
Optimal Allocation of Directional Relay for Efficient Energy Optimization in a Radial Distribution System

 ,
,  ,
,  ,
, 

Abstract
:1. Introduction
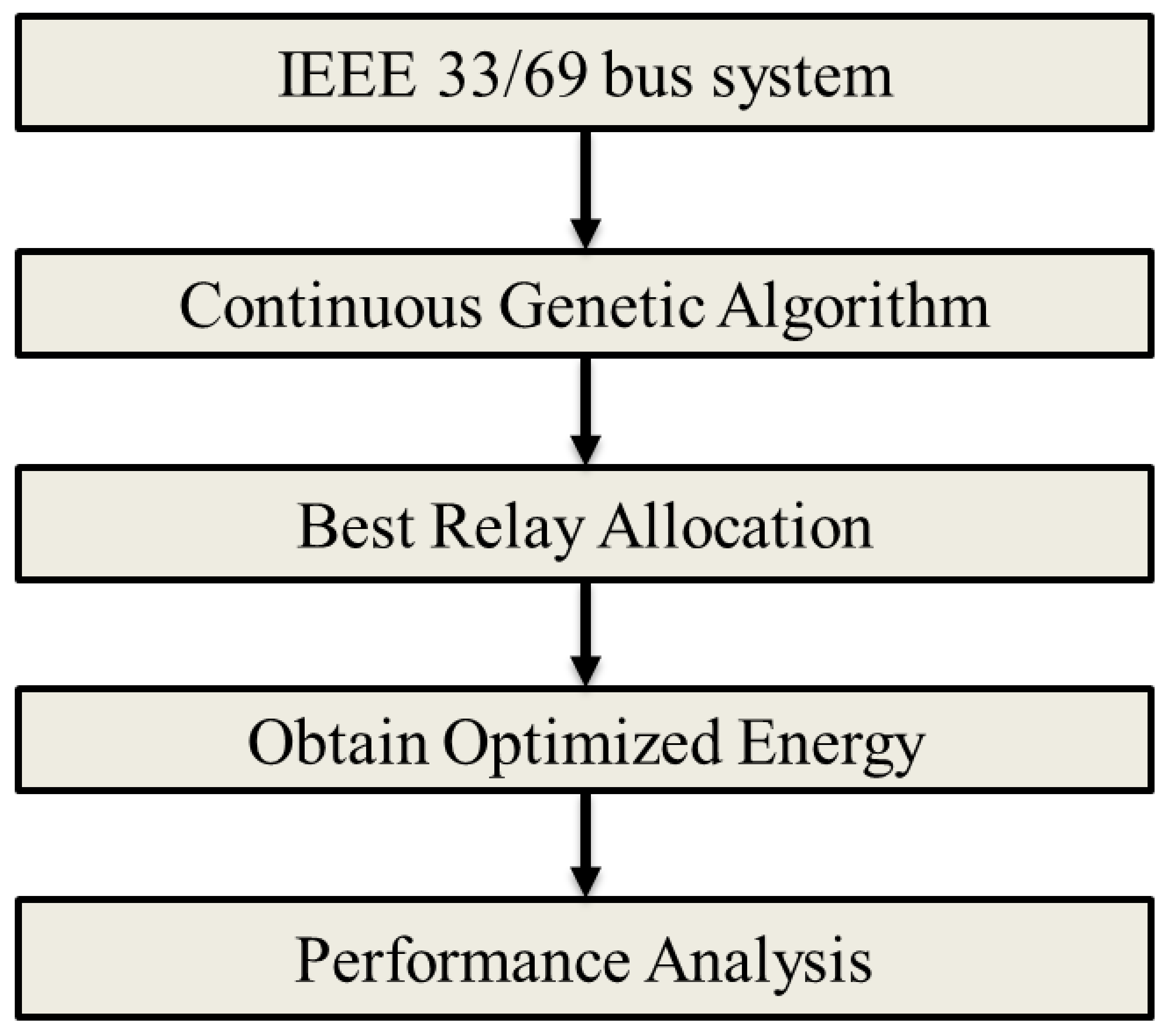
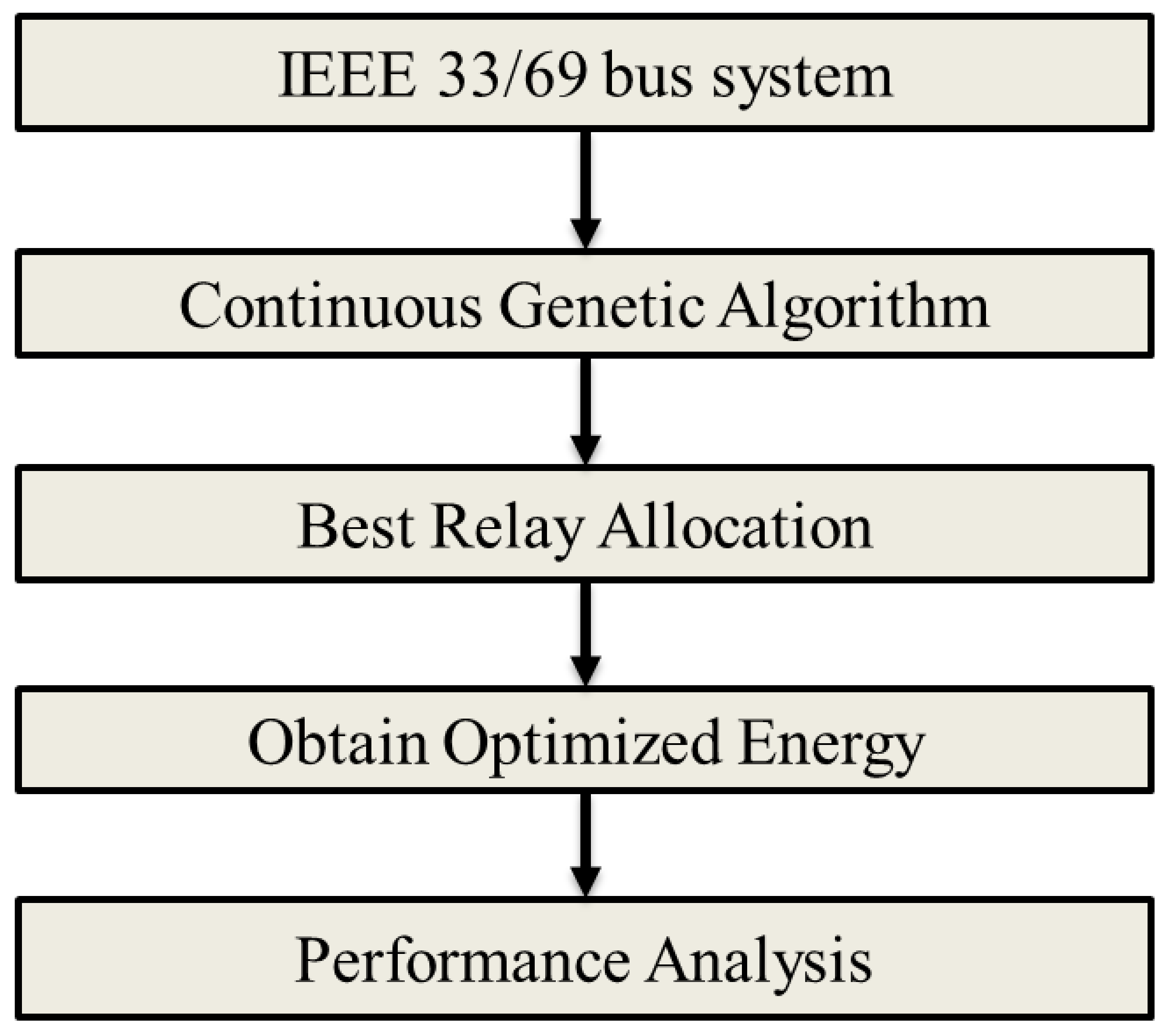
2. Materials and Methods
2.1. Mathematical Problem Formulation
2.1.1. Optimization Constraints
2.1.2. Objective Function
