
Development and Validation of V2G Technology for Electric Vehicle Chargers Using Combo CCS Type 2 Connector Standards

 ,
,  ,
,  and
and 
Abstract
1. Introduction
- DC chargers are bigger and faster than AC chargers.
- All power conversion (AC/DC and/or DC/DC) occurs outside of the car. So, there are no power converters for DC charging inside the car. The charging current goes directly to the battery from the DC charger.
- The electric vehicle that accepts DC charging can fast recharge while traveling a long distance.
- Working with AC at high voltages is more dangerous than working with DC.
- Most parking spaces where a car will be parked for a longer period of time are ideal for AC charging.
- The installation of an AC charging station is less expensive than DC.
- An inductor or conductor can be used to lower the current without experiencing a significant energy loss because the current magnitude is not constant.
- Rectifiers make it simple to convert AC electricity to DC.
- A transformer may be used to produce a broad range of voltages.
- When AC is delivered at higher voltages over larger city distances, the line losses are less in comparison to a DC transmission.
2. EV Charging Connector and Communication Standard Background
2.1. AC Charging Connector
2.2. DC Charging Connector
2.3. Combined Charger Connector (J1772-2009 Combo)
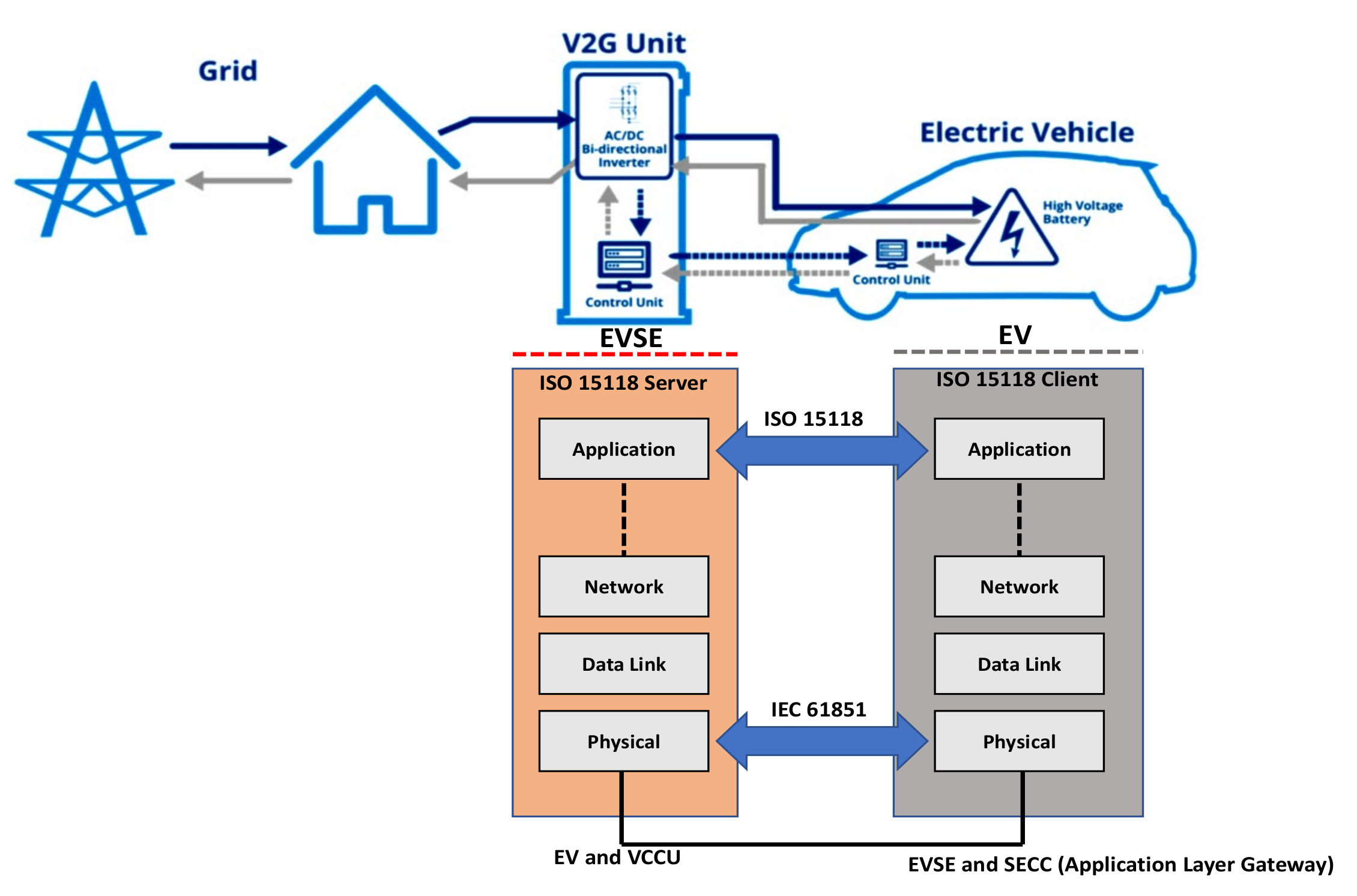
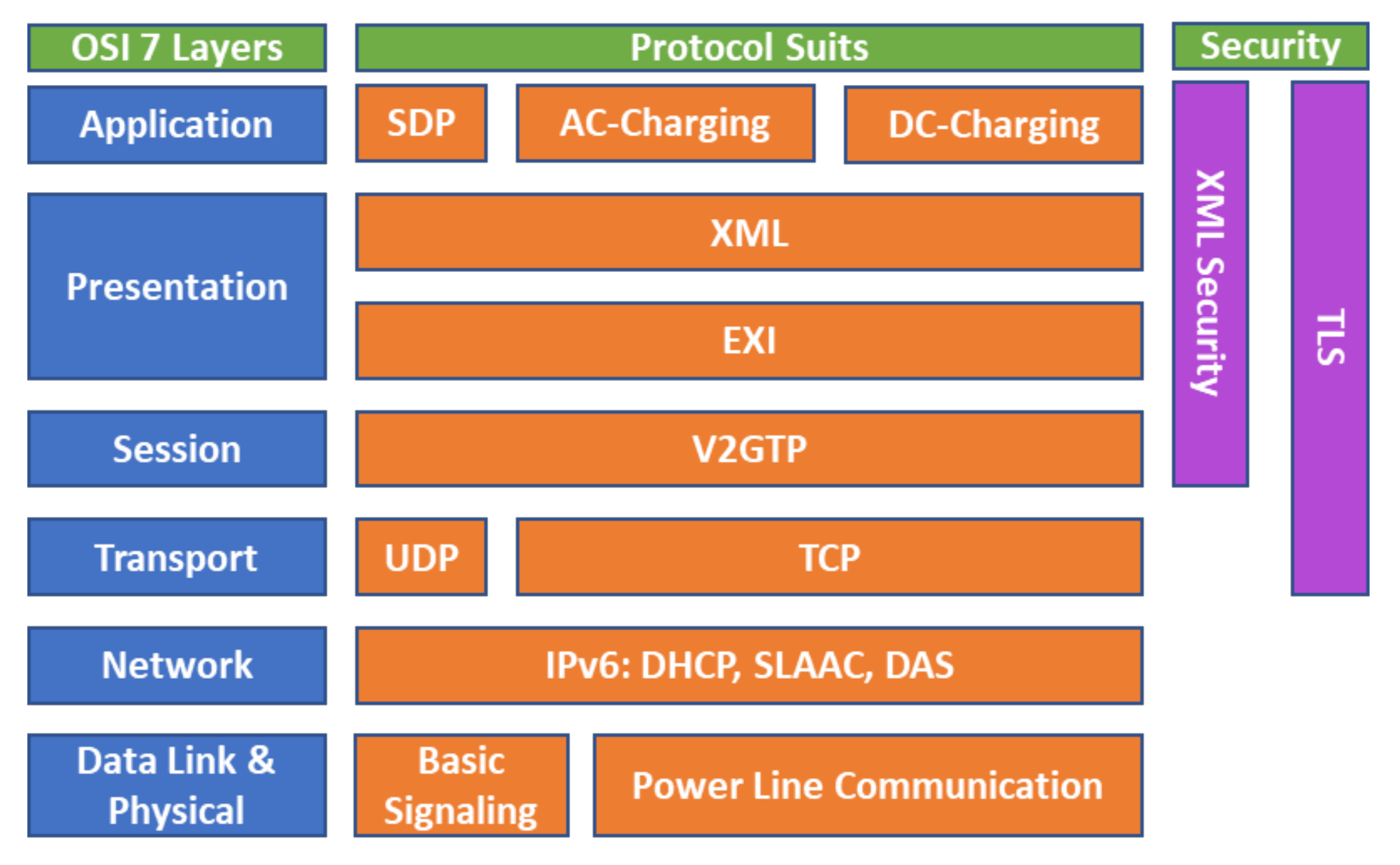
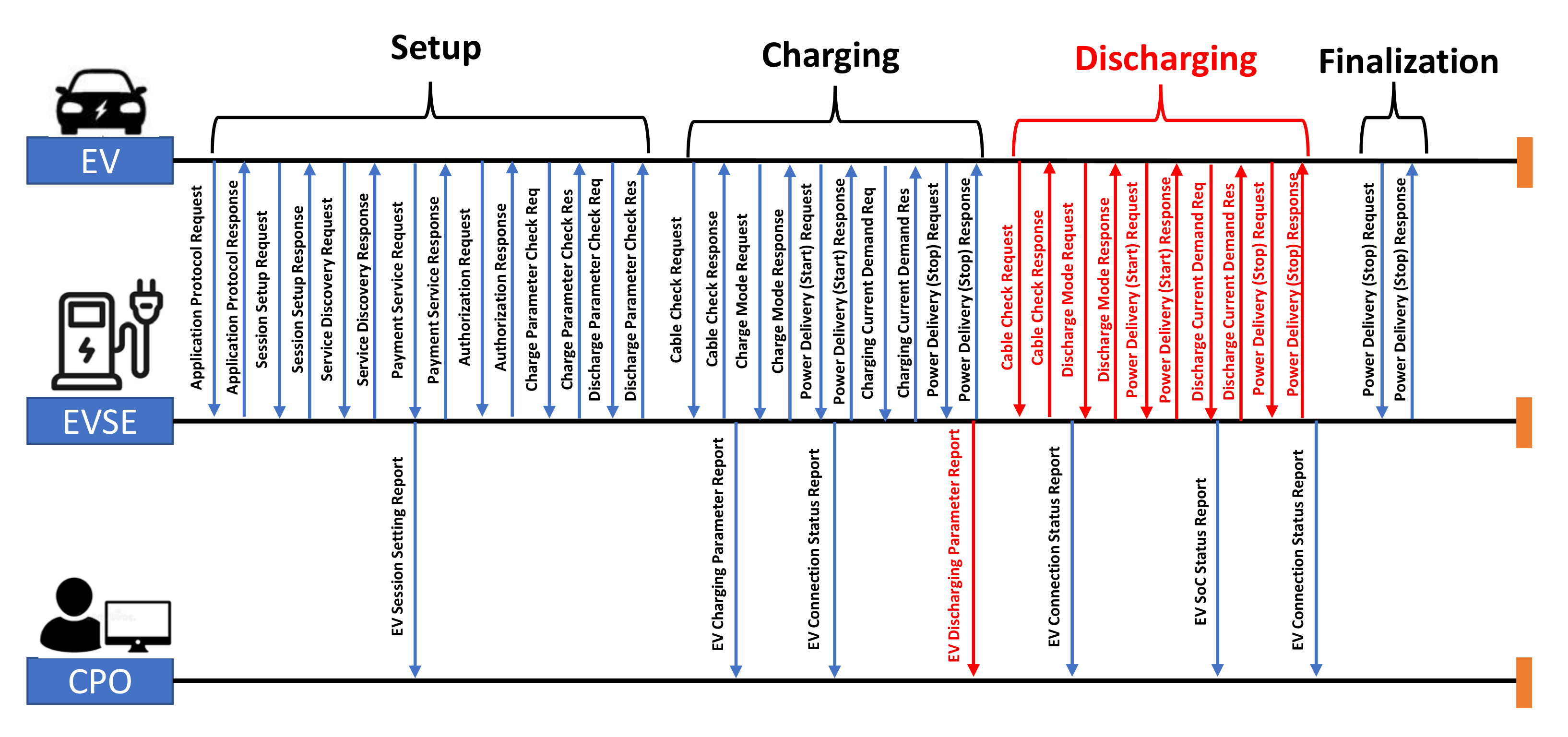
2.4. EV Charging and V2G Communication Standards
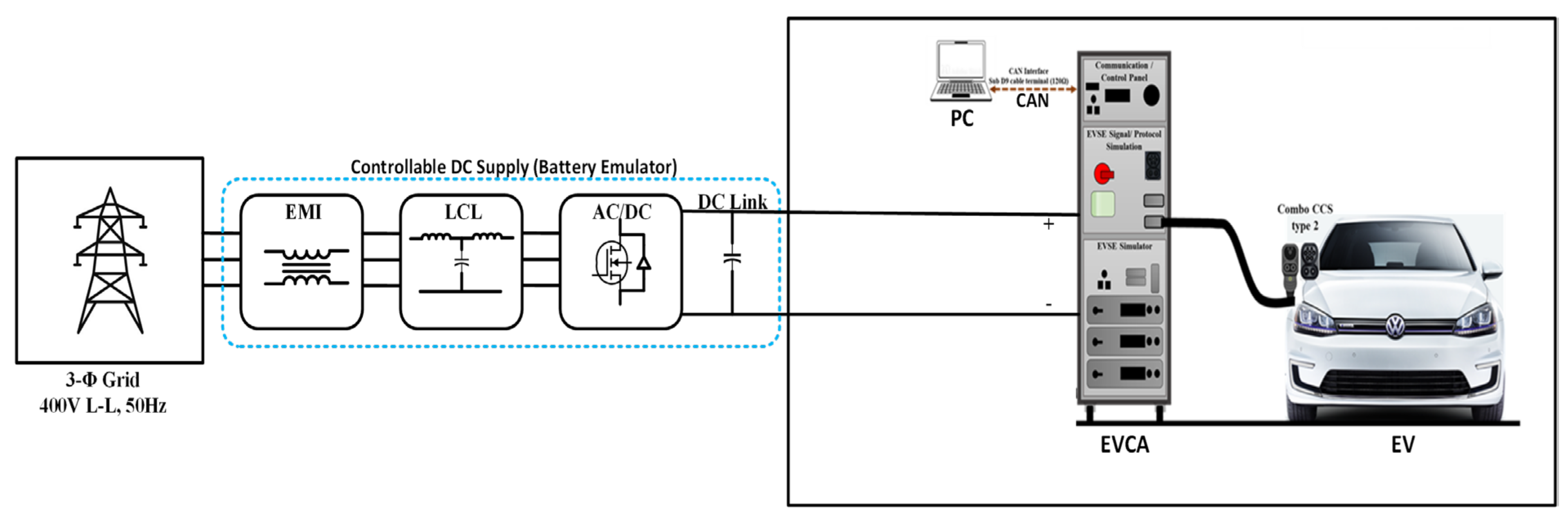
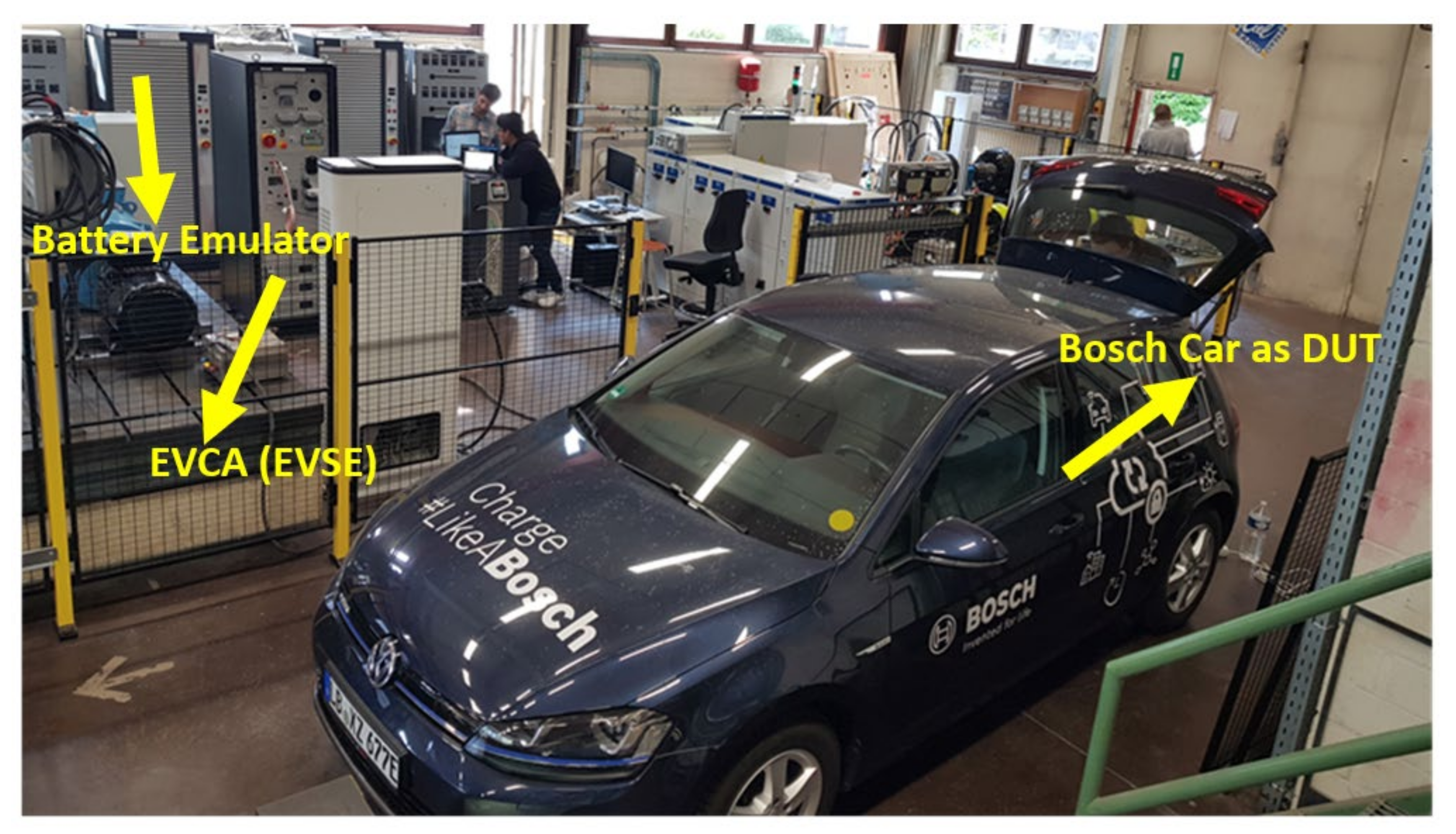
3. Test System Development
3.1. Controllable DC Supply/Load (Battery Emulator)
- Per module: max. 1000 V with energy recovery.
