


Performance Analysis and Optimization of a Novel Outer Rotor Field-Excited Flux-Switching Machine with Combined Semi-Closed and Open Slots Stator

 ,
, 
 , and
, and
Abstract
1. Introduction
2. Design Topology and Operating Principles
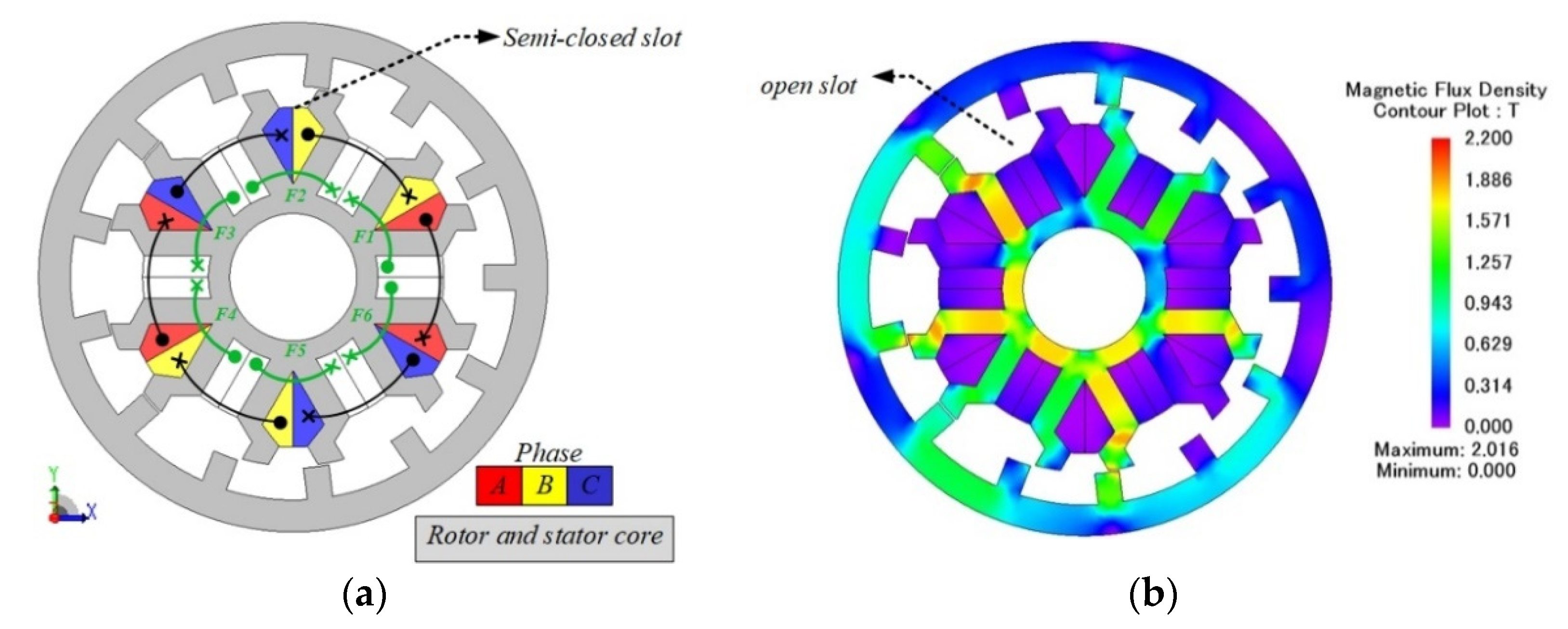
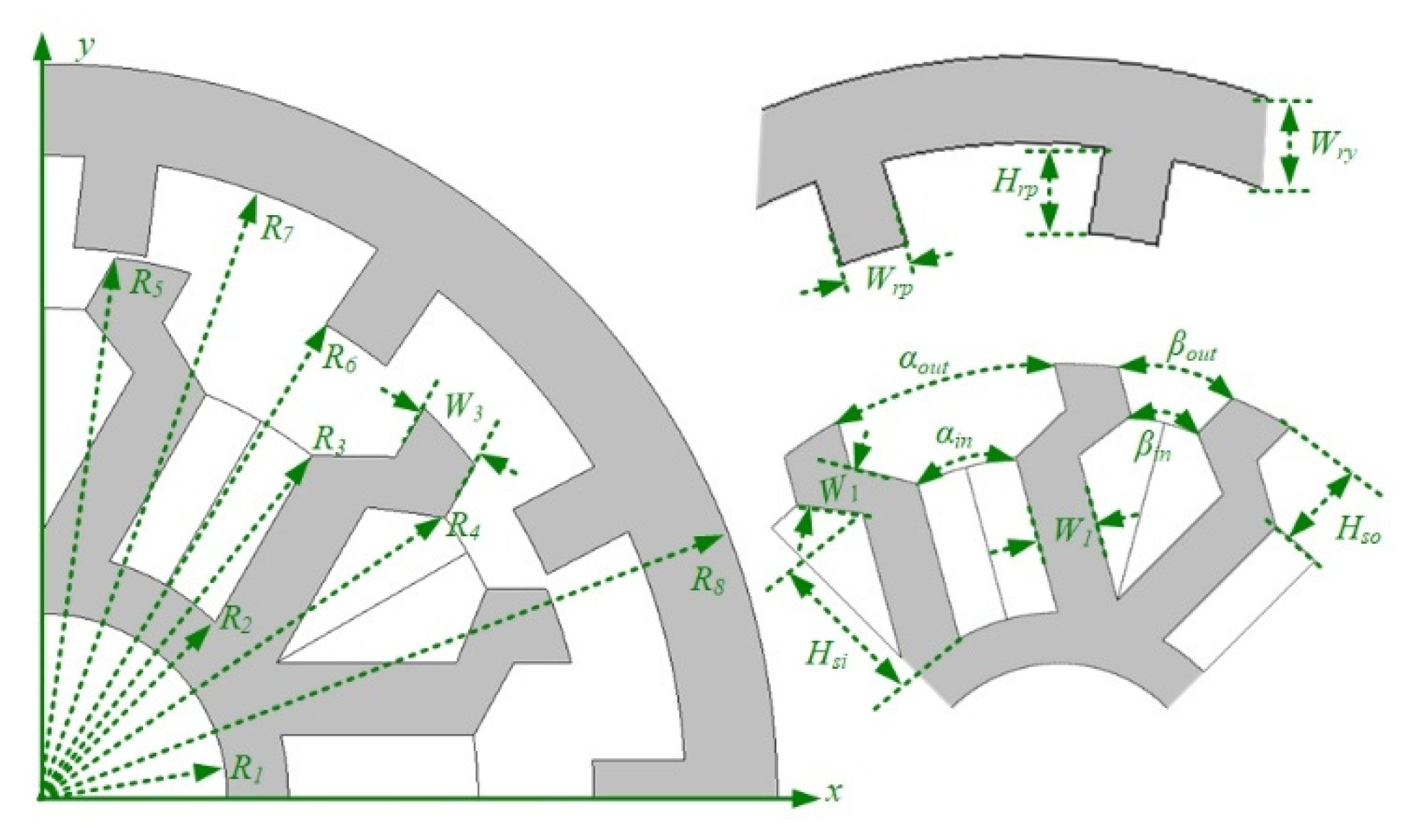
2.1. Design Topology
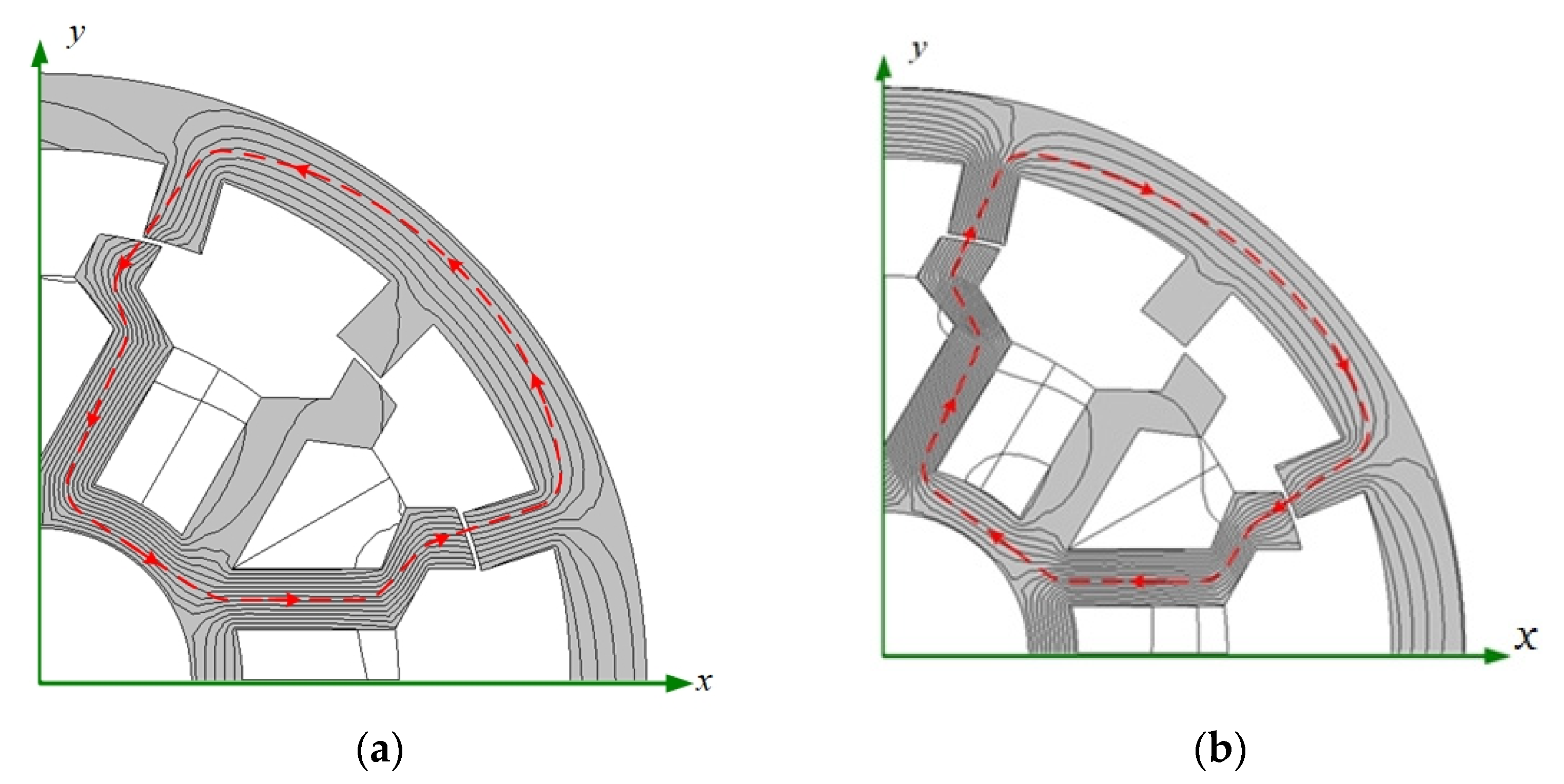
2.2. Operating Principles
2.3. Rotor Poles Combination
3. Performance Analysis of Feasible Rotor Pole Combination
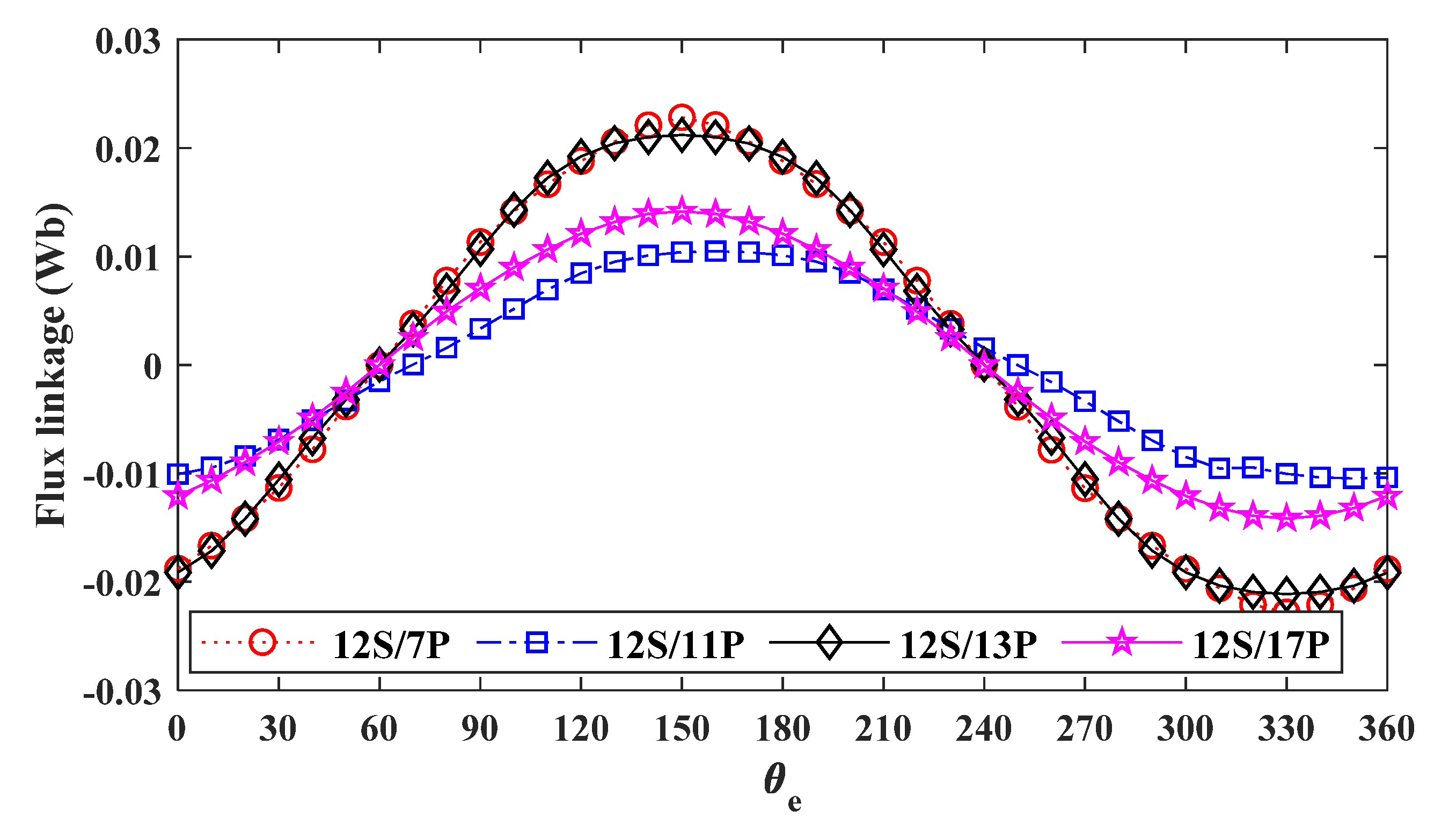
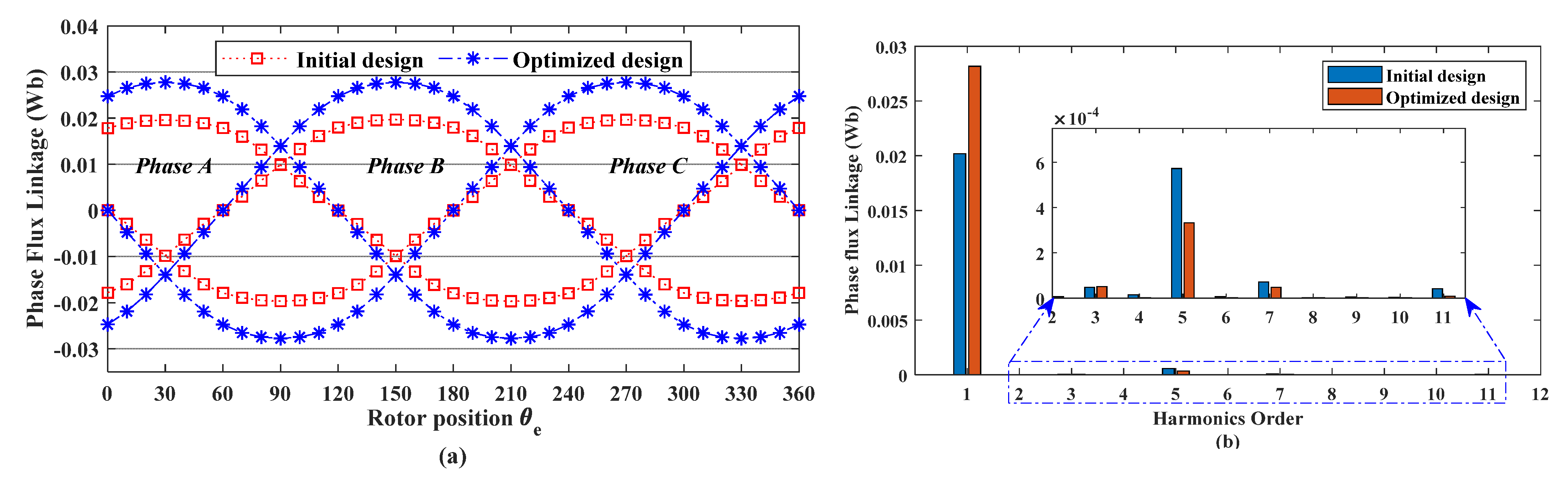
3.1. No Load Flux Linkage
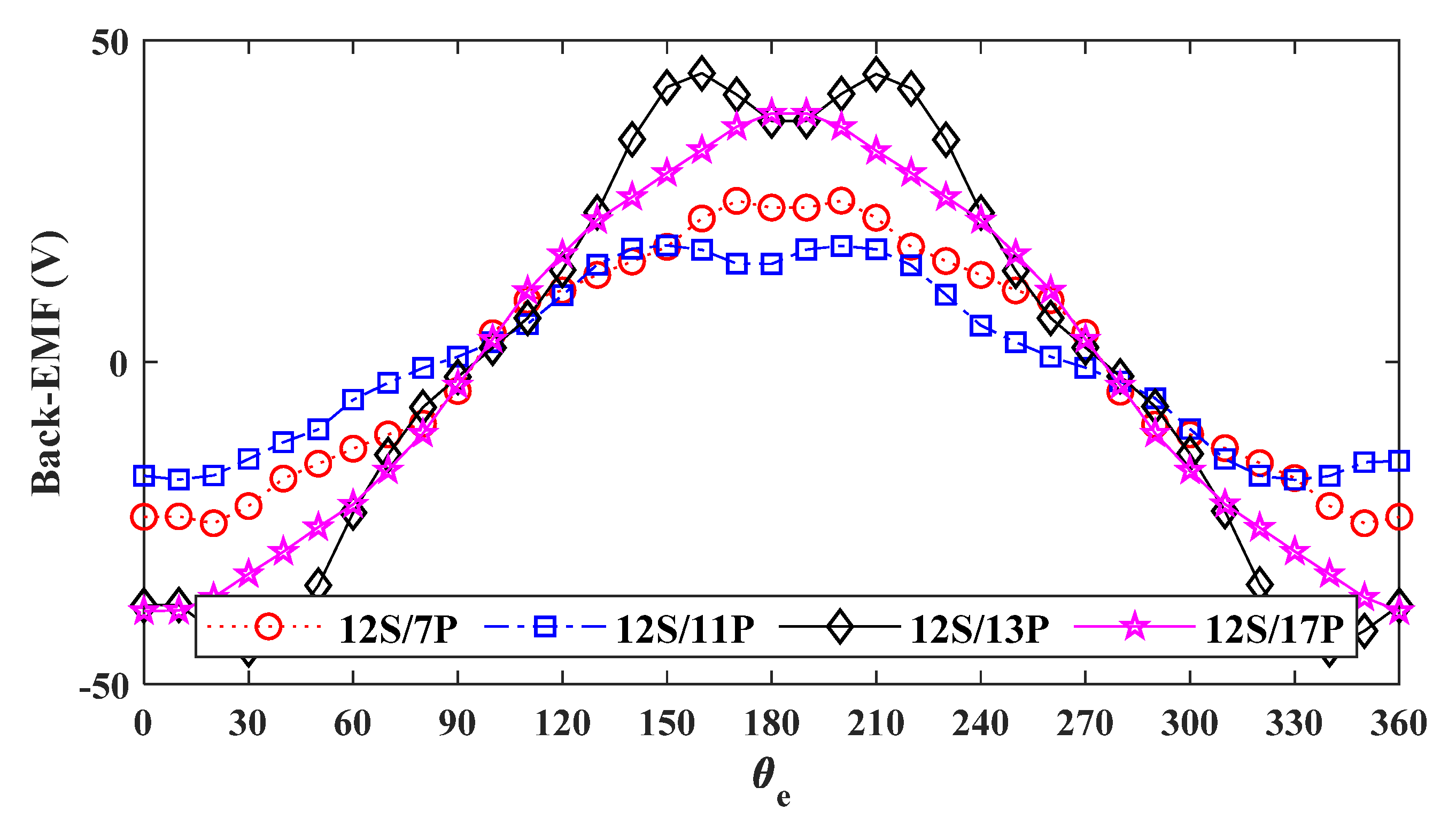
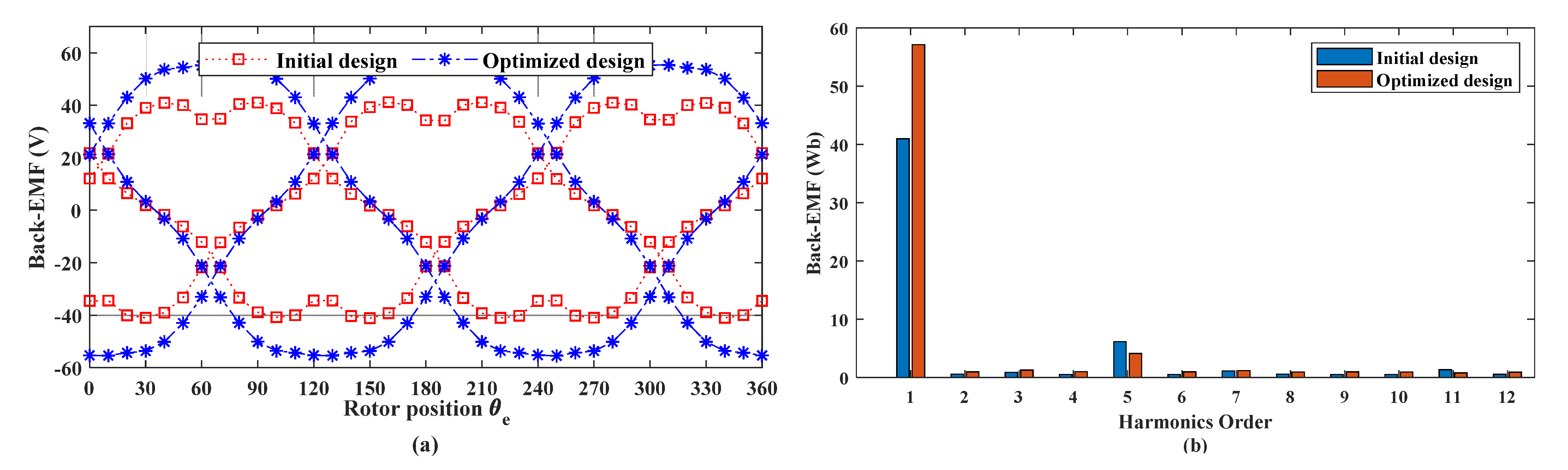
3.2. No Load Back-EMF
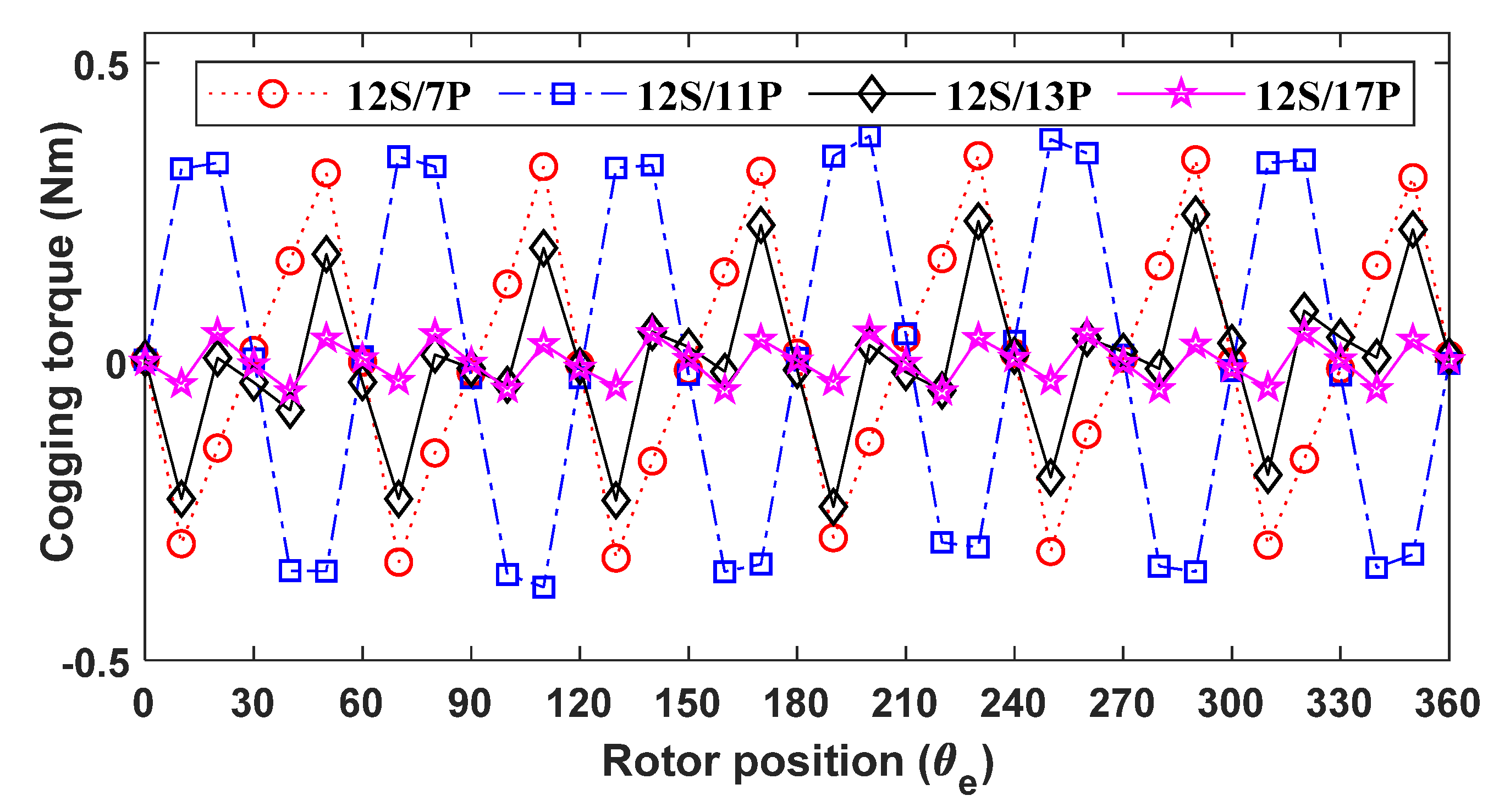
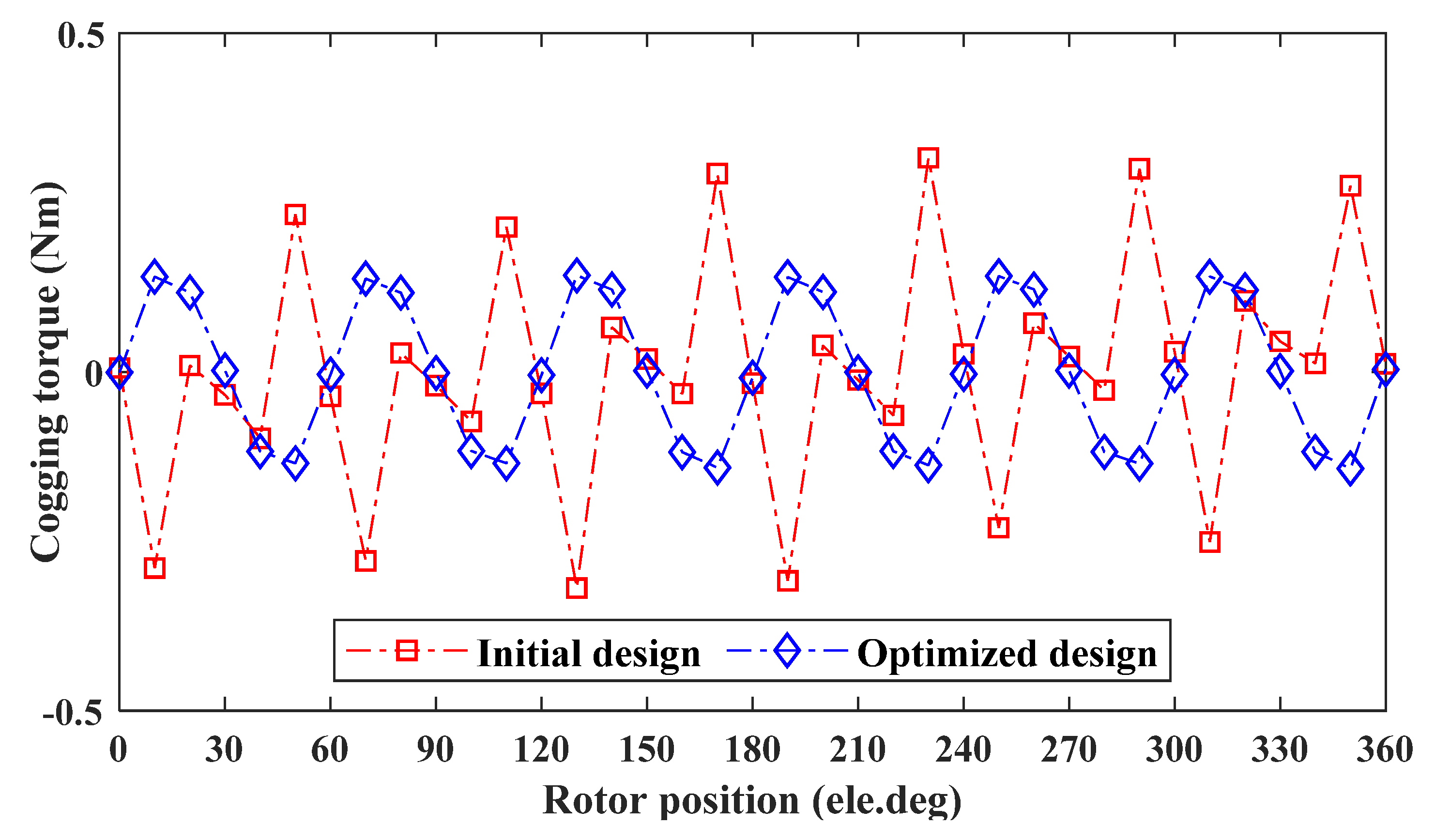
3.3. Cogging Torque
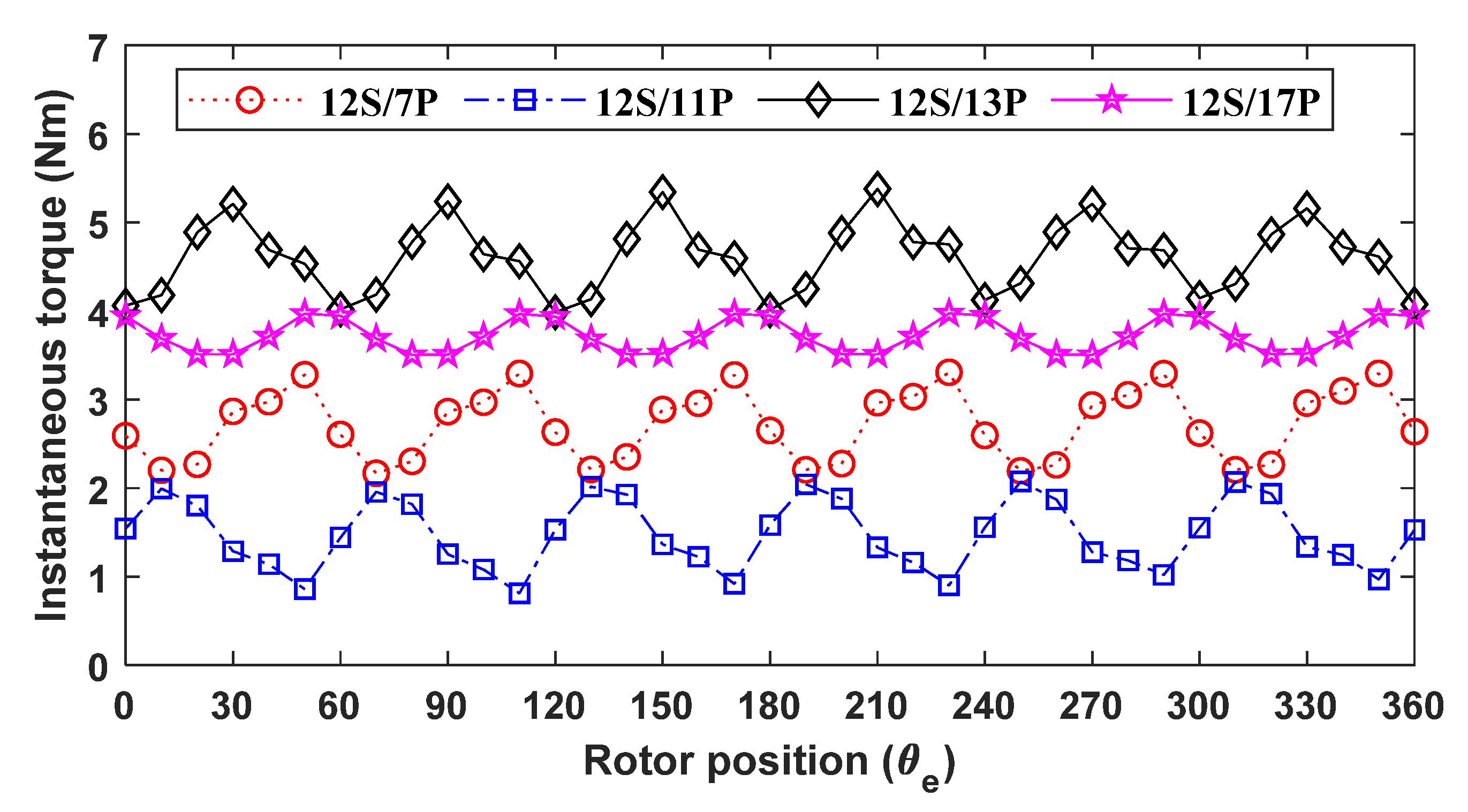
3.4. Instantenous Torque
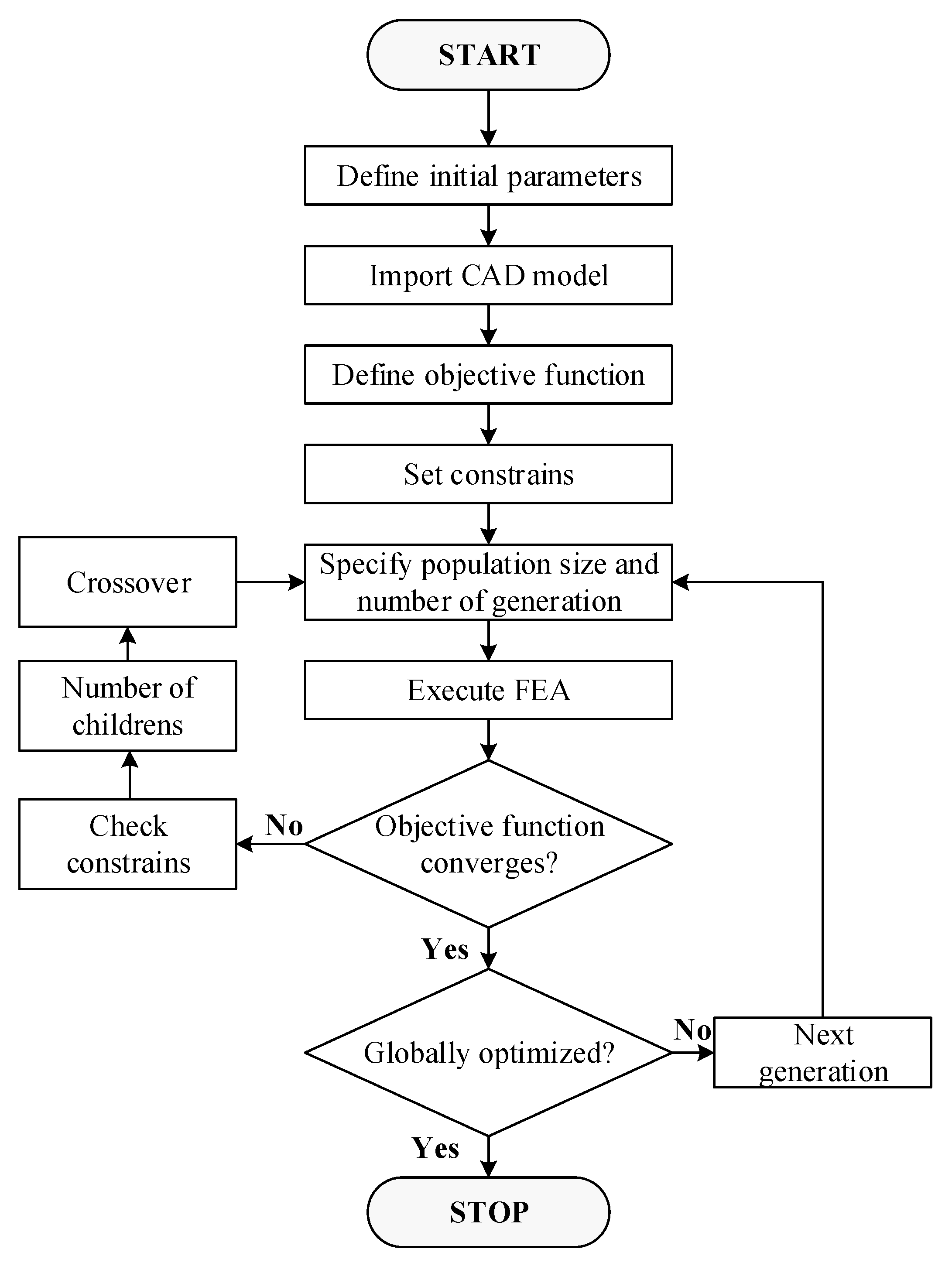
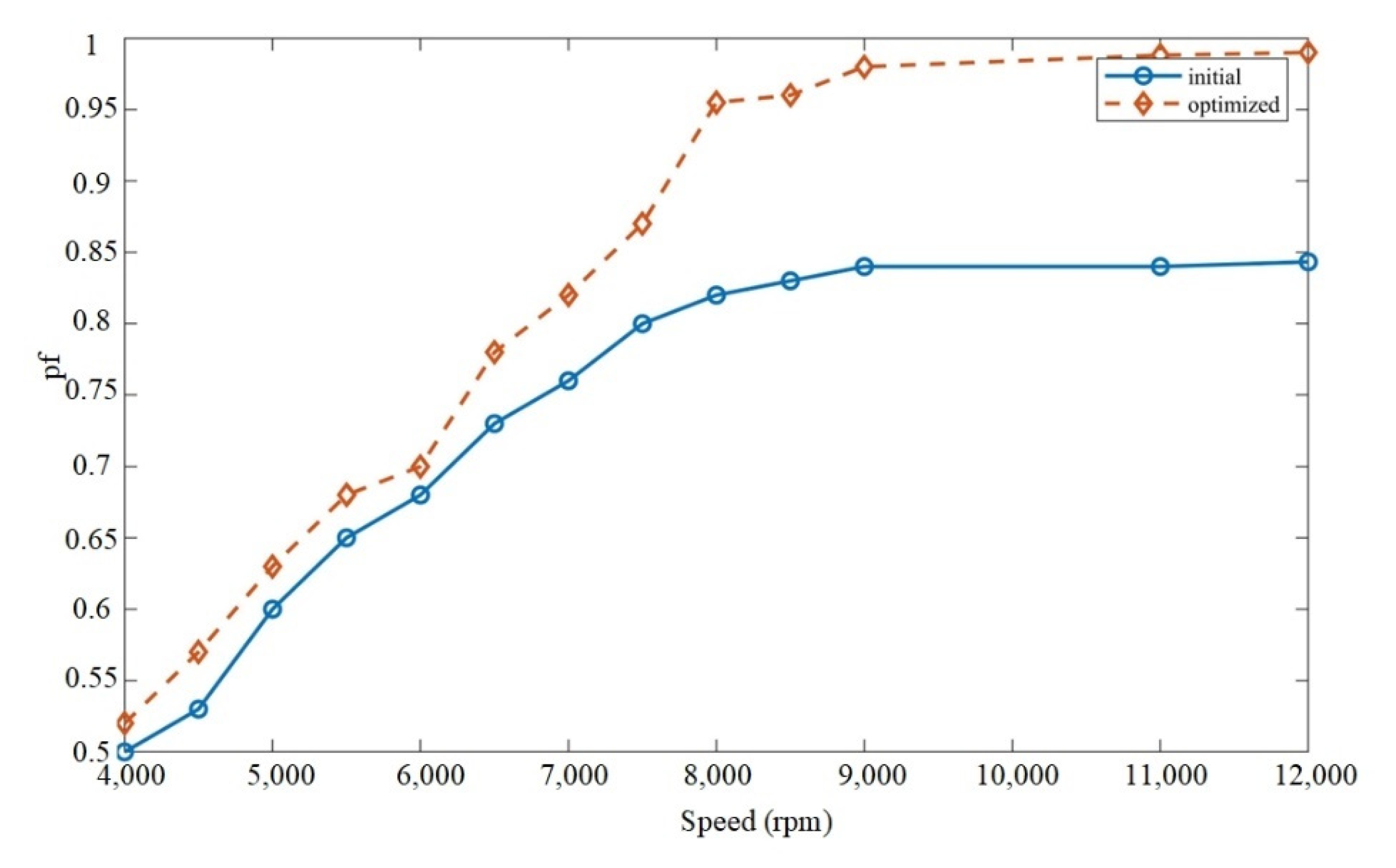
4. Genetic Optimization
5. FEA Based Electromagnetic Performance of Optimized Design
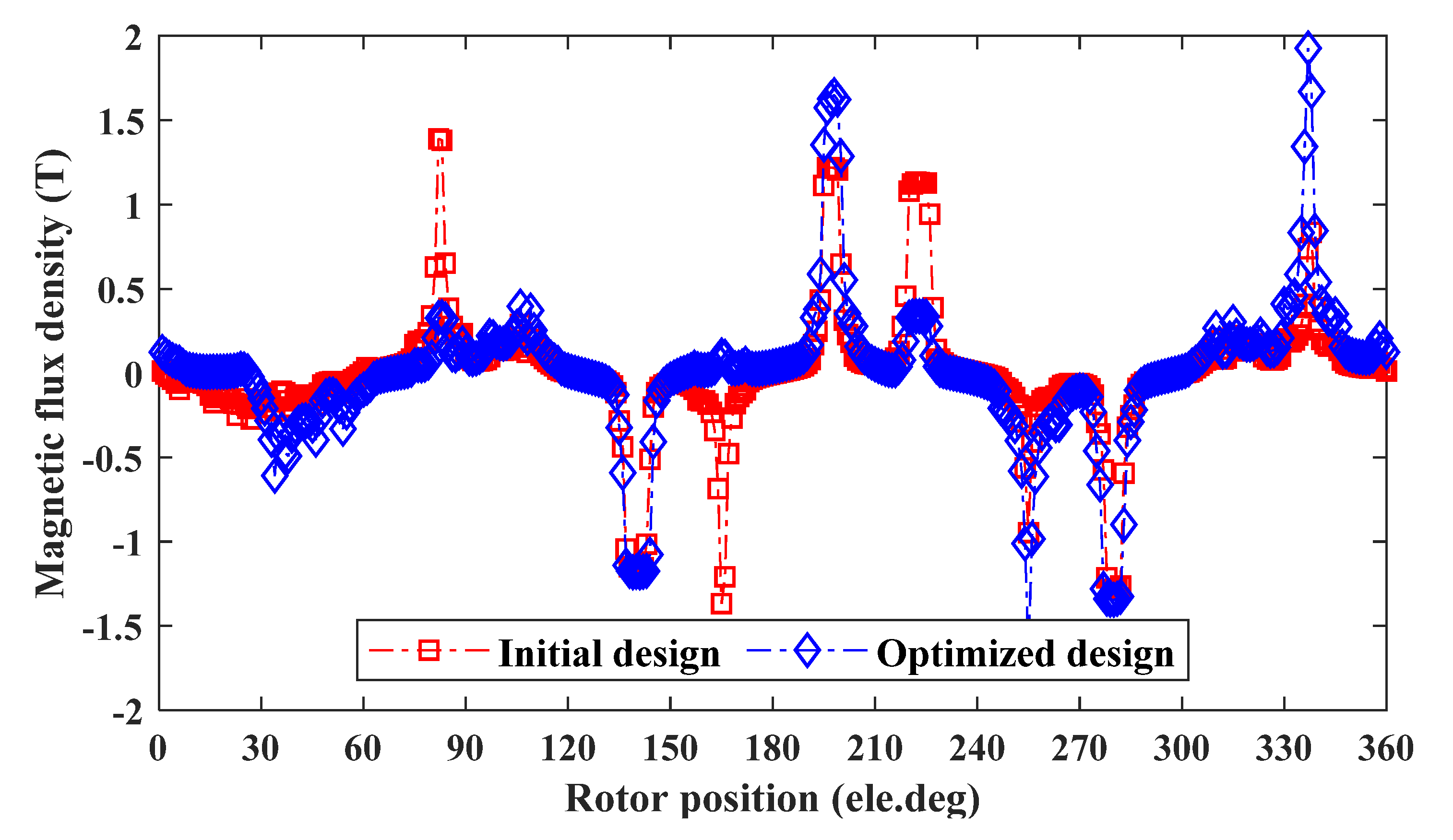
5.1. No Load Analysis
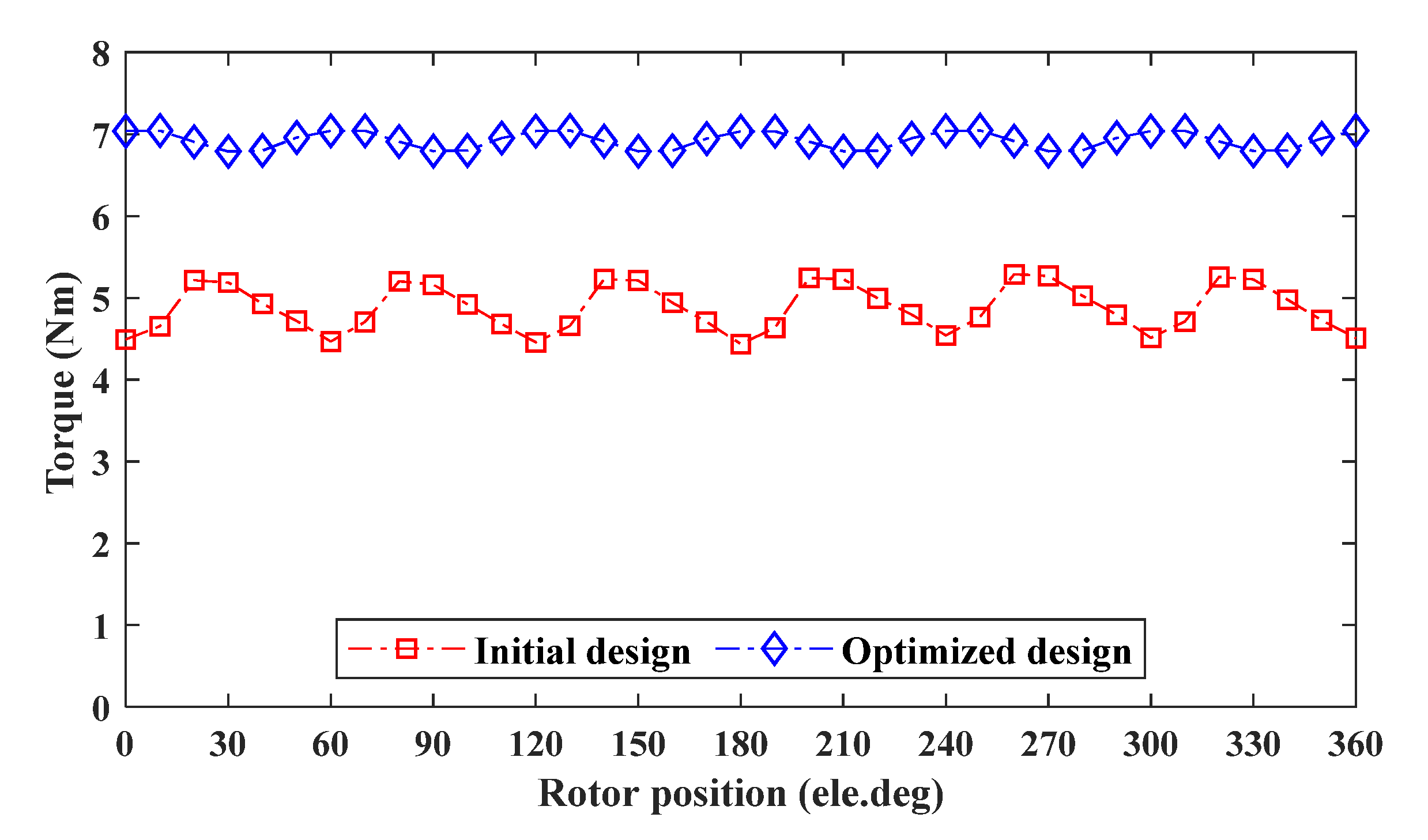
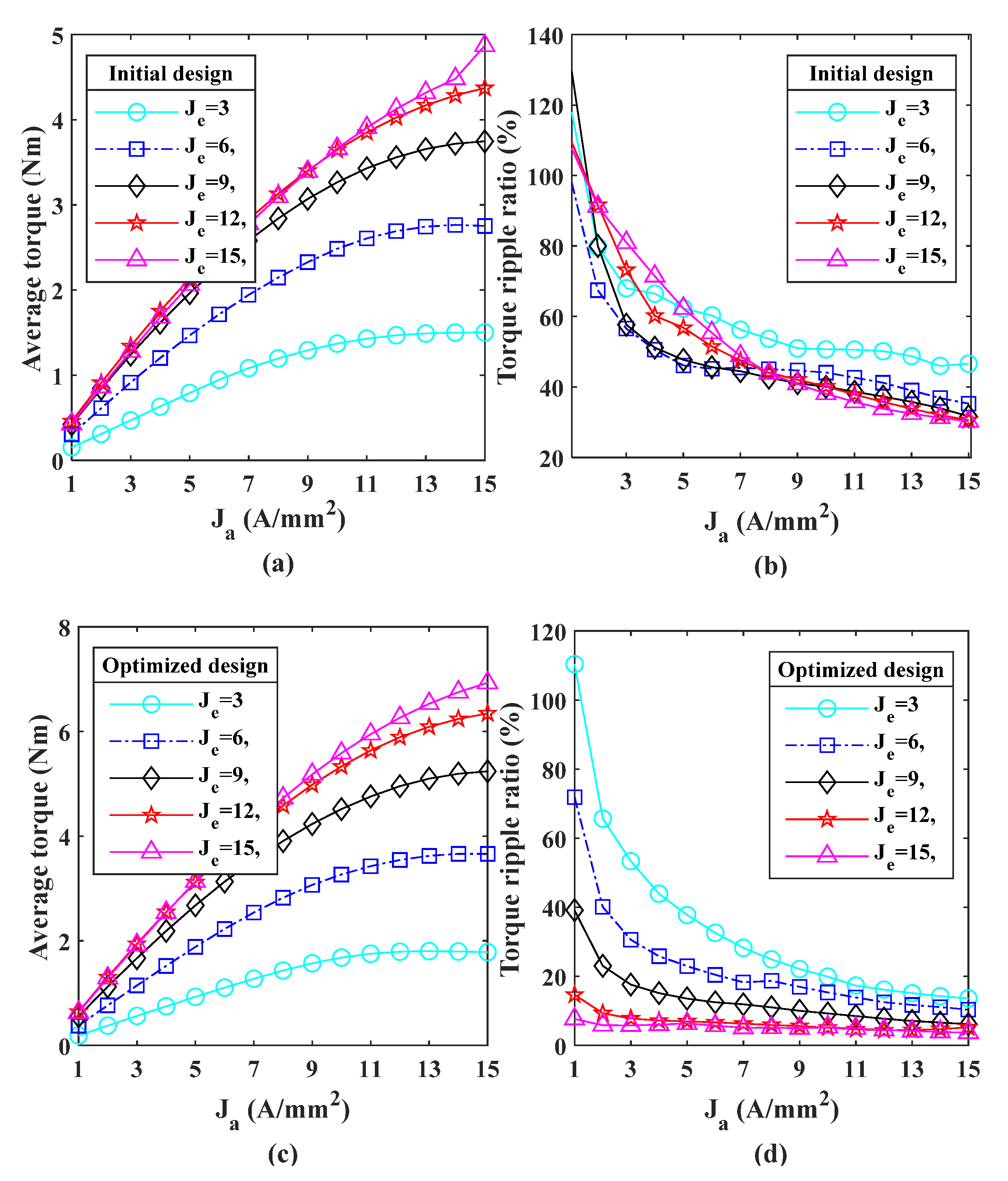
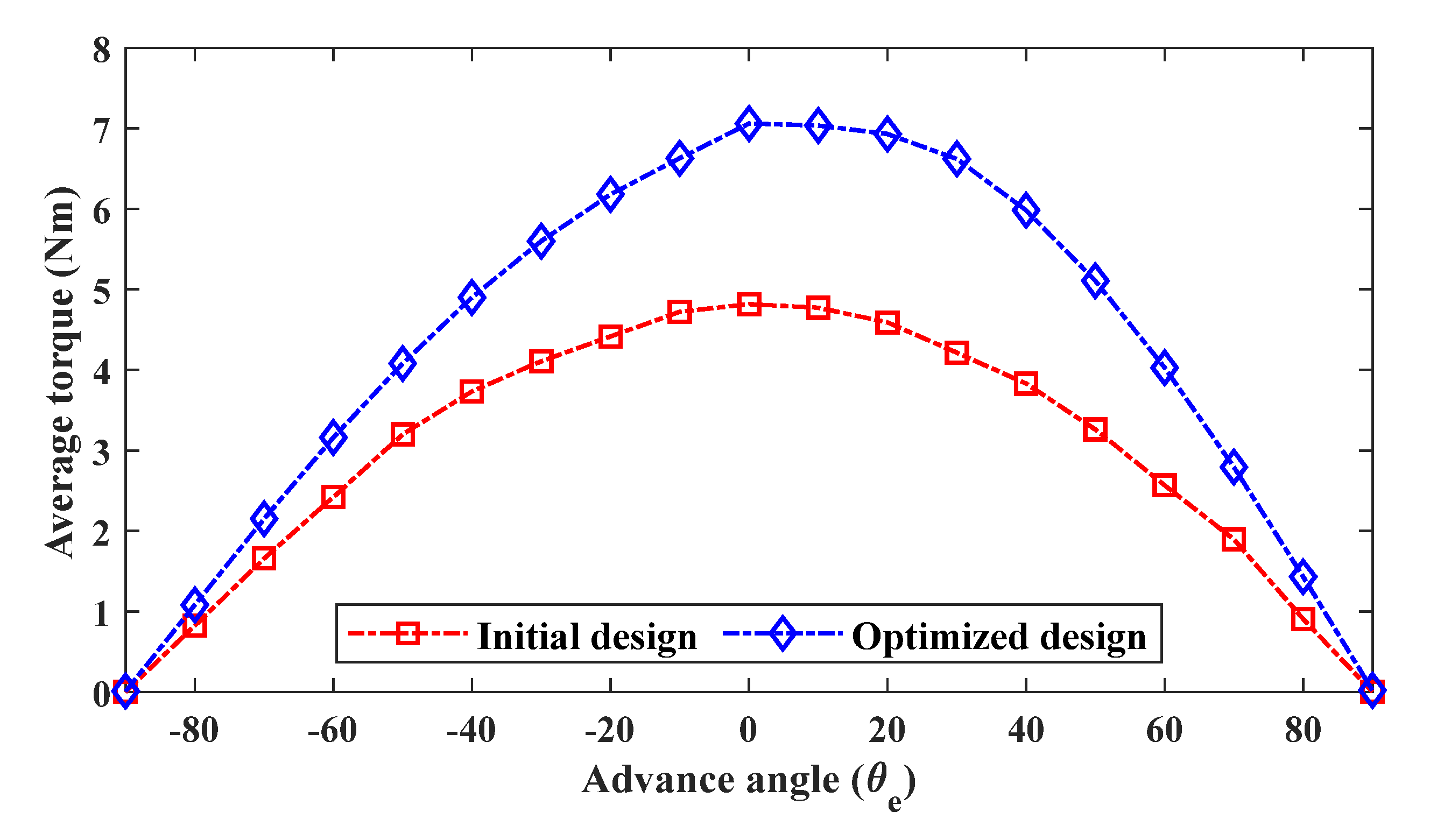
5.2. Load Analysis
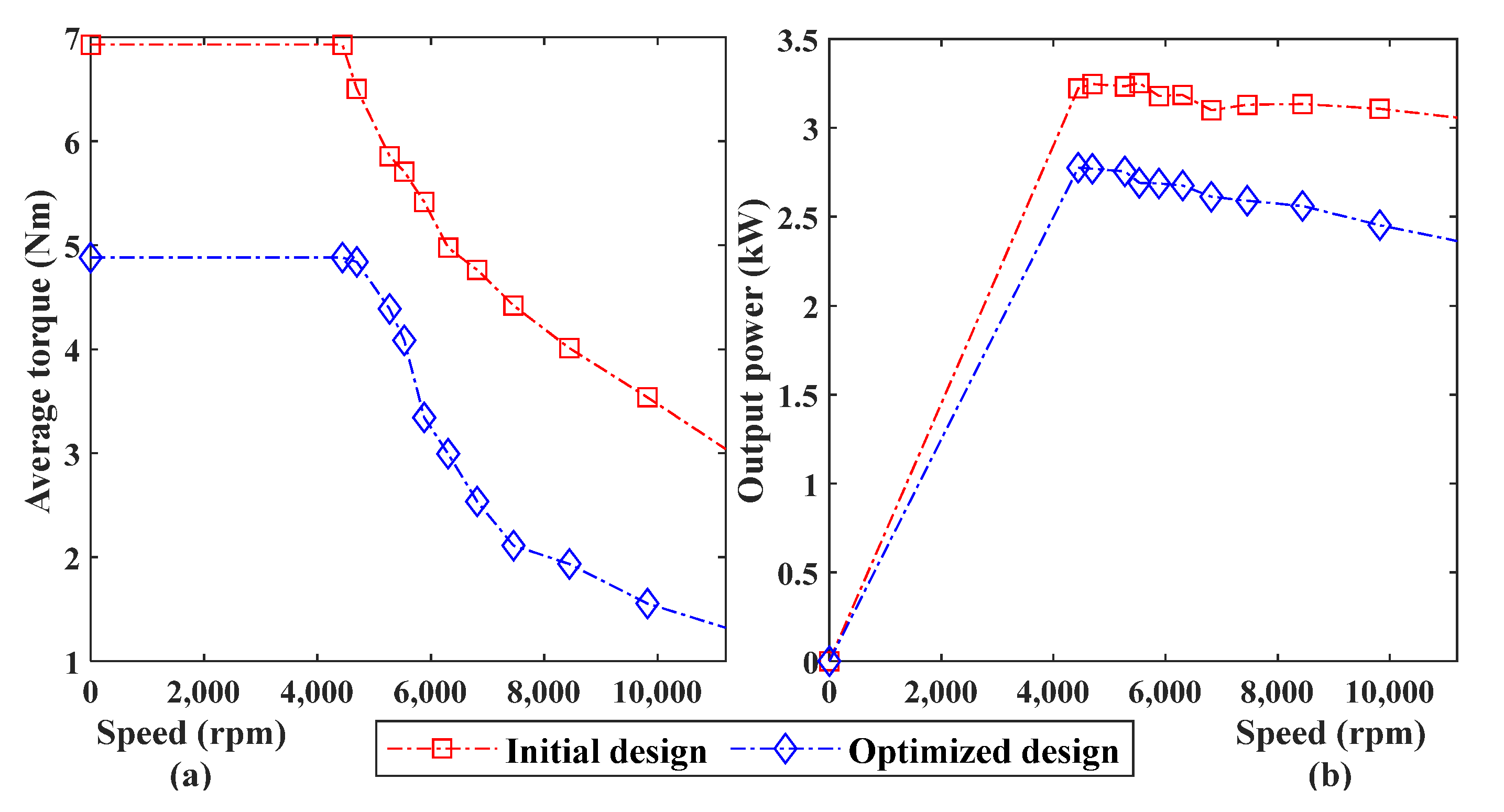
5.3. Dynamic Analysis
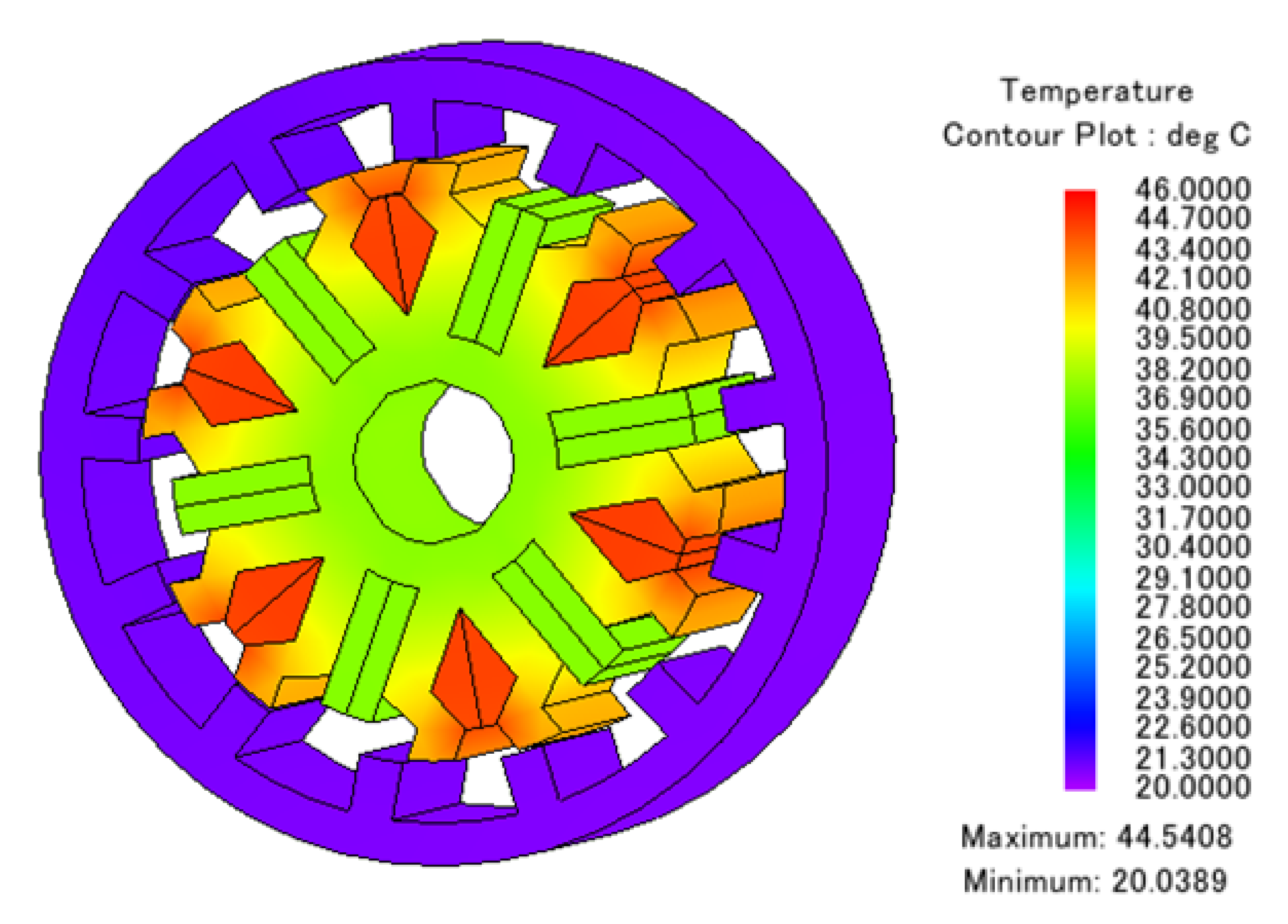