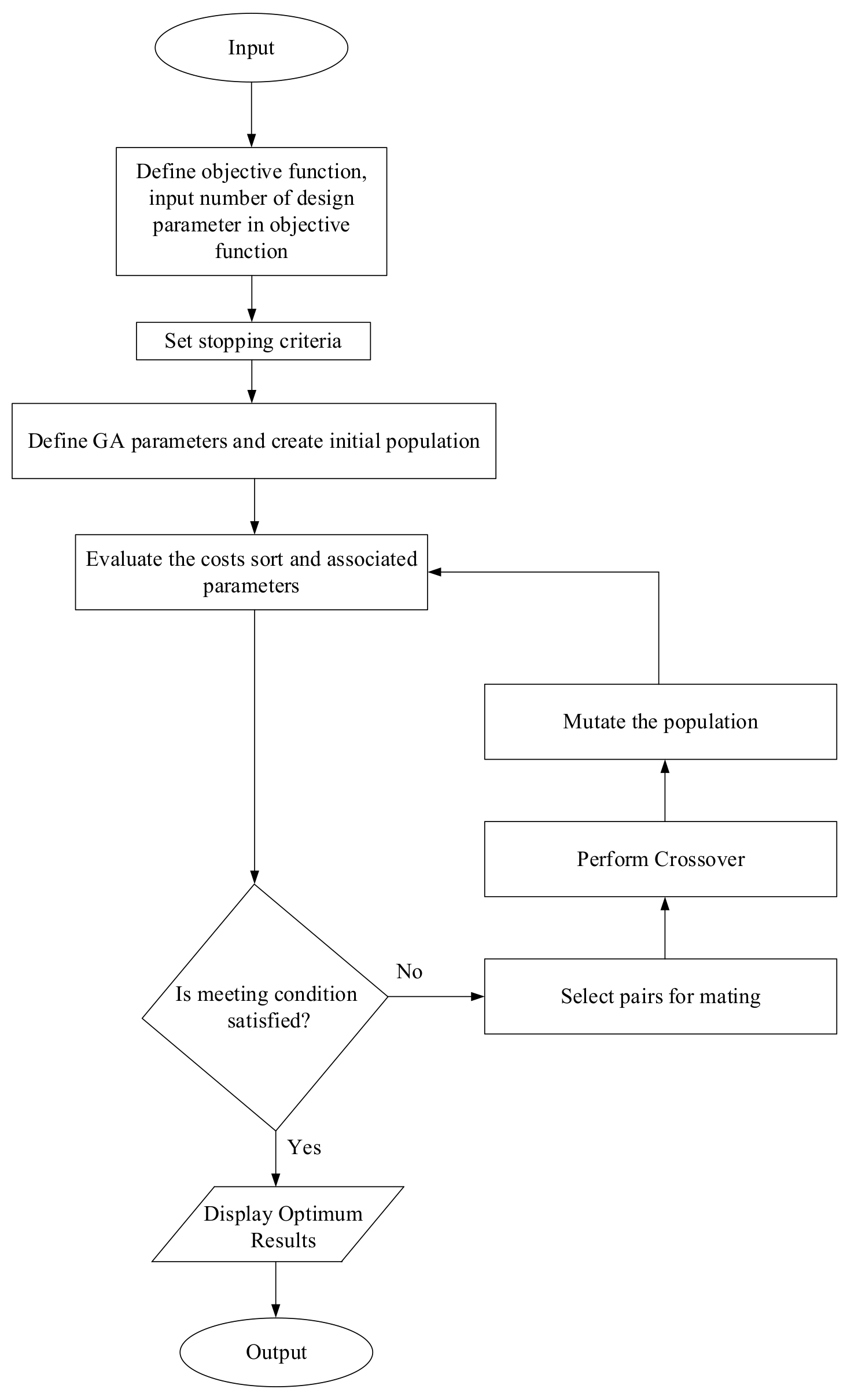
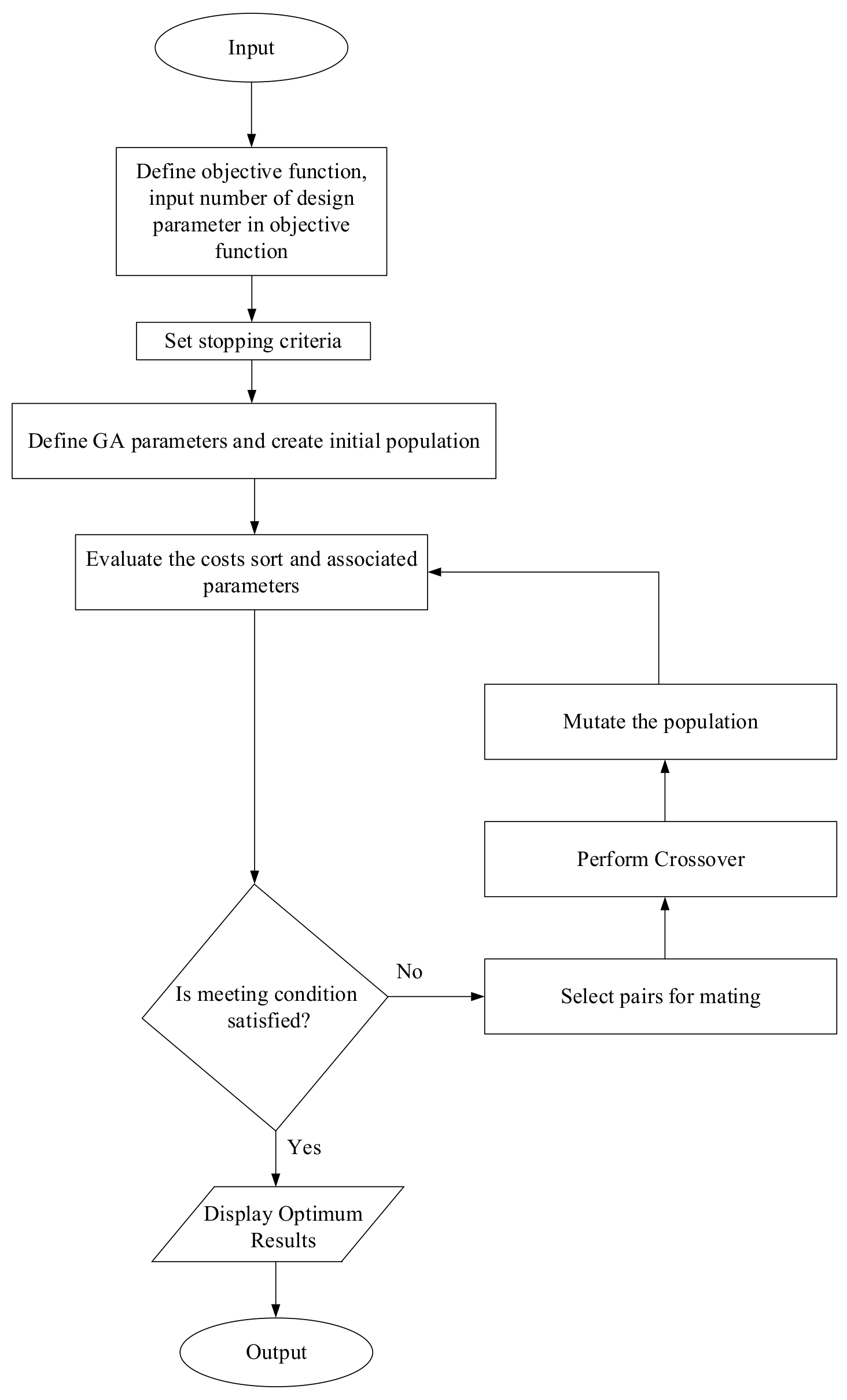
2.2. Continuous Genetic Algorithm
- In CGA optimization, the variables are denoted by floating point numbers that allow demonstration of the machine accuracy, while binary GA has its accuracy restricted by the binary illustration of variables.
- The other positive aspect of CGA is that it requires less storage than binary GA in light of the fact that a single floating point number illustrate the variable.
- The CGA is fundamentally faster than binary GA, in light of the fact that the chromosomes are not decoded.
3. Implementation of CGA
- Selection;
- Crossover;
- Mutation.
- 1.
- Selection
- 2.
- Crossover
- 3.
