
Optimal Scheduling of Energy Storage System Considering Life-Cycle Degradation Cost Using Reinforcement Learning



Abstract
:1. Introduction
- (1)
- By defining the life-cycle cost of an ESS, and deriving and utilizing it for optimal scheduling, prosumers with ESSs can make the best choice between incurring life-cycle costs due to ESS use and profiting from transactions. In addition, because of the active adjustment of prosumers with ESSs, it is possible to reduce the line loss inside a system.
- (2)
- Through analysis of the trading tendency of flexible prosumers with respect to changes in ESS life-cycle cost weights, prosumers who own an ESS have the choice of participating in P2P energy trading to make profits.
2. Life Degradation Model for ESSs Based on a Life-Cycle Assessment Method
2.1. Temperature Stress Model Formulation
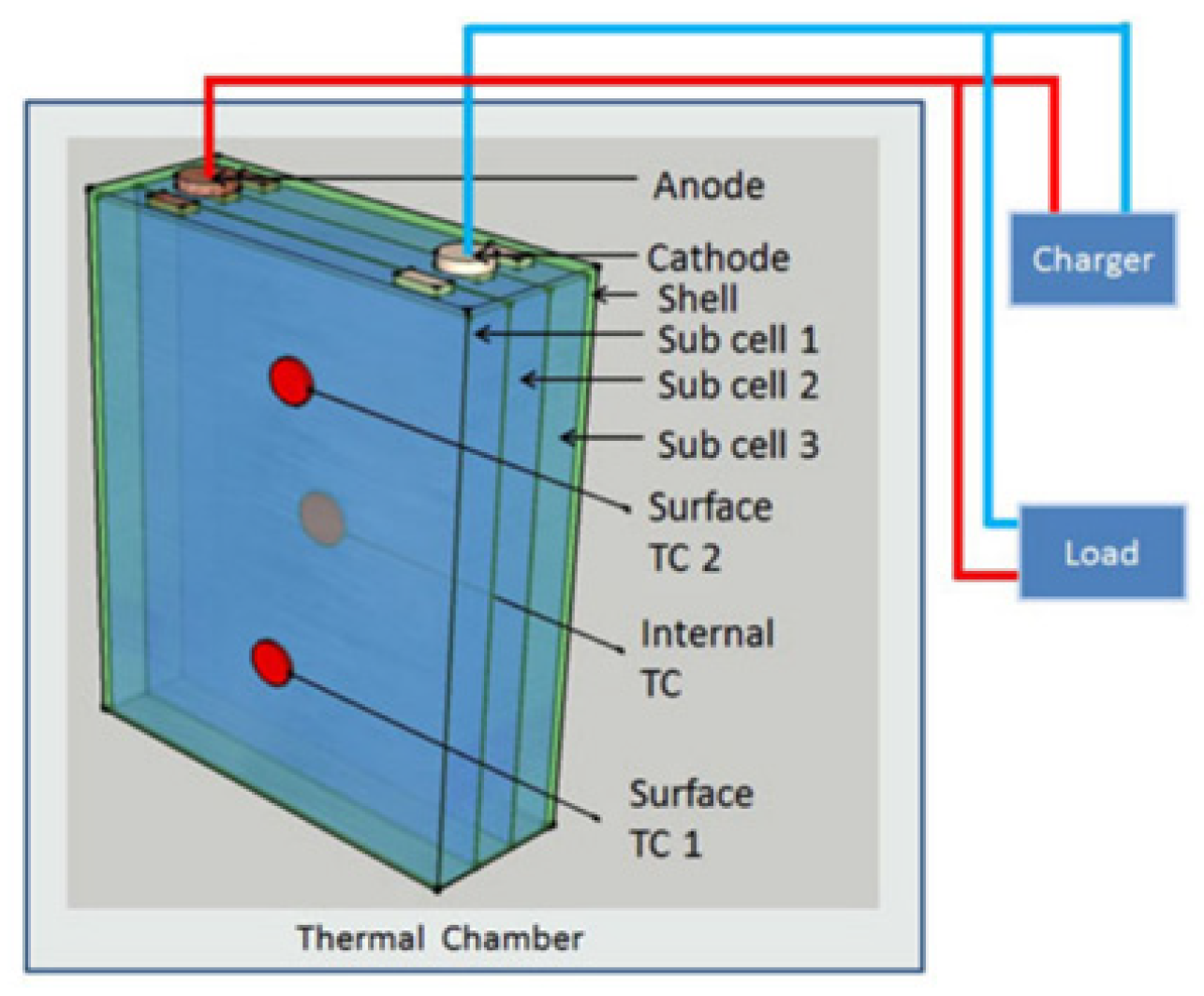
2.1.1. Electric Circuit Model
2.1.2. Lumped Thermal Model