6. Thermal Analysis
7. Comparison of Proposed and Conventional Design
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ullah, W.; Khan, F.; Sulaiman, E.; Umair, M.; Ullah, N.; Khan, B. Analytical validation of novel consequent pole E-core stator permanent magnet flux switching machine. IET Electr. Power Appl. 2020, 14, 789–796. [Google Scholar] [CrossRef]
- Jiang, W.; Huang, W.; Lin, X.; Zhao, Y.; Zhu, S. Analysis of Rotor Poles and Armature Winding Configurations Combinations of Wound Field Flux Switching Machines. IEEE Trans. Ind. Electron. 2021, 68, 7838–7849. [Google Scholar] [CrossRef]
- Jiang, W.; Huang, W.; Lin, X.; Zhao, Y.; Wu, X.; Zhao, Y.; Dong, D.; Jiang, X. A Novel Stator Wound Field Flux Switching Machine with the Combination of Overlapping Armature Winding and Asymmetric Stator Poles. IEEE Trans. Ind. Electron. 2022, 69, 2737–2748. [Google Scholar] [CrossRef]
- Zulu, A.; Mecrow, B.; Armstrong, M. A Wound-Field Three-Phase Flux-Switching Synchronous Motor with All Excitation Sources on the Stator. IEEE Trans. Ind. Appl. 2010, 46, 2363–2371. [Google Scholar] [CrossRef]
- Tang, Y.; Paulides, J.; Motoasca, T.; Lomonova, E. Flux-Switching Machine with DC Excitation. IEEE Trans. Magn. 2012, 48, 3583–3586. [Google Scholar] [CrossRef]
