
An Improved Technique of Hybridization of PSO for the Optimal Coordination of Directional Overcurrent Protection Relays of IEEE Bus System

 ,
, 

Abstract
:
1. Introduction
2. Problem Formulation
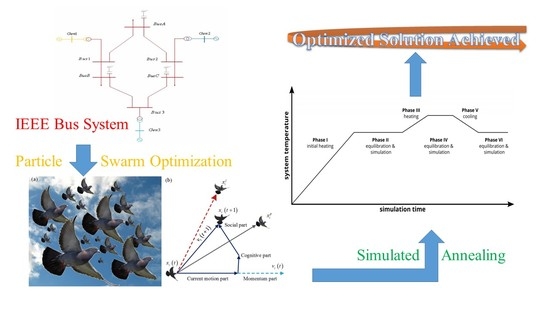
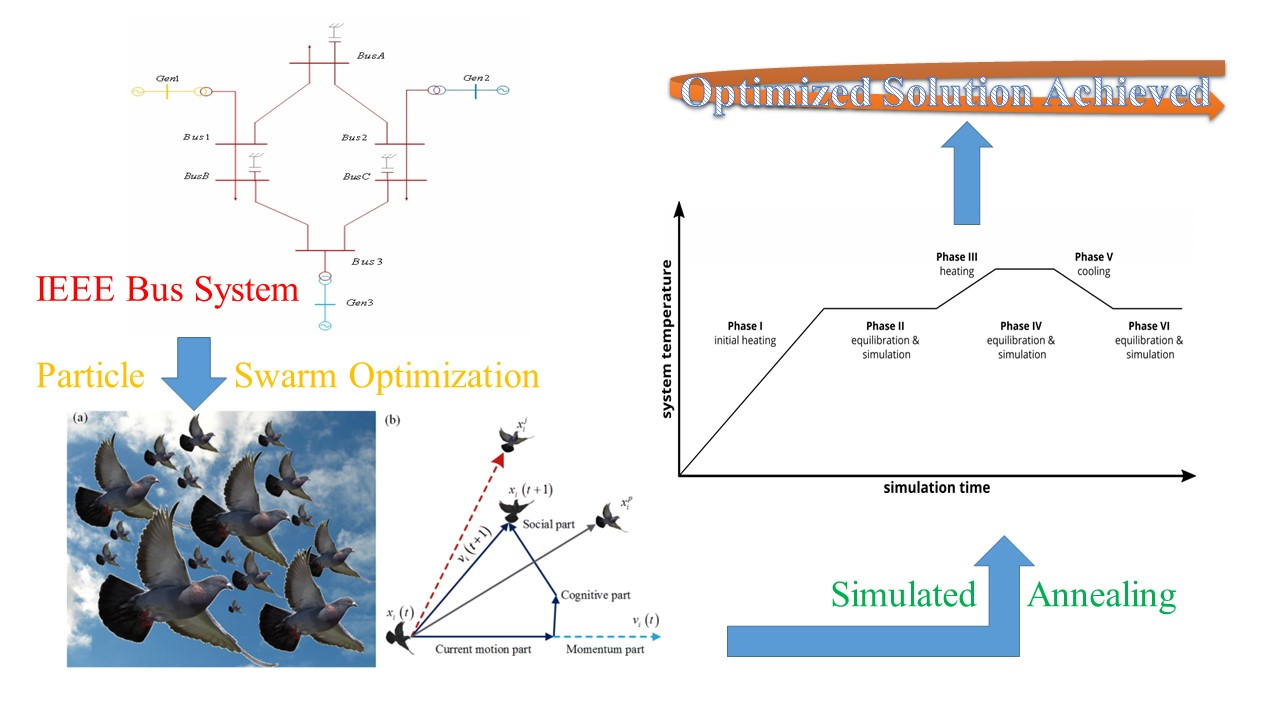
3. Optimization Algorithm for the Protection of Coordination Problems
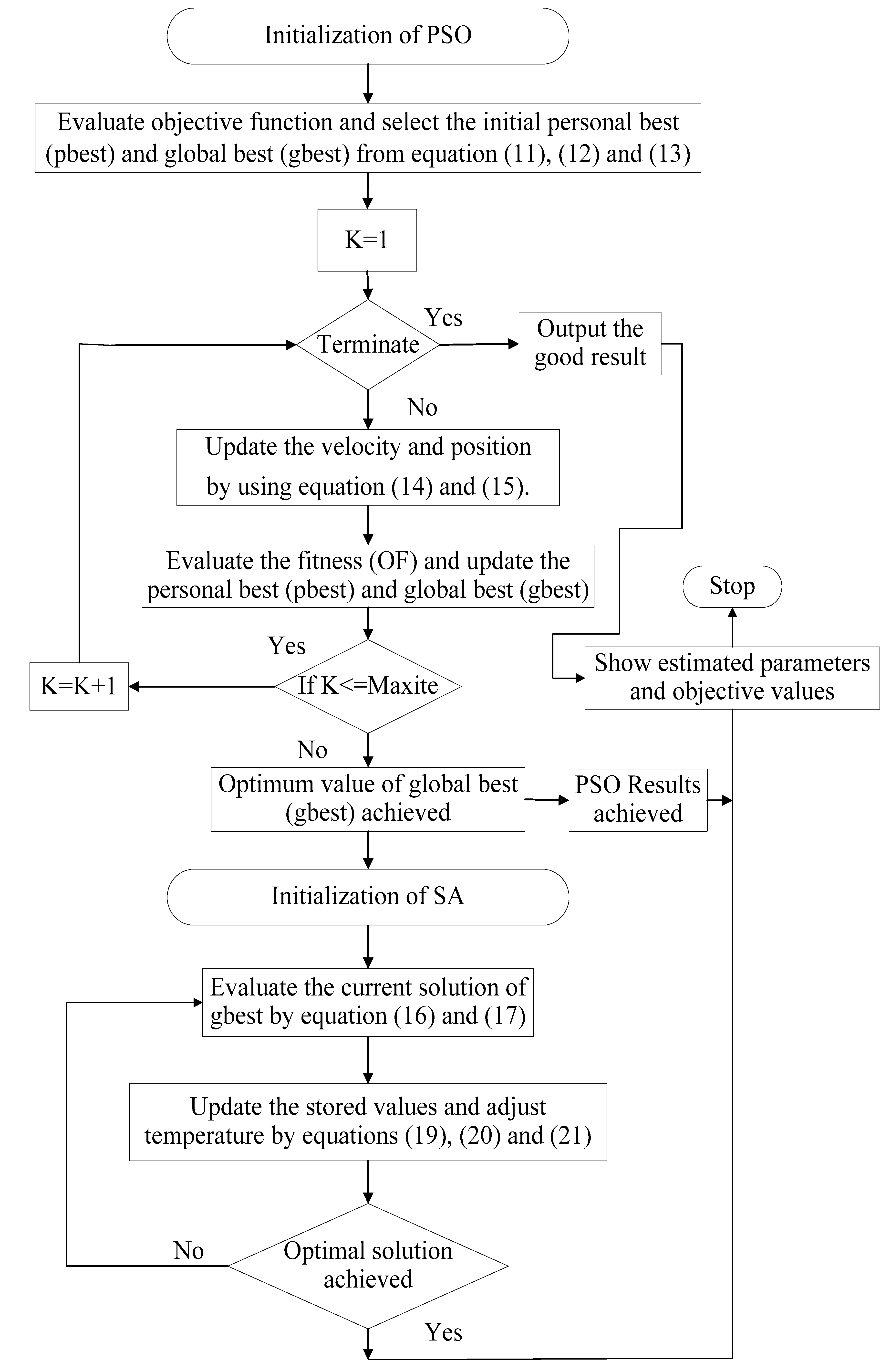
| Algorithm 1 Pseudocode of Hybrid Particle Swarm Optimization (HPSO) |
| Step 1: Initialize wmin,wmax (Inertia), c1,c2 (Acceleration Factor), r1,r2 (Random value), T0 (Initial Temperature) and α (Cooling Factor) for the Hybrid PSO (PSO–SA). |
| Step 1.1: Initialize the generation system within the parameter’s boundary conditions. |
| Step 1.2: The initial results are obtained after evaluating the objective function by using Equation (12). From the function, pbest is achieved; the minimum value of this function is gbest. |
| Step 2: This step belongs to the cycle of iteration until the desired results are achieved. |
| Step 2.1: Particle velocity and position is updated within a certain boundary limit by using the Equations (14) and (15). |
