
A Convolutional Neural Network Approach for Estimation of Li-Ion Battery State of Health from Charge Profiles


Abstract
:1. Introduction
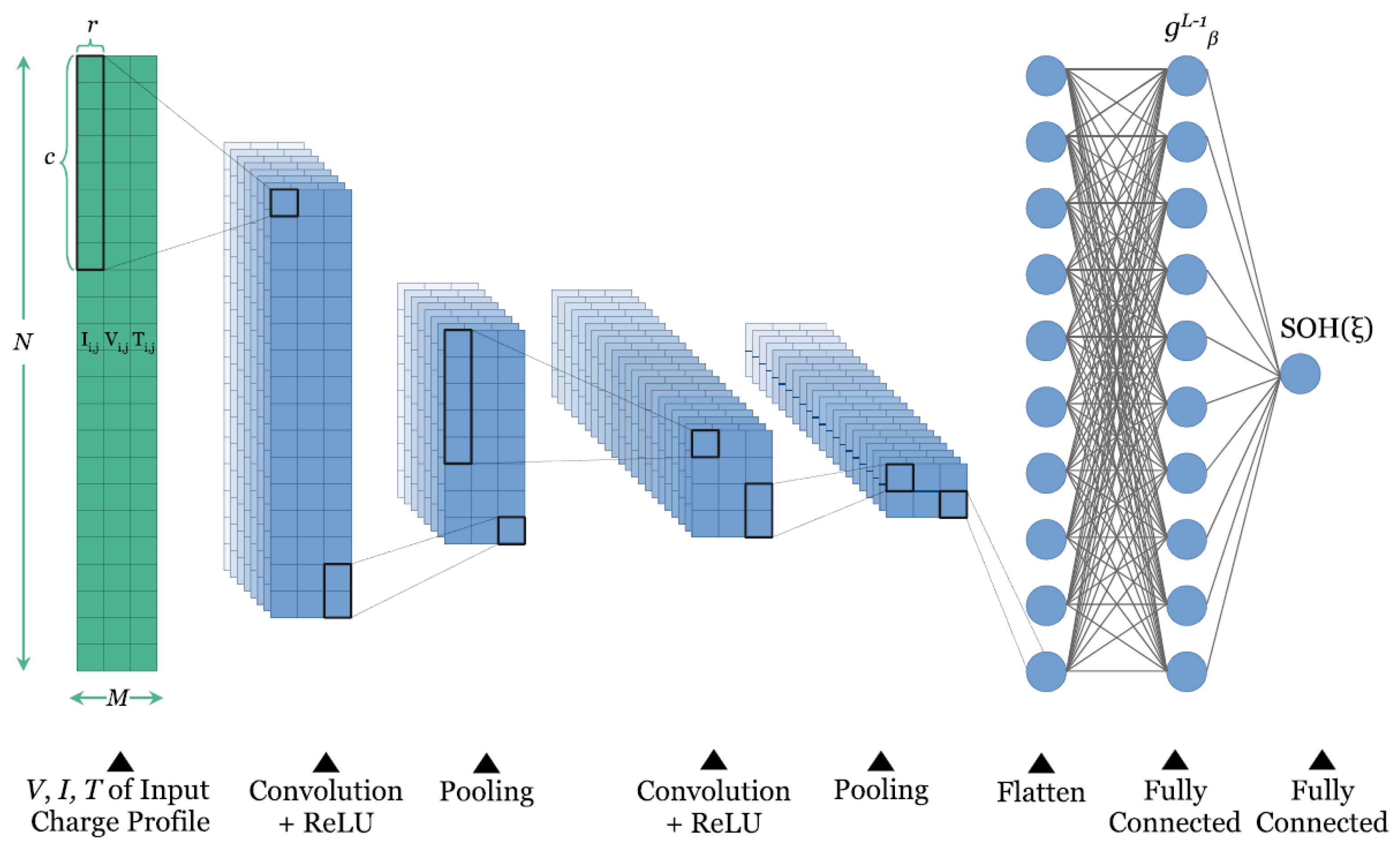
- A CNN is used to map raw battery measurements directly to SOH without the use of any physical or electrochemical models. The performance of the CNN is not limited by knowledge of the underlying electrochemical processes. Physical or electrochemical models are more challenging to create because they must include complex processes such as self-discharge, solid lithium concentrations, etc.
- A data augmentation technique is used to generate the training data used as inputs to the CNN. This not only makes the CNN more robust against measurement noise, offsets and gains but also increases the CNN’s SOH estimation accuracy.
- To further increase the CNN’s practicality in real-world applications, it is trained to estimate SOH over partial charge profiles having varying ranges of state of charge (SOC). This is an important feature increasing the practicality of this method considerably.
