
Exhaust Emissions from Plug-in and HEV Vehicles in Type-Approval Tests and Real Driving Cycles

 ,
,  ,
,  ,
,  and
and
Abstract
:1. Introduction
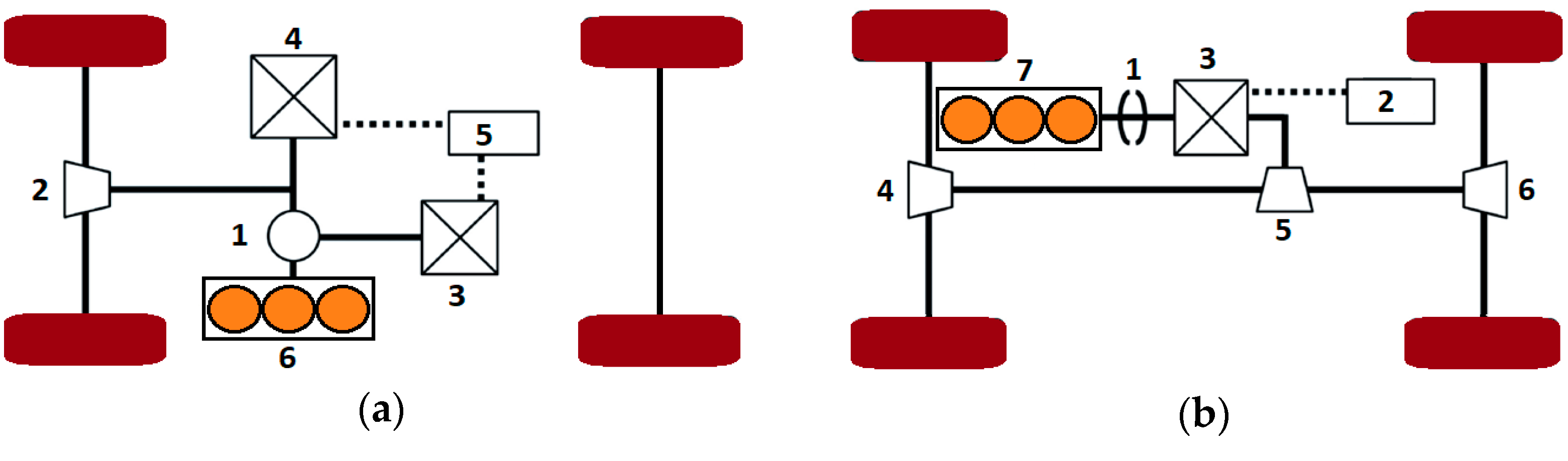
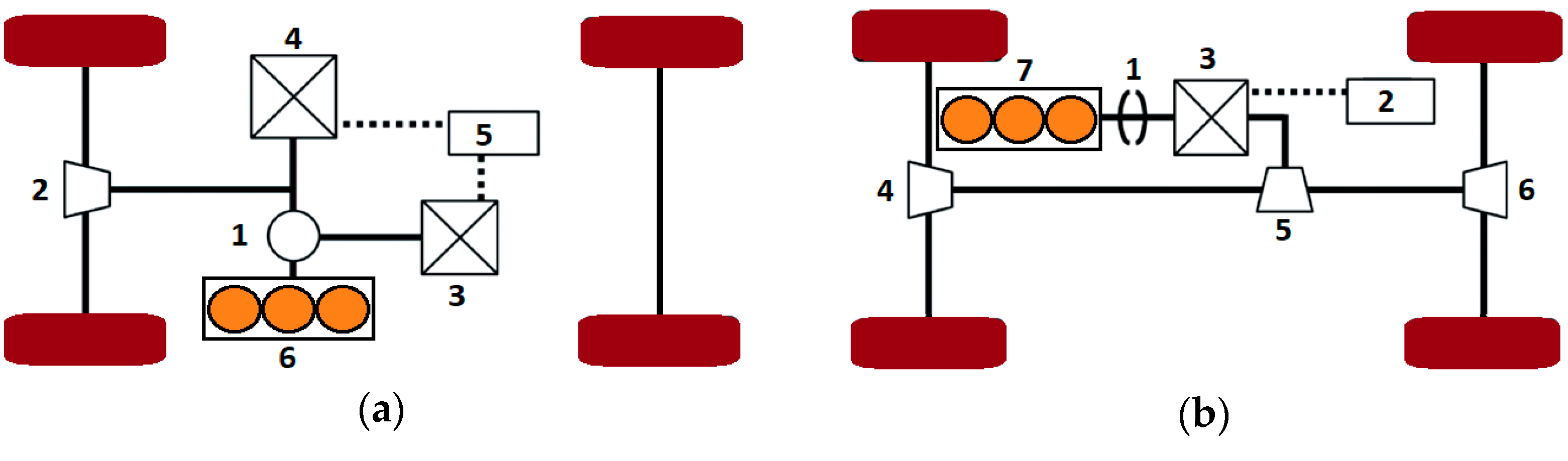
1.1. The Configurations of Hybrid Vehicles
- Power-split hybrid—in a power-split hybrid drive, there are two power sources: EM and ICE; the power from these two sources can be shared to drive the wheels via a power split device; the ratio can be from 100% for the CE to 100% for the EM, or anything in between; the ICE can act as a generator charging the batteries [23,24,25,26,27].
1.2. Tests of Hybrid Vehicles
1.3. Research on Hybrid Vehicles
