1. Introduction
Increase in the industrialization of the modern world increases the pollution caused by automobiles and other transportation sources. The modern world is shifting toward more efficient and pollution-free hybrid electric vehicles because of the environmental issues and to escape an imminent threat of energy scarcity. Railways also are the main constituent of the transportation system. Major intercity transportation is carried out by trains. Rotary motors have been used previously in the literature for the rail infrastructure, but the gearing system used to convert rotary motion to linear lowers the overall efficiency of the system. The trend is now shifting toward linear motors as they can be directly used because of their direct nonadhesive thrust force without using the gearing system.
Linear induction motors (LIMs) have been used recently for the transportation system. Primarily, the LIMs need a lower value of volume than most of the traditional motors, reducing the cross-sectional area of tunnels. A single-sided LIM is analyzed and studied in [
1] with the derivation of the equivalent circuit and its analysis. Control strategies were devised for the LIMs in [
2,
3]. A modified model-predictive control was proposed for LIMs, and the results were analyzed. Effects of different secondaries were studied and investigated in [
4,
5]. Considering all these design optimizations and control algorithms, the main problems faced by LIMs are having lower efficiency and low power factor with respect to eddy currents, copper losses, and effects of edging, resulting in a high system and maintenance cost.
In contrast, linear permanent magnet (LPM) motors have been proven to have high efficiency, high power density, and high power factor. LPMs have many advantages, but they still have the drawback of using a large number of magnets. Mostly, the magnets are placed on the long stator, which not only makes it complex but also makes it costly. The linear flux switching machine (LFSM) is extensively studied nowadays because of its PM placement in the short mover and having a simple iron stator. In addition to these advantages of PM machines, LFSPM machines have several other advantages, such as easy maintenance, easy heat management system, and lower cost of the secondary, which makes it unique for purposes such as trains and railway stations [
6,
7]. However, LFSPM suffers from high detent force due to slot and end effects. Slot effect can be suppressed by adjusting the length and width of the PM [
8]. It can be used to reduce detent force, but it has a negative effect on the thrust force, reducing it considerably. In [
9,
10], staggered tooth and semi-closed slots were proposed for reducing detent force and end effect, but it has the drawback of making the winding arrangement difficult and making the whole machine complex. To reduce the end effect in linear machines, auxiliary poles (APs) were proposed in [