- Wu, Z.; Zhu, Z.; Wang, C. Reduction of On-Load DC Winding-Induced Voltage in Partitioned Stator Wound Field Switched Flux Machines by Dual Three-Phase Armature Winding. IEEE Trans. Ind. Electron. 2022, 69, 5409–5420. [Google Scholar] [CrossRef]
- Ullah, W.; Khan, F.; Hussain, S. A Comparative Study of Dual Stator with Novel Dual Rotor Permanent Magnet Flux Switching Generator for Counter Rotating Wind Turbine Applications. IEEE Access 2022, 10, 8243–8261. [Google Scholar] [CrossRef]
- Tang, Y.; Motoasca, E.; Paulides, J.; Lomonova, E. Comparison of flux-switching machines and permanent magnet synchronous machines in an in-wheel traction application. COMPEL-Int. J. Comput. Math. Electr. Electron. Eng. 2012, 32, 153–165. [Google Scholar] [CrossRef]
- Othman, S.; Ahmad, M.; Rahim, J.; Bahrim, F.; Sulaiman, E. Design Improvement of Three Phase 12Slot-14Pole Outer Rotor Field Excitation Flux Switching Motor. Int. J. Power Electron. Drive Syst. (IJPEDS) 2017, 8, 239. [Google Scholar] [CrossRef]
- Shen, Y.; Hu, P.; Jin, S.; Wei, Y.; Lan, R.; Zhuang, S.; Zhu, H.; Cheng, S.; Chen, J.; Wang, D.; et al. Design of Novel Shaftless Pump-Jet Propulsor for Multi-Purpose Long-Range and High-Speed Autonomous Underwater Vehicle. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar] [CrossRef]