2. Emission of Hybrid Vehicles
3. Materials and Methods
3.1. Research Methodology
3.2. Vehicles Tested
3.3. Laboratory Test
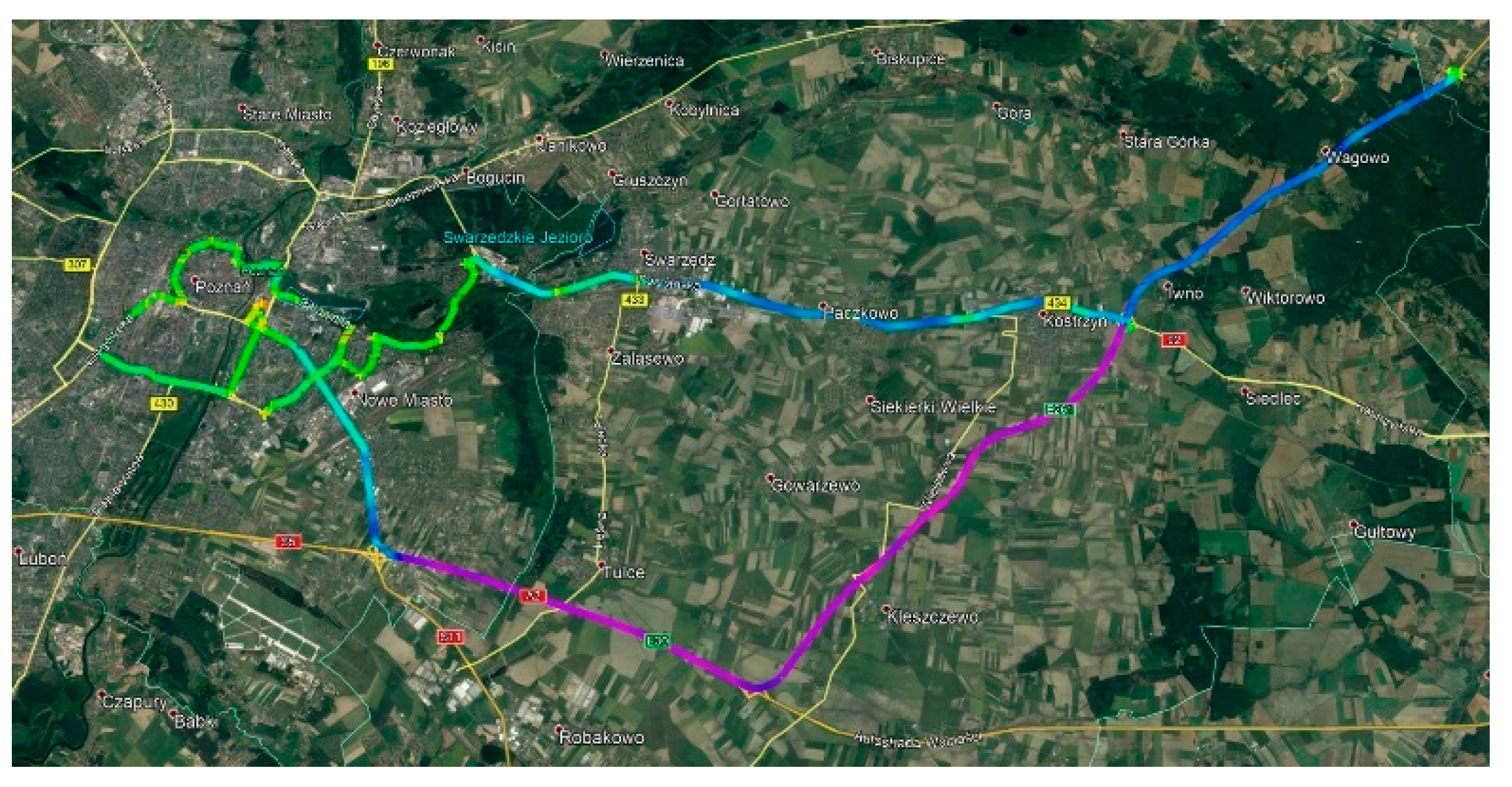
3.4. Real Driving Emission
4. Results and Discussion
4.1. Results in WLTC
4.1.1. Test Conditions
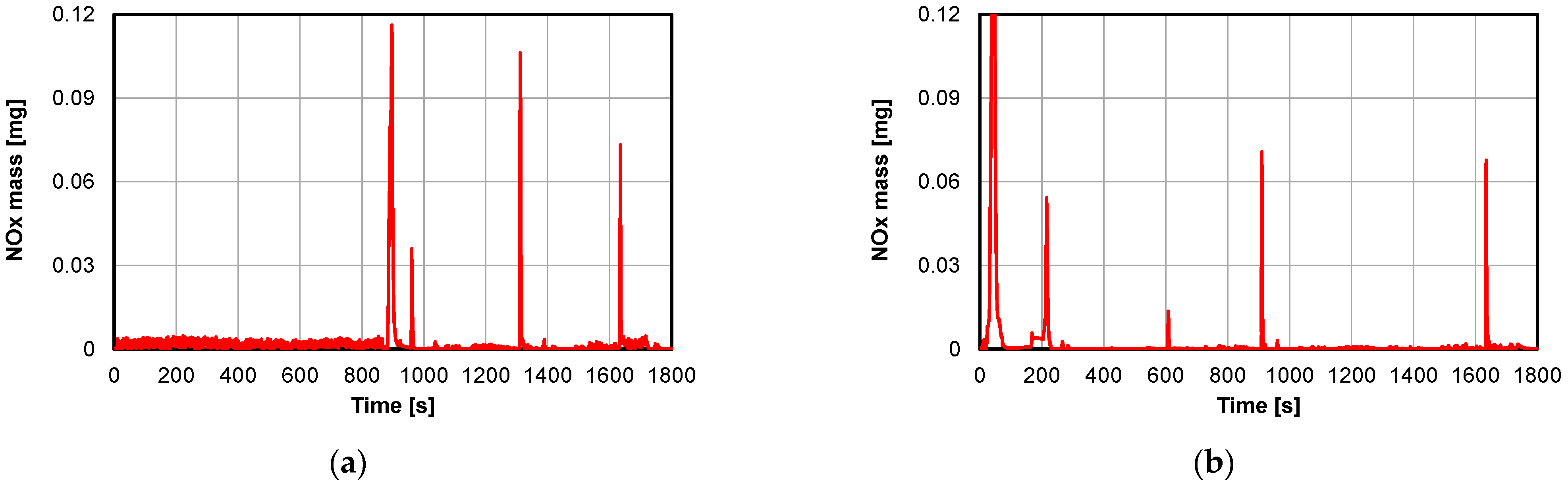
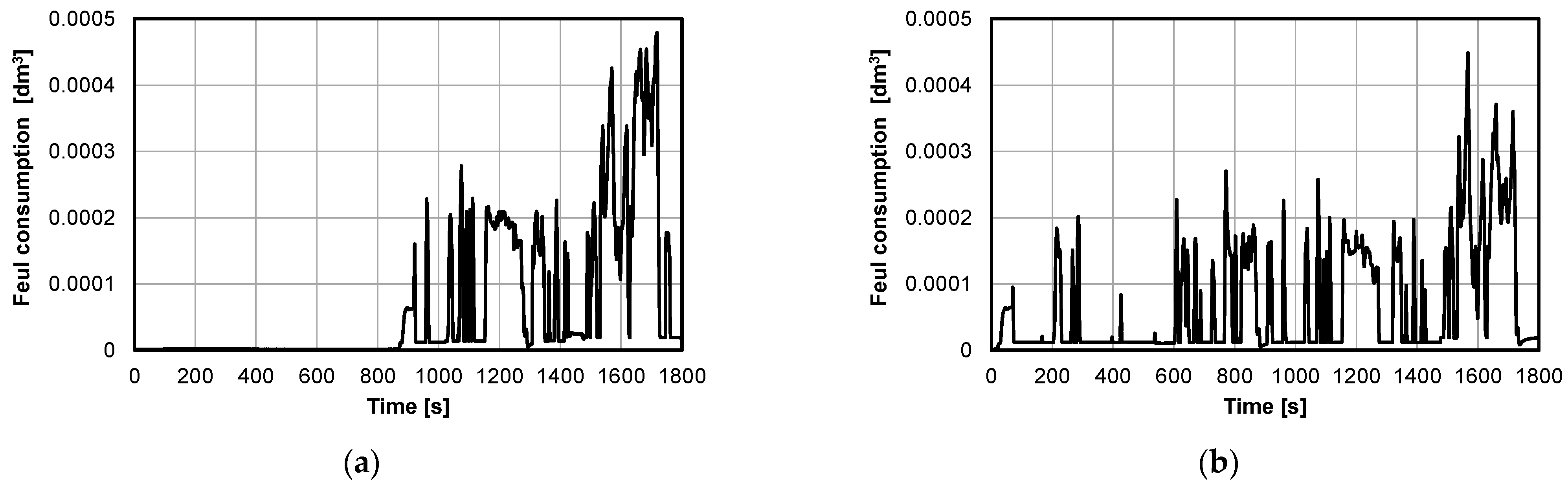
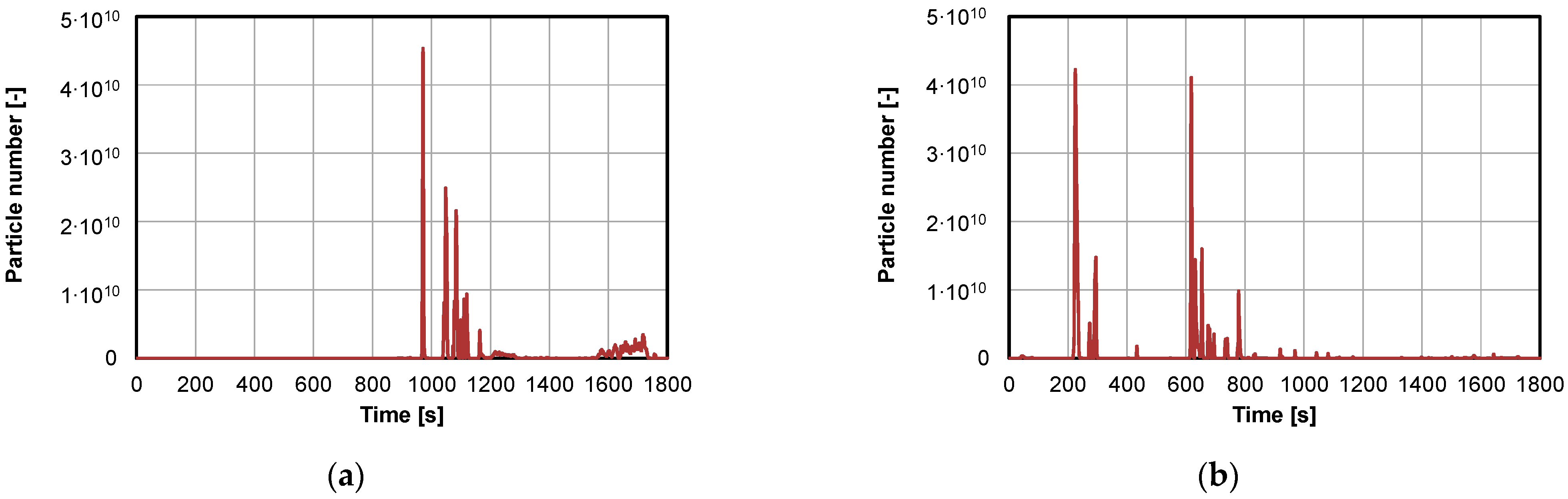
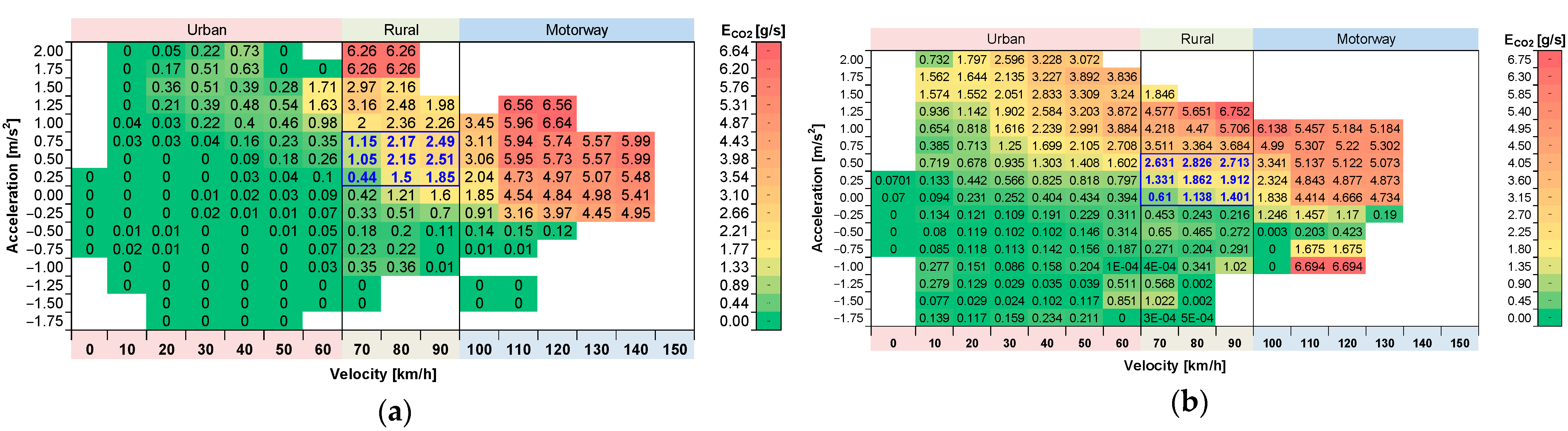
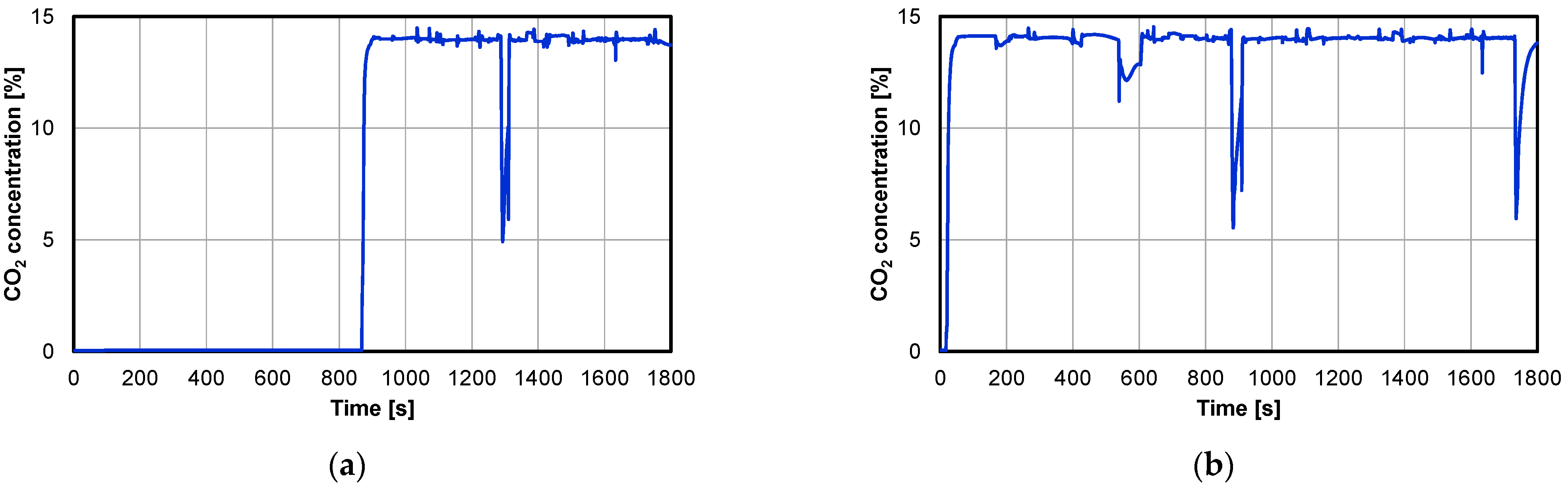
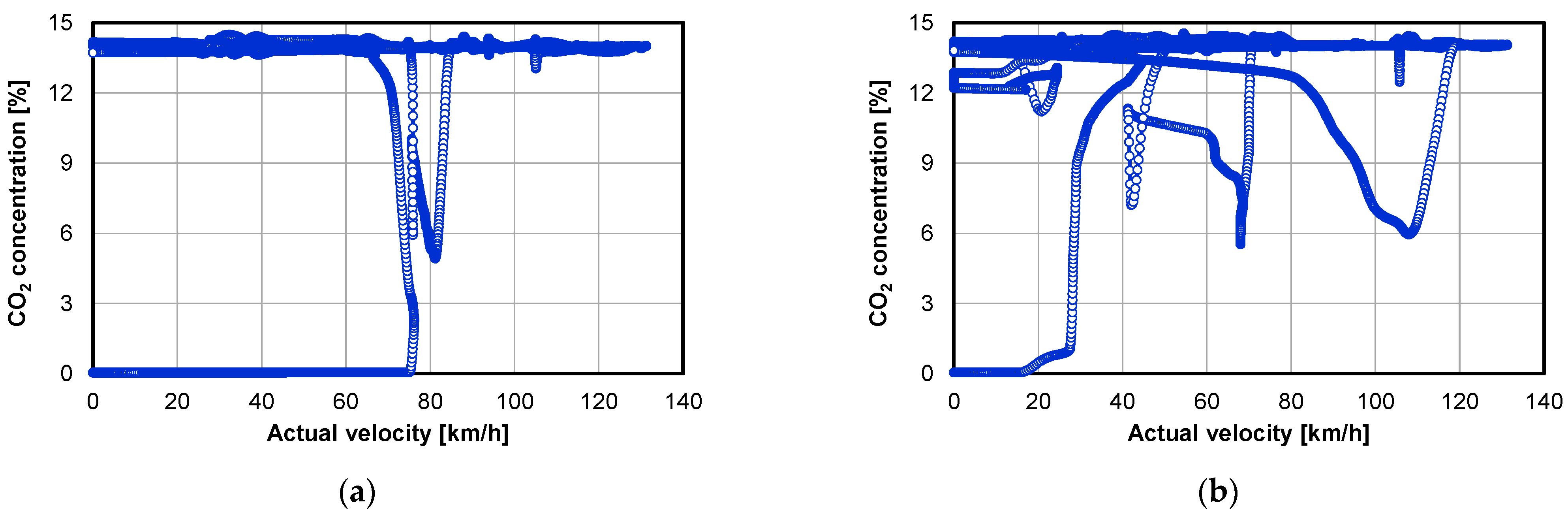
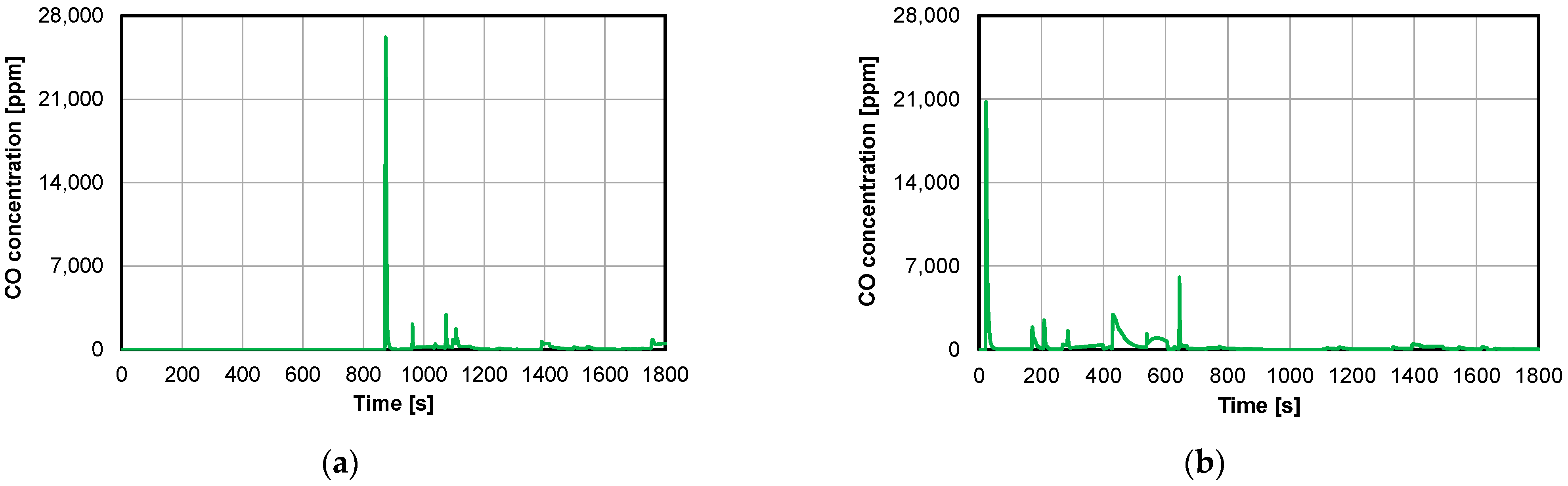
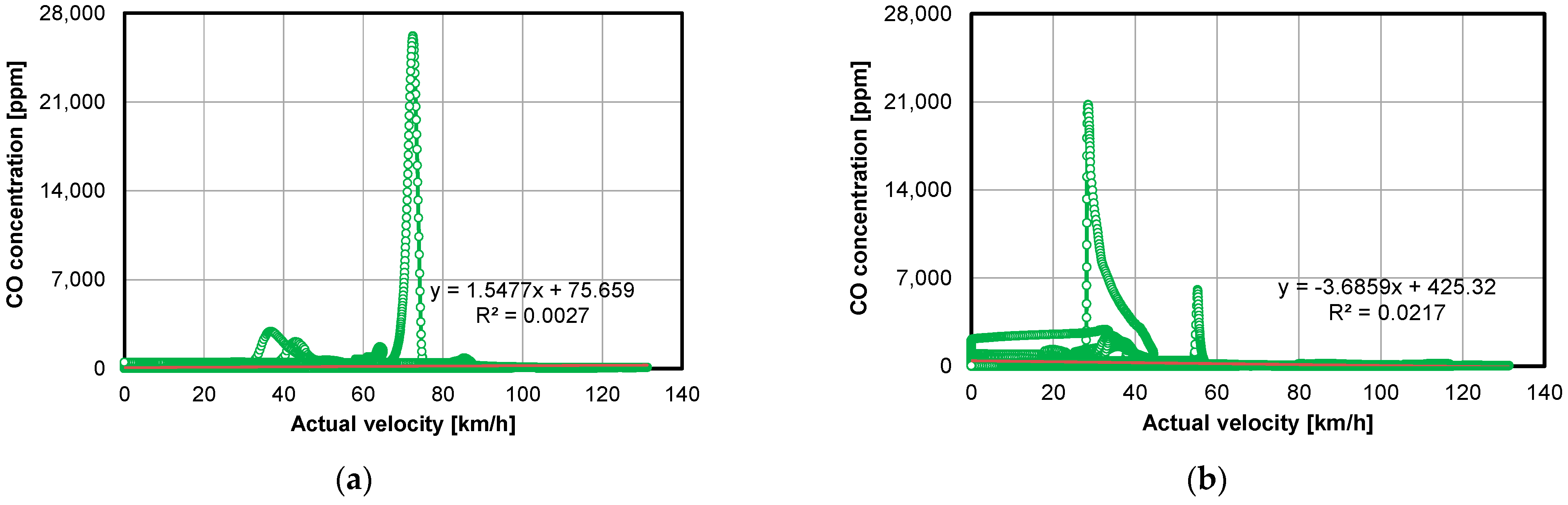
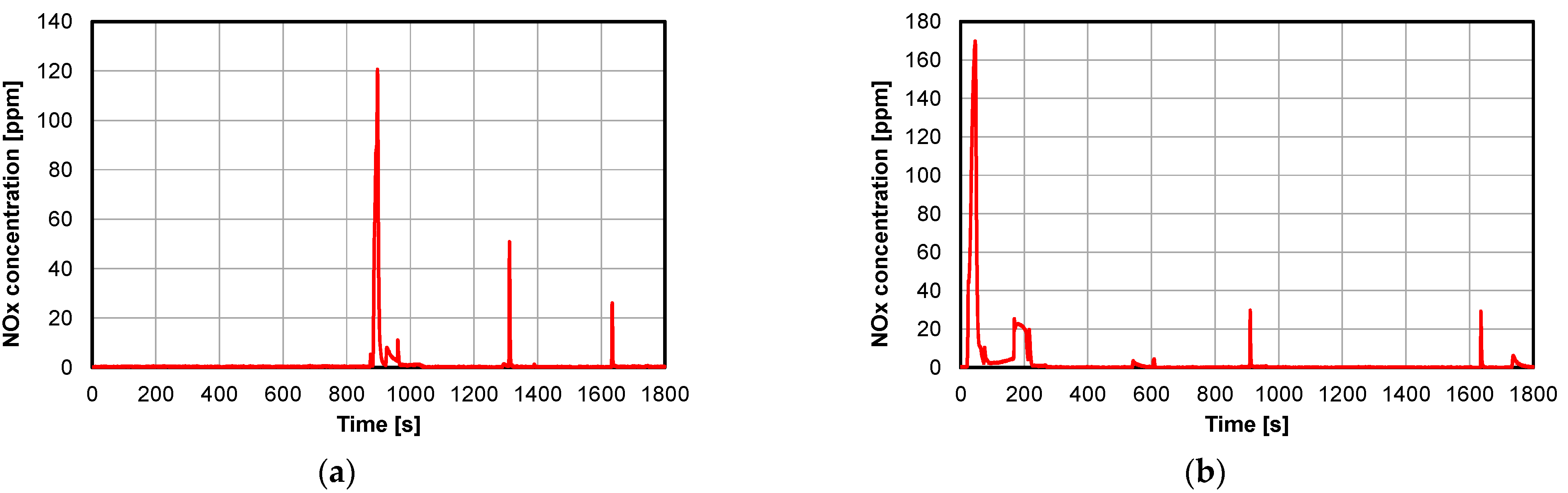
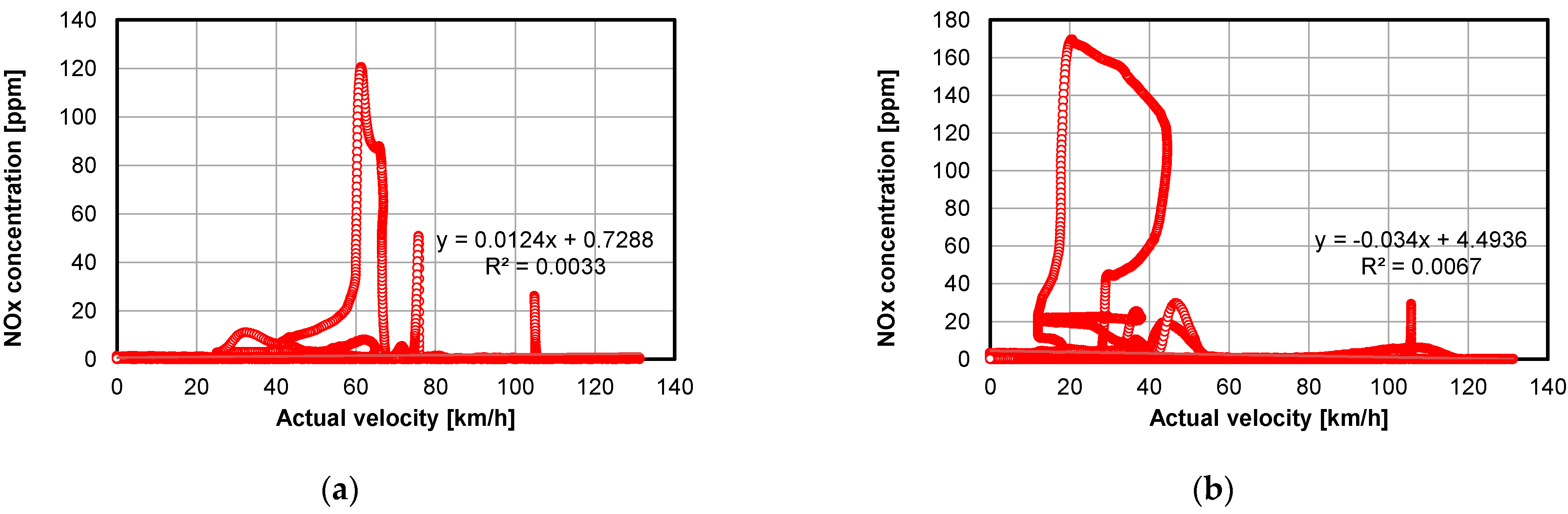
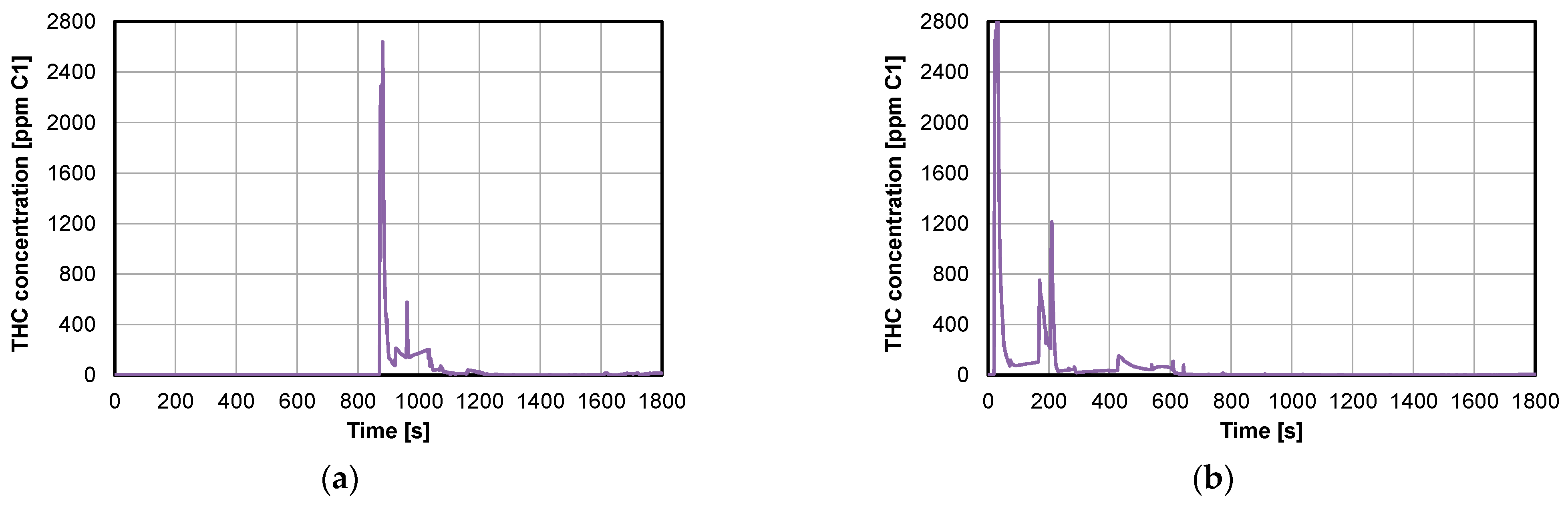
