
The Shape Optimization and Experimental Research of Heave Plate Applied to the New Wave Energy Converter


Abstract
:1. Introduction
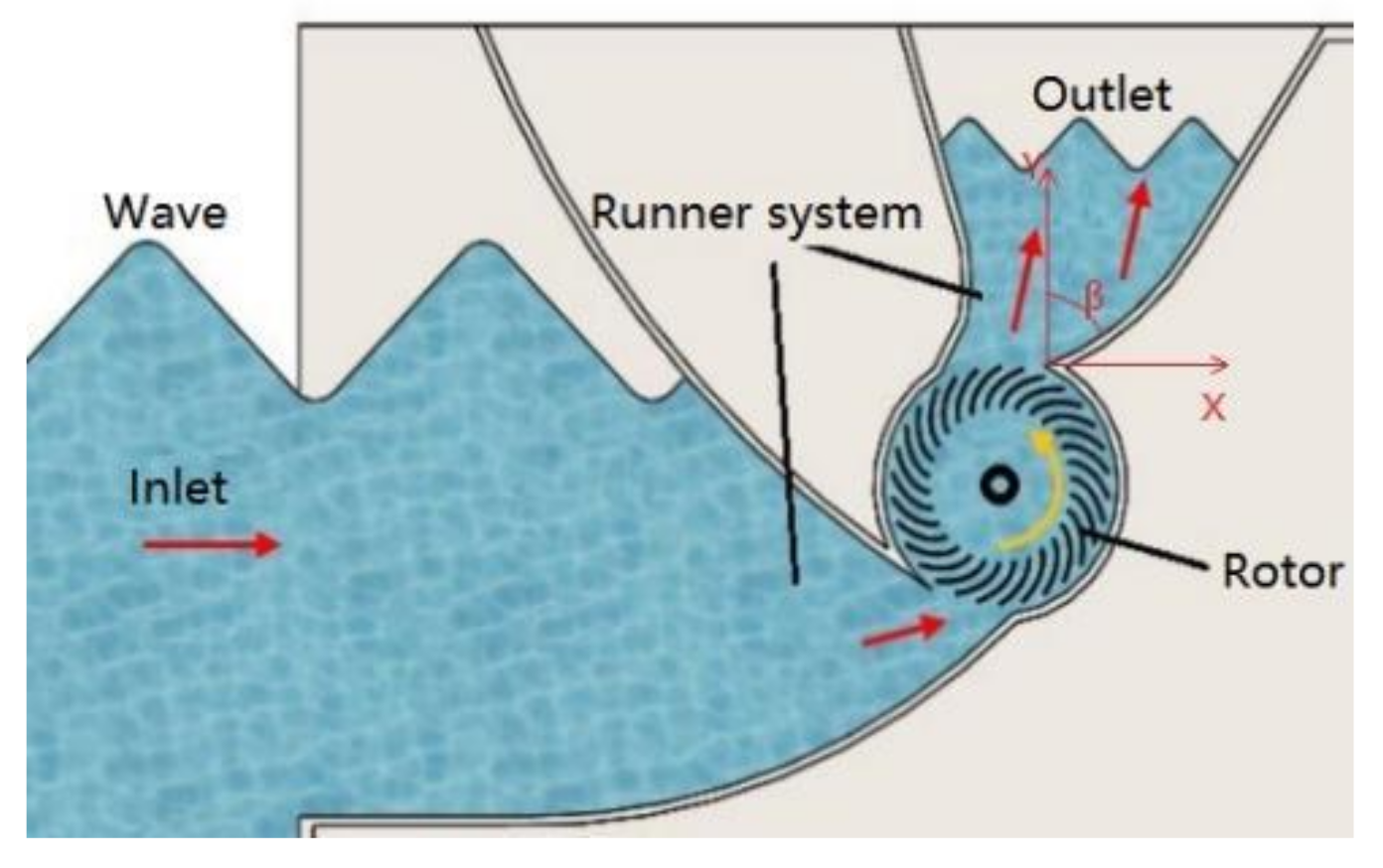
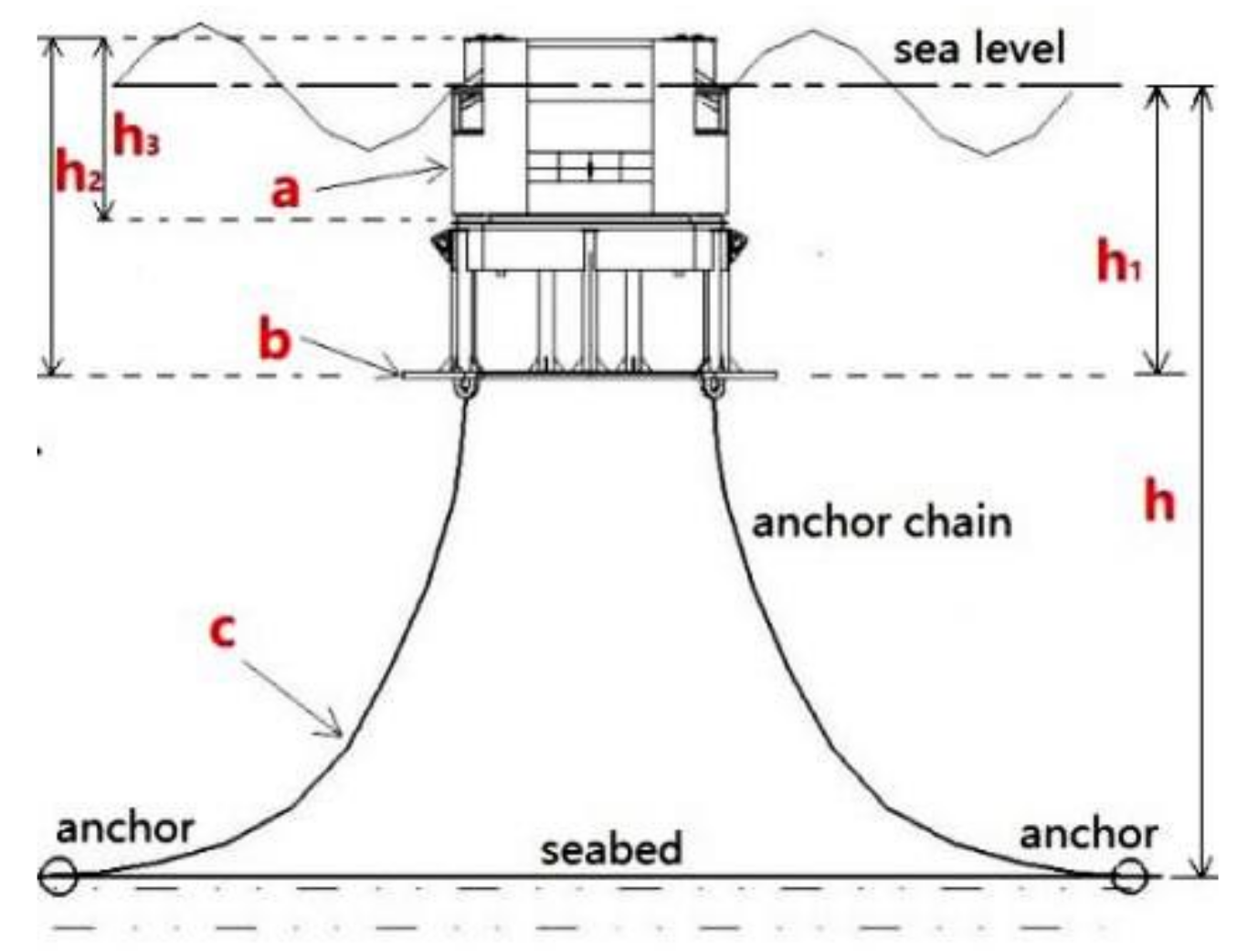
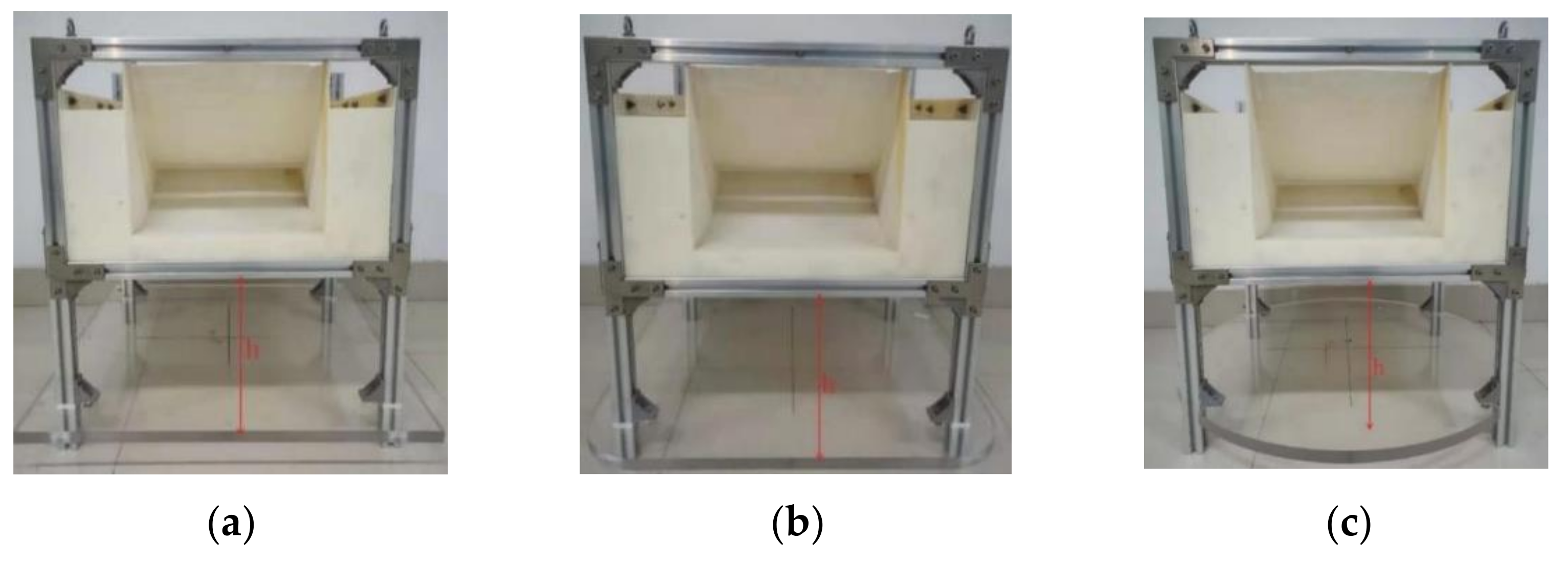
2. Structure and Power Generation Principle
3. Motion Simulation
3.1. Horizontal Movement Analysis
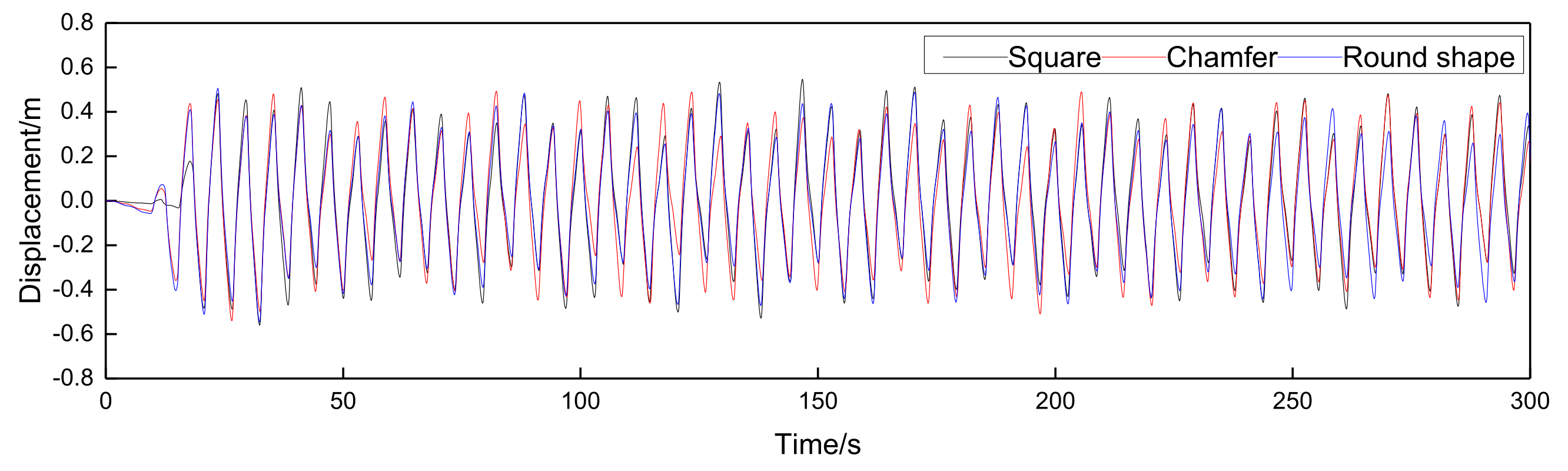
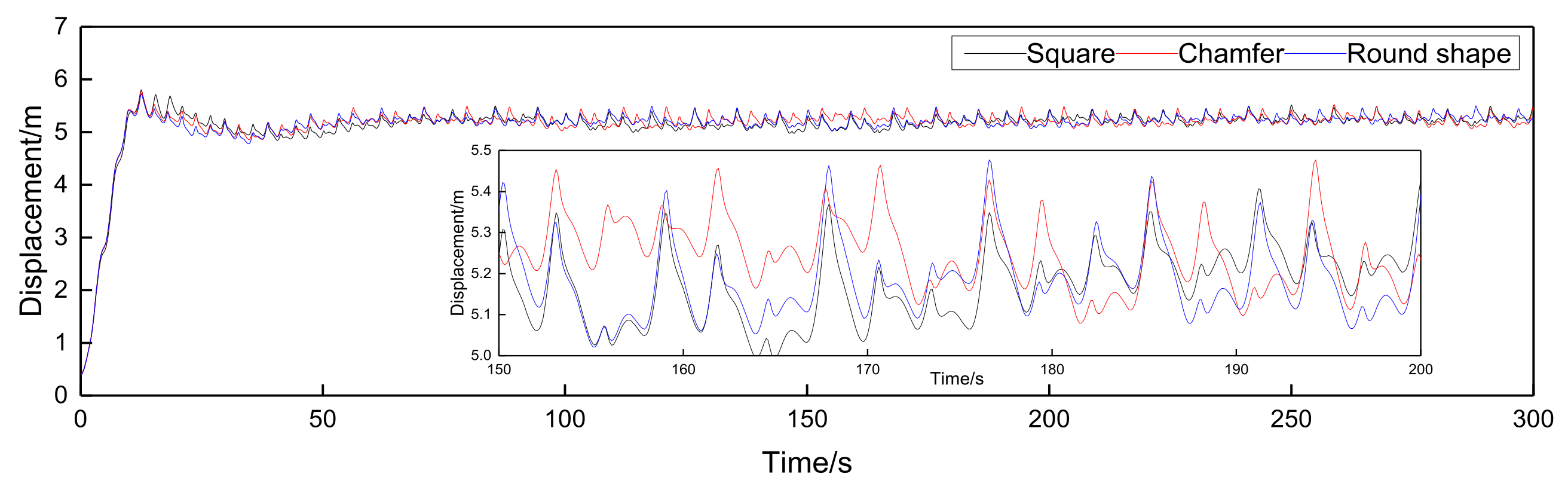
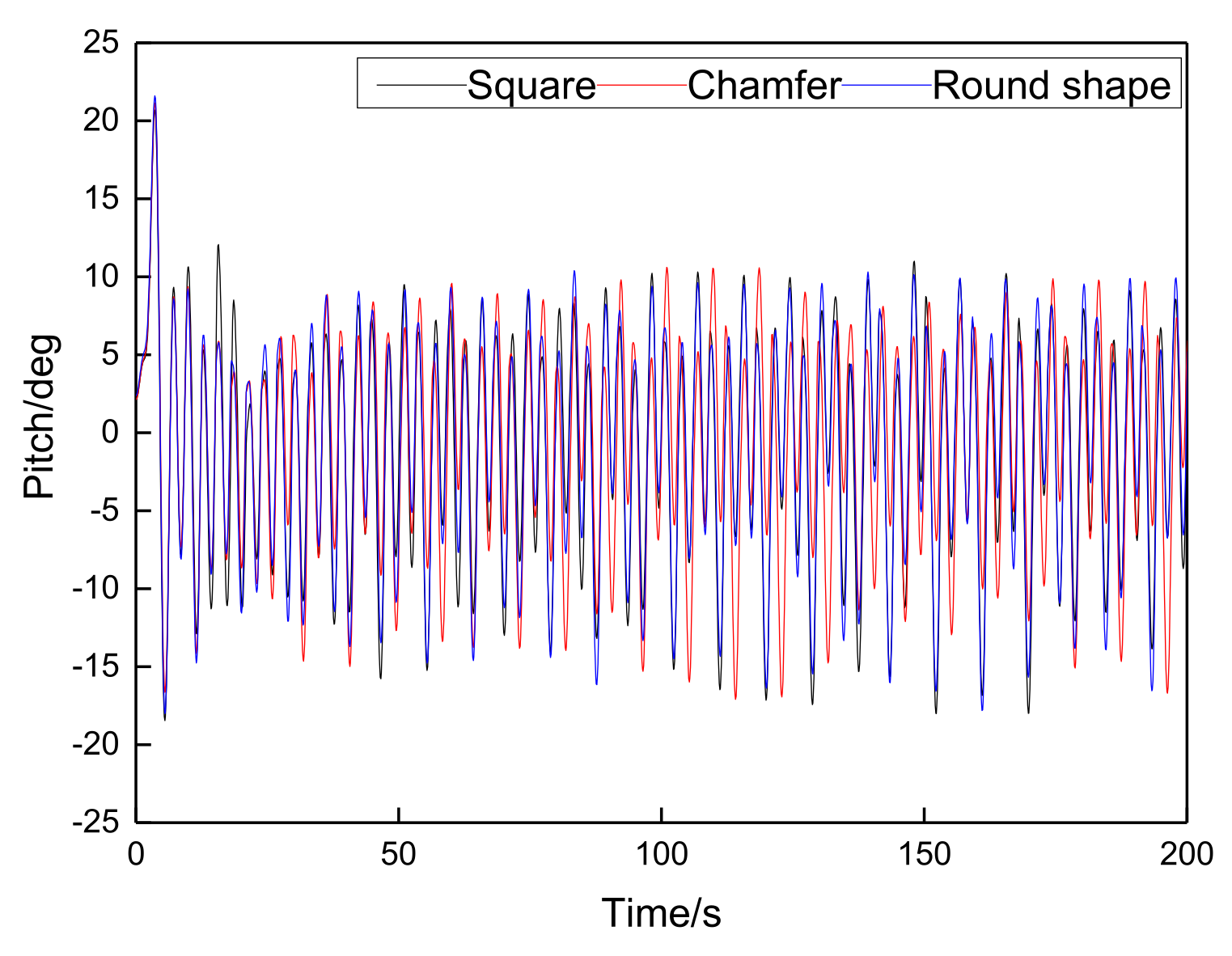
3.2. Heave and Pitch Motion Analysis
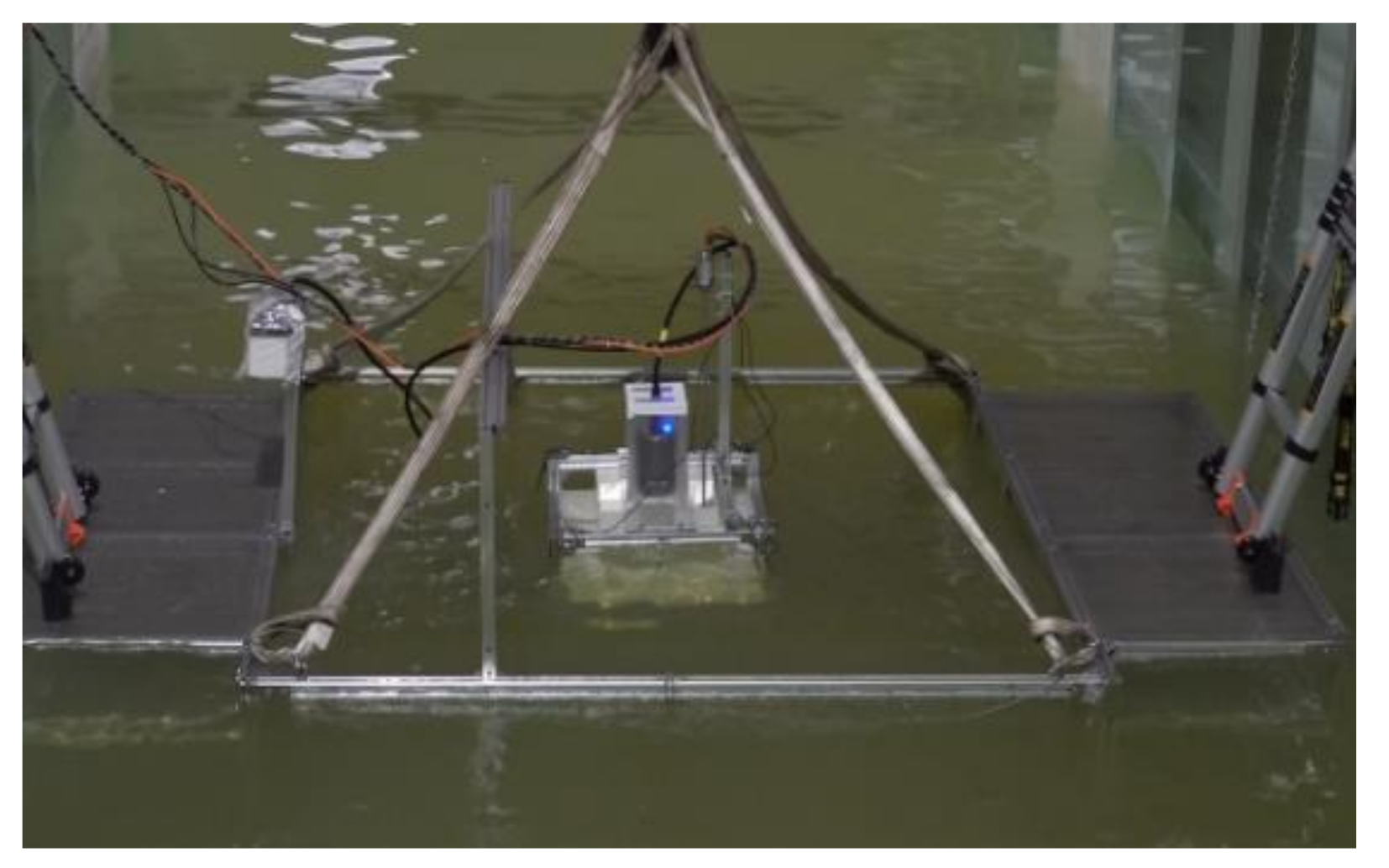
4. Regular Wave Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, F.; Di, H. Analysis of the Financing Structure of China’s Listed New Energy Companies under the Goal of Peak CO2 Emissions and Carbon Neutrality. Energies 2021, 14, 5636. [Google Scholar] [CrossRef]
- Wang, Q.; Xu, X. Research on development path of modern coal chemical industry under background of “emission peak” and “carbon neutrality”. Mod. Chem. Ind. 2021, 41, 1–3. [Google Scholar]
- Fang, K.; Li, C.; Tang, Y.; He, J.; Song, J. China’s pathways to peak carbon emissions: New insights from various industrial sectors. Appl. Energy 2021, 306, 118039. [Google Scholar] [CrossRef]
- Cui, X.; Shaojun, E.; Niu, D.; Wang, D.; Li, M. An Improved Forecasting Method and Application of China’s Energy Consumption under the Carbon Peak Target. Sustainability 2021, 13, 8670. [Google Scholar] [CrossRef]