| Step 2.2: Result of pbest and gbest are achieved according to Equations (12) and (13). |
| Step 2.3: SA is started here after obtaining the gbest as the initial solution. |
| Step 2.4: Function for the new solution defined with respect to the old solution. |
| Step 2.5: The new solution is generated after evaluating the old solution. |
| Step 2.6: If the difference between the old and new solution is less than 0, the solution is accepted as a good solution by using Equation (18). |
| Step 2.7: Otherwise use Equation (19) until it satisfies step 2.6 |
| Step 2.8: From the objective function, the new solution is achieved. |
| Step 2.9: Update temperature according to Equation (21). |
| Step 2.10: Repeat Step 2 until the stopping criterion is met. |
| Step 3: Show estimated parameters, objective values, and gbest solution. |
4. Simulation Results and Discussion of IEEE Bus Systems
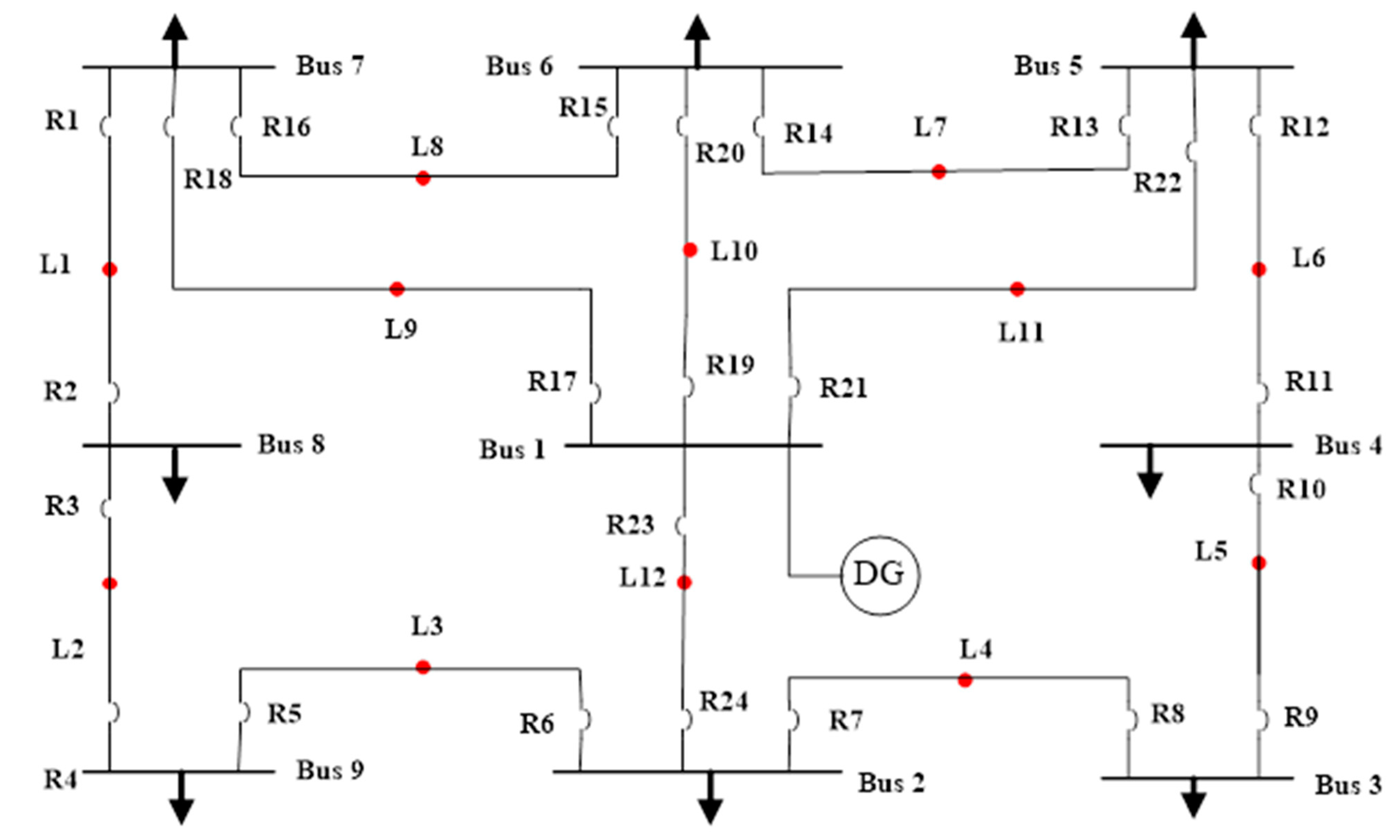
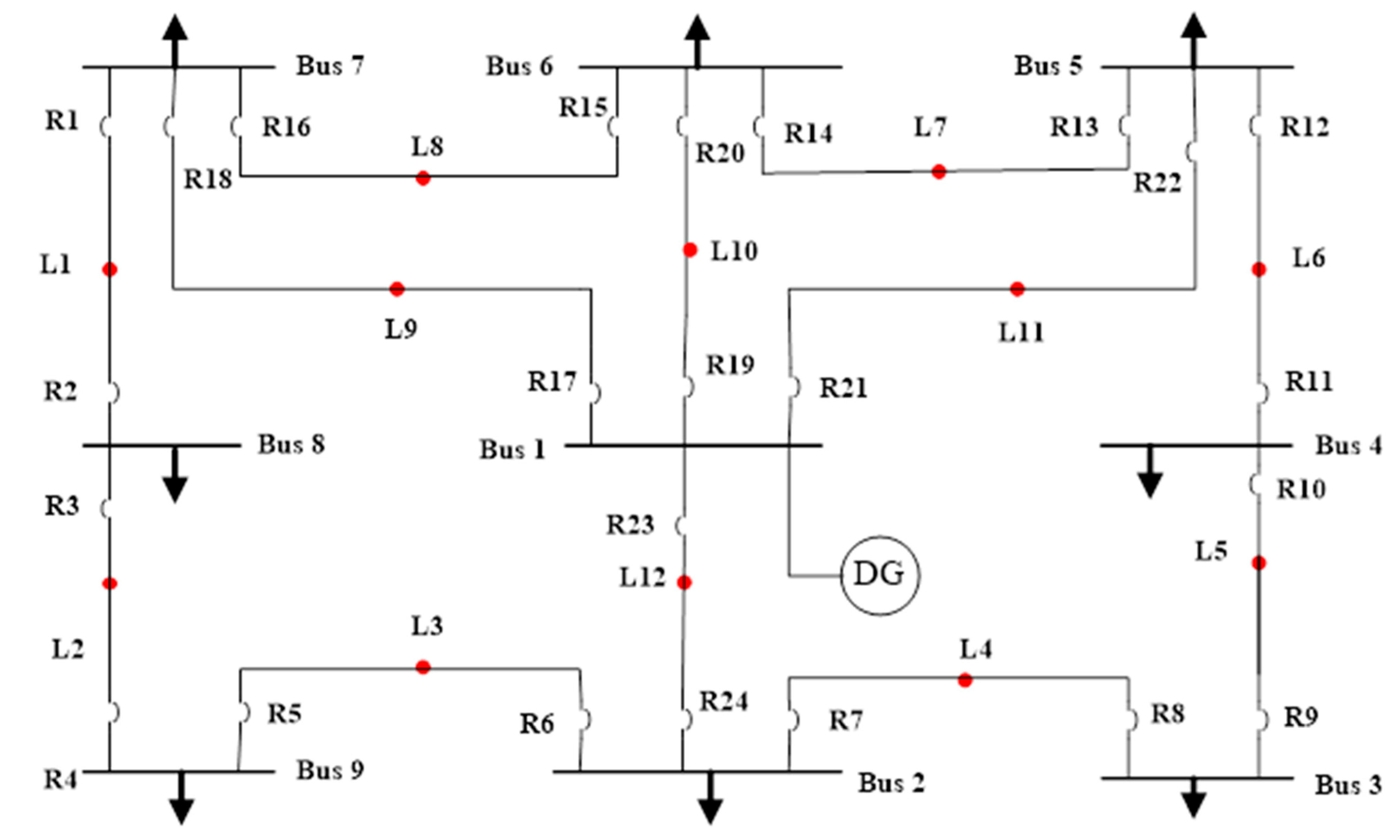
4.1. Case 1: IEEE 9-Bus System
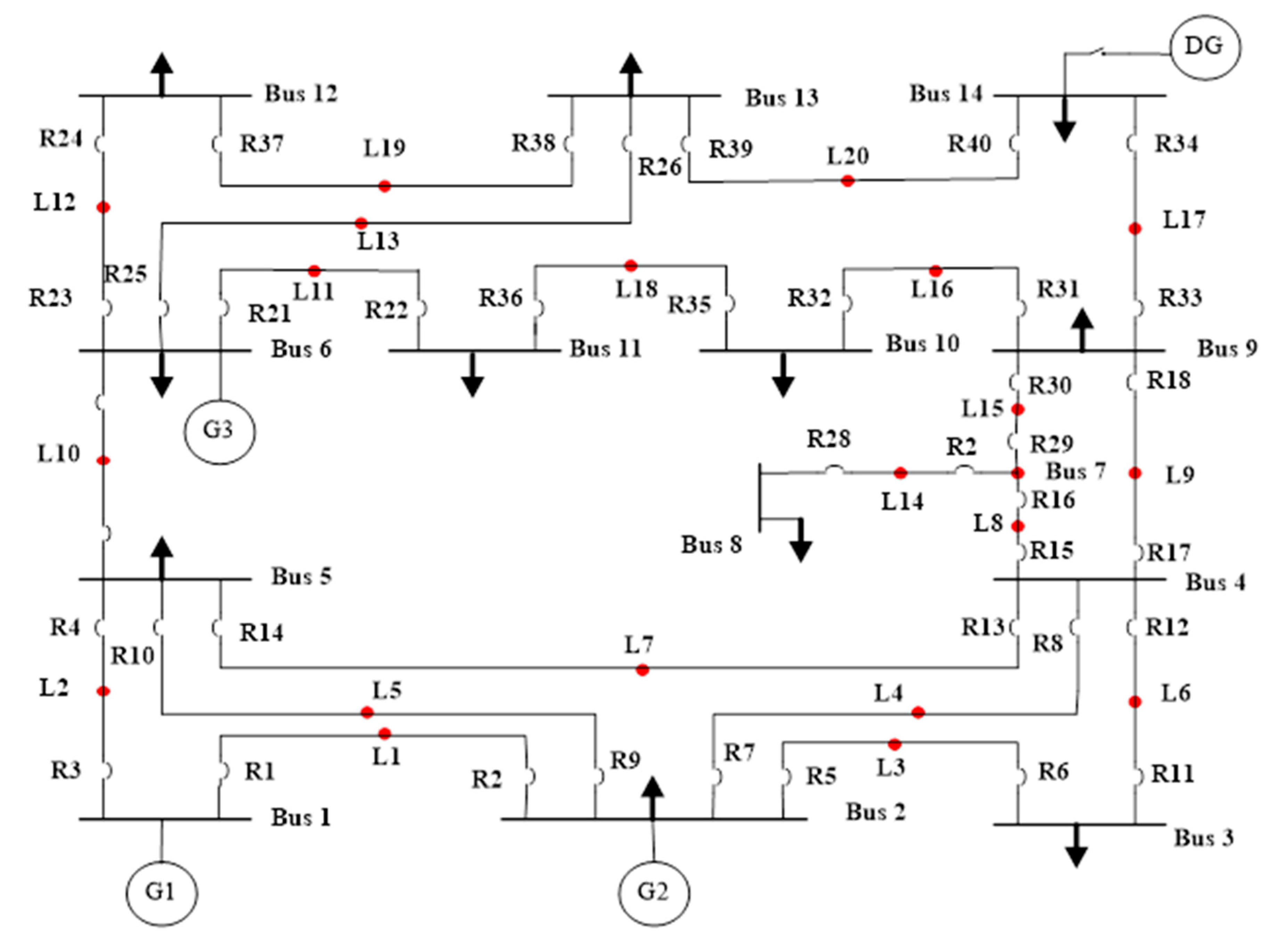
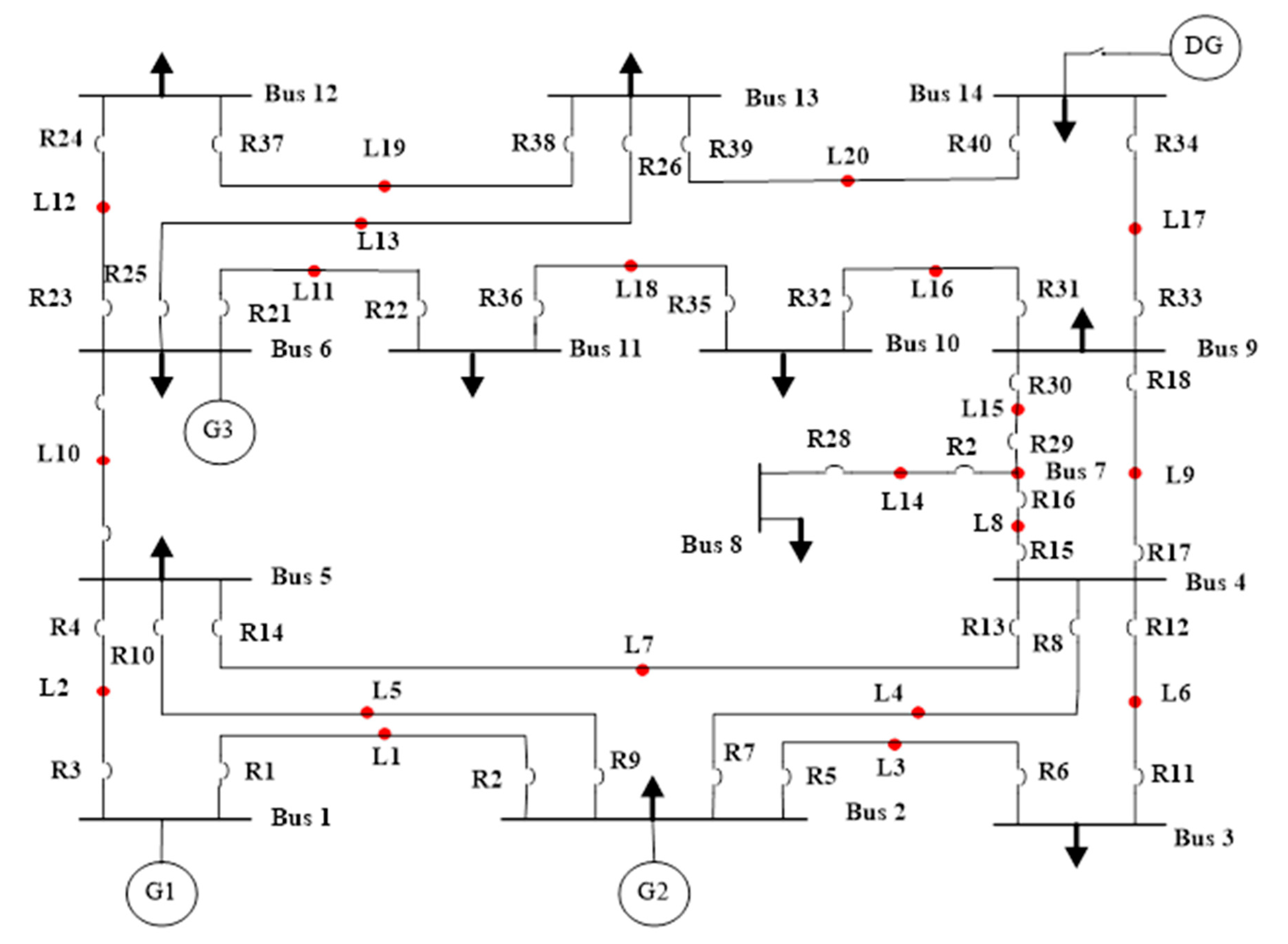
4.2. Case 2: IEEE 14-Bus System
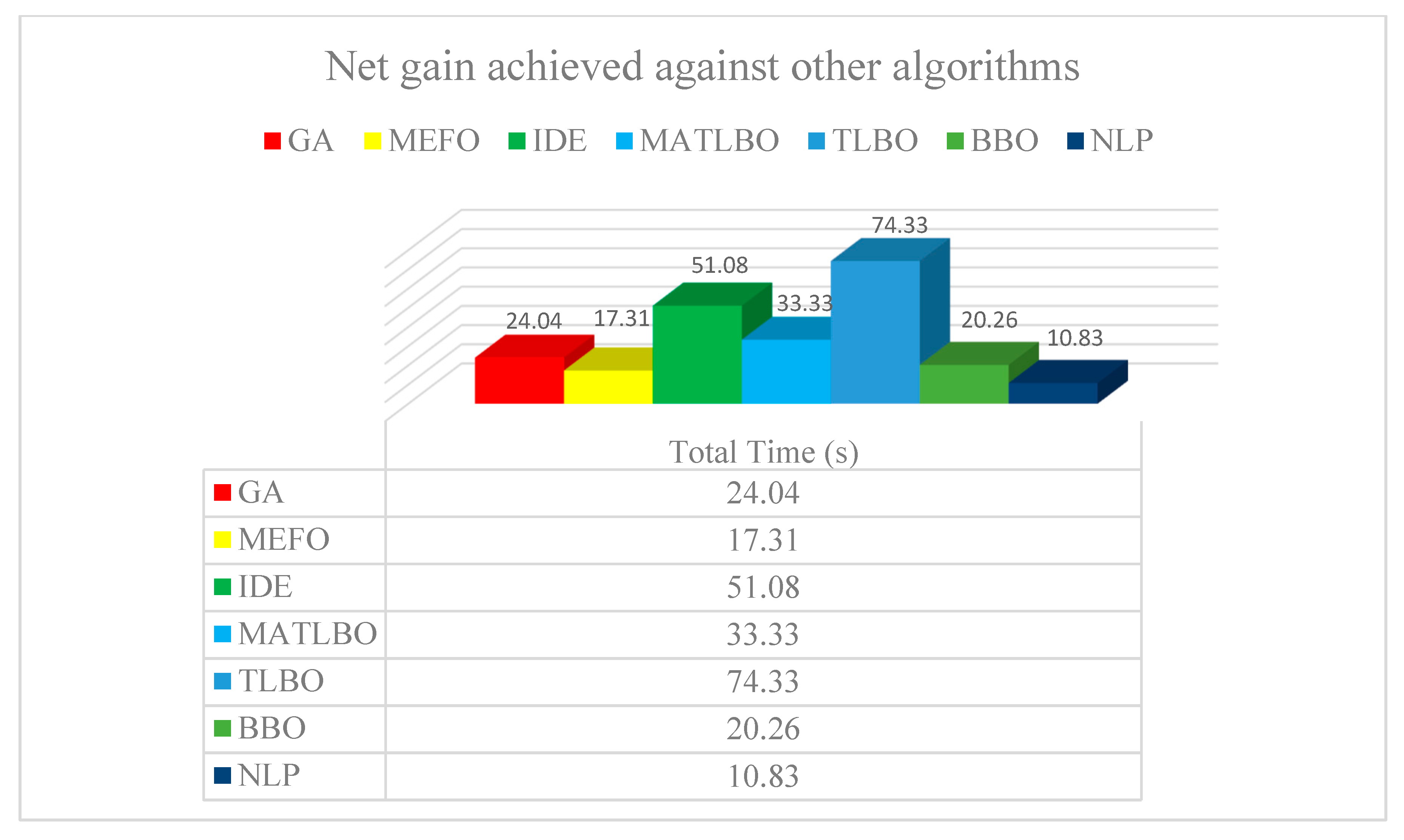
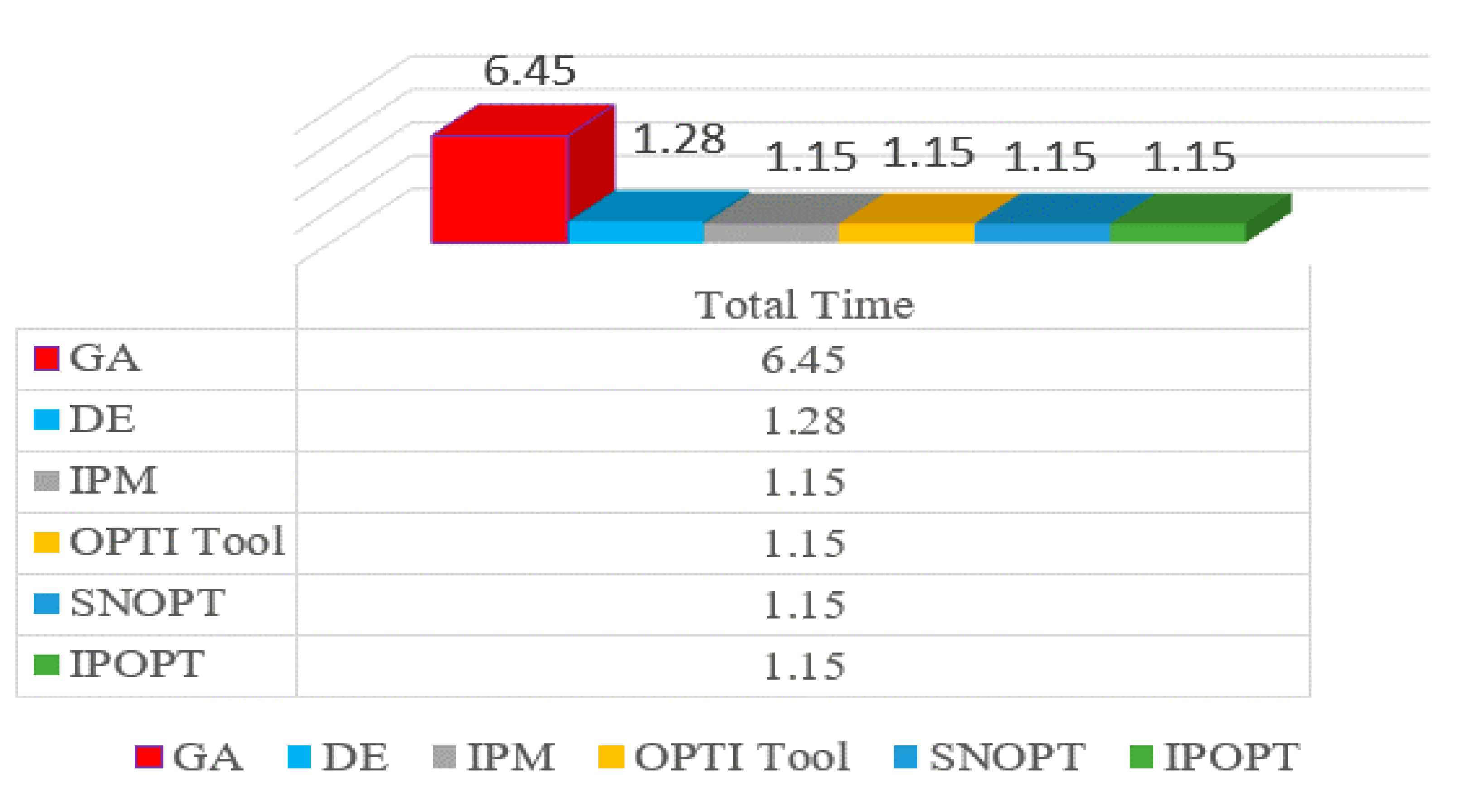