- Su, P.; Hua, W.; Wu, Z.; Chen, Z.; Zhang, G.; Cheng, M. Comprehensive Comparison of Rotor Permanent Magnet and Stator Permanent Magnet Flux-Switching Machines. IEEE Trans. Ind. Electron. 2019, 66, 5862–5871. [Google Scholar] [CrossRef]
- Hua, W.; Cheng, M.; Zhu, Z.; Howe, D. Analysis and Optimization of Back EMF Waveform of a Flux-Switching Permanent Magnet Motor. IEEE Trans. Energy Convers. 2008, 23, 727–733. [Google Scholar] [CrossRef]
- Du, Y.; Zhang, C.; Zhu, X.; Xiao, F.; Sun, Y.; Zuo, Y.; Quan, L. Principle and analysis of doubly salient PM motor with Π-shaped stator iron core segments. IEEE Trans. Ind. Electron. 2018, 66, 1962–1972. [Google Scholar] [CrossRef]
- Ullah, W.; Khan, F.; Hussain, S. A Novel Dual Rotor Permanent Magnet Flux Switching Generator for Counter Rotating Wind Turbine Applications. IEEE Access 2022, 10, 16456–16467. [Google Scholar] [CrossRef]
- Chau, K.; Chan, C.C.; Liu, C. Overview of permanent-magnet brushless drives for electric and hybrid electric vehicles. IEEE Trans. Ind. Electron. 2008, 55, 2246–2257. [Google Scholar] [CrossRef]
- Du, Z.S.; Lipo, T.A. Efficient utilization of rare earth permanent-magnet materials and torque ripple reduction in interior permanent-magnet machines. IEEE Trans. Ind. Appl. 2017, 53, 3485–3495. [Google Scholar] [CrossRef]
- Dorrell, D.; Parsa, L.; Boldea, I. Automotive Electric Motors, Generators, and Actuator Drive Systems with Reduced or No Permanent Magnets and Innovative Design Concepts. IEEE Trans. Ind. Electron. 2014, 61, 5693–5695. [Google Scholar] [CrossRef]