- Wang, F.; Gao, C.; Zhang, W.; Huang, D. Industrial Structure Optimization and Low-Carbon Transformation of Chinese Industry Based on the Forcing Mechanism of CO2 Emission Peak Target. Sustainability 2021, 13, 4417. [Google Scholar] [CrossRef]
- Li, Q.; Yu, W.; Zhao, J. Key Technologies for the Safe Operation of Wind and Solar Power Generation Equipment in Support of the Peak CO2 Emissions and Carbon Neutrality Policy. High Volt. Eng. 2021, 47, 3047–3060. [Google Scholar]
- VanZwieten, J.H.; Rauchenstein, L.T.; Lee, L. An assessment of Florida’s ocean thermal energy conversion (OTEC) resource. Renew. Sustain. Energy Rev. 2017, 75, 683–691. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, H.; Wang, C.; Tay, Z.; Luong, V. Wave energy converter and large floating platform integration: A review. Ocean Eng. 2020, 213, 107768. [Google Scholar] [CrossRef]
- Guillou, N.; Lavidas, G.; Chapalain, G. Wave Energy Resource Assessment for Exploitation—A Review. J. Mar. Sci. Eng. 2020, 8, 705. [Google Scholar] [CrossRef]
- Nilsson, E.; Rutgersson, A.; Dingwell, A.; Björkqvist, J.-V.; Pettersson, H.; Axell, L.; Nyberg, J.; Strömstedt, E. Characteriza-tion of Wave Energy Potential for the Baltic Sea with Focus on the Swedish Exclusive Economic Zone. Energies 2019, 12, 793. [Google Scholar] [CrossRef] [Green Version]
- Farkas, A.; Degiuli, N.; Martić, I. Assessment of Offshore Wave Energy Potential in the Croatian Part of the Adriatic Sea and Comparison with Wind Energy Potential. Energies 2019, 12, 2357. [Google Scholar] [CrossRef] [Green Version]
