
Frequency Dynamics in Fully Non-Synchronous Electrical Grids: A Case Study of an Existing Island





Abstract
:1. Introduction
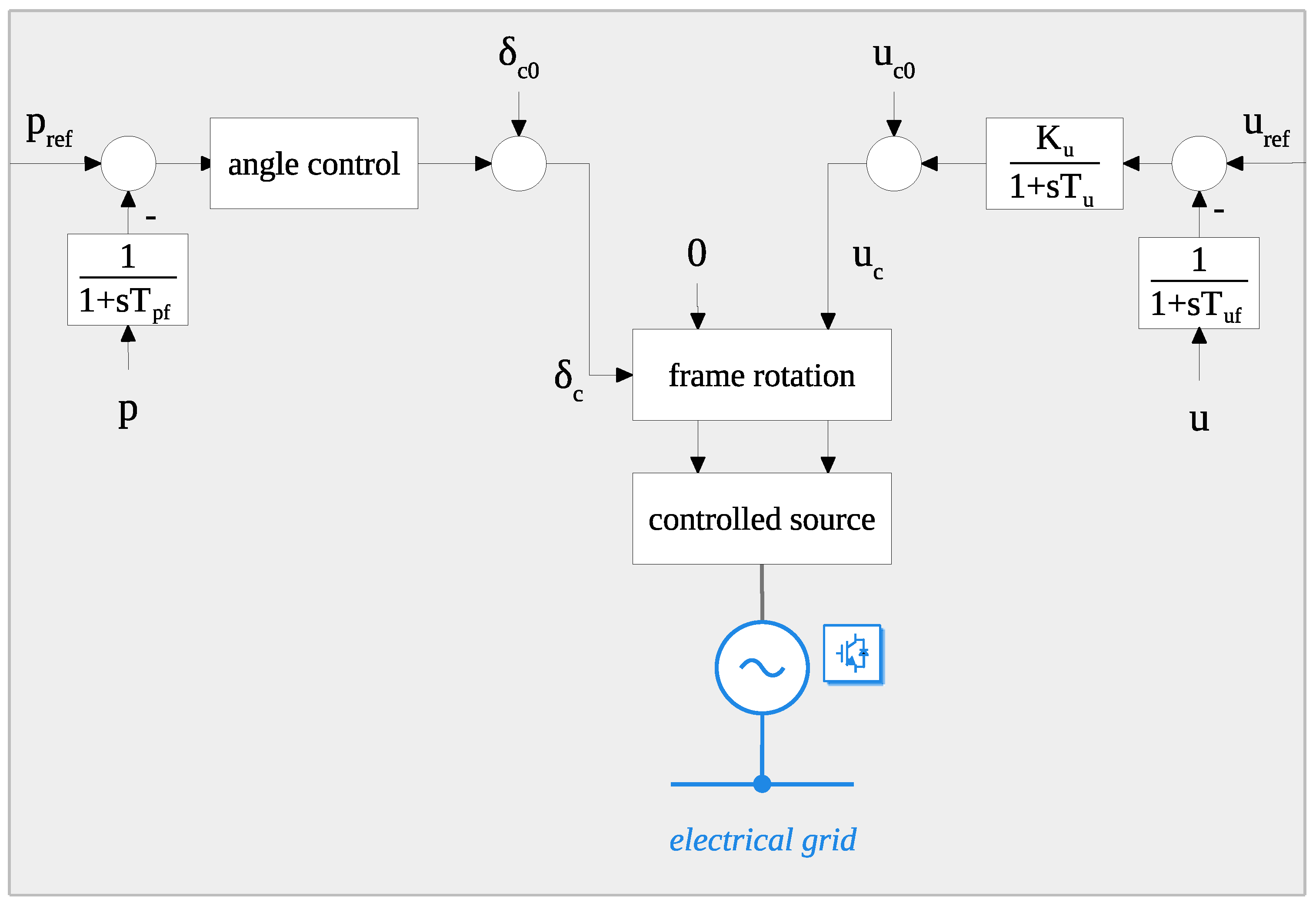
2. Grid-Forming Models for Phasor RMS Simulations
3. Frequency Dynamics of a Fully Non-Synchronous Autonomous System
3.1. Identification and Study of Critical Factors
- rated power of the grid-forming converter ();
- inertial effect of the grid-forming angle control ();
- frequency droop of the grid-forming angle control ();
- time constant of the low-pass filter on the active power measurement ();
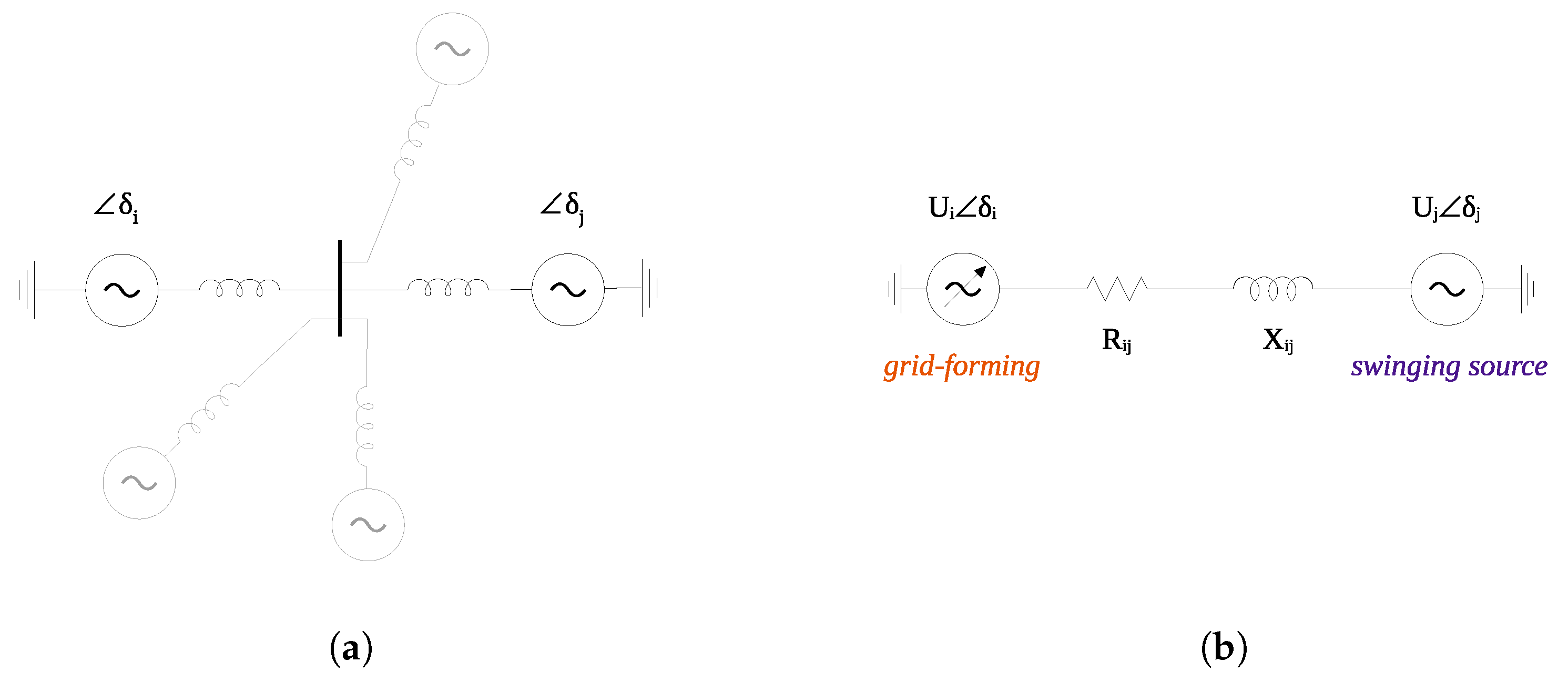
- the characteristics of the interconnections ();
- strength of the network ().
