
Fast Real-Time RDFT- and GDFT-Based Direct Fault Diagnosis of Induction Motor Drive


Abstract
:1. Introduction
2. Asymmetric Induction Machine Modelling
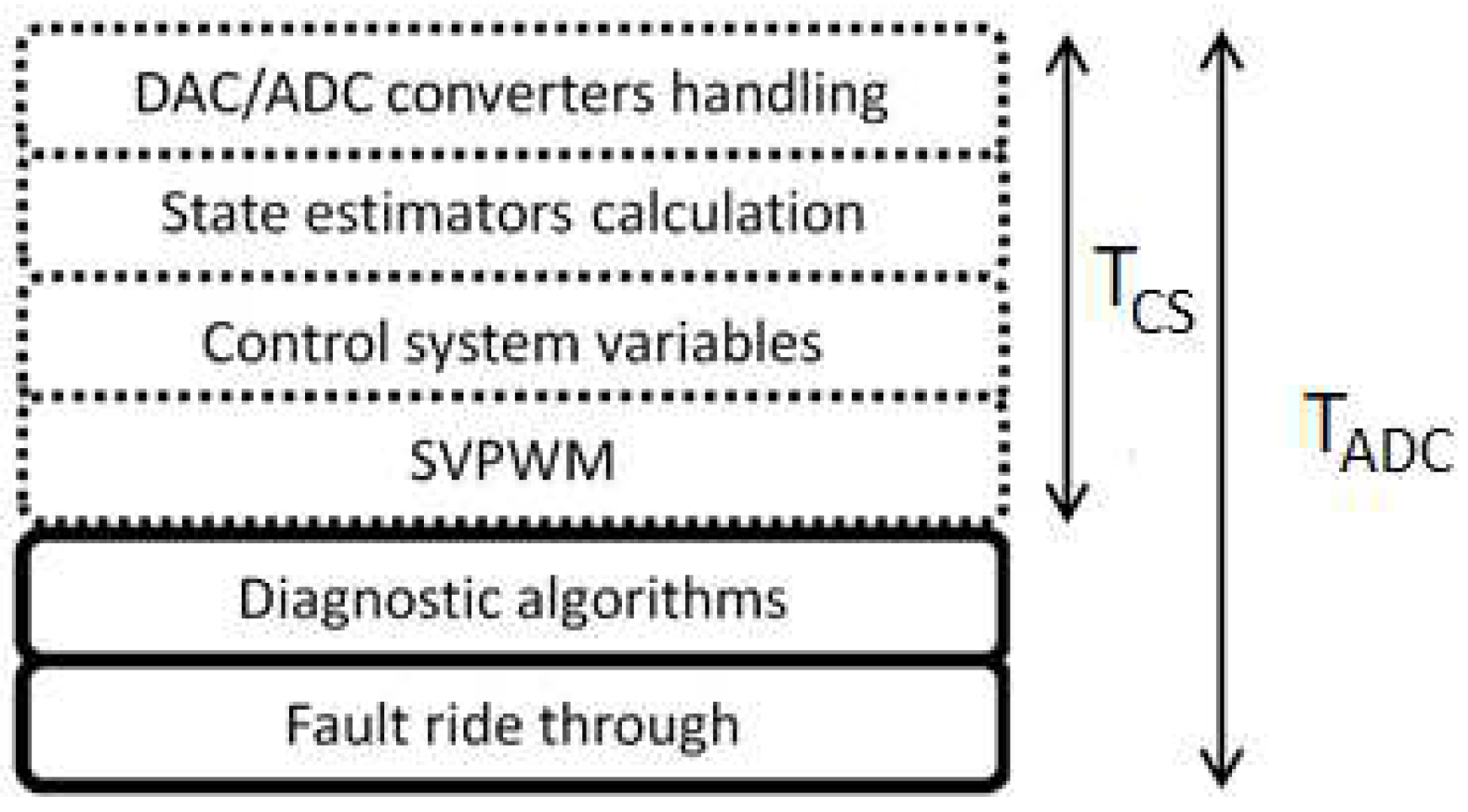
3. Control System
4. Direct DFT-Based Fault Diagnosis Approach
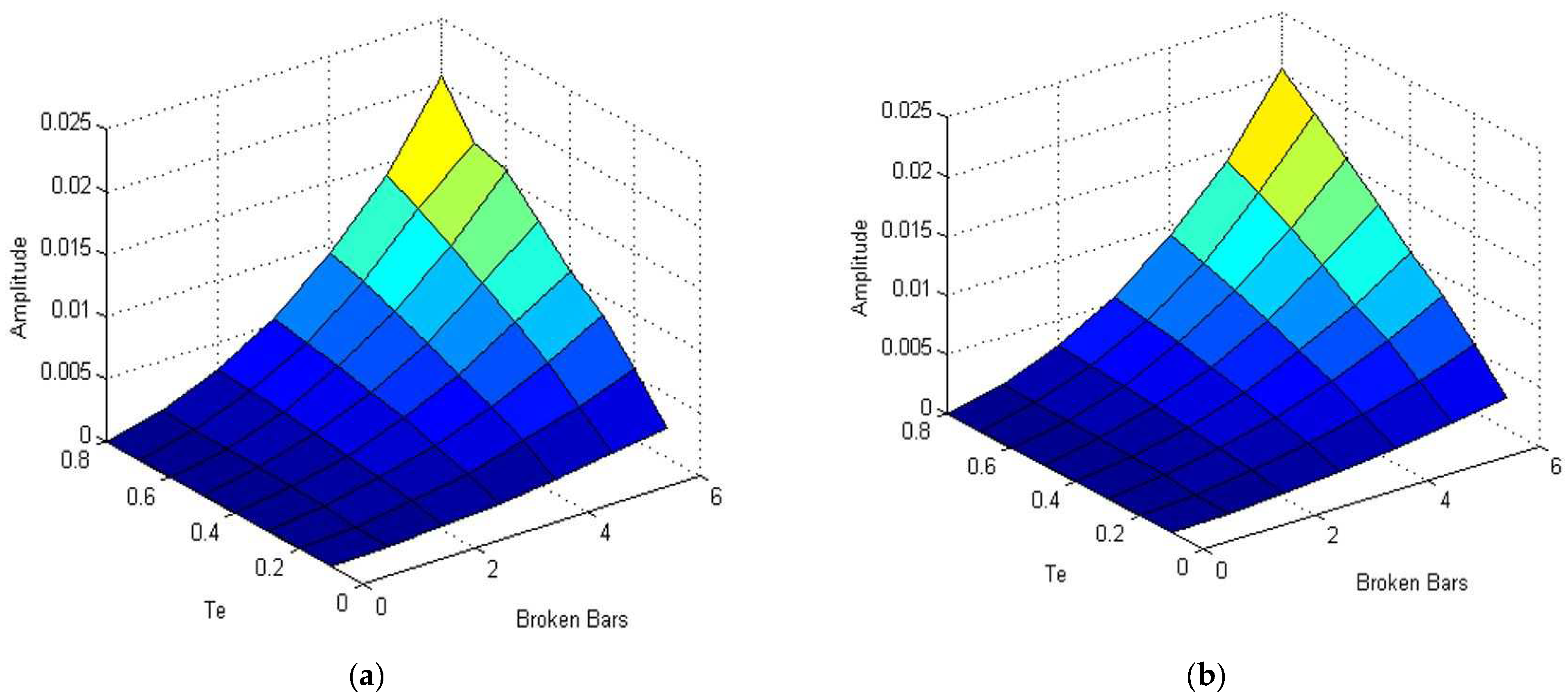
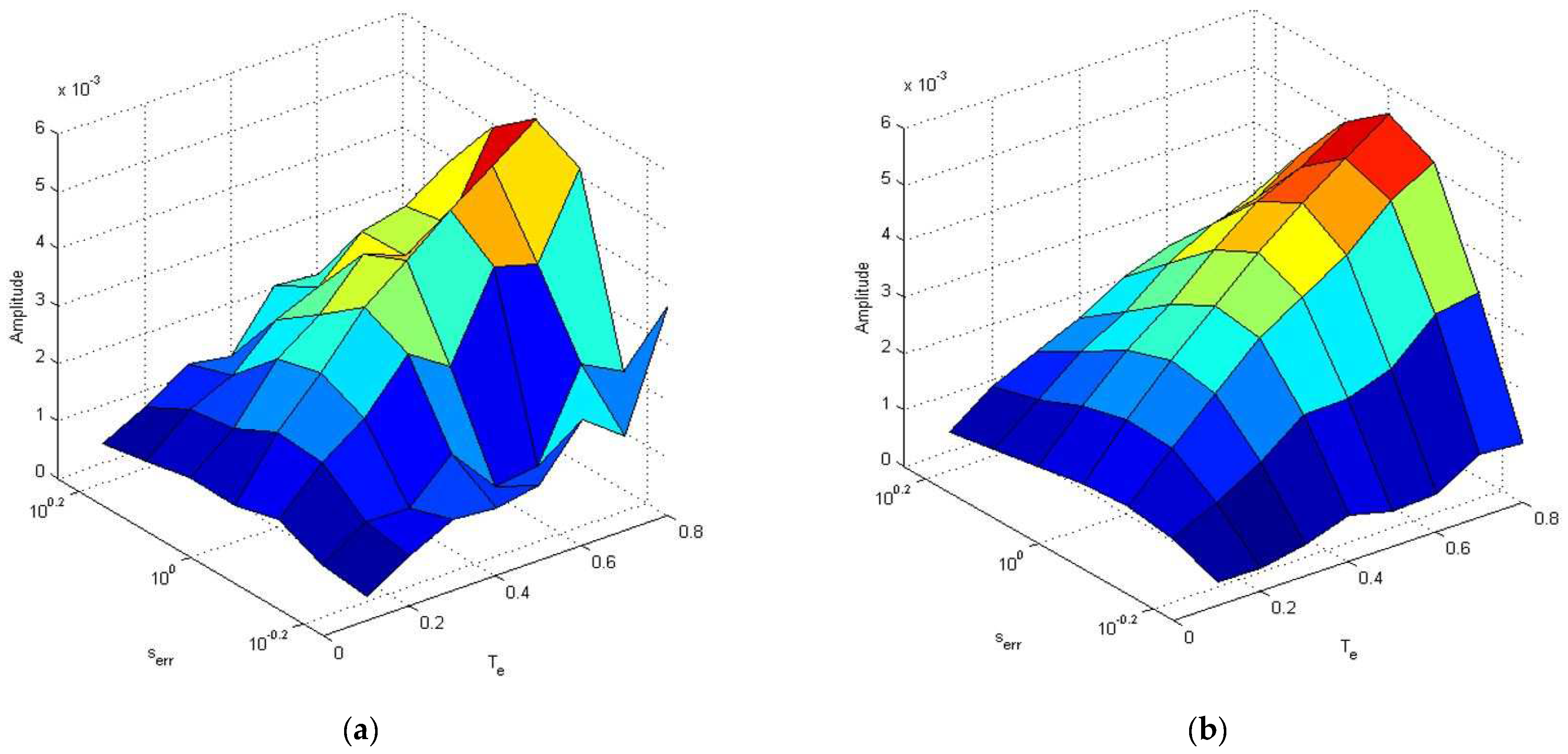
5. Simulation Analysis
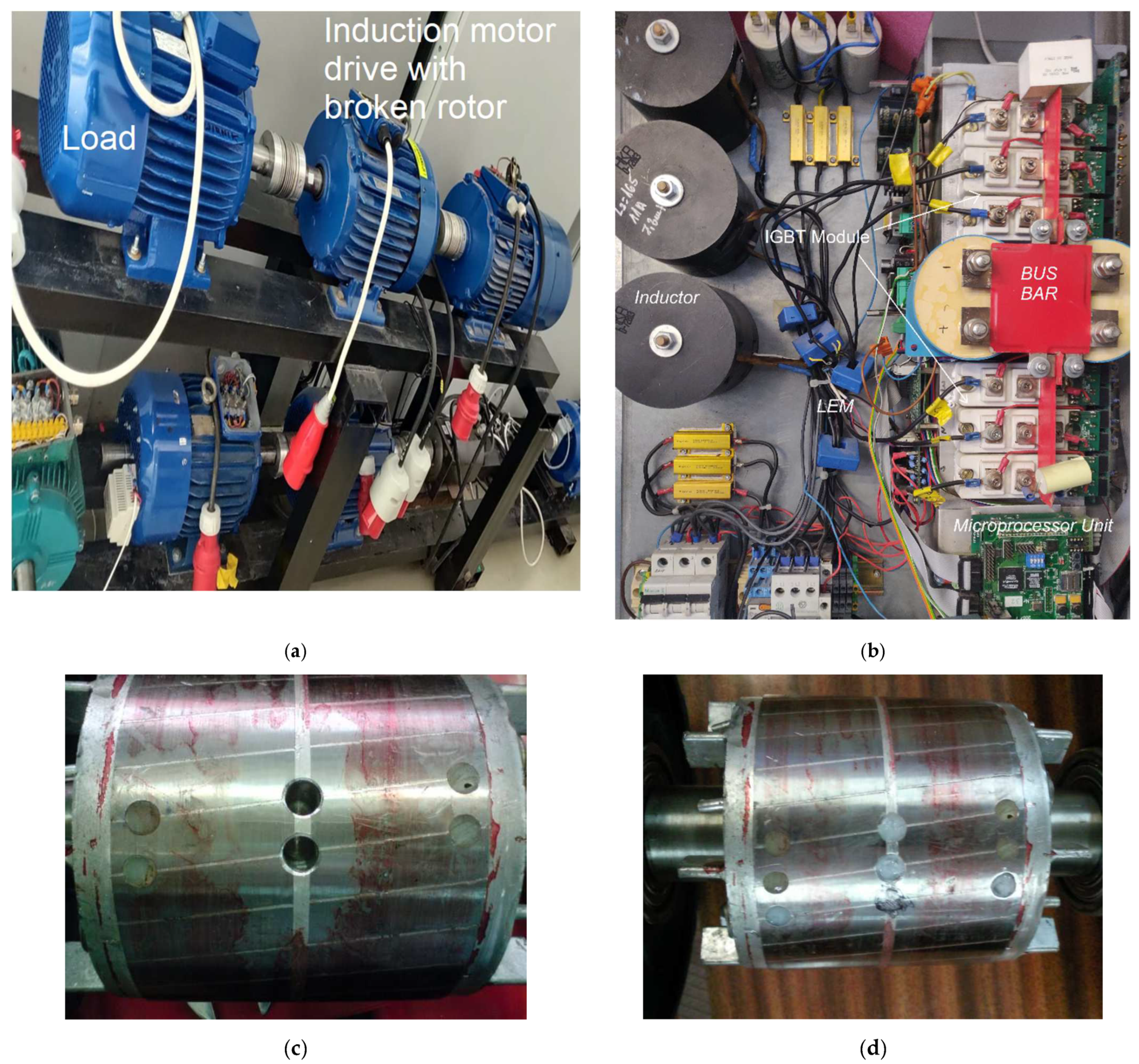
6. Experimental Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Riera-Guasp, M.; Antonino-Daviu, J.A.; Capolino, G.-A. Advances in Electrical Machine, Power Electronic, and Drive Condition Monitoring and Fault Detection: State of the Art. IEEE Trans. Ind. Electron. 2014, 62, 1746–1759. [Google Scholar] [CrossRef]
- Merizalde, Y.; Hernández-Callejo, L.; Duque-Perez, O. State of the Art and Trends in the Monitoring, Detection and Diagnosis of Failures in Electric Induction Motors. Energies 2017, 10, 1056. [Google Scholar] [CrossRef] [Green Version]
- Terron-Santiago, C.; Martinez-Roman, J.; Puche-Panadero, R.; Sapena-Bano, A. A Review of Techniques Used for Induction Machine Fault Modelling. Sensors 2021, 21, 4855. [Google Scholar] [CrossRef] [PubMed]
- Tian, Y.; Guo, D.; Zhang, K.; Jia, L.; Qiao, H.; Tang, H. A Review of Fault Diagnosis for Traction Induction Motor. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 5763–5768. [Google Scholar]