2.1.3. Coupled Thermoelectric Model
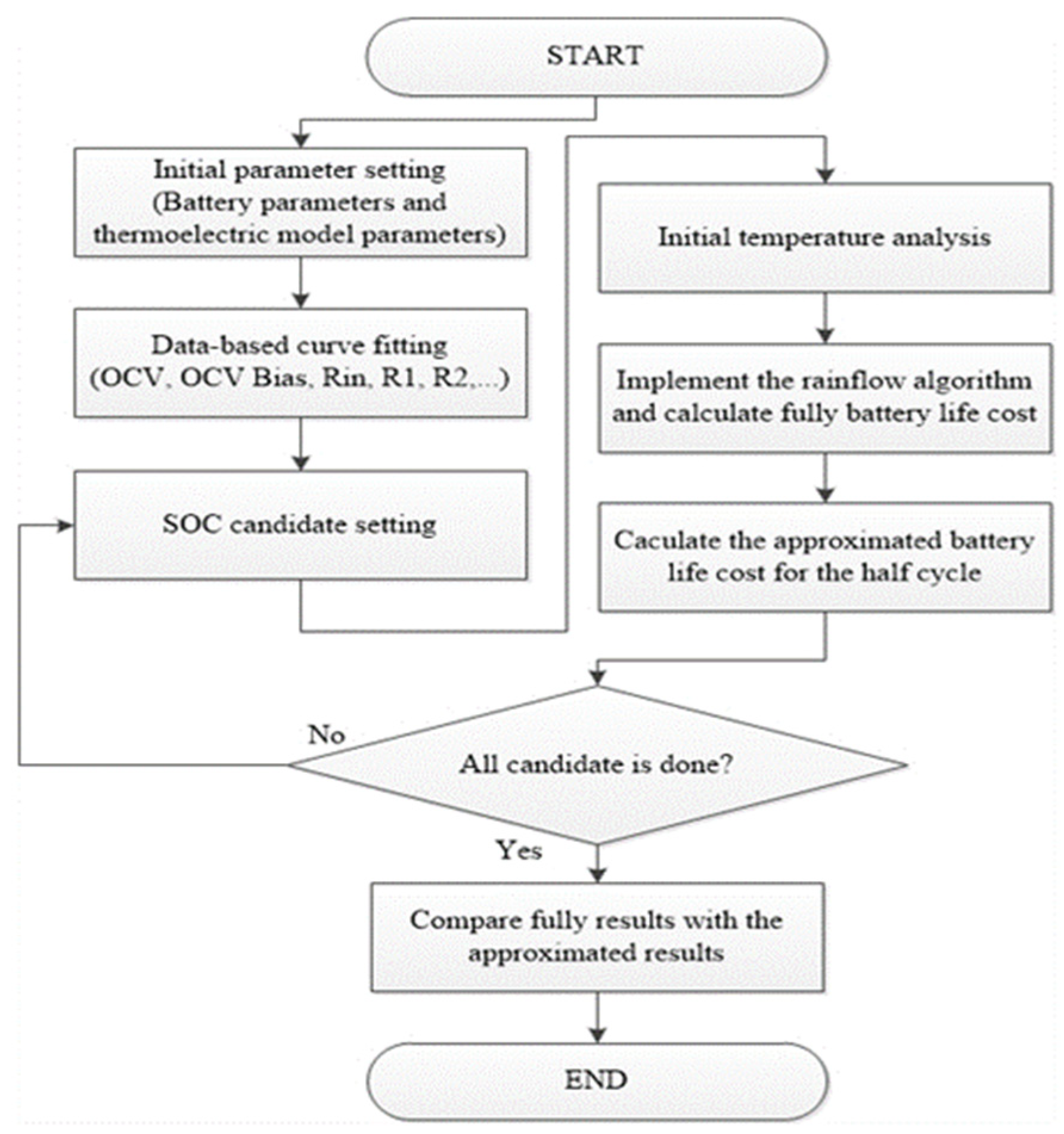
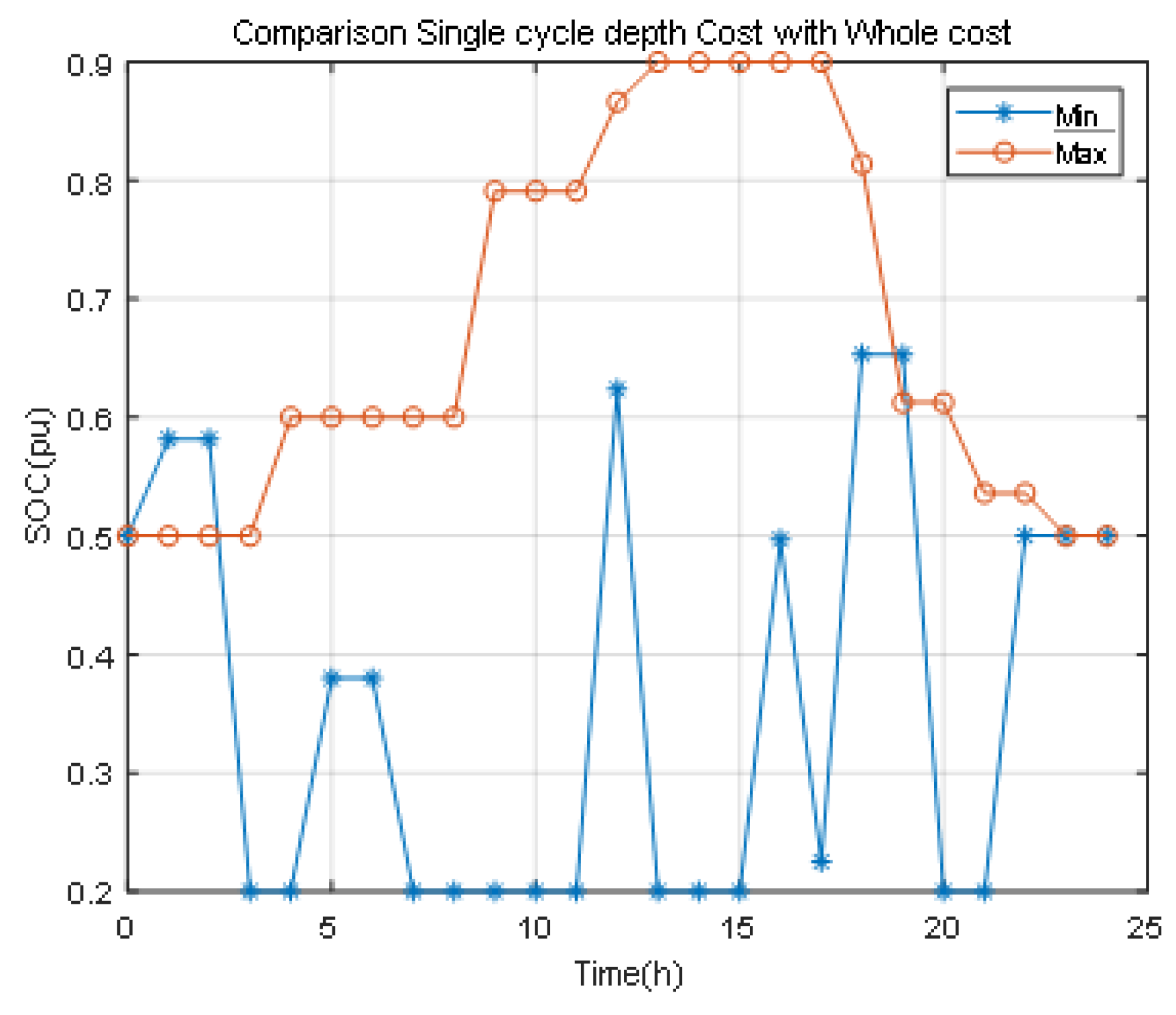
2.2. Cycle Depth Stress Model Formulation
2.3. ESS Life-Cycle Cost Formulation
3. ESS Scheduling Formulation Considering the Life-Cycle Cost
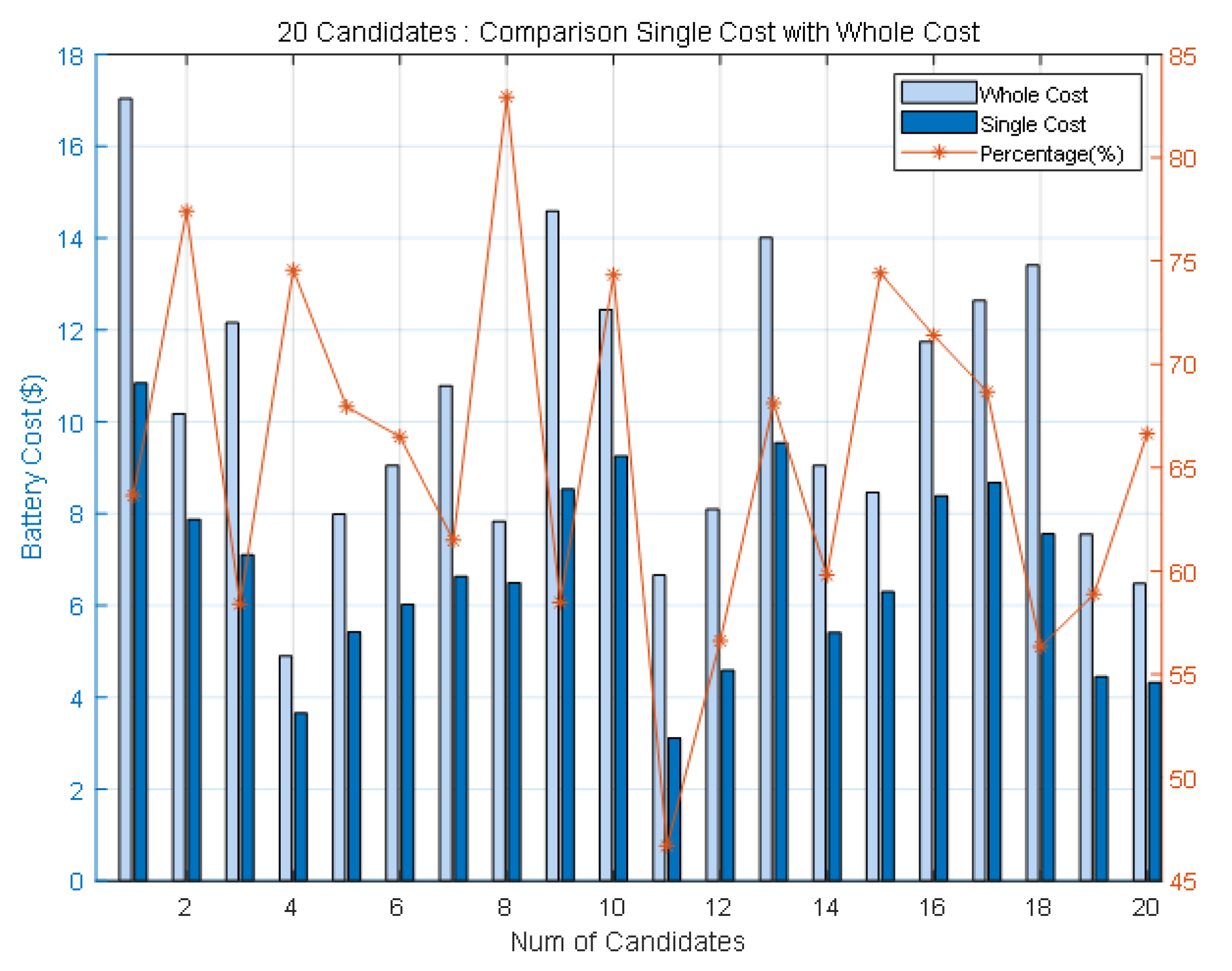
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Nomenclature
| The degradation ratio | |
| The stresses for temperature, average SOC, and DOD | |
| The battery cell temperature | |
| The reference temperature | |
| The temperature stress coefficient | |
| The average SOC | |
| The reference average SOC | |
| The average SOC stress coefficient | |
| The stress for time | |
| The cycle depth | |
| The DOD coefficients | |
| Time | |
| The time stress coefficient | |
| The consumed life-cycle | |
| The solid electrolyte interphase (SEI) film formation coefficients | |
| The sampling time (unit: second [s]) | |
| The battery capacity (unit: Ampere hour [Ah]) | |
| The output currents | |
| Time index | |
| The battery internal temperature | |
| The battery shell temperature | |
| The ambient temperature | |
| The internal and shell thermal capacities of the battery | |
| The heat conduction coefficients | |
| The output of the ESS | |
| The capacity of the ESS | |
| The ESS charging/discharging efficiency | |
| The SOC at time t | |
| The life-cycle cost | |
| The investment cost for the battery | |
| The value of state | |
| The value of action a in state s | |
| The policy of action in state | |
| The reward of action in state | |
| The probability of transition from state to state by action | |
| The discount factors | |
| The learning rates |
References
- Jeonghwa, G. Issue Study Report Changes in the Global Power Generation Industry Paradigm and Implications; Korea Eximbank: Seoul, Korea, 2019; Volume 2018-04, pp. 1–51.