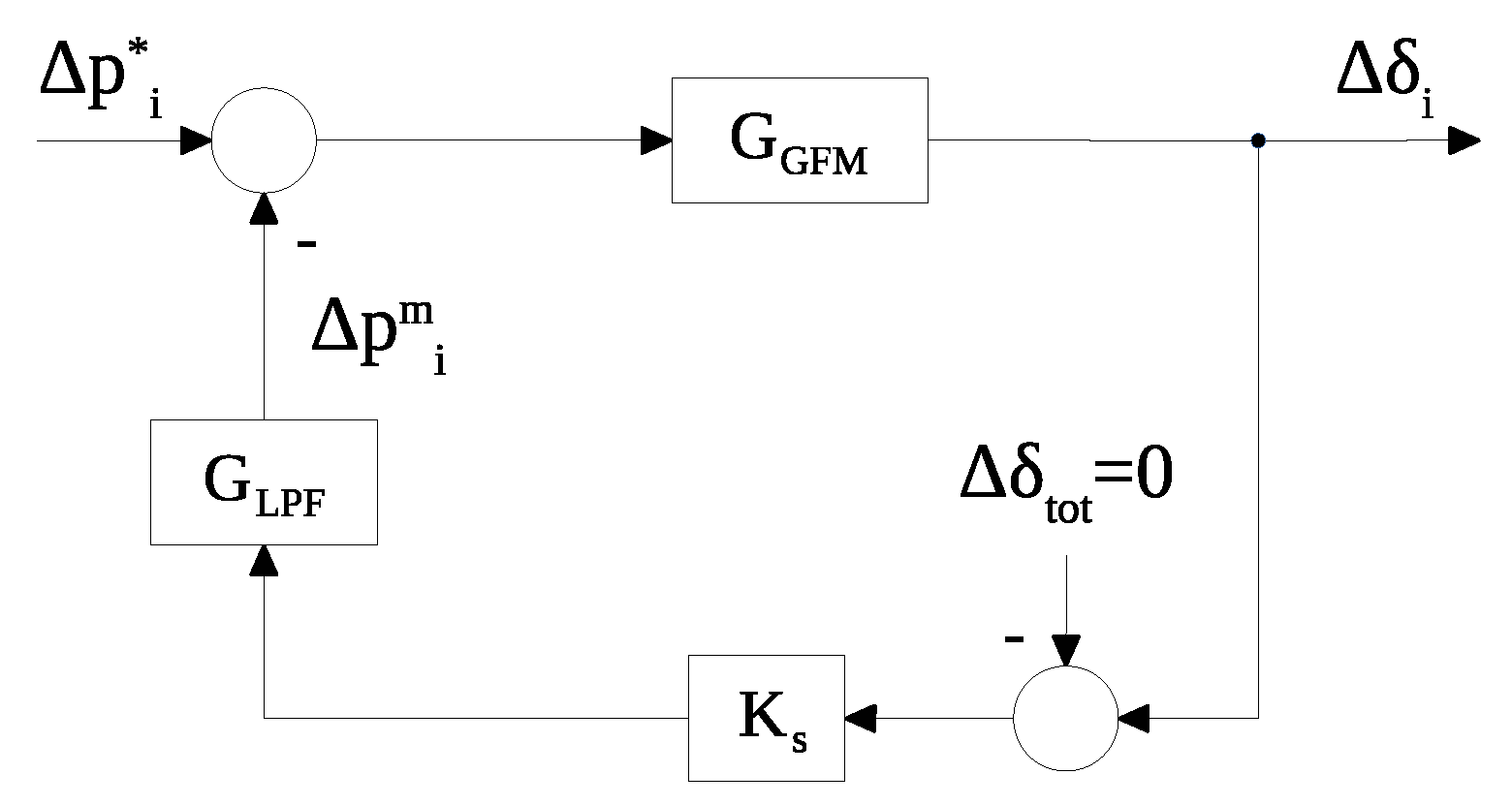
3.2. Discussion about Stability and Damping
4. Design Principles for Fully Non-Synchronous Autonomous Systems
4.1. Reference Hypothesis
4.2. Total Required Grid-Forming
4.3. Total Required Inertia
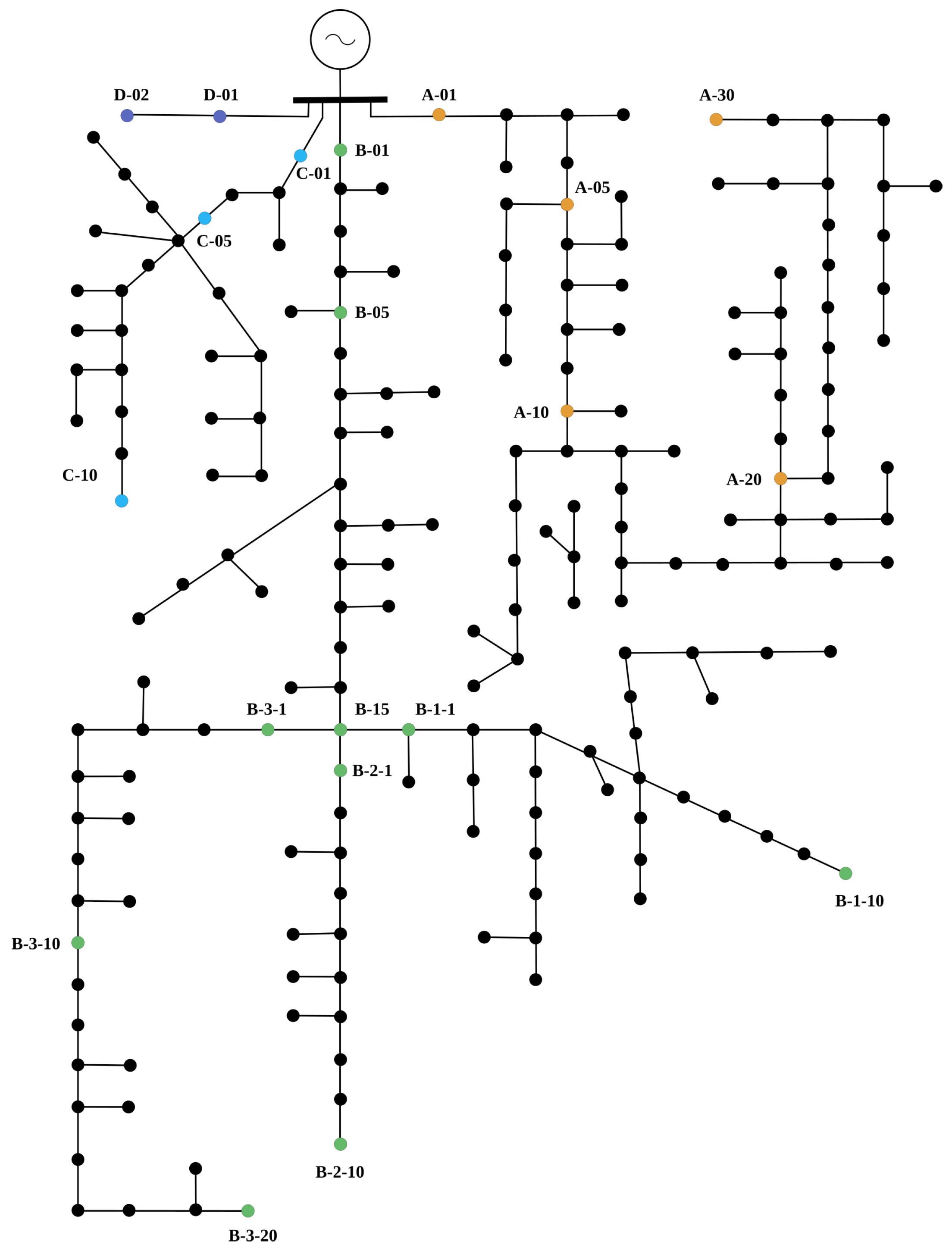
5. Case Study: Application to the Existing Power System of a Mediterranean Island
5.1. System Design for Frequency Dynamics
5.2. Impact of Size
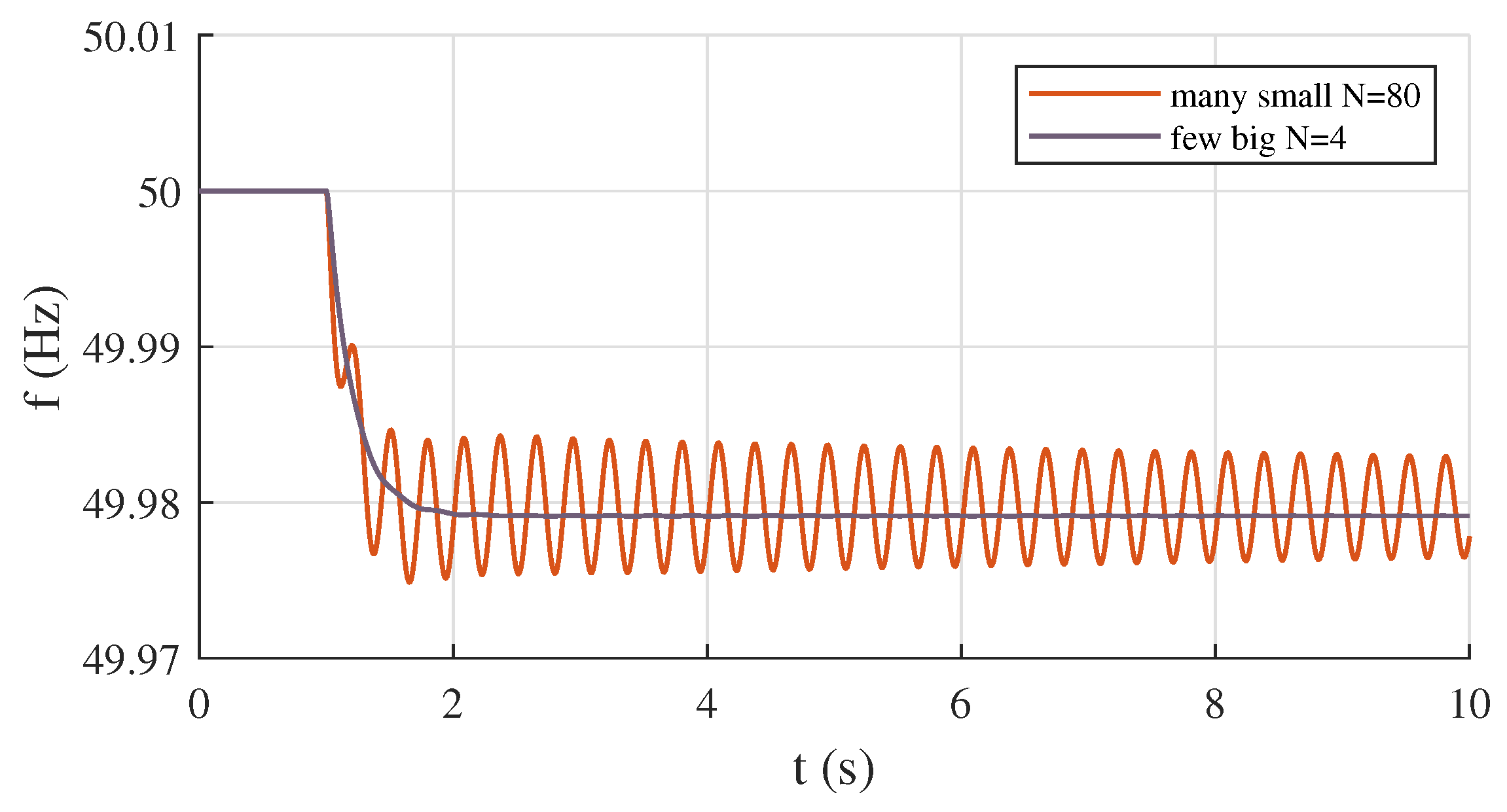
5.3. Impact of Number
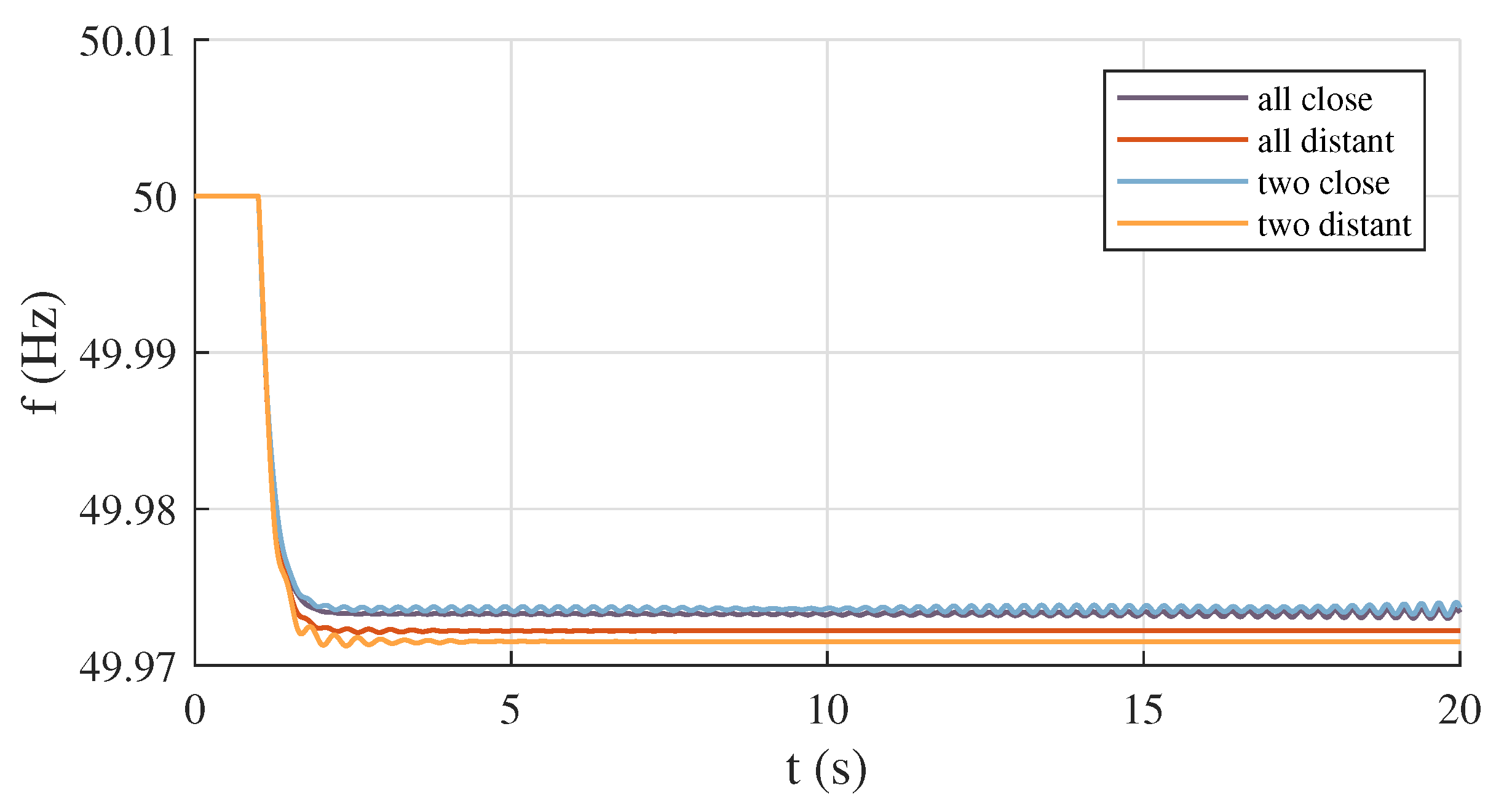
5.4. Impact of Location
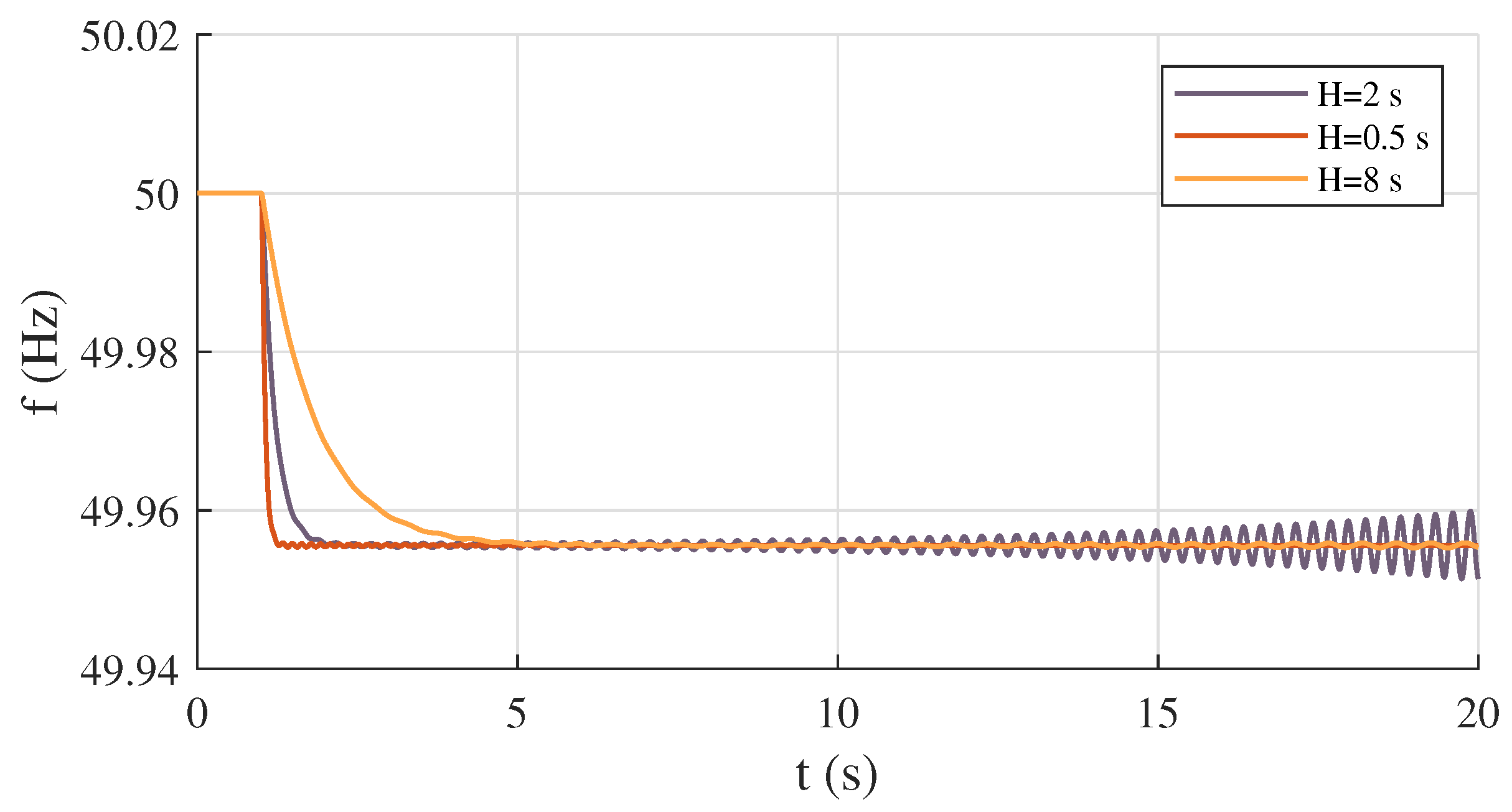
5.5. Impact of Inertial Effect
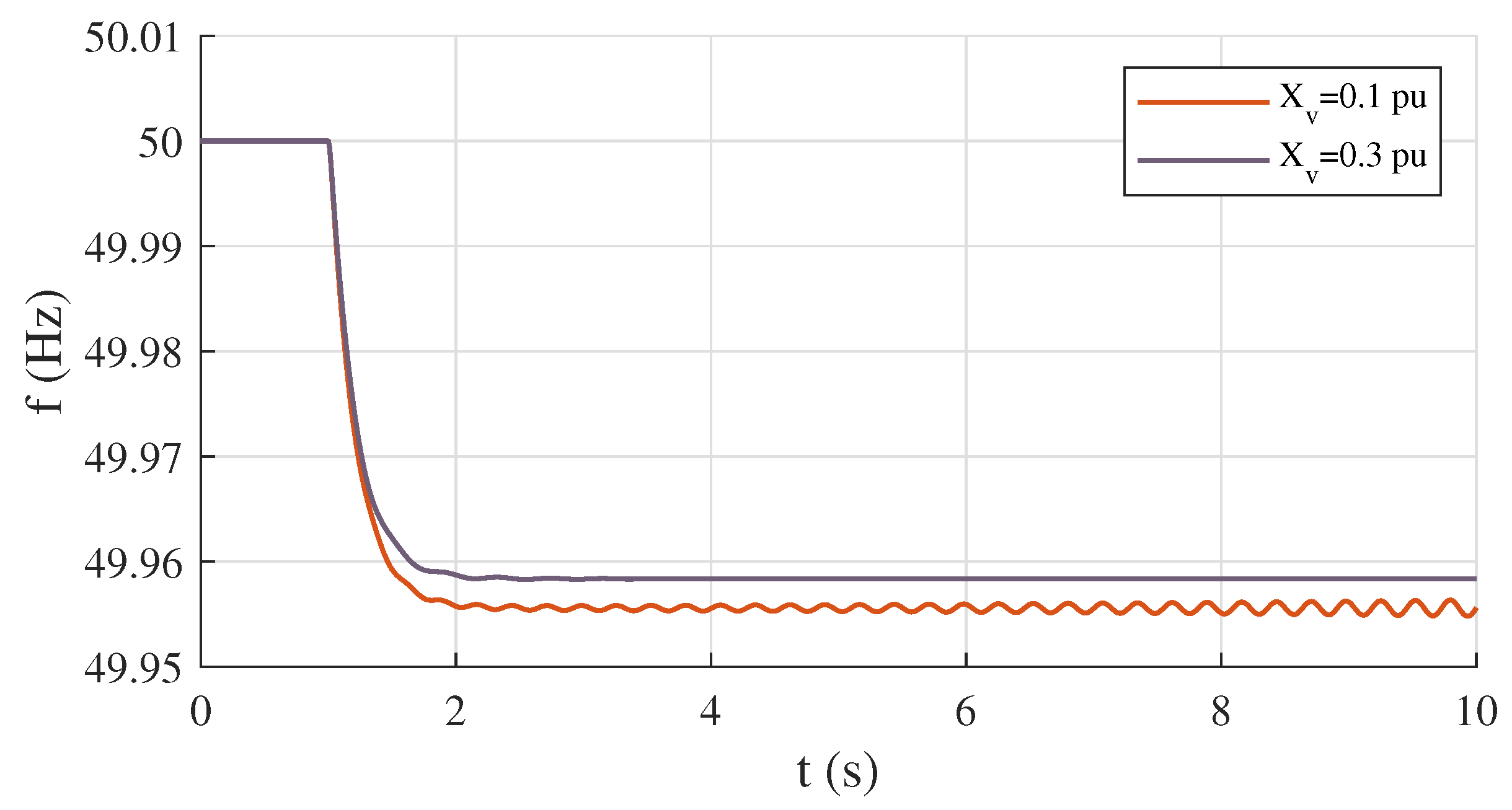
5.6. Impact of Virtual Impedance
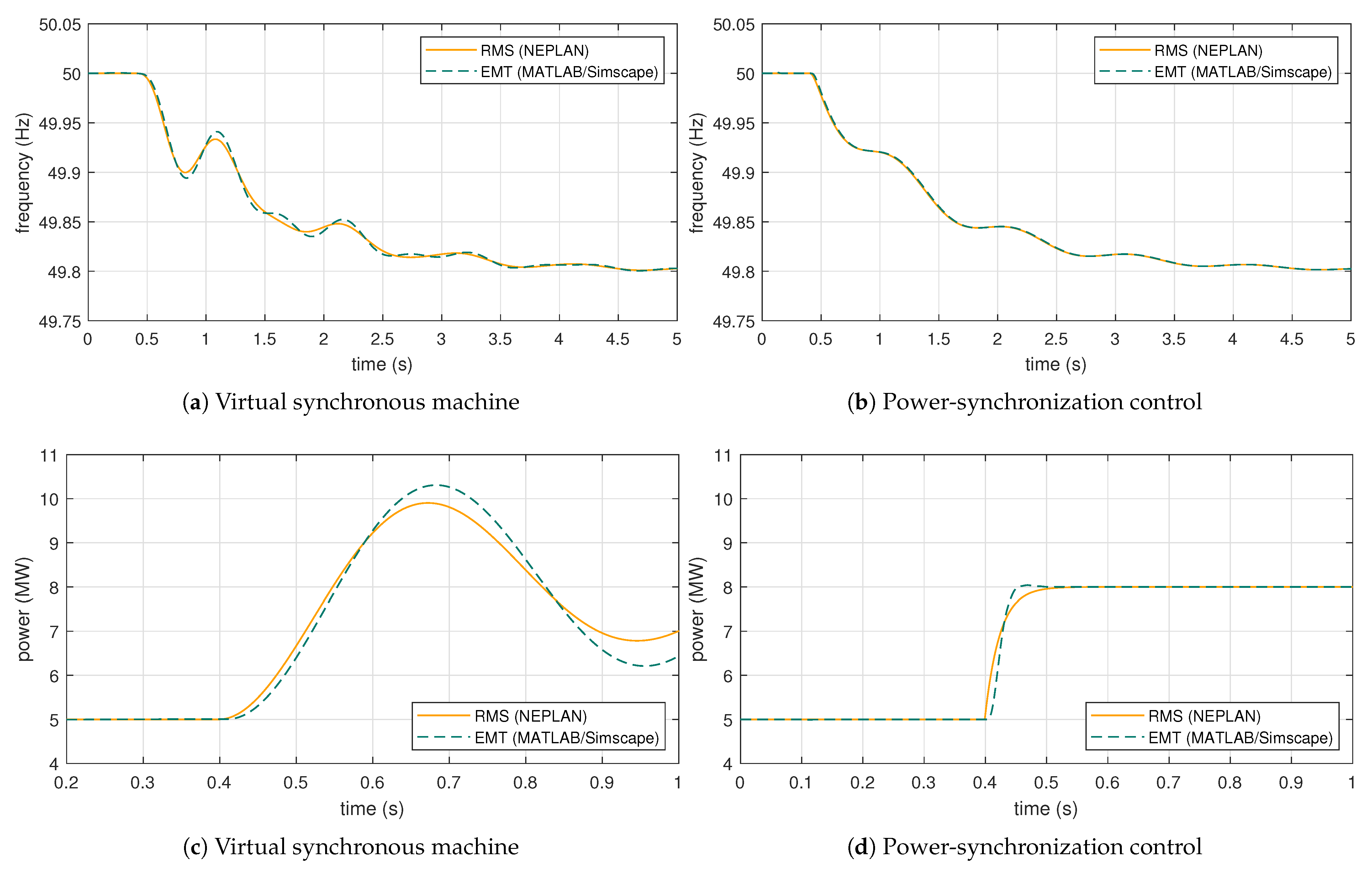
5.7. Impact of Control Strategy
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ackermann, T.; Prevost, T.; Vittal, V.; Roscoe, A.J.; Matevosyan, J.; Miller, N. Paving the Way: A Future without Inertia Is Closer Than You Think. IEEE Power Energy Mag. 2017, 15, 61–69. [Google Scholar] [CrossRef] [Green Version]
- Matevosyan, J.; Badrzadeh, B.; Prevost, T.; Quitmann, E.; Ramasubramanian, D.; Urdal, H.; Huang, S.; Vital, V.; O’Sullivan, J.; Quint, R. Grid-Forming Inverters: Are They the Key for High Renewable Penetration? IEEE Power Energy Mag. 2019, 17, 89–98. [Google Scholar] [CrossRef]
- Ramasubramanian, D.; Farantatos, E.; Ziaeinejad, S.; Mehrizi-Sani, A. Operation paradigm of an all converter interfaced generation bulk power system. IET Gener. Transm. Distrib. 2018, 12, 4240–4248. [Google Scholar] [CrossRef]
- Ndreko, M.; Rüberg, S.; Winter, W. Grid forming control scheme for power systems with up to 100% power electronic interfaced generation: A case study on Great Britain test system. IET Renew. Power Gener. 2020, 14, 1268–1281. [Google Scholar] [CrossRef]
- Chen, J.; Liu, M.; Milano, F.; O’Donnell, T. 100% Converter-Interfaced generation using virtual synchronous generator control: A case study based on the irish system. Electr. Power Syst. Res. 2020, 187, 106475. [Google Scholar] [CrossRef]
- Kouzelis, K.; Musca, R. A Study of Power-Frequency Dynamics in Isolated Power Networks with 100% Converter-Interfaced Generation. In Proceedings of the 19th Wind Integration Workshop, Virtual Conference, 11–12 November 2020. [Google Scholar]
- Gouveia, J.; Moreira, C.L.; Peças Lopes, J.A. Influence of Load Dynamics on Converter-Dominated Isolated Power Systems. Appl. Sci. 2021, 11, 2341. [Google Scholar] [CrossRef]
