
An Electromagnetic Wind Energy Harvester Based on Rotational Magnet Pole-Pairs for Autonomous IoT Applications



Abstract
:1. Introduction
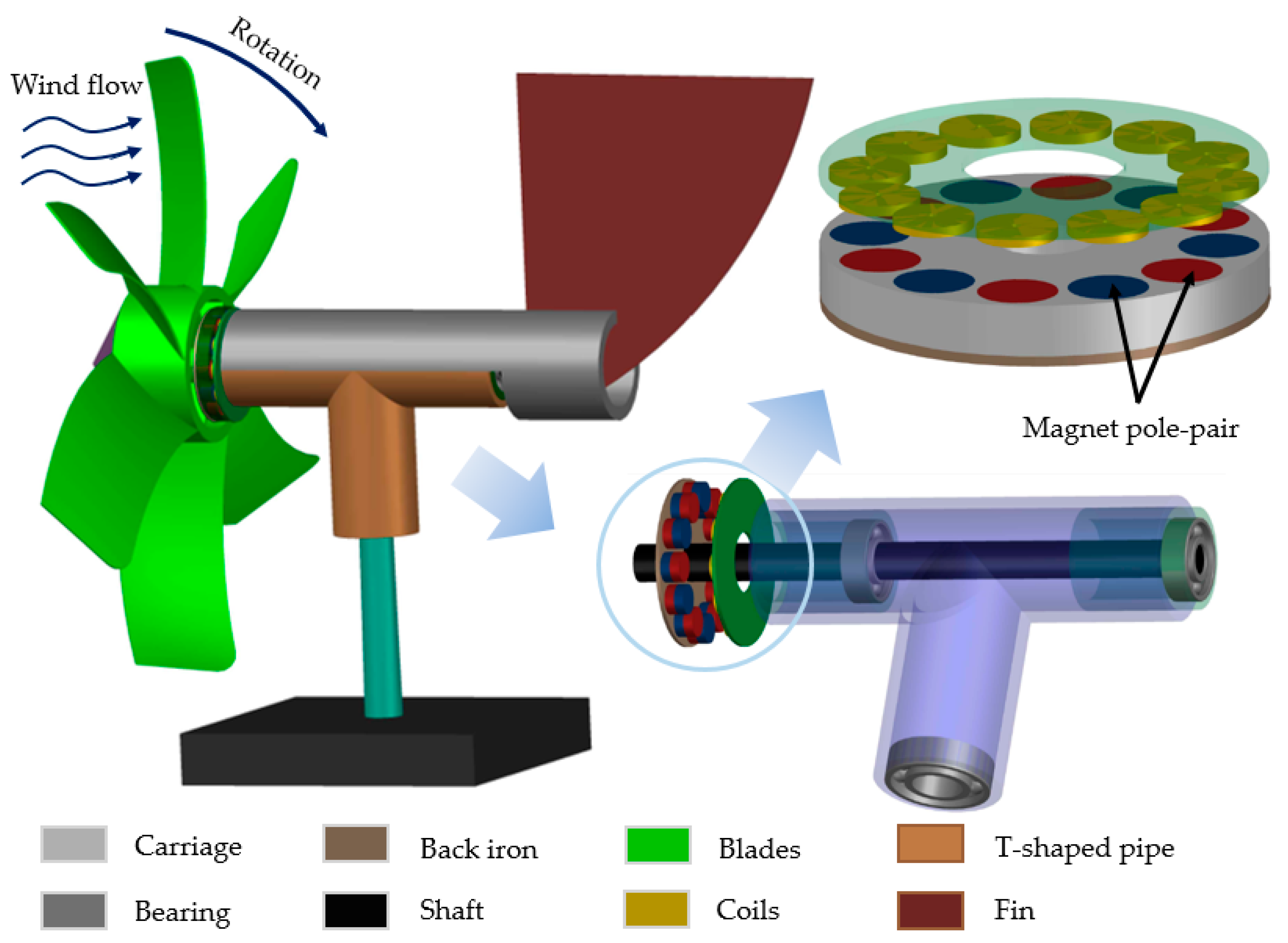
2. Harvester Structure and Its Working Principle
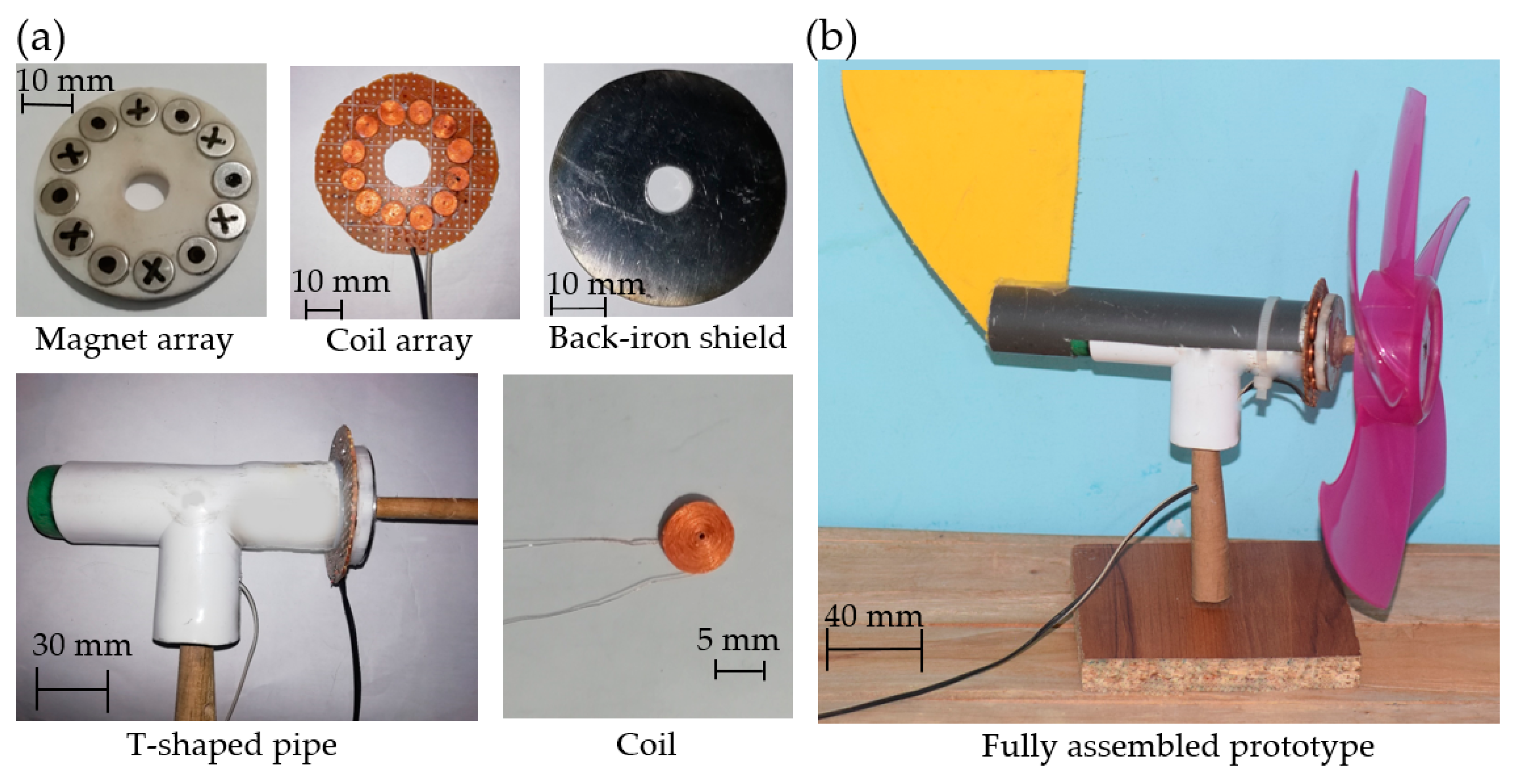
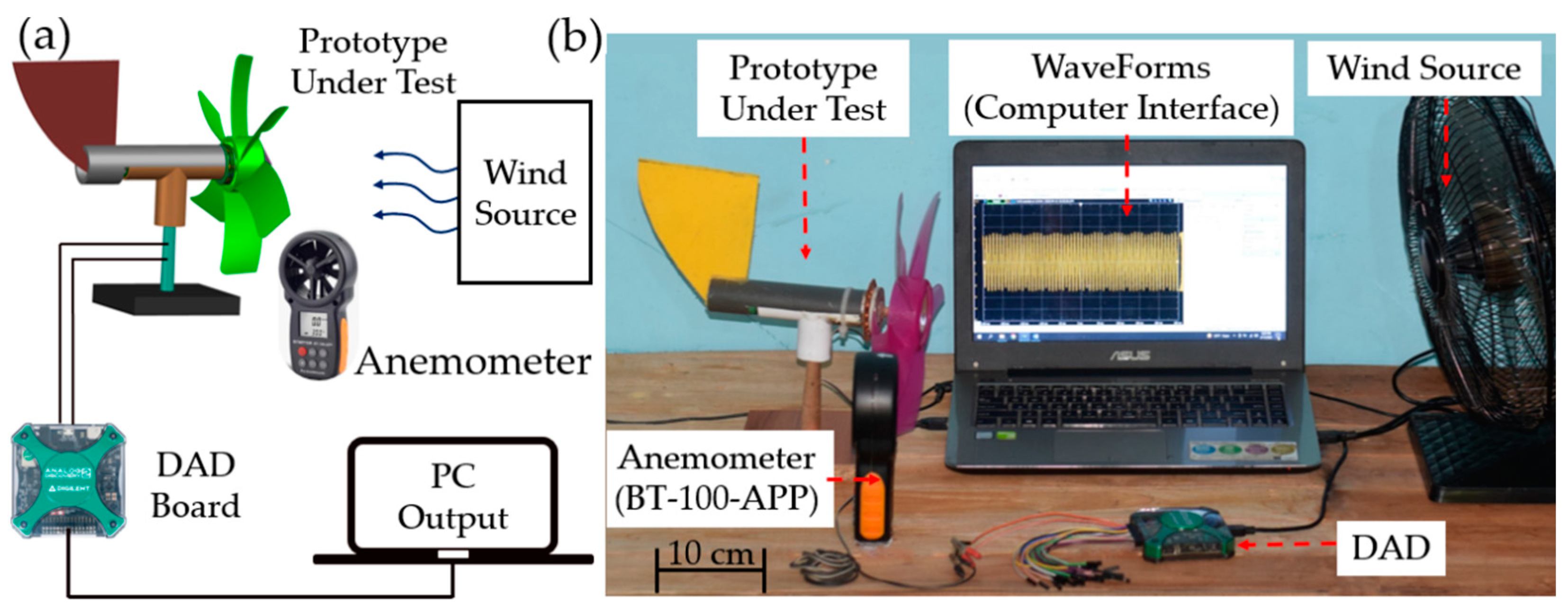
3. Prototype and Experimental Setup
4. Results and Discussion
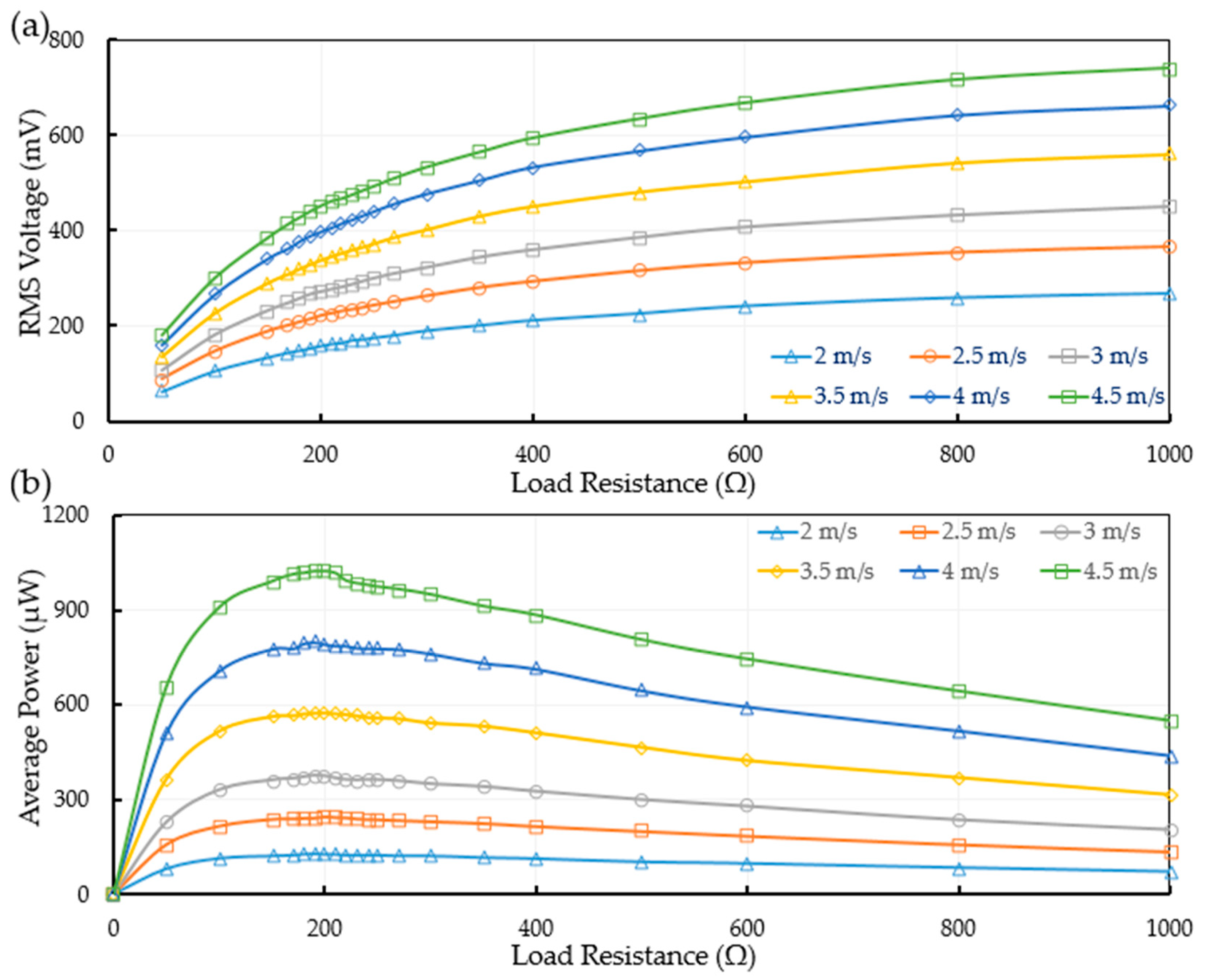
4.1. Transducer Outputs
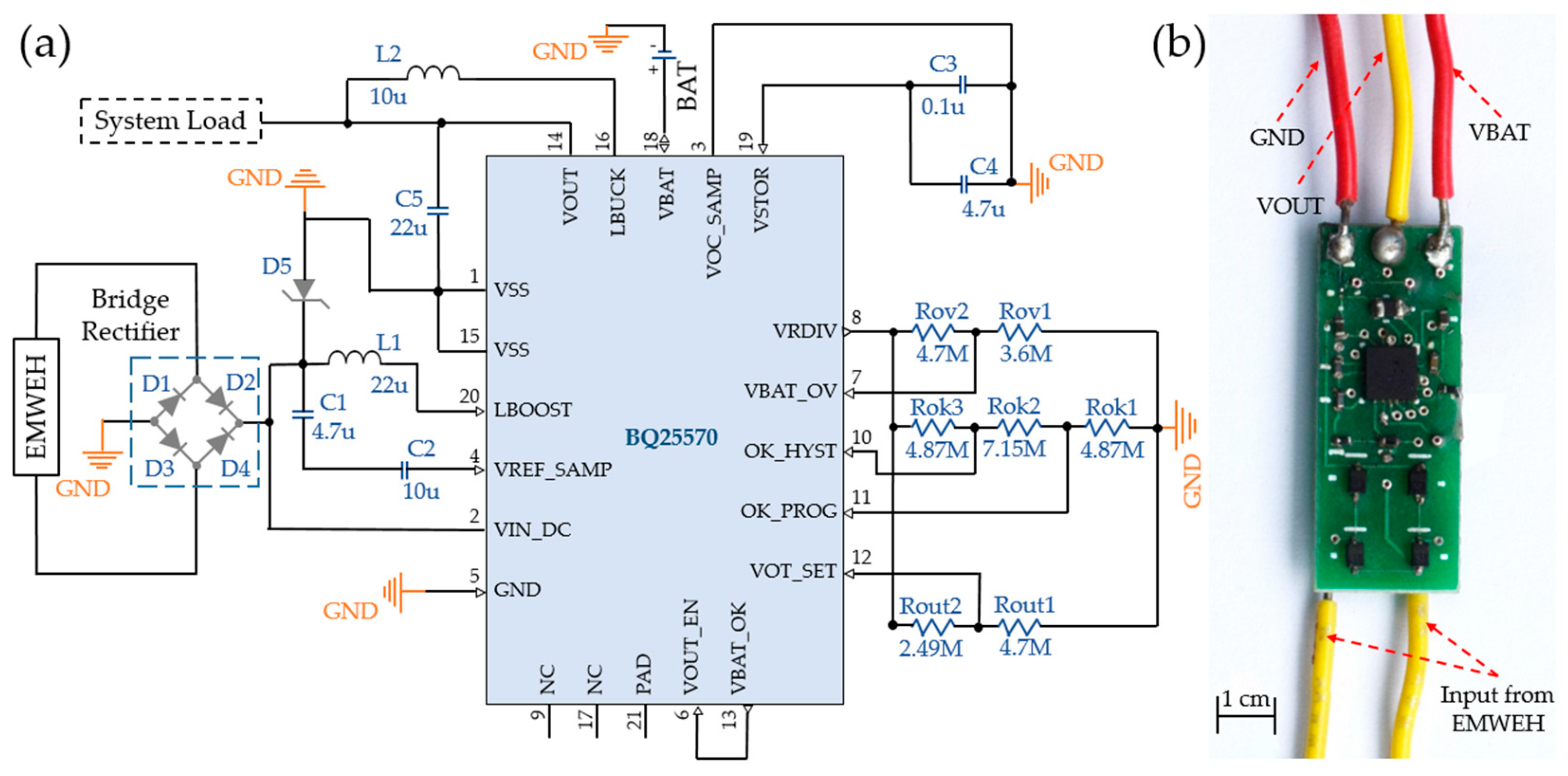
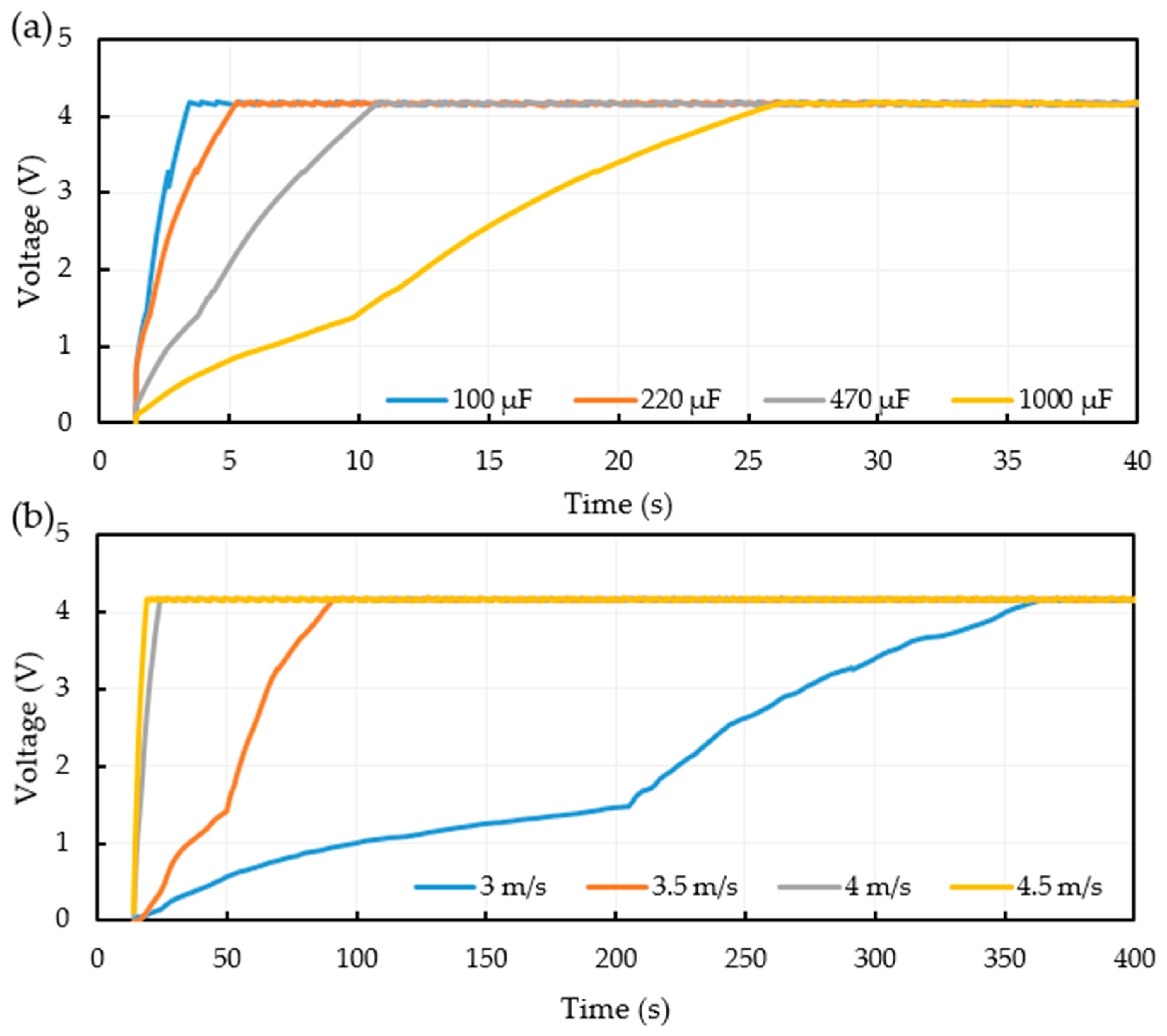
4.2. Power Management Circuit (PMC)
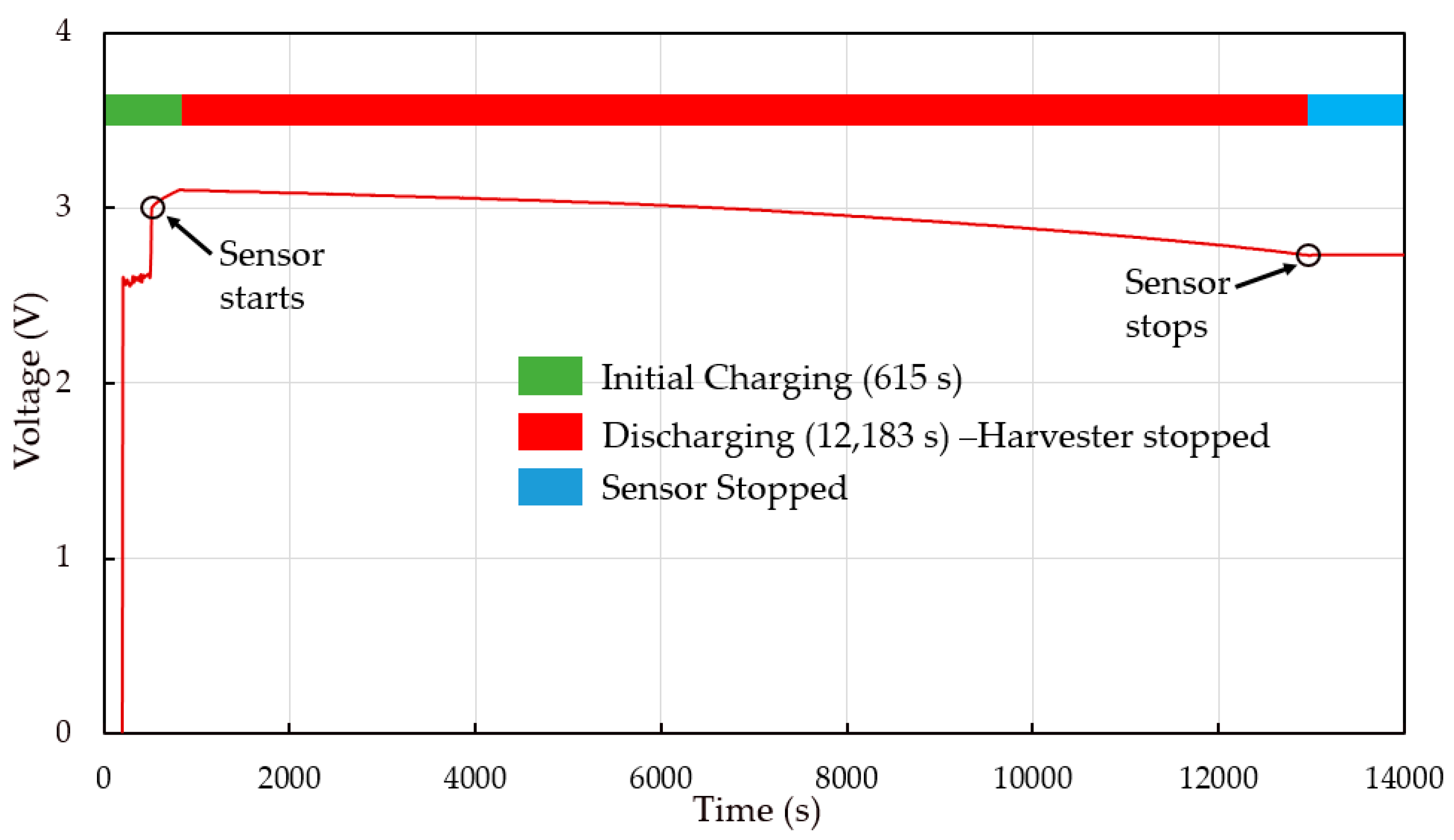
4.3. System-Level Demonstration
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hittinger, E.; Jaramillo, P. Internet of Things: Energy boon or bane. Science 2019, 364, 326–328. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shaikh, F.K.; Zeadally, S. Energy harvesting in wireless sensor networks: A comprehensive review. Renew. Sustain. Energy Rev. 2016, 55, 1041–1054. [Google Scholar] [CrossRef]
- Clercq, M.D.; Vats, A.; Biel, A. Agriculture-4.0: The Future of Farming Technology. Available online: https://www.worldgovernmentsummit.org/api/publications/document?id=95df8ac4-e97c-6578-b2f8-ff0000a7ddb6 (accessed on 1 February 2018).
- Truitt, A.; Mahmoodi, S.N. A review on active wind energy harvesting designs. Int. J. Precis. Eng. Manuf. 2013, 14, 1667–1675. [Google Scholar] [CrossRef]
