
Deep Learning Prediction for Rotational Speed of Turbine in Oscillating Water Column-Type Wave Energy Converter



Abstract
:1. Introduction
2. Conventional Method for OWC-WECs
2.1. Load Control Algorithm (Maximum Power Point Tracking)
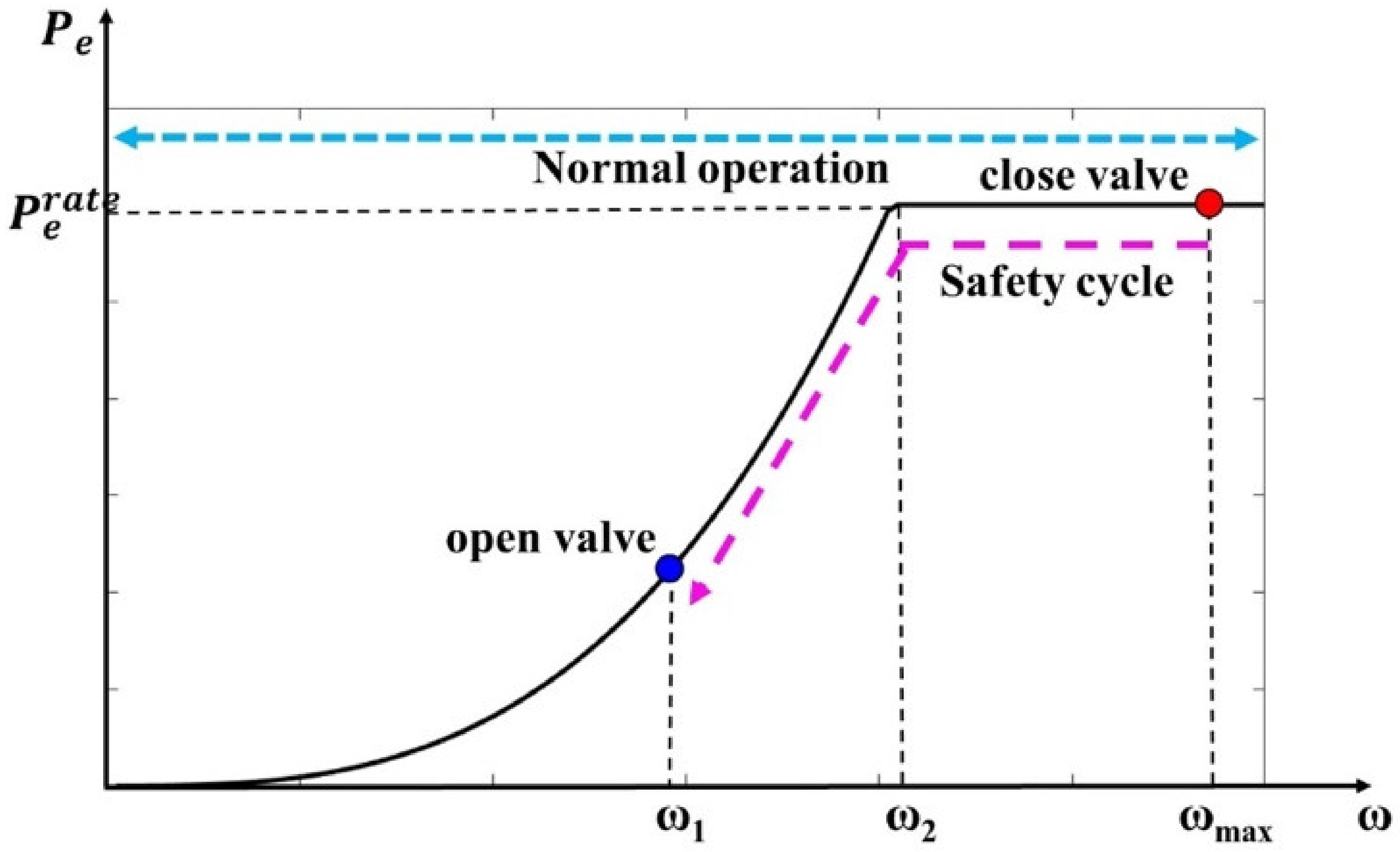
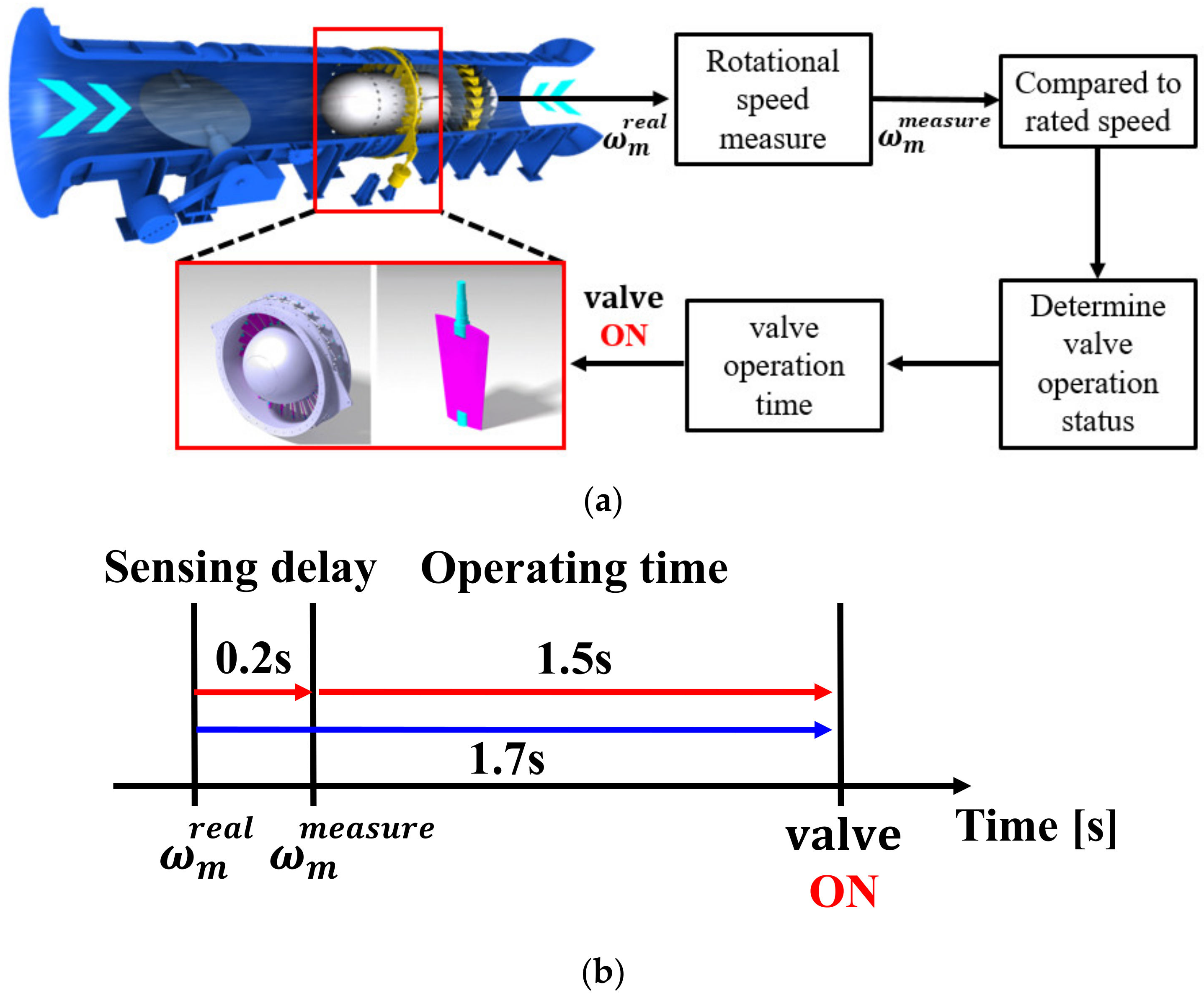
2.2. Rated Control Algorithm (Peak Shaving)
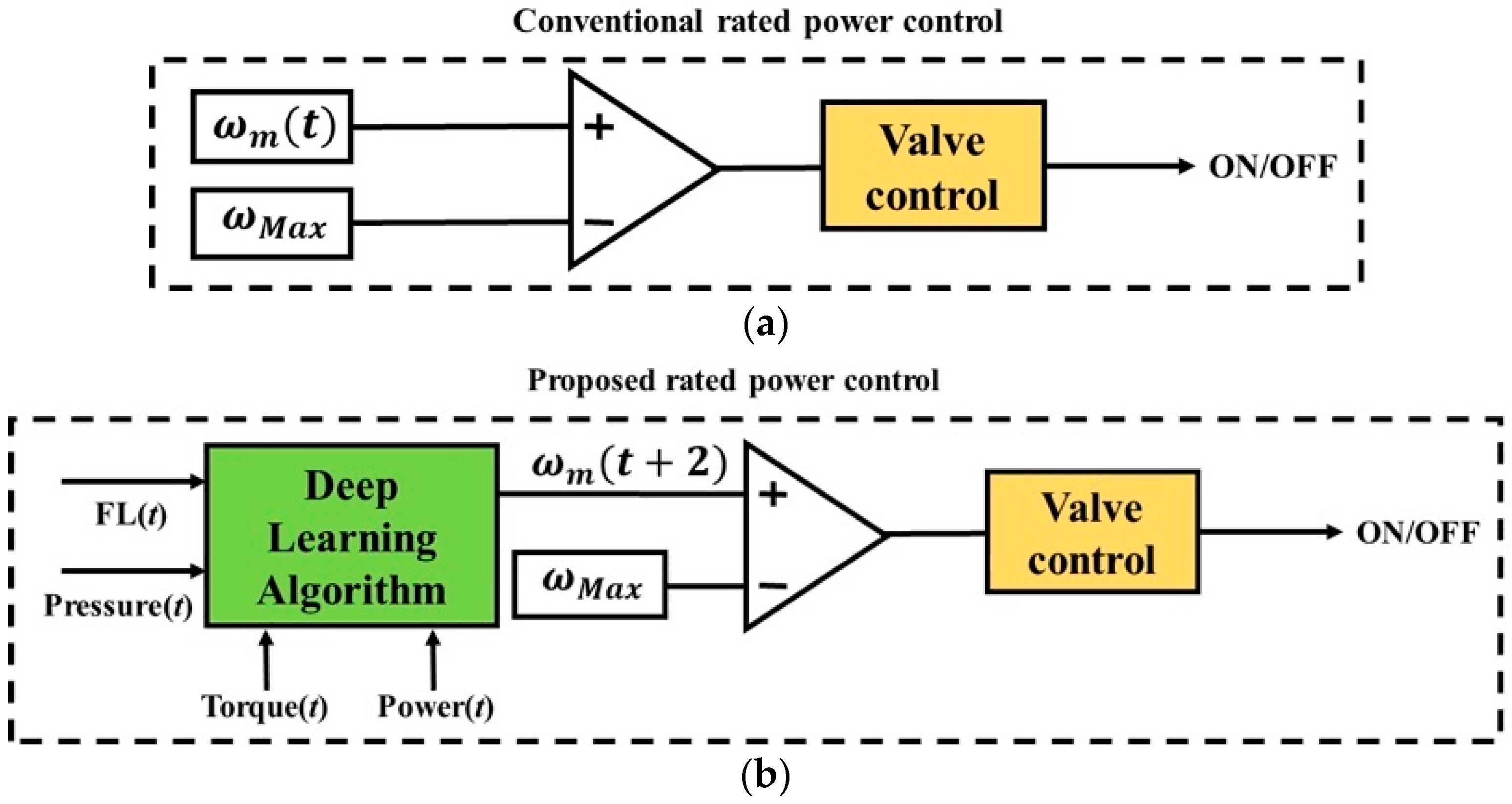
3. Application of Deep Learning Algorithm for Precise Rated Control for OWC-WECs
3.1. Data-Based Power Variation Prediction Technology
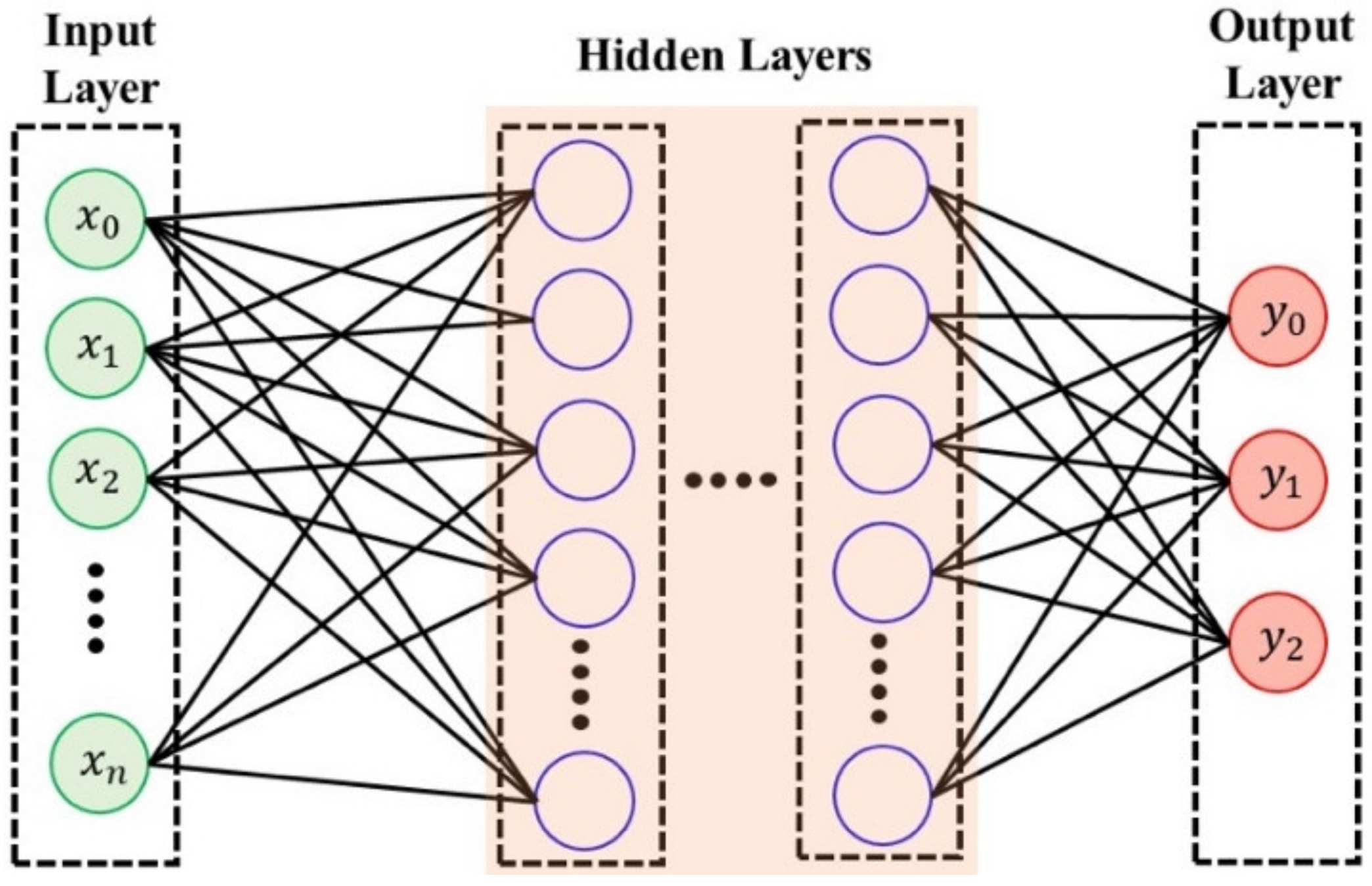
3.2. Classification of Deep Learning Algorithms for Prediction of Turbine Rotational Speed
- Multi-Layer Perceptron (MLP)
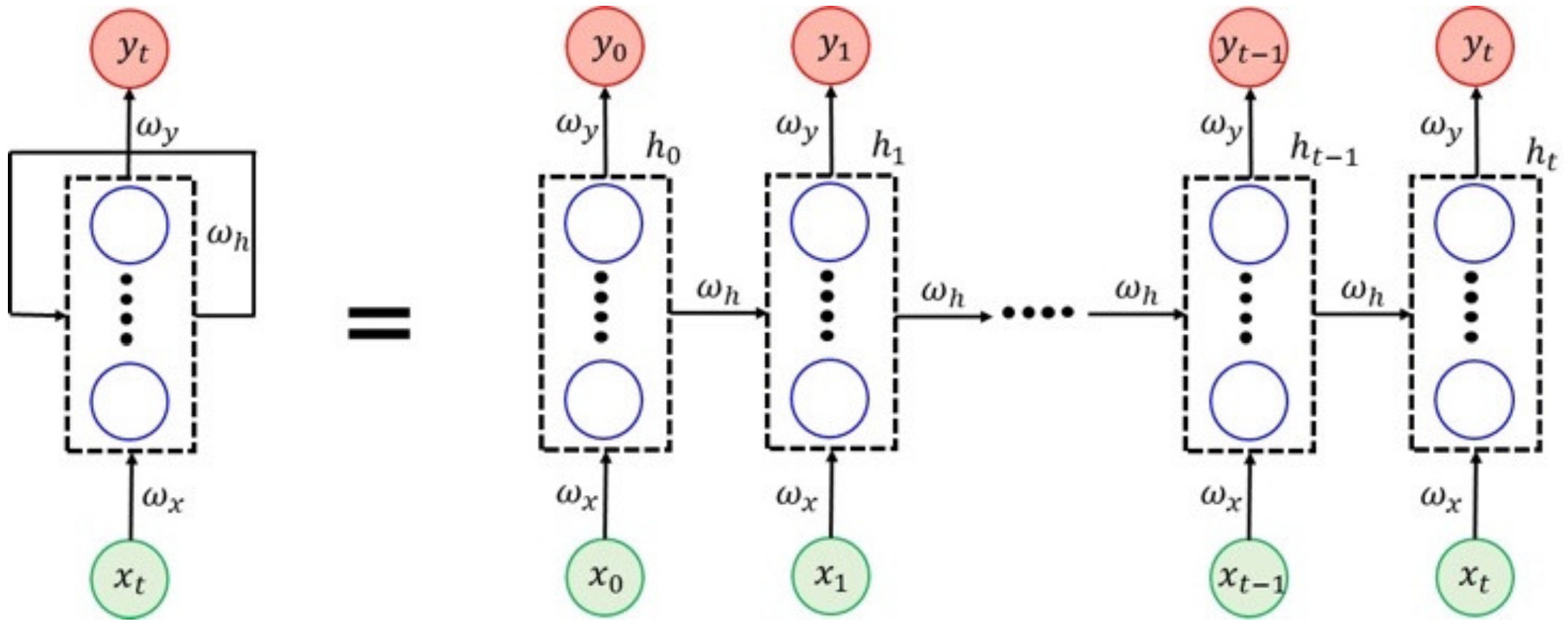
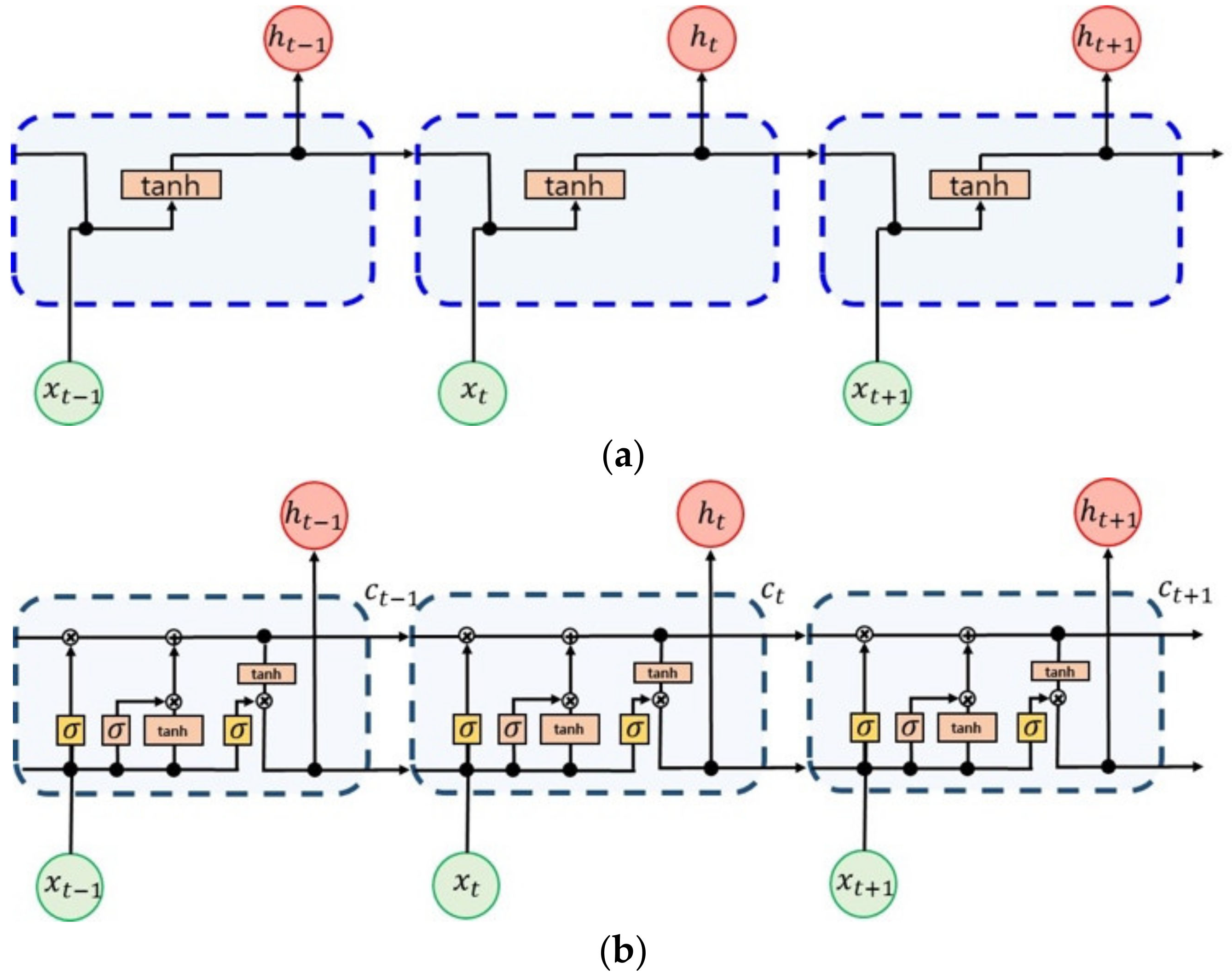
- Recurrent Neural Networks (RNNs)
- Long Short-Term Memory (LSTM)
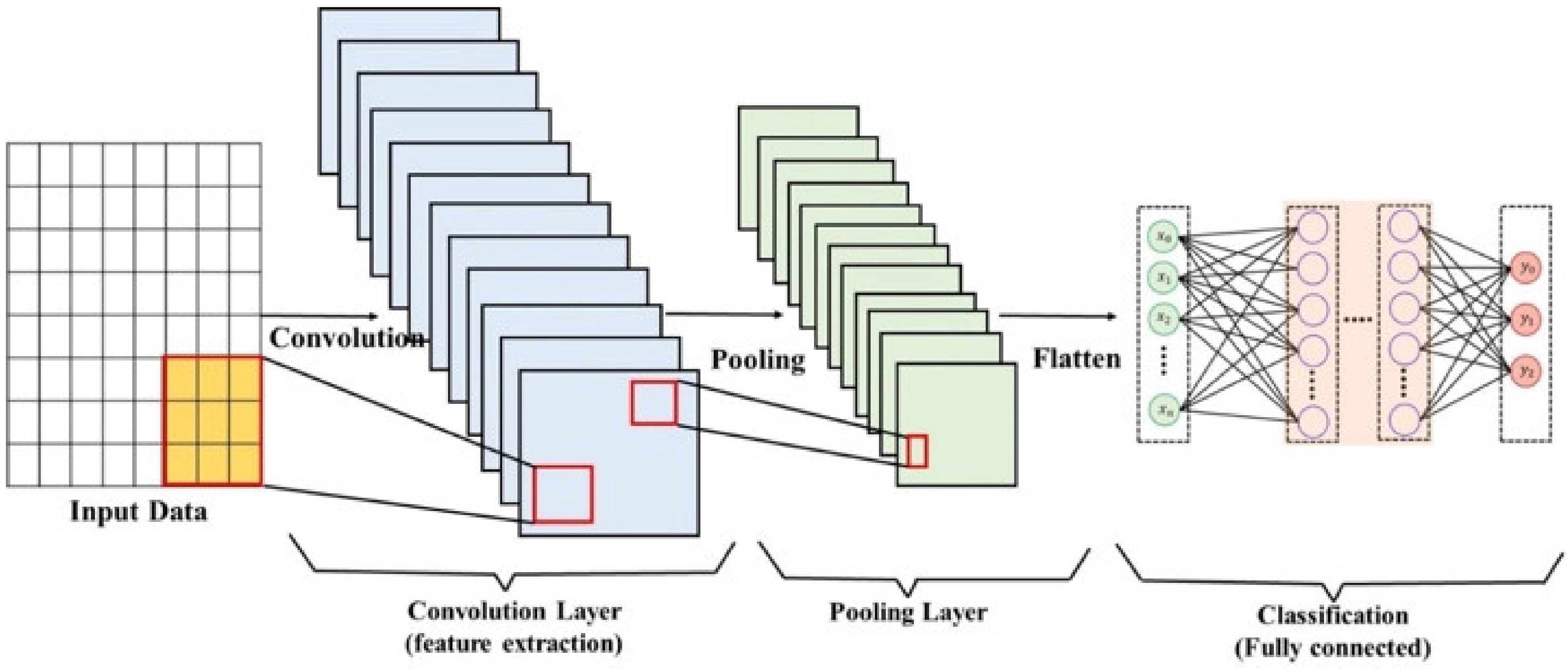
- Convolution Neural Networks (CNN)
4. Construction of Turbine Rotational Speed Prediction Model
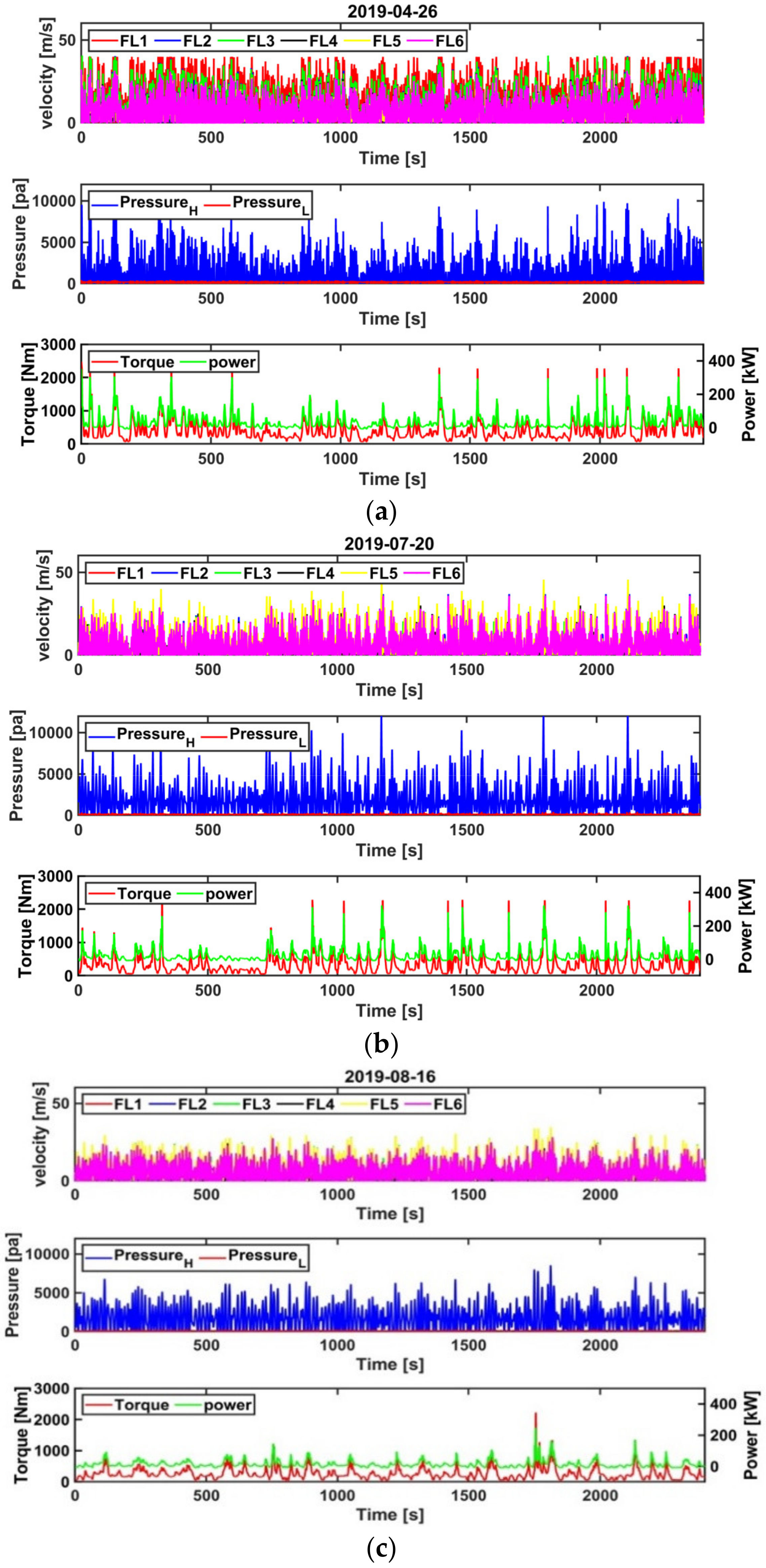
4.1. Data-Based Prediction Technology
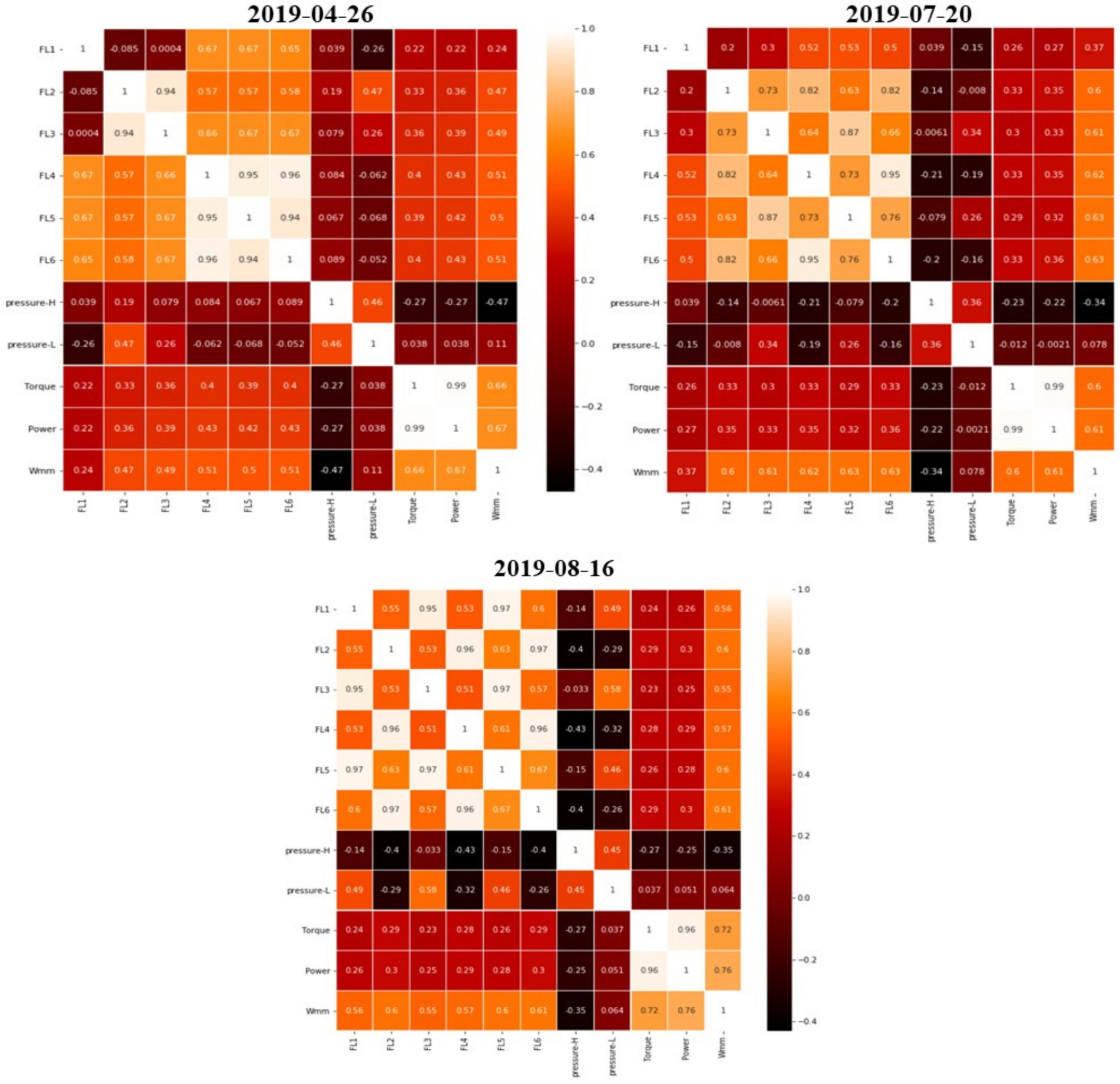
4.2. Analysis of Data Correlation
4.3. Model Training with Training Datasets
4.4. Seperation of Training Dataset and Test Dataset
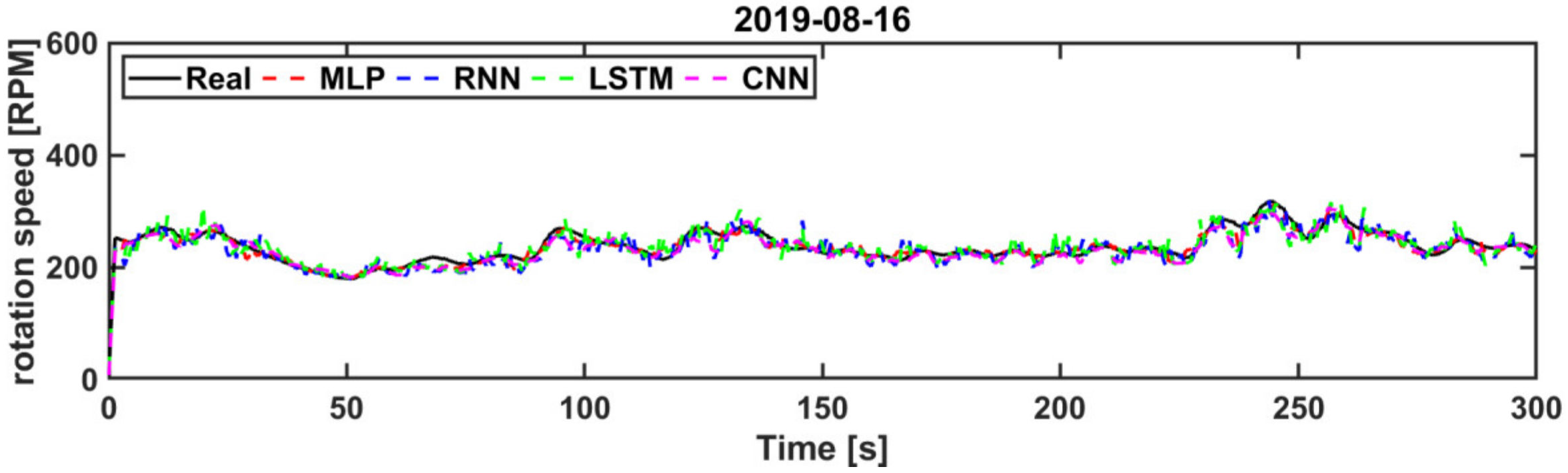