- Chen, H.; Jiang, B. A Review of Fault Detection and Diagnosis for the Traction System in High-Speed Trains. IEEE Trans. Intell. Transp. Syst. 2019, 21, 450–465. [Google Scholar] [CrossRef]
- Kim, B.; Lee, K.; Yang, J.; Bin Lee, S.; Wiedenbrug, E.J.; Shah, M.R. Automated Detection of Rotor Faults for Inverter-Fed Induction Machines Under Standstill Conditions. IEEE Trans. Ind. Appl. 2010, 47, 55–64. [Google Scholar] [CrossRef]
- Li, L.; Lu, W.; Wang, X.; Li, Z. A frequency domain feature based cascade classifier and its application to fault diagnosis. In Proceedings of the 28th Chinese Control and Decision Conference, CCDC 2016, Yinchuan, China, 28–30 May 2016; Volume 2, pp. 5957–5961. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, J.; Li, H.; Zhen, D.; Xu, Y.; Gu, F. Fault Identification of Broken Rotor Bars in Induction Motors Using an Improved Cyclic Modulation Spectral Analysis. Energies 2019, 12, 3279. [Google Scholar] [CrossRef] [Green Version]
- Moussa, M.A.; Boucherma, M.; Khezzar, A. A Detection Method for Induction Motor Bar Fault Using Sidelobes Leakage Phenomenon of the Sliding Discrete Fourier Transform. IEEE Trans. Power Electron. 2016, 32, 5560–5572. [Google Scholar] [CrossRef]
- Sahraoui, M.; Cardoso, A.J.M.; Ghoggal, A. The Use of a Modified Prony Method to Track the Broken Rotor Bar Characteristic Frequencies and Amplitudes in Three-Phase Induction Motors. IEEE Trans. Ind. Appl. 2014, 51, 2136–2147. [Google Scholar] [CrossRef]