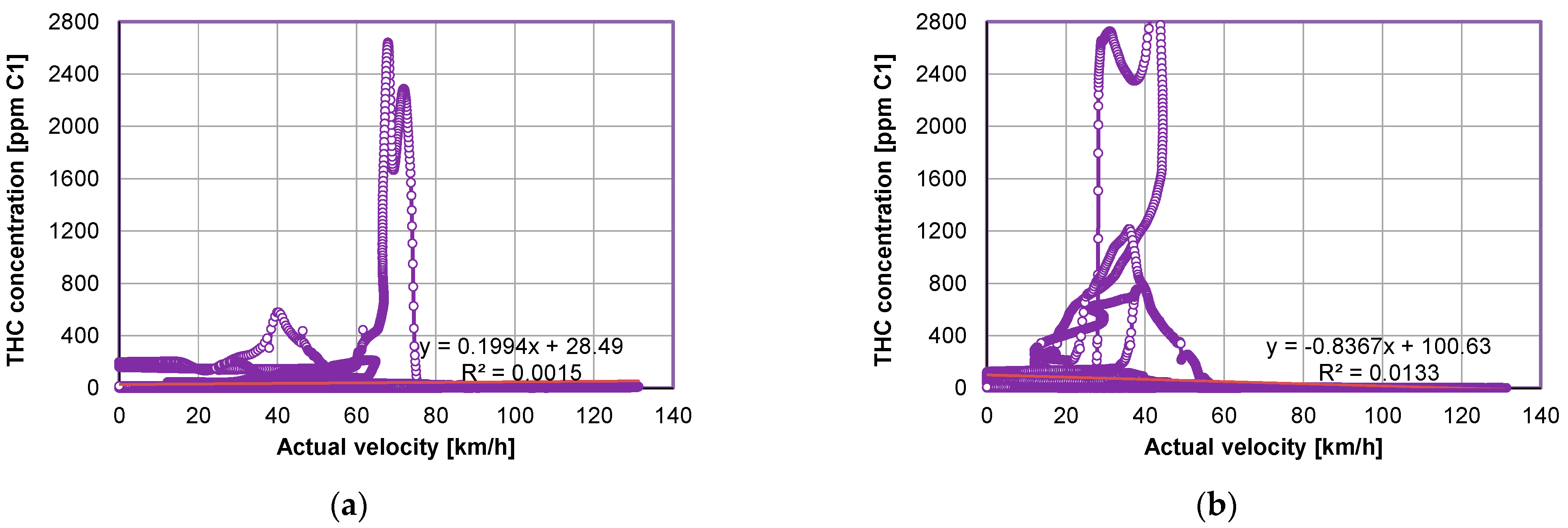
4.1.2. Measurement of the Concentration of Polluting Compounds
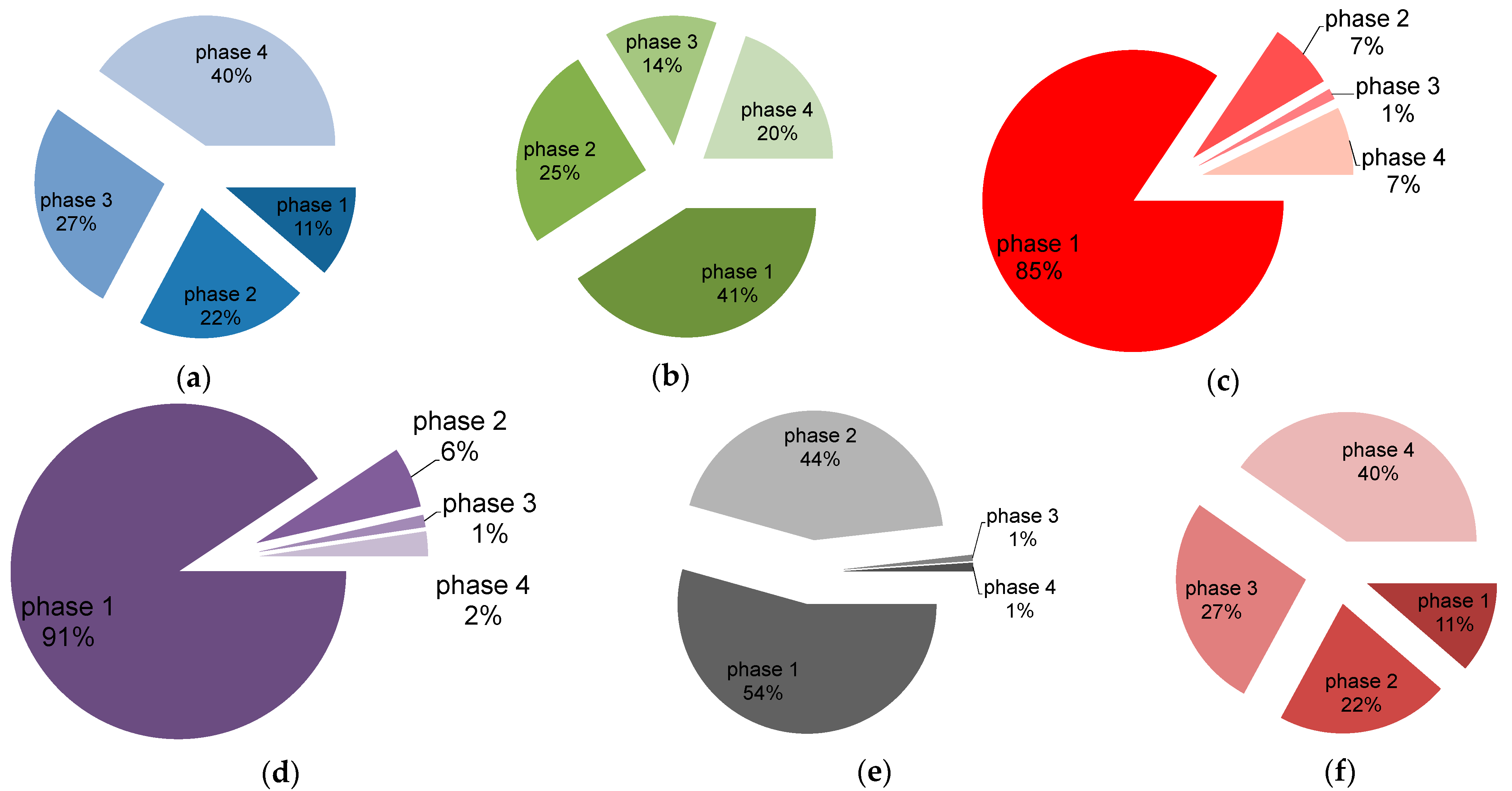
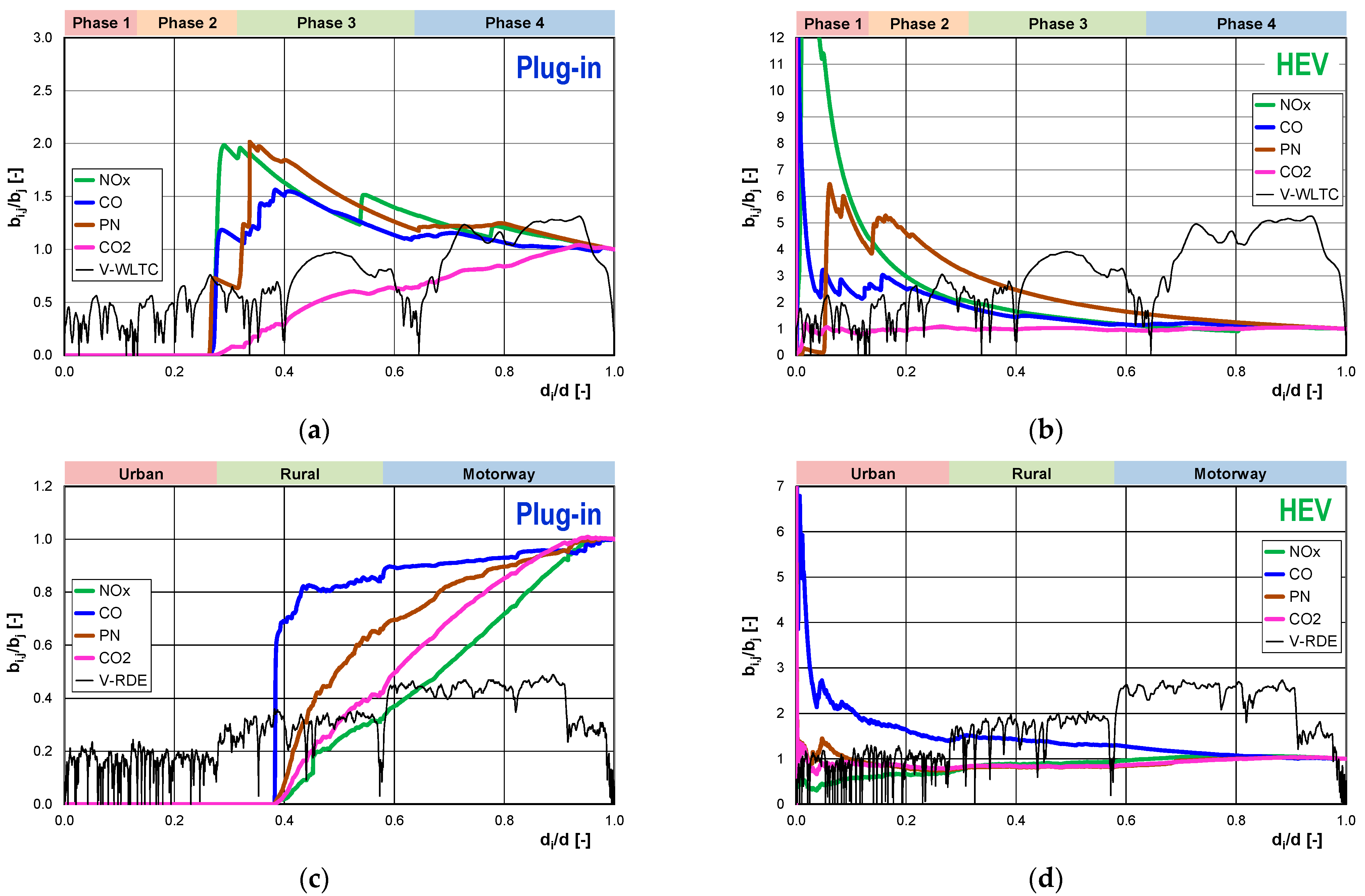
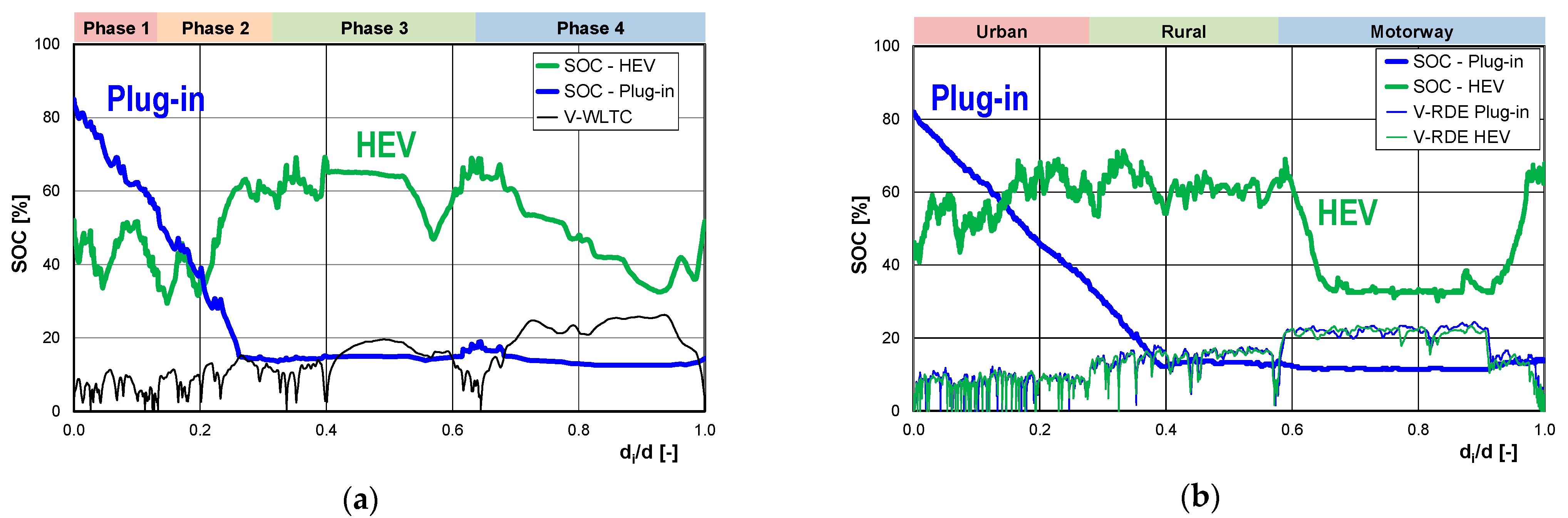
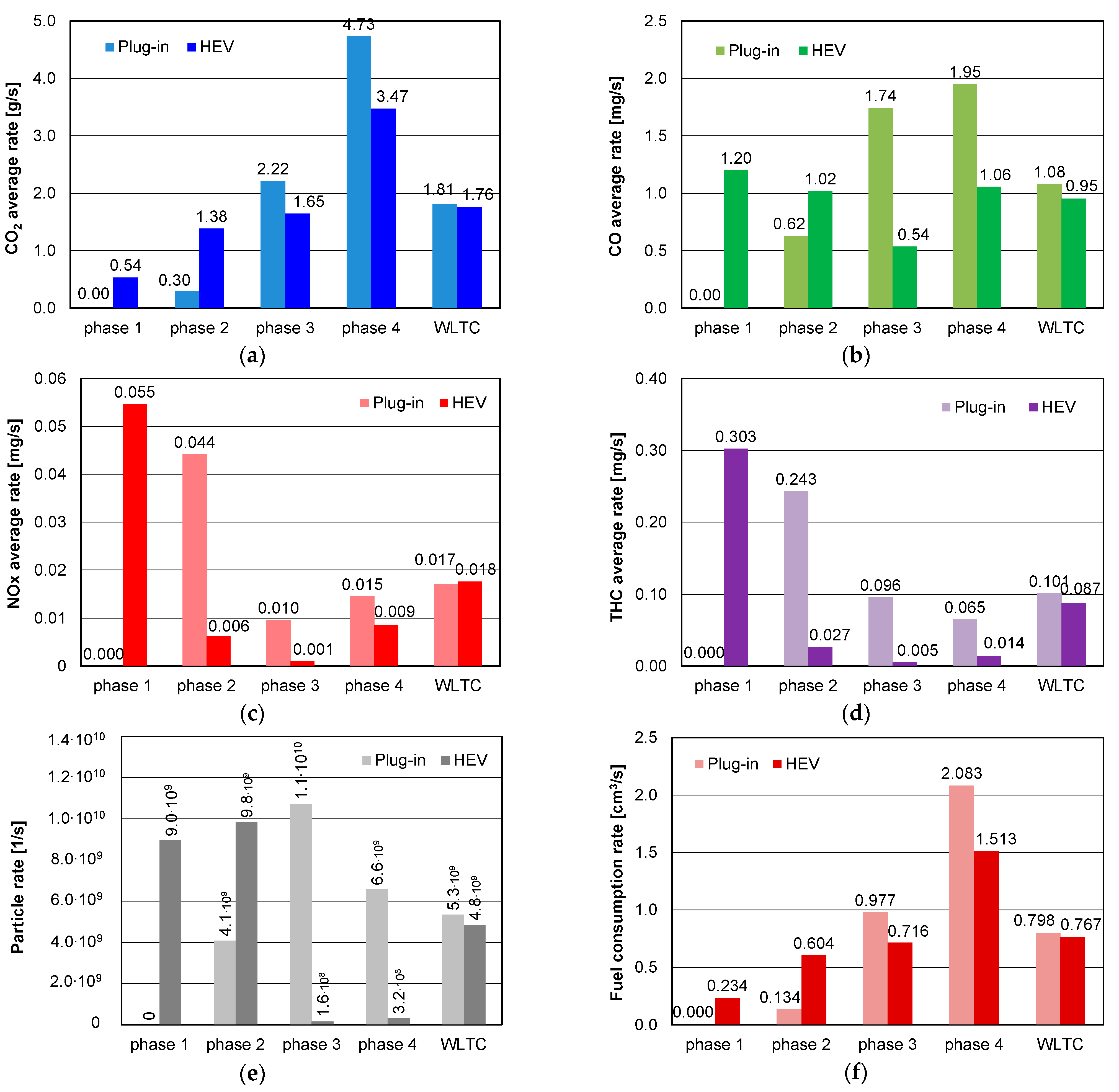
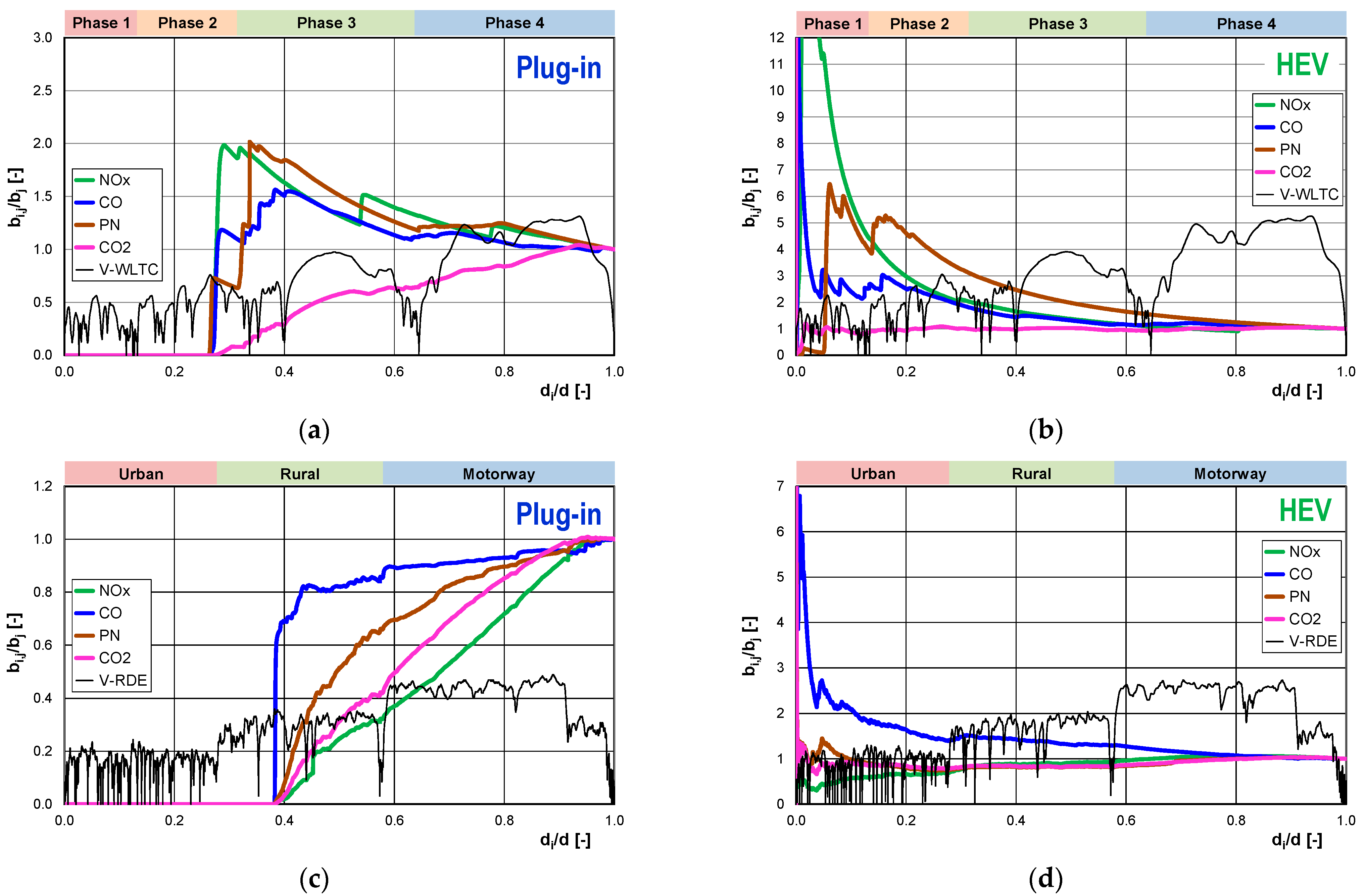
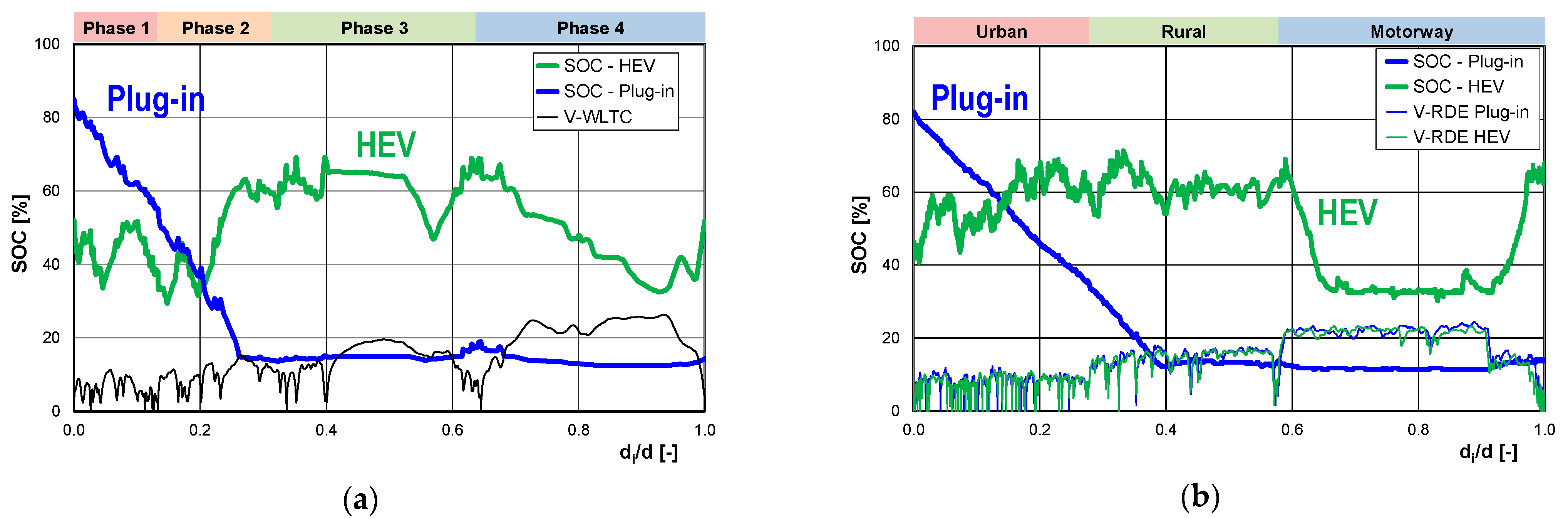
4.1.3. Comparison of Results in the Phases of the WLTC Test
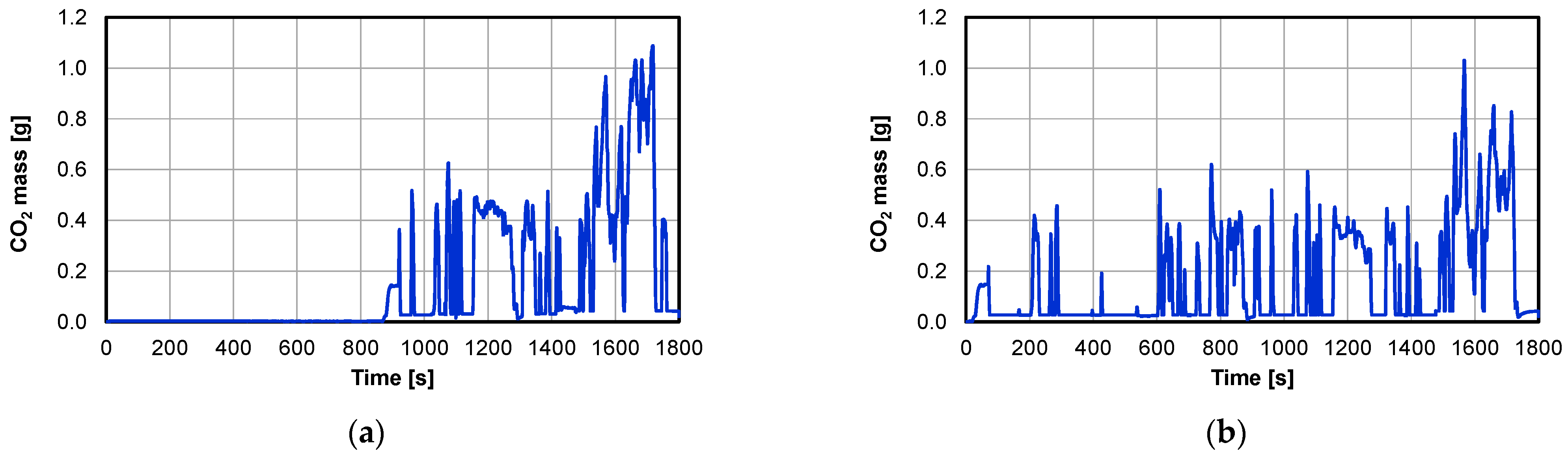
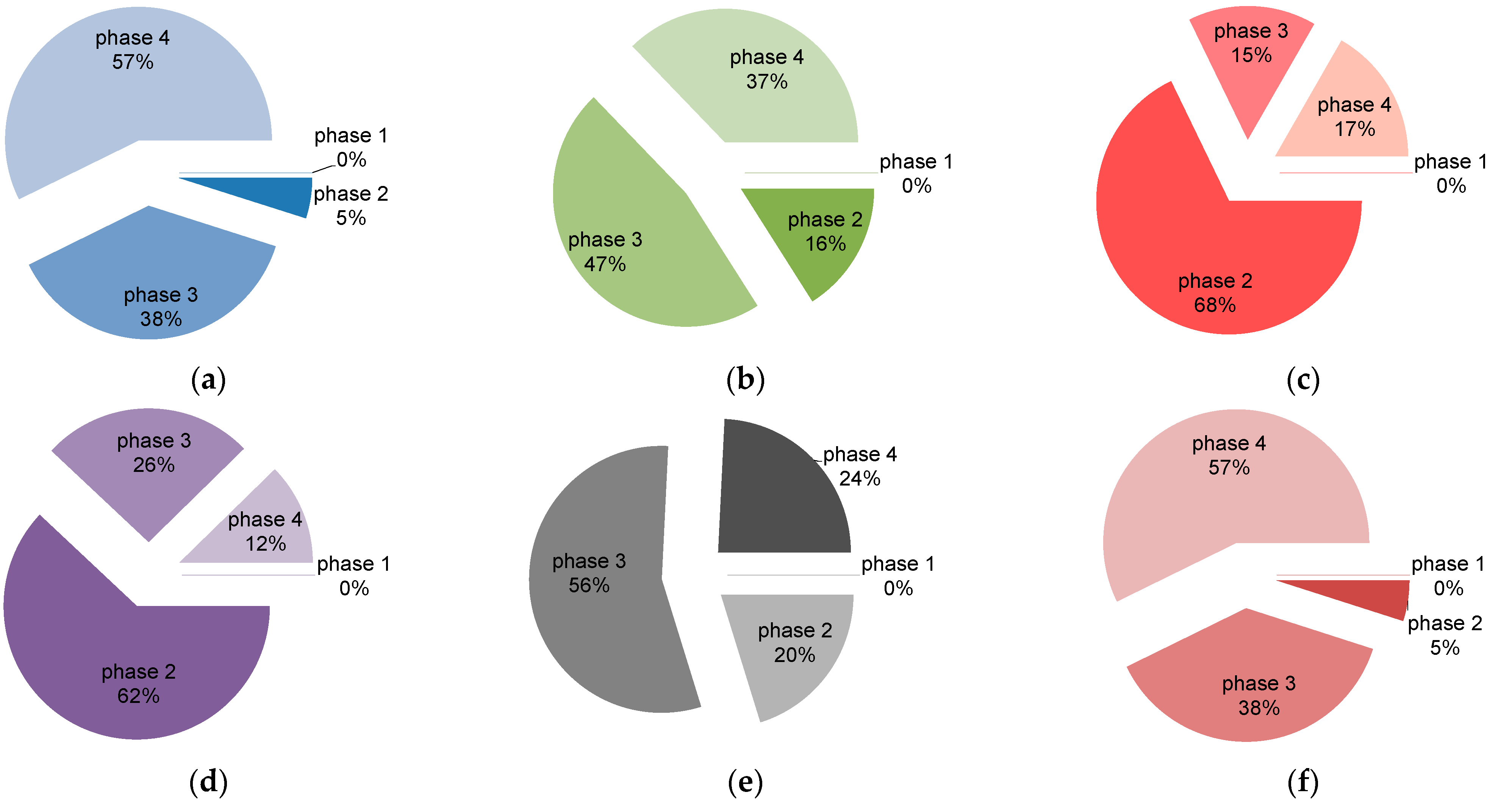
- Relative to on-road CO2 emissions: phase 4 (57%) and phase 3 (38%) have the largest share;
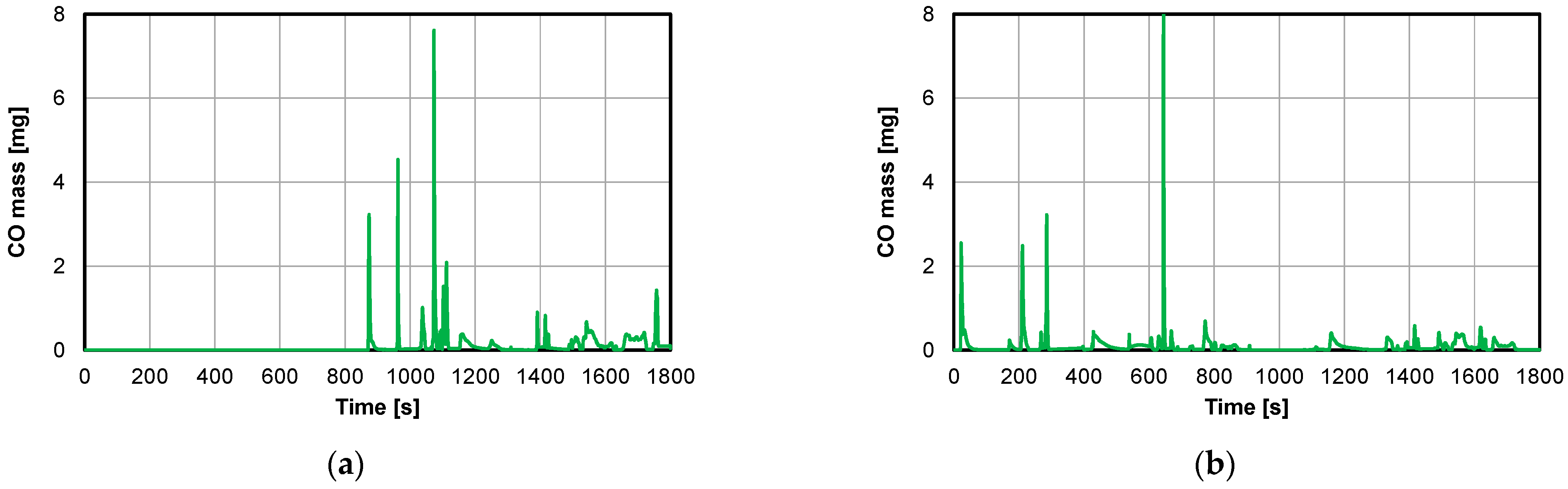
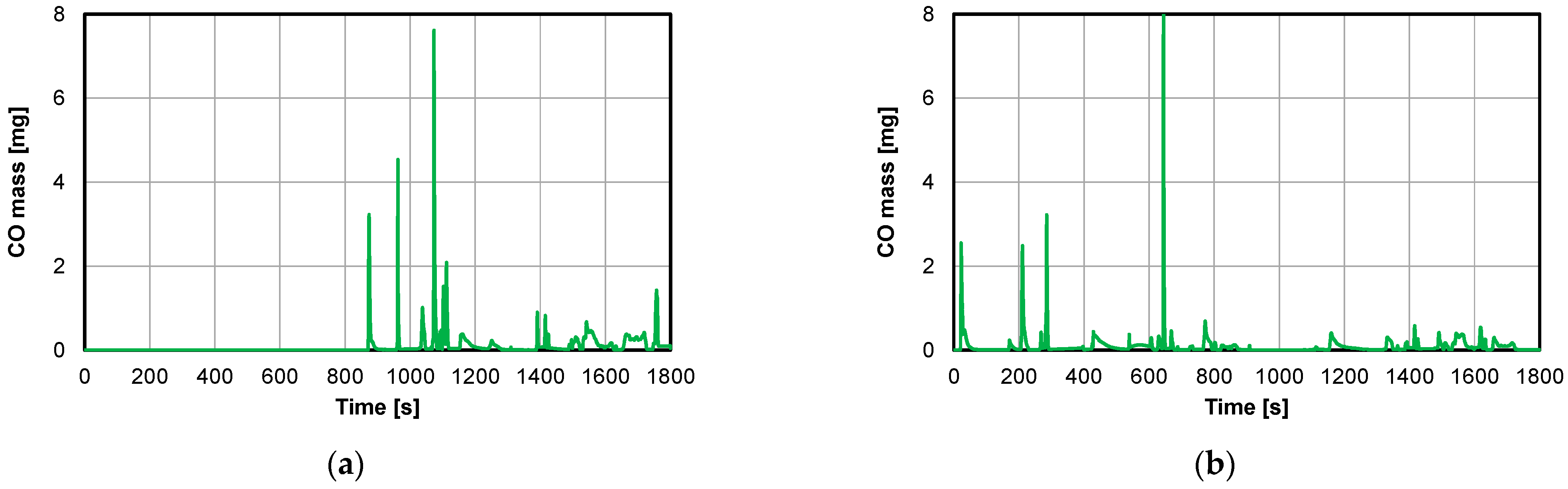