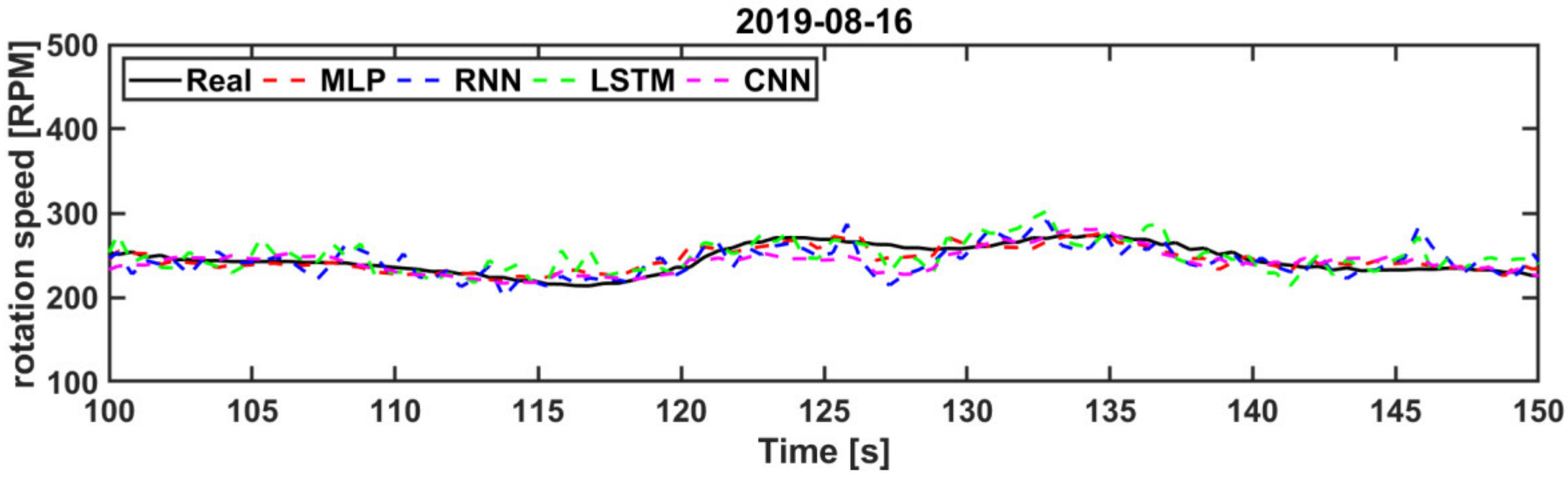
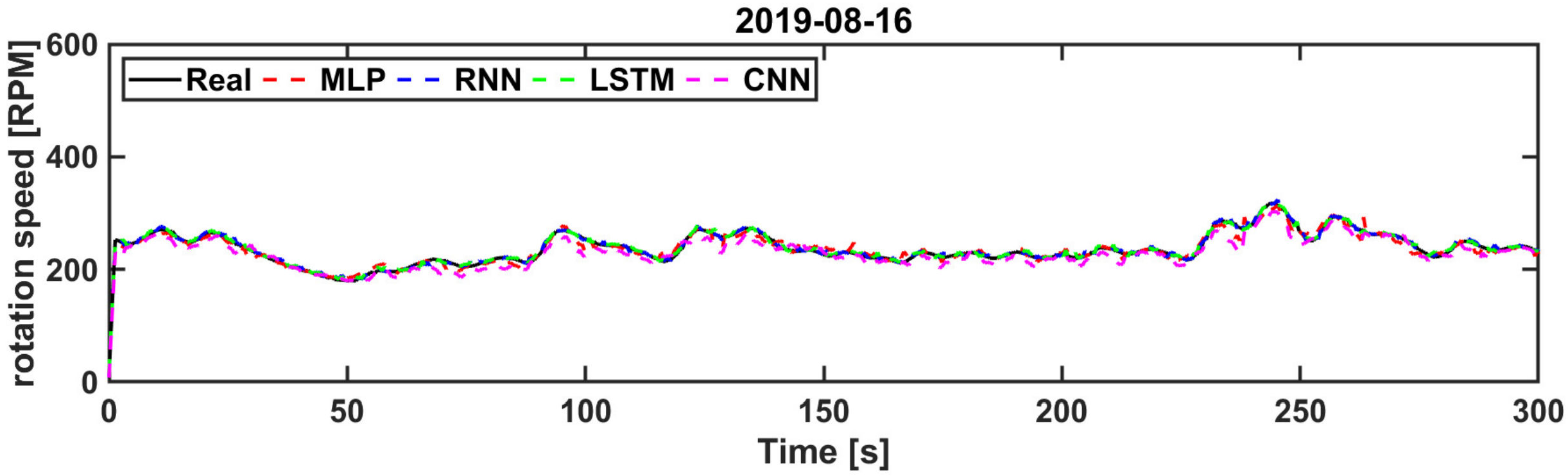
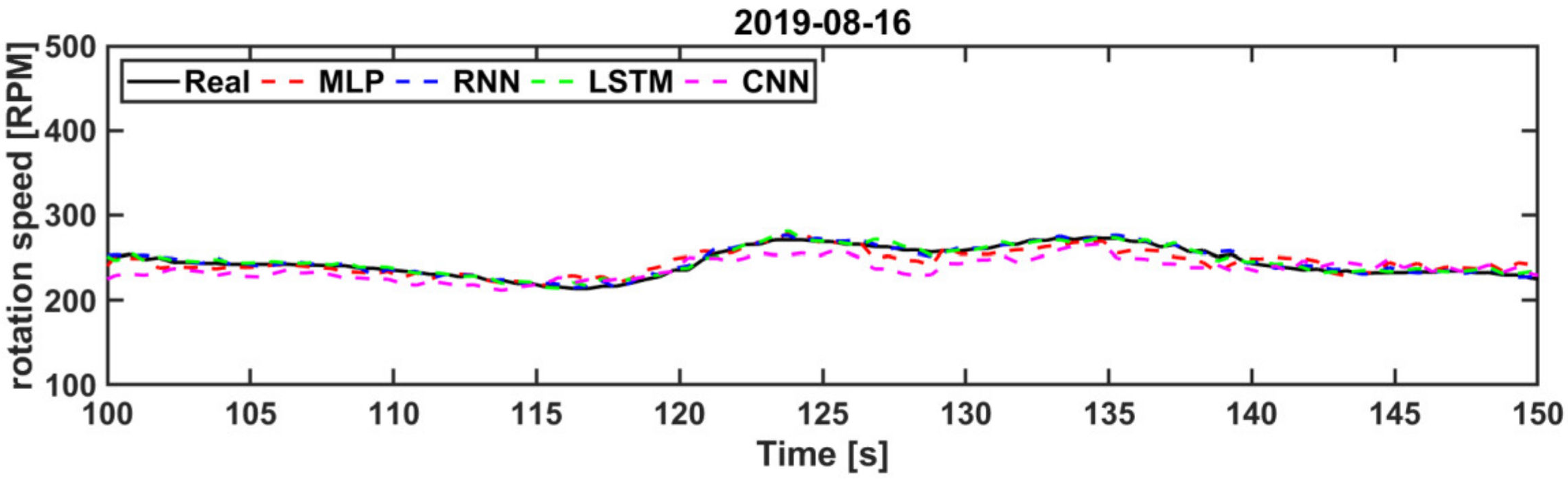
5. Results and Discussion
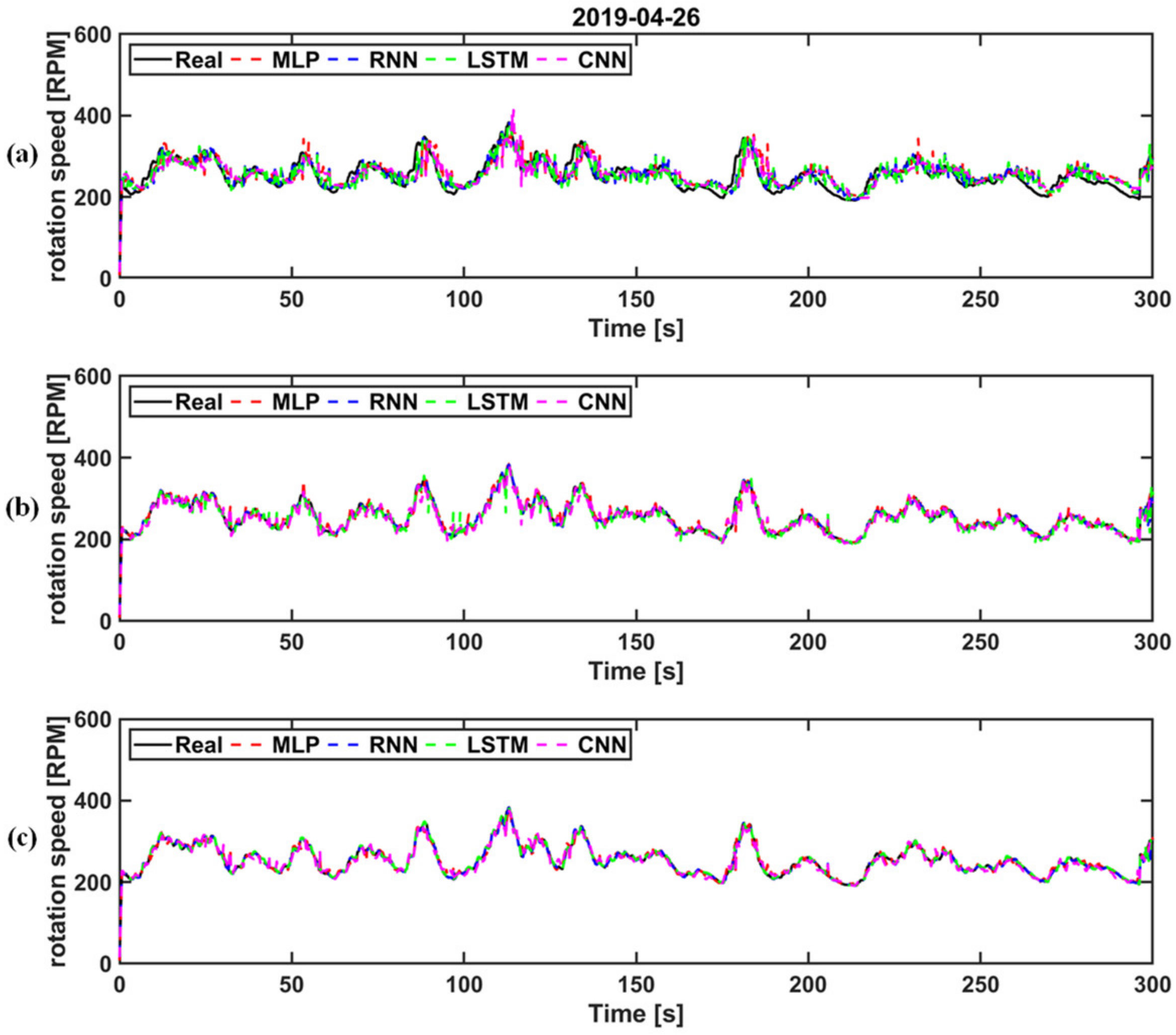
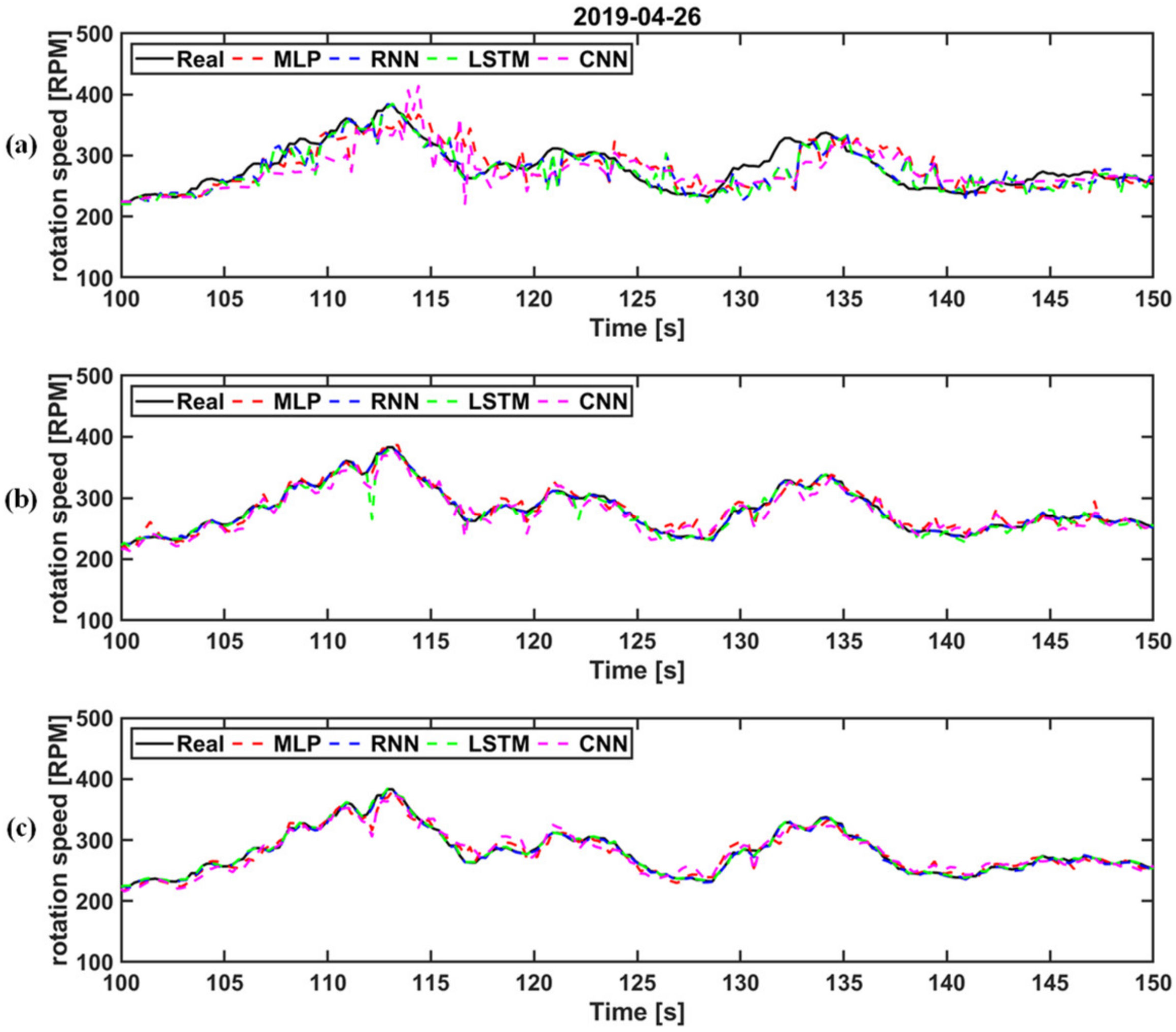
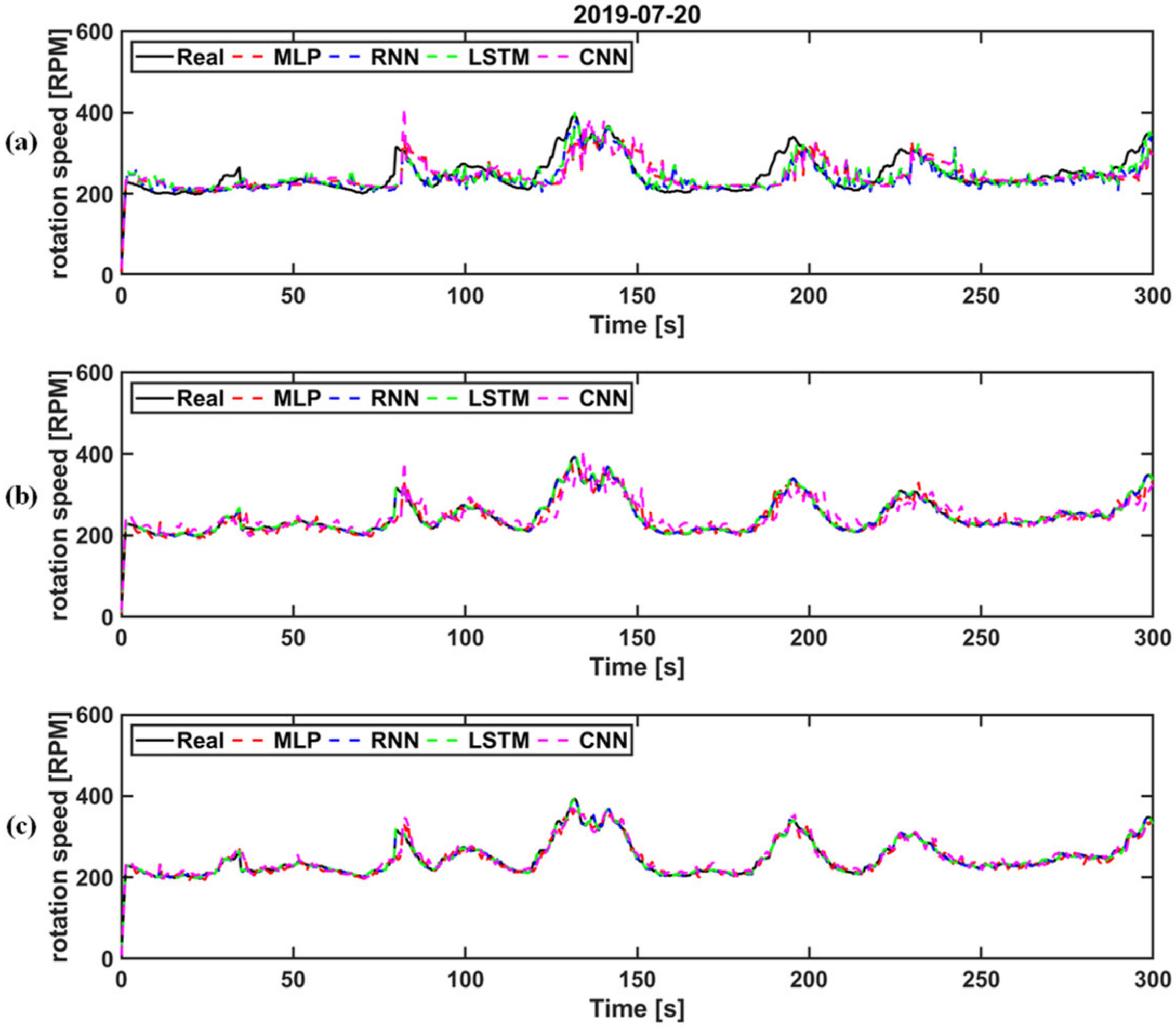
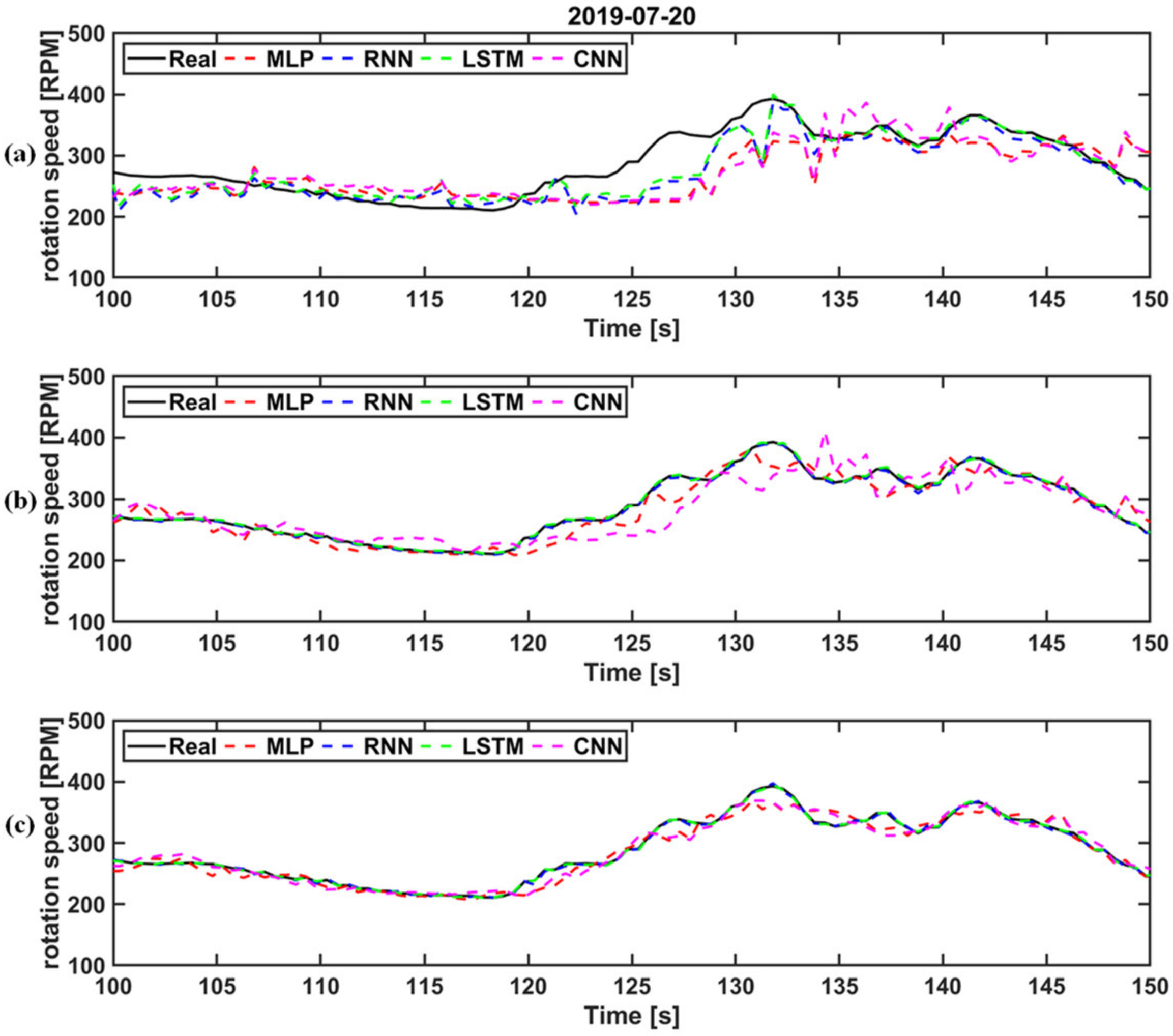
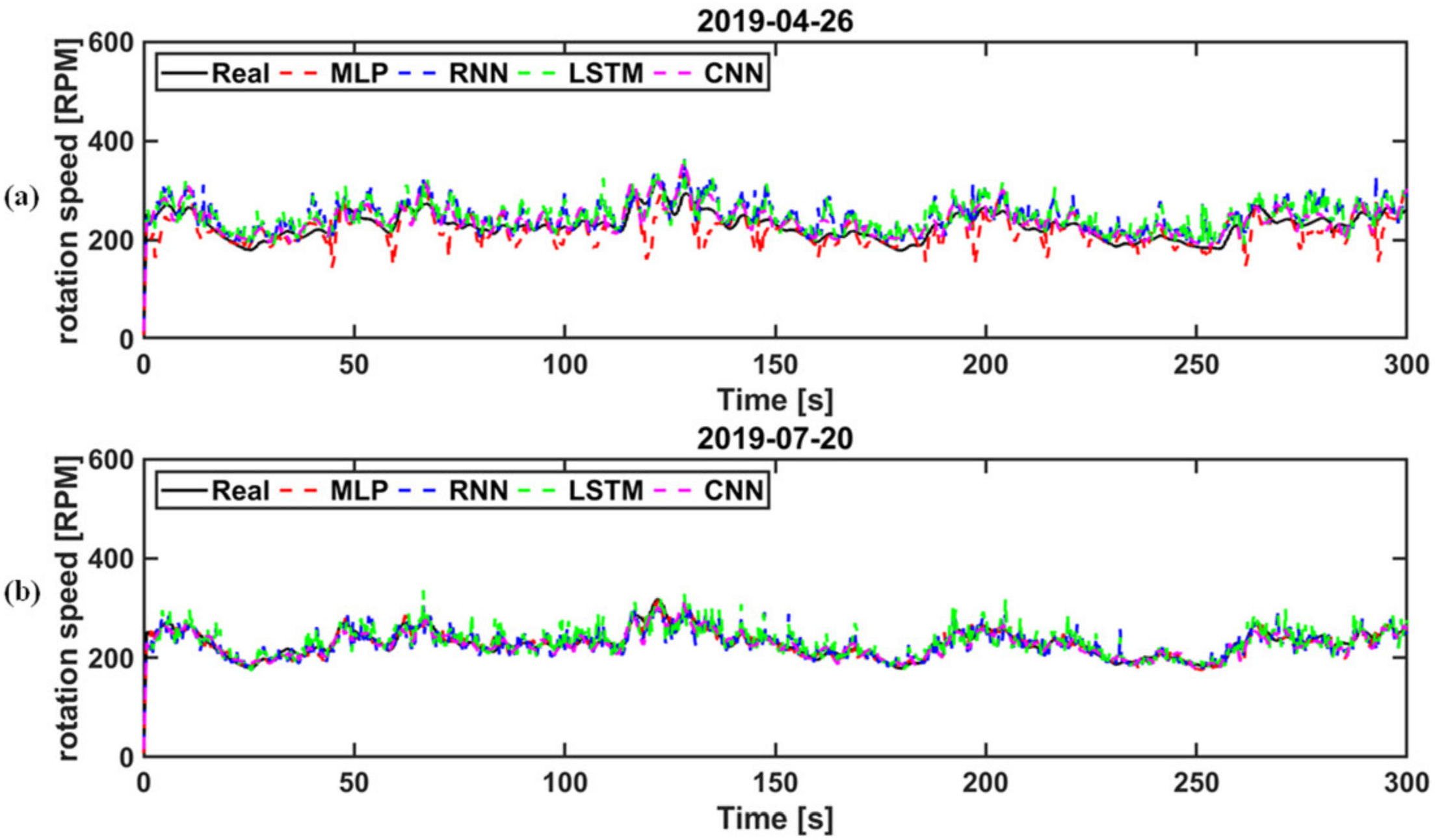
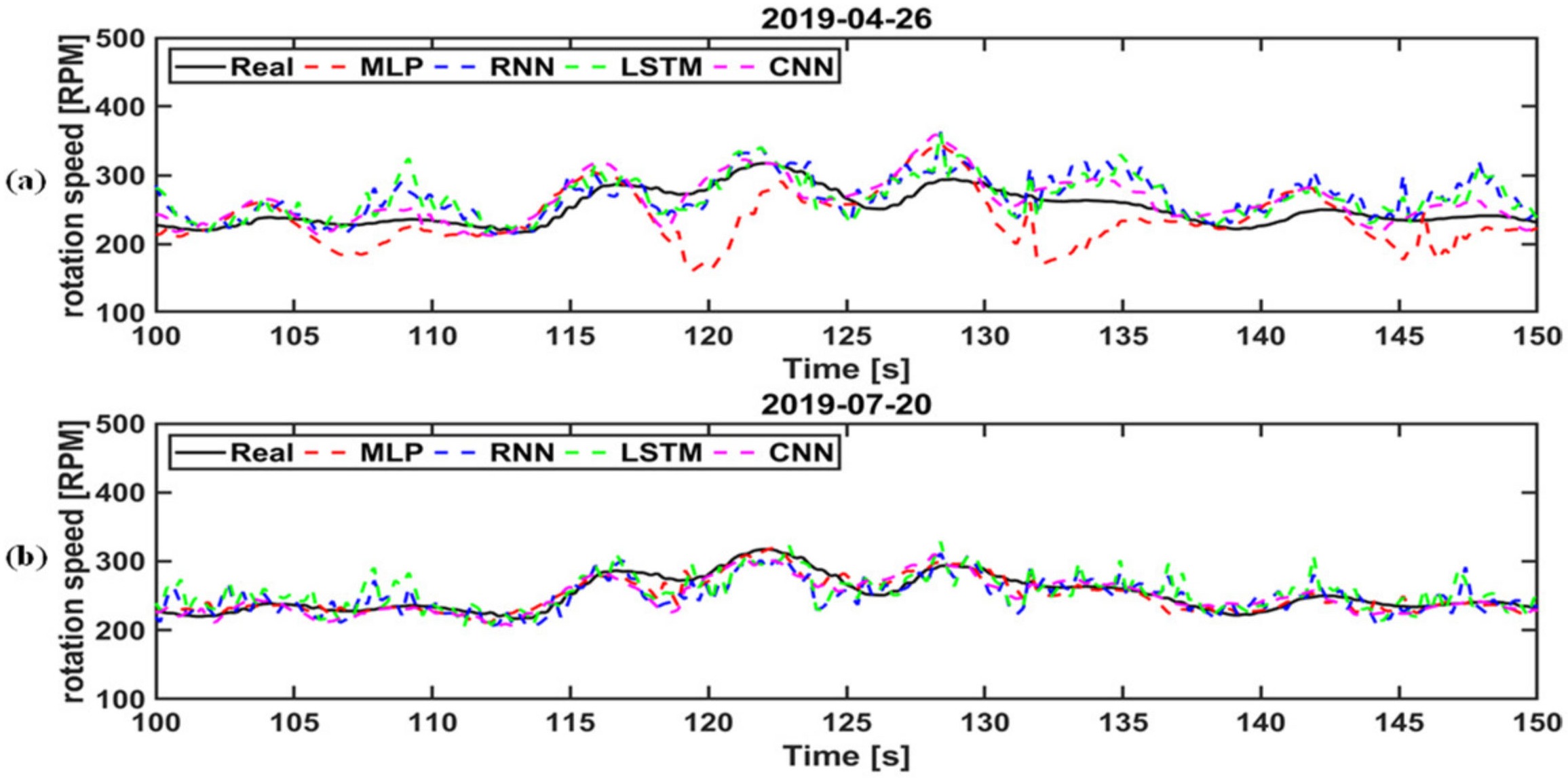
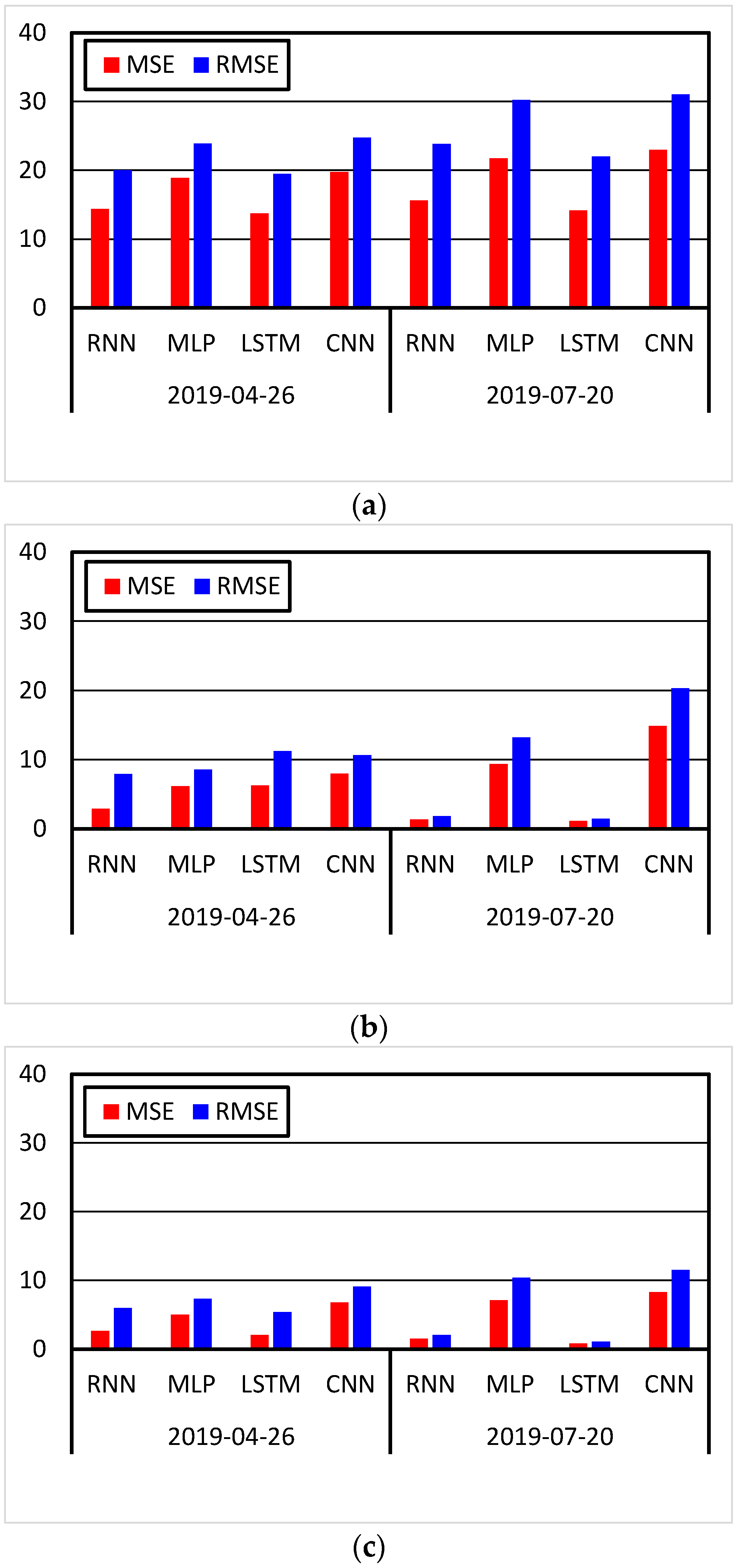
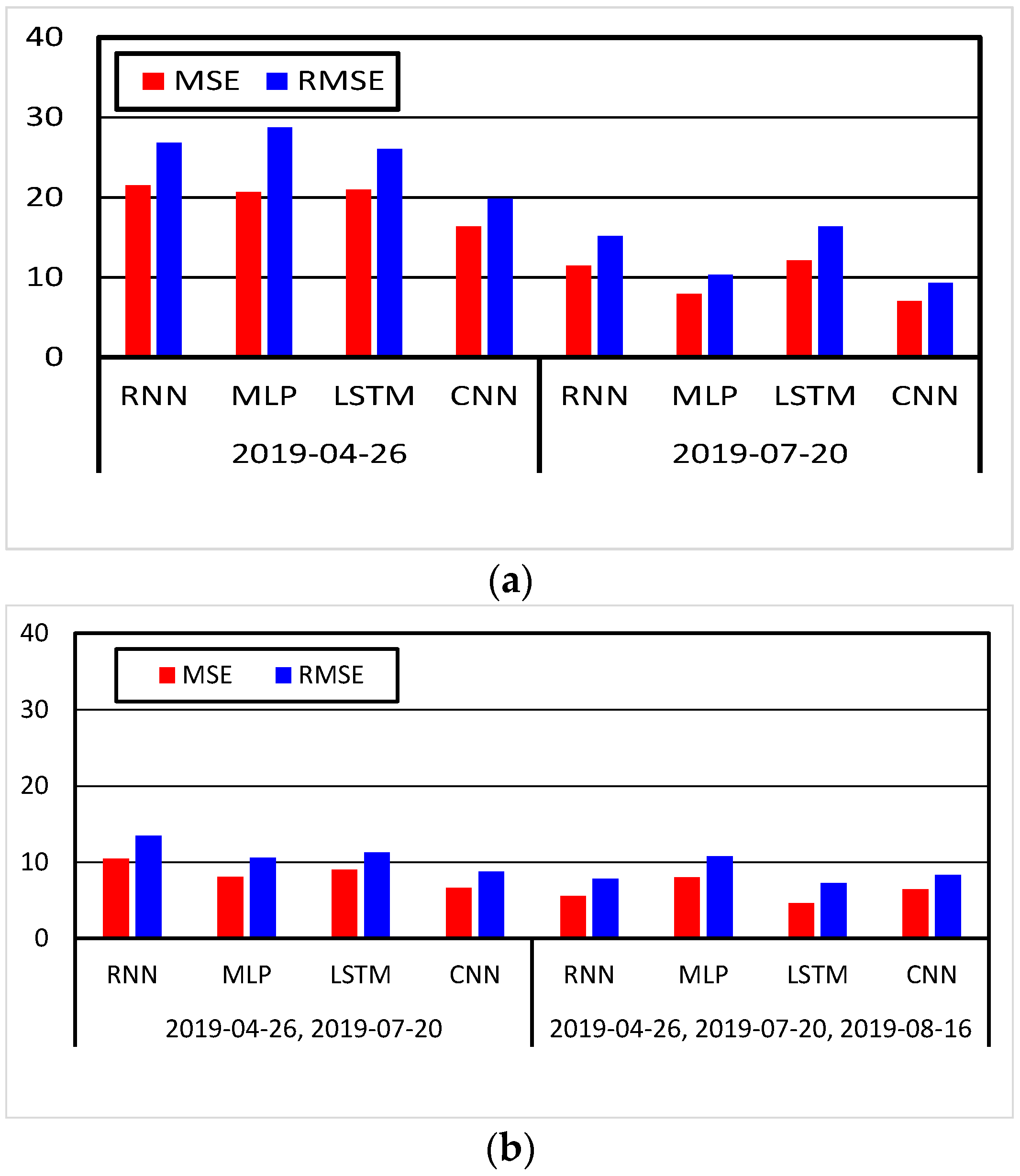
5.1. Comparison of Prediction Results
- Deep learning algorithm performance analysis as a function of the number of input training datasets
- Deep learning algorithm performance analysis as a function of the number of training datasets
5.2. Discussion on Various Deep Learning Model Results
5.3. Model Performance Comparison
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yan, J. Transitions of the future energy systems: Editorial of year 2013 for the 101, volume of applied energy. Appl. Energy 2013, 101, 1–2. [Google Scholar] [CrossRef]
- Krajačić, G.; Duić, N.; da Graça Carvalho, M. How to achieve a 100% RES electricity supply for Portugal? Appl. Energy 2011, 88, 508–517. [Google Scholar] [CrossRef]
- Papaefthymiou, G.; Dragoon, K. Towards 100% renewable energy systems: Uncapping power system flexibility. Energy Policy 2016, 92, 69–82. [Google Scholar] [CrossRef]