- Mutation
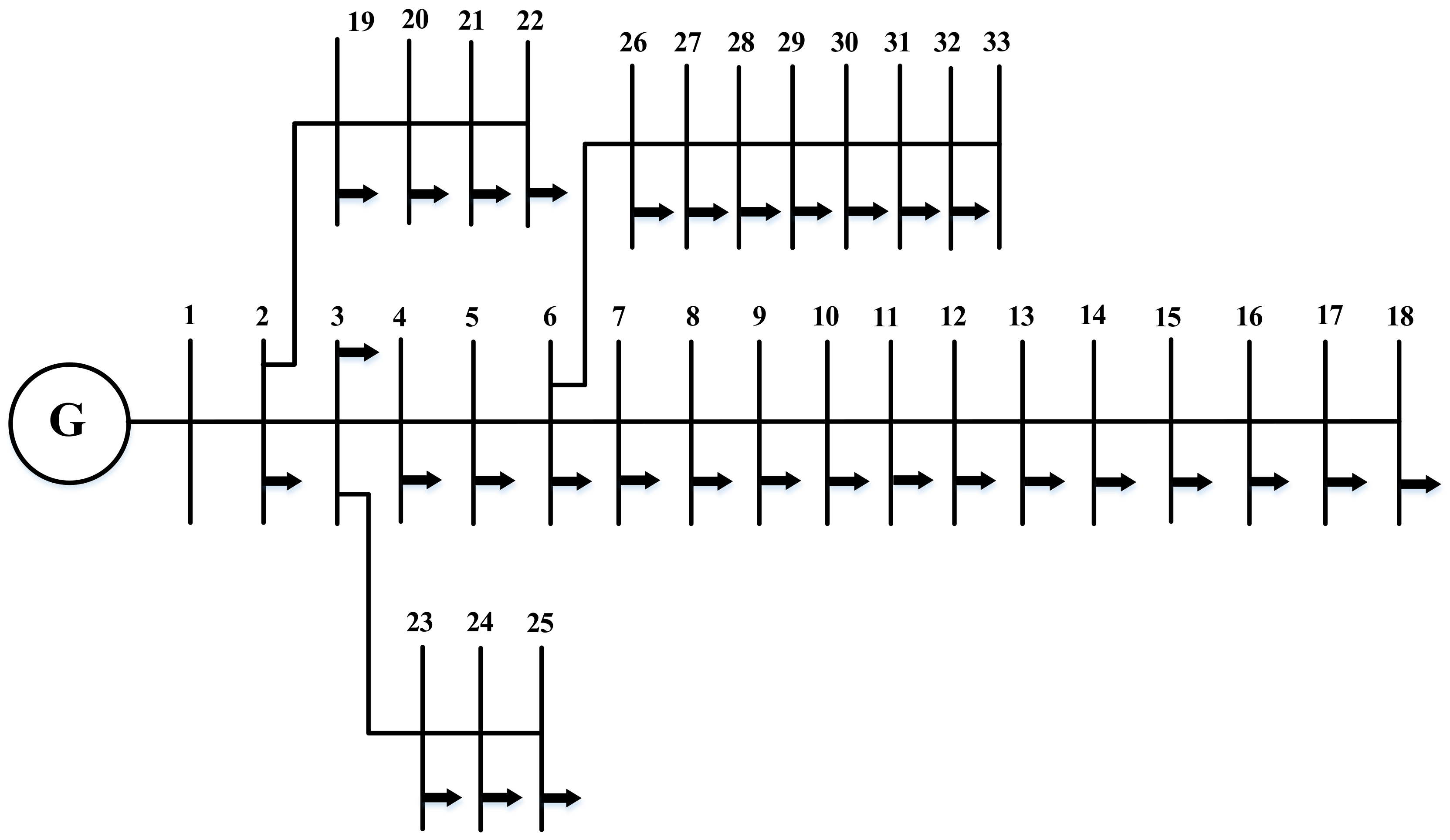
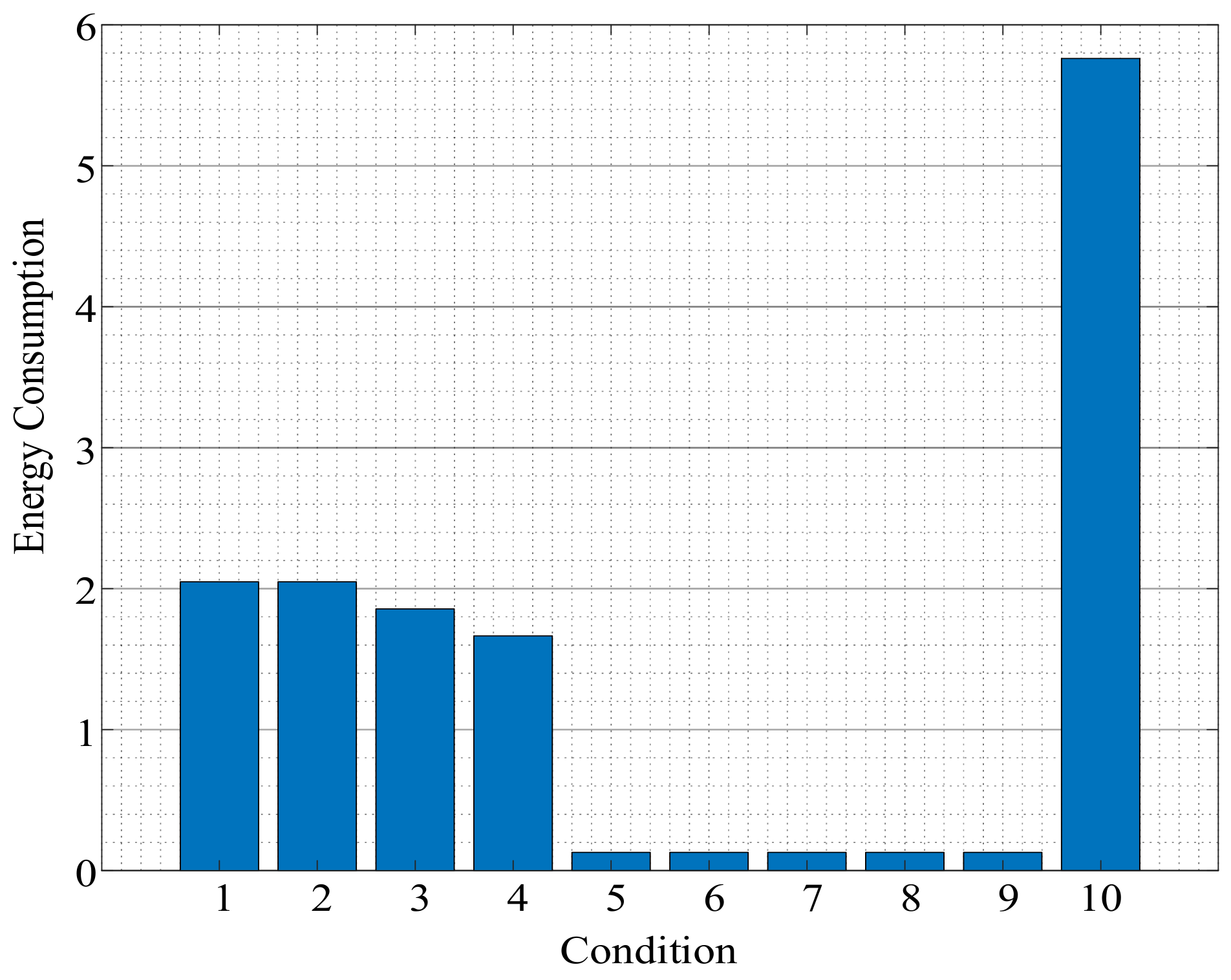
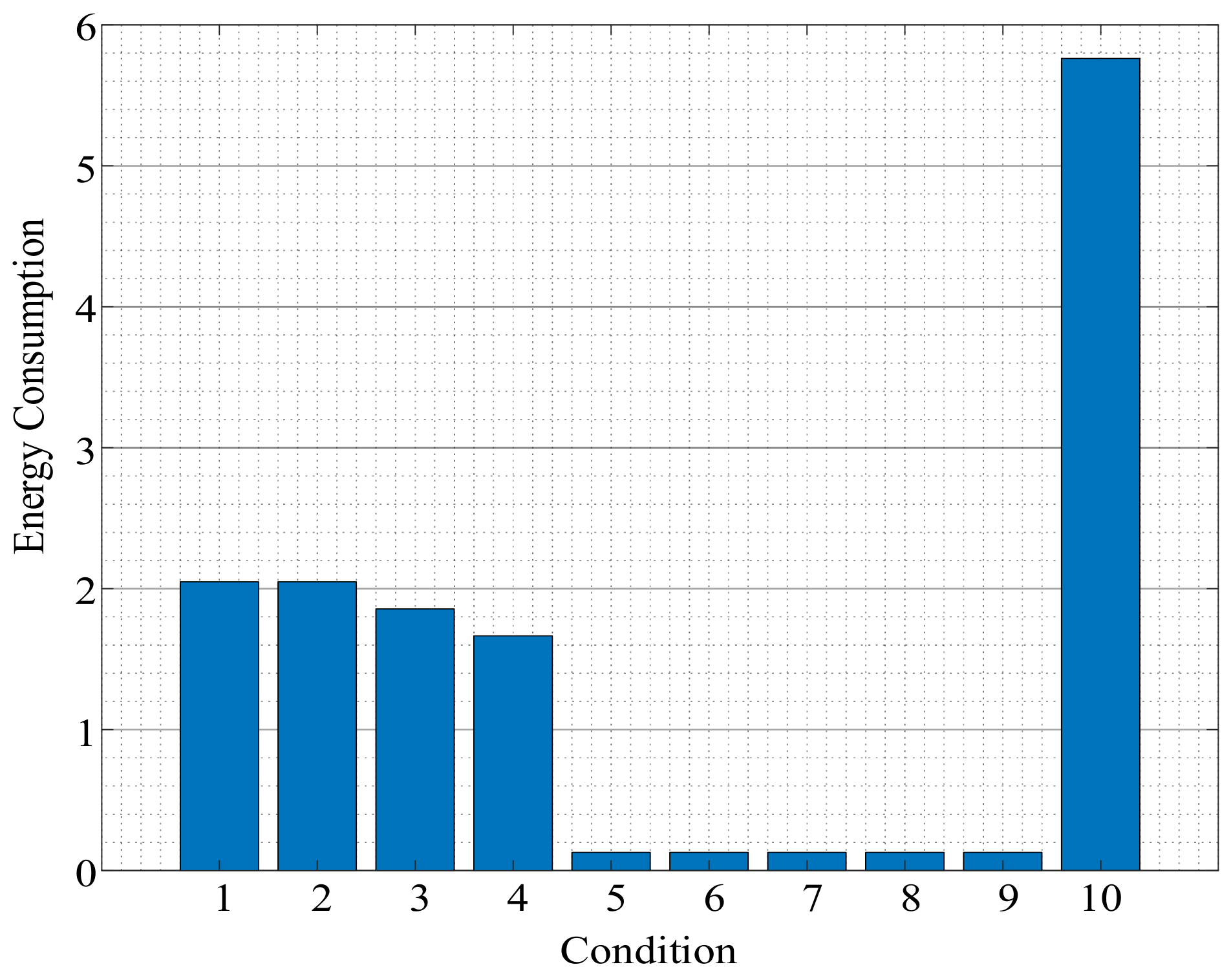
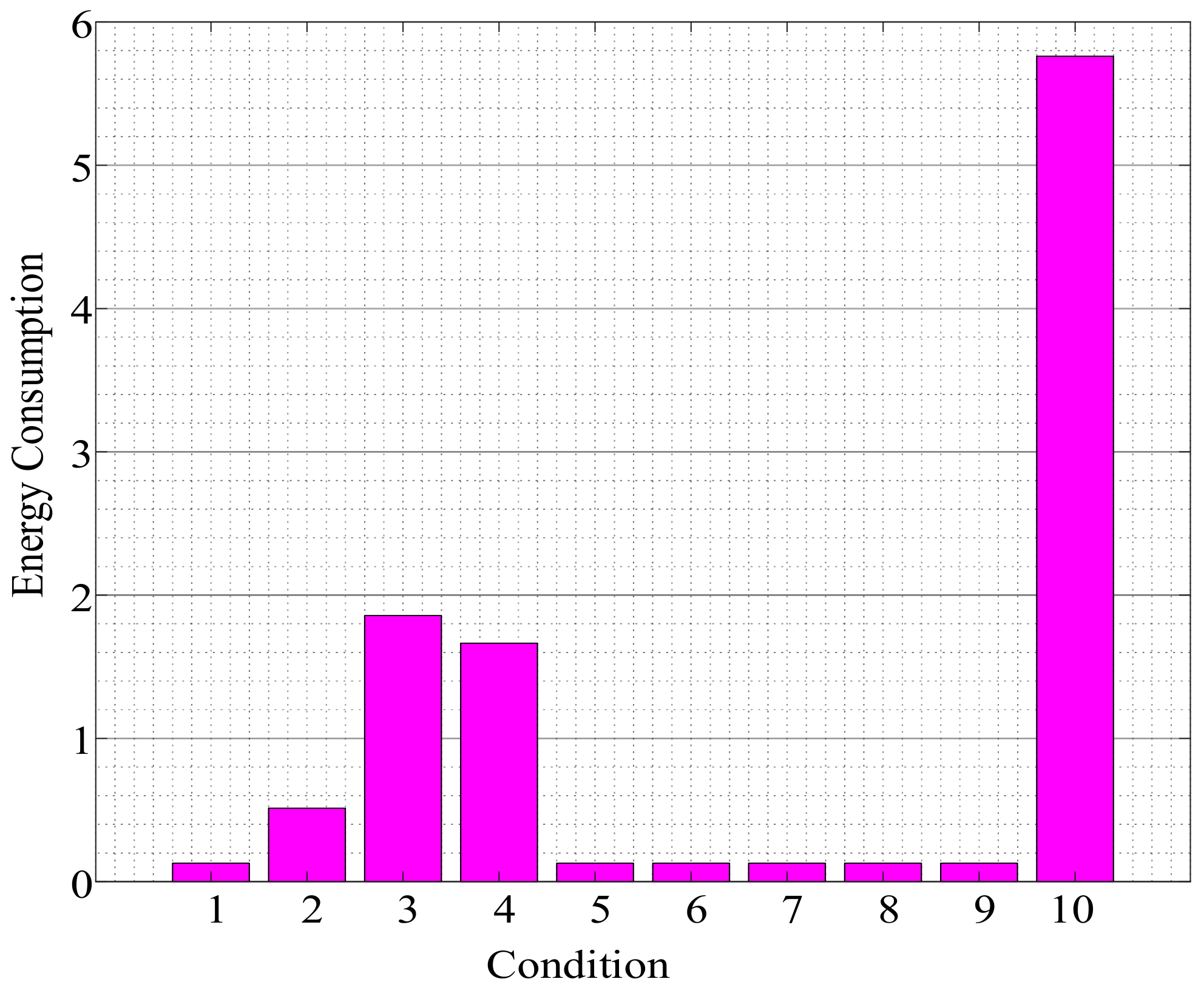
4. Result and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Billinton, R.; Allan, R.N. Reliability Evaluation of Power Systems; Pitman Books: New York, NY, USA; Pitman Books: London, UK, 1994. [Google Scholar]
- Da Silva, L.G.; Pereira, R.A.; Mantovani, J.R.S. Allocation of protective devices in distribution circuits using nonlinear programming models and genetic algorithms. Electr. Power Syst. Res. 2004, 69, 77–84. [Google Scholar] [CrossRef]
- Teng, J.-H.; Lu, C.-N. Value-based distribution feeder automation planning. Electr. Power Syst. Res. 2006, 28, 186–194. [Google Scholar] [CrossRef]
- Sohn, J.-M.; Nam, S.-R.; Park, J.-K. Value-Based Radial Distribution System Reliability Optimization. IEEE Trans. Power Syst. 2006, 21, 941–947. [Google Scholar] [CrossRef]
- Da Silva, L.G.W.; Pereira, R.A.F.; Abbad, J.R.; Mantovani, J.R.S. Optimised placement of control and protective devices in electric distribution systems through reactive tabu search algorithm. Electr. Power Syst. Res. 2007, 78, 372–381. [Google Scholar] [CrossRef]
- Teng, J.-H.; Lu, C.-N. Feeder-switch relocation for customer interruption cost minimization. IEEE Trans. Power Deliv. 2002, 17, 254–259. [Google Scholar] [CrossRef]
- Moradi, A.; Firuzabad, M.F. Optimal switch placement in distribution systems using trinary particle swarm optimization algorithm. IEEE Trans. Power Deliv. 2008, 23, 271–279. [Google Scholar] [CrossRef]
- Popovic, D.S.; Glamocic, L.R.; Nimrihter, M.D. The optimal automation level of medium voltage distribution networks. Int. J. Electr. Power Energy Syst. 2011, 33, 430–4385. [Google Scholar] [CrossRef]
- Rosado, I.J.R.; Agustín, J.L.B. Reliability and costs optimization for distribution networks expansion using an evolutionary algorithm. IEEE Trans. Power Syst. 2001, 16, 111–118. [Google Scholar] [CrossRef]