- O’Connell, R.; de Montera, L.; Peters, J.L.; Horion, S. An updated assessment of Ireland’s wave energy resource using satellite data assimilation and a revised wave period ratio. Renew. Energy 2020, 160, 1431–1444. [Google Scholar] [CrossRef]
- Waters, S.; Aggidis, G. Tidal range technologies and state of the art in review. Renew. Sustain. Energy Rev. 2016, 59, 514–529. [Google Scholar] [CrossRef] [Green Version]
- Cheung, N.; Cross, P. Numerical wave modeling for operational and survival analyses of wave energy converters at the US Navy Wave Energy Test Site in Hawaii. Renew. Energies 2020, 161, 240–256. [Google Scholar]
- Vieira, F.; Cavalcante, G.; Campos, E.; Taveira-Pinto, F. Wave energy flux variability and trend along the United Arab Emirates coastline based on a 40-year hindcast. Renew. Energy 2020, 160, 1194–1205. [Google Scholar] [CrossRef]
- Reddy, K.; Prajwal, K.; Satwik, T.S. A Review on the Gradiation Towards Pelamis Wave Energy Converter. In Proceedings of the 2020 4th International Conference on Trends in Electronics and Informatics (ICOEI) (48184), Tirunelveli, India, 15–17 June 2020; pp. 130–136. [Google Scholar] [CrossRef]
- Zabala, I.; Henriques, J.; Blanco, J.M.; Gomez, A.; Gato, L.; Bidaguren, I.; Falcão, A.; Amezaga, A.; Gomes, R. Wave-induced real-fluid effects in marine energy converters: Review and application to OWC devices. Renew. Sustain. Energy Rev. 2019, 111, 535–549. [Google Scholar] [CrossRef]