- Skowron, M.; Orlowska-Kowalska, T.; Wolkiewicz, M.; Kowalski, C.T. Convolutional Neural Network-Based Stator Current Data-Driven Incipient Stator Fault Diagnosis of Inverter-Fed Induction Motor. Energies 2020, 13, 1475. [Google Scholar] [CrossRef] [Green Version]
- Rinanto, N.; Adhitya, R.Y.; Sarena, S.T.; Kautsar, S.; Munadhif, I.; Setyoko, A.S.; Syai’In, M.; Soeprijanto, A. Rotor bars fault detection by DFT spectral analysis and Extreme Learning Machine. In Proceedings of the 2016 International Symposium on Electronics and Smart Devices, ISESD 2016, Bandung, Indonesia, 29–30 November 2016; pp. 103–108. [Google Scholar] [CrossRef]
- Kolodziejek, P.; Bogalecka, E. Broken rotor bar impact on sensorless control of induction machine. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2009, 28, 540–555. [Google Scholar] [CrossRef]
- Puche-Panadero, C.R.; Pineda-Sanchez, M.; Riera-Guasp, M.; Roger-Folch, J.; Hurtado-Perez, E.; Perez-Cruz, J. Improved Resolution of the MCSA Method Via Hilbert Transform, Enabling the Diagnosis of Rotor Asymmetries at Very Low Slip. IEEE Trans. Energy Convers. 2013, 24, 52–59. [Google Scholar] [CrossRef]
- Kral, C.; Pirker, F.; Pascoli, G. The impact of inertia on rotor faults effects theoretical aspects of the Vienna Monitoring Method. In Proceedings of the 2007 IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives, SDEMPED, Cracow, Poland, 6–7 September 2007; pp. 77–82. [Google Scholar] [CrossRef]