- Rosado, I.J.R.; Navarro, J.A.D. New multiobjective tabu search algorithm for fuzzy optimal planning of power distribution systems. IEEE Trans. Power Syst. 2006, 21, 224–233. [Google Scholar] [CrossRef]
- Ramirez-Rosado, I.; Dominguez-Navarro, J. Possibilistic Model Based on Fuzzy Sets for the Multiobjective Optimal Planning of Electric Power Distribution Networks. IEEE Trans. Power Syst. 2004, 19, 1801–1810. [Google Scholar] [CrossRef]
- Stojanović, M.S.; Tasić, D.S.; Ristić, A.T. Optimal Allocation of Distribution Automation Devices in Medium Voltage Network. Electron. Electr. Eng. 2013, 19, 9–14. [Google Scholar] [CrossRef] [Green Version]
- Popovic, Z.; Knezevic, S.; Brbaklic, B.; Zeljko, P. Optimal number, type and location of remotely controlled and supervised devices in distribution networks. In Proceedings of the 2015 IEEE Eindhoven PowerTech, Eindhoven, The Netherlands, 29 June–2 July 2015; pp. 1–6. [Google Scholar]
- Popovic, Z.; Knezevic, S.; Brbaklic, B. Optimal number, type and location of automation devices in distribution networks with distributed generation. In Proceedings of the CIRED Workshop 2016, Helsinki, Finland, 14–15 June 2016. [Google Scholar]
- Heidari, A.; Agelidis, V.G.; Kia, M.; Pou, J.; Aghaei, J.; Shafie-Khah, M.; Catalão, J.P.S. Reliability Optimization of Automated Distribution Networks with Probability Customer Interruption Cost Model in the Presence of DG Units. IEEE Trans. Smart Grid 2017, 8, 305–315. [Google Scholar] [CrossRef]
- Falaghi, H.; Haghifam, M.-R.; Singh, C. Ant Colony Optimization-Based Method for Placement of Sectionalizing Switches in Distribution Networks Using a Fuzzy Multiobjective Approach. IEEE Trans. Power Deliv. 2009, 24, 268–276. [Google Scholar] [CrossRef]
- Pregelj, A.; Begovic, M.; Rohatgi, A. Recloser allocation for improved reliability of DG-enhanced distribution networks. IEEE Trans. Power Syst. 2006, 21, 1442–1449. [Google Scholar] [CrossRef]