- Gouveia, J.; Moreira, C.L.; Peças Lopes, J.A. Grid-Forming Inverters Sizing in Islanded Power Systems—A stability perspective. In Proceedings of the 2019 International Conference on Smart Energy Systems and Technologies (SEST), Porto, Portugal, 9–11 September 2019. [Google Scholar]
- Bongiorno, M.; Favuzza, S.; Ippolito, M.G.; Musca, R.; Navia, M.S.N.; Sanseverino, E.R.; Zizzo, G. An Analysis of the Intertial Response of Small Isolated Power Systems in Presence of Generation from Renewable Energy Sources. In Proceedings of the IEEE 4th International Forum on Research and Technologies for Society and Industry, Palermo, Italy, 10–13 September 2018. [Google Scholar]
- Delille, G.; François, B.; Malarange, G. Dynamic Frequency Control Support by Energy Storage to Reduce the Impact of Wind and Solar Generation on Isolated Power System’s Inertia. IEEE Trans. Sustain. Energy 2012, 3, 931–939. [Google Scholar] [CrossRef]
- Horne, J.; Flynn, D.; Littler, T. Frequency Stability Issues for Islanded Power Systems. In Proceedings of the IEEE PES Power Systems Conference and Exposition, New York, NY, USA, 10–13 October 2004. [Google Scholar]
- Yuan, C.; Xie, P.; Yang, D.; Xiao, X. Transient Stability Analysis of Islanded AC Microgrids with a Significant Share of Virtual Synchronous Generators. Energies 2018, 11, 44. [Google Scholar] [CrossRef] [Green Version]
- Bongiorno, M.; Favuzza, S.; Ippolito, M.G.; Musca, R.; Navia, M.S.N.; Sanseverino, E.R.; Zizzo, G. System Stability of a Small Island’s Network with Different Levels of Wind Power Penetration. In Proceedings of the IEEE 4th International Forum on Research and Technologies for Society and Industry, Palermo, Italy, 10–13 September 2018. [Google Scholar]
- Eskandari, M.; Li, L.; Moradi, M.; Siano, P. A nodal approach based state-space model of droop-based autonomous networked microgrids. Sustain. Energy Grids Netw. 2019, 18, 100216. [Google Scholar] [CrossRef]
- Krismanto, A.; Mithulananthan, N.; Krause, O. Stability of Renewable Energy based Microgrid in Autonomous Operation. Sustain. Energy Grids Netw. 2018, 13, 134–147. [Google Scholar] [CrossRef] [Green Version]
- Oureilidis, K.O.; Demoulias, C. A decentralized impedance-based adaptive droop method for power loss reduction in a converter-dominated islanded microgrid. Sustain. Energy Grids Netw. 2016, 5, 39–49. [Google Scholar] [CrossRef]
- Unruh, P.; Nuschke, M.; Strauß, P.; Welck, F. Overview on Grid-Forming Inverter Control Methods. Energies 2020, 13, 2589. [Google Scholar] [CrossRef]
- Weise, B.; Korai, A.; Constantin, A. Comparison of Selected Grid-Forming Converter Control Strategies for Use in Power Electronic Dominated Power Systems. In Proceedings of the 18th Wind Integration Workshop, Dublin, Ireland, 16–18 October 2019. [Google Scholar]