- Luo, M.; Liu, Z.; Zhou, H.; Zhang, X.; Gao, F. Diagnosis simulation of broken rotor bars in squirrel cage induction motor fed with variable frequency power. In Proceedings of the 27th Chinese Control Conference CCC, Kunming, China, 16–18 July 2008; pp. 88–92. [Google Scholar] [CrossRef]
- Gritli, Y.; Bellini, A.; Rossi, C.; Casadei, D.; Filippetti, F.; Capolino, G.A. Condition monitoring of mechanical faults in induction machines from electrical signatures: Review of different techniques. In Proceedings of the 2017 IEEE 11th International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives, SDEMPED 2017, Tinos, Greece, 29 August–1 September 2017; Volume 2017, pp. 77–84. [Google Scholar] [CrossRef]
- Nemec, M.; Ambrožič, V.; Fišer, R.; Nedeljković, D.; Drobnič, K. Induction motor broken rotor bar detection based on rotor flux angle monitoring. Energies 2019, 12, 794. [Google Scholar] [CrossRef] [Green Version]
- Ayhan, B.; Chow, M.-Y.; Song, M.-H. Multiple Signature Processing-Based Fault Detection Schemes for Broken Rotor Bar in Induction Motors. IEEE Trans. Energy Convers. 2005, 20, 336–343. [Google Scholar] [CrossRef] [Green Version]
- Lu, B.; Paghda, M. Induction motor rotor fault diagnosis using wavelet analysis of one-cycle average power. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition APEC 2018, San Antonio, TX, USA, 4–8 March 2018; pp. 1113–1118. [Google Scholar] [CrossRef]