- Wang, L.; Singh, C. Reliability-Constrained Optimum Placement of Reclosers and Distributed Generators in Distribution Networks Using an Ant Colony System Algorithm. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2008, 38, 757–764. [Google Scholar] [CrossRef]
- Abiri-Jahromi, A.; Fotuhi-Firuzabad, M.; Parvania, M.; Mosleh, M. Optimized Sectionalizing Switch Placement Strategy in Distribution Systems. IEEE Trans. Power Syst. 2011, 27, 362–370. [Google Scholar] [CrossRef]
- Lim, I.; Sidhu, T.S.; Choi, M.S.; Lee, S.J.; Ha, B.N. An Optimal Composition and Placement of Automatic Switches in DAS. IEEE Trans. Power Deliv. 2013, 28, 1474–1482. [Google Scholar] [CrossRef]
- Shahsavari, A.; Mazhari, S.M.; Fereidunian, A.; Lesani, H. Fault Indicator Deployment in Distribution Systems Considering Available Control and Protection Devices: A Multi-Objective Formulation Approach. IEEE Trans. Power Syst. 2014, 29, 2359–2369. [Google Scholar] [CrossRef]
- Swarnkar, A.; Gupta, N.; Niazi, K.R. Efficient reconfiguration of distribution systems using ant colony optimization adapted by graph theory. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–8. [Google Scholar] [CrossRef]
- Bedekar, P.P.; Bhide, S.R. Optimum coordination of overcurrent relay timing using continuous genetic algorithm. Expert Syst. Appl. 2011, 38, 11286–11292. [Google Scholar] [CrossRef]
- Hairi, M.H.; Alias, K.; Aras, M.M.; Basar, M.M.; Fah, S.P. Inverse definite minimum time overcurrent relay coordination using Computer Aided Protection Engineering. In Proceedings of the 2010 4th International Power Engineering and Optimization Conference (PEOCO), Shah Alam, Malaysia, 23–24 June 2010; pp. 304–307. [Google Scholar] [CrossRef]
- Wadood, A.; Kim, C.-H.; Khurshiad, T.; Farkoush, S.G.; Rhee, S.-B. Application of a Continuous Particle Swarm Optimization (CPSO) for the Optimal Coordination of Overcurrent Relays Considering a Penalty Method. Energies 2018, 11, 869. [Google Scholar] [CrossRef] [Green Version]