- Zhong, Q.C.; Weiss, G. Synchronverters: Inverters that mimic synchronous generators. IEEE Trans. Ind. Electron. 2011, 58, 1259–1267. [Google Scholar] [CrossRef]
- Roscoe, A.J.; Yu, M.; Dyśko, A.; Booth, C.; Ierna, R.; Zhu, J.; Urdal, H. A VSM (Virtual Synchronous Machine) Convertor Control Model Suitable for RMS Studies for Resolving System Operator Owner Challenges. In Proceedings of the 15th Wind Integration Workshop, Vienna, Austria, 15–17 November 2016. [Google Scholar]
- Zhang, L.; Harnefors, L.; Nee, H.P. Power-Synchronization Control of Grid-Connected Voltage-Source Converters. IEEE Trans. Power Syst. 2010, 25, 809–820. [Google Scholar] [CrossRef]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodriguez, P. Control of Power Converters in AC Microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Tayyebi, A.; Groß, D.; Anta, A.; Kupzog, F.; Dörfler, F. Interactions of Grid-Forming Power Converters and Synchronous Machines—A Comparative Study. arXiv 2019, arXiv:1902.10750. [Google Scholar]
- Zuo, Y.; Yuan, Z.; Sossan, F.; Zecchino, A.; Cherkaoui, R.; Paolone, M. Performance assessment of grid-forming and grid-following converter-interfaced battery energy storage systems on frequency regulation in low-inertia power grids. Sustain. Energy Grids Netw. 2021, 27, 100496. [Google Scholar] [CrossRef]
- Bevrani, H.; Ise, T.; Miura, Y. Virtual synchronous generators: A survey and new perspectives. Electr. Power Syst. Res. 2014, 54, 244–254. [Google Scholar] [CrossRef]
- Mohammed, O.O.; Otuoze, A.O.; Salisu, S.; Ibrahim, O.; Rufa’i, N.A. Virtual Synchronous Generator: An Overview. Niger. J. Technol. 2019, 38, 153–164. [Google Scholar] [CrossRef]
- D’Arco, S.; Suul, J.A.; Fosso, O.B. A Virtual Synchronous Machine implementation for distributed control of power converters in SmartGrids. Electr. Power Syst. Res. 2015, 122, 180–197. [Google Scholar] [CrossRef]
- Yu, M.; Roscoe, A.J.; Booth, C.D.; Dysko, A.; Ierna, R.; Zhu, J.; Urdal, H. Use of an Inertia-less Virtual Synchronous Machine within Future Power Networks with High Penetrations of Converters. In Proceedings of the 2016 Power Systems Computation Conference (PSCC), Genoa, Italy, 20–24 June 2016. [Google Scholar]
- Hesse, R.; Turschner, D.; Beck, H.P. Micro grid stabilization using the Virtual Synchronous Machine (VISMA). In Proceedings of the International Conference on Renewable Energies and Power, Valencia, Spain, 15–17 April 2009. [Google Scholar]
- Pogaku, N.; Prodanovic, M.; Green, T.C. Modeling, Analysis and Testing of Autonomous Operation of an Inverter-Based Microgrid. IEEE Trans. Power Electron. 2007, 22, 613–625. [Google Scholar] [CrossRef] [Green Version]