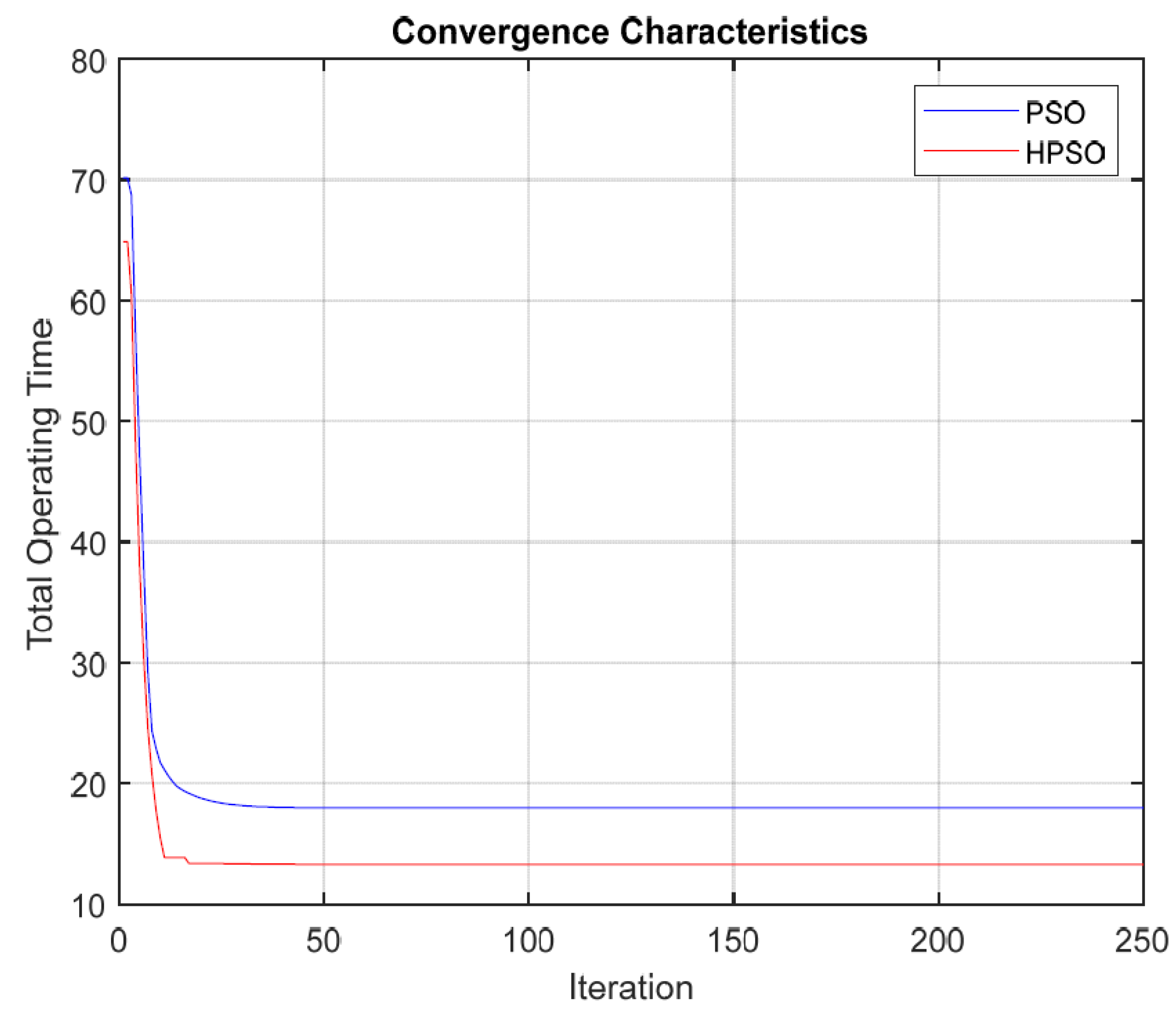
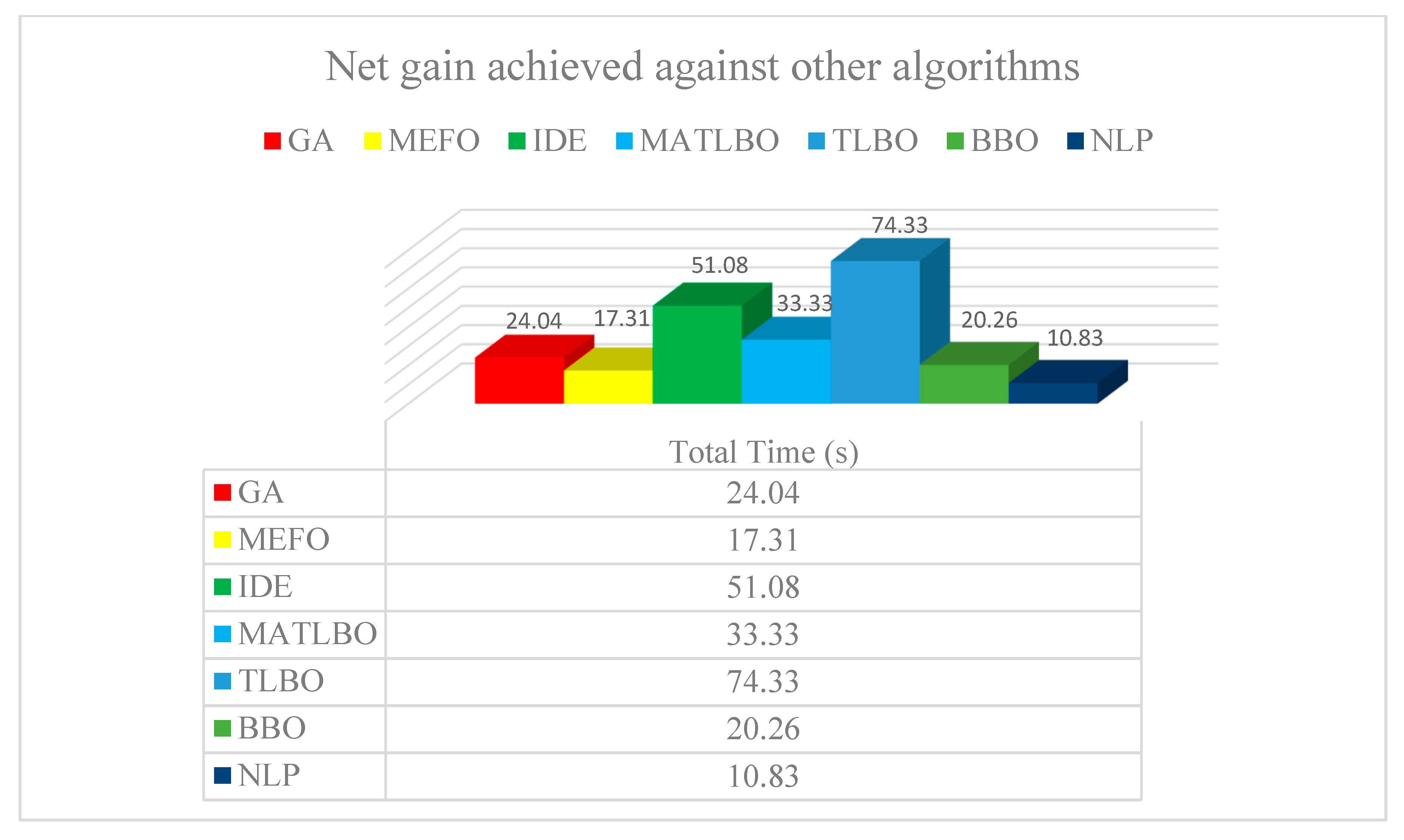
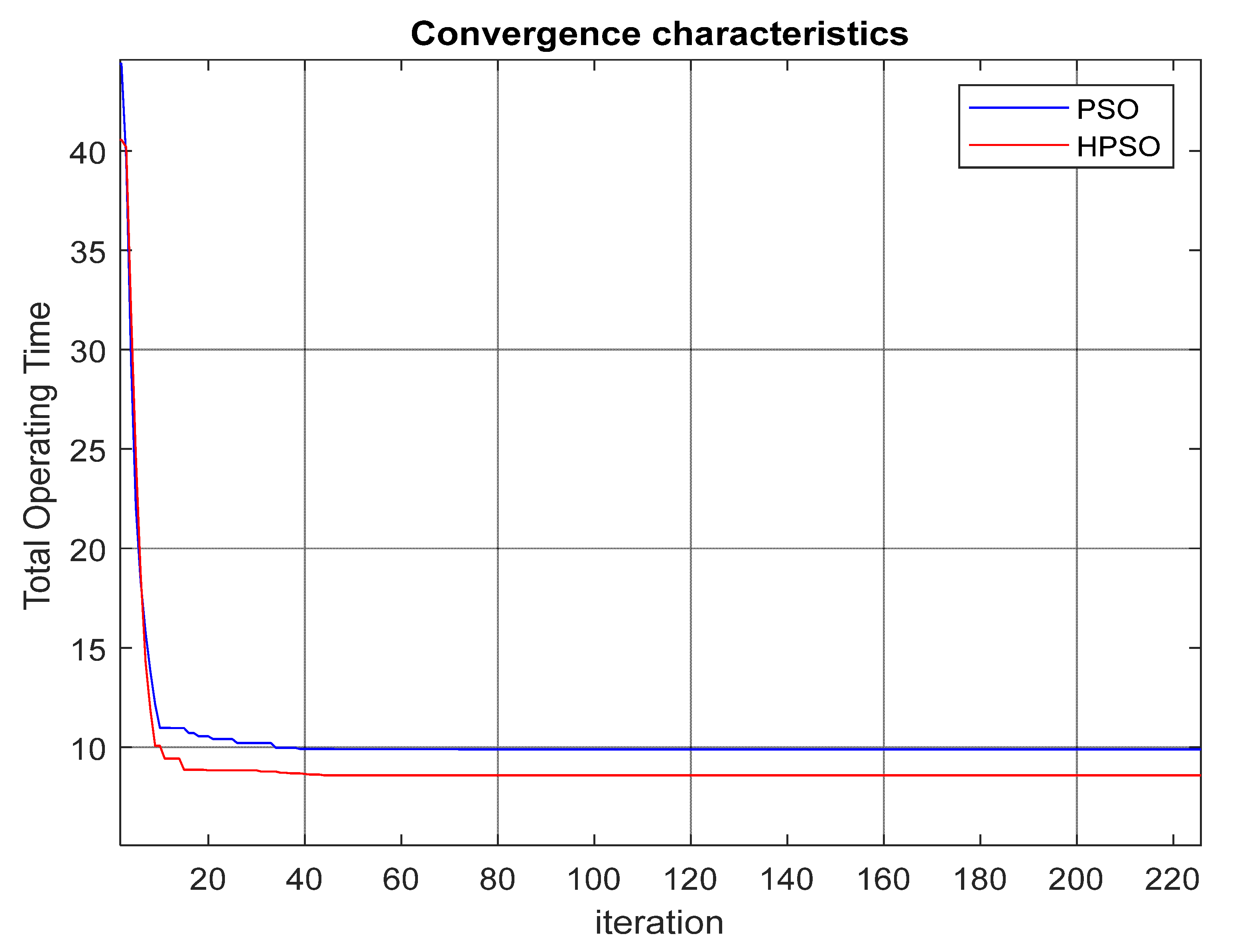
4.3. Results Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Blackburn, J. Protective Relaying, Principles and Applications; Marcel Dekker Inc.: New York, NY, USA, 1987. [Google Scholar]
- Irfan, M.; Oh, S.; Rhee, S. An Effective Coordination Setting for Directional Overcurrent Relays Using Modified Harris Hawk Optimization. Electronics 2021, 10, 3007. [Google Scholar] [CrossRef]
- AbdelHamid, M.; Kamel, S.; MAhmed Korashy, A.; Veliz, M.; Fahd, A.; Mosaad, M. An Adaptive Protection Scheme for Coordination of Distance and Directional Overcurrent Relays in Distribution Systems Based on a Modified School-Based Optimizer. Electronics 2021, 10, 2628. [Google Scholar] [CrossRef]
- Bedekar, P.P.; Bhide, S.R. Optimum coordination of overcurrent relay timing using continuous genetic algorithm. Expert Syst. Appl. 2011, 38, 11286–11292. [Google Scholar] [CrossRef]
- Habib, K.; Lai, X.; Wadood, A.; Khan, S.; Wang, Y.; Xu, S. Hybridization of PSO for the Optimal Coordination of Directional Overcurrent Protection Relays. Electronics 2022, 11, 180. [Google Scholar] [CrossRef]