- Singh, D.K.; Gupta, S. Optimal coordination of directional overcurrent relays: A genetic algorithm approach. In Proceedings of the 2012 IEEE Students’ Conference on Electrical, Electronics and Computer Science, Bhopal, India, 1–2 March 2012; pp. 1–4. [Google Scholar]
- Khurshaid, T.; Wadood, A.; Farkoush, S.G.; Kim, C.-H.; Cho, N.; Rhee, S.-B. Modified Particle Swarm Optimizer as Optimization of Time Dial Settings for Coordination of Directional Overcurrent Relay. J. Electr. Eng. Technol. 2019, 14, 55–68. [Google Scholar] [CrossRef]
- Thillainathan, L.; Srinivasan, D.; Shun, T.Z. Demand side management in smart grid using heuristic optimization. IEEE Trans. Smart Grid 2012, 3, 1244–1252. [Google Scholar]
- Huang, H.-T.; Chen, C.-L. Emerging organizational structure for knowledge-oriented teamwork using genetic algorithm. Expert Syst. Appl. 2009, 36, 12137–12142. [Google Scholar] [CrossRef]
- Sasikala, J.; Ramaswamy, M. Optimal gamma based fixed head hydrothermal scheduling using genetic algorithm. Expert Syst. Appl. 2010, 37, 3352–3357. [Google Scholar] [CrossRef]
- Goldberg, D.E.; Holland, J.H. Genetic Algorithms and Machine Learning. Mach. Learn. 1988, 3, 95–99. [Google Scholar] [CrossRef]
- Haupt, R.L.; Haupt, S.E. Practical Genetic Algorithms, 2nd ed.; John Wiley and Sons, Inc.: Hoboken, NJ, USA, 2004. [Google Scholar]
- Irfan, M.; Wadood, A.; Khurshaid, T.; Khan, B.M.; Kim, K.C.; Oh, S.R.; Rhee, S.B. An optimized adaptive protection scheme for numerical and directional overcurrent relay coordination using Harris hawk optimization. Energies 2021, 14, 5603. [Google Scholar] [CrossRef]
- Chiang, H.-D.; Jean-Jumeau, R. Optimal network reconfigurations in distribution systems. II. Solution algorithms and numerical results. IEEE Trans. Power Deliv. 1990, 5, 1568–1574. [Google Scholar] [CrossRef]
- University of Washington. Power Systems Test Case Archive. Available online: https://www.ee.washington.edu/research/pstca (accessed on 25 June 2019).