- Mateu, L.; Moll, F. Review of energy harvesting techniques and applications for microelectronics. Proc. SPIE 2005, 5837, 359–373. [Google Scholar]
- Liu, W.; Chen, J.; Chen, Z.; Liu, K.; Zhou, G.; Sun, Y.; Song, M.S.; Bao, Z.; Cui, Y. Stretchable Lithium-Ion Batteries Enabled by Device-Scaled Wavy Structure and Elastic-Sticky Separator. Adv. Energy Mater. 2017, 7, 1701076. [Google Scholar] [CrossRef]
- Mohanty, A.; Parida, S.; Behera, R.K.; Roy, T. Vibration energy harvesting: A review. J. Adv. Dielectr. 2019, 9, 1930001. [Google Scholar] [CrossRef]
- Kishore, R.A.; Priya, S. A review on low-grade thermal energy harvesting: Materials, methods and devices. Materials 2018, 11, 1433. [Google Scholar] [CrossRef] [Green Version]
- Kannan, N.; Vakeesan, D. Solar energy for future world: A review. Renew. Sustain. Energy Rev. 2016, 62, 1092–1105. [Google Scholar] [CrossRef]
- Wang, J.; Geng, L.; Ding, L.; Zhu, H.; Yurchenko, D. The state-of-the-art review on energy harvesting from flow-induced vibrations. Appl. Energy 2020, 267, 114902. [Google Scholar] [CrossRef]
- Tummala, A.; Velamati, R.K.; Sinha, D.K.; Indraja, V.; Krishna, V.H. A review on small scale wind turbines. Renew. Sustain. Energy Rev. 2016, 56, 1351–1371. [Google Scholar] [CrossRef]
- Bryant, M.; Wolff, E.; Garcia, E. Aeroelastic flutter energy harvester design: The sensitivity of the driving instability to system parameters. Smart Mater. Struct. 2011, 20, 125017. [Google Scholar] [CrossRef]