- Brabandere, K.D.; Bolsens, B.; den Keybus, J.V.; Woyte, A.; Driesen, J.; Balmans, R. A voltage and frequency droop control method for parallel inverters. IEEE Trans. Power Electron. 2007, 22, 1107–1115. [Google Scholar] [CrossRef]
- Khaledia, A.; Golkar, M.A. Analysis of droop control method in an autonomous microgrid. J. Appl. Res. Technol. 2017, 15, 371–377. [Google Scholar] [CrossRef]
- NEPLAN Power Systems Analysis Software. Available online: https://www.neplan.ch/en-products/ (accessed on 2 February 2022).
- MATLAB Scientific Computation Software. Available online: https://mathworks.com/products/matlab.html (accessed on 2 February 2022).
- Dörfler, F.; Bullo, F. Synchronization in complex networks of phase oscillators: A survey. Automatica 2014, 50, 1539–1564. [Google Scholar] [CrossRef] [Green Version]
- Pan, D.; Wang, X.; Liu, F.; Shi, R. Transient Stability of Voltage-Source Converters With Grid-Forming Control: A Design-Oriented Study. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 1019–1033. [Google Scholar] [CrossRef]
- Liu, J.; Miura, Y.; Ise, T. Comparison of Dynamic Characteristics between Virtual Synchronous Generator and Droop Control in Inverter-Based Distributed Generators. IEEE Trans. Power Electron. 2016, 31, 3600–3611. [Google Scholar] [CrossRef]
- Pan, R.; Sun, P. Extra transient block for virtual synchronous machine with better performance. IET Gener. Transm. Distrib. 2020, 14, 1186–1196. [Google Scholar] [CrossRef]
- Qoria, T.; Gruson, F.; Colas, F.; Denis, G.; Prevost, T.; Guillaud, X. Inertia Effect and Load Sharing Capability of Grid Forming Converters Connected to a Transmission Grid. In Proceedings of the 15th IET International Conference on AC and DC Power Transmission, Coventry, UK, 5–7 February 2019. [Google Scholar]
- Kundur, P.; Balu, N.J.; Lauby, M.G. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Harnefors, L.; Hinkkanen, M.; Riaz, U.; Rahman, F.M.M.; Zhang, L. Robust Analytic Design of Power-Synchronization Control. IEEE Trans. Ind. Electron. 2019, 66, 5810–5819. [Google Scholar] [CrossRef] [Green Version]
- High Penetration of Power Electronic Interfaced Power Sources and the Potential Contribution of Grid Forming Converters; ENTSO-E Technical Report; ENTSO-E: Brussels, Belgium, January 2020.
- Liu, J.; Miura, Y.; Ise, T. A Comparative Study on Damping Methods of Virtual Synchronous Generator Control. In Proceedings of the 21st European Conference on Power Electronics and Applications (EPE19), Genova, Italy, 2–6 September 2019. [Google Scholar]