- Mavrakos, A.S.; Konispoliatis, D.N.; Ntouras, D.G.; Papadakis, G.P.; Mavrakos, S.A. Hydrodynamics of Moonpool-Type Floaters: A Theoretical and a CFD Formulation. Energies 2022, 15, 570. [Google Scholar] [CrossRef]
- Li, Y.; Pan, D.-Z. The ebb and flow of tidal barrage development in Zhejiang Province, China. Renew. Sustain. Energy Rev. 2017, 80, 380–389. [Google Scholar] [CrossRef]
- Wang, X.; Jia, N.; Xue, C.; Wang, J.; Ma, C. Thoughts on the Industrial Development of my country’s Marine Renewable En-ergy. Ocean Dev. Manag. 2019, 36, 14–18. [Google Scholar]
- Liu, W.; Liu, L.; Chen, F.; Ma, C.; Ge, Z.; Peng, J. China’s Marine Renewable Energy Technology Progress. Sci. Technol. Rev. 2020, 38, 27–39. [Google Scholar]
- Peng, C. A Preliminary Study on the Sustainable Development of my country’s Islands. Ph.D. Thesis, Ocean University of China, Qingdao, China, 2006. [Google Scholar]
- Qiu, S.; Liu, K.; Wang, D.; Ye, J.; Liang, F. A comprehensive review of ocean wave energy research and development in China. Renew. Sustain. Energy Rev. 2019, 113, 109271. [Google Scholar] [CrossRef]
- Doyle, S.; Aggidis, G.A. Development of multi-oscillating water columns as wave energy converters. Renew. Sustain. Energy Rev. 2019, 107, 75–86. [Google Scholar] [CrossRef] [Green Version]
- Feng, F.; Ning, G.; Huang, L.; Fang, B. Research on the Development and Utilization of Wave Energy in the South China Sea Islands. Eng. Technol. Res. 2020, 5, 216–217. [Google Scholar]