11,
12], but they also increase the total harmonic distortions (THDs) of the back-EMF profile. Modular structure was used in [
13,
14] to reduce the end effect caused by unstable magnetic circuits.
Thermal environment greatly affects the working conditions of a machine. Authors in [
15] used the Arrhenius model along with a coaxial multi-slot antenna. Authors in [
16] analyzed various deformations along with the wear and tear because of the temperature rise. Ref. [
17] only considered the distribution of temperature while ignoring the temperature rise with the passage of time. Refs. [
18,
19] divided the whole machine into various different parts and analyzed temperature rise in each of the parts, which increased the efficiency of the method. Authors in [
20,
21] used the same method of dividing the machine various isotropic parts and analyzing the temperature in each part and then comparing the average temperature rise in the whole of the machine.
This paper proposes a novel LHFSPM machine with crooked tooth modular stator. Two DC excitation sources are placed below and above a ferrite magnet, and overlapped concentrated winding is used for the armature. The stator of the machine is in the form of a U-shaped module with a crooked angle. The whole model is designed and analyzed in JMAG, registered version 20.1. No-load and loaded studies of the machine are carried out, and optimization techniques were used to improve the thrust force characteristics. This paper is divided into six further sections:
Section 2 discusses the structure, design, and working principle of the machine;
Section 3 covers optimization techniques and their effect on the performance of the machine;
Section 4 discusses the electromagnetic performance evaluation using a number of study techniques to reach the proposed model;
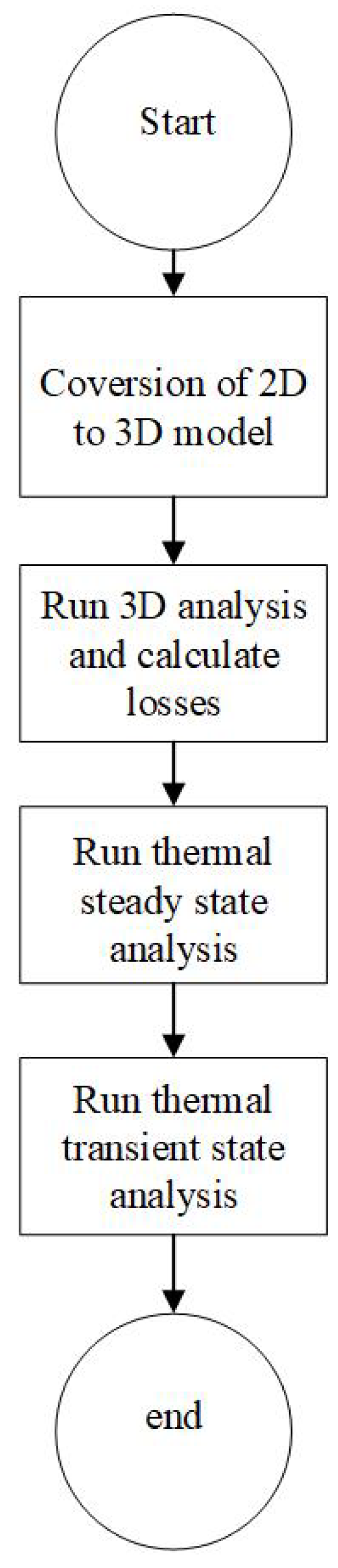
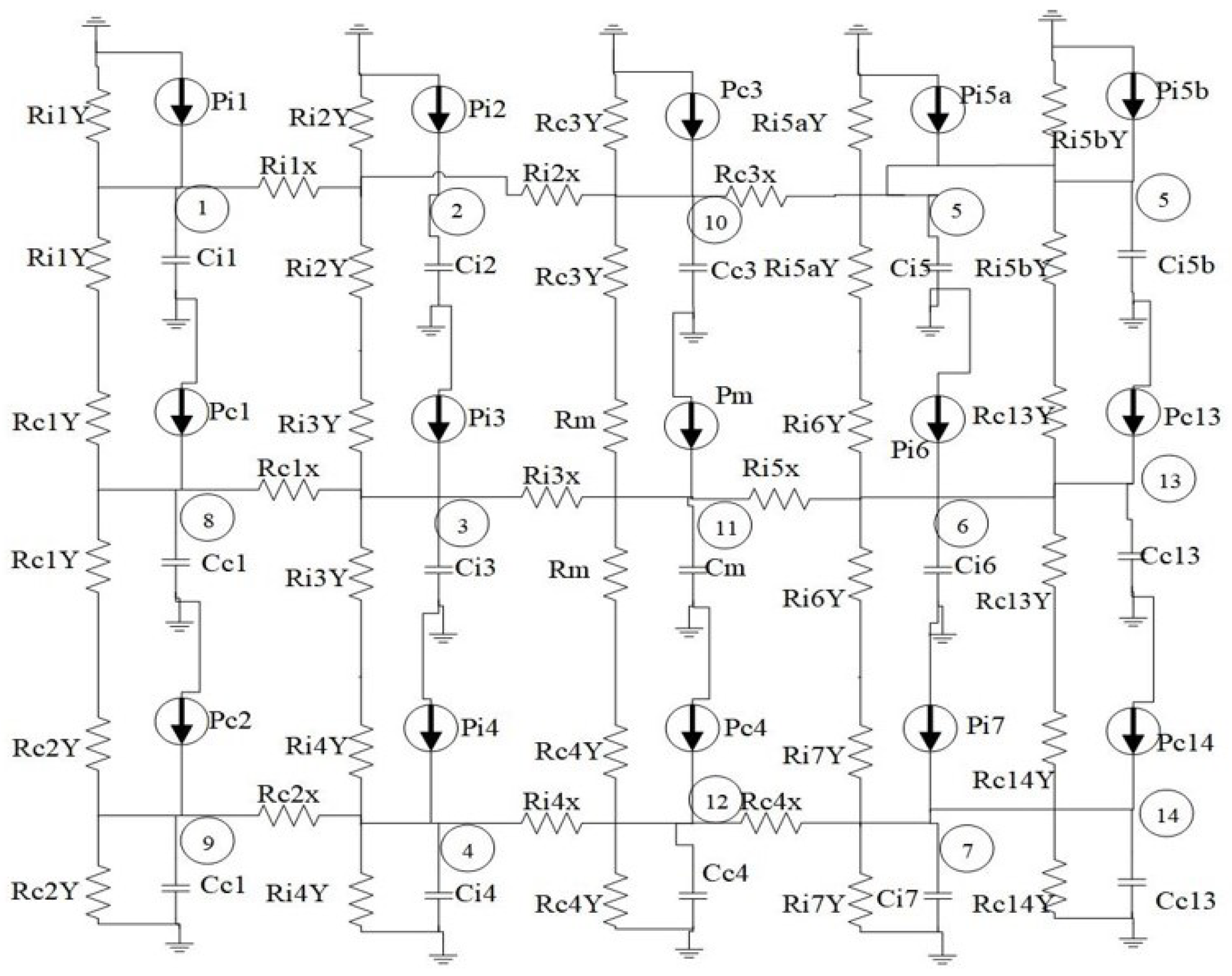
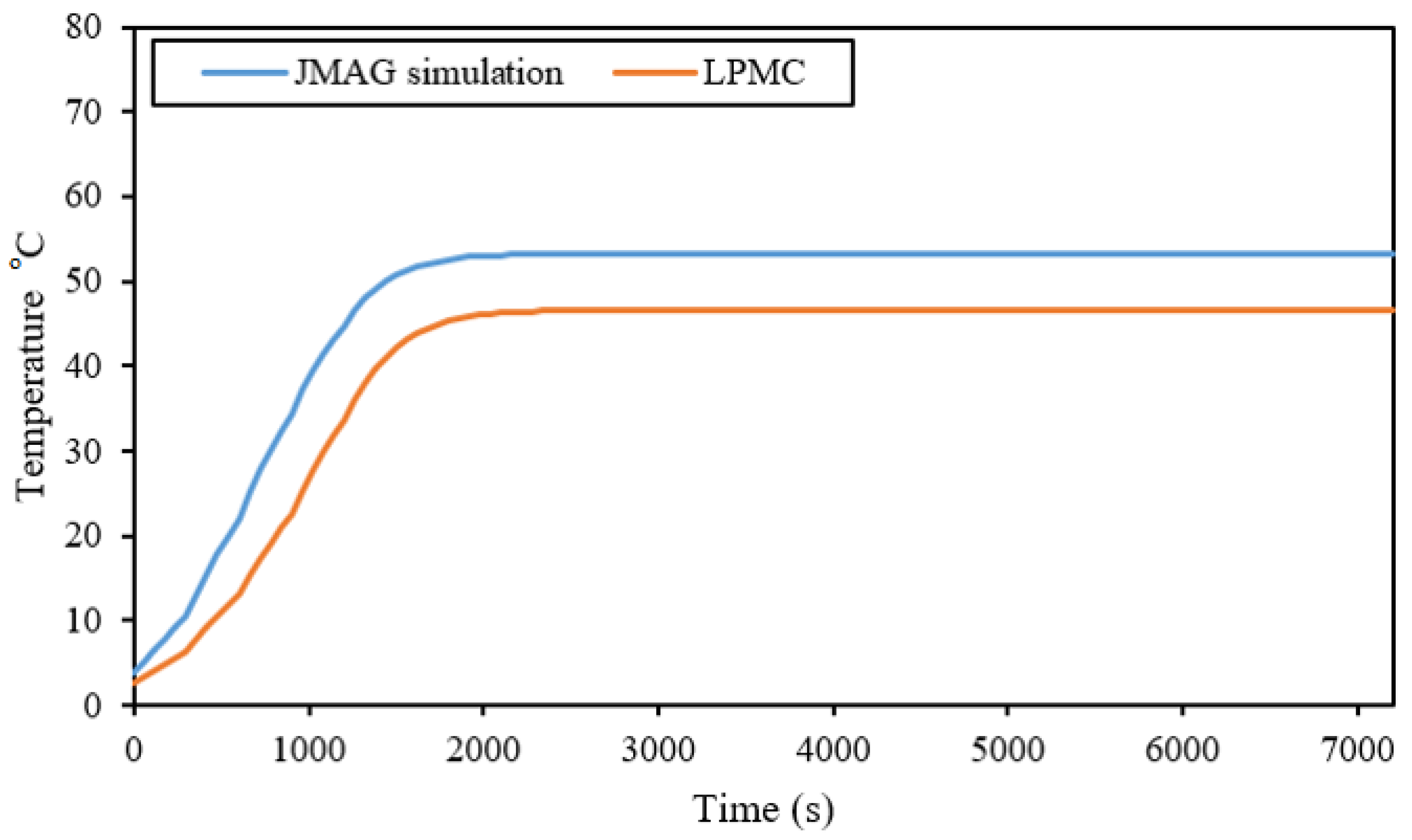
Section 5 discusses the thermal analysis of the machine and comparison between the FEA thermal analysis and LPMEC model;
Section 6 presents the comparison of proposed and conventional machine;
Section 7 provides the conclusion, which is an overview of the whole paper, and all the necessary points are discussed.
2. Design and Working Principle
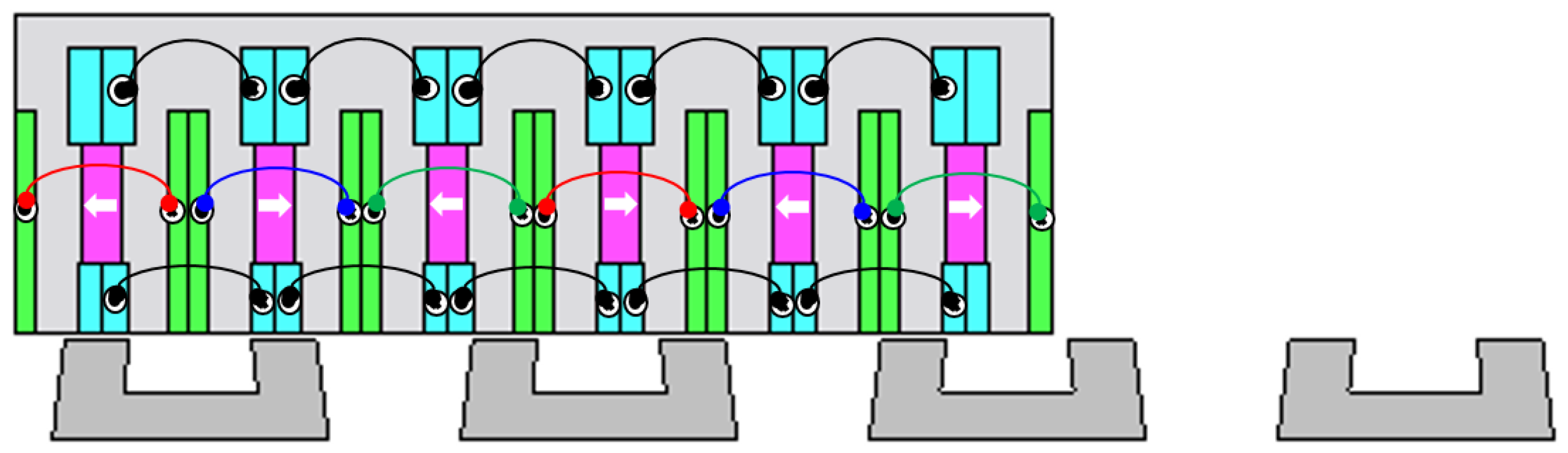
The design of the proposed model is shown in
Figure 1. DC field windings (shown by cyan color) and armature windings (shown by green color) are placed on the short mover. Permanent magnets (PMs) (shown by magenta color) are placed inset in the mover poles magnetized in a parallel direction. The stator of the model is in the form of U-shaped modules, which are placed at a certain distance from each other, having no direct electrical or magnetic contact. Such an arrangement uses less iron than the conventional stator and not only decreases the cost of the machine but also improves the overall efficiency of the machine. A conventional stator is made up of a full-length iron core which becomes impractical for countries such as Pakistan and other developing countries.