- Hu, G.; Tse, K.T.; Kwok, K.C.S.; Song, J.; Lyu, Y. Aerodynamic modification to a circular cylinder to enhance the piezoelectric wind energy harvesting. Appl. Phys. Lett. 2016, 109, 193902. [Google Scholar] [CrossRef]
- Dai, H.L.; Abdelkefi, A.; Yang, Y.; Wang, L. Orientation of bluff body for designing efficient energy harvesters from vortex-induced vibrations. Appl. Phys. Lett. 2016, 108, 053902. [Google Scholar] [CrossRef]
- Zhang, C.; Hu, G.; Yurchenko, D.; Lin, P.; Gu, S.; Song, D.; Peng, H.; Wang, J. Machine learning based prediction of piezoelectric energy harvesting from wake galloping. Mech. Syst. Signal Process. 2021, 160, 107876. [Google Scholar] [CrossRef]
- Quy, V.D.; Sy, N.V.; Hung, D.T.; Huy, V.Q. Wind tunnel and initial field tests of a micro generator powered by fluid-induced flutter. Energy Sustain. Dev. 2016, 33, 75–83. [Google Scholar]
- Ali, M.; Arafa, M.; Elaraby, M. Harvesting energy from galloping oscillations. In Proceedings of the World Congress on Engineering, WCE, London, UK, 3–5 July 2013; Volume III. [Google Scholar]
- Kumar, S.K.; Bose, C.; Ali, S.F.; Sarkar, S.; Gupta, S. Investigations on a vortex induced vibration based energy harvester. Appl. Phys. Lett. 2017, 111, 243903. [Google Scholar] [CrossRef]