- Sulaiman, M.; Muhammad, S.; Khan, A. Improved solutions for the optimal coordination of DOCRs using firefly algorithm. Complexity 2018, 2018, 7039790. [Google Scholar] [CrossRef] [Green Version]
- Khurshaid, T.; Wadood, A.; Farkoush, S.G.; Kim, C.H.; Yu, J.; Rhee, S.B. Improved firefly algorithm for the optimal coordination of directional overcurrent relays. IEEE Access 2019, 7, 78503–78514. [Google Scholar] [CrossRef]
- Wadood, A.; Khurshaid, T.; Farkoush, S.G.; Yu, J.; Kim, C.H.; Rhee, S.B. Nature-inspired whale optimization algorithm for optimal coordination of directional overcurrent relays in power systems. Energies 2019, 12, 2297. [Google Scholar] [CrossRef] [Green Version]
- Wadood, A.; Farkoush, S.G.; Khurshaid, T.; Yu, J.T.; Kim, C.H.; Rhee, S.B. Application of the jaya algorithm in solving the problem of the optimal coordination of overcurrent relays in single-and multi-loop distribution systems. Complexity 2019, 2019, 5876318. [Google Scholar] [CrossRef]
- Bouchekara, H.R.E.H.; Zellagui, M.; Abido, M.A. Optimal coordination of directional overcurrent relays using a modified electromagnetic field optimization algorithm. Appl. Soft Comput. 2017, 54, 267–283. [Google Scholar] [CrossRef]