2. Background and Theory of Convolutional Neural Networks for SOH Estimation
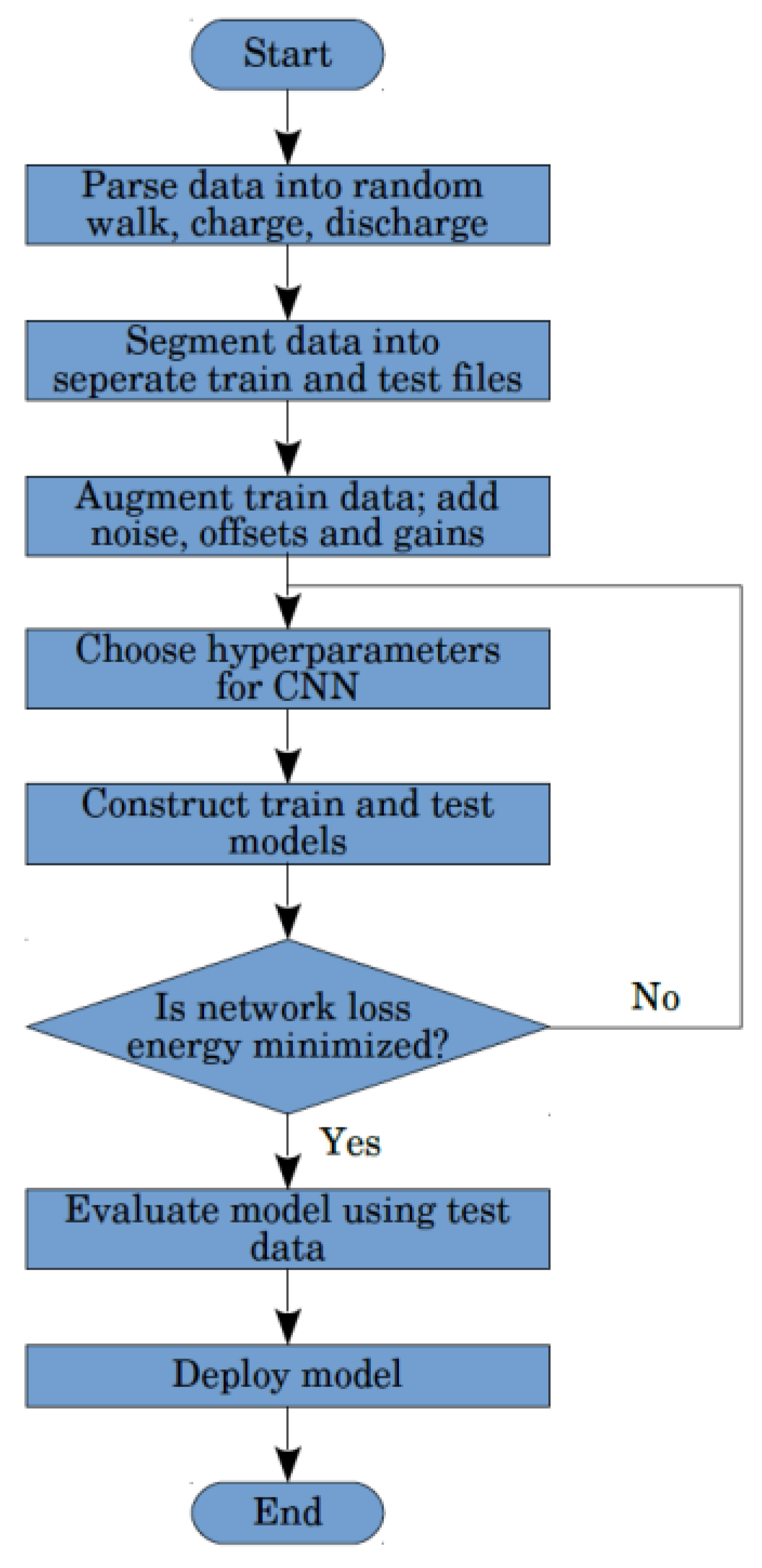
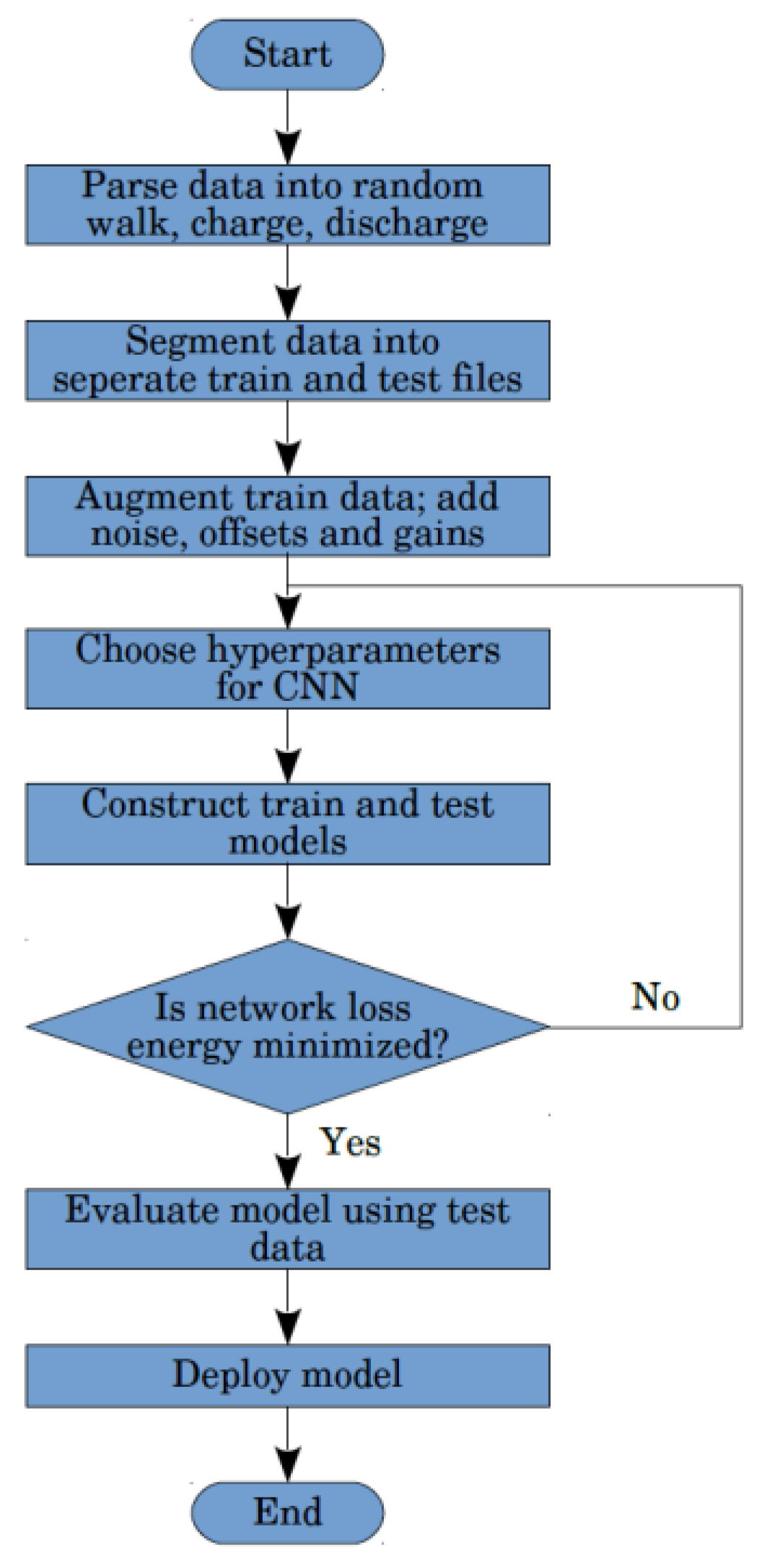
3. Methodology of Random Walk Aging Datasets and Data Preparation
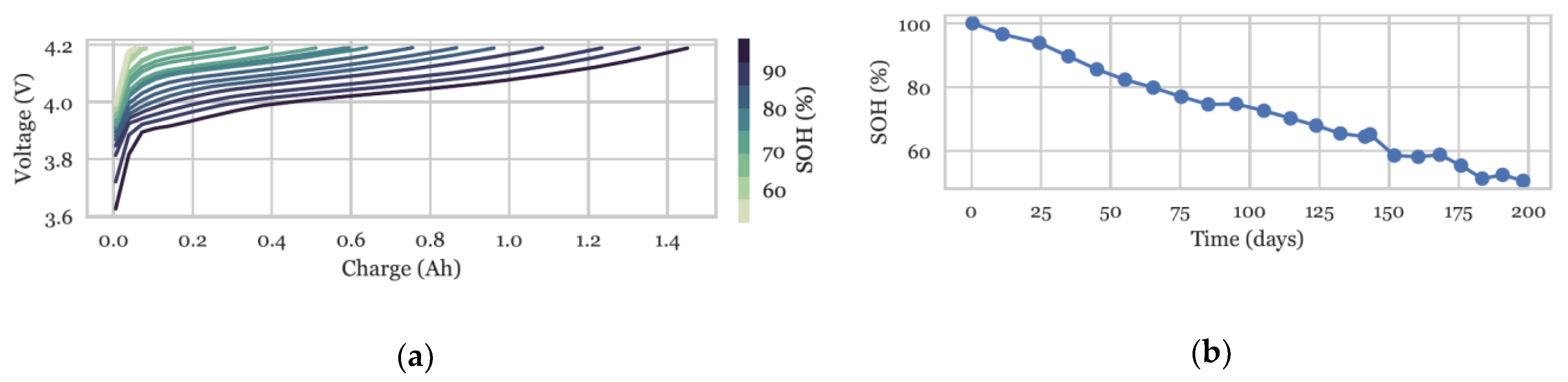
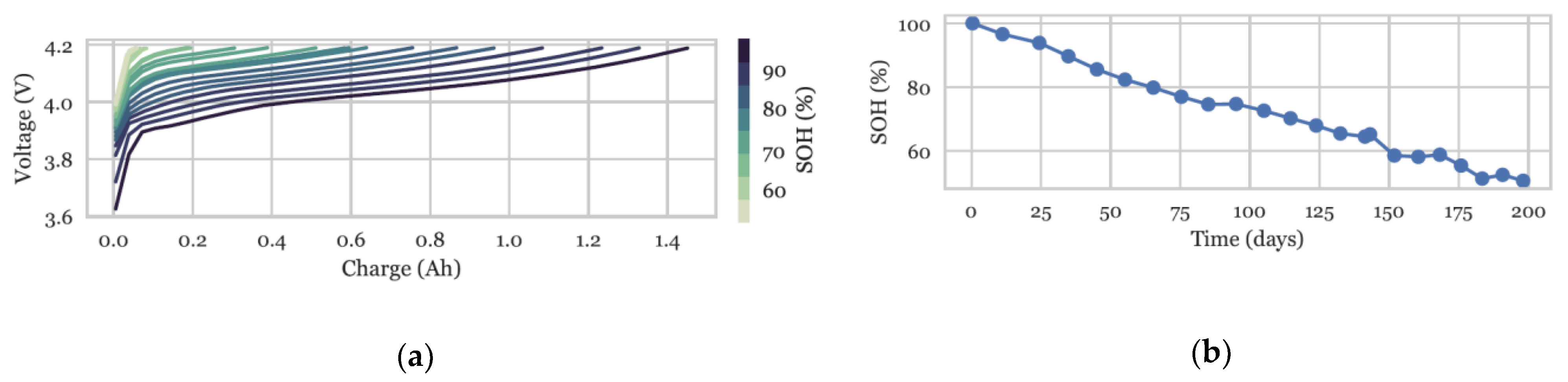
3.1. Randomized Battery Usage Datasets
3.2. Data Processing
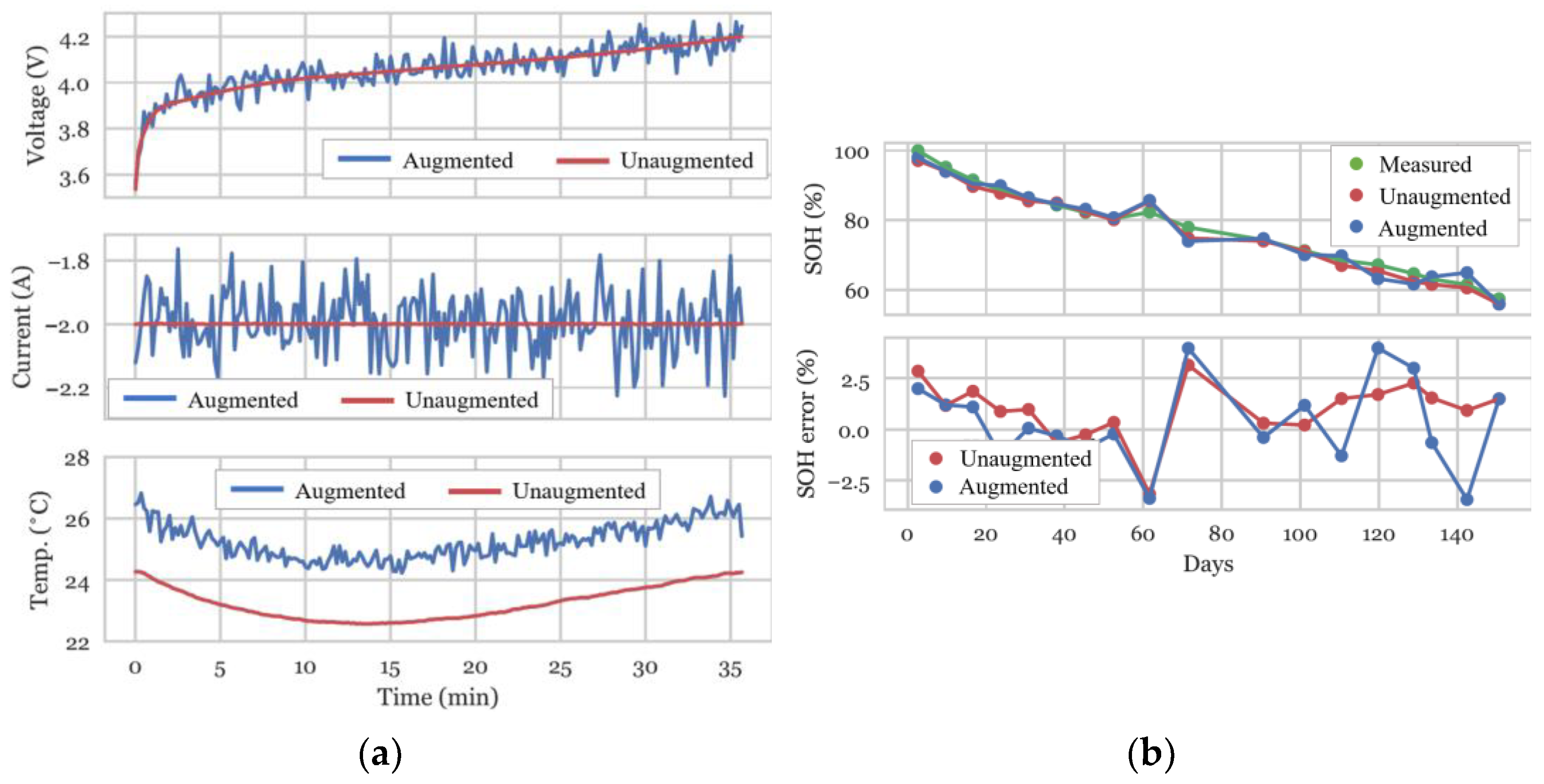
3.3. Training Data Augmentation
4. State of Health Estimation Results and Discussion
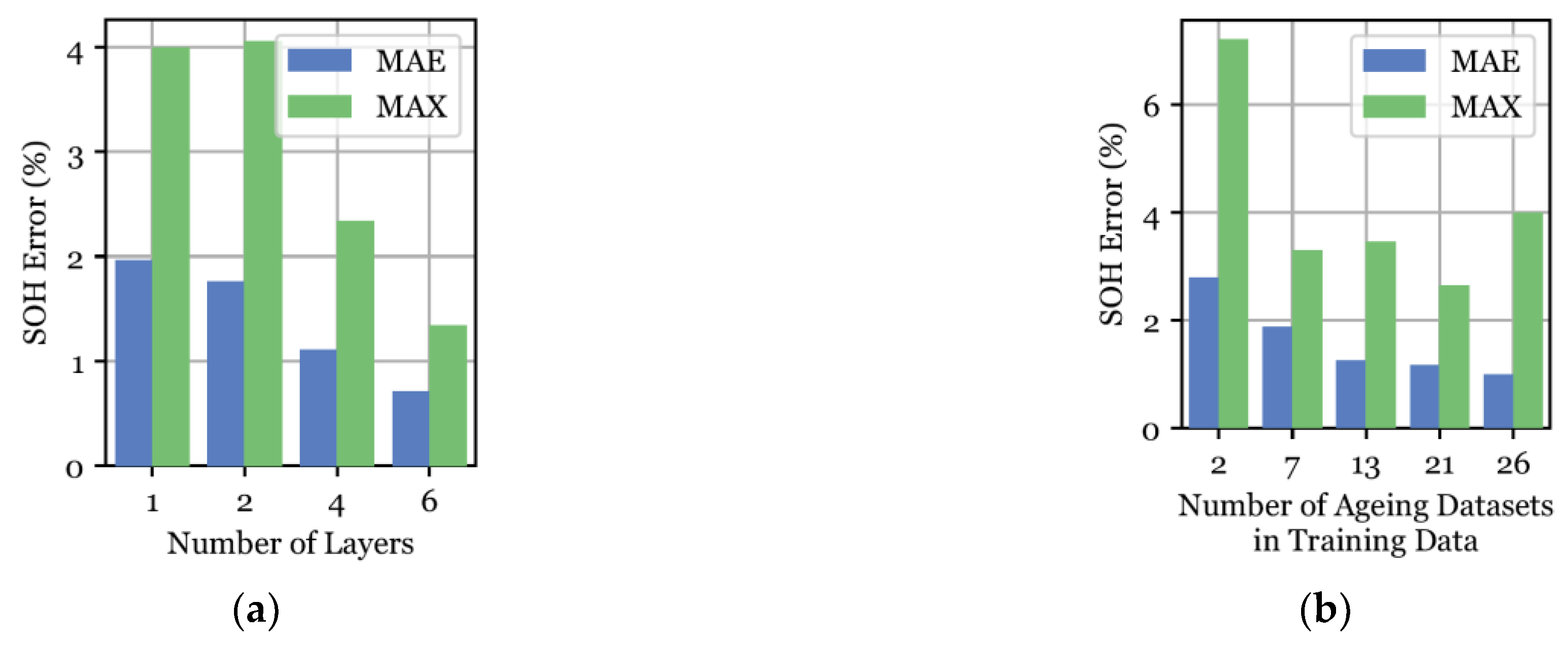
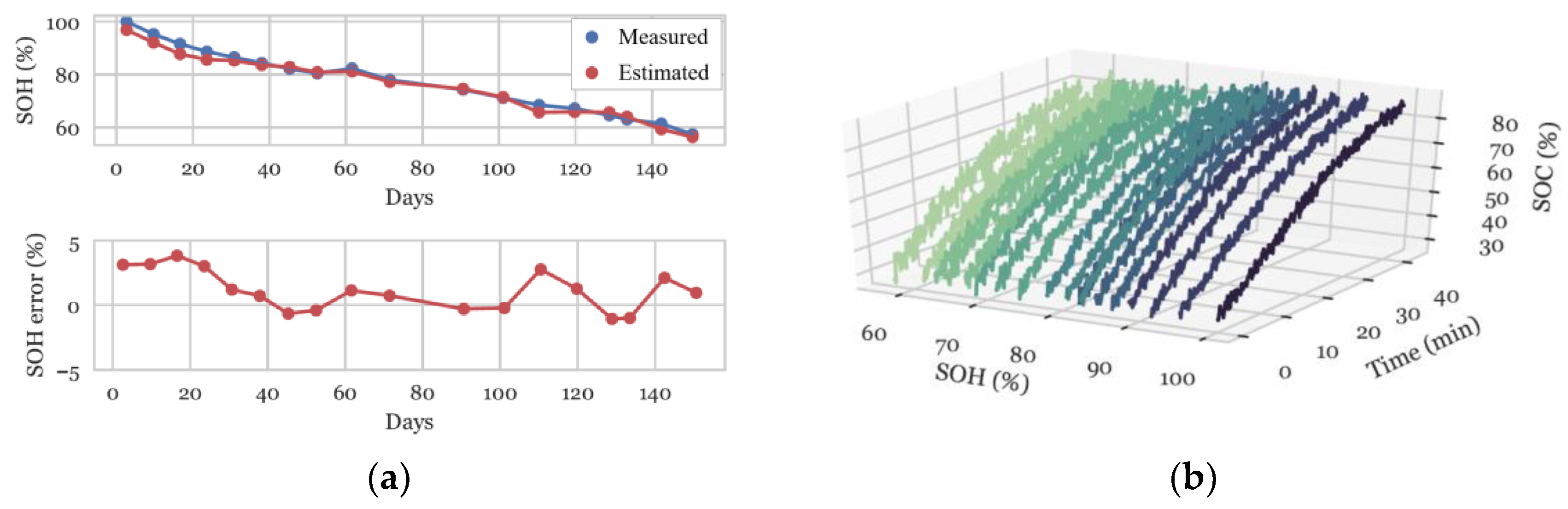
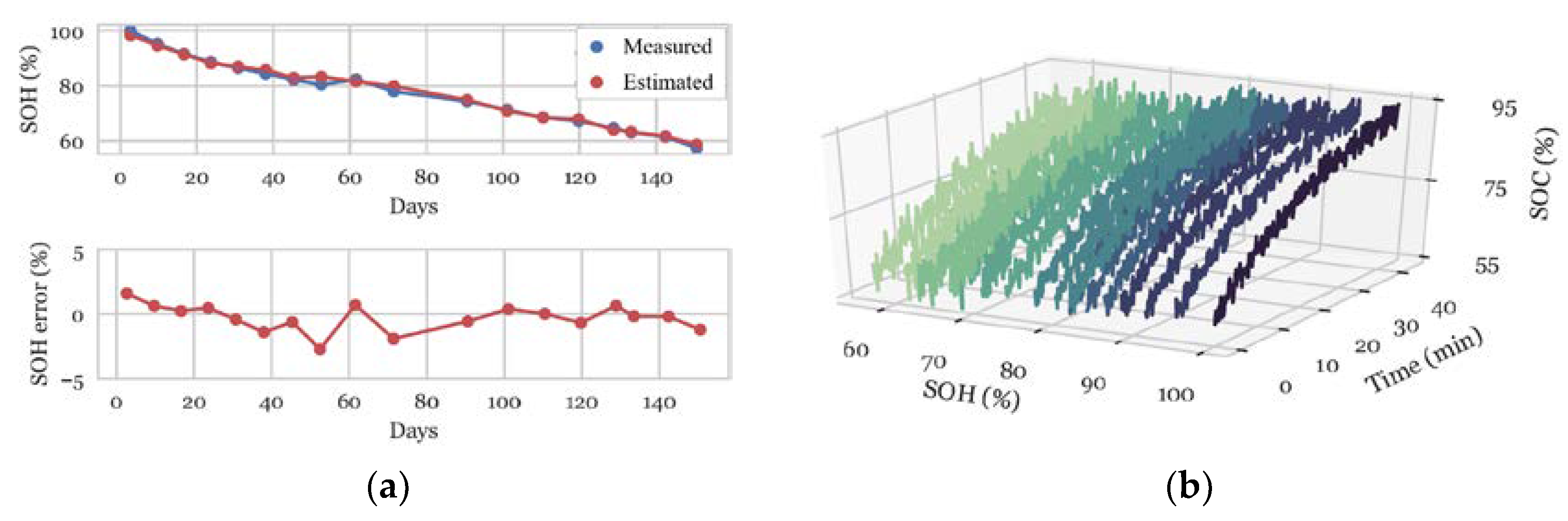
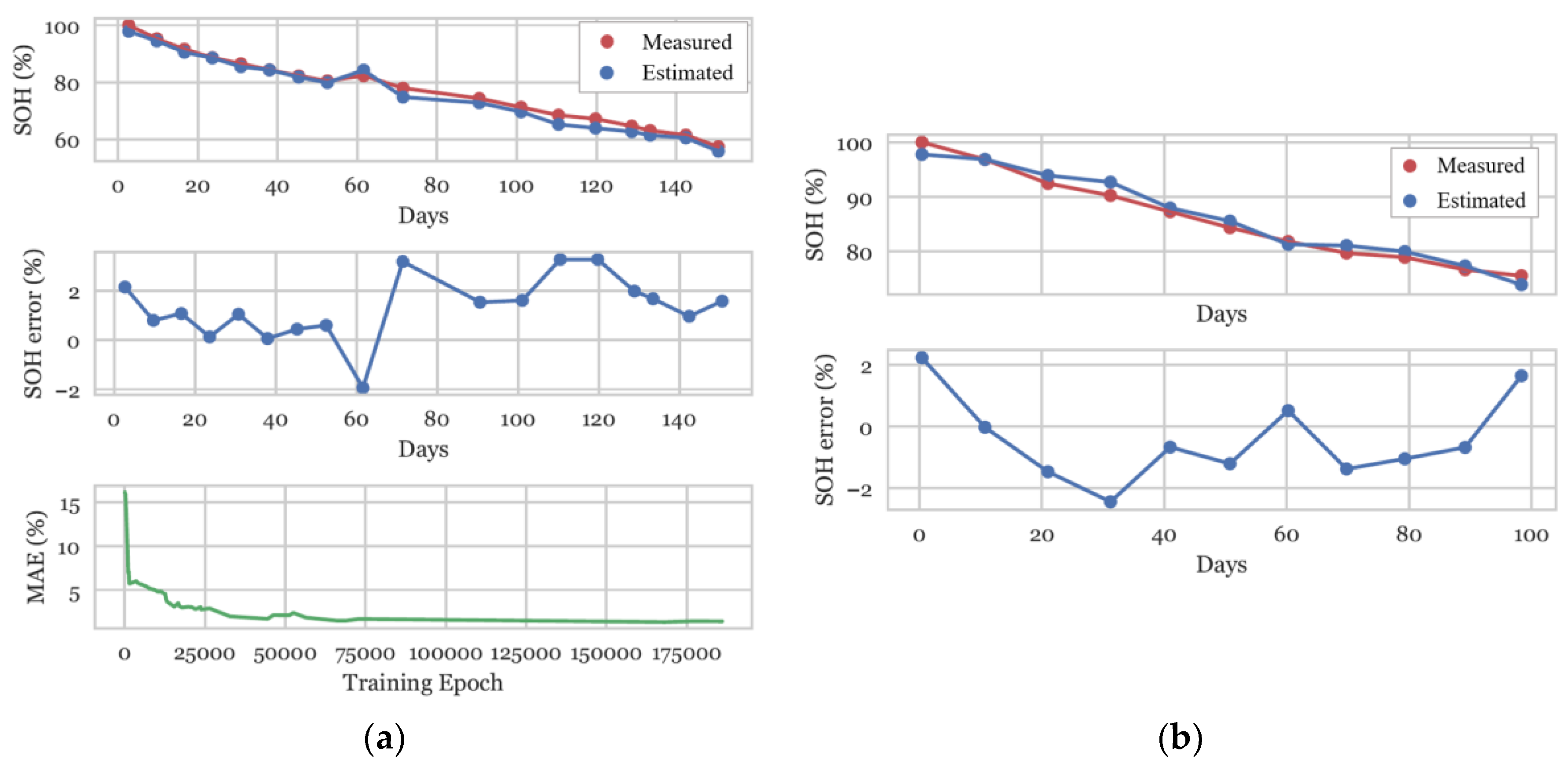
4.1. State-of-Health Estimation Using Fixed Charge Profiles
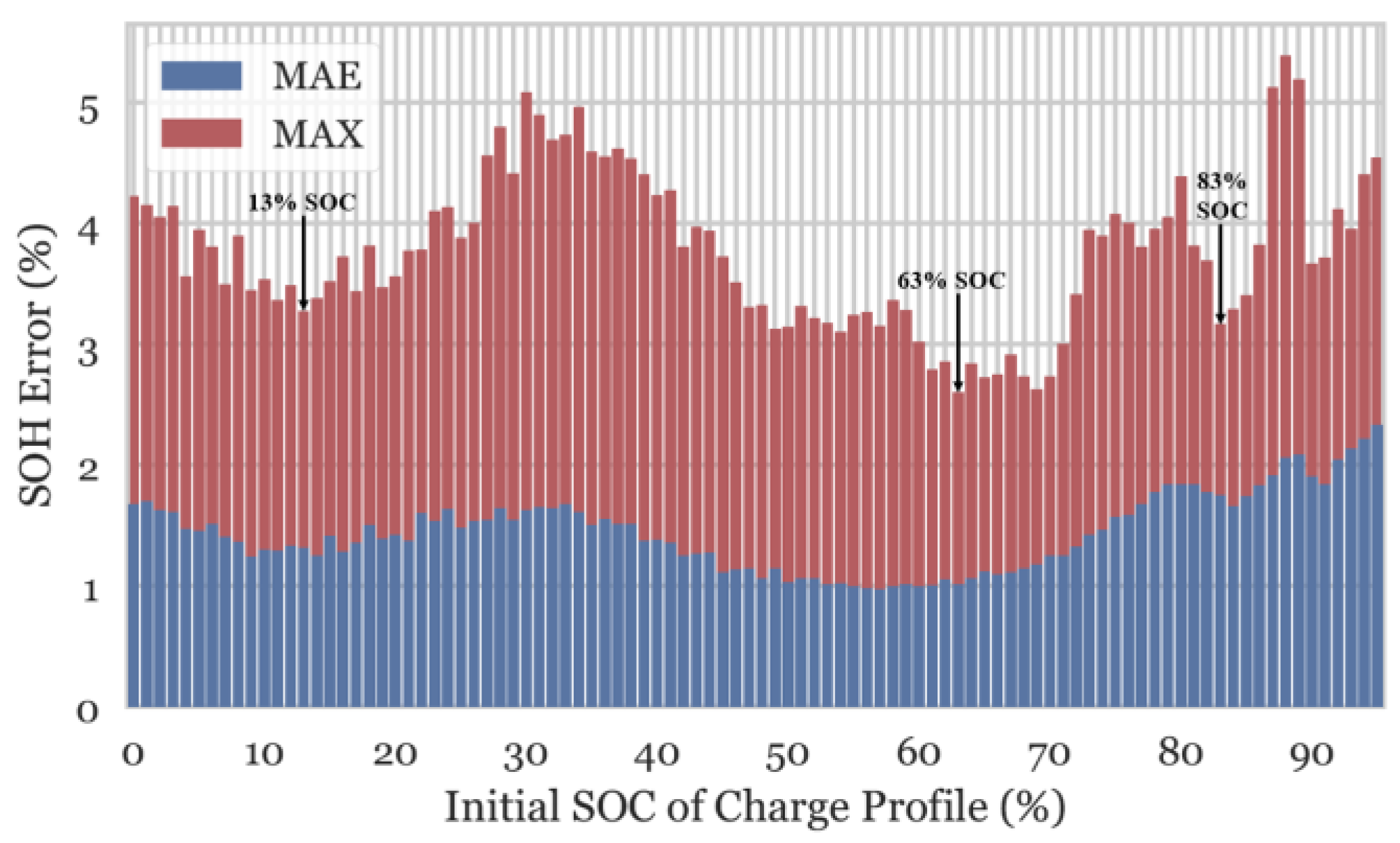
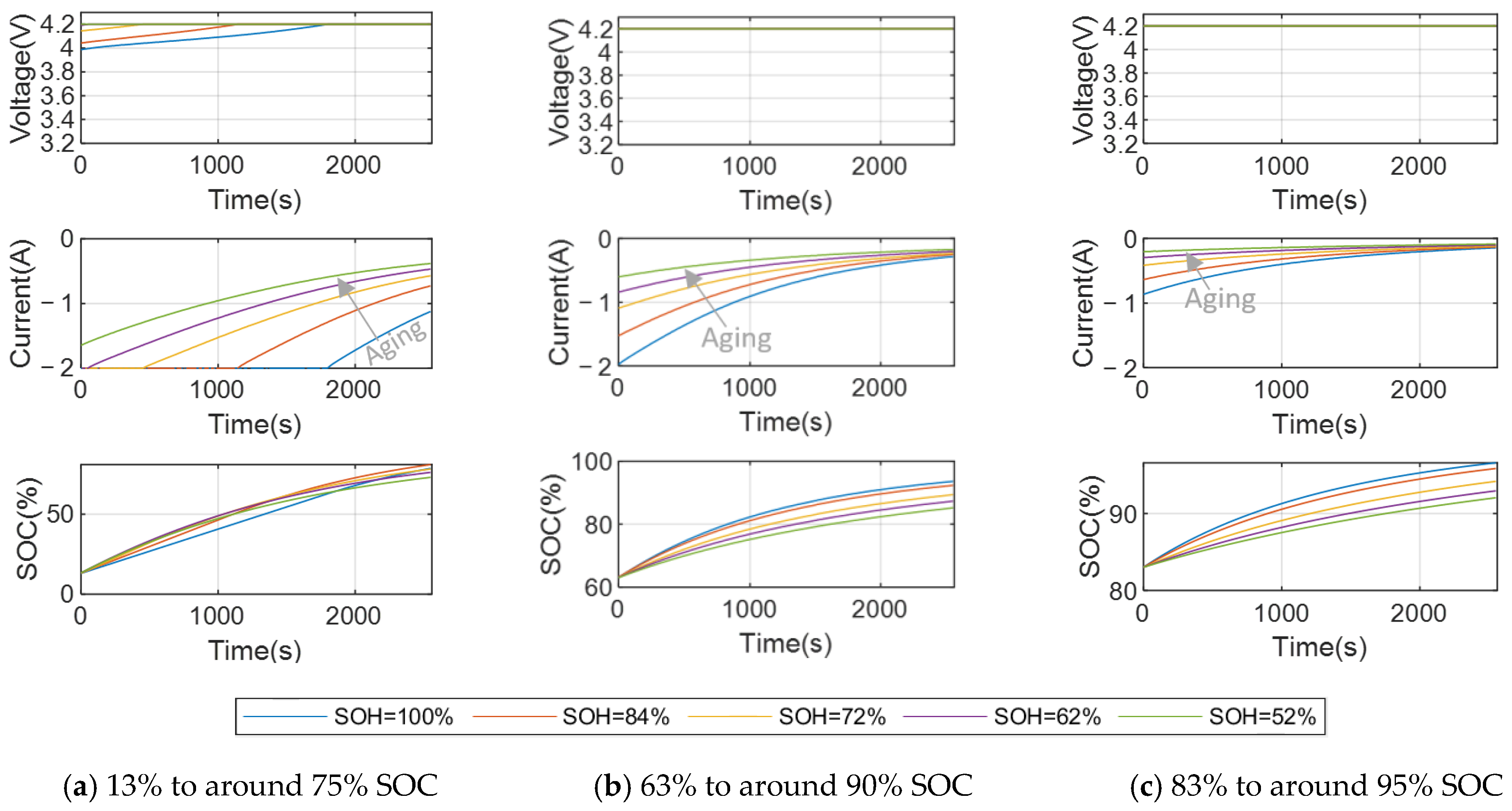
4.2. State-of-Health Estimation Using Partial Charge Profiles