- Gao, B.; Xia, C.; Chen, N.; Cheema, K.M.; Yang, L.; Li, C. Virtual Synchronous Generator Based Auxiliary Damping Control Design for the Power System with Renewable Generation. Energies 2017, 10, 1146. [Google Scholar] [CrossRef]
- Pipelzadeh, Y.; Chaudhuri, B.; Green, T.C. Control Coordination Within a VSC HVDC Link for Power Oscillation Damping: A Robust Decentralized Approach Using Homotopy. IEEE Trans. Control Syst. Technol. 2013, 21, 1270–1279. [Google Scholar] [CrossRef] [Green Version]
- Ndreko, M.; van der Meer, A.A.; Rawn, B.G.; Gibescu, M.; van der Meijden, M.A.M.M. Damping Power System Oscillations by VSC-Based HVDC Networks: A North Sea Grid Case Study. In Proceedings of the International Workshop on Large-Scale Integration of Wind Power into Power Systems as well as on Transmission Networks for Offshore Wind Power Plants, London, UK, 22–24 October 2013. [Google Scholar]
- Dong, S.; Chen, Y.C. Adjusting Synchronverter Dynamic Response Speed via Damping Correction Loop. IEEE Trans. Energy Convers. 2017, 32, 608–619. [Google Scholar] [CrossRef]
- Ebrahimi, M.; Khajehoddin, S.A.; Karimi-Ghartemani, M. An Improved Damping Method for Virtual Synchronous Machines. IEEE Trans. Sustain. Energy 2019, 10, 1491–1500. [Google Scholar] [CrossRef]
- Bongiorno, M.; Ippolito, M.G.; Musca, R.; Zizzo, G. Damping Provision by Different Virtual Synchronous Machine Schemes. In Proceedings of the 20th International Conference on Environment and Electrical Engineering and 4th Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Madrid, Spain, 9–12 June 2020. [Google Scholar]
- Bongiorno, M.; Musca, R.; Zizzo, G. Grid Forming Converters in Weak Grids: The Case of a Mediterranean Island. In Proceedings of the 18th Wind Integration Workshop, Dublin, Ireland, 16–18 October 2019. [Google Scholar]
- Huang, L.; Xin, H.; Wang, Z. Damping Low-Frequency Oscillations Through VSC-HVDC Stations Operated as Virtual Synchronous Machines. IEEE Trans. Power Electron. 2019, 34, 5803–5818. [Google Scholar] [CrossRef]
- Bao, F.; Guo, J.; Wang, W.; Wang, B. Cooperative Control Strategy of Multiple VSGs in Microgrid Based on Adjacent Information. IEEE Access 2021, 9, 125603–125615. [Google Scholar] [CrossRef]
- Zhang, L.; Zheng, H.; Wan, T.; Shi, D.; Lyu, L.; Cai, G. An integrated control algorithm of power distribution for islanded microgrid based on improved virtual synchronous generator. IET Renew. Power Gener. 2021, 15, 2674–2685. [Google Scholar] [CrossRef]
