger, S.; Cazzolato, B.; Lu, T.F. A New Hybrid Method for Sensorless Control of Piezoelectric Actuators. Sens. Actuators A Phys. 2013, 194, 25–30. [Google Scholar] [CrossRef]
- Roshandel, N.; Soleymanzadeh, D.; Ghafarirad, H.; Koupaei, A.S. A Modified Sensorless Position Estimation Approach for Piezoelectric Bending Actuators. Mech. Syst. Signal Process. 2021, 149, 107231. [Google Scholar] [CrossRef]
- Mohammadzaheri, M.; Grainger, S.; Kopaei, M.K.; Bazghaleh, M. Imc-Based Feedforward Control of a Piezoelectric Tube Actuator. In Proceedings of the IEEE Eighth International Conference on Intelligent Sensors, Sensor Networks and Information Processing, Melbourne, VIC, Australia, 2–5 April 2013. [Google Scholar]
- Miri, N.; Mohammadzaheri, M.; Chen, L. A Comparative Study of Different Physics-Based Approaches to Modelling of Piezoelectric Actuators. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Wollongong, NSW, Australia, 9–12 July 2013. [Google Scholar]
- Mohammadzaheri, M.; Ziaeifar, H.; Bahadur, I.; Zarog, M.; Emadi, M.; Ghodsi, M. Data-Driven Modelling of Engineering Systems with Small Data, a Comparative Study of Artificial Intelligence Techniques. In Proceedings of the 5th Iranian Conference on Signal Processing and Intelligent Systems (ICSPIS), Semnan, Iran, 18–19 December 2019. [Google Scholar]
- Ahmadpour, H.; Mohammadzaheri, M.; Emadi, M.; Ghods, V.; Mehrabi, D.; Tafreshi, R. Neural Modelling of a Piezoelectric Actuator Inspired by the Presiach Approach. In Proceedings of the International Conference on Artificial Intelligence, Energy and Manufacturing Engineering, Dubai, United Arab Emirates, 7–8 January 2015. [Google Scholar]
- Mohammadzaheri, M.; Grainger, S.; Bazghaleh, M. A System Identification Approach to the Characterization and Control of a Piezoelectric Tube Actuator. Smart Mater. Struct. 2013, 22, 105022. [Google Scholar] [CrossRef]
- Mohammadzaheri, M.; Grainger, S.; Bazghaleh, M. A Comparative Study on the Use of Black Box Modelling for Piezoelectric Actuators. Int. J. Adv. Manuf. Technol. 2012, 63, 1247–1255. [Google Scholar] [CrossRef]
- Mohammadzaheri, M.; Grainger, S.; Bazghaleh, M. Fuzzy Modeling of a Piezoelectric Actuator. Int. J. Precission Eng. Manuf. 2012, 13, 663–670. [Google Scholar] [CrossRef]
- Qin, Y.; Tian, Y.; Zhang, D.; Shirinzadeh, B.; Fatikow, S. A Novel Direct Inverse Modeling Approach for Hysteresis Compensation of Piezoelectric Actuator in Feedforward Applications. IEEE/ASME Trans. Mechatron. 2012, 18, 981–989. [Google Scholar] [CrossRef]
- Bazghaleh, M.; Grainger, S.; Mohammadzaheri, M. A Review of Charge Methods for Driving Piezoelectric Actuators. J. Intell. Mater. Syst. Struct. 2018, 29, 2096–2104. [Google Scholar] [CrossRef]
- Main, J.A.; Garcia, E.; Newton, D.V. Precision Position Control of Piezoelectric Actuators Using Charge Feedback. J. Guid. Control Dyn. 1995, 18, 1068–1073. [Google Scholar] [CrossRef]
- Fleming, A.J.; Moheimani, R. Improved Current and Charge Amplifiers for Driving Piezoelectric Loads, and Issues in Signal Processing Design for Synthesis of Shunt Damping Circuits. J. Intell. Mater. Syst. Struct. 2004, 15, 77–92. [Google Scholar] [CrossRef]
- Bazghaleh, M.; Grainger, S.; Cazzolato, B.; Lu, T.-F. An Innovative Digital Charge Amplifier to Reduce Hysteresis in Piezoelectric Actuators. In Proceedings of the Australian Robotics and Automation Association (ACRA), Brisbane, Australia, 1–3 December 2010. [Google Scholar]