- Singh, M.; Panigrahi, B.; Abhyankar, A. Optimal coordination of directional over-current relays using teaching learning-based optimization (TLBO) algorithm. Int. J. Electr. Power Energy Syst. 2013, 50, 33–41. [Google Scholar] [CrossRef]
- Wadood, A.; Farkoush, S.G.; Khurshaid, T.; Kim, C.H.; Yu, J.; Geem, Z.W. An optimized protection coordination scheme for the optimal coordination of overcurrent relays using a nature-inspired root tree algorithm. Appl. Sci. 2018, 8, 1664. [Google Scholar] [CrossRef] [Green Version]
- Yang, H.; Wen, F.; Ledwich, G. Optimal coordination of overcurrent relays in distribution systems with distributed generators based on differential evolution algorithm. Int. Trans. Electr. Energy Syst. 2013, 23, 1–12. [Google Scholar] [CrossRef]
- Chelliah, T.R.; Thangaraj, R.; Allamsetty, S.; Pant, M. Coordination of directional overcurrent relays using opposition based chaotic differential evolution algorithm. Int. J. Electr. Power Energy Syst. 2014, 55, 341–350. [Google Scholar] [CrossRef]
- Jamal, N.; Sulaiman, M.; Aliman, O.; Mustaffa, Z.; Mustafa, M. Improved Grey Wolf Optimization Algorithm for Overcurrent Relays Coordination. In Proceedings of the 2018 9th IEEE Control and System Graduate Research Colloquium (ICSGRC), Shah Alam, Malaysia, 3–4 August 2018. [Google Scholar]
- Amraee, T. Coordination of directional overcurrent relays using seeker algorithm. IEEE Trans. Power Deliv. 2012, 27, 1415–1422. [Google Scholar] [CrossRef]
- Kalage, A.A.; Ghawghawe, N.D. Optimum coordination of directional overcurrent relays using modified adaptive teaching learning based optimization algorithm. Intell. Ind. Syst. 2016, 2, 55–71. [Google Scholar] [CrossRef] [Green Version]
- Noghabi, A.S.; Sadeh, J.; Mashhadi, H.R. Considering different network topologies in optimal overcurrent relay coordination using a hybrid GA. IEEE Trans. Power Deliv. 2009, 24, 1857–1863. [Google Scholar] [CrossRef]
- Nabab, M. Adaptive Protection Coordination Scheme Using Numerical Directional Overcurrent Relays. IEEE Trans. Ind. Inform. 2019, 15, 64–73. [Google Scholar]
- AMPL (A Modeling Language for Mathematical Programming). 2014. Available online: www.ampl.com (accessed on 1 February 2022).
- GAMS (General Algebraic Modelling System). 2017. Available online: www.gams.com (accessed on 1 March 2022).