- Wan, Y.; Fan, C.; Dai, Y.; Li, L.; Sun, W.; Zhou, P.; Qu, X. Assessment of the Joint Development Potential of Wave and Wind Energy in the South China Sea. Energies 2018, 11, 398. [Google Scholar] [CrossRef] [Green Version]
- Aderinto, T.; Li, H. Ocean Wave Energy Converters: Status and Challenges. Energies 2018, 11, 1250. [Google Scholar] [CrossRef] [Green Version]
- Roy, A.; Auger, F.; Dupriez-Robin, F.; Bourguet, S.; Tran, Q.T. Electrical Power Supply of Remote Maritime Areas: A Review of Hybrid Systems Based on Marine Renewable Energies. Energies 2018, 11, 1904. [Google Scholar] [CrossRef] [Green Version]
- Hou, J.; Zhu, X.; Liu, P. Current situation and future projection of marine renewable energy in China. Int. J. Energy Res. 2018, 43, 662–680. [Google Scholar] [CrossRef]
- Wang, Z.; Dong, S.; Li, X.; Soares, C.G. Assessments of wave energy in the Bohai Sea, China. Renew. Energy 2016, 90, 145–156. [Google Scholar] [CrossRef]
- Wan, Y.; Fan, C.; Dai, Y.; Li, L.; Sun, W.; Zhou, P. Study on the development potential of wave energy in the coastal waters around Shandong Peninsula. Acta Energy Sol. Sin. 2018, 39, 3311–3318. [Google Scholar]
- Liu, S. Assessment of Wave Energy Resources in the Sea Area Around Shandong Province. Acta Oceanol. Sin. 2015, 37, 108–122. [Google Scholar]
- Han, L.; Wang, J.; Gao, J.; Wang, X.; Wu, H. Analysis of Wave Energy Resources in the Northern Sea of Chu Island, Shan-dong. Acta Energy Sol. Sin. 2020, 41, 165–171. [Google Scholar]