- Knowledge Industry Information Institute. Distributed Power New Technology Development Trend and Small Power Brokerage Market Promotion Status; Knowledge Industry Information Institute: Seoul, Korea, 2020; pp. 505–593. [Google Scholar]
- Hernandez, J.; Etemadi, A. Use of Multiple Linear Regression Techniques to Predict Energy Storage Systems’ Total Capital Costs and Life Cycle Costs. In Proceedings of the 2020 IEEE PES/IAS PowerAfrica, Nairobi, Kenya, 25–28 August 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–5. [Google Scholar]
- Bonanno, G.; De Caro, S.; Sciammetta, A.; Scimone, T.; Testa, A. An Analytic Approach to Pay-Back Time Assessment of Grid-Connected PV Plants with ESS. In Proceedings of the 2015 Second International Conference on Mathematics and Computers in Sciences and in Industry (MCSI), Sliema, Malta, 17 August 2015; pp. 1–6. [Google Scholar]
- Torkashvand, M.; Khodadadi, A.; Sanjareh, M.B.; Nazary, M.H. A Life Cycle-Cost Analysis of Li-ion and Lead-Acid BESSs and Their Actively Hybridized ESSs with Supercapacitors for Islanded Microgrid Applications. IEEE Access 2020, 8, 153215–153225. [Google Scholar] [CrossRef]
- Yan, N.; Li, X.; Ma, S.; Zhao, H.; Zhang, B. Research on capacity configuration method of energy storage system for echelon utilization based on accelerated life test in microgrids. CSEE J. Power Energy Syst. 2020, 1–11. [Google Scholar] [CrossRef]
- Jiao, J.; Du, Y.; Yang, J.; Tian, Y.; Hu, L.; Wang, Q. Cost Management Evaluation of Power Grid Engineering: A Life Cycle Theory. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies—Asia (ISGT Asia), Chengdu, China, 21–24 May 2019; pp. 2499–2504. [Google Scholar]
- Zhang, H.; Xue, S.; Li, X.; Li, R.; Zhang, X.; Ma, L. Evaluation Model for Life-Cycle Management Capability of Power Grid Corporation’s Distribution Equipment Assets. In Proceedings of the 2020 5th Asia Conference on Power and Electrical Engineering (ACPEE), Chengdu, China, 4–7 June 2020; pp. 1961–1965. [Google Scholar]