To minimize the detent force of the machine, a suitable selection of mover slot
and stator pole
is made using Equation (
1) [
13].
where
q denotes the number of phases and
n represents any natural number. For various values of
n, different stator pole numbers are studied and analyzed. It was noted that the machine has a sinusoidal flux linkage and unidirectional thrust force when
. The average thrust force for
is higher than
, so it is considered for further analysis. The velocity of the machine is dependent on the input source frequency and pole pitch of the machine and can be found by using Equation (
2) [
22].
where
v is the velocity,
f is the frequency of the source, and
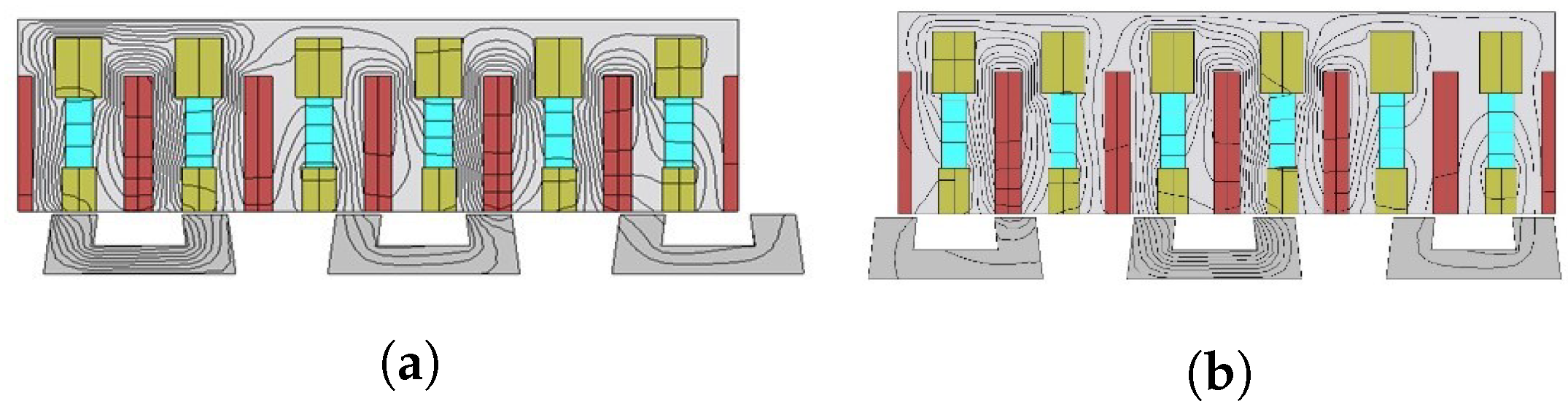
is the pole pitch of the machine. Flux linkage of the machine greatly varies (periodically) with the position of the mover relative to the stator position since the flux path changes as the mover changes its position. Considering phase A at two different points, both maximum and minimum flux linkage are analyzed, as shown in
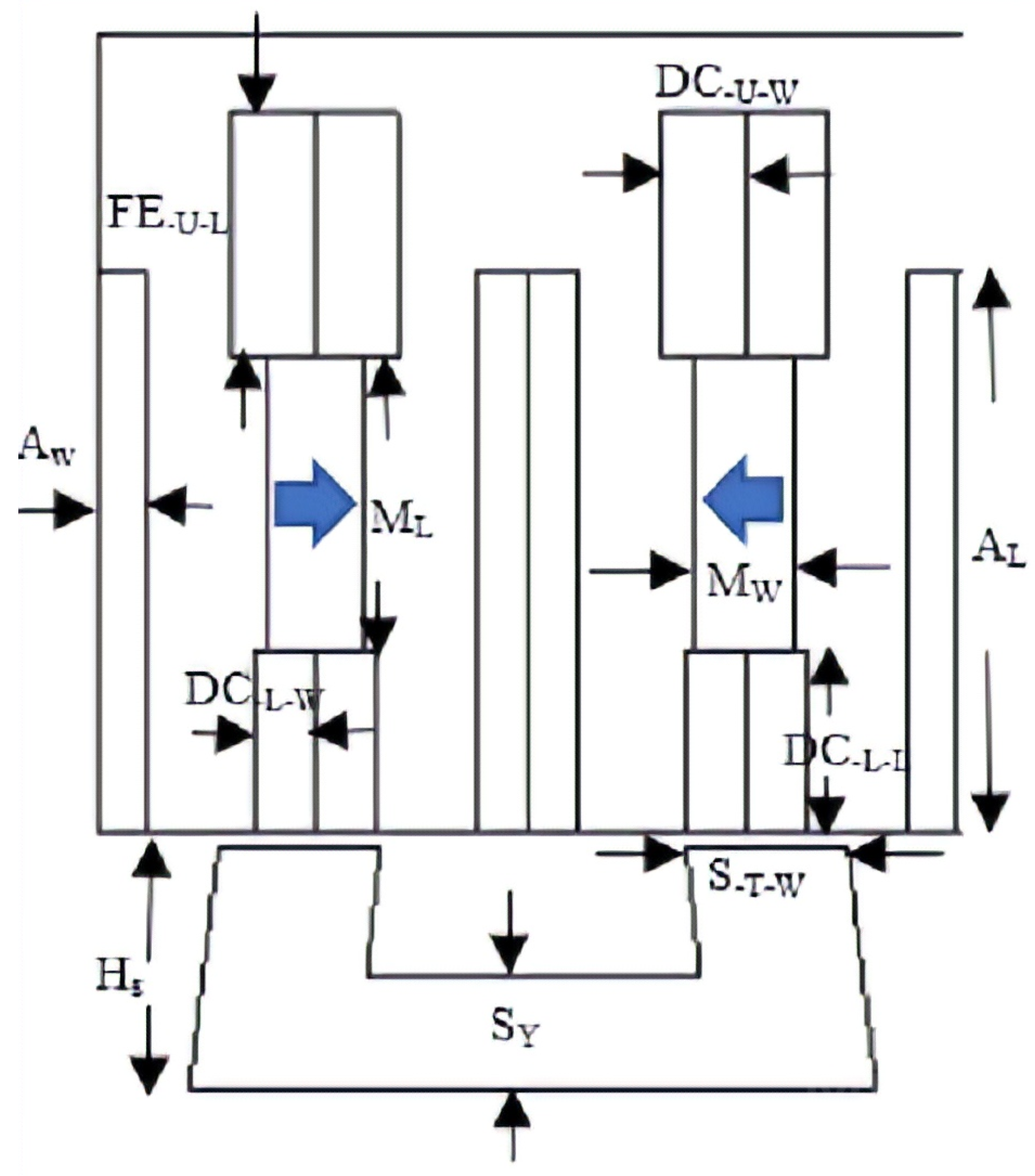
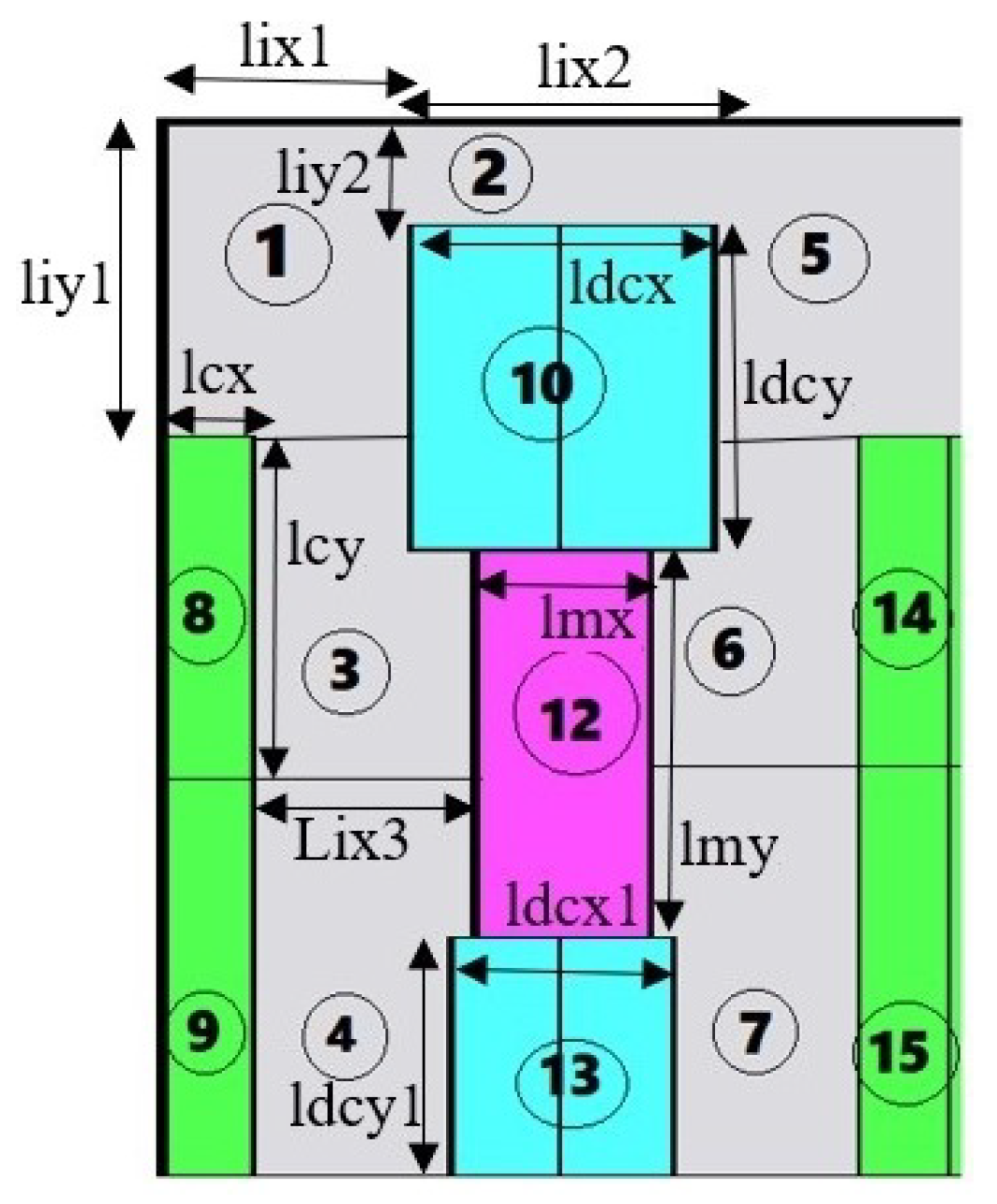
Figure 2a,b, respectively. At point 1, flux linkage due to phase A is at a positive maximum as the mover pole and stator tooth is completely aligned. Flux flows through the magnet, mover pole, air gap, and then into the stator tooth, completing the flux path back into the mover. A point 2, the flux linkage of phase A is at a negative maximum as the mover pole stator tooth is completely misaligned, while phase B and phase C have some value. The three phases are completely (120 degrees) apart. The direction of PM magnetization is set horizontal to that of the primary moving direction. The direction of PM and armature winding and DC is either clockwise or anticlockwise, to strengthen the overall machine’s flux linkage. Parameters of the machine are defined in
Figure 3. The details of the parameters and their numerical values are tabularized in
Table 1.
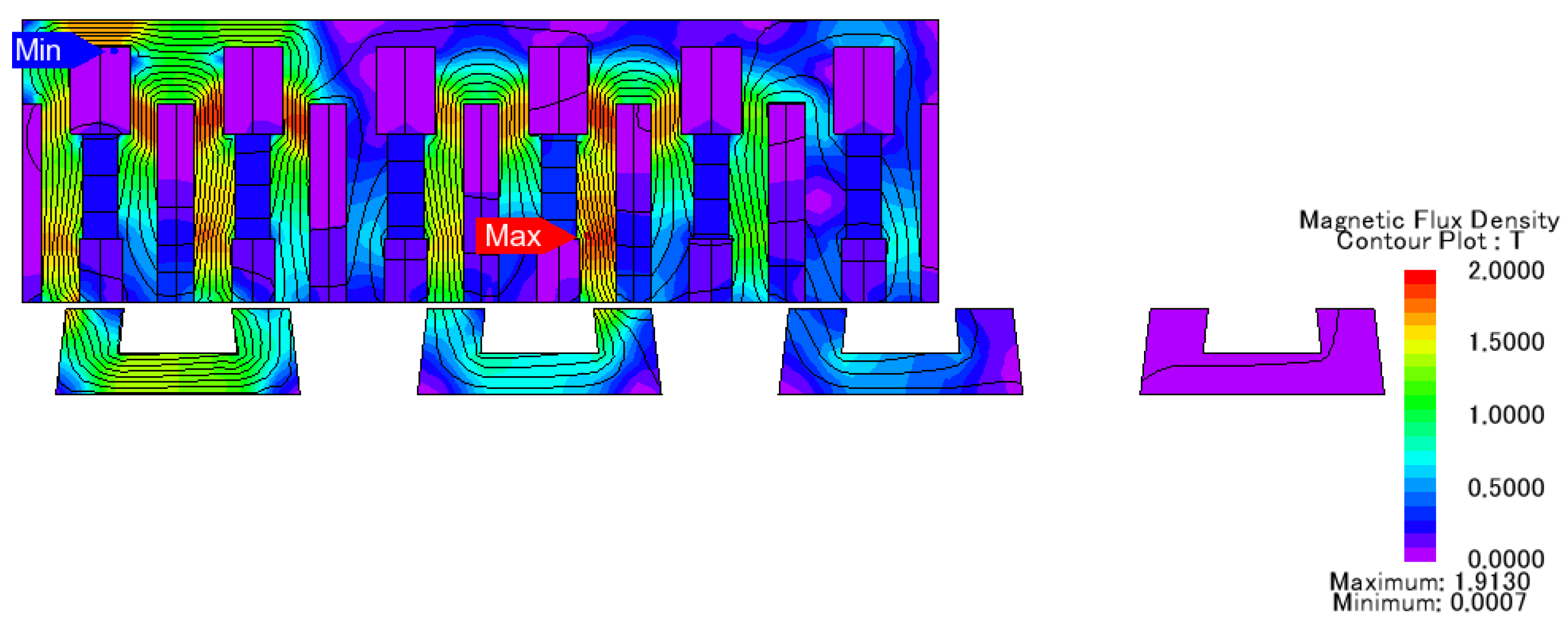
A flux density nephogram of the machine is shown in
Figure 4, which reflects the magnetic flux density at various points of the machine, the path followed by the flux, and how flux switches from one mover pole to another pole through the modular stator. Slight saturation can be seen in the red regions in the nephogram, but it cannot be considered to cause a heating effect in the machine. The maximum flux density in the mover is 1.8 T, while in the case of the stator, maximum flux density is 1.42 T.