- Relative to on-road CO emissions: phase 3 (47%) and phase 4 (37%) have the largest share;
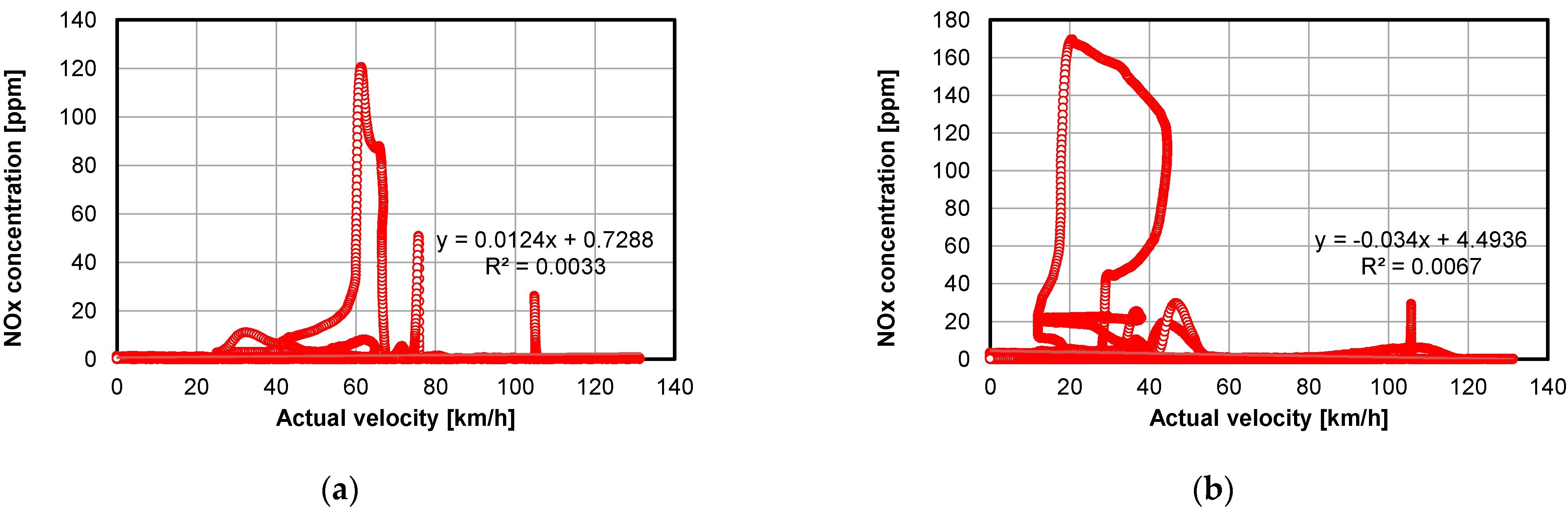
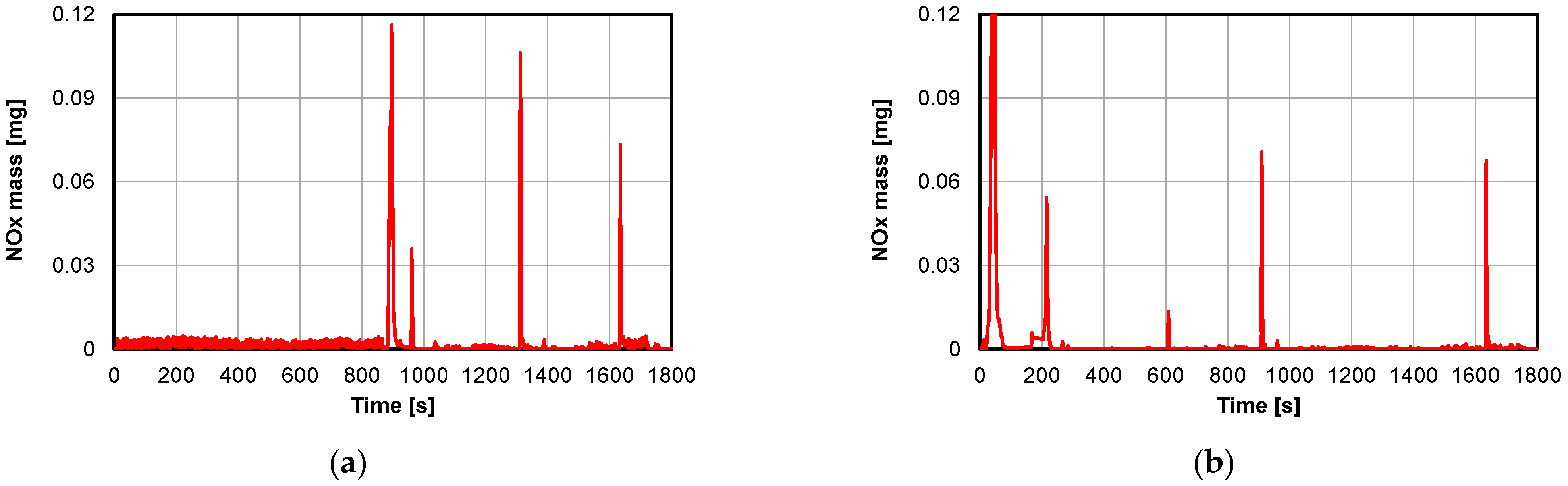
- Relative to on-road NOx emissions: phase 2 (68%) and phase 4 (17%) account for the largest share;
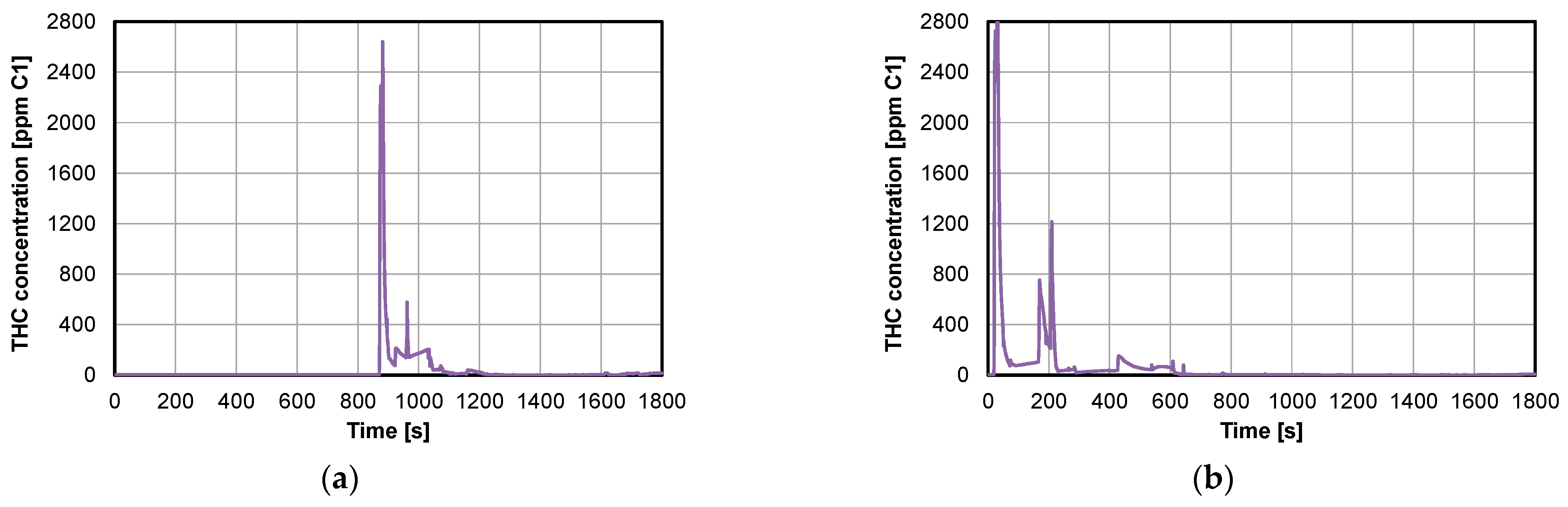
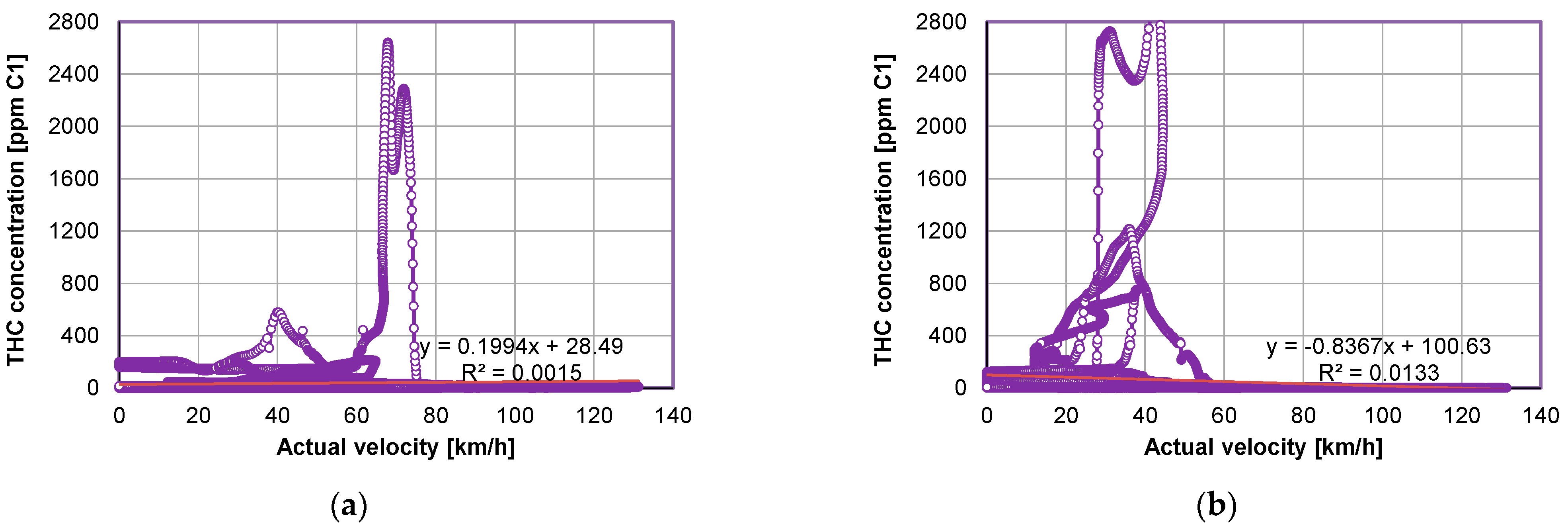
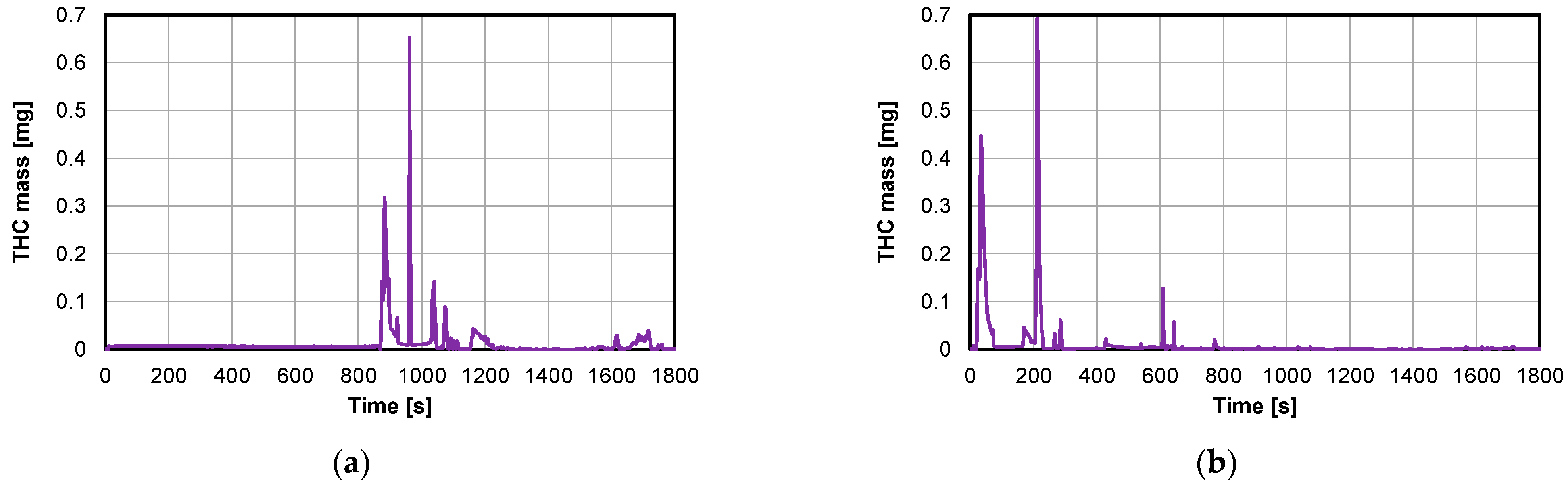
- Relative to on-road emissions of THC: the largest shares are phase 2 (62%) and phase 3 (26%);
- Relative to on-road PN emissions: the largest shares are phase 3 (56%) and phase 4 (24%);
- Relative to mileage fuel consumption: phase 4 (57%) and phase 3 (38%) account for the largest share.