- Liu, J.; Zou, D. Study on the P2P Sharing Mode Operating Scheme of Consumer-side Distributed Energy Storage. In Proceedings of the 2019 IEEE 3rd Conference on Energy Internet and Energy System Integration (EI2), Changsha, China, 8–10 November 2019; Volume EI2, pp. 2097–2102. [Google Scholar]
- Jamahori, H.F.; Rahman, H.A. Hybrid energy storage system for life cycle improvement. In Proceedings of the 2017 IEEE Conference on Energy Conversion (CENCON), Kuala Lumpur, Malaysia, 30–31 October 2017; pp. 196–200. [Google Scholar]
- Motapon, S.N.; Lachance, E.; Dessaint, L.-A.; Al-Haddad, K. A Generic Cycle Life Model for Lithium-Ion Batteries Based on Fatigue Theory and Equivalent Cycle Counting. IEEE Open J. Ind. Electron. Soc. 2020, 1, 207–217. [Google Scholar] [CrossRef]
- Bouakkaz, A.; Gil Mena, A.J.; Haddad, S.; Ferrari, M.L. Scheduling of Energy Consumption in Stand-alone Energy Systems Considering the Battery Life Cycle. In Proceedings of the 2020 IEEE International Conference on Environment and Electrical Engineering and 2020 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Madrid, Spain, 9–12 June 2020; pp. 1–4. [Google Scholar]
- Yao, Z.; Lu, S.; Li, Y.; Yi, X. Cycle life prediction of lithium ion battery based on DE-BP neural network. In Proceedings of the 2019 International Conference on Sensing, Diagnostics, Prognostics, and Control (SDPC), Beijing, China, 15–17 August 2019; pp. 137–141. [Google Scholar]
- Shen, S.; Nemani, V.; Liu, J.; Hu, C.; Wang, Z. A Hybrid Machine Learning Model for Battery Cycle Life Prediction with Early Cycle Data. In Proceedings of the 2020 IEEE Transportation Electrification Conference & Expo (ITEC), Chicago, IL, USA, 23–26 June 2020; pp. 181–184. [Google Scholar]