- Alizadeh, M.; Moghaddam, M.P.; Amjady, N.; Siano, P.; Sheikh-El-Eslami, M. Flexibility in future power systems with high renewable penetration: A review. Renew. Sustain. Energy Rev. 2016, 57, 1186–1193. [Google Scholar] [CrossRef]
- Wang, J.; Conejo, A.J.; Wang, C.; Yan, J. Smart grids, renewable energy integration, and climate change mitigation—Future electric energy systems. Appl. Energy 2012, 96, 1–3. [Google Scholar] [CrossRef]
- Mork, G.; Barstow, S.; Kabuth, A.; Pontes, M.T. Assessing the global wave energy potential. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Shanghai, China, 20 December 2010; pp. 447–454. [Google Scholar]
- Esteban, M.; Leary, D. Current developments and future prospects of offshore wind and ocean energy. Appl. Energy 2012, 90, 128–136. [Google Scholar] [CrossRef]
- Glendenning, I. Ocean wave power. Appl. Energy 1977, 3, 197–222. [Google Scholar] [CrossRef]
- Falcão, A.F.; Henriques, J.C. Oscillating-water-column wave energy converters and air turbines: A review. Renew. Energy 2016, 85, 1391–1424. [Google Scholar] [CrossRef]
- Falcão, A.D.O. The shoreline OWC wave power plant at the Azores. In Proceedings of the 4th European Wave Energy Conference, Aalborg, Denmark, 4–6 December 2000. [Google Scholar]