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Emadi, A. Advanced Electric Drive Vehicles; CRC Press: New York, NY, USA, 2015. [Google Scholar]
- Rezvanizaniani, S.M.; Liu, Z.; Chen, Y.; Lee, J. Review and recent advances in battery health monitoring and prognostics technologies for electric vehicle (EV) safety and mobility. J. Power Sources 2014, 256, 110–124. [Google Scholar] [CrossRef]
- Chen, Z.; Mi, C.; Fu, Y.; Xu, J.; Gong, X. Online battery state of health estimation based on Genetic Algorithm for electric and hybrid vehicle applications. J. Power Sources 2013, 240, 184–192. [Google Scholar] [CrossRef]
- Yang, R.; Xiong, R.; He, H.; Mu, H.; Wang, C. A novel method on estimating the degradation and state of charge of lithium-ion batteries used for electrical vehicles. Appl. Energy 2017, 207, 336–345. [Google Scholar] [CrossRef]
- Ouyang, M.; Chu, Z.; Lu, L.; Li, J.; Han, X.; Feng, X.; Liu, G. Low temperature aging mechanism identification and lithium deposition in a large format lithium iron phosphate battery for different charge profiles. J. Power Sources 2015, 286, 309–320. [Google Scholar] [CrossRef]
- Ma, Z.; Wang, Z.; Xiong, R.; Jiang, J. A mechanism identification model based state-of-health diagnosis of lithium-ion batteries for energy storage applications. J. Clean. Prod. 2018, 193, 379–390. [Google Scholar] [CrossRef]
- Vidal, C.; Malysz, P.; Kollmeyer, P.; Emadi, A. Machine Learning Applied to Electrified Vehicle Battery State of Charge and State of Health Estimation: State-of-the-Art. IEEE Access 2020, 8, 52796–52814. [Google Scholar] [CrossRef]
- Sui, X.; He, S.; Vilsen, S.B.; Meng, J.; Teodorescu, R.; Stroe, D.-I. A review of non-probabilistic machine learning-based state of health estimation techniques for Lithium-ion battery. Appl. Energy 2021, 300, 117346. [Google Scholar] [CrossRef]