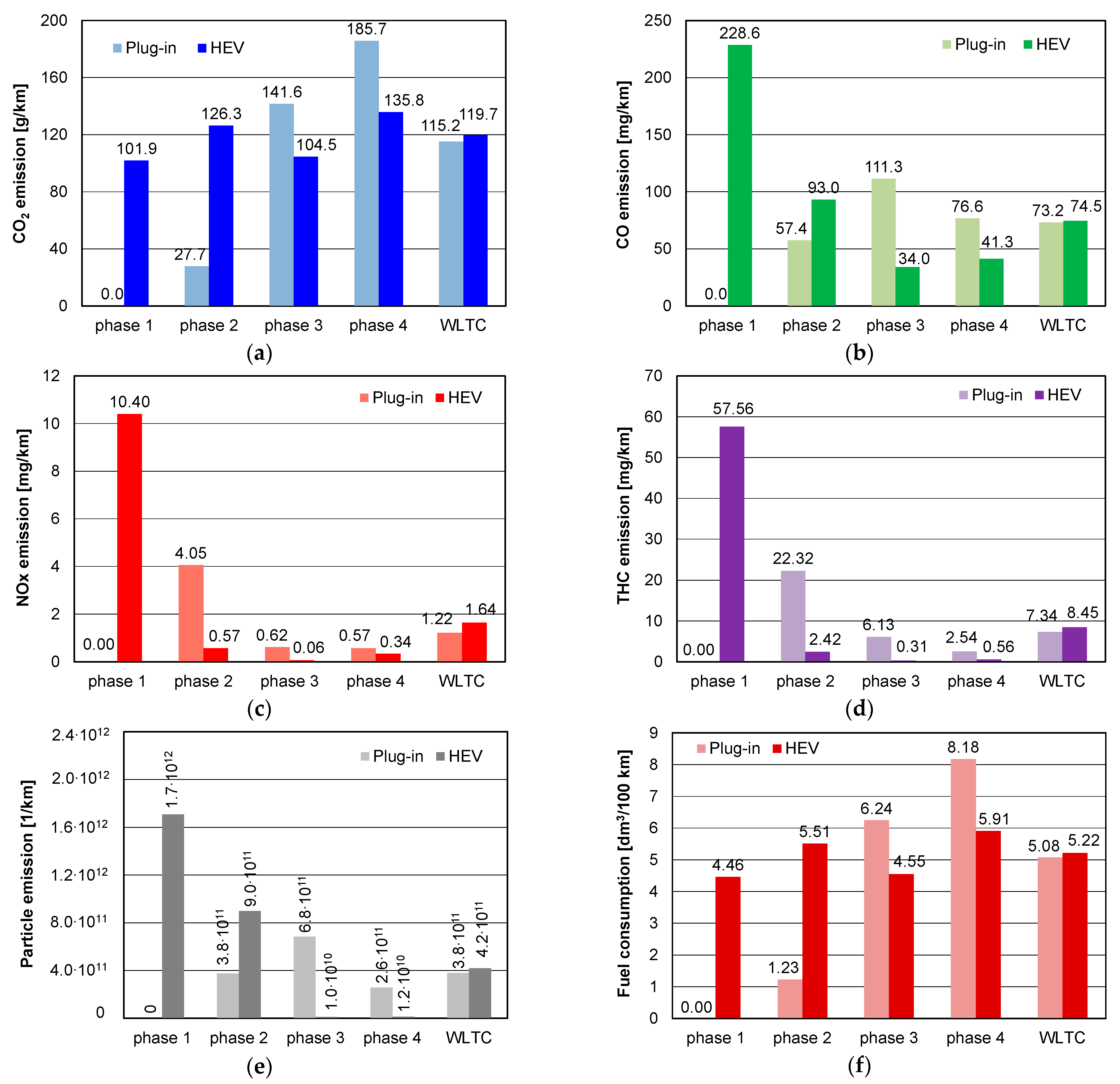
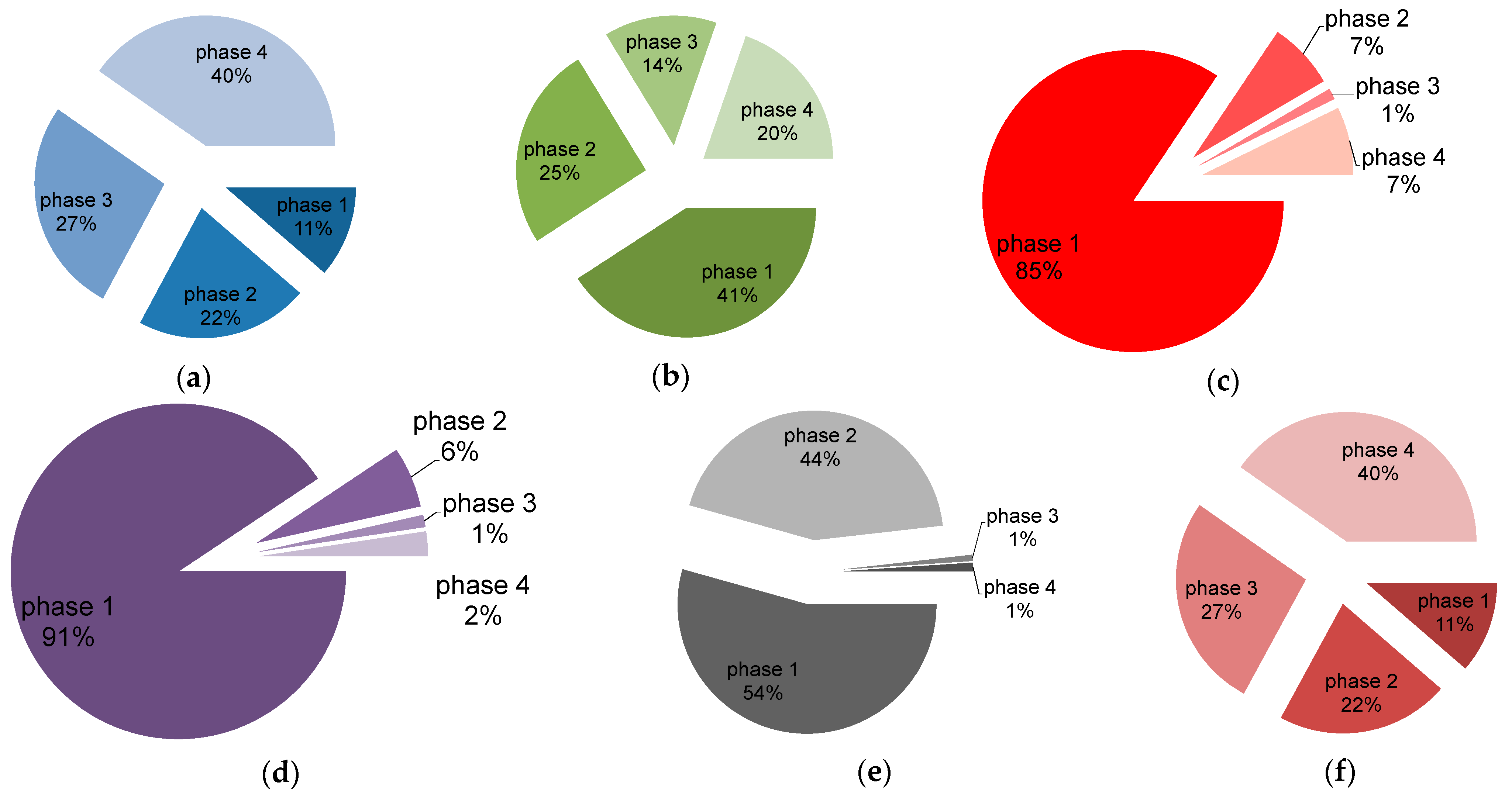
- Relative to on-road CO2 emissions: phase 4 of the test has the largest share (40%), and phase 1 has the smallest share (11%); phases 2 and 3 have shares of 22% and 27%, respectively;
- Relative to on-road CO emissions: the highest share is attributable to phase 1 of the test (41%), and the lowest to phase 3 (14%); phases 2 and 4 account for 25% and 20%, respectively. The main influence on such values in phase 1 is due to engine start-up and catalytic reactor inefficiency. Conversely, the increase in the share in phase 4 is due to the increase in engine load and vehicle speed, i.e., excess of exhaust gases, and possibly too small a volume of the catalytic reactor;
- Relative to on-road NOx emissions: phase 1 of the test has the largest share (85%) and phase 3 the smallest share (1%); phases 2 and 4 have a share of 7% each; the main influence on such values in phase 1 is engine start-up and lack of efficiency of NOx reduction in the catalytic reactor;
- Relative to on-road THC emissions: phase 1 of the test has the largest share (91%) and phase 3 the smallest share (1%); phases 2 and 4 have a share of 6% and 2%. The main impact on such values in phase 1 is due to engine start-up and the significant inefficiency of hydrocarbon oxidation in the catalytic reactor; however, the efficiency of hydrocarbon oxidation in phase 4 of the WLTC test was found to be higher than that of carbon monoxide oxidation;
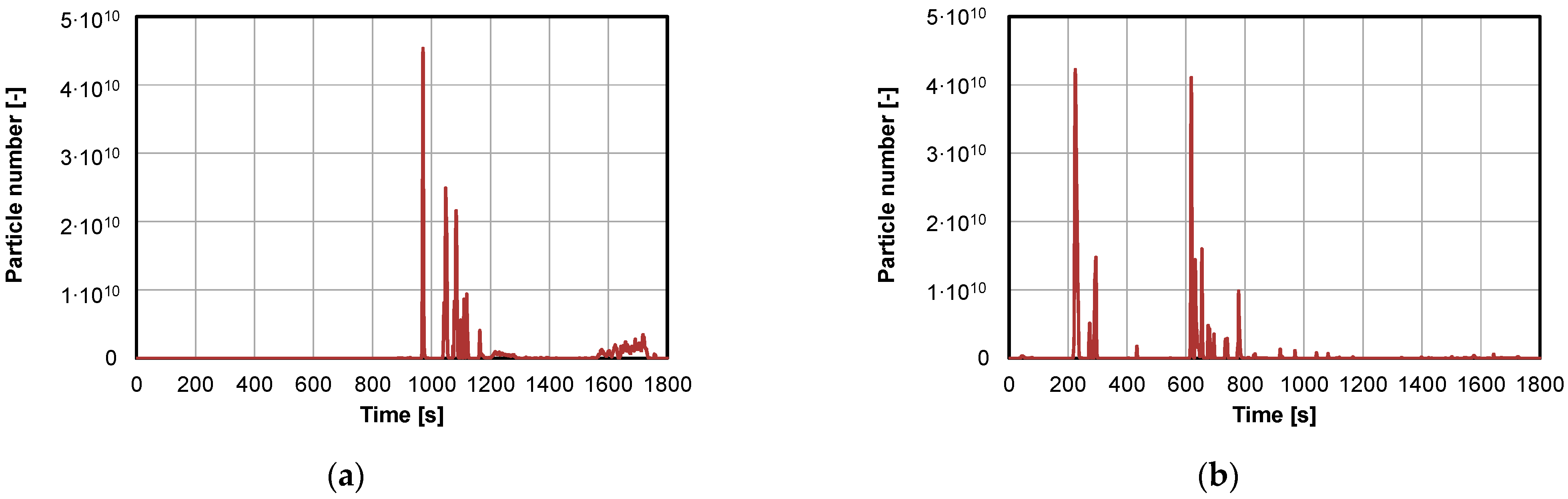
- Relative to the number of NSAs: phases 1 and 2 of the test account for the largest shares (54% and 44%, respectively); 98% of all particulates are emitted in these two phases;
- Relative to the mileage fuel consumption: the largest contribution is from phase 4 of the test (40%) and the smallest from phase 1 (11%); phases 2 and 3 contribute 22% and 27%, respectively; this was mainly influenced by the energy demand of the engine (increased driving speed).
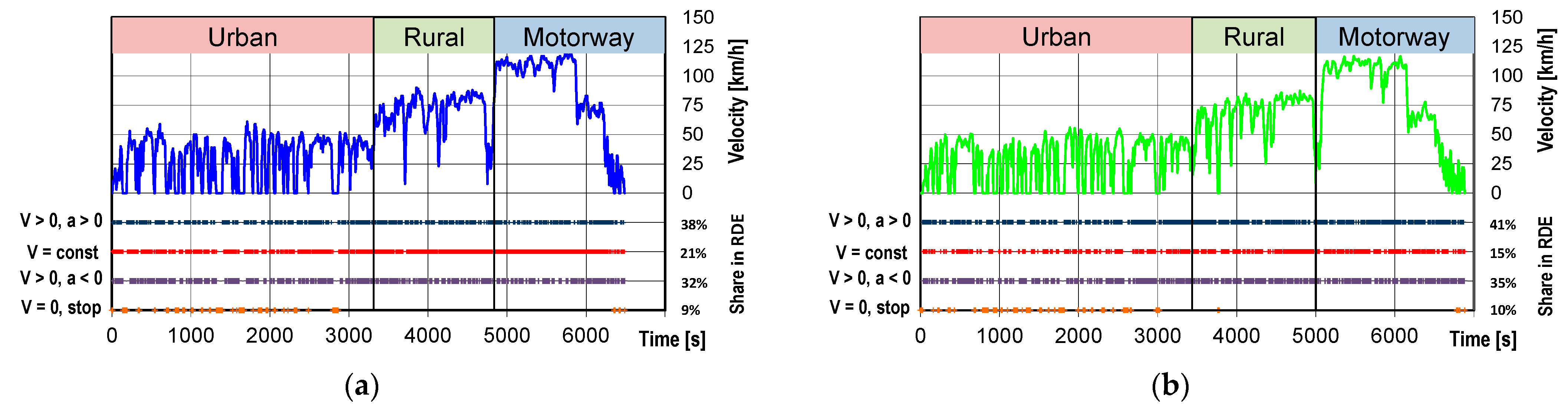
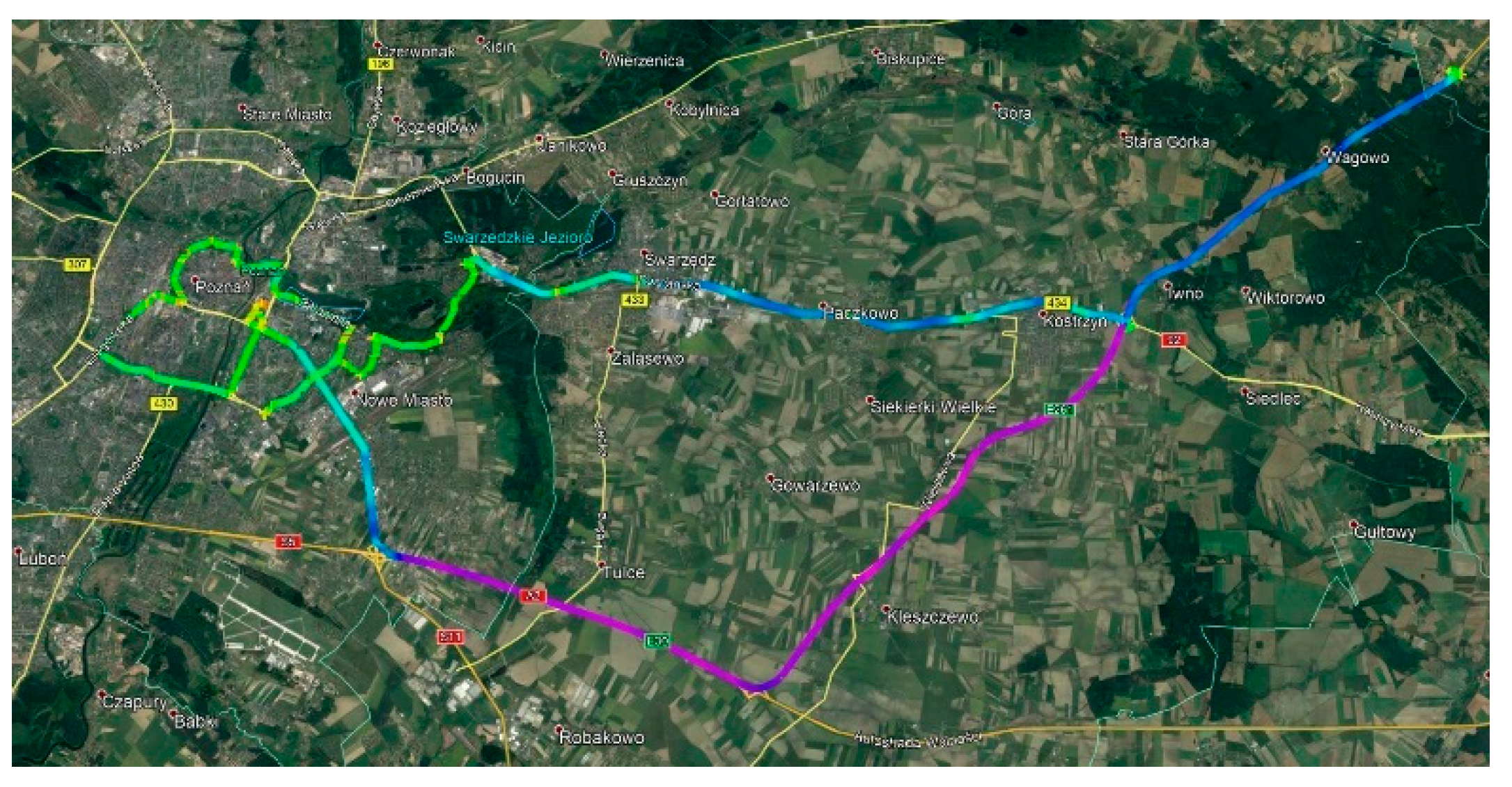
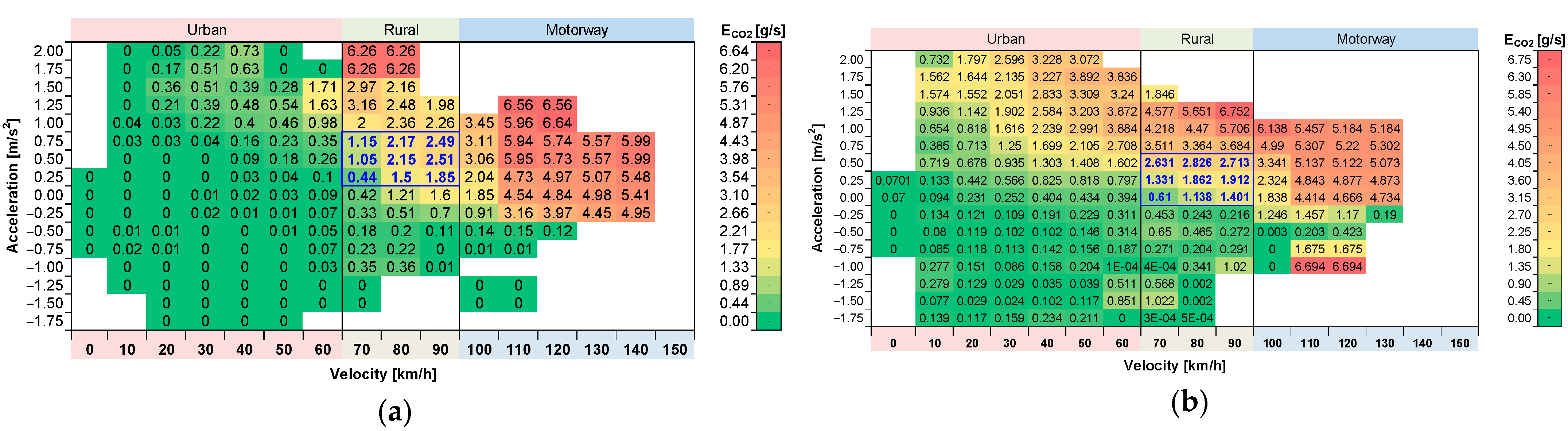
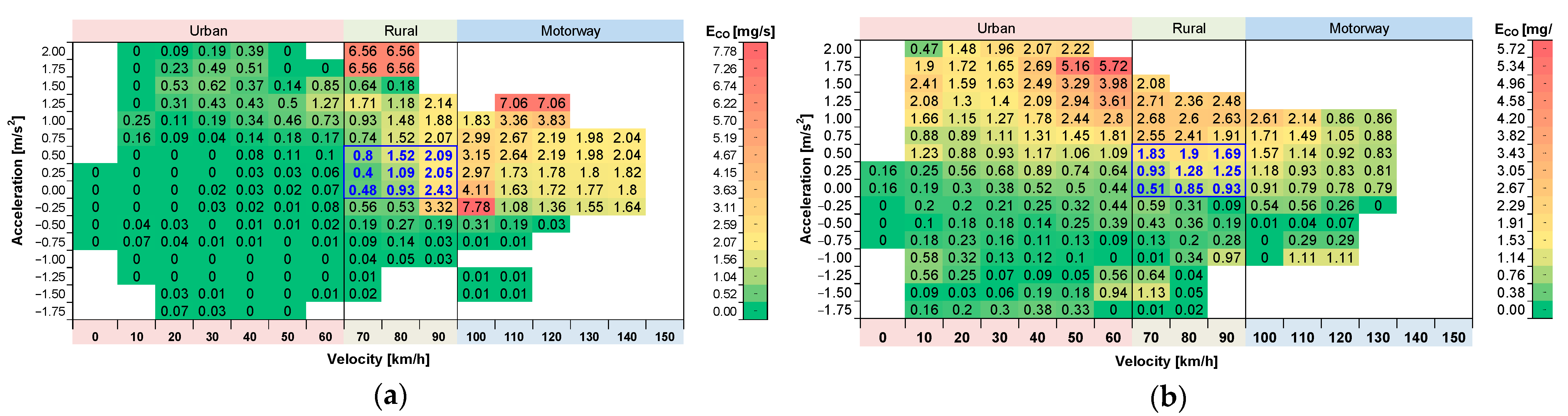
4.2. Real Driving Emission Tests
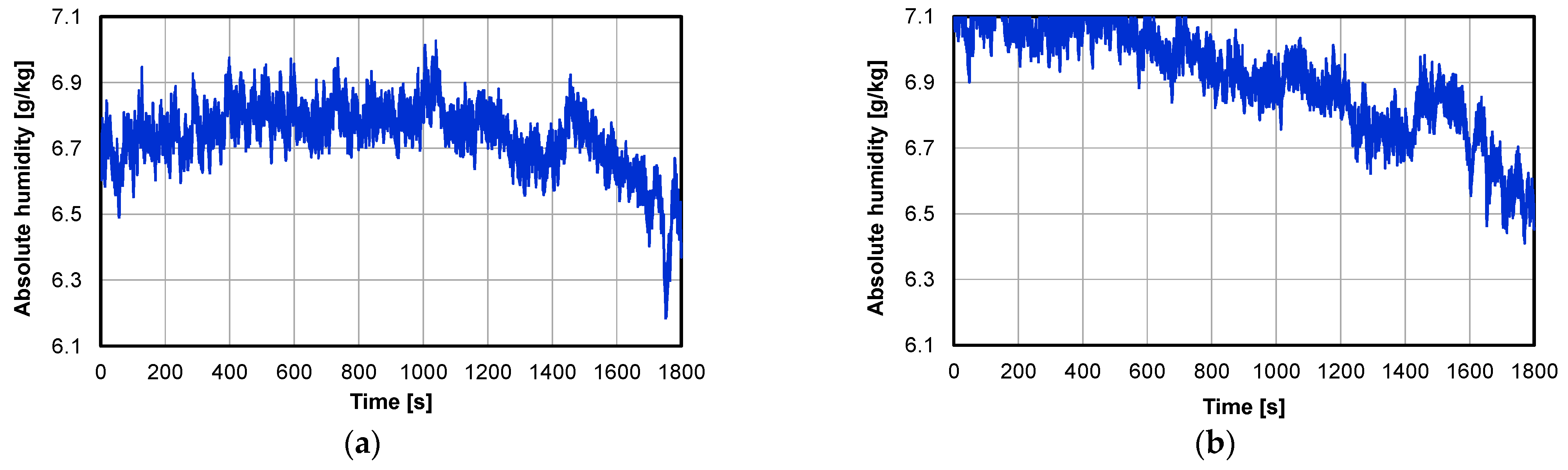
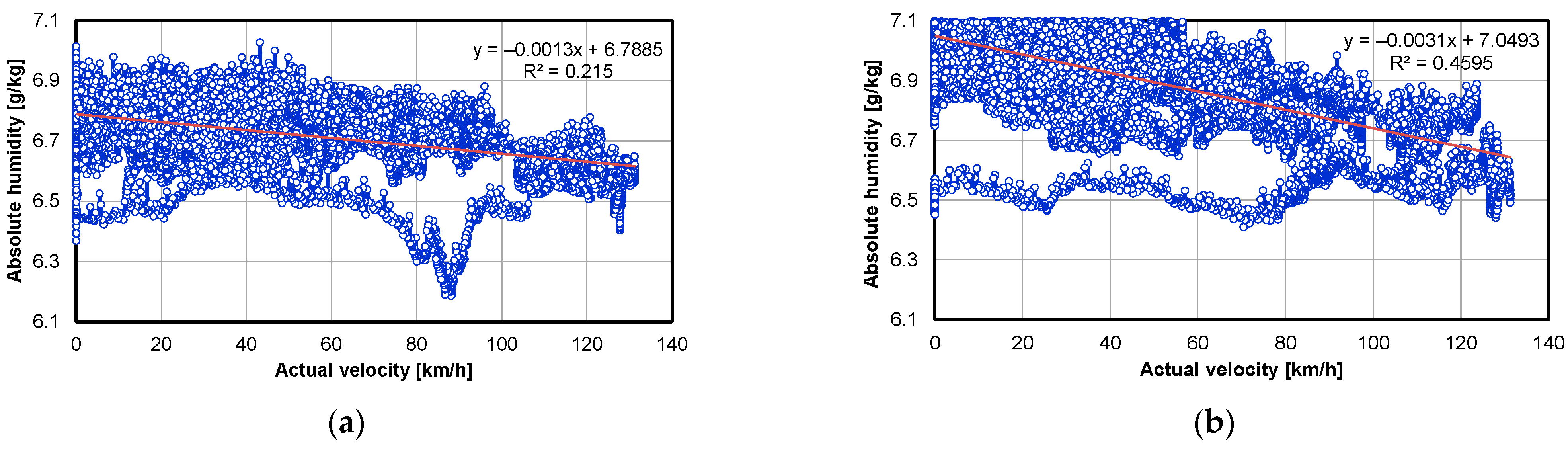
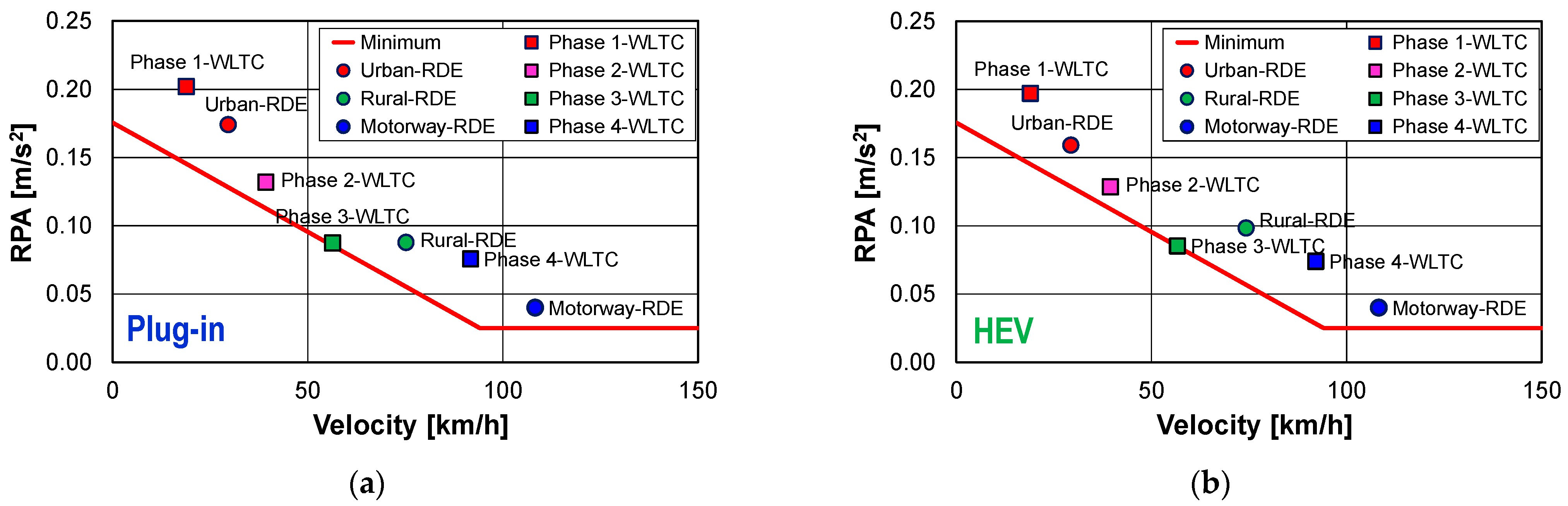
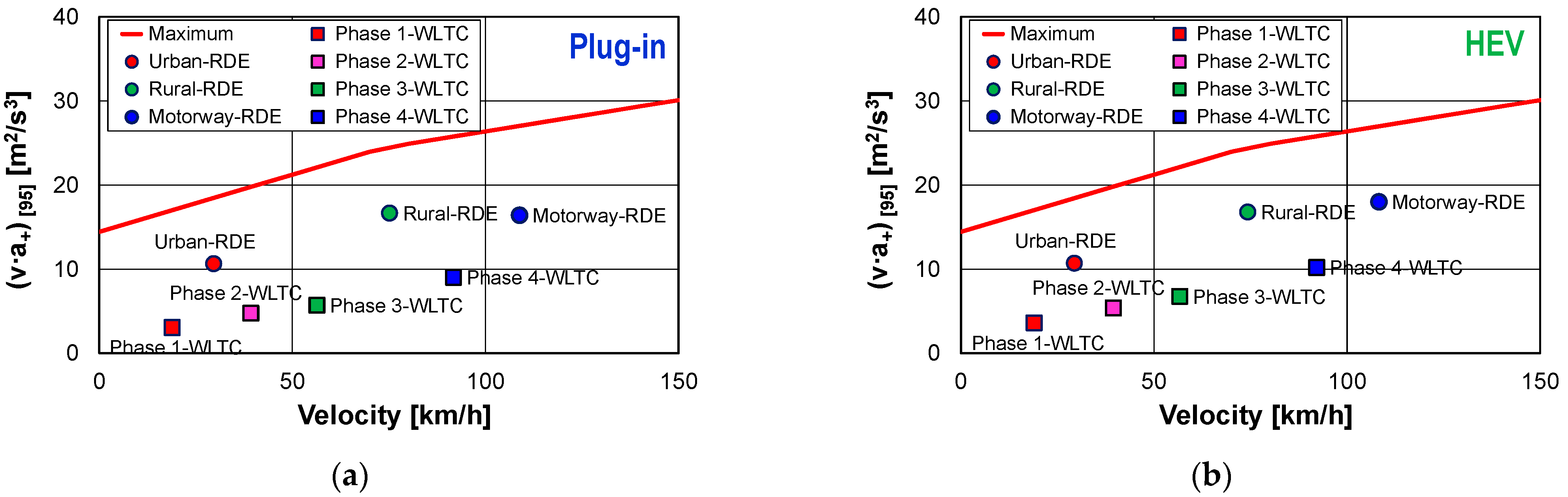
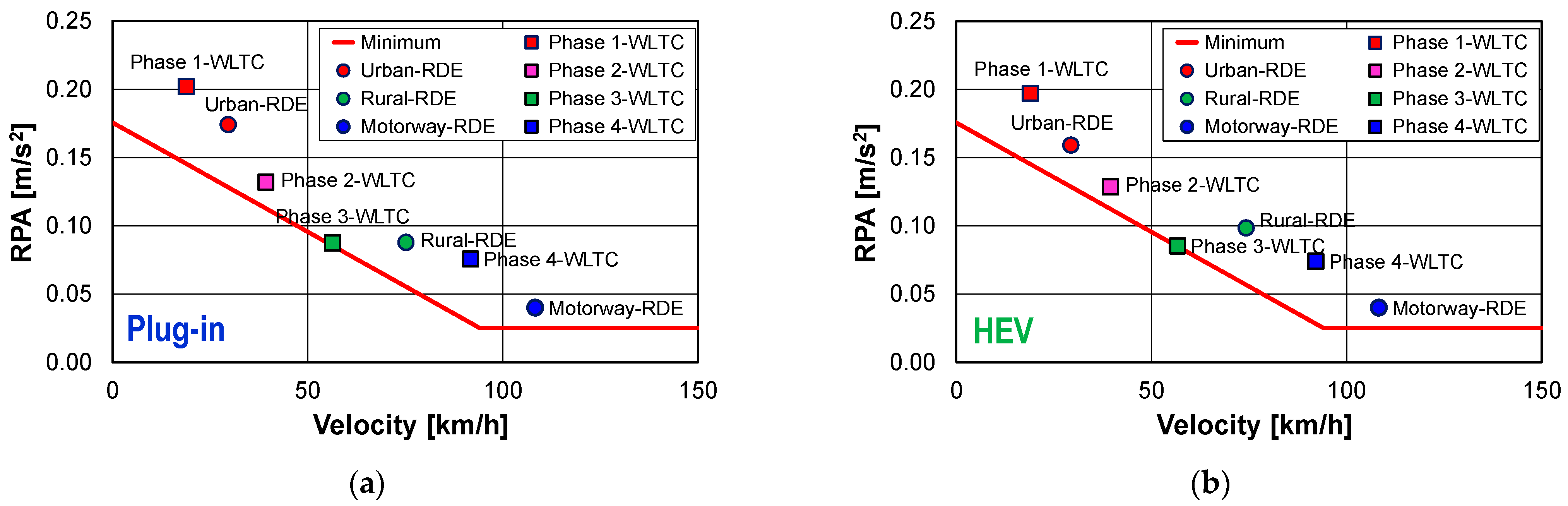
4.2.1. Verification of Test Feasibility Conditions
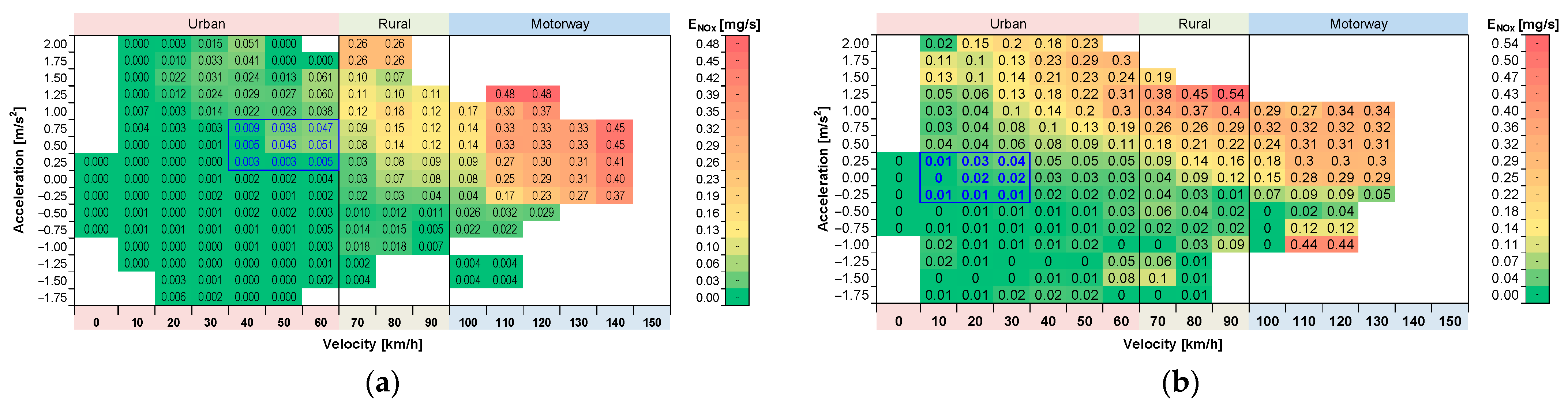
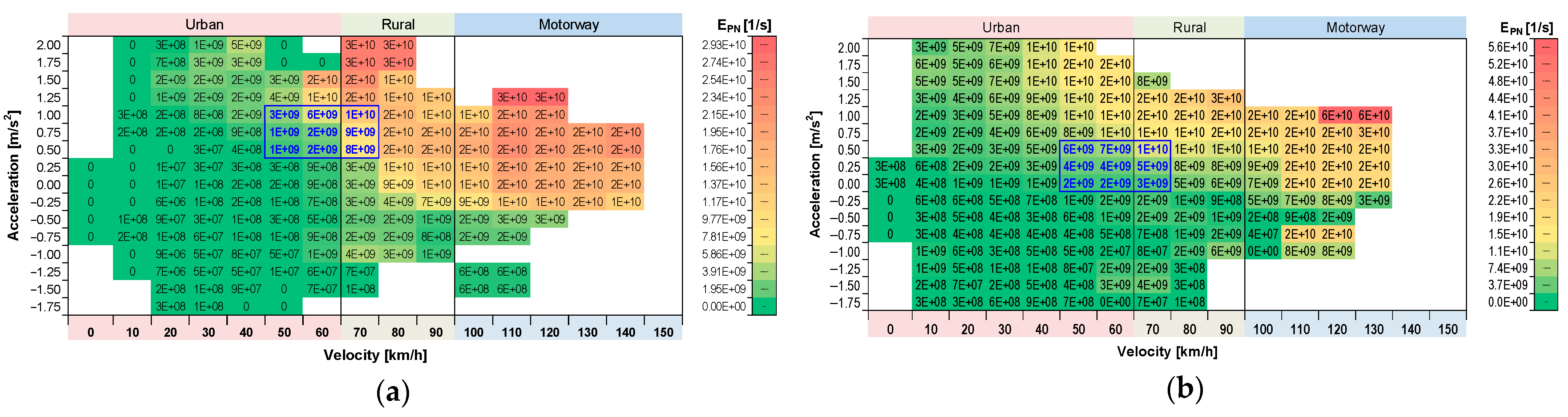
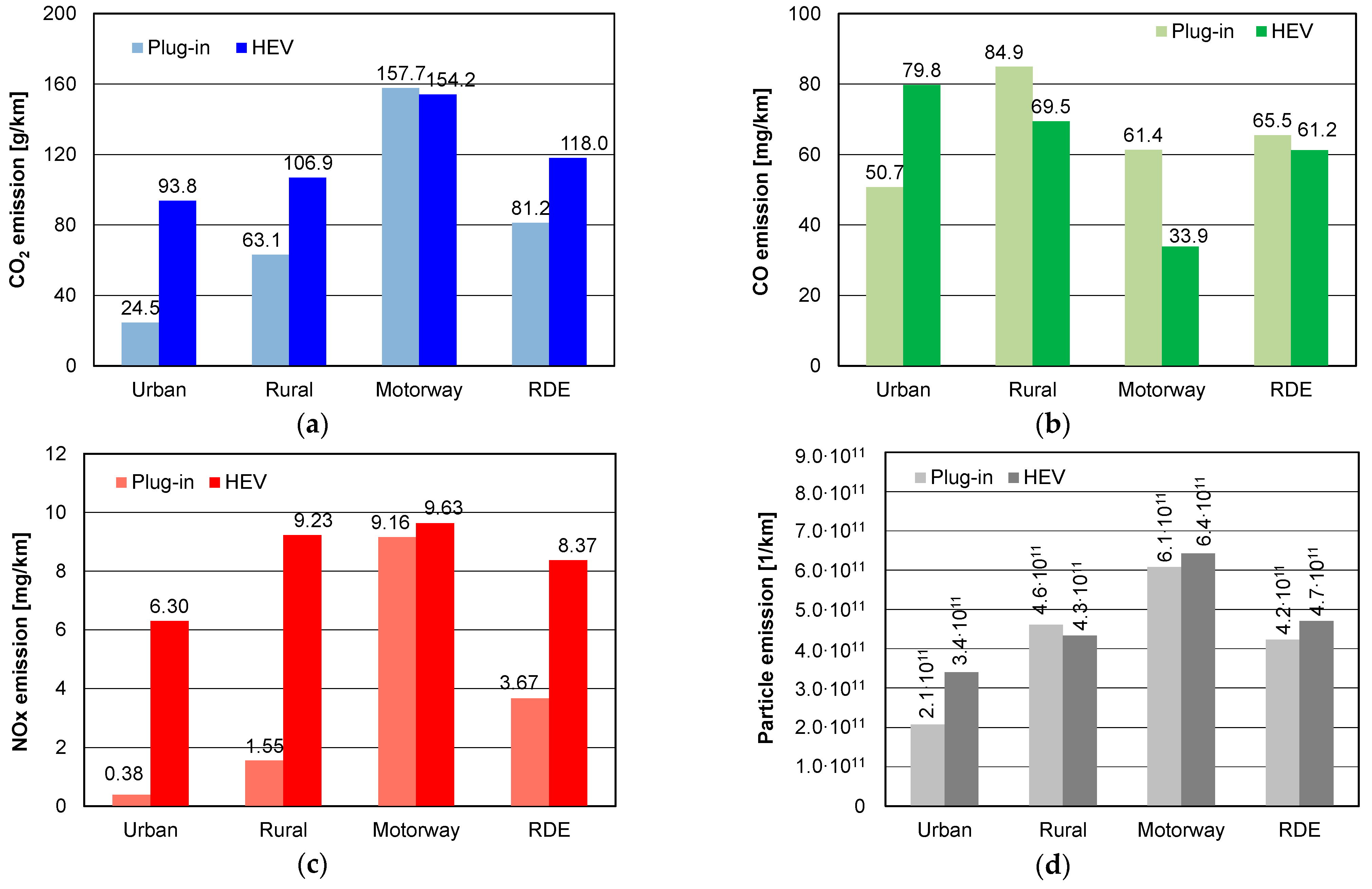
4.2.2. Comparison of Plug-in and HEV Vehicles under Road Test Conditions
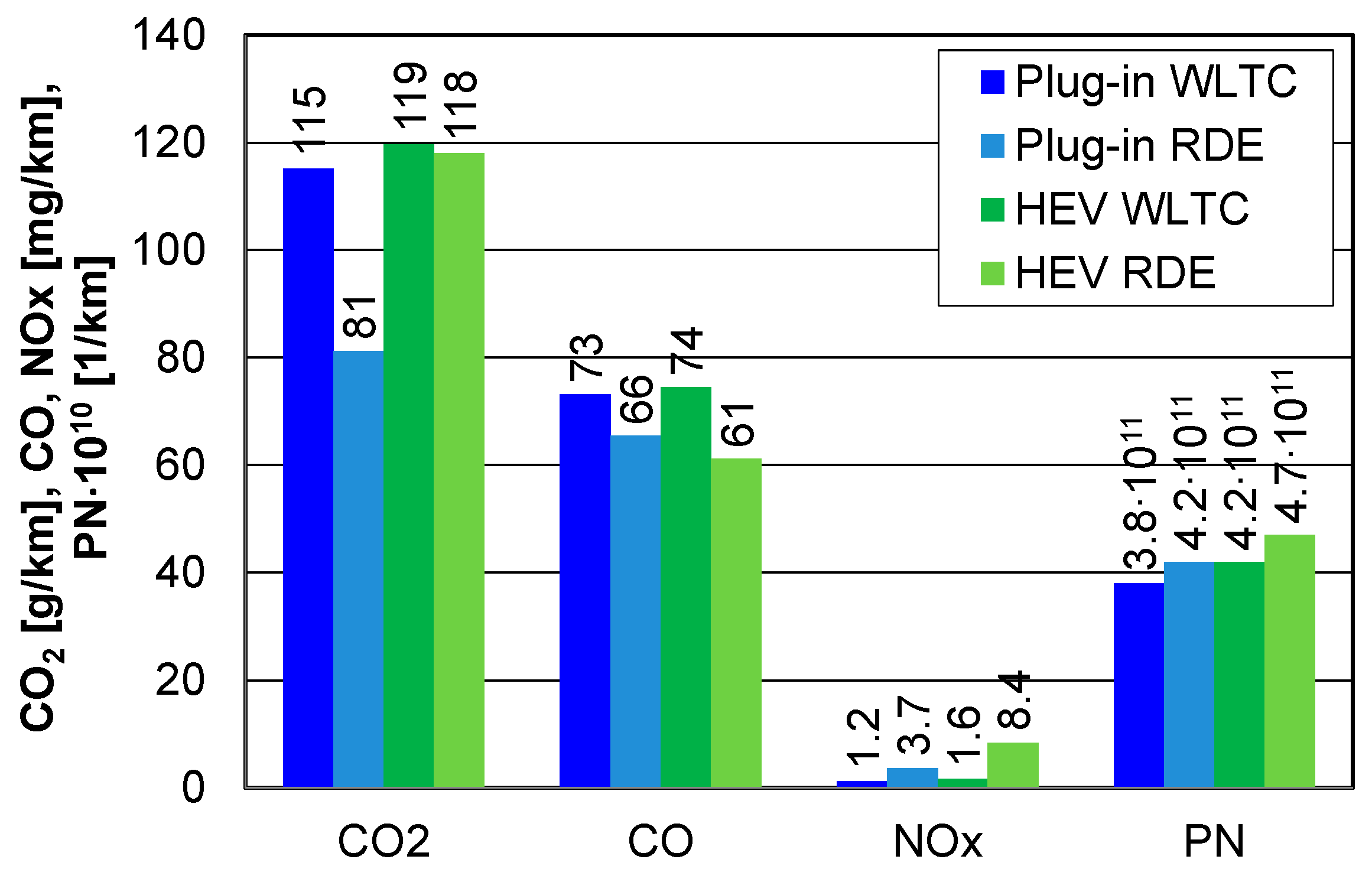
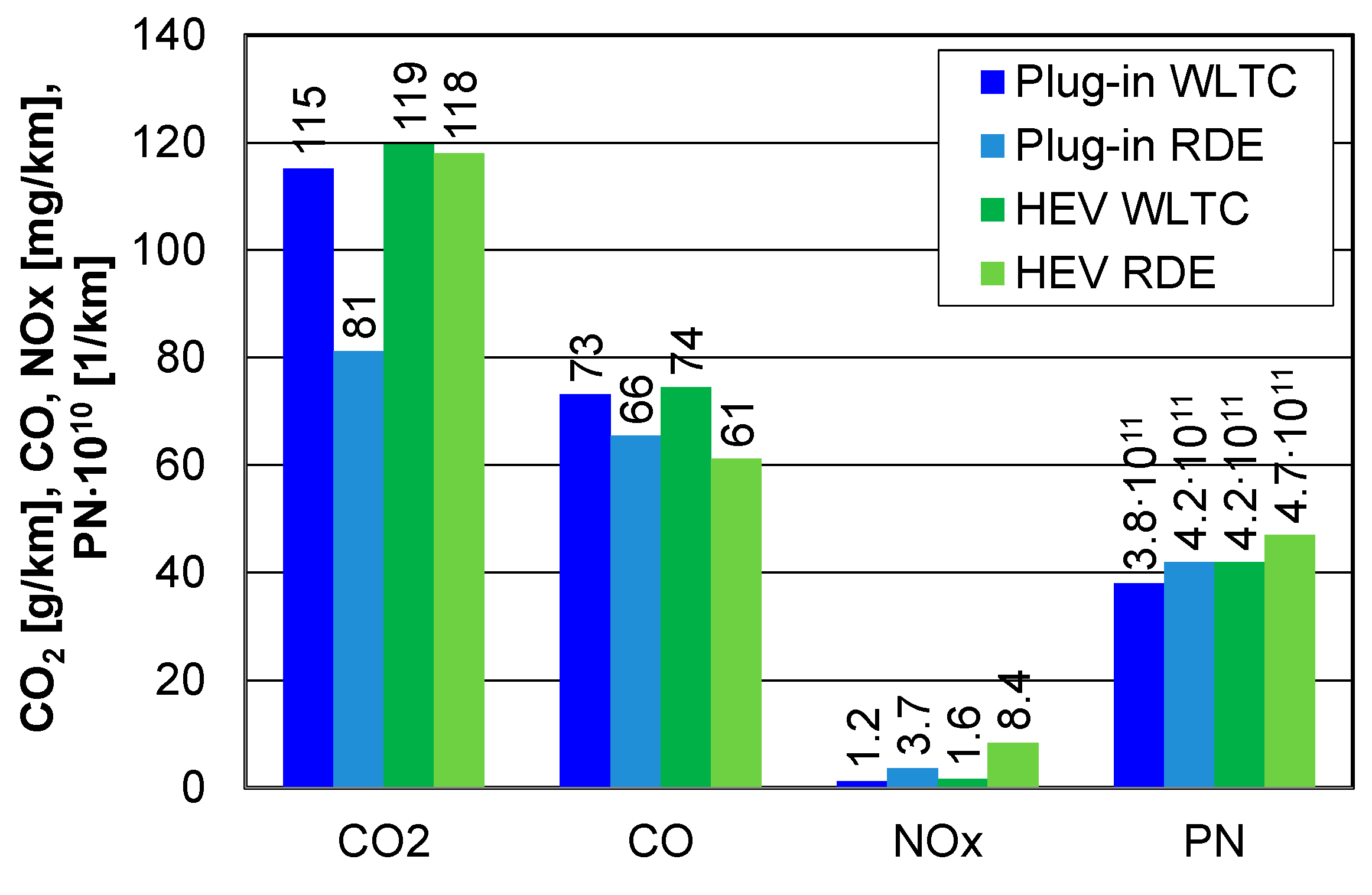
4.2.3. Comparison of Emission Results in the WLTC and RDE Test
5. Conclusions
- Performing WLTC tests with the assumption that the tests on a chassis dynamometer take place under repeatable conditions—the test results are transferable to other (similar) hybrid vehicles;
- In RDE, the conditions do not allow for free variation of the test conditions—the feasibility conditions must be fulfilled and the criteria defined by their acceptable ranges. The state of charge in plug-in vehicles is arbitrary. The initial state of charge will determine the test results, and the knowledge of the initial state of charge is often decisive for the economic operation of such vehicles—this issue has also been raised in other studies [92,93,94].
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| a | Acceleration Vehicle |
| b | Road Exhaust Emission |
| BEV | Battery Electric Vehicle |
| CF | Conformity Factor |
| E | Exhaust Emission Rate |
| EM | Electric Motor |
| EV | Electric Vehicle |
| FC | Fuel Consumption |
| GNG | Generalized Reduced Gradient |
| h | Driving Test Altitude |
| HEV | Hybrid Electric Vehicle |
| ICE | Internal Combustion Engines |
| M | Motorway |
| NEDC | New European Driving Cycle |
| PEMS | Portable Emission Measurement System |
| PHEV | Plug-in Hybrid Electric Vehicle |
| PN | Particle number |
| R | Rural |
| RDE | Real Driving Emissions |