- Power up to 30 kW, and 150 kW by connecting two modules in parallel.
- CAN interface.
- Power monitoring module with redundant power contactors.
3.2. Electric Vehicle Charging Analyzer (EVCA)
- Data recording and controlling on CAN interface as “Remote Control”.
- Isolated banana sockets for control pilot of EVSE for comparison with an oscilloscope.
- Integrated electronics for measuring Voltage up to 800 V and Current up to 200 A.
- Integrated high-power resistors for isolation test with ca. 100 mA leakage current at 500 V DC.
3.3. Electric Vehicle DUT (BOSCH)
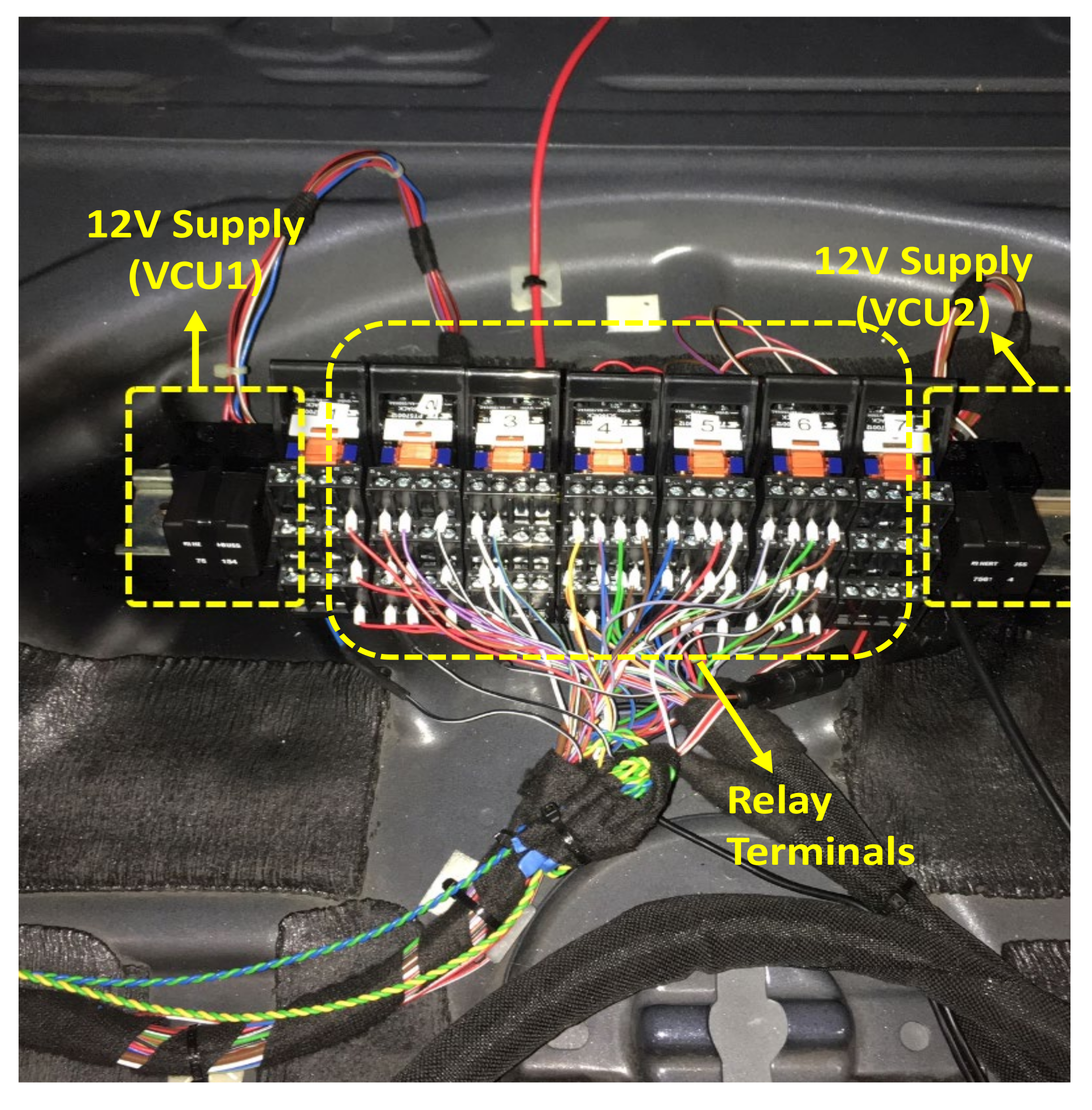
3.4. Additional EV Hardware Modification for V2G
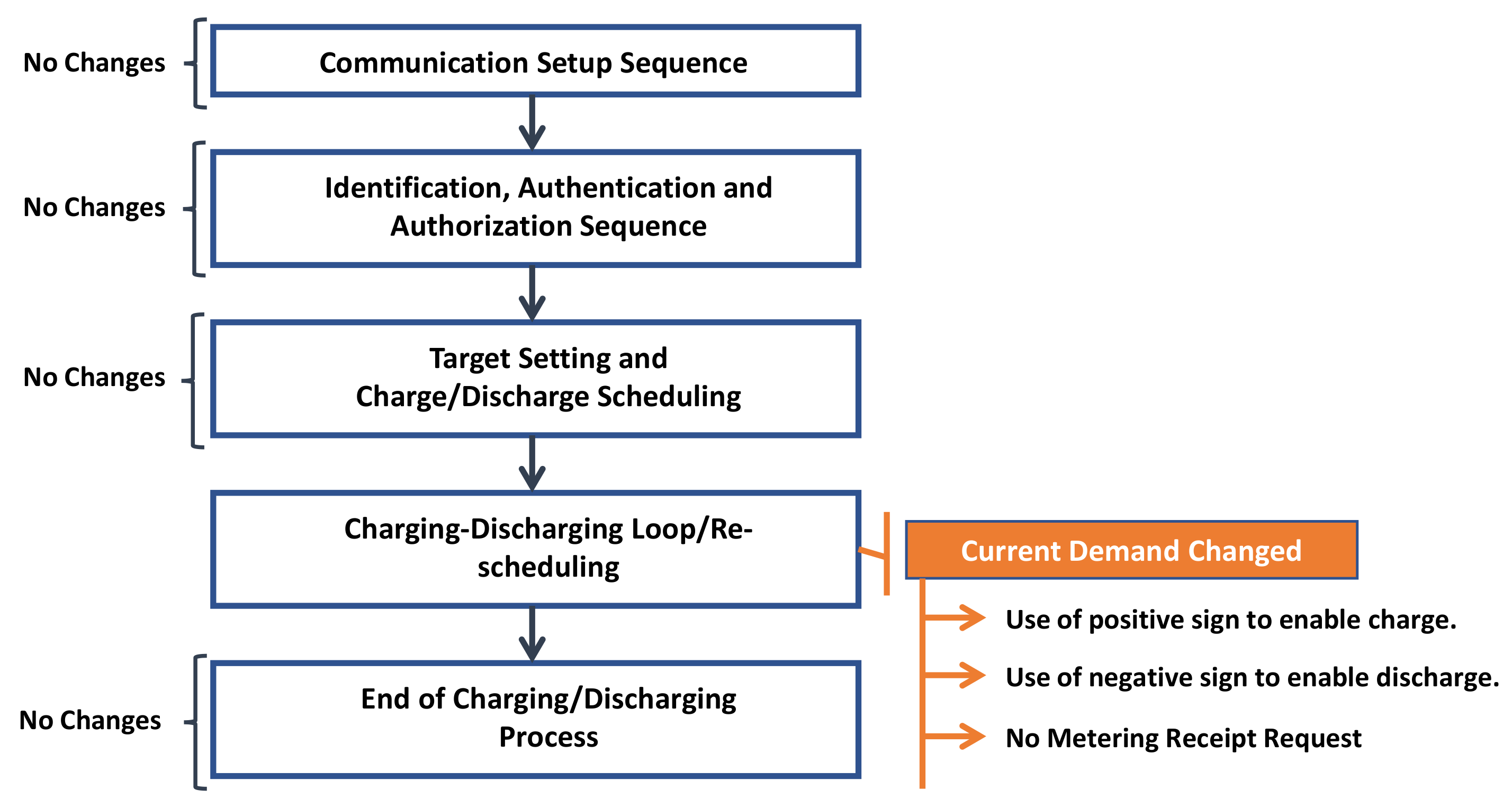
3.5. Software Modification for V2G in EV
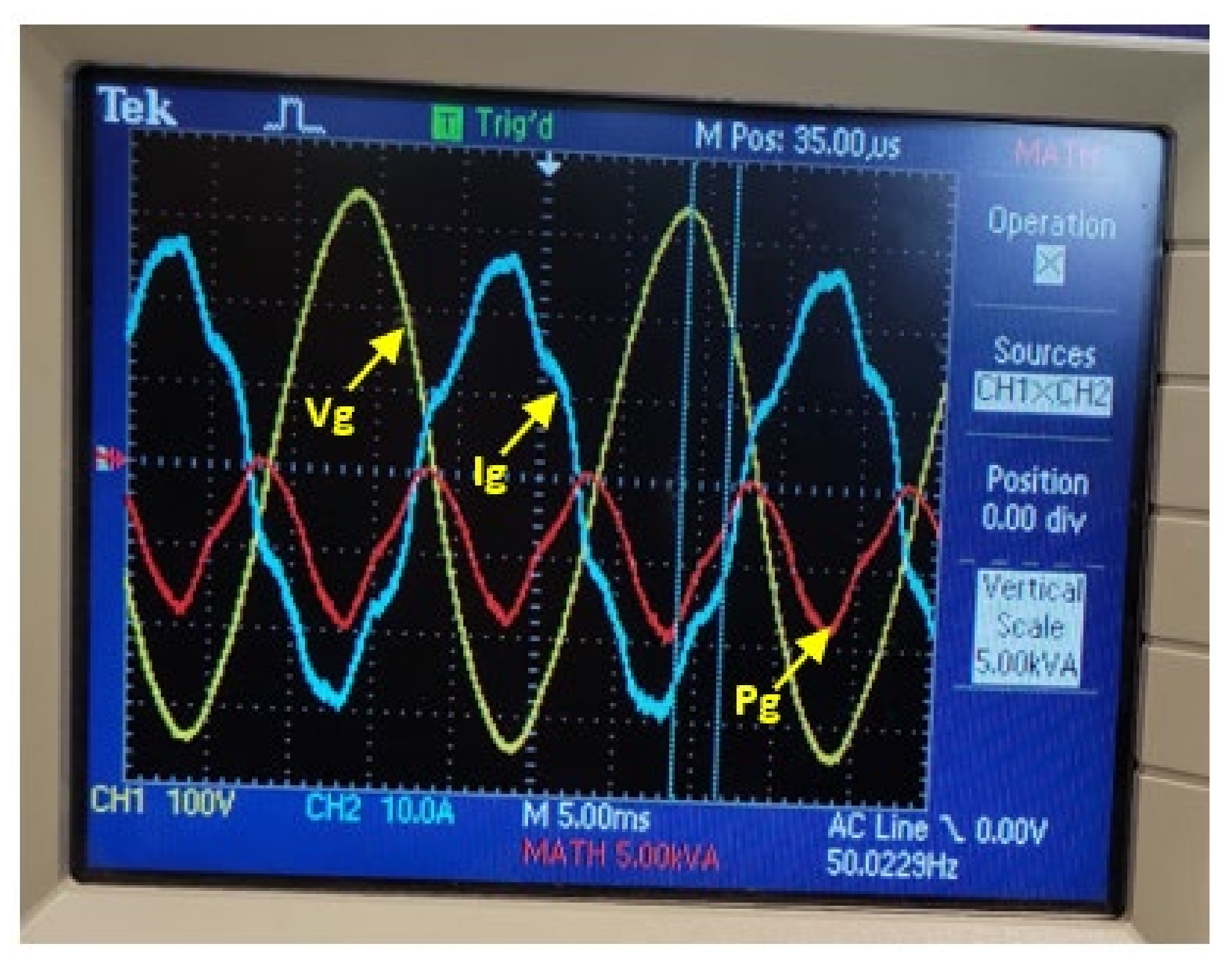
4. Testing Results and Discussions
5. Data-Driven V2G Charger Model Development
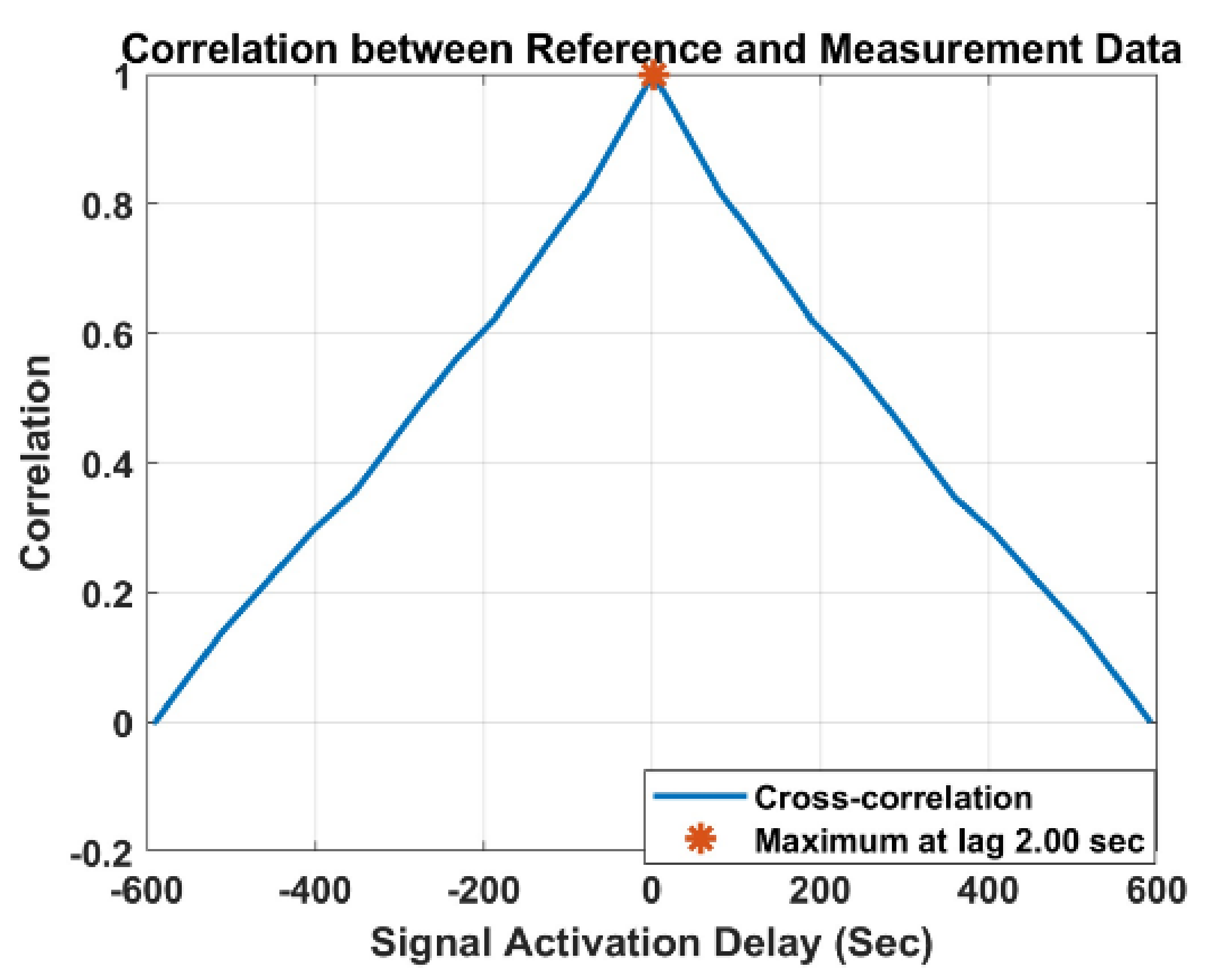
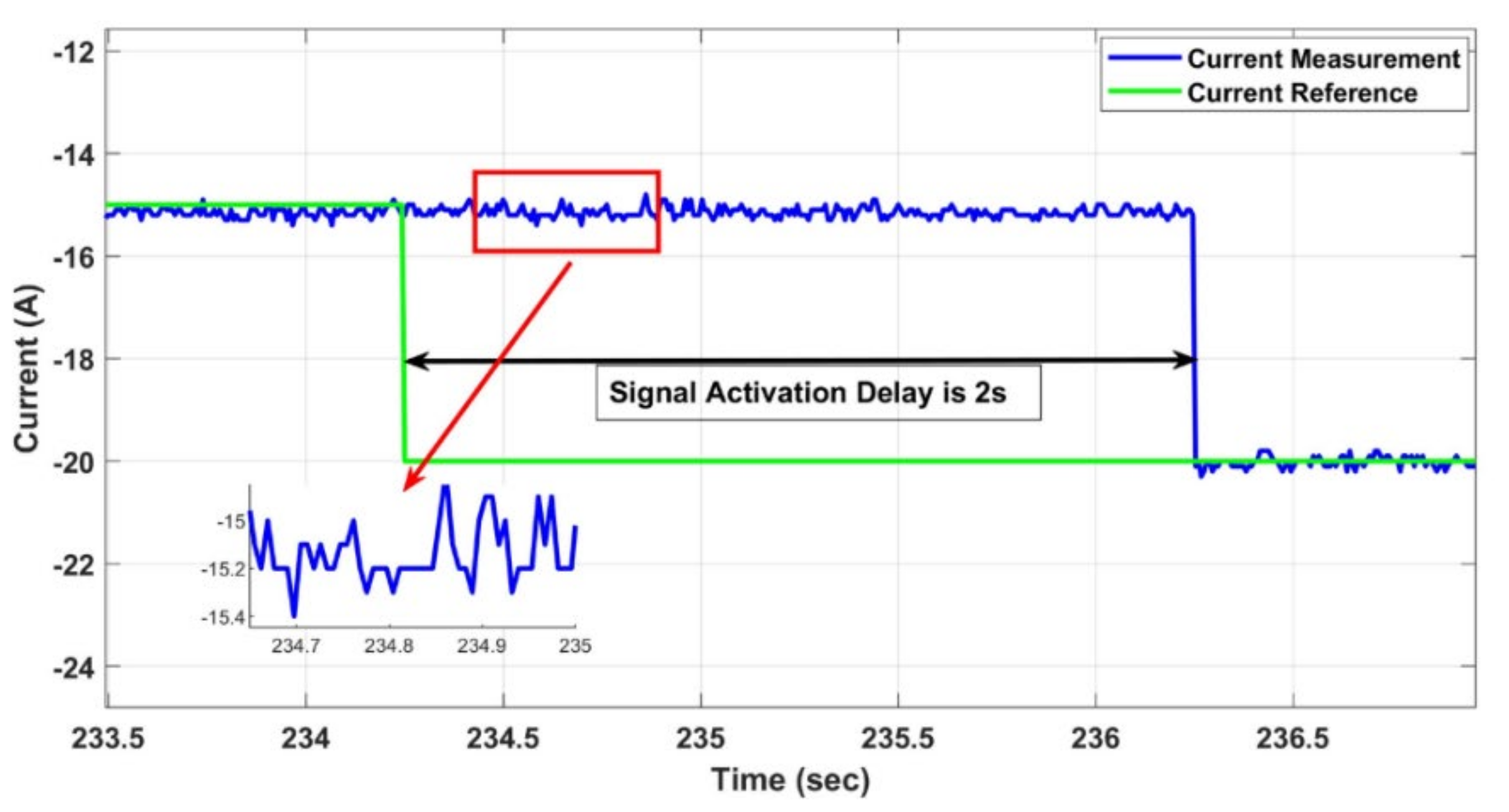
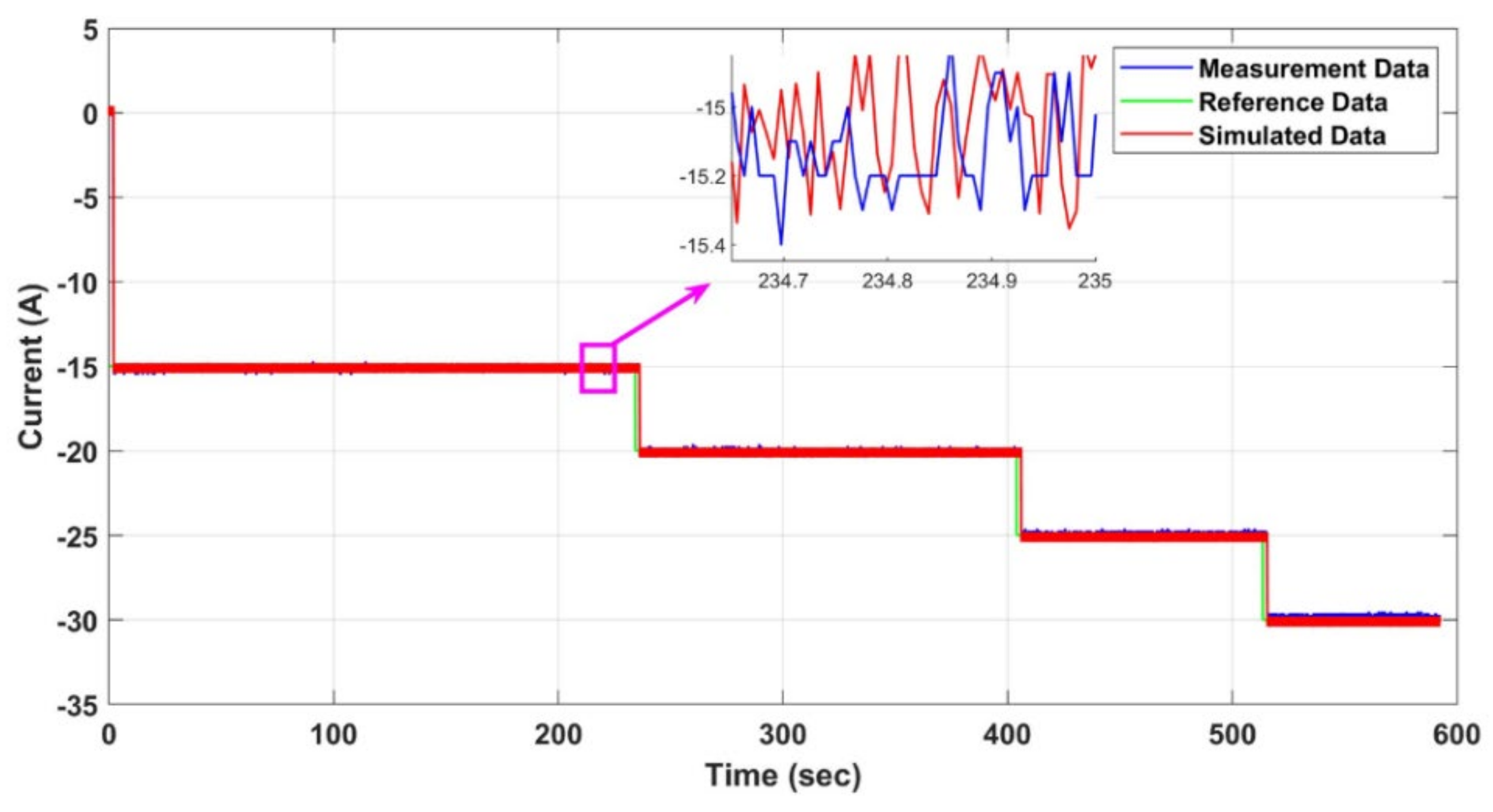
- The response time is modeled as a transport delay, which is equal to 2 sec for the local control, which is shown in Figure 19.
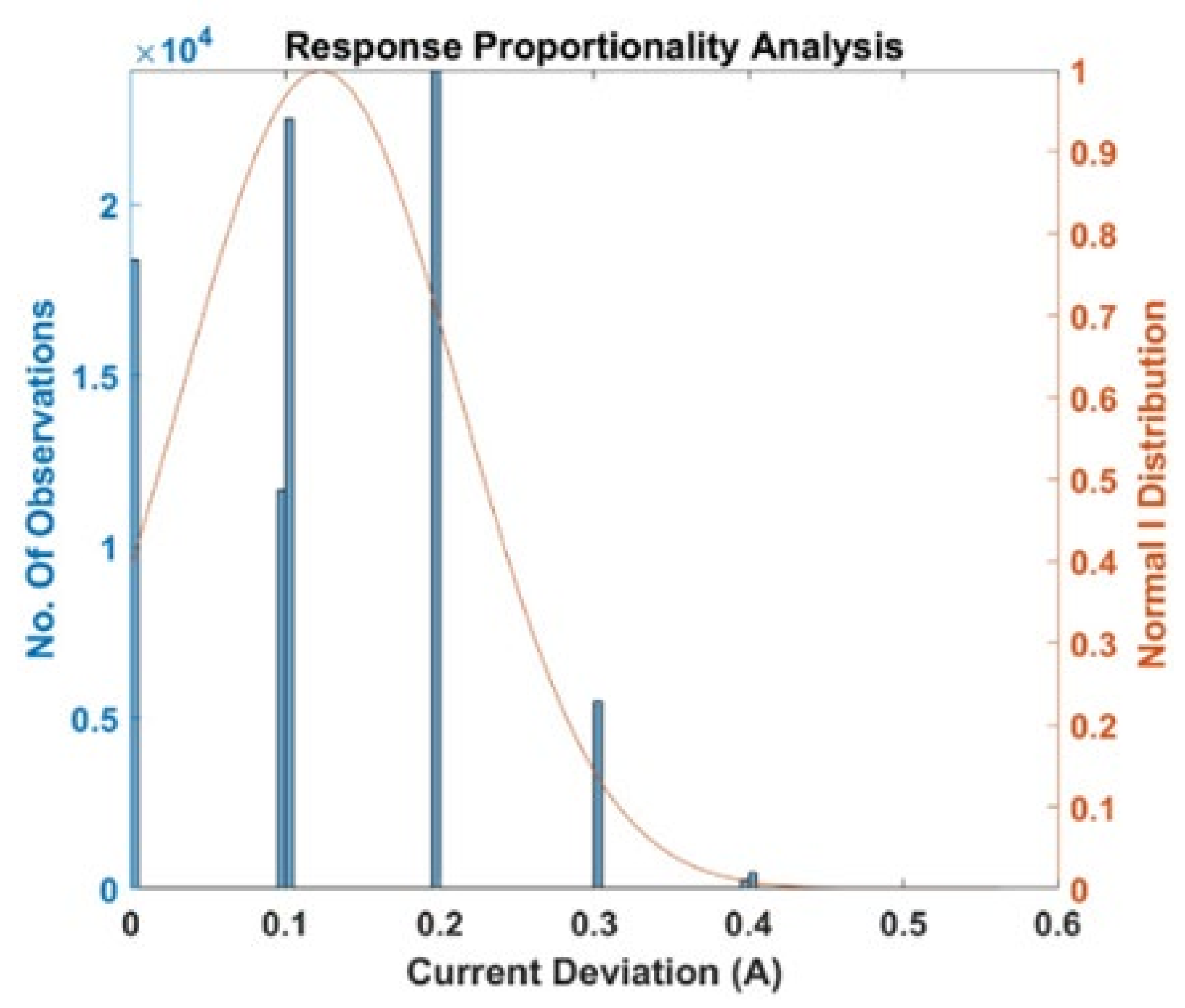
- The setpoint proportionality is obtained by implementing Equation (1)
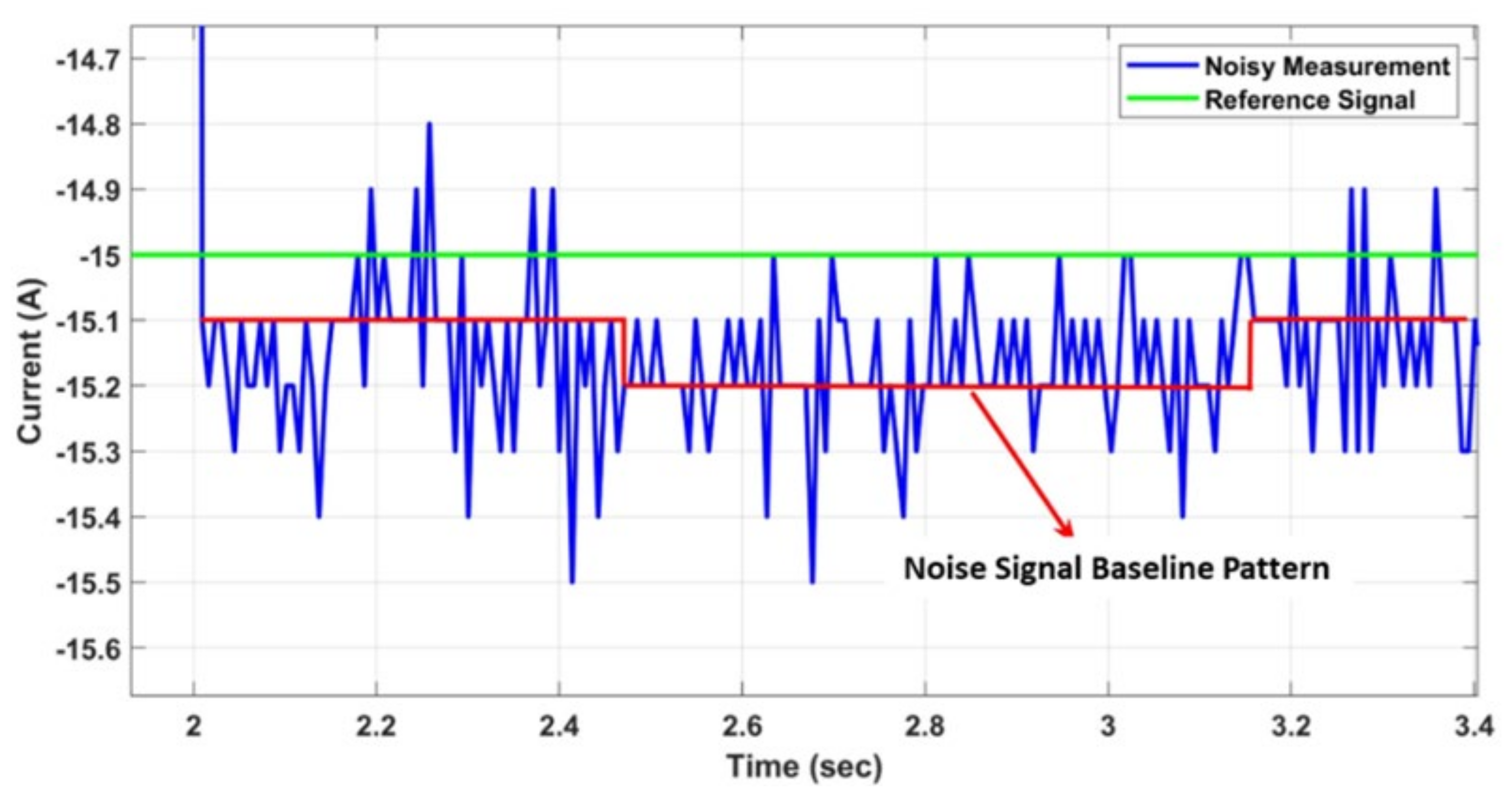
- The relevant mean accuracy value, i.e., 0.2 A for a negative setpoint, is added to the current data points to perform the amplitude approximation. The implementation is obtained according to Equation (2):
- By including a uniformly distributed noise into the computed setpoint, the noise precision is accomplished. For a set-point ≠ 0, the noise typically has an amplitude of 0.3 A and 0.4 A. Equation (3) is used to determine the implementation.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ACES | Adaptive Control of Energy Storage |