- Boldea, I.; Tutelea, L.N.; Parsa, L.; Dorrell, D. Automotive Electric Propulsion Systems with Reduced or No Permanent Magnets: An Overview. IEEE Trans. Ind. Electron. 2014, 61, 5696–5711. [Google Scholar] [CrossRef]
- Yang, G.; Lin, M.; Li, N.; Tan, G.; Zhang, B. Flux-Weakening Control Combined with Magnetization State Manipulation of Hybrid Permanent Magnet Axial Field Flux-Switching Memory Machine. IEEE Trans. Energy Convers. 2018, 33, 2210–2219. [Google Scholar] [CrossRef]
- Wardach, M.; Palka, R.; Paplicki, P.; Prajzendanc, P.; Zarebski, T. Modern Hybrid Excited Electric Machines. Energies 2020, 13, 5910. [Google Scholar] [CrossRef]
- Zhang, G.; Hua, W.; Cheng, M.; Liao, J.; Wang, K.; Zhang, J. Investigation of an improved hybrid-excitation flux-switching brushless machine for HEV/EV applications. IEEE Trans. Ind. Appl. 2015, 51, 3791–3799. [Google Scholar] [CrossRef]
- Pollock, C.; Pollock, H.; Barron, R.; Coles, J.R.; Moule, D.; Court, A.; Sutton, R. Flux-switching motors for automotive applications. IEEE Trans. Ind. Appl. 2006, 42, 1177–1184. [Google Scholar] [CrossRef]