- Heath, T.V. The development and installation of the Limpet wave energy converter. In World Renewable Energy Congress VI; Pergamon Press: Oxford, UK, 2000; Chapter 334; pp. 1619–1622. [Google Scholar] [CrossRef]
- Torre-Enciso, Y.; Ortubia, I.; De Aguileta, L.L.; Marqués, J. Mutriku wave power plant: From the thinking out to the reality. In Proceedings of the 8th European Wave Tidal Energy Conference, Uppsala, Sweden, 7–10 September 2009; pp. 319–329. [Google Scholar]
- Mala, K.; Badrinath, S.N.; Chidanand, S.; Kailash, G.; Jayashankar, V. Analysis of power modules in the Indian wave energy plant. In Proceedings of the Annual IEEE India Conference, Ahmedabad, India, 18–20 December 2009; pp. 1–4. [Google Scholar] [CrossRef]
- Alcorn, R.; Blavette, A.; Healy, M.; Lewis, A.; Raymond, A.; Anne, B.; Mark, H.; Anthony, L. FP7 EU funded CORES wave energy project: A coordinators’ perspective on the Galway Bay sea trials. Underw. Technol. 2014, 32, 51–59. [Google Scholar] [CrossRef] [Green Version]
- Yu, Z.; Jiang, N.; You, Y. Load control method and its realization on an OWC wave power converter. In OMAE; ASME: New York, NY, USA, 1994; Volume 1. [Google Scholar]
- Justino, P.A.P.; de O. Falcaõ, A.F. Rotational Speed Control of an OWC Wave Power Plant. J. Offshore Mech. Arct. Eng. 1999, 121, 65–70. [Google Scholar] [CrossRef]