- Severson, K.A.; Attia, P.M.; Jin, N.; Perkins, N.; Jiang, B.; Yang, Z.; Chen, M.H.; Aykol, M.; Herring, P.K.; Fraggedakis, D.; et al. Data-driven prediction of battery cycle life before capacity degradation. Nat. Energy 2019, 4, 383–391. [Google Scholar] [CrossRef] [Green Version]
- Rastegarpanah, A.; Hathaway, J.; Stolkin, R. Rapid Model-Free State of Health Estimation for End-of-First-Life Electric Vehicle Batteries Using Impedance Spectroscopy. Energies 2021, 14, 2597. [Google Scholar] [CrossRef]
- Shen, S.; Sadoughi, M.; Chen, X.; Hong, M.; Hu, C. A deep learning method for online capacity estimation of lithium-ion batteries. J. Energy Storage 2019, 25, 100817. [Google Scholar] [CrossRef]
- Fan, Y.; Xiao, F.; Li, C.; Yang, G.; Tang, X. A novel deep learning framework for state of health estimation of lithium-ion battery. J. Energy Storage 2020, 32, 101741. [Google Scholar] [CrossRef]
- Yang, N.; Song, Z.; Hofmann, H.; Sun, J. Robust State of Health estimation of lithium-ion batteries using convolutional neural network and random forest. J. Energy Storage 2022, 48, 103857. [Google Scholar] [CrossRef]
- Jo, S.; Jung, S.; Roh, T. Battery State-of-Health Estimation Using Machine Learning and Preprocessing with Relative State-of-Charge. Energies 2021, 14, 7206. [Google Scholar] [CrossRef]
- Klass, V.; Behm, M.; Lindbergh, G. A support vector machine-based state-of-health estimation method for lithium-ion batteries under electric vehicle operation. J. Power Sources 2014, 270, 262–272. [Google Scholar] [CrossRef]
- Eddahech, A.; Briat, O.; Bertrand, N.; Deletage, J.-Y.; Vinassa, J.-M. Behavior and state-of-health monitoring of li-ion batteries using impedance spectroscopy and recurrent neural networks. Int. J. Electr. Power Energy Syst. 2012, 42, 487–494. [Google Scholar] [CrossRef]
- Feng, X.; Li, J.; Ouyang, M.; Lu, L.; Li, J.; He, X. Using probability density function to evaluate the state of health of lithium-ion batteries. J. Power Sources 2013, 232, 209–218. [Google Scholar] [CrossRef]
- Weng, C.; Cui, Y.; Sun, J.; Peng, H. On-board state of health monitoring of lithium-ion batteries using incremental capacity analysis with support vector regression. J. Power Sources 2013, 235, 36–44. [Google Scholar] [CrossRef]
- Wang, Z.; Ma, J.; Zhang, L. State-of-Health Estimation for Lithium-Ion Batteries Based on the Multi-Island Genetic Algorithm and the Gaussian Process Regression. IEEE Access 2017, 5, 21286–21295. [Google Scholar] [CrossRef]
- Guo, Z.; Qiu, X.; Hou, G.; Liaw, B.Y.; Zhang, C. State of health estimation for lithium ion batteries based on charging curves. J. Power Sources 2014, 249, 457–462. [Google Scholar] [CrossRef]
- Bole, B.; Kulkarni, C.S.; Daigle, M. Randomized Battery Usage Dataset; NASA Ames Prognostics Data Repository, Tech. Rep.; Ames Research Center: Mountain View, CA, USA, 2014.