| ADR | Automatic Demand Response |
| CAN | Controller Area Network |
| CCS | Combined Charging Service |
| CHAdeMO | CHARGE de MOVE |
| CPO | Charge Point Operator |
| DAS | Direct-Attached Storage |
| DHCP | Dynamic Host Configuration Protocol |
| DUT | Device Under Test |
| EVCA | Electric Vehicle Charging Analyzer |
| EVCC | Electric Vehicle Communication Controller |
| EVSE | Electric Vehicle Supply Equipment |
| EXI | Efficient XML Interchange |
| FCR | Frequency Containment Reserves |
| G2V | Grid-to-Vehicle |
| GB/T | Guojia Biaozhun/Tuijian (China) |
| IEC | International Electromechanical Commission |
| IEEE | Institute of Electrical and Electronic Engineers |
| ISO | International Organization of Standardization |
| JARI | Japan Automotive Research Institute |
| JEVS | Japan Electric Vehicle Standard |
| JEVS | Japan Electric Vehicle Standard |
| OCPP | Open Charge Point Protocol |
| OEM | Original Equipment Manufacturer |
| PLC | Power Line Communication |
| SAE | Society of Automotive Engineers |
| SDP | SECC Discovery Protocol |
| SECC | Supply Equipment Communication Controller |
| SLAAC | Stateless Address Auto-Configuration |
| TCP | Transmission Control Protocol |
| THD | Total Harmonic Distortion |
| TLS | Transport Layer Security |
| UDP | User Datagram Protocol |
| V2G | Vehicle-to-Grid |
| VCU | Vehicle Control Unit |
| XML | Extensible Markup Language |
References
- EPA-United States Environmental Protection Agency. Sources of Greenhouse Gas Emissions. Available online: https://www.epa.gov/ghgemissions/sources-greenhouse-gas-emissions (accessed on 9 July 2022).