- Newcomb, C.V.; Flinn, I. Improving the Linearity of Piezoelectric Ceramic Actuators. Electron. Lett. 1982, 18, 442–444. [Google Scholar] [CrossRef]
- Huang, L.; Ma, Y.T.; Feng, Z.H.; Kong, F.R. Switched Capacitor Charge Pump Reduces Hysteresis of Piezoelectric Actuators over a Large Frequency Range. Rev. Sci. Instrum. 2010, 81, 094701. [Google Scholar] [CrossRef] [PubMed]
- Comstock, R.H. Charge Control of Piezoelectric Actuators to Reduce Hysteresis Effects. U.S. Patent 4,263,527, 21 April 1981. [Google Scholar]
- Landau, I.D.; Zito, G. Digital Control Systems; Springer: London, UK, 2006. [Google Scholar]
- Mohammadzaheri, M.; Emadi, M.; Ghodsi, M.; Bahadur, I.M.; Zarog, M.; Saleem, A. Development of a Charge Estimator for Piezoelectric Actuators: A Radial Basis Function Approach. Int. J. Artif. Intell. Mach. Learn. (IJAIML) 2020, 10, 31–44. [Google Scholar] [CrossRef]
- Zhong, J.; Nishida, R.; Shinshi, T. A Digital Charge Control Strategy for Reducing the Hysteresis in Piezoelectric Actuators: Analysis, Design, and Implementation. Precis. Eng. 2021, 67, 370–382. [Google Scholar] [CrossRef]
- Mohammadzaheri, M.; Ziaiefar, H.; Ghodsi, M. Digital Charge Estimation for Piezoelectric Actuators: An Artificial Intelligence Approach. In Handbook of Research on New Investigations in Artificial Life, Ai, and Machine Learning; IGI Global: Hershey, PA, USA, 2022; pp. 117–140. [Google Scholar]
- Bazghaleh, M.; Grainger, S.; Cazzolato, B.; Lu, T. Using Frequency-Weighted Data Fusion to Improve the Performance of a Digital Charge Amplifier. In Proceedings of the IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012. [Google Scholar]
- Bazghaleh, M.; Grainger, S.; Mohammadzaheri, M.; Cazzolato, B.; Lu, T. A Digital Charge Amplifier for Hysteresis Elimination in Piezoelectric Actuators. Smart Mater. Struct. 2013, 22, 075016. [Google Scholar] [CrossRef]
- Fleming, A.J.; Moheimani, S.O.R. A Grounded-Load Charge Amplifier for Reducing Hysteresis in Piezoelectric Tube Scanners. Rev. Sci. Instrum. 2005, 76, 0737071-5. [Google Scholar] [CrossRef]
- PiezoDrive. Piezodrive Sa Stacks. 2023. Available online: https://www.piezodrive.com/actuators/150v-piezo-stack-actuators-2/ (accessed on 23 March 2023).











| Ae = 4.21 V CS = 20 μF | Ae = 7.42 V CS = 40 μF | Ae = 13.84 V CS = 80 μF | ||||
|---|---|---|---|---|---|---|
| fe (Hz) | qrange-I AS-I | qrange-II AS-II | qrange-I AS-I | qrange-II AS-II | qrange-I AS-I | qrange-II AS-II |
| 20 | 40 | 53.60 | 80 | 94.20 | 160 | 179.4 |
| 30 | 40 | 54.53 | 80 | 96.40 | 160 | 185.3 |
| 40 | 40 | 54.53 | 80 | 93.77 | 160 | 193.0 |
| 50 | 40 | 53.23 | 80 | 93.87 | 160 | 196.1 |
| 60 | 40 | 54.20 | 80 | 94.40 | 160 | 203.5 |
| 70 | 40 | 56.04 | 80 | 99.69 | 160 | 209.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohammadzaheri, M.; Al-Sulti, S.; Ghodsi, M.; Soltani, P. Charge Estimation of Piezoelectric Actuators: A Comparative Study. Energies 2023, 16, 3982. https://doi.org/10.3390/en16103982
Mohammadzaheri M, Al-Sulti S, Ghodsi M, Soltani P. Charge Estimation of Piezoelectric Actuators: A Comparative Study. Energies. 2023; 16(10):3982. https://doi.org/10.3390/en16103982
Chicago/Turabian StyleMohammadzaheri, Morteza, Sami Al-Sulti, Mojtaba Ghodsi, and Payam Soltani. 2023. "Charge Estimation of Piezoelectric Actuators: A Comparative Study" Energies 16, no. 10: 3982. https://doi.org/10.3390/en16103982
APA StyleMohammadzaheri, M., Al-Sulti, S., Ghodsi, M., & Soltani, P. (2023). Charge Estimation of Piezoelectric Actuators: A Comparative Study. Energies, 16(10), 3982. https://doi.org/10.3390/en16103982