- Usman, M.; Hanif, A.; Kim, I.-H.; Jung, H.-J. Experimental validation of a novel piezoelectric energy harvesting system employing wake galloping phenomenon for a broad wind spectrum. Energy 2018, 153, 882–889. [Google Scholar] [CrossRef]
- Howey, D.A.; Bansal, A.; Holmes, A.S. Design and performance of a centimetre-scale shrouded wind turbine for energy harvesting. Smart Mater. Struct. 2011, 20, 085021. [Google Scholar] [CrossRef] [Green Version]
- Weimer, M.A.; Paing, T.S.; Zane, R.A. Remote Area Wind Energy Harvesting for Low-Power Autonomous Sensors. In Proceedings of the Power Electronics Specialists Conference, Jeju, Korea, 18–22 June 2006. [Google Scholar]
- Silva, A.G.P.; Sobrinho, J.M.B.; Souto, C.R.; Ries, A.; Castro, A.C. Design, modelling and experimental analysis of a piezoelectric wind energy generator for low-power applications. Sens. Actuators A 2021, 317, 112462. [Google Scholar] [CrossRef]
- Perez, M.; Boisseau, S.; Geisler, M.; Despesse, G.; Reboud, J.L. A triboelectric wind turbine for small-scale energy harvesting. J. Phys. Conf. Ser. 2016, 773, 012118. [Google Scholar] [CrossRef]
- Rahman, M.T.; Salauddin, M.; Maharjan, P.; Rasel, M.S.; Cho, H.; Park, J.Y. Natural wind-driven ultra-compact and highly efficient hybridized nanogenerator for self-sustained wireless environmental monitoring system. Nano Energy 2019, 57, 256–268. [Google Scholar] [CrossRef]