- Vita, V. Development of a Decision-Making Algorithm for the Optimum Size and Placement of Distributed Generation Units in Distribution Networks. Energies 2017, 10, 1433. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Arrangement | Number of Lines on Which Relays Are Installed | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Line Condition 1 | 3 | 6 | 8 | 18 | 20 | 21 | 22 | 23 | 24 | 25 | 30 | |
| Line Condition 2 | 3 | 7 | 11 | 18 | 20 | 21 | 22 | 23 | 24 | 25 | 30 | |
| Line Condition 3 | 3 | 6 | 11 | 18 | 20 | 21 | 22 | 23 | 24 | 27 | 31 | |
| Line Condition 4 | 5 | 6 | 8 | 18 | 20 | 21 | 22 | 23 | 24 | 25 | 30 | |
| Line Condition 5 | 7 | 11 | 14 | 18 | 20 | 21 | 22 | 23 | 24 | 25 | 28 | 31 |
| 5 | 6 | 18 | 20 | 21 | 22 | 23 | 24 | 25 | 28 | 30 |
| Condition | ||||||||
|---|---|---|---|---|---|---|---|---|
| Number of lines on which relays are installed | A | B | C | D | E | F | G | H |
| 5 | 10 | 10 | 5 | 5 | 5 | 5 | 5 | |
| 10 | 14 | 13 | 10 | 10 | 10 | 10 | 10 | |
| 13 | 22 | 22 | 17 | 15 | 13 | 13 | 17 | |
| 28 | 28 | 28 | 28 | 28 | 28 | 28 | 28 | |
| 30 | 30 | 30 | 30 | 30 | 30 | 29 | 30 | |
| 35 | 34 | 34 | 35 | 35 | 35 | 30 | 36 | |
| 36 | 36 | 36 | 36 | 36 | 36 | 36 | 41 | |
| 38 | 38 | 38 | 38 | 38 | 38 | 38 | 47 | |
| 41 | 41 | 41 | 41 | 41 | 41 | 41 | 50 | |
| 47 | 47 | 47 | 47 | 47 | 47 | 47 | 51 | |
| 49 | 49 | 49 | 49 | 49 | 49 | 49 | 52 | |
| 50 | 50 | 50 | 50 | 50 | 50 | 50 | 59 | |
| 51 | 51 | 51 | 51 | 51 | 51 | 51 | 63 | |
| 52 | 52 | 52 | 52 | 52 | 52 | 52 | 66 | |
| 53 | 53 | 53 | 53 | 53 | 53 | 53 | 68 | |
| 62 | 56 | 56 | 62 | 62 | 62 | 62 | ||
| 66 | 62 | 62 | 66 | 66 | 66 | 66 | ||
| 68 | 66 | 66 | 68 | 68 | 68 | 68 | ||
| 67 | 67 | |||||||
| 68 | 68 | |||||||
| 69 | 69 | |||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khurshaid, T.; Wadood, A.; Frakoush, S.G.; Kim, T.-H.; Kim, K.-C.; Rhee, S.-B. Optimal Allocation of Directional Relay for Efficient Energy Optimization in a Radial Distribution System. Energies 2022, 15, 4709. https://doi.org/10.3390/en15134709
Khurshaid T, Wadood A, Frakoush SG, Kim T-H, Kim K-C, Rhee S-B. Optimal Allocation of Directional Relay for Efficient Energy Optimization in a Radial Distribution System. Energies. 2022; 15(13):4709. https://doi.org/10.3390/en15134709
Chicago/Turabian StyleKhurshaid, Tahir, Abdul Wadood, Saeid Gholami Frakoush, Tae-Hwan Kim, Ki-Chai Kim, and Sang-Bong Rhee. 2022. "Optimal Allocation of Directional Relay for Efficient Energy Optimization in a Radial Distribution System" Energies 15, no. 13: 4709. https://doi.org/10.3390/en15134709
APA StyleKhurshaid, T., Wadood, A., Frakoush, S. G., Kim, T.-H., Kim, K.-C., & Rhee, S.-B. (2022). Optimal Allocation of Directional Relay for Efficient Energy Optimization in a Radial Distribution System. Energies, 15(13), 4709. https://doi.org/10.3390/en15134709