- Park, J.B.; Lee, K.S.; Shin, J.R.; Lee, K.Y. A Particle swarm optimization for economic dispatch with non-smooth cost functions. IEEE Trans. Power Syst. 2005, 20, 34–42. [Google Scholar] [CrossRef]
- Razavi, F.; Abyaneh, H.A.; Al-Dabbagh, M.; Mohammadi, R.; Torkaman, H. A new comprehensive genetic algorithm method for optimal overcurrent relays coordination. Electr. Power Syst. Res. 2008, 78, 713–720. [Google Scholar] [CrossRef]
- Destina, S.; Margo, P.; Purnomo, M.; Daeng, R. Adaptive DOCR coordination in the loop distribution system with distributed generation using firefly algorithm-artificial neural network. In Proceedings of the International Conference on Information and Communication Technology, Kuala Lumpur, Malaysia, 23–25 July 2018; pp. 579–584. [Google Scholar]
- Yu, J.; Kim, C.H.; Rhee, S.B. Oppositional Jaya Algorithm With Distance-Adaptive Coefficient in Solving Directional Over Current Relays Coordination Problem. IEEE Access 2019, 7, 150742. [Google Scholar] [CrossRef]
- Albasri, F.A.; Alroomi, A.R.; Talaq, J.H. Optimal coordination of directional overcurrent relays using biogeography-based optimization algorithms. IEEE Trans. Power Deliv. 2015, 30, 1810–1820. [Google Scholar] [CrossRef]
- Bedekar, P.P.; Bhide, S.R. Optimum coordination of directional overcurrent relays using the hybrid GA-NLP approach. IEEE Trans. Power Deliv. 2011, 26, 109–119. [Google Scholar] [CrossRef]
- Yang, M.T.; Liu, A. Applying hybrid PSO to optimize directional over current relay coordination in different network topologies. J. Appl. Math. 2013, 2013, 20131–20139. [Google Scholar] [CrossRef]
- Idoumghar, L.; Melkemi, M.; Schott, R.; Aouad, M.I. Hybrid PSO-SA type algorithms for multimodal function optimization and reducing energy consumption in embedded systems. Appl. Comput. Intell. Soft Comput. 2011, 2011, 138078. [Google Scholar] [CrossRef] [Green Version]
- Sadati, N.; Zamani, M.; Mahdavian, H.R.F. Hybrid particle swarm-based-simulated annealing optimization techniques. In Proceedings of the IECON 2006—32nd Annual Conference on IEEE Industrial Electronics, Paris, France, 6–10 November 2006. [Google Scholar]
- Abhyaneh, H.A.; Al-Dabbagh, M.; Karegar, H.K.; Sadeghi, S.H.H.; Khan, R.A.J. A new optimal approach for coordination of directional overcurrent relays in interconnected power system. IEEE Trans. Power Deliv. 2003, 18, 430–435. [Google Scholar] [CrossRef]
- Abdelaziz, A.Y.; Talaat, H.E.A.; Nosseir, A.I.; Hajjar, A.A. An adaptive protection scheme for optimal coordination of overcurrent relays. Electr. Power Syst. Res. 2002, 61, 1–9. [Google Scholar] [CrossRef]
- Urdaneta, A.J.; Perez, L.G.; Restrepo, H. Optimal coordination of directional overcurrent relays considering dynamic changes in the network topology. IEEE Trans. Power Deliv. 1997, 12, 1458–1464. [Google Scholar] [CrossRef]
- Mansour, M.M.; Mekhamer, S.F.; El-Kharbawe, N.E.-S. A modified particle swarm optimizer for the coordination of directional overcurrent relays. IEEE Trans. Power Deliv. 2007, 22, 1400–1410. [Google Scholar] [CrossRef]
- Sevkli, M.; Guner, A.R. A continuous particle swarm optimization algorithm for uncapacitated facility location problem. In Ant Colony Optimization and Swarm Intelligence; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Kirkpatrick, S.; Gellat, C.D.; Vecchi, M.P. Optimization by Simulated Annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef] [PubMed]
- Christie, R. Power System Test Cases. 1993. Available online: www.ee.washington.edu/research/pstca (accessed on 1 March 2022).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Faulty Point | Primary Relay | Backup Relay | Faulty Point | Primary Relay | Backup Relay |
|---|---|---|---|---|---|
| L1 | 1 | 15, 17 | L7 | 13 | 11, 21 |
| 2 | 4 | 14 | 16, 19 | ||
| L2 | 3 | 1 | L8 | 15 | 13, 19 |
| 4 | 6 | 16 | 2, 17 | ||
| L3 | 5 | 3 | L9 | 17 | NB |
| 6 | 8, 23 | 18 | 2, 15 | ||
| L4 | 7 | 5, 23 | L10 | 19 | NB |
| 8 | 10 | 20 | 13, 16 | ||
| L5 | 9 | 7 | L11 | 21 | NB |
| 10 | 12 | 22 | 11, 14 | ||
| L6 | 11 | 9 | L12 | 23 | NB |
| 12 | 14, 21 | 24 | 5, 8 |
| Relays | Relays | ||||
|---|---|---|---|---|---|
| R1 | 4863.6 | 1361.6 | R13 | 3684.5 | 1031.7 |
| R2 | 1634.4 | 653.6 | R14 | 4172.5 | 1168.3 |
| R3 | 2811.4 | 1124.4 | R15 | 4172.5 | 1168.3 |
| R4 | 2610.5 | 1044.2 | R16 | 3684.5 | 1031.7 |
| R5 | 1778.0 | 711.2 | R17 | 7611.2 | 1293.9 |
| R6 | 4378.5 | 1226.0 | R18 | 2271.7 | 1953.7 |
| R7 | 4378.5 | 1226.0 | R19 | 7435.8 | 1264.1 |
| R8 | 1778.0 | 711.2 | R20 | 2624.2 | 2256.8 |
| R9 | 2610.5 | 1044.2 | R21 | 7611.2 | 1293.9 |
| R10 | 2811.4 | 1124.4 | R22 | 2271.7 | 1953.7 |
| R11 | 1634.4 | 653.6 | R23 | 7914.7 | 1345.5 |
| R12 | 2811.4 | 787.2 | R24 | 1665.5 | 1432.3 |
| TMS | PSO | HPSO | TMS | PSO | HPSO |
|---|---|---|---|---|---|
| Relay 1 | 0.3142 | 0.1000 | Relay 13 | 0.1000 | 0.1000 |
| Relay 2 | 0.1000 | 0.1000 | Relay 14 | 0.1000 | 0.1000 |
| Relay 3 | 0.1000 | 0.2168 | Relay 15 | 0.1000 | 0.1000 |
| Relay 4 | 0.1000 | 0.1000 | Relay 16 | 0.1000 | 0.1000 |
| Relay 5 | 0.1066 | 0.1000 | Relay 17 | 0.3648 | 0.1000 |
| Relay 6 | 0.4362 | 0.1081 | Relay 18 | 0.1000 | 0.1000 |
| Relay 7 | 0.2423 | 0.3137 | Relay 19 | 0.1000 | 0.1041 |
| Relay 8 | 0.2900 | 0.1000 | Relay 20 | 0.1000 | 0.1000 |
| Relay 9 | 0.1000 | 0.1000 | Relay 21 | 0.1616 | 0.1526 |
| Relay 10 | 0.1000 | 0.1000 | Relay 22 | 0.1000 | 0.2499 |
| Relay 11 | 0.1000 | 0.2419 | Relay 23 | 0.1000 | 0.1000 |
| Relay 12 | 0.1000 | 0.1000 | Relay 24 | 0.2054 | 0.1000 |
| Objective Function (F) | 9.8894 | 8.5732 |
| Optimization Techniques | Objective Function (F) |
|---|---|
| GA [27] | 32.6058 |
| MEFO [10] | 25.884 |
| IDE [17] | 59.6471 |
| MATLBO [17] | 41.9041 |
| TLBO [17] | 82.9012 |
| BBO [16] | 28.8348 |
| NLP [18] | 19.4041 |
| PSO | 9.8894 |
| HPSO | 8.5732 |
| No. of Relays | Operating Time of Each Relay (s) | No. of Relays | Operating Time of Each Relay (s) | ||
|---|---|---|---|---|---|
| PSO | HPSO | PSO | HPSO | ||
| Relay 1 | 0.7192 | 0.2289 | Relay 13 | 0.2532 | 0.2532 |
| Relay 2 | 0.3659 | 0.3659 | Relay 14 | 0.2418 | 0.2418 |
| Relay 3 | 0.2823 | 0.6121 | Relay 15 | 0.2418 | 0.2418 |
| Relay 4 | 0.2915 | 0.2915 | Relay 16 | 0.2532 | 0.2532 |
| Relay 5 | 0.3730 | 0.3499 | Relay 17 | 0.7223 | 0.1980 |
| Relay 6 | 1.0363 | 0.2568 | Relay 18 | 0.3102 | 0.3102 |