- Zhao, G.; Hua, W.; Qi, J. Comparative Study of Wound-Field Flux-Switching Machines and Switched Reluctance Machines. IEEE Trans. Ind. Appl. 2019, 55, 2581–2591. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Wu, Z.Z.; Evans, D.J.; Chu, W.Q. A Wound Field Switched Flux Machine with Field and Armature Windings Separately Wound in Double Stators. IEEE Trans. Energy Convers. 2015, 30, 772–783. [Google Scholar] [CrossRef]
- Yang, S.; Zhang, J.; Jiang, J. Modeling Torque Characteristics and Maximum Torque Control of a Three-Phase, DC-Excited Flux-Switching Machine. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar] [CrossRef]
- Nguyen, H.Q.; Jiang, J.Y.; Yang, S.M. Design of a wound-field flux switching machine with dual-stator to reduce unbalanced shaft magnetic force. J. Chin. Inst. Eng. 2017, 40, 441–448. [Google Scholar] [CrossRef]
- Parappagoudar, M.B.; Pratihar, D.K.; Datta, G.L. Forward and reverse mappings in green sand mould system using neural networks. Appl. Soft Comput. 2008, 8, 239–260. [Google Scholar] [CrossRef]
- Zhao, J.; Guan, X.; Li, C.; Mou, Q.; Chen, Z. Comprehensive evaluation of inter-turn short circuit faults in pmsm used for electric vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 22, 611–621. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value (unit) | Symbol | Value (unit) |
|---|---|---|---|
| R1 | 15 mm | 7.5 mm | |
| R2 | 20 mm | 6 mm | |
| R3 | 35.5 mm | 7.5 mm | |
| R4 | 40 mm | 22 mm | |