- Xiamen Joint Tech Co. Ltd., Ag. Advantages & Disadvantages of DC Charging Compared to AC Charging; Xiamen Joint Tech Co. Ltd., Ag: Xiamen City, China, 2022; Available online: https://www.linkedin.com/pulse/advantages-disadvantages-dc-charging-compared-ac-jointevse (accessed on 13 September 2022).
- Lauinger, D.; Vuille, F.; Kuhn, D. A review of the state of research on vehicle-to-grid (V2G): Progress and barriers to deployment. In Proceedings of the European Battery, Hybrid and Fuel Cell Electric Vehicle Congress, Geneva, Switzerland, 14–16 March 2017; pp. 1–8. [Google Scholar]
- Kempton, W.; Letendre, S.E. Electric vehicles as a new power source for electric utilities. Transp. Res. Part D Transp. Environ. 1997, 2, 157–175. [Google Scholar] [CrossRef]
- Bibak, B.; Tekiner-Moğulkoç, H. A comprehensive analysis of Vehicle to Grid (V2G) systems and scholarly literature on the application of such systems. Renew. Energy Focus 2021, 36, 1–20, ISSN 1755-0084. [Google Scholar] [CrossRef]
- Schmutzler, J.; Andersen, C.A.; Wietfeld, C. Evaluation of OCPP and IEC 61850 for Smart Charging Electric Vehicles. World Electr. Veh. J. 2013, 6, 863–874. [Google Scholar] [CrossRef]
- Bahrami, A. EV Charging Definitions, Modes, Levels, Communication Protocols and Applied Standards, Technical Report. Available online: https://www.researchgate.net/publication/338586995_EV_Charging_Definitions_Modes_Levels_Communication_Protocols_and_Applied_Standards/citations (accessed on 26 August 2022).
- Neaimeh, M.; Andersen, P.B. Mind the gap- open communication protocols for vehicle grid integration. Energy Inform. 2020, 3, 1–17. [Google Scholar] [CrossRef]
- Noel, L.; de Gerardo, Z.R.; Kester, J.; Sovacool, B.K. Vehicle-to-Grid: A Sociotechnical Transition beyond Electric Mobility; Springer: Cham, Switzerland, 2019. [Google Scholar]