- Yang, Y.; Shen, Q.; Jin, J.; Wang, Y.; Qian, W.; Yuan, D. Rotational piezoelectric wind energy harvesting using impact-induced resonance. Appl. Phys. Lett. 2014, 105, 053901. [Google Scholar] [CrossRef]
- Fu, H.; Yeatman, E.M. A methodology for low-speed broadband rotational energy harvesting using piezoelectric transduction and frequency up-conversion. Energy 2017, 125, 152–161. [Google Scholar] [CrossRef] [Green Version]
- Fu, H.; Yeatman, E.M. A miniaturized piezoelectric turbine with self-regulation for increased air speed range. Appl. Phys. Lett. 2015, 107, 243905. [Google Scholar] [CrossRef] [Green Version]
- Han, N.; Zhao, D.; Schluter, J.U.; Goh, E.S.; Zhao, H.; Jin, X. Performance evaluation of 3D printed miniature electromagnetic energy harvesters driven by air flow. Appl. Energy 2016, 178, 672–680. [Google Scholar] [CrossRef]
- Wu, W.; Lee, D.-W. An electromagnetic energy harvesting device based on high efficiency windmill structure for wireless forest fire monitoring application. Sens. Actuators A 2014, 219, 73–79. [Google Scholar] [CrossRef]
- Ahmed, A.; Hassan, I.; Hedaya, M.; El-Yazid, T.A.; Zu, J.; Wang, Z.L. Farms of triboelectric nanogenerators for harvesting wind energy: A potential approach towards green energy. Nano Energy 2017, 36, 21–29. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, X.; Yin, M.; Wang, J.; Gao, Q.; Yu, Y.; Cheng, T.; Wang, Z.L. Gravity triboelectric nanogenerator for the steady harvesting of natural wind energy. Nano Energy 2021, 82, 105740. [Google Scholar] [CrossRef]