| R5 | 44.5 mm | 10 mm | |
| R6 | 45 mm | 6 mm | |
| R7 | 52.5 mm | 15.5 mm | |
| R8 | 60 mm | 9 mm | |
| βin | 6.76 mm | 11.67 mm | |
| W1 | 6 mm | W2 | 6 mm |
| W3 | 6 mm | Stack length | 45 mm |
| 12S/7P | 12S/11P | 12S/13P | 12S/17P | |
|---|---|---|---|---|
| Average Torque (Nm) | 2.72 | 1.68 | 4.62 | 3.72 |
| Cogging Torque P-P (Nm) | 0.344 | 0.377 | 0.246 | 0.0508 |
| Torque ripples (%) | 32 | 16 | 31 | 12 |
| Flux Linkage (Wb) | 0.022816 | 0.010481 | 0.021185 | 0.014152 |
| Back-EMF (V) | 25.06 | 18.13 | 44.84 | 38.64 |
| Parameters | Initial (mm) | Boundary Conditions | Optimized (mm) |
|---|---|---|---|
| 7.5 | 6.3505 | ||
| 3 | 3.3055 | ||
| W1 | 6 | 7.97017 | |
| W2 | 6 | 5.9480 | |
| W3 | 6 | 6.8116 |
| Parameters | Initial Value | Optimized Value | Improvement |
|---|---|---|---|
| Torque Ripples (%) | |||
| 0.1424 | 54.93% | ||
| Odd harmonics in flux (Wb) | |||
| THD in flux (%) | |||
| Odd harmonics in back-EMF (V) | |||
| THD in back emf (%) | |||
| 2.27 | 3.223 | 29.56% | |
| 0.84 | 0.97 | 13.4% | |
| 83.4 | 87.70 | 4.9% |
| Parameters | Straight WFSM | Skewed WFSM | 12/8 SRM | 12/10 SRM | Proposed Machine |
|---|---|---|---|---|---|
| ) | 35.1 | 30.52 | 32.32 | 28.4 | 47.95 |
| 27.6 | 6.85 | 73.1 | 68.9 | 25 | |
| 89.4 | 88 | 89.9 | 90.5 | 89.3 | |
| 19.87 | 19.54 | 19.74 | 16.19 | ||