| RPA | Relative Positive Acceleration |
| S | Distance |
| t | Time |
| u | Share |
| U | Urban |
| v | Vehicle Velocity |
| WLTC | Worldwide-harmonized Light duty Vehicles Test Cycle |
| WLTP | Worldwide-harmonized Light duty Vehicles Test Procedure |
References
- Hybrids Are 14 Times Better than Battery Electric Vehicles at Reducing Real-World Carbon Dioxide Emissions. Emissions Analytics Newsletter. 14 June 2019. Available online: https://www.emissionsanalytics.com/news/hybrids-are-better (accessed on 9 November 2021).
- Jung, H.; Li, C. Emissions from Plug-In Hybrid Electric Vehicle (PHEV) during Real World Driving Under Various Weather Conditions; UC Davis: National Center for Sustainable Transportation: Davis, CA, USA, 2018; Available online: https://escholarship.org/uc/item/0c4842fp (accessed on 15 November 2021).
- Wu, X.; Zhang, S.; Wu, Y.; Li, Z.; Ke, W.; Fu, L.; Hao, J. On-road Measurement of Gaseous Emissions and Fuel Consumption for Two Hybrid Electric Vehicles in Macao. Atmos. Pollut. Res. 2015, 6, 858–866. [Google Scholar] [CrossRef]
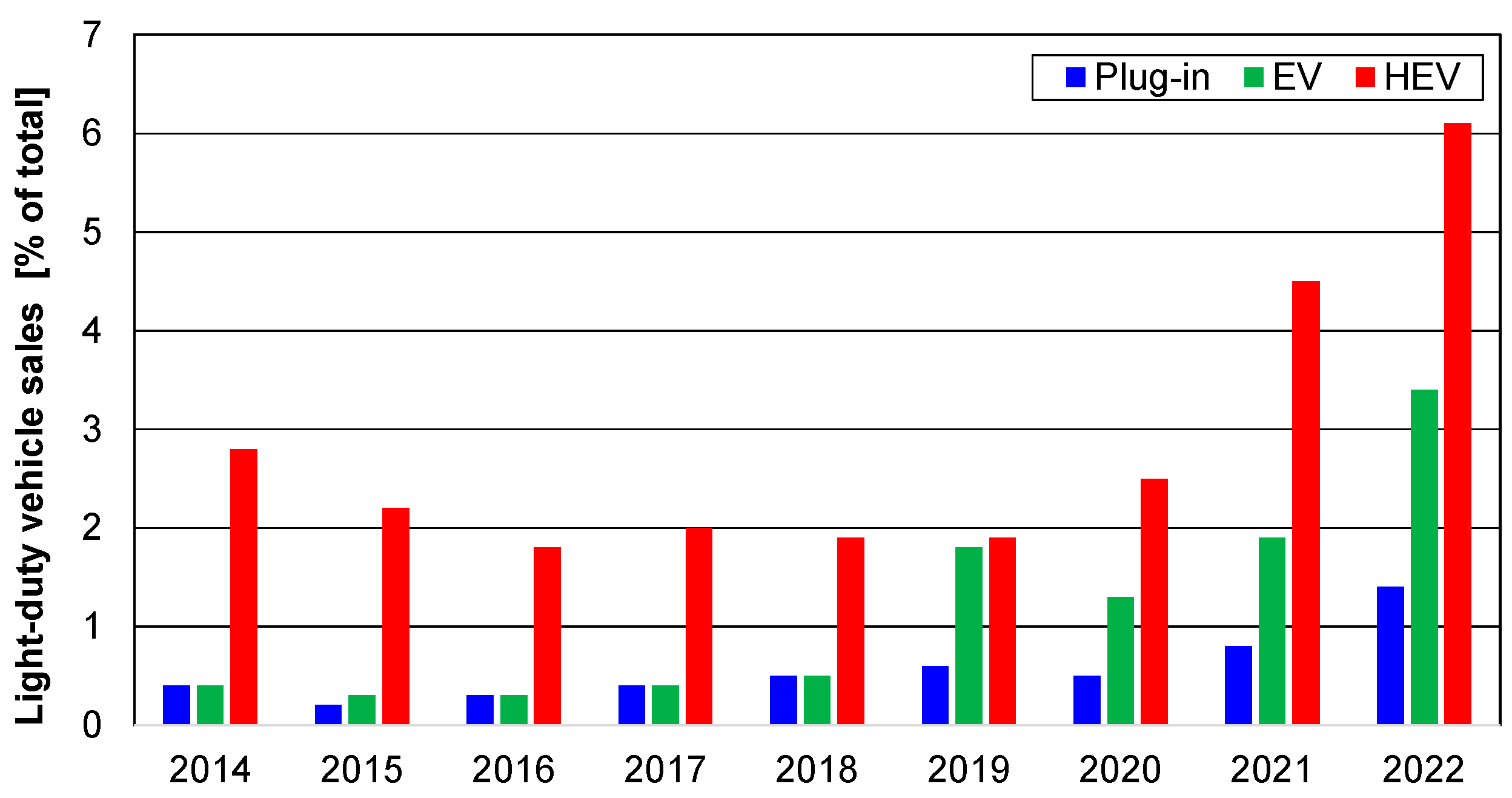
- Electric Vehicles and Hybrids Surpass 10% of U.S. Light-Duty Vehicle Sales. Today in Energy, U.S. Energy Information Administration. Available online: https://www.eia.gov/todayinenergy/detail.php?id=51218# (accessed on 8 March 2022).
- Pielecha, J.; Skobiej, K.; Kurtyka, K. Exhaust Emissions and Energy Consumption Analysis of Conventional, Hybrid, and Electric Vehicles in Real Driving Cycles. Energies 2020, 13, 6423. [Google Scholar] [CrossRef]
- Bielaczyc, P.; Merkisz, J.; Pielecha, J.; Woodburn, J. A Comparison of Gaseous Emissions from a Hybrid Vehicle and a Non-Hybrid Vehicle under Real Driving Conditions; Technical Paper 2018-01-1272; SAE International: Warrendale, PA, USA, 2018. [Google Scholar] [CrossRef]
- Greenwood, S. Hybrid Vehicles—A Simple Guide. Aathornton. September 2017. Available online: https://www.aathornton.com/hybrid-vehicles-simple-guide/ (accessed on 9 November 2021).
- Galassi, M.C.; Stutenberg, K.; Garcia Otura, M.; Trentadue, G.; Scholz, H.W.; Carriero, M. Electric and Hybrid Vehicle Testing: BMWi3 Performance Assessment in Realistic Use Scenarios; EUR 29035 EN, JRC109797; Publications Office of the European Union: Luxembourg, 2018. [Google Scholar] [CrossRef]
- Cieslik, W.; Szwajca, F.; Zawartowski, J.; Pietrzak, K.; Rosolski, S.; Szkarlat, K.; Rutkowski, M. Capabilities of Nearly Zero Energy Building (nZEB) Electricity Generation to Charge Electric Vehicle (EV) Operating in Real Driving Conditions (RDC). Energies 2021, 14, 7591. [Google Scholar] [CrossRef]
- Machado, P.G.; Teixeira, A.C.R.; de Almeida Collaço, F.M.; Hawkes, A.; Mouette, D. Assessment of Greenhouse Gases and Pollutant Emissions in the Road Freight Transport Sector: A Case Study for São Paulo State, Brazil. Energies 2020, 13, 5433. [Google Scholar] [CrossRef]
- Temporelli, A.; Carvalho, M.L.; Girardi, P. Life Cycle Assessment of Electric Vehicle Batteries: An Overview of Recent Literature. Energies 2020, 13, 2864. [Google Scholar] [CrossRef]
- Höltl, A.; Macharis, C.; de Brucker, K. Pathways to Decarbonise the European Car Fleet: A Scenario Analysis Using the Backcasting Approach. Energies 2018, 11, 20. [Google Scholar] [CrossRef] [Green Version]
- Palencia, J.C.G.; Nguyen, V.T.; Araki, M.; Shiga, S. The Role of Powertrain Electrification in Achieving Deep Decarbonization in Road Freight Transport. Energies 2020, 13, 2459. [Google Scholar] [CrossRef]
- Fulton, L. A Publicly Available Simulation of Battery Electric, Hybrid Electric, and Gas-Powered Vehicles. Energies 2020, 13, 2569. [Google Scholar] [CrossRef]
- Zhuang, W.; Zhang, X.; Peng, H.; Wang, L. Simultaneous Optimization of Topology and Component Sizes for Double Planetary Gear Hybrid Powertrains. Energies 2016, 9, 411. [Google Scholar] [CrossRef]
- Pielecha, I.; Cieslik, W.; Szalek, A. Impact of Combustion Engine Operating Conditions on Energy Flow in Hybrid Drives in RDC Tests; Technical Paper 2020-01-2251; SAE International: Warrendale, PA, USA, 2020. [Google Scholar] [CrossRef]