Coil configuration is dependent on the number of mover slots. Once the mover slot combination is confirmed, the coil configuration can be adjusted accordingly. Coil span is the axial distance through which a coil is wound. The coil span of the machine depends on the type of winding configuration used, either concentrated or simple.
where
represents number of mover slot,
represents number of stator tooth, and
function is used to return integer value only. In case of a three-phase balanced system, the phases are separated 120 degrees apart. The phase separation for a machine can be found by
.
k is any integer value, e.g., . If a suitable value for k is not found, then that value of slot and pole combination shall not be chosen.
3. Optimization and Refinement of Machine Parameters
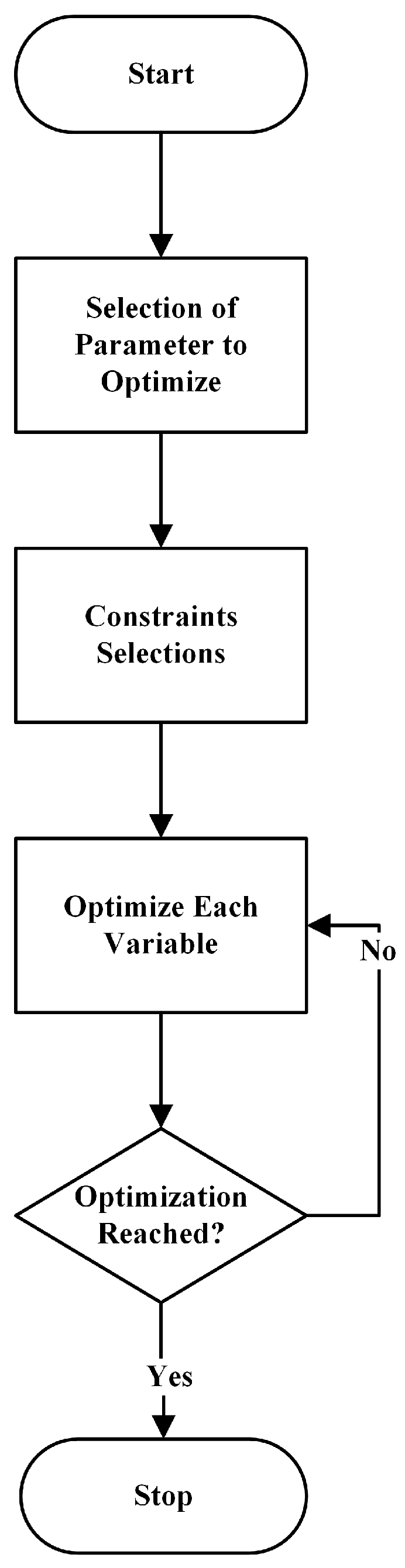
To increase the thrust force and efficiency of the machine, different machine parameters were optimized using single variable geometric optimization and JMAG inbuilt optimization (genetic algorithm (GA)). Thrust force amplification is considered the main target. In geometric optimization, a series of consecutive values are considered for geometry, and then the resulting thrust force is analyzed.
3.1. Geometric Optimization
Leading parameters such as split ratio (
S.R) and armature slot width (
) were optimized using geometric optimization.
Figure 5 shows the flowchart of single variable geometric optimization.
Determination of optimal split ratio is a very important process of designing a machine as it decides not only the average thrust force but also the overall cost of the machine. If the selected value of the split ratio is low, it will reduce the stator height, which is suitable for railway transits. On the other hand, it will increase mover height and mass, resulting in the reduction of the average thrust force. The higher value of the split ratio resolves the mover mass problem but increases the stator volume, making the machine costly. The split ratio of the machine can be found by Equation (
5) [
23].
Table 2 shows the performance of the machine at different values of
.
The suitable height and width of the slot area are selected by keeping the overall slot area constant and changing the width and height of the machine. Increasing the width tends to decrease the height of the slot, and decreasing the width increases the height of the slot. The height and width of the machine are interrelated by Equation (
6).
Table 3 shows the thrust force profile at different slot width and height values.
3.2. Genetic Optimization
Stator tooth width, stator module spacing, crooked angle of the tooth, and starting angle of the machine are the four parameters that are optimized using genetic optimization. The width of the tooth helps with better flux linkage and better alignment of the mover pole and stator tooth. Teeth provide the necessary path for the flux linkage, and if teeth are too thin, the machine will suffer from saturation, and if the teeth are too thick, the flux will not switch into the next mover pole. GA was used to select a better-suited stator width, resulting in a higher thrust force and higher flux linkage.
The stator of the proposed machine is modular, and the modules are spaced at a certain distance, so better placement of the module becomes very important. It not only increases the coil flux linkage but is also used to minimize the usage of iron and the cost of the machine. GA single variable optimization is used to select the optimal spacing distance between the modules. Complete details of initial values, final values, and the constraint for GA are given in
Table 4.
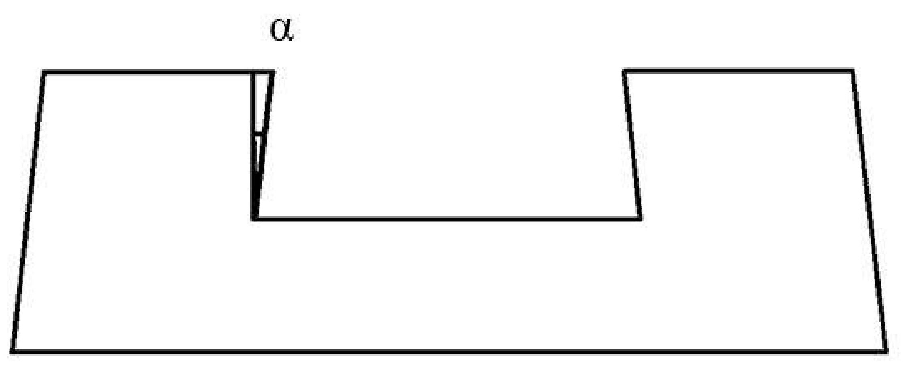
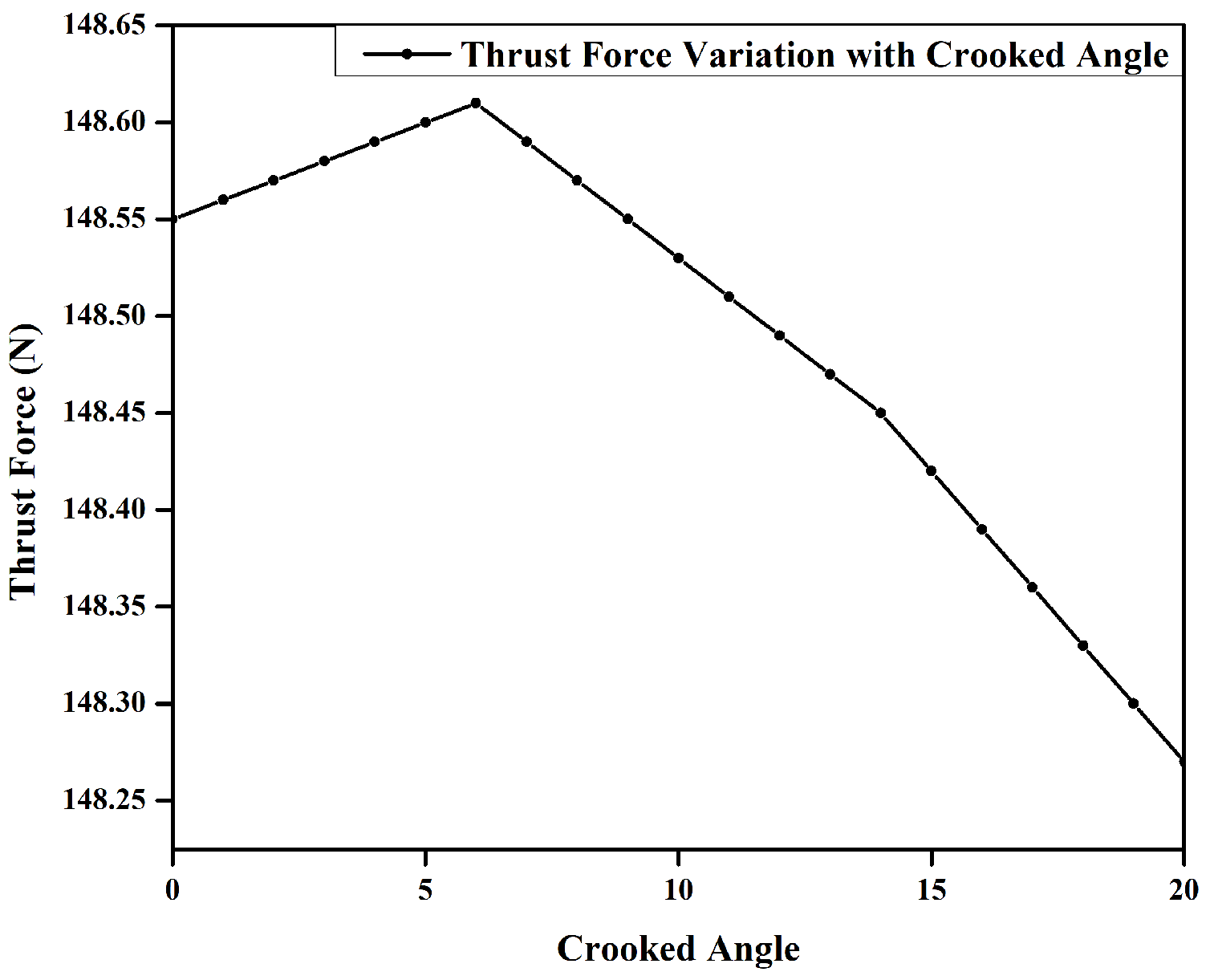
The crooked angle of the stator tooth is analyzed, and its effect on the machine’s performance is evaluated. It is the angle made by the inner side of the tooth with the yoke of the stator. Genetic optimization is employed, and it was witnessed that initially when the angle
is increased from
to
, the performance of the machine increases considerably; the best performance being noted at
. For an angle between
to
, a minute decrease is experienced in the thrust force.