- Li, D. Numerical Evaluation of Wind Energy and Wave Energy Resources in the Blue and Yellow Regions of Shandong Pen-insula. Master’s Thesis, Ocean University of China, Qingdao, China, 2015. [Google Scholar]
- NCNA. China plans to build three Marine energy test sites. Power Syst. Autom. 2015, 39, 158. [Google Scholar]
- Wang, B.; Xu, Z.; Li, C.; Wang, D.; Ding, Q. Hydrodynamic characteristics of forced oscillation of heave plate with fractal characteristics based on floating wind turbine platform. Ocean Eng. 2020, 212, 107621. [Google Scholar] [CrossRef]
- Thiagarajan, K.; Moreno, J. Wave Induced Effects on the Hydrodynamic Coefficients of an Oscillating Heave Plate in Off-Shore Wind Turbines. J. Mar. Sci. Eng. 2020, 8, 622. [Google Scholar] [CrossRef]
- Stansby, P.; Moreno, E.C.; Apsley, D.; Stallard, T. Slack-moored semi-submersible wind floater with damping plates in waves: Linear diffraction modelling with mean forces and experiments. J. Fluids Struct. 2019, 90, 410–431. [Google Scholar] [CrossRef]
- Jang, H.; Park, S.; Kim, M.; Kim, K.; Hong, K. Effects of heave plates on the global performance of a multi-unit floating off-shore wind turbine. Renew. Energ. 2019, 134, 526–537. [Google Scholar] [CrossRef]
- Ma, R.; Bi, K.; Hao, H. Using inerter-based control device to mitigate heave and pitch motions of semi-submersible platform in the shallow sea. Eng. Struct. 2020, 207, 110248. [Google Scholar] [CrossRef]