| Relay 7 | 0.5756 | 0.7452 | Relay 19 | 0.1994 | 0.2076 |
| Relay 8 | 0.9411 | 0.3499 | Relay 20 | 0.2908 | 0.2908 |
| Relay 9 | 0.2915 | 0.2915 | Relay 21 | 0.3200 | 0.3022 |
| Relay 10 | 0.2823 | 0.2823 | Relay 22 | 0.3102 | 0.7753 |
| Relay 11 | 0.3659 | 0.8850 | Relay 23 | 0.1957 | 0.1957 |
| Relay 12 | 0.2823 | 0.2823 | Relay 24 | 0.7439 | 0.3622 |
| Relay | CT Ratio | Relay | CT Ratio |
|---|---|---|---|
| 1 | 8000:5 | 7 | 2500:5 |
| 2, 4, 8, 10, 13, 24 | 400:5 | 12, 36, 39 | 2000:5 |
| 3, 14 | 3500:5 | 20, 35, 38 | 1000:5 |
| 5, 25 | 4000:5 | 16, 18 | 800:5 |
| 9, 19, 23, 27, 31 | 1600:5 | 17, 26, 34 | 500:5 |
| 15, 30, 33 | 1200:5 | 22, 32, 37, 40 | 600:5 |
| 6 | 200:5 | 11 | 250:5 |
| 21 | 3000:5 | 28 | 50:5 |
| 29 | 5000:5 |
| Faulty Point | Primary Relay | Backup Relay | Faulty Point | Primary Relay | Backup Relay |
|---|---|---|---|---|---|
| L1 | 1 | 4 | L11 | 21 | 19, 24, 26 |
| 2 | 6, 8, 10 | 22 | 35 | ||
| L2 | 3 | 2 | L12 | 23 | 19, 22, 26 |
| 4 | 9, 13, 20 | 24 | 38 | ||
| L3 | 5 | 1, 8, 10 | L13 | 25 | 19, 22, 24 |
| 6 | 12 | 26 | 37, 40 | ||
| L4 | 7 | 1, 6, 10 | L14 | 27 | 15, 30 |
| 8 | 11, 14, 16, 18 | 28 | - | ||
| L5 | 9 | 1, 6, 8 | L15 | 29 | 15, 28 |
| 10 | 3, 13, 20 | 30 | 17, 32, 34 | ||
| L6 | 11 | 5 | L16 | 31 | 17, 29, 34 |
| 12 | 7, 14, 16, 18 | 32 | 36 | ||
| L7 | 13 | 7, 11, 16, 18 | L17 | 33 | 17, 29, 32 |
| 14 | 3, 9, 20 | 34 | 39 | ||
| L8 | 15 | 7, 11, 14, 18 | L18 | 35 | 31 |
| 16 | 28, 30 | 36 | 21 | ||
| L9 | 17 | 7, 11, 14, 16 | L19 | 37 | 23 |
| 18 | 29, 32, 34 | 38 | 25, 40 | ||
| L10 | 19 | 3, 9, 13 | L20 | 39 | 25, 37 |
| 20 | 22, 24, 26 | 40 | 33 |
| Relays | Relays | ||||
|---|---|---|---|---|---|
| R1 | 11,650 | 3920 | R21 | 564 | 434 |
| R2 | 4260 | 1980 | R22 | 1930 | 1310 |
| R3 | 7310 | 1280 | R23 | 1200 | 806 |
| R4 | 3920 | 750 | R24 | 1870 | 1130 |
| R5 | 12,400 | 1370 | R25 | 1430 | 449 |
| R6 | 3830 | 654 | R26 | 4640 | 1230 |
| R7 | 7330 | 1270 | R27 | 2030 | 638 |
| R8 | 3880 | 723 | R28 | 633 | 634 |
| R9 | 3260 | 2080 | R29 | 4720 | 499 |
| R10 | 3110 | 1990 | R30 | 1810 | 179 |
| R11 | 7180 | 1380 | R31 | 2060 | 783 |
| R12 | 3130 | 845 | R32 | 547 | 280 |
| R13 | 3280 | 1120 | R33 | 783 | 368 |
| R14 | 4030 | 1250 | R34 | 1390 | 547 |
| R15 | 4610 | 1110 | R35 | 1480 | 572 |
| R16 | 1490 | 560 | R36 | 781 | 284 |
| R17 | 2210 | 955 | R37 | 572 | 51 |
| R18 | 725 | 388 | R38 | 2530 | 781 |
| R19 | 955 | 564 | R39 | 2400 | 1110 |
| R20 | 1310 | 725 | R40 | 654 | 191 |
| TMS | PSO | HPSO | TMS | PSO | HPSO |
|---|---|---|---|---|---|
| Relay 1 | 0.2492 | 0.1000 | Relay 21 | 0.1000 | 0.1000 |
| Relay 2 | 0.1000 | 0.1000 | Relay 22 | 0.1000 | 0.1578 |
| Relay 3 | 0.5250 | 0.1000 | Relay 23 | 0.1000 | 0.1000 |
| Relay 4 | 0.1000 | 0.1000 | Relay 24 | 0.2958 | 0.1000 |
| Relay 5 | 0.1000 | 0.1000 | Relay 25 | 0.1000 | 0.2603 |
| Relay 6 | 0.2204 | 0.1000 | Relay 26 | 0.9851 | 0.1000 |
| Relay 7 | 0.3004 | 0.1000 | Relay 27 | 0.1000 | 0.1530 |
| Relay 8 | 0.3894 | 0.1000 | Relay 28 | 0.1000 | 0.1000 |
| Relay 9 | 0.1000 | 0.1000 | Relay 29 | 0.5677 | 0.1000 |
| Relay 10 | 0.2561 | 0.1000 | Relay 30 | 0.1000 | 0.2420 |
| Relay 11 | 0.4437 | 0.1000 | Relay 31 | 0.1000 | 0.1500 |
| Relay 12 | 0.2635 | 0.1000 | Relay 32 | 0.1000 | 0.1000 |
| Relay 13 | 0.1000 | 0.1000 | Relay 33 | 0.1000 | 0.1591 |
| Relay 14 | 0.3072 | 0.1002 | Relay 34 | 0.1000 | 0.1000 |
| Relay 15 | 0.1000 | 0.1000 | Relay 35 | 0.1000 | 0.1000 |
| Relay 16 | 0.1000 | 0.1000 | Relay 36 | 0.1000 | 0.1000 |
| Relay 17 | 0.1000 | 0.1000 | Relay 37 | 0.1000 | 0.2000 |
| Relay 18 | 0.1000 | 0.1000 | Relay 38 | 0.1000 | 0.1000 |
| Relay 19 | 0.1000 | 0.1000 | Relay 39 | 0.1000 | 0.1000 |
| Relay 20 | 0.1000 | 0.1000 | Relay 40 | 0.1000 | 0.2868 |
| Objective Function (F) | 17.2757 | 13.2817 |
| No. of Relays | Operating Time of Each Relay (s) | No. of Relays | Operating Time of Each Relay (s) | ||
|---|---|---|---|---|---|
| PSO | HPSO | PSO | HPSO | ||
| Relay 1 | 0.6340 | 0.2544 | Relay 21 | 1.1019 | 1.1019 |
| Relay 2 | 0.1431 | 0.1431 | Relay 22 | 0.1948 | 0.3073 |
| Relay 3 | 1.1729 | 0.2234 | Relay 23 | 0.3405 | 0.3405 |
| Relay 4 | 0.1458 | 0.1458 | Relay 24 | 0.1752 | 0.1752 |
| Relay 5 | 0.1969 | 0.1969 | Relay 25 | 0.5425 | 1.4121 |
| Relay 6 | 0.2784 | 0.1263 | Relay 26 | 1.4542 | 0.1476 |
| Relay 7 | 0.6017 | 0.2003 | Relay 27 | 0.2686 | 0.4109 |
| Relay 8 | 0.5690 | 0.1461 | Relay 28 | 0.1377 | 0.1377 |
| Relay 9 | 0.2253 | 0.2253 | Relay 29 | 1.7307 | 0.3049 |
| Relay 10 | 0.3941 | 0.1539 | Relay 30 | 0.2510 | 0.6075 |
| Relay 11 | 0.5183 | 0.1168 | Relay 31 | 0.2670 | 0.4005 |
| Relay 12 | 0.6523 | 0.2476 | Relay 32 | 0.3098 | 0.3098 |
| Relay 13 | 0.1520 | 0.1520 | Relay 33 | 0.3662 | 0.5827 |
| Relay 14 | 0.8587 | 0.2801 | Relay 34 | 0.2036 | 0.2036 |
| Relay 15 | 0.1849 | 0.1849 | Relay 35 | 0.2528 | 0.2528 |
| Relay 16 | 0.2324 | 0.2324 | Relay 36 | 0.5069 | 0.5069 |
| Relay 17 | 0.1778 | 0.1778 | Relay 37 | 0.3035 | 0.6070 |
| Relay 18 | 0.3106 | 0.3106 | Relay 38 | 0.2097 | 0.2097 |
| Relay 19 | 0.3849 | 0.3849 | Relay 39 | 0.2748 | 0.2748 |
| Relay 20 | 0.2652 | 0.2652 | Relay 40 | 0.2861 | 0.8205 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Habib, K.; Lai, X.; Wadood, A.; Khan, S.; Wang, Y.; Xu, S. An Improved Technique of Hybridization of PSO for the Optimal Coordination of Directional Overcurrent Protection Relays of IEEE Bus System. Energies 2022, 15, 3076. https://doi.org/10.3390/en15093076
Habib K, Lai X, Wadood A, Khan S, Wang Y, Xu S. An Improved Technique of Hybridization of PSO for the Optimal Coordination of Directional Overcurrent Protection Relays of IEEE Bus System. Energies. 2022; 15(9):3076. https://doi.org/10.3390/en15093076
Chicago/Turabian StyleHabib, Kashif, Xinquan Lai, Abdul Wadood, Shahbaz Khan, Yuheng Wang, and Siting Xu. 2022. "An Improved Technique of Hybridization of PSO for the Optimal Coordination of Directional Overcurrent Protection Relays of IEEE Bus System" Energies 15, no. 9: 3076. https://doi.org/10.3390/en15093076
APA StyleHabib, K., Lai, X., Wadood, A., Khan, S., Wang, Y., & Xu, S. (2022). An Improved Technique of Hybridization of PSO for the Optimal Coordination of Directional Overcurrent Protection Relays of IEEE Bus System. Energies, 15(9), 3076. https://doi.org/10.3390/en15093076