Figure 6 shows the crooked angle of the stator tooth, while
Figure 7 shows the trend of how thrust force varies with the angle variation.
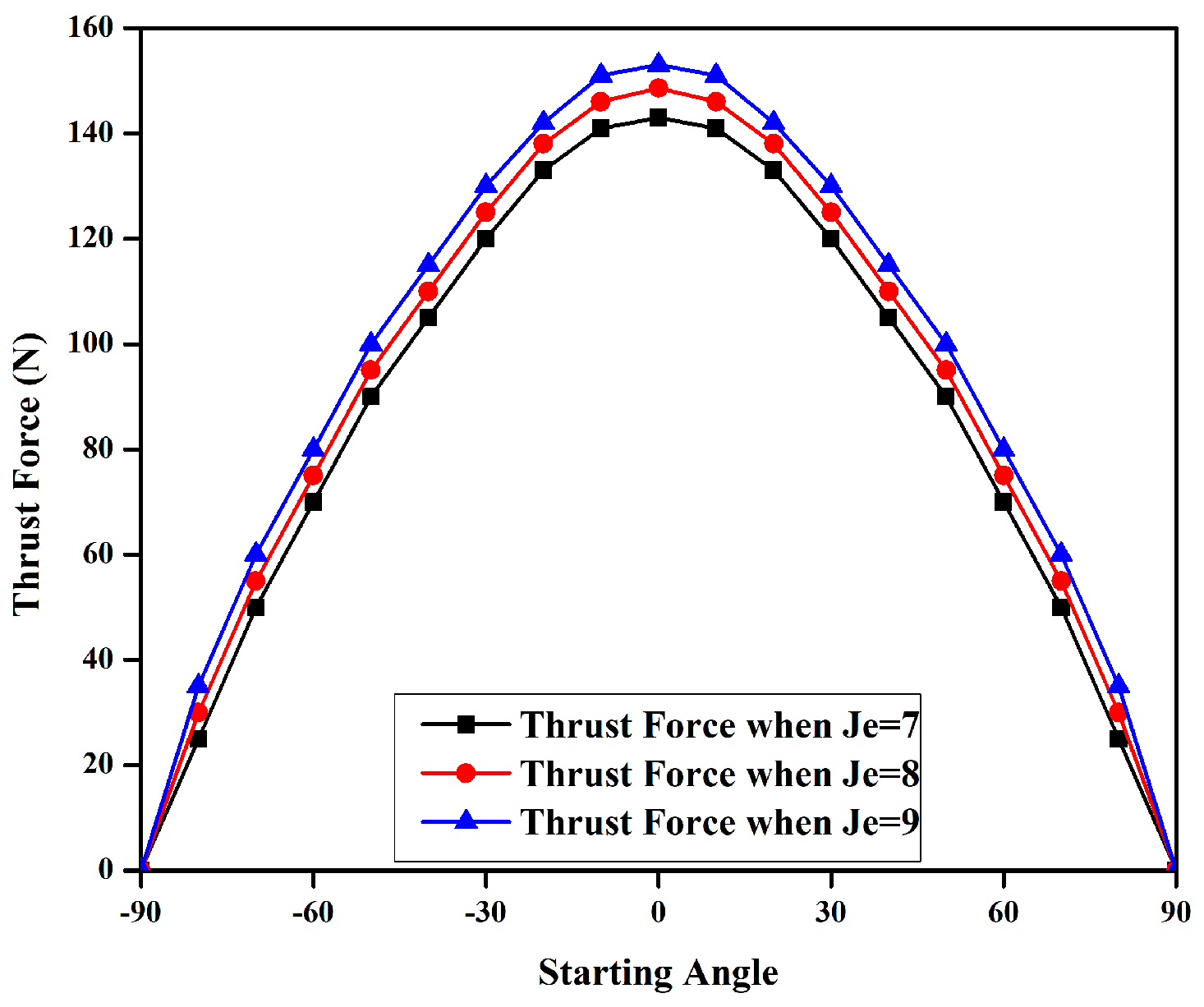
Figure 8 shows the average thrust force at different armature current starting angles. Three different
are considered, and the resultant thrust force is analyzed. It can be seen that the machine performs best at a
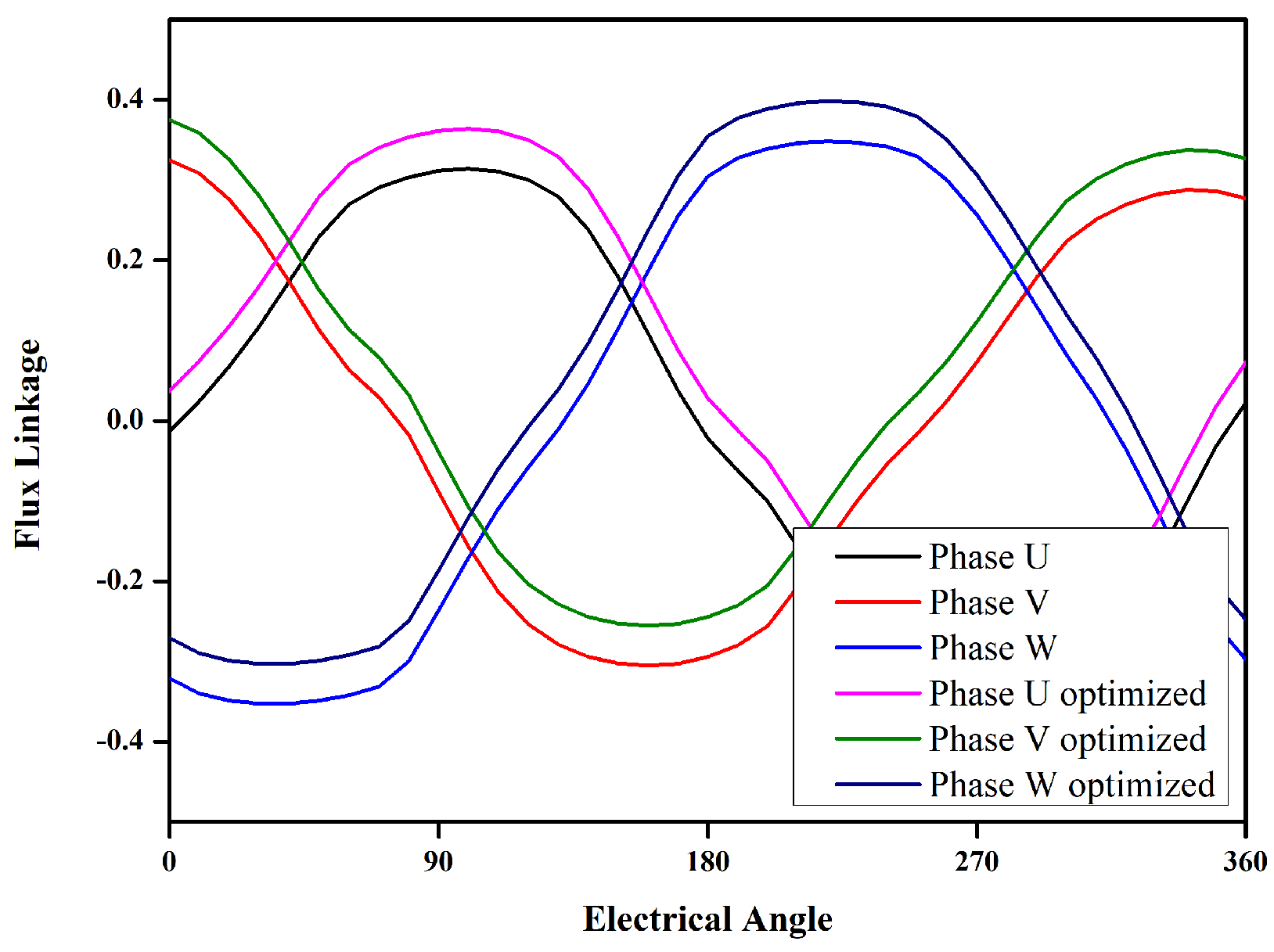
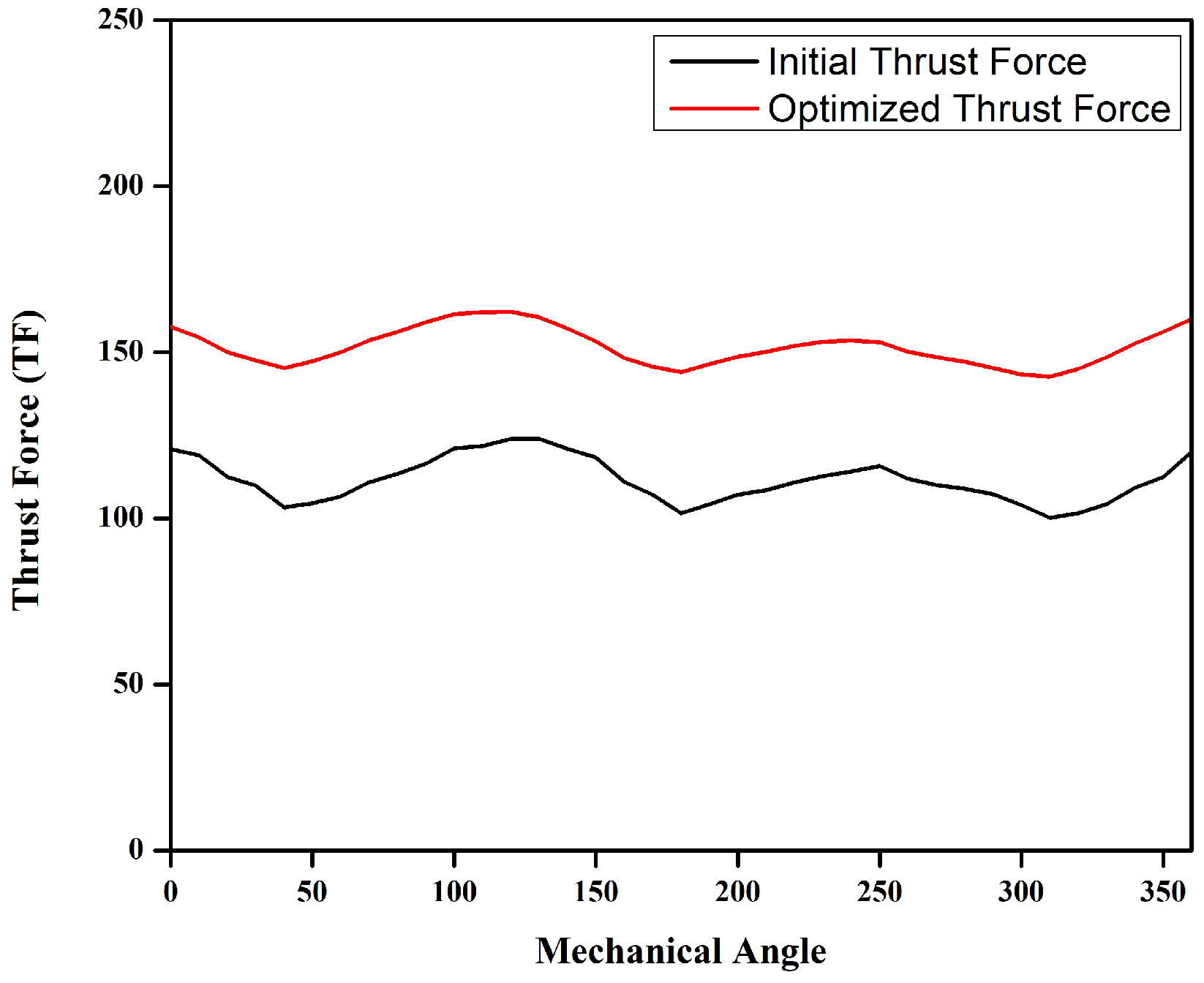
angle and the thrust force keeps on decreasing, going away from the origin in either direction. GA is used to optimize the starting angle, and its effect on the average thrust force is analyzed. The comparison of before and after optimization flux linkage and thrust force is shown in
Figure 9 and
Figure 10, respectively.
Table 5 shows before and after optimization values of parameters such as detent force, thrust force, and THD.
4. Analysis of Electromagnetic Performance