- Zhang, Y.; Xu, Y.; Yang, H.; Dong, Z.Y.; Zhang, R. Optimal Whole-Life-Cycle Planning of Battery Energy Storage for Multi-Functional Services in Power Systems. IEEE Trans. Sustain. Energy 2019, 11, 2077–2086. [Google Scholar] [CrossRef]
- Valencia, A.; Hincapie, R.A.; Gallego, R.A. Optimal location, selection, and operation of battery energy storage systems and renewable distributed generation in medium–low voltage distribution networks. J. Energy Storage 2021, 34, 102158. [Google Scholar] [CrossRef]
- Lee, J.-O.; Kim, Y.-S. Novel battery degradation cost formulation for optimal scheduling of battery energy storage systems. Int. J. Electr. Power Energy Syst. 2021, 137, 107795. [Google Scholar] [CrossRef]
- Wu, Y.; Liu, Z.; Liu, J.; Xiao, H.; Liu, R.; Zhang, L. Optimal battery capacity of grid-connected PV-battery systems considering battery degradation. Renew. Energy 2021, 181, 10–23. [Google Scholar] [CrossRef]
- Gil-González, W.; Montoya, O.D.; Grisales-Noreña, L.F.; Escobar-Mejía, A. Optimal Economic–Environmental Operation of BESS in AC Distribution Systems: A Convex Multi-Objective Formulation. Computation 2021, 9, 137. [Google Scholar] [CrossRef]
- Hein, K.; Yan, X.; Wilson, G. Multi-Objective Optimal Scheduling of a Hybrid Ferry with Shore-to-Ship Power Supply Considering Energy Storage Degradation. Electronics 2020, 9, 849. [Google Scholar] [CrossRef]
- Montoya, O.D.; Gil-González, W.; Serra, F.M.; Hernández, J.C.; Molina-Cabrera, A. A Second-Order Cone Programming Reformulation of the Economic Dispatch Problem of BESS for Apparent Power Compensation in AC Distribution Networks. Electronics 2020, 9, 1677. [Google Scholar] [CrossRef]
- Molina-Martin, F.; Montoya, O.; Grisales-Noreña, L.; Hernández, J.; Ramírez-Vanegas, C. Simultaneous Minimization of Energy Losses and Greenhouse Gas Emissions in AC Distribution Networks Using BESS. Electronics 2021, 10, 1002. [Google Scholar] [CrossRef]