- Liu, X.; Gong, R. A control strategy of microgrid-connected system based on VSG. In Proceedings of the 2020 IEEE International Conference on Power, Intelligent Computing and Systems (ICPICS), Shenyang, China, 28–30 July 2020. [Google Scholar] [CrossRef]
- Kim, J.Y.; Jeon, J.H.; Kim, S.K.; Cho, C.; Park, J.H.; Kim, H.M.; Nam, K.Y. Cooperative control strategy of energy storage system and microsources for stabilizing the microgrid during islanded operation. IEEE Trans. Power Electron. 2010, 25, 3037–3048. [Google Scholar] [CrossRef]
- Choopani, M.; Hosseinian, S.H.; Vahidi, B. New transient stability and LVRT improvement of multi-VSG grids using the frequency of the center of inertia. IEEE Trans. Power Syst. 2020, 35, 527–538. [Google Scholar] [CrossRef]
- Choopani, M.; Hosseinain, S.H.; Vahidi, B. A novel comprehensive method to enhance stability of multi-VSG grids. Int. J. Electr. Power Energy Syst. 2019, 104, 502–514. [Google Scholar] [CrossRef]
- Zhenao, S.; Fanglin, Z.; Xingchen, C. Study on a Frequency Fluctuation Attenuation Method for the Parallel Multi-VSG System. Front. Energy Res. 2021, 9, 310. [Google Scholar] [CrossRef]
- Du, W.; Chen, Z.; Schneider, K.P.; Lasseter, R.H.; Nandanoori, S.P.; Tuffner, F.K.; Kundu, S. A Comparative Study of Two Widely Used Grid-Forming Droop Controls on Microgrid Small-Signal Stability. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 963–975. [Google Scholar] [CrossRef]
- Chen, M.; Zhou, D.; Blaabjerg, F. Active Power Oscillation Damping Based on Acceleration Control in Paralleled Virtual Synchronous Generators System. IEEE Trans. Power Electron. 2021, 36, 9501–9510. [Google Scholar] [CrossRef]
- Guo, J.; Chen, Y.; Liao, S.; Wu, W.; Zhou, L.; Xie, Z.; Wang, X. Analysis and Mitigation of Low-Frequency Interactions Between the Source and Load Virtual Synchronous Machine in an Islanded Microgrid. IEEE Trans. Ind. Electron. 2021, 69, 3732–3742. [Google Scholar] [CrossRef]
- Beires, P.P.; Moreira, C.L.; Peças Lopes, J.A. Grid-forming inverters replacing Diesel generators in small-scale islanded power systems. In Proceedings of the 2019 IEEE Milan PowerTech, Milan, Italy, 23–27 June 2019. [Google Scholar]
- Fang, J.; Li, H.; Tang, Y.; Blaabjerg, F. Distributed Power System Virtual Inertia Implemented by Grid-Connected Power Converters. IEEE Trans. Power Electron. 2018, 33, 8488–8499. [Google Scholar] [CrossRef] [Green Version]
- MIGRATE Deliverable D1.1. Report on Systemic Issues. December 2016. Available online: https://ec.europa.eu/research/participants/documents/downloadPublic?documentIds=080166e5af08ecd7&appId=PPGMS (accessed on 2 February 2022).