- Zhao, L.-C.; Zou, H.-X.; Yan, G.; Liu, F.-R.; Tan, T.; Zhang, W.-M.; Peng, Z.-K.; Meng, G. A water-proof magnetically coupled piezoelectric-electromagnetic hybrid wind energy harvester. Appl. Energy 2019, 239, 735–746. [Google Scholar] [CrossRef]
- Zhao, C.; Zhang, Q.; Zhang, W.; Du, X.; Zhang, Y.; Gong, S.; Ren, K.; Sun, Q.; Wang, Z.L. Hybrid piezo/triboelectric nanogenerator for highly efficient and stable rotation energy harvesting. Nano Energy 2019, 57, 440–449. [Google Scholar] [CrossRef]
- Guo, Y.; Chen, Y.; Ma, J.; Zhu, H.; Cao, X.; Wang, N.; Wang, Z.L. Harvesting wind energy: A hybridized design of pinwheel by coupling triboelectrification and electromagnetic induction effects. Nano Energy 2019, 60, 641–648. [Google Scholar] [CrossRef]
- Rezaei-Hosseinabadi, N.; Tabesh, A.; Dehghani, R.; Aghili, A. An efficient piezoelectric windmill topology for energy harvesting from low-speed air flows. IEEE Trans. Ind. Electron. 2015, 62, 3576–3583. [Google Scholar]
- Mukund, R.P. Wind and Solar Power Systems–Design, Analysis and Operation; Taylor/Francis: New York, NY, USA, 2006. [Google Scholar]
- Kumar, R.V.; Sarakonsri, T. Lithium-Ion Batteries. In High Energy Density Lithium Batteries: Materials, Engineering, Applications, 1st ed.; Aifantis, K.E., Hackney, S.A., Kumar, R.V., Eds.; Wiley-VCH: Hoboken, NJ, USA, 2010; pp. 70–74. [Google Scholar]