- Virta Global. The Two Sides of EV Charging Network Operators. 2019. Available online: https://www.virta.global/blog/emsp-cpo-ev-charging-roles-responsibilities (accessed on 14 July 2022).
- Electric Vehicles, Volkswagen. Electric Vehicles | Volkswagen Newsroom. 2020. Available online: volkswagen-newsroom.com (accessed on 16 July 2022).
- Energy Informatics. Table 2 Protocols for Vehicle Grid Integration. 2020. Available online: https://energyinformaticsspringeropen.com/articles/10.1186/s42162-020-0103-1/tables/2 (accessed on 16 July 2022).
- V2G Global Roadtrip: Around the World in 50 Projects, Innovate UK. 2018. Available online: https://innovation.ukpowernetworks.co.uk/wp-content/uploads/2018/12/V2G-Global-Roadtrip-Around-the-World-in-50-Projects.pdf (accessed on 23 July 2022).
- Vehicle-to-Grid (V2G): Everything You Have to Know. Available online: https://www.virta.global/vehicle-to-grid-v2g (accessed on 23 July 2022).
- Schmidt, B. Volkswagen Wants to Stabilise the Grid by Adding V2G in All Its Electric Cars. The Driven, 7 April 2021. Available online: https://thedriven.io/2021/04/07/volkswagen-wants-to-stabilise-grid-by-adding-v2g-in-all-its-electric-cars (accessed on 23 July 2022).
- Hanley, S. Volkswagen Plans to Offer V2G and Plug&Charge Technology in 2022. Clean Technica, 23 December 2021. Available online: https://cleantechnica.com/2021/12/23/volkswagen-plans-to-offer-v2g-and-plug-charge-technology-in-2022 (accessed on 23 July 2022).
- Vehicle-to-Grid: Energy Storage on Wheels. EIT Innoenergy, 12 October 2021. Available online: https://www.eba250.com/vehicle-to-grid-energy-storage-on-wheels (accessed on 23 July 2022).