Parameters such as no-load flux linkage, detent force, total harmonic distortion (THD) of U phase, and thrust force are investigated for a boundary period of 1. No-load flux linkage
, detent force (
), and thrust force are directly calculated from the FEA. Mathematical calculations were performed to find
for on-load and THDs of no-load flux linkage. Fourier transform of no-load flux linkage is taken, after which Equation (
7) is used to find THDs.
where
represents fundamental component, and
to
are the harmonics. Thrust force density with respect to mover volume of on-load study is calculated by Equation (
8).
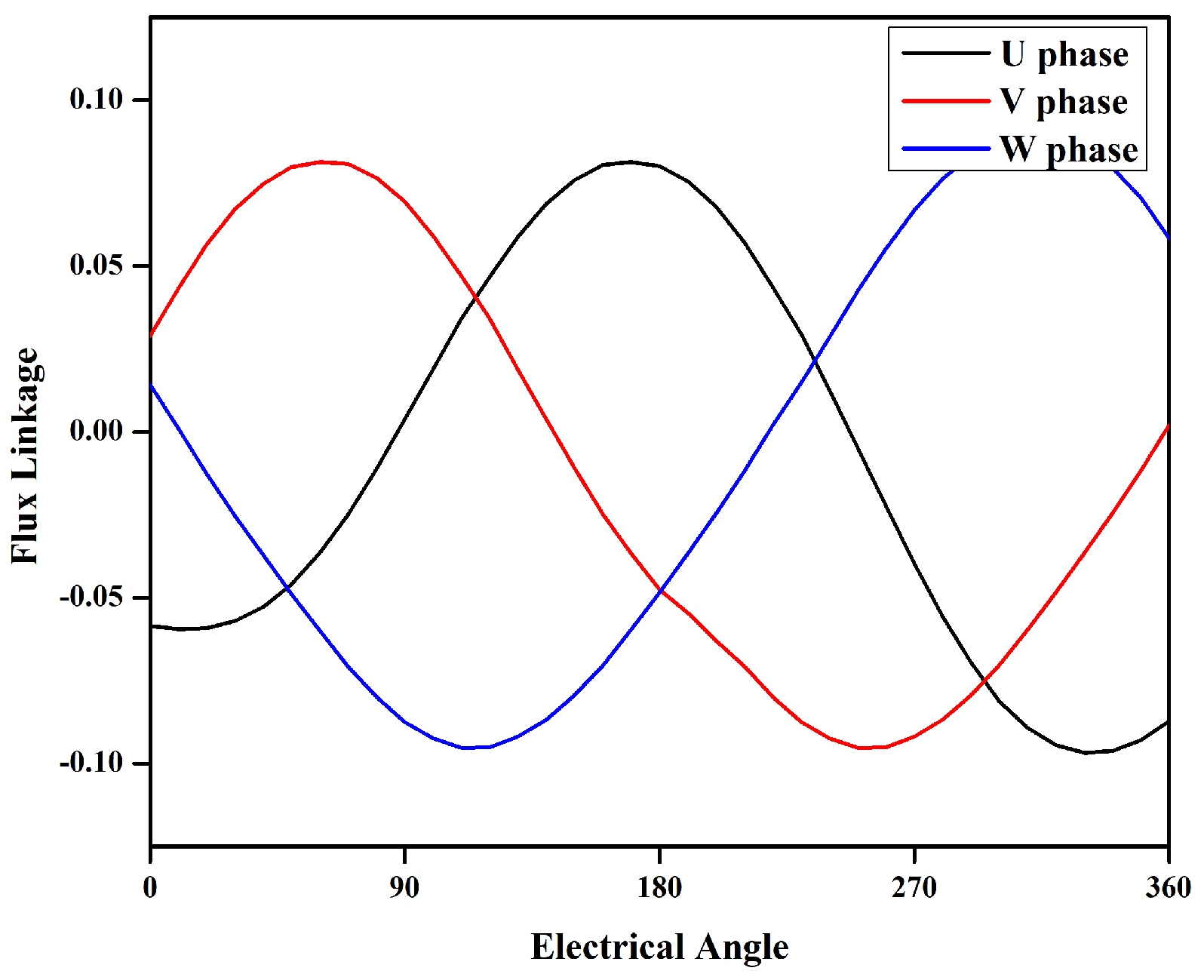
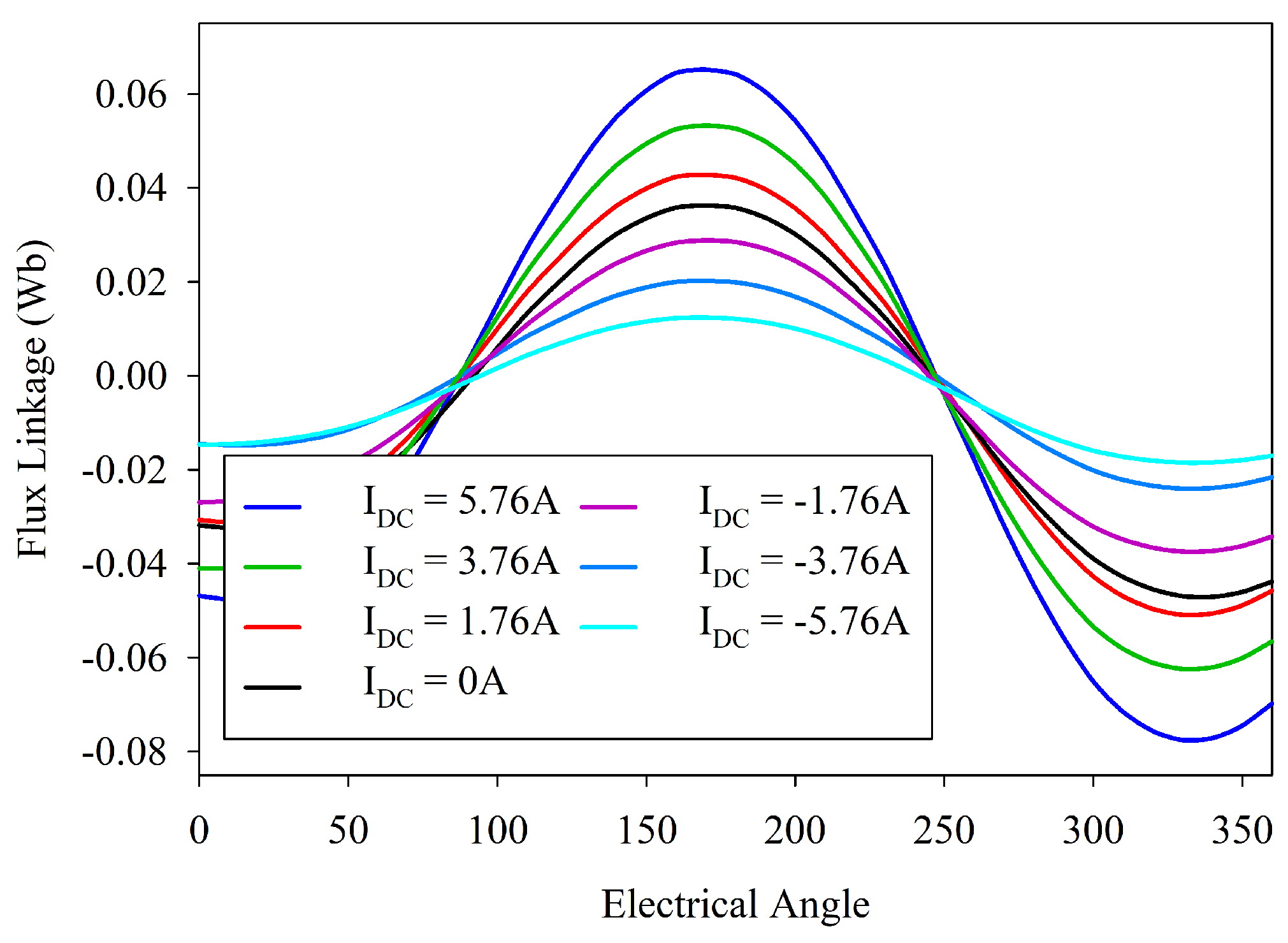
Figure 11 represent the three-phase no-load flux linkage, all the phases are purely sinusoidal. A difference can be noted between the positive maximum value and the negative value, which points towards the presence of a leakage flux. The flux regulation capability at various DC excitation current is shown in
Figure 12. The figure shows that the flux of the proposed machine can be easily controlled by varying the DC current.