- Kwon, S.D. A T-shaped piezoelectric cantilever for fluid energy harvesting. Appl. Phys. Lett. 2010, 97, 164102. [Google Scholar] [CrossRef]
- Zhang, J.; Fang, Z.; Shu, C.; Zhang, J.; Zhang, Q.; Li, C. A rotational piezoelectric energy harvester for efficient wind energy harvesting. Sens. Actuators A 2017, 262, 123–129. [Google Scholar] [CrossRef]
- Iqbal, M.; Khan, F.U. Hybrid vibration and wind energy harvesting using combined piezoelectric and electromagnetic conversion for bridge health monitoring applications. Energy Convers. Manag. 2018, 172, 611–618. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Parameter | Value |
|---|---|---|
| Rotor | Magnet dimension | Ø8 mm × 5 mm |
| Carriage dimension | Ø44 mm × 6 mm | |
| Back-iron thickness | 1 mm | |
| Coil | Coil inner diameter | 0.5 mm |
| Coil outer diameter | 8 mm | |
| Coil thickness | 1 mm | |
| Number of turns (each) | 350 | |
| Coil resistance (each) | 17 Ω | |
| PCB thickness | 1 mm | |
| Bearing | Inner diameter | 8 mm |
| Outer diameter | 22 mm | |
| Height | 7 mm | |
| Turbine | Diameter | 230 mm |
| Number of blades | 5 |
| Parameter | 3 m/s | 3.5 m/s | 4 m/s | 4.5 m/s |
|---|---|---|---|---|
| Max. AC power (µW) | 375 | 573 | 798 | 1022 |
| Max. DC power (µW) | 277 | 432 | 552 | 737 |