- ACES Project—Across Continents Electric Vehicle Services. 2017. Available online: https://www.aces-bornholm.eu (accessed on 16 July 2022).
- The Parker Project. 2016. Available online: https://parker-project.com (accessed on 16 July 2022).
- INVENT Project—Intelligent Electric Vehicle Integration. 2017. Available online: https://backend.orbit.dtu.dk/ws/portalfiles/portal/77554391/thesis_Peter_Bach_Andersen.PDF (accessed on 16 July 2022).
- Grid Motion Project—Reducing Electric Vehicle Usage Cost Thanks to Smart Charging Process. 2017. Available online: https://parker-project.com/wp-content/uploads/2018/12/VGI-Summit-Day-2-S2-Projects-Gridmotion.pdf (accessed on 16 July 2022).
- Industry Learning Reports. Available online: https://www.v2g-hub.com/reports (accessed on 24 July 2022).
- Wikipedia Contributors. CHAdeMO. Wikipedia, The Free Encyclopedia, 20 August 2022. Available online: https://en.wikipedia.org/w/index.php?title=CHAdeMO&oldid=1105514885 (accessed on 24 July 2022).
- Leemput, N.; Geth, F.; Juan Van, R.; Jeroen, B.; Johan, D.; Marinelli, M. Reactive power support in residential LV distribution grids through electric vehicle charging. Sustain. Energy Grids Netw. 2015, 3, 24–35. [Google Scholar] [CrossRef]
- Zecchino, A.; Marinelli, M. Analytical assessment of voltage support via reactive power from new electric vehicles supply equipment in radial distribution grids with voltage-dependent loads. Int. J. Electr. Power Energy Syst. 2018, 97, 17–27. [Google Scholar] [CrossRef]
- Arias, M.N.B.; Hashemi, S.; Andersen, P.B.; Træholt, C.; Romero, R. V2G Enabled EVs Providing Frequency Containment Reserves: Field Results. In Proceedings of the 2018 IEEE International Conference on Industrial Technology (ICIT 2018), Lyon, France, 20–22 February 2018; pp. 1–6. [Google Scholar]
- Yoshida, M.D.; Blech, T. CHAdeMO DC Charging: Successful Transition Towards Nation- and Region-Wide Zero-Emisson. CHAdeMO Association, April 2021. Available online: https://movelatam.org/portfolio-item/chademo-charging-protocol-for-electric-vehicles/ (accessed on 24 July 2022).
- Myles, B.; Robert, E. Making the right connections General procurement guidance for electric vehicle charge points. 2015. Available online: http://ukevse.org.uk/resources/procurement-guidance/ (accessed on 13 July 2022).
- Luyten, S.; Leemput, N.; Geth, F.; Van Roy, J.; Büscher, J.; Driesen, J. Standardization of Conductive AC Charging Infrastructure for Electric Vehicles. In Proceedings of the 22nd International Conference and Exhibition on Electricity Distribution (CIRED 2013), Stockholm, Sweden, 10–13 June 2013; Volume 2013. [Google Scholar] [CrossRef]
- Schwarzer, V.; Ghorbani, R. Current State-of-the-Art of EV Chargers; EVTC Electric Vehicle Transportation Centre: Cocoa, FL, USA, 2015; pp. 1–13. [Google Scholar]
- Quílez, M.G.; Abdel-Monem, M.; El Baghdadi, M.; Yang, Y.; Van Mierlo, J.; Hegazy, O. Modelling, analysis and performance evaluation of power conversion unit in G2V/V2G application-a review. Energies 2018, 11, 1082. [Google Scholar] [CrossRef]
- Cuma, M.U.; Tümay, M.; Yirik, E.; Ünal, E.; Dericioğlu, Ç.; Onur, B. A review of charging technologies for commercial electric vehicles. Int. J. Adv. Automot. Technol. 2018, 2, 61–70. [Google Scholar]
- China is Developing New GB/T Fast Charging Standard at 900kW. Insideevs Press Release, 19 Jun 2018. Available online: https://insideevs.com/news/338620/china-is-developing-new-gb-t-fast-charging-standard-at-900-kw (accessed on 13 September 2022).
- SAE International. SAE Electric Vehicle and Plug in Hybrid Electric Vehicle Conductive Charge Coupler; SAE International: Warrendale, PA, USA; Troy, MI, USA, 2013. [Google Scholar]
- International Electrotechnical Commission. Communication Networks and Systems for Power Utility Automation-Part 90-8: IEC 61850 Object Models for Electric Mobility; International Electrotechnical Commission: Geneva, Switzerland, 2014. [Google Scholar]
- Shin, M.; Kim, H.; Kim, H.; Jang, H. Building an Interoperability Test System for Electric Vehicle Chargers Based on ISO/IEC 15118 and IEC 61850 Standards. Appl. Sci. 2016, 6, 165. [Google Scholar] [CrossRef]
- Zecchino, A.; Thingvad, A.; Andersen, P.B.; Marinelli, M. Test and Modelling of Commercial V2G CHAdeMO Chargers to Assess the Suitability for Grid Services. World Electr. Veh. J. 2019, 10, 21. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Projects | Country | Connector Standard | Project Duration |
|---|---|---|---|
| Parker | Denmark | CHAdeMO | 2016–2018 |
| Redispatch V2G | Germany | CHAdeMO | 2018–2021 |
| CITY-ZEN | Netherland | CHAdeMO | 2014–2019 |
| Smart Solar Charging | Netherland | CHAdeMO/CCS | 2014–2019 |
| Grid Motion | France | CHAdeMO/CCS | 2017–2019 |
| ACES | Denmark | CHAdeMO | 2016-2018 |
| Network Impact of Grid-Integrated Vehicle | UK | CHAdeMO/CCS | 2017–2020 |
| Porto Santo | Portugal | IEC 62196-2/CHAdeMO | 2015–2020 |
| ZEMtoALL | Spain | CHAdeMO | 2012-2017 |
| Vehicle-to-Coffee | Germany | IEC 62196-2/CHAdeMO | 2015–2018 |
| NewMotion V2G | Netherland | CHAdeMO | 2017 |
| Amsterdam V2G | Netherland | CHAdeMO | 2013–2017 |
| SEEV4-City | 5 Cities in EU | CHAdeMO | 2016–2020 |
| SHAR-Q | Greece | IEC 62196-2/CHAdeMO | 2016–2019 |
| Denmark V2G | Denmark | CHAdeMO | 2016–Ongoing |
| Genoa Pilot | Italy | CHAdeMO | 2017–Ongoing |
| UK Vehicle-2-Grid (V2G) | UK | CHAdeMO | 2016–Ongoing |
| GrowSmarter | Spain | CHAdeMO | 2016–2019 |
| IEC 62196-2 | Type 1 | Type 2 | Type 3 |
|---|---|---|---|
| Coupler | 1-phase | 1-phase and 3-phase | 1-phase and 3-phase with shutters |
| Related standard | SAE J1772 Type 1 | VDE-AR-E 26232-2 | - |
| Maximum current | 32 A (80 A at the US) | 70 A (1-phase) 63 A (3-phase) | 16 A (1-phase) 32 A (3-phase)/63 A(3-phase) |
| Maximum voltage | 250 V | 480 V (3-phase) | 250 V/400 V |
| Maximum power | 19 kW | 43.5 kW | 22 kW (3-phase) |
| Pin and interlock | 5 pins, mechanic lock | 7 pins, electronic lock | 4 pins or 5 pins |
| Control pin | Two short pins | One short, one long pin | - |