- Folkson, R. Alternative Fuels and Advanced Vehicle Technologies for Improved Environmental Performance: Towards Zero Carbon Transportation; Woodhead Publishing Limited: Cambridge, UK, 2014. [Google Scholar] [CrossRef]
- Shen, C.; Shan, P.; Gao, T. A Comprehensive Overview of Hybrid Electric Vehicles. Int. J. Veh. Technol. 2011, 2011, 571683. [Google Scholar] [CrossRef]
- Li, P.; Yan, J.; Tu, Q.; Pan, M.; Xue, J. A Novel Energy Management Strategy for Series Hybrid Electric Rescue Vehicle. Math. Probl. Eng. 2018, 2018, 8450213. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.; Liu, Y. Energy Management Strategy for Plug-In Hybrid Electric Vehicles Based on Driving Condition Recognition: A Review. Electronics 2022, 11, 342. [Google Scholar] [CrossRef]
- Vu, T.M.; Moezzi, R.; Cyrus, J.; Hlava, J.; Petru, M. Parallel Hybrid Electric Vehicle Modelling and Model Predictive Control. Appl. Sci. 2021, 11, 10668. [Google Scholar] [CrossRef]
- Chen, P.-T.; Yang, C.-J.; Huang, K.D. Dynamic Simulation and Control of a New Parallel Hybrid Power System. Appl. Sci. 2020, 10, 5467. [Google Scholar] [CrossRef]
- Fu, Z.; Wang, B.; Song, X.; Liu, L.; Wang, X. Power-Split Hybrid Electric Vehicle Energy Management Based on Improved Logic Threshold Approach. Math. Probl. Eng. 2013, 2013, 840648. [Google Scholar] [CrossRef]
- Nazari, S.; Siegel, J.; Middleton, R.; Stefanopoulou, A. Power Split Supercharging: A Mild Hybrid Approach to Boost Fuel Economy. Energies 2020, 13, 6580. [Google Scholar] [CrossRef]
- Bonfiglio, A.; Lanzarotto, D.; Marchesoni, M.; Passalacqua, M.; Procopio, R.; Repetto, M. Electrical-Loss Analysis of Power-Split Hybrid Electric Vehicles. Energies 2017, 10, 2142. [Google Scholar] [CrossRef] [Green Version]
- Son, H.; Park, K.; Hwang, S.; Kim, H. Design Methodology of a Power Split Type Plug-In Hybrid Electric Vehicle Considering Drivetrain Losses. Energies 2017, 10, 437. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Hu, H.; Wu, Y.; Xiao, R.; Shen, J.; Liu, Y. Energy Management for a Power-Split Plug-In Hybrid Electric Vehicle Based on Reinforcement Learning. Appl. Sci. 2018, 8, 2494. [Google Scholar] [CrossRef] [Green Version]
- Dinh, T.Q.; Marco, J.; Niu, H.; Greenwood, D.; Harper, L.; Corrochano, D. A Novel Method for Idle-Stop-Start Control of Micro Hybrid Construction Equipment—Part A: Fundamental Concepts and Design. Energies 2017, 10, 962. [Google Scholar] [CrossRef] [Green Version]
- Capata, R.; Sciubba, E. Study, Development and Prototyping of a Novel Mild Hybrid Power Train for a City Car: Design of the Turbocharger. Appl. Sci. 2021, 11, 234. [Google Scholar] [CrossRef]
- Benevieri, A.; Carbone, L.; Cosso, S.; Kumar, K.; Marchesoni, M.; Passalacqua, M.; Vaccaro, L. Series Architecture on Hybrid Electric Vehicles: A Review. Energies 2021, 14, 7672. [Google Scholar] [CrossRef]
- León, R.; Montaleza, C.; Maldonado, J.L.; Tostado-Véliz, M.; Jurado, F. Hybrid Electric Vehicles: A Review of Existing Configurations and Thermodynamic Cycles. Thermo 2021, 1, 134–150. [Google Scholar] [CrossRef]
- Koreny, M.; Simonik, P.; Klein, T.; Mrovec, T.; Ligori, J.J. Hybrid Research Platform for Fundamental and Empirical Modeling and Analysis of Energy Management of Shared Electric Vehicles. Energies 2022, 15, 1300. [Google Scholar] [CrossRef]
- Mierlo, J.V. Special Issue “Plug-In Hybrid Electric Vehicle (PHEV)”. Appl. Sci. 2019, 9, 2829. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.; Choi, J.; Jeong, K.; Kim, H. A Study of Fuel Economy Improvement in a Plug-in Hybrid Electric Vehicle using Engine on/off and Battery Charging Power Control Based on Driver Characteristics. Energies 2015, 8, 10106–10126. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Ali, K.; Roeleveld, J.; Emadi, A. State-of-the-art Electrified Powertrains-Hybrid, Plug-in, and Electric Vehicles. Int. J. Powertrains 2016, 5, 1. [Google Scholar] [CrossRef]
- What Is a Hybrid Car and How Do They Work? Car and Driver. 2019. Available online: https://www.caranddriver.com/features/a26390899/what-is-hybrid-car/ (accessed on 9 November 2021).