- Falcão, A.; Henriques, J.; Gato, L. Rotational speed control and electrical rated power of an oscillating-water-column wave energy converter. Energy 2017, 120, 253–261. [Google Scholar] [CrossRef]
- Henriques, J.; Gomes, R.; Gato, L.; Falcão, A.; Robles, E.; Ceballos, S. Testing and control of a power take-off system for an oscillating-water-column wave energy converter. Renew. Energy 2015, 85, 714–724. [Google Scholar] [CrossRef]
- Carrelhas, A.; Gato, L.; Henriques, J.; Falcão, A.; Varandas, J. Test results of a 30 kW self-rectifying biradial air turbine-generator prototype. Renew. Sustain. Energy Rev. 2019, 109, 187–198. [Google Scholar] [CrossRef]
- Fadare, D. The application of artificial neural networks to mapping of wind speed profile for energy application in Nigeria. Appl. Energy 2010, 87, 934–942. [Google Scholar] [CrossRef]
- Asrari, A.; Wu, T.X.; Ramos, B. A Hybrid Algorithm for Short-Term Solar Power Prediction—Sunshine State Case Study. IEEE Trans. Sustain. Energy 2016, 8, 582–591. [Google Scholar] [CrossRef]
- De Paiva, G.M.; Pimentel, S.P.; Alvarenga, B.P.; Marra, E.; Mussetta, M.; Leva, S. Multiple Site Intraday Solar Irradiance Forecasting by Machine Learning Algorithms: MGGP and MLP Neural Networks. Energies 2020, 13, 3005. [Google Scholar] [CrossRef]