- Ma, R.; Bi, K.; Hao, H. Heave motion mitigation of semi-submersible platform using inerter-based vibration isolation system (IVIS). Eng. Struct. 2020, 219, 110833. [Google Scholar] [CrossRef]
- Ma, R.; Bi, K.; Hao, H. Mitigation of heave response of semi-submersible platform (SSP) using tuned heave plate inerter (THPI). Eng. Struct. 2018, 177, 357–373. [Google Scholar] [CrossRef]
- Bae, Y.; Kim, M.; Kim, H. Performance changes of a floating offshore wind turbine with broken mooring line. Renew. Energy 2016, 101, 364–375. [Google Scholar] [CrossRef]
- Liu, J. Hydrodynamic Analysis and Design of Heave Damping Plate. Master’s Thesis, Shandong University, Jinan, China, 2014. [Google Scholar]
- Guo, X. Theory and Practice of Double Double Turbine Wave Power Generation Device; China Water Resources and Hydropower Press: Beijing, China, 2017; pp. 23–25. [Google Scholar]
- Guo, X.; Tan, S.; Wu, Y. Study on the Wave Capture Device in the Flow Channel of a Double Double Turbine. J. Ocean Technol. 2014, 33, 17–24. [Google Scholar]
- Guo, X.; Wu, Y. Power Bandwidth Design Method for Direct Drive Hydraulic Turbine Wave Energy Utilization Device. J. Hydrog. Eng. 2013, 32, 197–203. [Google Scholar]
- Meng, Z.; Liu, Y.; Qin, J.; Sun, S. Mooring Angle Study of a Horizontal Rotor Wave Energy Converter. Energies 2021, 14, 344. [Google Scholar] [CrossRef]
- Meng, Z.; Liu, Y.; Qin, J.; Chen, Y. Mathematical Modeling and Experimental Verification of a New Wave Energy Converter. Energies 2020, 14, 177. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device Parameter | Engineering Prototype | Model Prototype | Unit |