- Ullah, S.; Khan, L.; Badar, R.; Ullah, A.; Karam, F.W.; Khan, Z.A.; Rehman, A.U. Consensus based SoC trajectory tracking control design for economic-dispatched distributed battery energy storage system. PLoS ONE 2020, 15, e0232638. [Google Scholar] [CrossRef] [PubMed]
- Lee, Y.-R.; Kim, H.-J.; Kim, M.-K. Optimal Operation Scheduling Considering Cycle Aging of Battery Energy Storage Systems on Stochastic Unit Commitments in Microgrids. Energies 2021, 14, 470. [Google Scholar] [CrossRef]
- Xu, B.; Oudalov, A.; Ulbig, A.; Andersson, G.; Kirschen, D.S. Modeling of Lithium-Ion Battery Degradation for Cell Life Assessment. IEEE Trans. Smart Grid 2018, 9, 1131–1140. [Google Scholar] [CrossRef]
- Gong, X. Modeling of Lithium-ion Battery Considering Temperature and Aging Uncertainties. Ph.D. Thesis, University of Michigan-Dearbor, Dearborn, MI, USA, 2016. [Google Scholar]
- Liu, K.; Li, K.; Yang, Z.; Zhang, C.; Deng, J. An advanced Lithium-ion battery optimal charging strategy based on a coupled thermoelectric model. Electrochim. Acta 2017, 225, 330–344. [Google Scholar] [CrossRef]
- Zhang, C.; Li, K.; Deng, J.; Song, S. Improved Realtime State-of-Charge Estimation of Battery Based on a Novel Thermoelectric Model. IEEE Trans. Ind. Electron. 2017, 64, 654–663. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Li, K.; Deng, J. Real-time estimation of battery internal temperature based on a simplified thermoelectric model. J. Power Sources 2016, 302, 146–154. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
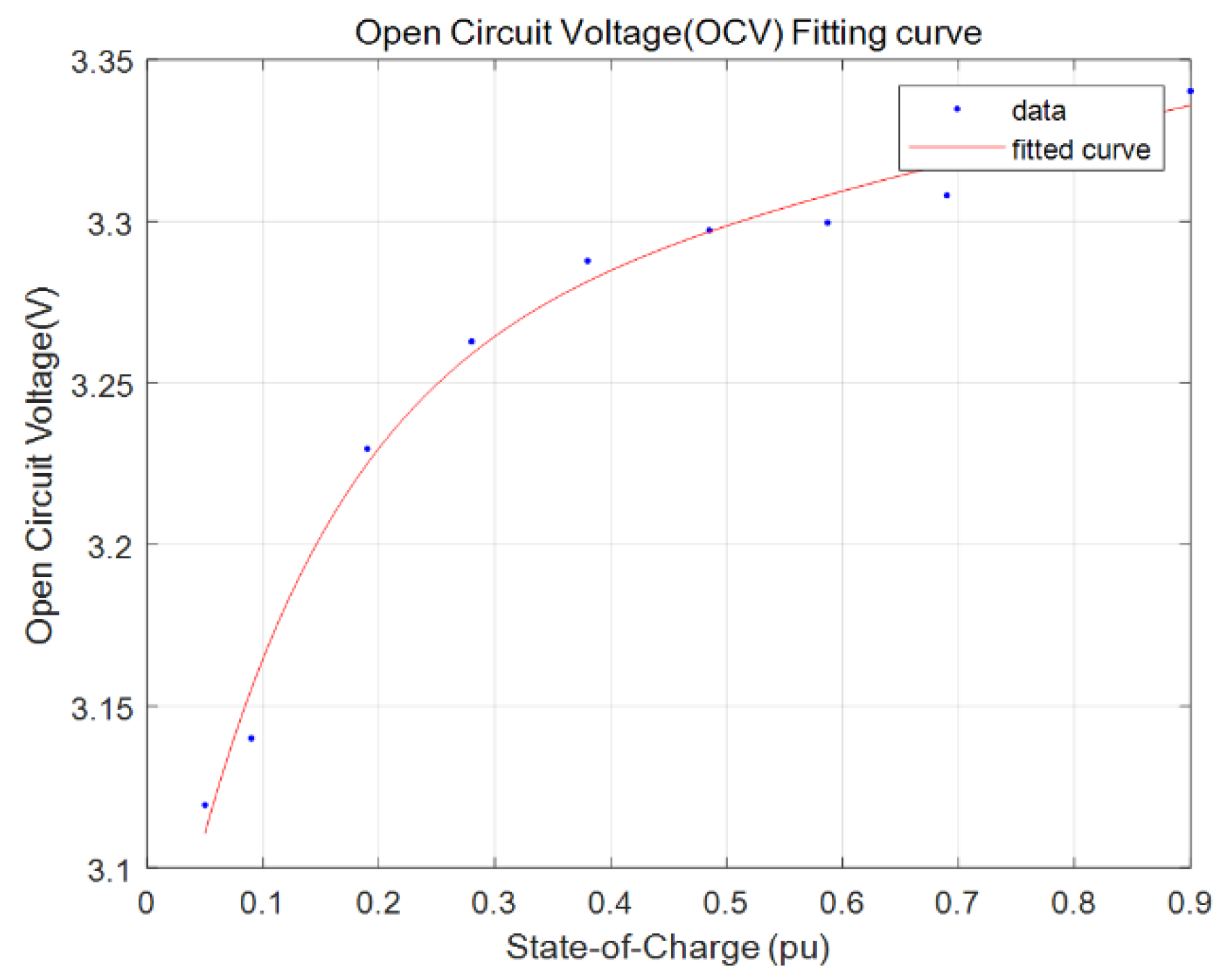
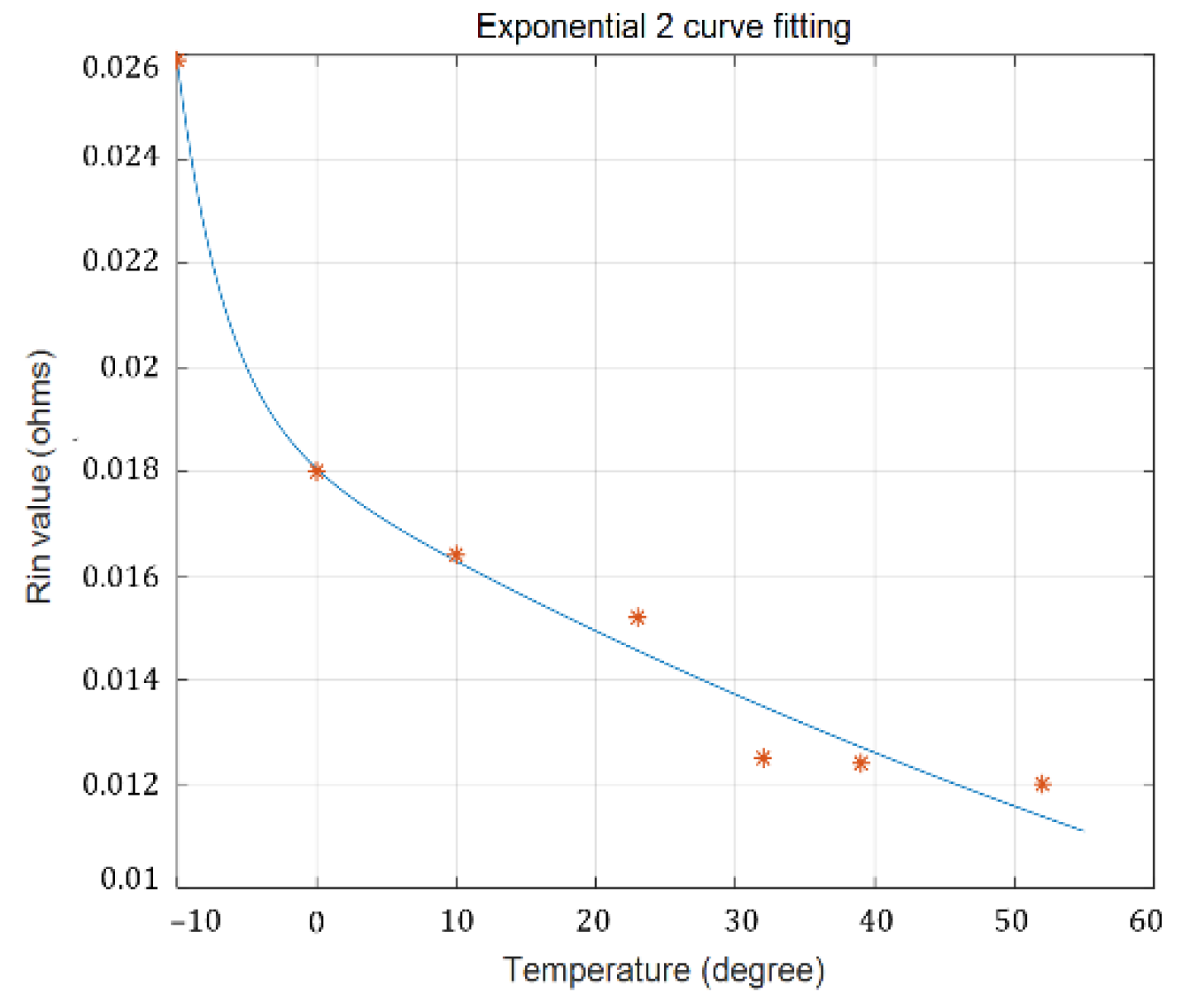
| Parameter | a | b | c | d |
|---|---|---|---|---|
| Value | 3.263 | 0.02451 | −0.2297 | −7.666 |
| Parameter | ||||
| Value | −0.001202 | 0.2458 | −1.248 | |
| Parameter | ||||
| Value | −0.007113 | 2.328 | 0.03044 | |