- Hu, J.; Wang, J.; Zeng, G. A hybrid forecasting approach applied to wind speed time series. Renew. Energy 2013, 60, 185–194. [Google Scholar] [CrossRef]
- Costa, A.; Crespo, A.; Navarro, J.; Lizcano, G.; Madsen, H.; Feitosa, E. A review on the young history of the wind power short-term prediction. Renew. Sustain. Energy Rev. 2008, 12, 1725–1744. [Google Scholar] [CrossRef] [Green Version]
- More, A.; Deo, M. Forecasting wind with neural networks. Mar. Struct. 2003, 16, 35–49. [Google Scholar] [CrossRef]
- Ju, C.; Wang, P.; Goel, L.; Xu, Y. A two-layer energy management system for microgrids with hybrid energy storage considering degradation costs. IEEE Trans. Smart Grid 2017, 9, 6047–6057. [Google Scholar] [CrossRef]
- Hernández-Lobato, J.M.; Adams, R. Probabilistic backpropagation for scalable learning of bayesian neural networks. In Proceedings of the International Conference on Machine Learning, Lille, France, 7–9 July 2015; pp. 1861–1869. [Google Scholar]
- Yin, X.; Jiang, Z.; Pan, L. Recurrent neural network based adaptive integral sliding mode power maximization control for wind power systems. Renew. Energy 2019, 145, 1149–1157. [Google Scholar] [CrossRef]
- Cheng, J.; Dong, L.; Lapata, M. Long short-term memory-networks for machine reading. arXiv 2016, arXiv:1601.06733. [Google Scholar]