- Kołodziejek, P.; Bogalecka, E. Broken rotor symptoms in the sensorless control of induction machine. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2011, 31, 237–247. [Google Scholar] [CrossRef]
- Kia, S.H.; Henao, H.; Capolino, G.A.; Martis, C. Induction machine broken bars fault detection using stray flux after supply disconnection. IECON Proc. 2006, 2006, 1498–1503. [Google Scholar] [CrossRef]
- Jornet, A.; Espinosa, A.G.; Romeral, L.; Cusidó, J.; Ortega, J.A. Double frequency test for detecting faults in induction machines. IECON Proc. 2005, 2005, 1516–1521. [Google Scholar] [CrossRef]
- Drif, M.; Cardoso, A.J.M. The Use of the Instantaneous-Reactive-Power Signature Analysis for Rotor-Cage-Fault Diagnostics in Three-Phase Induction Motors. IEEE Trans. Ind. Electron. 2009, 56, 4606–4614. [Google Scholar] [CrossRef]
- Touhami, O.; Fadel, M. Detection of Broken Rotor Bars and Stator Faults in Squirrel-Cage Induction Machine by Spectral Analysis. In Proceedings of the 2007 Thirty-Ninth Southeastern Symposium on System Theory, Macon, GA, USA, 4−7 March 2007; pp. 274–278. [Google Scholar] [CrossRef]
- Pakhaliuk, B.; Shevchenko, V.; Mućko, J.; Husev, O.; Lukianov, M.; Kołodziejek, P.; Strzelecka, N.; Strzelecki, R. Optimal Rotating Receiver Angles Estimation for Multicoil Dynamic Wireless Power Transfer. Energies 2021, 14, 6144. [Google Scholar] [CrossRef]
- Adamowicz, M.; Szewczyk, J. SiC-Based Power Electronic Traction Transformer (PETT) for 3 kV DC Rail Traction. Energies 2020, 13, 5573. [Google Scholar] [CrossRef]