- Poolla, B.K.; Groß, D.; Dörfler, F. Placement and Implementation of Grid-Forming and Grid-Following Virtual Inertia and Fast Frequency Response. IEEE Trans. Power Syst. 2019, 34, 3035–3046. [Google Scholar] [CrossRef] [Green Version]
- D’Arco, S.; Suul, J. Equivalence of Virtual Synchronous Machines and Frequency-Droops for Converter-Based MicroGrids. IEEE Trans. Smart Grid 2014, 5, 394–395. [Google Scholar] [CrossRef]
- Rodríguez-Cabero, A.; Roldán-Pérez, J.; Prodanovic, M. Virtual Impedance Design Considerations for Virtual Synchronous Machines in Weak Grids. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 1477–1489. [Google Scholar] [CrossRef]
- Suul, J.A.; D’Arco, S.; Rodriguez, P.; Molinas, M. Extended stability range of weak grids with Voltage Source Converters through impedance-conditioned grid synchronization. In Proceedings of the 11th IET International Conference on AC and DC Power Transmission, Birmingham, UK, 10–12 February 2015. [Google Scholar]
- Wang, X.; Taul, M.G.; Wu, H.; Liao, Y.; Blaabjerg, F.; Harnefors, L. Grid-Synchronization Stability of Converter-Based Resources—An Overview. IEEE Open J. Ind. Appl. 2020, 1, 115–134. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Key Factor | Description |
|---|---|
| Number and size | Share of grid-forming converters and rated powers |
| Location | Electrical distances and impedances |
| Control parameters | Inertial effect and virtual impedance |
| Sr (MVA) | System Response | |||
|---|---|---|---|---|
| GFM1 | GFM2 | H1 = H2 | H1 ≪ H2 | H1 ≫ H2 |
| 1 | 1 | unstable | marginally stable | marginally stable |
| 4 | 4 | stable | stable | stable |
| 1 | 4 | unstable | marginally stable | stable |
| 4 | 1 | unstable | stable | marginally stable |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ippolito, M.G.; Musca, R.; Sanseverino, E.R.; Zizzo, G. Frequency Dynamics in Fully Non-Synchronous Electrical Grids: A Case Study of an Existing Island. Energies 2022, 15, 2220. https://doi.org/10.3390/en15062220
Ippolito MG, Musca R, Sanseverino ER, Zizzo G. Frequency Dynamics in Fully Non-Synchronous Electrical Grids: A Case Study of an Existing Island. Energies. 2022; 15(6):2220. https://doi.org/10.3390/en15062220
Chicago/Turabian StyleIppolito, Mariano G., Rossano Musca, Eleonora Riva Sanseverino, and Gaetano Zizzo. 2022. "Frequency Dynamics in Fully Non-Synchronous Electrical Grids: A Case Study of an Existing Island" Energies 15, no. 6: 2220. https://doi.org/10.3390/en15062220
APA StyleIppolito, M. G., Musca, R., Sanseverino, E. R., & Zizzo, G. (2022). Frequency Dynamics in Fully Non-Synchronous Electrical Grids: A Case Study of an Existing Island. Energies, 15(6), 2220. https://doi.org/10.3390/en15062220