| Parameter | ||||
| Value | −1.899 | −0.04233 | ||
| Parameter | ||||
| Value | 0.569 | 0.01919 |
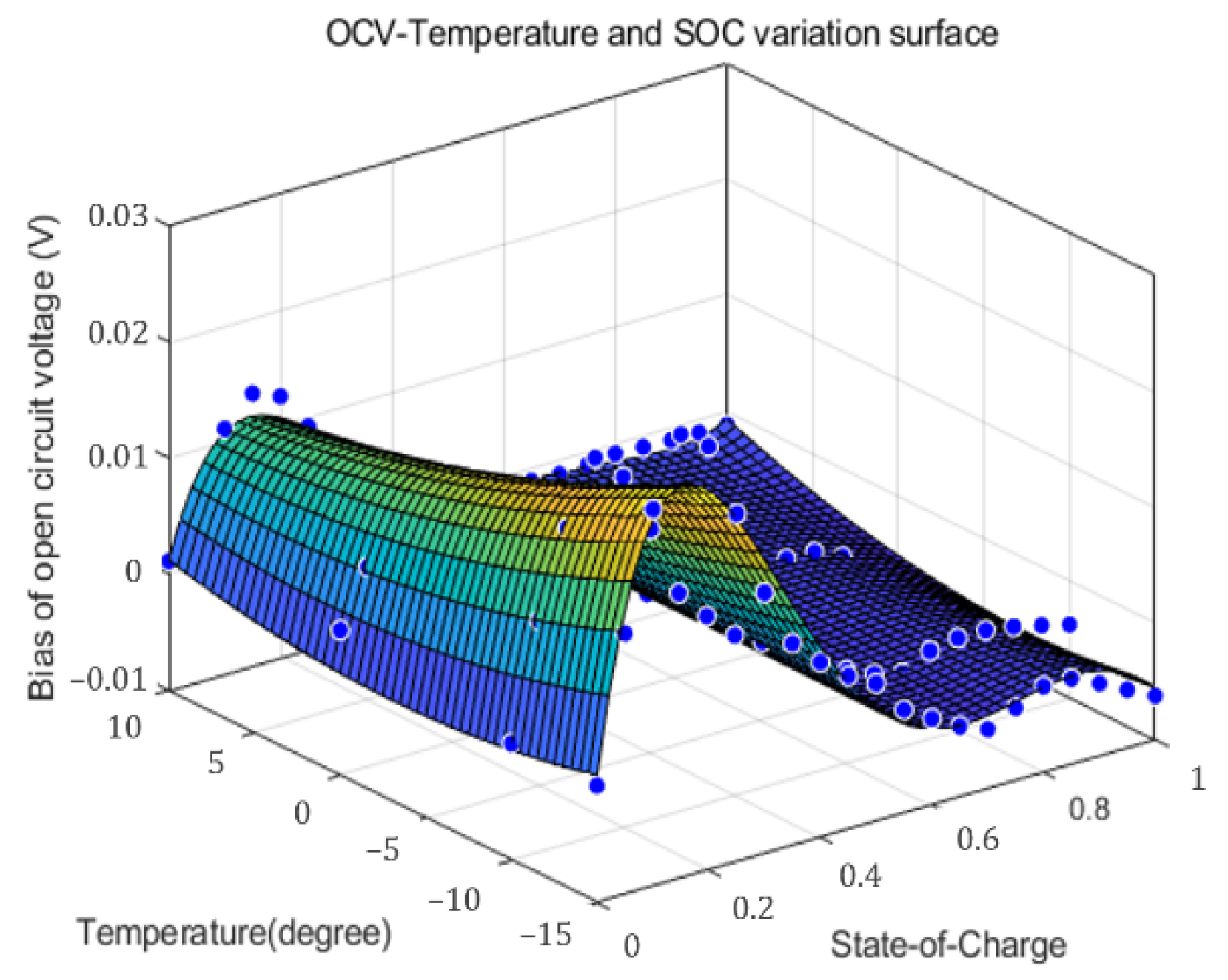
| Parameter | a | b | c | d |
|---|---|---|---|---|
| Value | 0.0003448 | −0.2954 | 0.01771 | −0.008504 |
| Parameter | ||||
| Value | 0.04375 | −0.05367 | 0.01182 | |
| Parameter | ||||
| Value | 0.0005085 | 0.0004819 | ||
| Parameter | ||||
| Value |
| Parameter | ||||
| Value | 0.05018 | −0.1373 | 0.1224 | |
| Parameter | ||||
| Value | 0.005049 | −0.02099 | −0.001888 | |
| Parameter | ||||
| Value | −0.001455 | |||
| Parameter | ||||
| Value |
| Parameter | a | b |
|---|---|---|
| Value | 53.99 | −1.573 |
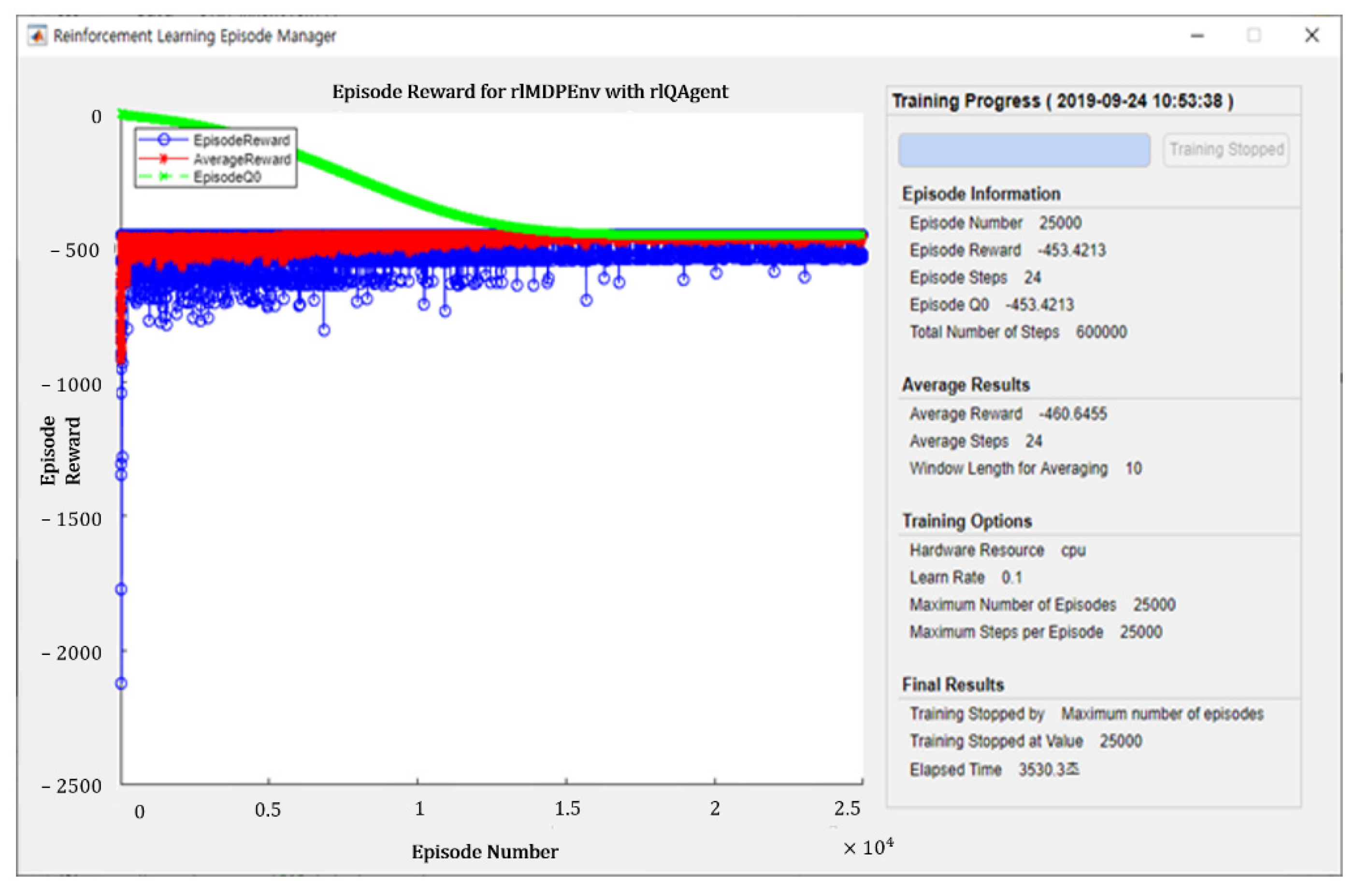
| Q-Learning Agent Options | Learning Rate | Epsilon Greedy Exploration Probability | Epsilon Decay | |
|---|---|---|---|---|
| Parameter value | 0.1 | 0.9 | 0.01 | |
| Trading Options | Max steps per episode | Max episodes | ||
| Parameter Value | 20,000 | 20,000 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, W.; Chae, M.; Won, D. Optimal Scheduling of Energy Storage System Considering Life-Cycle Degradation Cost Using Reinforcement Learning. Energies 2022, 15, 2795. https://doi.org/10.3390/en15082795
Lee W, Chae M, Won D. Optimal Scheduling of Energy Storage System Considering Life-Cycle Degradation Cost Using Reinforcement Learning. Energies. 2022; 15(8):2795. https://doi.org/10.3390/en15082795
Chicago/Turabian StyleLee, Wonpoong, Myeongseok Chae, and Dongjun Won. 2022. "Optimal Scheduling of Energy Storage System Considering Life-Cycle Degradation Cost Using Reinforcement Learning" Energies 15, no. 8: 2795. https://doi.org/10.3390/en15082795
APA StyleLee, W., Chae, M., & Won, D. (2022). Optimal Scheduling of Energy Storage System Considering Life-Cycle Degradation Cost Using Reinforcement Learning. Energies, 15(8), 2795. https://doi.org/10.3390/en15082795