- Deng, L. Deep Learning: Methods and Applications. Found. Trends Signal Processing 2014, 7, 197–387. [Google Scholar] [CrossRef] [Green Version]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016; Available online: http://www.deeplearningbook.org (accessed on 2 February 2022).
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. Adv. Neural Inf. Processing Syst. 2012, 25, 1–9. [Google Scholar] [CrossRef]
- Ciresan, D.; Meier, U.; Masci, J.; Schmidhuber, J. Multi-column deep neural network for traffic sign classification. Neural Netw. 2012, 32, 333–338. [Google Scholar] [CrossRef] [Green Version]
- Hinton, G.; Deng, L.; Yu, D.; Dahl, G.E.; Mohamed, A.-R.; Jaitly, N.; Senior, A.; Vanhoucke, V.; Nguyen, P.; Sainath, T.N.; et al. Deep Neural Networks for Acoustic Modeling in Speech Recognition: The Shared Views of Four Research Groups. IEEE Signal Process. Mag. 2012, 29, 82–97. [Google Scholar] [CrossRef]
- Ciregan, D.; Meier, U.; Schmidhuber, J. Multi-column deep neural networks for image classification. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 3642–3649. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Ma, J.; Sheridan, R.P.; Liaw, A.; Dahl, G.E.; Svetnik, V. Deep neural nets as a method for quantitative structureactivity relationships. J. Chem. Inf. Modeling 2015, 55, 263–274. [Google Scholar] [CrossRef]
- Leung, M.K.K.; Xiong, H.Y.; Lee, L.J.; Frey, B.J. Deep learning of the tissue-regulated splicing code. Bioinformatics 2014, 30, i121–i129. [Google Scholar] [CrossRef] [Green Version]
- Xiong, H.Y.; Alipanahi, B.; Lee, L.J.; Bretschneider, H.; Merico, D.; Yuen, R.K.C.; Hua, Y.; Gueroussov, S.; Najafabadi, H.S.; Hughes, T.R.; et al. The human splicing code reveals new insights into the genetic determinants of disease. Science 2015, 347, 1254806. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.; Khosla, A.; Gargeya, R.; Irshad, H.; Beck, A.H. Deep Learning for Identifying Metastatic Breast Cancer. arXiv, 2016; arXiv:1606.05718. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. CoRR, vol. abs/1412.6980. 2014. Available online: http://arxiv.org/abs/1412.6980 (accessed on 2 February 2022).
- Analog Devices. LTC6813-1. Analog Devices, Inc.: Wilmington, MA, USA, 2018. Revision: A. Available online: https://www.analog.com/media/en/technical-documentation/datasheets/LTC6813-1.pdf (accessed on 2 February 2022).
- LEM. Automotive Current Transducer Fluxgate Technology CAB 500-C/SP5, Version: 0; LEM Europe GmbH: Plan-les-Ouates, Switzerland, 2018.
- Murata. Thermistor NTC 10K; Murata Manufacturing Co., Ltd.: Kyoto, Japan, 2018. [Google Scholar]
- An, G. The Effects of Adding Noise During Backpropagation Training on a Generalization Performance. Neural Comput. 1996, 8, 643–674. [Google Scholar] [CrossRef]
- Srivastava, N.; Hinton, G.E.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A simple way to prevent neural networks from overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Capacity @ SOH = 100% | Min. 2.08 Ah/Typ. 2.15 Ah |
|---|---|
| Min/Max Voltage | 3.2 V/4.2 V |
| Min/Max Temperature | 15 °C/43 °C |
| Charge Current (CC) | 2.0 A |
| Random Walk Current | Min. −4.5 A/Max. 5.0 A |
| Validation Dataset | MAE (%) | STDDEV (%) | MAX (%) |
|---|---|---|---|
| Validation RW dataset (25 °C) | 1.5 | 1.0 | 3.3 |
| Validation RW dataset (40 °C) | 1.2 | 0.7 | 2.4 |
| Case Study | MAE (%) | STDDEV (%) | MAX (%) | Parameters (Millions) |
|---|---|---|---|---|
| Input: voltage 1 | 1.5 | 1.1 | 3.9 | 3.8 |
| Input: voltage, current, temperature 1 | 1.0 | 0.6 | 2.2 | 3.8 |
| No pooling 1 | 1.3 | 0.8 | 3.4 | 3.8 |
| Pooling 1 | 1.0 | 0.6 | 2.2 | 3.8 |
| Unaugmented training data 2 | 2.4 | 1.1 | 4.2 | 3.6 |
| Augmented training data 2 | 1.2 | 1.1 | 3.6 | 3.6 |
| Smallest CNN 3 | 1.9 | 1.6 | 6.1 | 0.1 |
| Validation Data Augmentation | MAE (%) | STDDEV (%) | MAX (%) |
|---|---|---|---|
| No | 1.4 | 0.9 | 3.2 |
| Yes 1 | 1.7 | 1.3 | 4.0 |
| SOC Range | MAE (%) | STDDEV (%) | MAX (%) |
|---|---|---|---|
| 25 to 84% | 1.6 | 1.1 | 3.6 |
| 40 to 89% | 1.6 | 1.0 | 3.5 |
| 60 to 92% | 0.8 | 0.7 | 2.7 |
| 85 to 97% | 1.6 | 0.9 | 3.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chemali, E.; Kollmeyer, P.J.; Preindl, M.; Fahmy, Y.; Emadi, A. A Convolutional Neural Network Approach for Estimation of Li-Ion Battery State of Health from Charge Profiles. Energies 2022, 15, 1185. https://doi.org/10.3390/en15031185
Chemali E, Kollmeyer PJ, Preindl M, Fahmy Y, Emadi A. A Convolutional Neural Network Approach for Estimation of Li-Ion Battery State of Health from Charge Profiles. Energies. 2022; 15(3):1185. https://doi.org/10.3390/en15031185
Chicago/Turabian StyleChemali, Ephrem, Phillip J. Kollmeyer, Matthias Preindl, Youssef Fahmy, and Ali Emadi. 2022. "A Convolutional Neural Network Approach for Estimation of Li-Ion Battery State of Health from Charge Profiles" Energies 15, no. 3: 1185. https://doi.org/10.3390/en15031185
APA StyleChemali, E., Kollmeyer, P. J., Preindl, M., Fahmy, Y., & Emadi, A. (2022). A Convolutional Neural Network Approach for Estimation of Li-Ion Battery State of Health from Charge Profiles. Energies, 15(3), 1185. https://doi.org/10.3390/en15031185