- Oleksowicz, S.; Burnham, K. Assessment of Hybrid Vehicle Braking Technologies. Mech. Tech. Trans. 2012, 109, 157–168. [Google Scholar]
- Duoba, M.; Anderson, J.; Ng, H. Issues in Emissions Testing of Hybrid Electric Vehicles; Argonne National Laboratory: Du Page County, IL, USA, 2000; Available online: https://digital.library.unt.edu/ark:/67531/metadc705904/ (accessed on 28 October 2021).
- WLTP Facts. Available online: https://www.wltpfacts.eu/what-is-wltp-how-will-it-work/ (accessed on 9 November 2021).
- Fly, A. Are Plug-in Hybrid Cars Worse for Environment than Factory Tests Suggest? It depends how you drive them. The Conversation. 21 September 2020. Available online: https://theconversation.com/are-Plug-in-hybrid-cars-worse-for-environment-than-factory-tests-suggest-it-depends-how-you-drive-them-146598 (accessed on 19 November 2021).
- Marignetti, F.; D’Aguanno, D.; Volpe, G. Design and Experiments of a Test Equipment for Hybrid and Electric Vehicle Drivetrains. In Proceedings of the 2017 Twelfth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 11–13 April 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Figenbaum, E.; Weber, C. Experimental Testing of Plug-In Hybrid Vehicles. CO2-Emission, Energy Consumption and Local Pollution; TØI Report 1539/2016; Norwegian Centre for Transport Research, Institute of Transport Economics: Oslo, Norway, 2016. [Google Scholar]
- Cubito, C.; Millo, F.; Boccardo, G.; Di Pierro, G.; Ciuffo, B.; Fontaras, G.; Serra, S.; Otura Garcia, M.; Trentadue, G. Impact of Different Driving Cycles and Operating Conditions on CO2 Emissions and Energy Management Strategies of a Euro-6 Hybrid Electric Vehicle. Energies 2017, 10, 1590. [Google Scholar] [CrossRef]
- Cheng, Y.-H.; Lai, C.-M. Control Strategy Optimization for Parallel Hybrid Electric Vehicles Using a Memetic Algorithm. Energies 2017, 10, 305. [Google Scholar] [CrossRef] [Green Version]
- Francfort, J.E.; Slezak, L.A. Electric and Hybrid Vehicle Testing; Technical Paper 2002-01-1916; SAE International: Warrendale, PA, USA, 2002. [Google Scholar] [CrossRef] [Green Version]
- Karner, D.; Francfort, J. Hybrid and Plug-in Hybrid Electric Vehicle Performance Testing by the US Department of Energy Advanced Vehicle Testing Activity. J. Power Sources 2007, 174, 69–75. [Google Scholar] [CrossRef]
- Espig, M.; Stapelbroek, M.; Zander, R.; Glados, F. FEV Hybrid System. Benchmarking. Synergetic Testing, Simulation and Design Assessment. Spectr. FEV Cust. Mag. 2017, 62, 12–19. [Google Scholar]
- Li, Z.; Deng, Y.; Xin, J.; Xiong, X.; Xu, P.; Li, Z.; Jin, W. Research of the Hybrid Power Train Dynamic Test System. World Electr. Veh. J. 2010, 4, 635–641. [Google Scholar] [CrossRef] [Green Version]
- Demuynck, J.; Favre, C.; Bosteels, D.; Andersson, J.; Jemma, C.; de Vries, S. Real Driving Emissions from a Gasoline Plug-in Hybrid Vehicle with and without a Gasoline Particulate Filter. AVL International Gas and Particulate Emissions Forum, Ludwigsburg. 2018. Available online: https://www.aecc.eu/wp-content/uploads/2020/07/180221-AECC-Real-Driving-Emissions-from-a-Gasoline-Plug-in-Hybrid-AVL-Forum.pdf (accessed on 15 January 2022).
- Campino, M.; Henriques, N.; Duarte, G. Energy Assessment of a Plug-in Hybrid Vehicle Propulsion Management System. KnE Eng. 2020, 5, 833–845. [Google Scholar] [CrossRef]
- Nazir, M.S.; Ahmad, I.; Khan, M.J.; Ayaz, Y.; Armghan, H. Adaptive Control of Fuel Cell and Supercapacitor Based Hybrid Electric Vehicles. Energies 2020, 13, 5587. [Google Scholar] [CrossRef]
- Nguyễn, B.-H.; Trovão, J.P.F.; German, R.; Bouscayrol, A. Real-Time Energy Management of Parallel Hybrid Electric Vehicles Using Linear Quadratic Regulation. Energies 2020, 13, 5538. [Google Scholar] [CrossRef]
- Wu, W.; Partridge, J.; Bucknall, R. Development and Evaluation of a Degree of Hybridisation Identification Strategy for a Fuel Cell Supercapacitor Hybrid Bus. Energies 2019, 12, 142. [Google Scholar] [CrossRef] [Green Version]
- Capata, R. Urban and Extra-Urban Hybrid Vehicles: A Technological Review. Energies 2018, 11, 2924. [Google Scholar] [CrossRef] [Green Version]
- Solouk, A.; Shahbakhti, M. Energy Optimization and Fuel Economy Investigation of a Series Hybrid Electric Vehicle Integrated with Diesel/RCCI Engines. Energies 2016, 9, 1020. [Google Scholar] [CrossRef] [Green Version]
- Mocera, F.; Somà, A. Analysis of a Parallel Hybrid Electric Tractor for Agricultural Applications. Energies 2020, 13, 3055. [Google Scholar] [CrossRef]
- Karabasoglu, O.; Michalek, J. Influence of Driving Patterns on Lifecycle Cost and Emissions of Hybrid and Plug-in Electric Vehicle. Energy Policy 2013, 60, 445–461. [Google Scholar] [CrossRef]
- UK Briefing: The Plug-In Hybrid Con. On the 5th Anniversary of Diesel Gate Car Makers New Cheats Exposed; Transport & Environment: Brussels, Belgium, September 2020.
- Tong, F.; Jaramillo, P.; Azevedo, I.M.L. Comparison of Life Cycle Greenhouse Gases from Natural Gas Pathways for Light-Duty Vehicles. Energy Fuels 2015, 29, 6008–6018. [Google Scholar] [CrossRef]
- Westbrook, M.H. The Electric and Hybrid Electric Car; SAE: London, UK, 2001. [Google Scholar]
- Wipke, K.; Cuddy, M.; Burch, S. ADVISOR 2.1: A User-Friendly Advanced Powertrain Simulation Using a Combined Backward/Forward Approach; National Renewable Research Laboratory: Golden, CO, USA, 1999; NREL/JA-540-26839. [Google Scholar]
- Aceves, S.M.; Smith, J.R. A Hybrid Vehicle Evaluation Code and Its Application to Vehicle Design; Technical Paper 950491; SAE International: Warrendale, PA, USA, 1995. [Google Scholar]
- Cuddy, M. A Comparison of Modelled and Measured Energy Use in Hybrid Electric Vehicles; Technical Paper 950959; SAE International: Warrendale, PA, USA, 1995. [Google Scholar]
- Cole, G.H. SIMPLEV: A Simple Electric Vehicle Simulation Program; Version 2.0; EG&G Idaho Inc.: Idaho Falls, ID, USA, 1993. [Google Scholar]
- Braun, C.; Busse, D. A Modular Simulink Model for Hybrid Electric Vehicles; Technical Paper 961659; SAE International: Warrendale, PA, USA, 1996. [Google Scholar]
- Butler, K.; Stevens, K.; Ehsani, M. A Versatile Computer Simulation Tool for Design and Analysis of Electric and Hybrid Drive Trains; Technical Paper 970199; SAE International: Warrendale, PA, USA, 1997. [Google Scholar]
- Taymaz, I.; Benli, M. Emissions and Fuel Economy for a Hybrid Vehicle. Fuel 2014, 115, 812–817. [Google Scholar] [CrossRef]
- Schouten, N.J.; Salman, M.A.; Kheir, N.A. Fuzzy Logic Control for Parallel Hybrid Vehicles. IEEE Trans. Control Syst. Technol. 2002, 10, 460–468. [Google Scholar] [CrossRef]
- Schouten, N.J.; Salman, M.A.; Kheir, N.A. Energy Management Strategies for Parallel Hybrid Vehicles Using Fuzzy Logic. Int. Fed. Autom. Control IFAC J. Control Eng. Prac. 2003, 11, 171–177. [Google Scholar] [CrossRef]
- Kheir, N.A.; Salman, M.A.; Schouten, N.J. Emissions and Fuel Economy Trade-Off for hybrid Vehicles Using Fuzzy Logic. Math. Comput. Simul. 2004, 66, 155–172. [Google Scholar] [CrossRef]
- Orecchini, F.; Santiangeli, A.; Zuccari, F. Real Drive Well-to-Wheel Energy Analysis of Conventional and Electrified Car Powertrains. Energies 2020, 13, 4788. [Google Scholar] [CrossRef]
- Capata, R.; Tatti, F. Designing, Prototyping, Assembling and Costs Analysis of a Gas Turbine Hybrid Vehicle. Energies 2020, 13, 4611. [Google Scholar] [CrossRef]
- Shivappriya, S.N.; Karthikeyan, S.; Prabu, S.; de Prado, R.P.; Parameshachari, B.D. A Modified ABC-SQP-Based Combined Approach for the Optimization of a Parallel Hybrid Electric Vehicle. Energies 2020, 13, 4529. [Google Scholar] [CrossRef]
- Qiao, Y.; Song, Y.; Huang, K. A Novel Control Algorithm Design for Hybrid Electric Vehicles Considering Energy Consumption and Emission Performance. Energies 2019, 12, 2698. [Google Scholar] [CrossRef] [Green Version]
- Bozza, F.; de Bellis, V.; Malfi, E.; Teodosio, L.; Tufano, D. Optimal Calibration Strategy of a Hybrid Electric Vehicle Equipped with an Ultra-Lean Pre-Chamber SI Engine for the Minimization of CO2 and Pollutant Emissions. Energies 2020, 13, 4008. [Google Scholar] [CrossRef]
- Frey, H.C.; Zheng, X.; Hu, J. Variability in Measured Real-World Operational Energy Use and Emission Rates of a Plug-In Hybrid Electric Vehicle. Energies 2020, 13, 1140. [Google Scholar] [CrossRef] [Green Version]
- Konečný, V.; Gnap, J.; Settey, T.; Petro, F.; Skrúcaný, T.; Figlus, T. Environmental Sustainability of the Vehicle Fleet Change in Public City Transport of Selected City in Central Europe. Energies 2020, 13, 3869. [Google Scholar] [CrossRef]
- Xiong, S.; Ji, J.; Ma, X. Comparative Life Cycle Energy and GHG Emission Analysis for BEVs and PHEVs: A Case Study in China. Energies 2019, 12, 834. [Google Scholar] [CrossRef] [Green Version]
- Finesso, R.; Misul, D.; Spessa, E.; Venditti, M. Optimal Design of Power-Split HEVs Based on Total Cost of Ownership and CO2 Emission Minimization. Energies 2018, 11, 1705. [Google Scholar] [CrossRef] [Green Version]
- Lehtoranta, K.; Murtonen, T.; Vesala, H.; Koponen, P.; Piimäkorpi, P.; Isotalo, M.; Alanen, J.; Kuittinen, N.; Rönkkö, T.; Saarikoski, S. New Technologies for Gas Combustion Emissions: Final Report; VTT Research Report No. VTT-R-00482-19; VTT Technical Research Centre of Finland: Espoo, Finland, 2019. [Google Scholar]
- Feinauer, M.; Ehrenberger, S.; Epple, F.; Schripp, T.; Grein, T. Investigating Particulate and Nitrogen Oxides Emissions of a Plug-In Hybrid Electric Vehicle for a Real-World Driving Scenario. Appl. Sci. 2022, 12, 1404. [Google Scholar] [CrossRef]
- Kazemzadeh, E.; Koengkan, M.; Fuinhas, J.A. Effect of Battery-Electric and Plug-In Hybrid Electric Vehicles on PM2.5 Emissions in 29 European Countries. Sustainability 2022, 14, 2188. [Google Scholar] [CrossRef]
- Jung, H. Fuel Economy of Plug-In Hybrid Electric and Hybrid Electric Vehicles: Effects of Vehicle Weight, Hybridization Ratio and Ambient Temperature. World Electr. Veh. J. 2020, 11, 31. [Google Scholar] [CrossRef] [Green Version]
- Wróblewski, P.; Kupiec, J.; Drożdż, W.; Lewicki, W.; Jaworski, J. The Economic Aspect of Using Different Plug-In Hybrid Driving Techniques in Urban Conditions. Energies 2021, 14, 3543. [Google Scholar] [CrossRef]
- The New Corolla Model Range. February 2019. Available online: https://newsroom.toyota.eu/2019-the-toyota-corolla/ (accessed on 15 January 2022).
- European Union. Commission Regulation (EU) 2016/427 of 10 March 2016 amending Regulation (EC) No. 692/2008 as regards emissions from light passenger and commercial vehicles (Euro 6), Verifying Real Driving Emissions. Off. J. Eur. Union 2016, L 82, 1–98. Available online: http://data.europa.eu/eli/reg/2016/427/oj (accessed on 20 January 2022).
- European Union. Commission Regulation (EU) 2016/646 of 20 April 2016 amending Regulation (EC) No. 692/2008 as regards emissions from light passenger and commercial vehicles (Euro 6), Verifying Real Driving Emissions. Off. J. Eur. Union 2016, L 109, 1–22. Available online: http://data.europa.eu/eli/reg/2016/646/oj (accessed on 20 January 2022).
- European Union. Commission Regulation (EU) 2017/1154 of 7 June 2017 amending Regulation (EU) 2017/1151 supplementing Regulation (EC) No 715/2007 of the European Parliament and of the Council on type-approval of motor vehicles with respect to emissions from light passenger and commercial vehicles (Euro 5 and Euro 6) and on access to vehicle repair and maintenance information, amending Directive 2007/46/EC of the European Parliament and of the Council, Commission Regulation (EC) No 692/2008 and Commission Regulation (EU) No 1230/2012 and repealing Regulation (EC) No 692/2008 and Directive 2007/46/EC of the European Parliament and of the Council as regards real-driving emissions from light passenger and commercial vehicles (Euro 6). Off. J. Eur. Union 2017, L 175, 708–732. Available online: http://data.europa.eu/eli/reg/2017/1154/oj (accessed on 20 January 2022).
- Pielecha, J.; Gis, M. The use of the mild Hybrid System in Vehicles with Regard to Exhaust Emissions and their Environmental Impact. Arch. Transp. 2020, 55, 41–50. [Google Scholar] [CrossRef]
- Costagliola, M.A.; Prati, M.V.; Mariani, A.; Unich, A.; Morrone, B. Gaseous and Particulate Exhaust Emissions of Hybrid and Conventional Cars over Legislative and Real Driving Cycles. Energy Power Eng. 2015, 7, 181–192. [Google Scholar] [CrossRef] [Green Version]
- Skobiej, K.; Pielecha, J. Plug-in hybrid ecological category in real driving emission. Energies 2021, 14, 2340. [Google Scholar] [CrossRef]
- Prati, M.V.; Costagliola, M.A.; Giuzio, R.; Corsetti, C.; Beatrice, C. Emissions and Energy Consumption of a Plug-in Hybrid Passenger Car in Real Driving Emission (RDE) Test. Transp. Eng. 2021, 4, 100069. [Google Scholar] [CrossRef]
- Krajinska, A. Plug-in Hybrids: In Europe Heading for a New Dieselgate? Transport & Environment, European Federation for Transport and Environment AISBL: Brussels, Belgium, 2020. [Google Scholar]
- Anselma, P.G.; Kollmeyer, P.; Lempert, J.; Zhao, Z.; Belingardi, G.; Emadi, A. Battery State-of-health Sensitive Energy Management of Hybrid Electric Vehicles: Lifetime Prediction and Ageing Experimental Validation. Appl. Energy 2021, 285, 116440. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Units | Plug-in | HEV |
|---|---|---|---|
| ICE volume | dm3 | 1.8 | 1.8 |
| ICE power | kW | 72/5200 rpm | 72/5200 rpm |
| ICE torque | Nm | 142/3600 rpm | 142/3600 rpm |
| EM power | kW | 53 | 53 |
| EM torque | Nm | 163 | 163 |
| Battery | kWh | 8.8 | 1.3 |
| Vehicle weight | kg | 1536 | 1370 |
| Weight/Power of vehicle | kg/kW | 21.33 | 19.06 |
| Mileage | km | 35,000 | 27,000 |
| Model Year | – | 2020 | 2020 |
| Parameter | Requirement |
|---|---|
| temperature (ta) | normal range: 0 °C ≤ ta ≤ 30 ° Cupper extended range: 30 °C < ta ≤ 35 °C |
| driving style | relative positive acceleration (RPA): move than RPAmin; the product of velocity and acceleration (v ∙ a+): less than v ∙ a+max (for all road conditions) |
| old start | duration of the cold start period is defined from engine start to first of 5 min; total stop time during cold start < 90 s |
| any vehicle stop | 0–180 s |
| test requirements | 90–120 min |
| urban test phase requirements | share: 29–44%; distance: >16 km; vehicle speed: 0–60 km/h; average speed: 15–40 km/h; vehicle stop: 6–30% |
| rural test phase requirements | share: 23–43%; distance: >16 km; vehicle speed: 60–90 km/h |
| motorway test phase requirements | share 23–43%; distance: >16 km; vehicle velocity: 90–145 km/h; vehicle velocity over 100 km/h for at least 5 min; vehicle speed over 145 km/h no more than 3% of the test phase time |
| Uncertainty | NDIR Analyser Indications | NDUV Analyser Indications | ||
|---|---|---|---|---|
| Component | Carbon Monoxide | Carbon Dioxide | Nitrogen Oxide | Nitrogen Dioxide |
| measuring range | 0–8% | 0–20% | 0–2500 ppm | 0–500 ppm |
| extended uncertainty of measurement | ±3% reading (or 50 ppm CO) | ±3% of reading (or 0.1% CO2) | ±3% reading (or 15 ppm) | ±3% reading (or 10 ppm) |
| whichever is greater | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pielecha, J.; Skobiej, K.; Kubiak, P.; Wozniak, M.; Siczek, K. Exhaust Emissions from Plug-in and HEV Vehicles in Type-Approval Tests and Real Driving Cycles. Energies 2022, 15, 2423. https://doi.org/10.3390/en15072423
Pielecha J, Skobiej K, Kubiak P, Wozniak M, Siczek K. Exhaust Emissions from Plug-in and HEV Vehicles in Type-Approval Tests and Real Driving Cycles. Energies. 2022; 15(7):2423. https://doi.org/10.3390/en15072423
Chicago/Turabian StylePielecha, Jacek, Kinga Skobiej, Przemyslaw Kubiak, Marek Wozniak, and Krzysztof Siczek. 2022. "Exhaust Emissions from Plug-in and HEV Vehicles in Type-Approval Tests and Real Driving Cycles" Energies 15, no. 7: 2423. https://doi.org/10.3390/en15072423
APA StylePielecha, J., Skobiej, K., Kubiak, P., Wozniak, M., & Siczek, K. (2022). Exhaust Emissions from Plug-in and HEV Vehicles in Type-Approval Tests and Real Driving Cycles. Energies, 15(7), 2423. https://doi.org/10.3390/en15072423