- Kołodziejek, P. State and control system variables sensitivity to rotor asymmetry in the induction motor drive. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2012, 32, 142–152. [Google Scholar] [CrossRef]
- Wlas, M.; Galla, S.; Kouzou, A.; Kolodziejek, P. Analysis of an Energy Management System of a Small Plant Connected to the Rural Power System. Energies 2022, 15, 719. [Google Scholar] [CrossRef]
- Wu, Y.; Liu, Z.X.; Li, R.Y. Fault diagnosis way based on subsection spectrum zoom analysis by CZT for squirrel cage induction motors. In Proceedings of the 2008 International Conference on Condition Monitoring and Diagnosis, Beijing, China, 21–24 April 2008; pp. 208–211. [Google Scholar] [CrossRef]
- Krzemiński, Z. Cyfrowe Sterowanie Maszynami Asynchronicznymi; Gdansk University of Technology: Gdańsk, Poland, 2000. (In Polish) [Google Scholar]
- Wachowiak, D. A Universal Gains Selection Method for Speed Observers of Induction Machine. Energies 2021, 14, 6790. [Google Scholar] [CrossRef]
- Wachowiak, D. Genetic Algorithm Approach for Gains Selection of Induction Machine Extended Speed Observer. Energies 2020, 13, 4632. [Google Scholar] [CrossRef]
- Cooley, J.W.; Tukey, J.W. An Algorithm for the Machine Calculation of Complex Fourier Series. Math. Comput. 1965, 19, 297–301. [Google Scholar] [CrossRef]
- Gerard, G. An Algorithm for the Evaluation of Finite Trigonometric Series. Am. Math. Mon. 1958, 65, 34–35. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ωr | Te | GDFT (dB) | RDFT (dB) |