| Communication | PWM over CP | PWM over CO | - |
 |  |  |
| Parameter Description | Rated Values | |
|---|---|---|
| Maximum current | 120 A |  |
| Maximum voltage | 500 V DC | |
| Maximum power | 50 kW | |
| Maximum current (control system) | 7 A | |
| Maximum voltage (control system) | 12 V DC | |
| Level of charging | DC level 3 | |
| Control pin | 7 pins | |
| Communication protocol | CHAdeMO (CAN communication) |
| Pin ID | Wire Cross Section (mm2) | Description | |
|---|---|---|---|
| 1 | 0.75 | Ground |  |
| 2 | 0.75 | Start/stop charging 1 | |
| 3 | None | ||
| 4 | 0.75 | Permission/prohibition charging | |
| 5 | 22 or 40 | DC supply negative | |
| 6 | 22 or 40 | DC supply positive | |
| 7 | 0.75 | Verification of the connector connection | |
| 8 | 0.75 | CAN High | |
| 9 | 0.75 | CAN Low | |
| 10 | 0.75 | Start/stop charging 2 |
| Parameters | Combo Type 1 (US) | Combo Type 2 (EU) |
|---|---|---|
 |  | |
| DC Charging | ||
| Maximum current | 150 A | 200 A |
| Maximum voltage | 600 V | 850 V |
| Charging mode | 4 | 4 |
| Maximum power | 90 kW | 170 kW |
| Connector type | Combo 1 (IEC 62196-3) | Combo 2 (IEC 62196-3) |
| AC Charging | ||
| Nominal current | 32 A | 70 A (1-phase)/63 A (3-phase) |
| Nominal voltage | 250 V | 230 V (1-phase)/400 V (3-phase) |
| Charging mode | 3 | 3 |
| Maximum power | 13 kW | 44 kW |
| Connector type | Type 1 (IEC 62196-2, SAE J1772) | Type 2 (IEC 62196-2) |
| Pin | Functions | Comments | Combo Type 1 |
|---|---|---|---|
| PP | Communication/Charging process control | Proximity inlet |  |
| CP | Control pilot | ||
| PE | Earth ground | EV to earth ground | |
| L1/N | AC 1-phase charging | Phase 1/Neutral | |
| L2 | Phase 2 | ||
| DC+ | DC charging | DC positive terminal | |
| DC- | DC negative terminal | ||
| Pin | Functions | Comments | Combo Type 2 |
| PP | Communication/Charging process control | Proximity inlet |  |
| CP | Control pilot | ||
| PE | Earth ground | EV to earth ground | |
| L1 | AC 3-phase Charging | Phase 1 | |
| L2 | Phase 2 | ||
| L3 | Phase 3 | ||
| N | Neutral | ||
| DC+ | DC Charging | DC positive terminal | |
| DC- | DC negative terminal |
| Specification | New GB/T | GB/T | CHAdeMO | CCS Type 1 | Tesla |
|---|---|---|---|---|---|
 |  |  |  |  | |
| Max Power | 900 kW | 237.5 kW | 400 kW | 400 kW | 135 kW |
| No. of Control Pilot | 2 | 0 | 3 | 1 | 1 |
| Communication | CAN (SAE J1939) | CAN (SAE J1939) | CAN (ISO 11898) | PLC (ISO 15118) | CAN (SAE J2411) |
| +12 V Power Supply | Yes | Optional | Yes | No | No |
| V2G Compatible | Unknown | Under R&D | Yes | Under R&D | No |
| Coupler Lock | Inlet | Connector | Connector | Inlet | Inlet |
| Availability | China | China, India | Global | EU, US, A | Global |
| Related Standards | IEC 61851-23-1 IEC 61851-23-2 | IEC 61851-23-1 | IEC 61851-23-1 IEC 61851-23-2 IEEE 2030.1 | IEC 61851-23-1 SAE J1772 | None |
| Cooling Technique | Liquid-Cooled Cable Under Development | Liquid-Cooled Cable Not Available | Liquid-Cooled Cable Under Development | Liquid-Cooled Cable Under Development | Liquid-Cooled Cable Discontinued |
| Test No | Contents | Target | Protocol | Result |
|---|---|---|---|---|
| 1 | Slack Parameter Exchange | EVCC | SLAC | Pass |
| 2 | Signal Strength Measurement | EVCC | SLAC | Pass |
| 3 | Logical Network Parameter Exchange | EVCC | SLAC | Pass |
| 4 | Control Pilot Voltage Range | EVCC | IEC 61851 | Pass |
| 5 | Control Pilot Frequency Range | EVCC | IEC 61851 | Pass |
| 6 | Control Pilot Duty-Cycle Range | EVCC | IEC 61851 | Pass |
| 7 | SECC Discovery Protocol (SDP) | EVCC | ISO 15118 | Pass |
| 8 | Supported Application Protocol | EVCC | ISO 15118 | Pass |
| 9 | Session Setup Message | EVCC | ISO 15118 | Pass |
| 10 | Service Discovery | EVCC | ISO 15118 | Pass |
| 11 | Payment Service Selection | EVCC | ISO 15118 | Pass |
| 12 | Payments Details | EVCC | ISO 15118 | Pass |
| 13 | Authorization | EVCC | ISO 15118 | Pass |
| 14 | Charge Parameter Discovery | EVCC | ISO 15118 | Pass |
| 15 | Cable Check | EVCC | ISO 15118 | Pass |
| 16 | Pre-Charge | EVCC | ISO 15118 | Pass |
| 17 | Power Delivery (Start) | EVCC | ISO 15118 | Pass |
| 18 | Current Demand | EVCC | ISO 15118 | Pass |
| 9 | Power Delivery (Stop) | EVCC | ISO 15118 | Pass |
| 20 | Welding Detection | EVCC | ISO 15118 | Pass |
| 21 | Session Stop | EVCC | ISO 15118 | Pass |
| 22 | Power Delivery (Negative) | EVCC | ISO 15118 | Pass |
| Performance Indices | V2G Test with CHAdeMO [37] | V2G Test with Combo CCS 2 |
|---|---|---|
| Signal Activation Delay | 4 s | 2 s |
| Setpoint Linearity | <4% (Power Setpoint 400 W) | <1.5% (Current Setpoint 0.2 A) |
| Measurement Accuracy | 4.4% (Power measurement) | 2.56% (Current Measurement) |
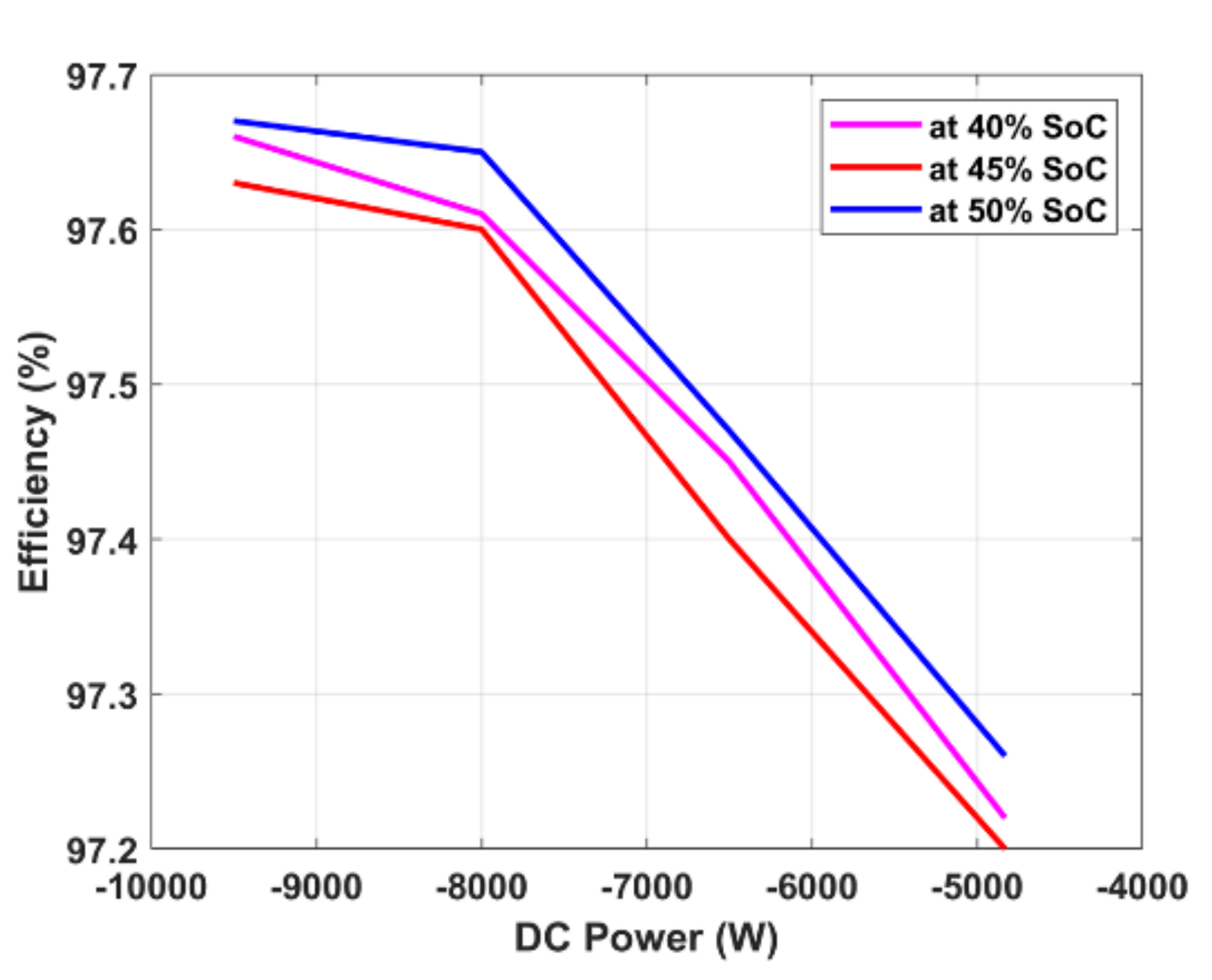
| V2G Efficiency (@50% SoC and 8 kW Power Delivery) | Around 93% | Around 97% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jaman, S.; Verbrugge, B.; Garcia, O.H.; Abdel-Monem, M.; Oliver, B.; Geury, T.; Hegazy, O. Development and Validation of V2G Technology for Electric Vehicle Chargers Using Combo CCS Type 2 Connector Standards. Energies 2022, 15, 7364. https://doi.org/10.3390/en15197364
Jaman S, Verbrugge B, Garcia OH, Abdel-Monem M, Oliver B, Geury T, Hegazy O. Development and Validation of V2G Technology for Electric Vehicle Chargers Using Combo CCS Type 2 Connector Standards. Energies. 2022; 15(19):7364. https://doi.org/10.3390/en15197364
Chicago/Turabian StyleJaman, Shahid, Boud Verbrugge, Oscar Hernandez Garcia, Mohamed Abdel-Monem, Blum Oliver, Thomas Geury, and Omar Hegazy. 2022. "Development and Validation of V2G Technology for Electric Vehicle Chargers Using Combo CCS Type 2 Connector Standards" Energies 15, no. 19: 7364. https://doi.org/10.3390/en15197364
APA StyleJaman, S., Verbrugge, B., Garcia, O. H., Abdel-Monem, M., Oliver, B., Geury, T., & Hegazy, O. (2022). Development and Validation of V2G Technology for Electric Vehicle Chargers Using Combo CCS Type 2 Connector Standards. Energies, 15(19), 7364. https://doi.org/10.3390/en15197364