|---|---|---|---|
| Device total height (h2) | 5443 | 544 | mm |
| Length of generating part | 6000 | 600 | mm |
| Width of generating part | 4412 | 441 | mm |
| Height of generating part (h3) | 2948 | 295 | mm |
| Mass | 280,000 | 28.0 | kg |
| Experiment Condition | Prototype Value | Model Value | ||
|---|---|---|---|---|
| Parameter | Significant wave height (m) | Significant wave Period (s) | Regular Wave height H (m) | Regular wave period T (s) |
| Case | 0.9 | 3.6 | 0.09 | 1.15 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, Z.; Chen, Y.; Li, S. The Shape Optimization and Experimental Research of Heave Plate Applied to the New Wave Energy Converter. Energies 2022, 15, 1313. https://doi.org/10.3390/en15041313
Meng Z, Chen Y, Li S. The Shape Optimization and Experimental Research of Heave Plate Applied to the New Wave Energy Converter. Energies. 2022; 15(4):1313. https://doi.org/10.3390/en15041313
Chicago/Turabian StyleMeng, Zhongliang, Yun Chen, and Shizhen Li. 2022. "The Shape Optimization and Experimental Research of Heave Plate Applied to the New Wave Energy Converter" Energies 15, no. 4: 1313. https://doi.org/10.3390/en15041313
APA StyleMeng, Z., Chen, Y., & Li, S. (2022). The Shape Optimization and Experimental Research of Heave Plate Applied to the New Wave Energy Converter. Energies, 15(4), 1313. https://doi.org/10.3390/en15041313