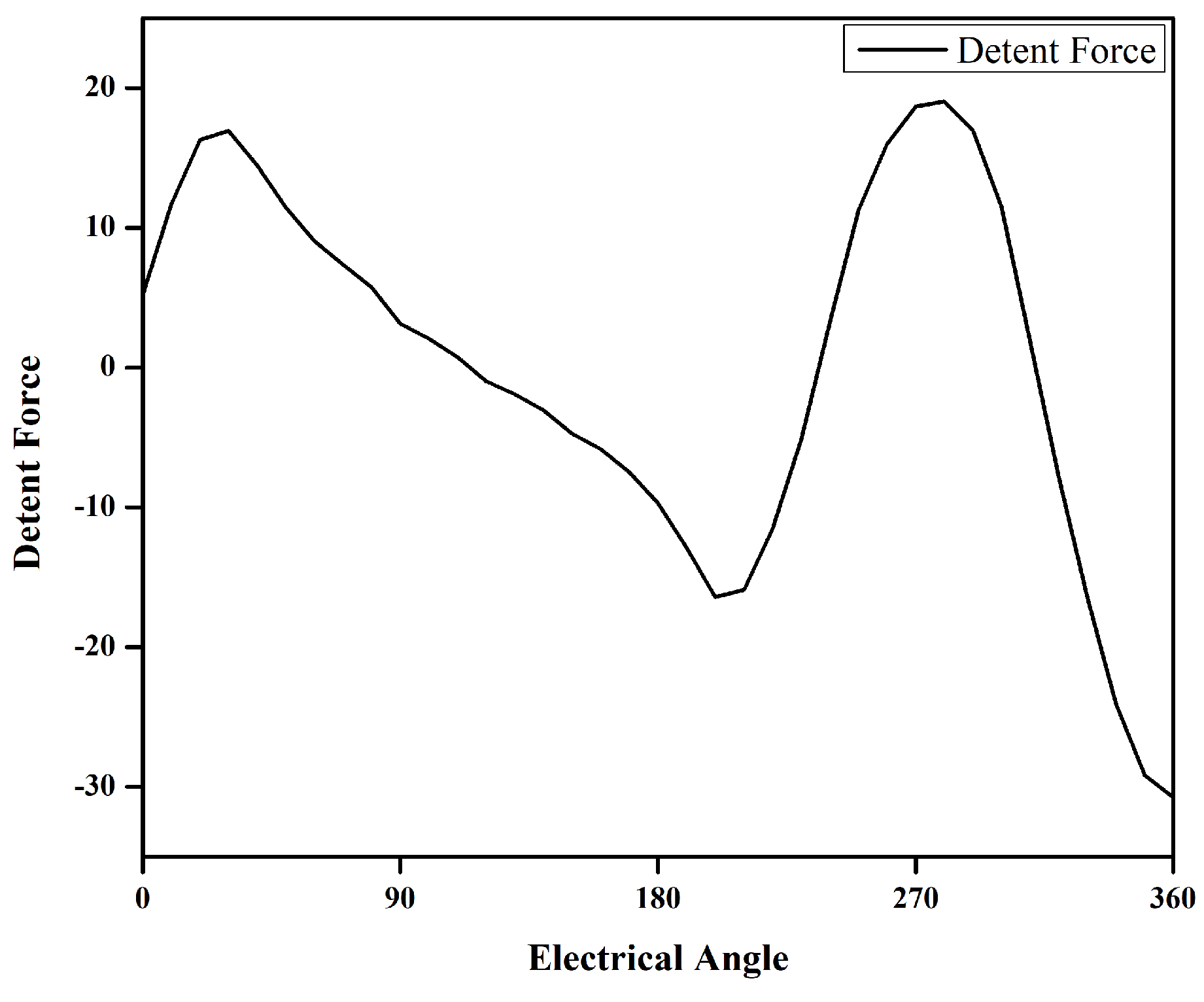
Detent force is analyzed in the no-load study when the AC circuit is open, and only DC is fed to the machine. The presence of a magnet makes it the combination of both DC and PM. Depending on its value, it either pulls the machine backward or pushes it forward. Positive detent force helps push the machine forward, while negative detent force pulls the machine backward. This push and pull are the main reasons for thrust force ripple [
24,
25]. A bipolar detent force can be seen in
Figure 13.
The thrust force of the machine is unipolar in nature, as shown in
Figure 10. The effect of detent force pull and push can be observed from the thrust force graph. When the value of detent force decreases, i.e., at angle 30
to 120
, 160
to 240
, and 300
to 360
, the thrust force decreases, but when the detent force increases, the thrust force also increases.
Table 6 shows the detailed values for THD, peak-to-peak no-load flux linkage, thrust force, and thrust force density.
Performance of the machine is evaluated at different ; it can be observed that the thrust force increases linearly up to some extent, but then the linearity is disturbed because the machine is moving toward saturation.
Figure 14 shows thrust force at different
and
values. Two different values for
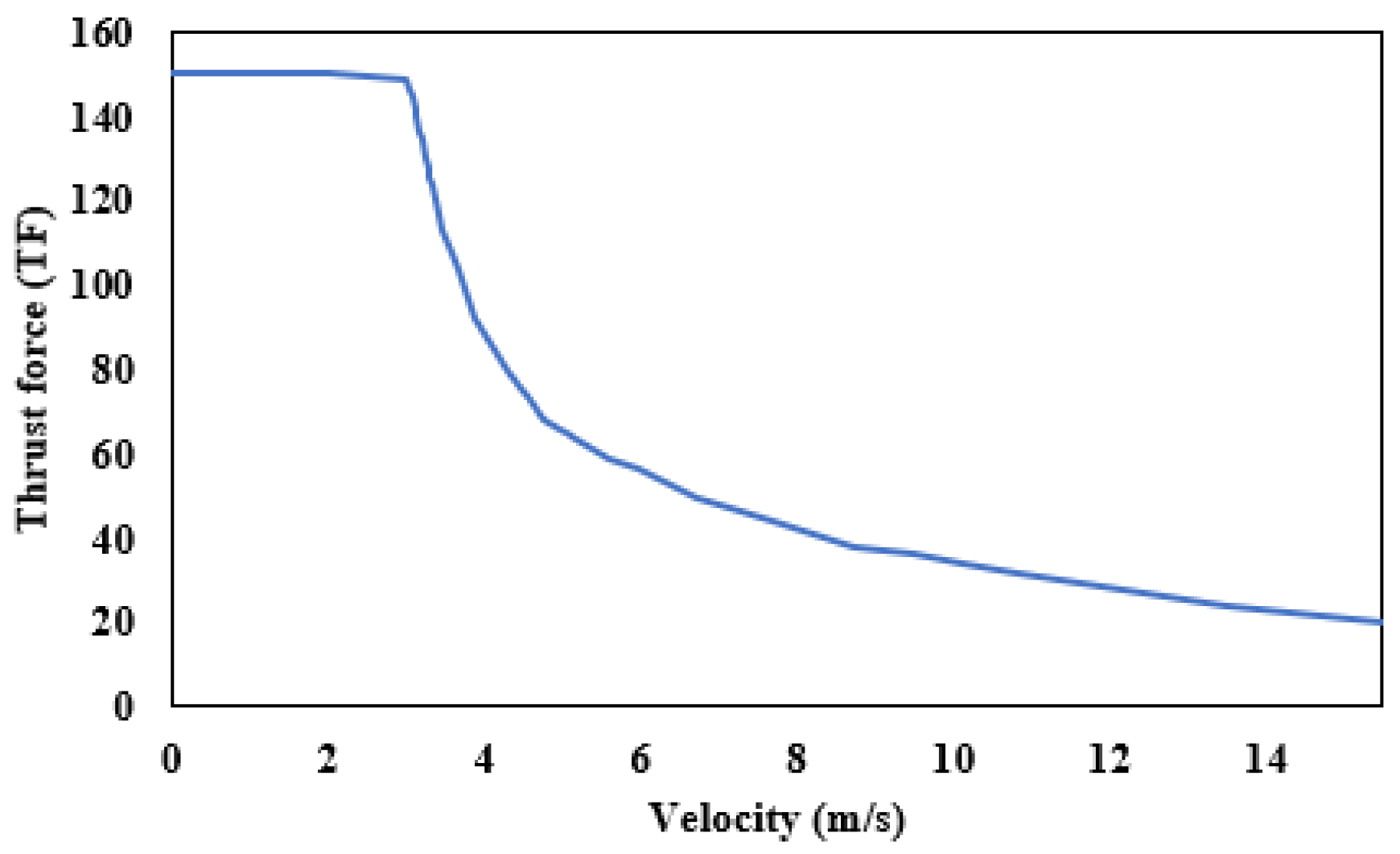
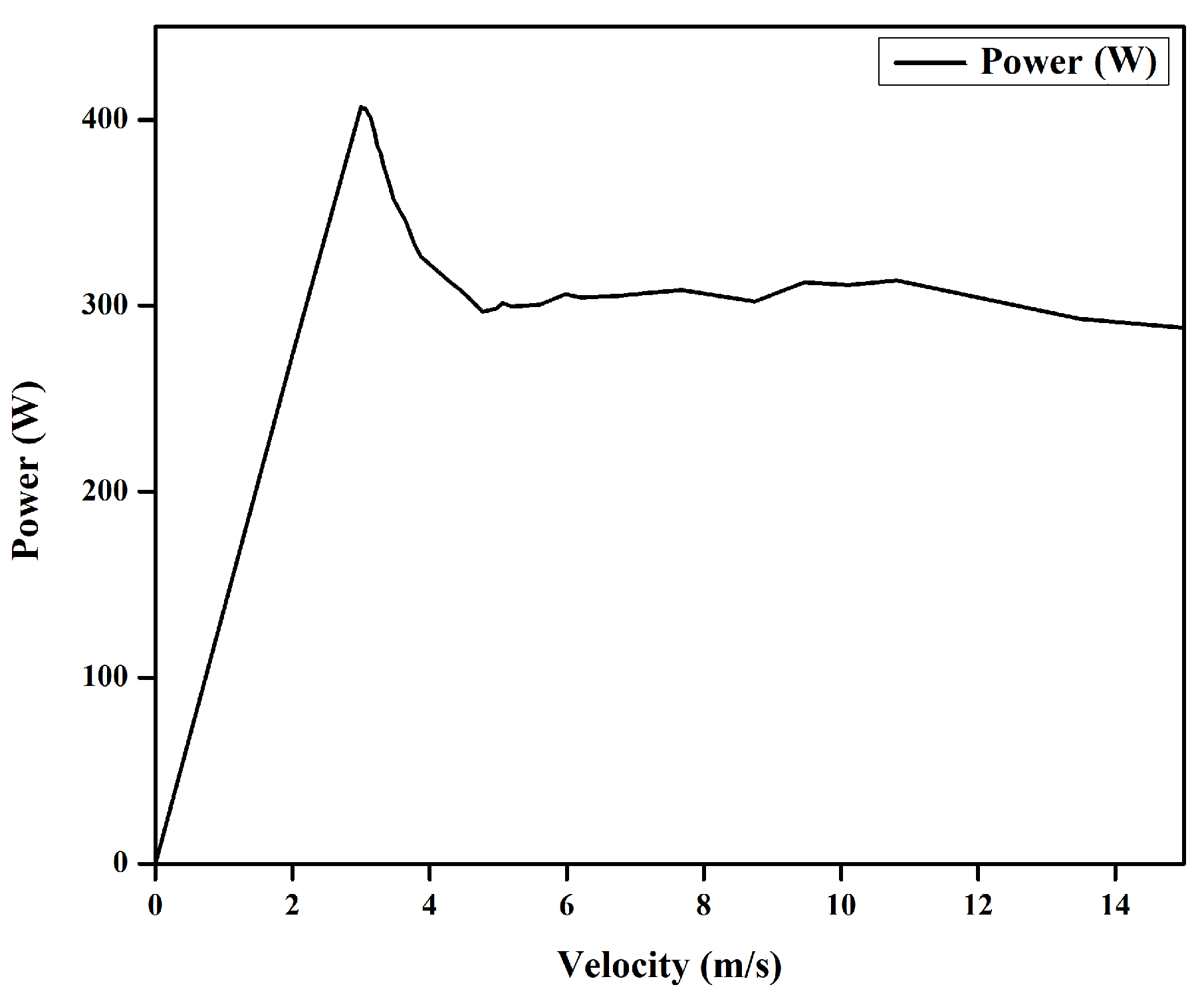
are considered, and the respective thrust force is shown. Thrust force profiles and power of the machine are evaluated at different velocities and are presented in
Figure 15 and
Figure 16.
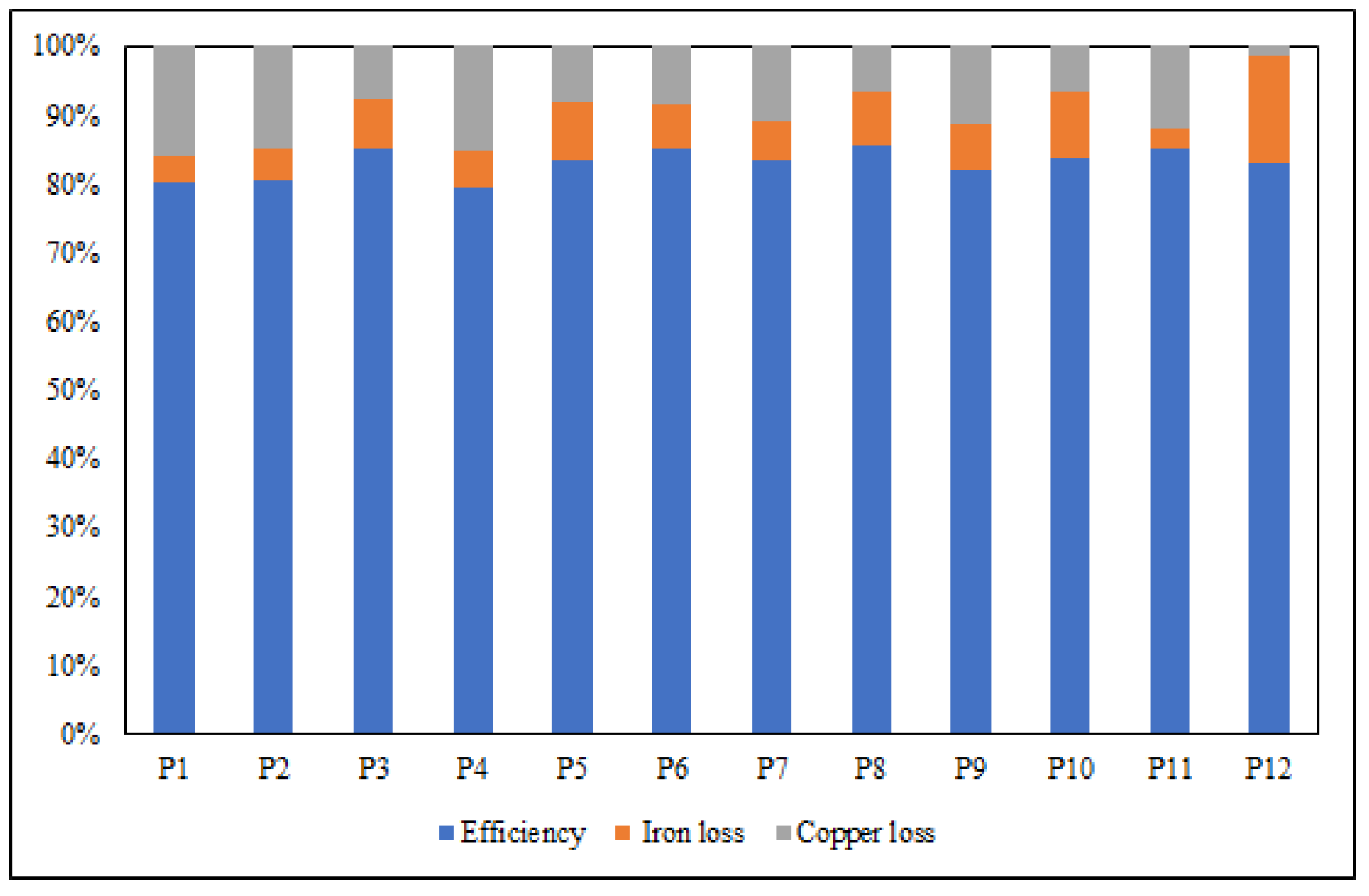
Different points are considered in the thrust force and velocity graph, and both iron core losses and copper losses are calculated. Overall efficiency of the machine is calculated considering both iron and copper loss. Copper loss of the machine can be calculated using Equation (