|---|---|---|---|
| 0.3 | 0.25 | 40.8 | 40.8 |
| 0.3 | 0.5 | 19.1 | 19.1 |
| 0.3 | 0.72 | 13.5 | 12.0 |
| 0.65 | 0.25 | 20.8 | 20.8 |
| 0.65 | 0.5 | 25.1 | 25.1 |
| 0.65 | 0.72 | 28.0 | 27.6 |
| 1 | 0.25 | 22.3 | 22.3 |
| 1 | 0.5 | 19.1 | 19.1 |
| 1 | 0.72 | 13.4 | 13.4 |
| ωr | Te | GDFT (dB) | RDFT (dB) |
|---|---|---|---|
| 0.3 | 0.25 | 40.8 | 40.8 |
| 0.3 | 0.5 | 19.1 | 19.1 |
| 0.3 | 0.72 | 13.5 | 12.0 |
| 0.65 | 0.25 | 20.8 | 20.8 |
| 0.65 | 0.5 | 25.1 | 25.1 |
| 0.65 | 0.72 | 28.0 | 27.6 |
| 1 | 0.25 | 22.3 | 22.3 |
| 1 | 0.5 | 19.1 | 19.1 |
| 1 | 0.72 | 13.4 | 13.4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kołodziejek, P.; Wachowiak, D. Fast Real-Time RDFT- and GDFT-Based Direct Fault Diagnosis of Induction Motor Drive. Energies 2022, 15, 1244. https://doi.org/10.3390/en15031244
Kołodziejek P, Wachowiak D. Fast Real-Time RDFT- and GDFT-Based Direct Fault Diagnosis of Induction Motor Drive. Energies. 2022; 15(3):1244. https://doi.org/10.3390/en15031244
Chicago/Turabian StyleKołodziejek, Piotr, and Daniel Wachowiak. 2022. "Fast Real-Time RDFT- and GDFT-Based Direct Fault Diagnosis of Induction Motor Drive" Energies 15, no. 3: 1244. https://doi.org/10.3390/en15031244
APA StyleKołodziejek, P., & Wachowiak, D. (2022). Fast Real-Time RDFT- and GDFT-Based Direct Fault Diagnosis of Induction Motor Drive. Energies, 15(3), 1244. https://doi.org/10.3390/en15031244