- Ghorbanzadeh, O.; Blaschke, T.; Gholamnia, K.; Meena, S.R.; Tiede, D.; Aryal, J. Evaluation of Different Machine Learning Methods and Deep-Learning Convolutional Neural Networks for Landslide Detection. Remote Sens. 2019, 11, 196. [Google Scholar] [CrossRef] [Green Version]
- Chan, R.; Kim, K.W.; Park, J.Y.; Park, S.W.; Kim, K.H.; Kwak, S.S. Power Performance Analysis According to the Configuration and Load Control Algorithm of Power Take-Off System for Oscillating Water Column Type Wave Energy Converters. Energies 2020, 13, 6415. [Google Scholar] [CrossRef]
- Khan, P.W.; Byun, Y.-C.; Lee, S.-J.; Park, N. Machine Learning Based Hybrid System for Imputation and Efficient Energy Demand Forecasting. Energies 2020, 13, 2681. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Training Dataset | Test Dataset | Number of Input Datasets | |
|---|---|---|---|---|
| Number of input training datasets | 1 | Da | Da | 2 |
| 6 | ||||
| 10 | ||||
| 2 | Db | Db | 2 | |
| 6 | ||||
| 10 | ||||
| Number of input training datasets | 3 | Da | Dc | 10 |
| 4 | Db | Dc | 10 | |
| 5 | Da, Db | Dc | 10 | |
| 6 | Da, Db, Dc | Dc | 10 |
| Case | Training Data | Test Data | Number of Input Data | MLP | RNN | LSTM | CNN | |
|---|---|---|---|---|---|---|---|---|