9).
where
I represents armature current,
represents resistivity of the conductor,
L is the length of the wire,
is the current density of the wire,
N is the number of conductors, and
Q denotes number of slot pairs.
Iron losses of the machine are calculated directly from JMAG simulation, and the overall efficiency of the machine is calculated.
Figure 17 shows losses and overall efficiency of the machine at different velocities. Use of a modular stator reduces the iron volume, thus lowers the iron core losses, increasing the efficiency of the machine. A total of
improvement in efficiency is noted using a modular stator because of the iron losses minimization.
7. Conclusions
In this paper, a LHFSM with a crooked tooth modular stator is proposed. Electromagnetic performance parameters such as no-load flux linkage, detent force, TF, and thrust force profile at different velocities were studied and analyzed. The crooked tooth technique was devised to improve the thrust force of the machine, and its effect at different angles was presented. Geometric optimization technique was used to enhance the thrust force and mitigate detent force and THD of the proposed machine. GA technique was used to optimize the stator tooth, starting angle, and crooked angle. TF of the machine was improved from an initial value of 129.53 N to an optimized value of 150.1823 N, was increased from 243.3 kN/m3 to 306.61 kN/m3, was increased from 0.12 T to 0.14 T, was increased from 0.2601 N to 8.4 N, and the value for THD was slightly reduced from the initial value. Iron losses for the machine were minimized significantly by the use of the modular stator and optimal placement of the modules. In the end, thermal analysis of the machine was performed and was then validated by the LPMEC model. A relative percentage error of was observed.


 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}