| 17.86 | 13.74 | 12.63 | 3.121 | ||
| 37.73 | 34.33 | 32.37 | 19.311 | ||
| ) | 0.930 | 0.808 | 0.941 | 0.877 | 2.483 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Akbar, S.; Khan, F.; Ullah, W.; Ullah, B.; Milyani, A.H.; Azhari, A.A. Performance Analysis and Optimization of a Novel Outer Rotor Field-Excited Flux-Switching Machine with Combined Semi-Closed and Open Slots Stator. Energies 2022, 15, 7531. https://doi.org/10.3390/en15207531
Akbar S, Khan F, Ullah W, Ullah B, Milyani AH, Azhari AA. Performance Analysis and Optimization of a Novel Outer Rotor Field-Excited Flux-Switching Machine with Combined Semi-Closed and Open Slots Stator. Energies. 2022; 15(20):7531. https://doi.org/10.3390/en15207531
Chicago/Turabian StyleAkbar, Siddique, Faisal Khan, Wasiq Ullah, Basharat Ullah, Ahmad H. Milyani, and Abdullah Ahmed Azhari. 2022. "Performance Analysis and Optimization of a Novel Outer Rotor Field-Excited Flux-Switching Machine with Combined Semi-Closed and Open Slots Stator" Energies 15, no. 20: 7531. https://doi.org/10.3390/en15207531
APA StyleAkbar, S., Khan, F., Ullah, W., Ullah, B., Milyani, A. H., & Azhari, A. A. (2022). Performance Analysis and Optimization of a Novel Outer Rotor Field-Excited Flux-Switching Machine with Combined Semi-Closed and Open Slots Stator. Energies, 15(20), 7531. https://doi.org/10.3390/en15207531