| Number of input training data | 1 | Da | Da | 2 | 3 | 2 | 1 | 4 |
| 6 | 3 | 1 | 2 | 4 | ||||
| 10 | 3 | 2 | 1 | 4 | ||||
| 2 | Db | Db | 2 | 3 | 2 | 1 | 4 | |
| 6 | 3 | 2 | 1 | 4 | ||||
| 10 | 3 | 2 | 1 | 4 | ||||
| Amount of input training data | 3 | Da | Dc | 10 | 4 | 3 | 2 | 1 |
| 4 | Db | Dc | 10 | 2 | 3 | 4 | 1 | |
| 5 | Da, Db | Dc | 10 | 1 | 4 | 3 | 2 | |
| 6 | Da, Db, Dc | Dc | 10 | 3 | 2 | 1 | 4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roh, C.; Kim, K.-H. Deep Learning Prediction for Rotational Speed of Turbine in Oscillating Water Column-Type Wave Energy Converter. Energies 2022, 15, 572. https://doi.org/10.3390/en15020572
Roh C, Kim K-H. Deep Learning Prediction for Rotational Speed of Turbine in Oscillating Water Column-Type Wave Energy Converter. Energies. 2022; 15(2):572. https://doi.org/10.3390/en15020572
Chicago/Turabian StyleRoh, Chan, and Kyong-Hwan Kim. 2022. "Deep Learning Prediction for Rotational Speed of Turbine in Oscillating Water Column-Type Wave Energy Converter" Energies 15, no. 2: 572. https://doi.org/10.3390/en15020572
APA StyleRoh, C., & Kim, K.-H. (2022). Deep Learning Prediction for Rotational Speed of Turbine in Oscillating Water Column-Type Wave Energy Converter. Energies, 15(2), 572. https://doi.org/10.3390/en15020572