| Max. efficiency (%) | 73.8 | 75.4 | 69.2 | 72.1 |
| Reference | Harvester Type | Transducer Type | Wind Speed (ms−1) | Transducer Swept Area (cm2) | Avg. Power (µW) | PD Per Swept Area (µW cm−2) | NPD (µW cm−2/ms−1) |
|---|---|---|---|---|---|---|---|
| Kwon [38] | Translational | PE | 4.6 | 60 | 250 | 4.2 | 0.9 |
| Hu [13] | Translational | PE | 7 | 52 | 39 | 0.7 | 0.12 |
| Zhang [39] | Rotational | PE | 7 | 684 | 800 | 1.2 | 0.17 |
| Iqbal [40] | Translational | EM-PE | 6 | 11.3 | 11.4 | 1 | 0.17 |
| Zhao [32] | Rotational | EM-PE | 7 | 110 | 1218 | 11 | 1.6 |
| Howey [20] | Rotational | EM | 4 | 8 | 56 | 7 | 1.7 |
| This work | Rotational | EM | 2 | 15.2 | 122 | 8 | 4 |
| 3.5 | 572 | 37.6 | 10.7 | ||||
| 4.5 | 1020 | 67.1 | 14.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roy, S.; Kabir, M.H.; Salauddin, M.; Halim, M.A. An Electromagnetic Wind Energy Harvester Based on Rotational Magnet Pole-Pairs for Autonomous IoT Applications. Energies 2022, 15, 5725. https://doi.org/10.3390/en15155725
Roy S, Kabir MH, Salauddin M, Halim MA. An Electromagnetic Wind Energy Harvester Based on Rotational Magnet Pole-Pairs for Autonomous IoT Applications. Energies. 2022; 15(15):5725. https://doi.org/10.3390/en15155725
Chicago/Turabian StyleRoy, Sajib, Md Humayun Kabir, Md Salauddin, and Miah A. Halim. 2022. "An Electromagnetic Wind Energy Harvester Based on Rotational Magnet Pole-Pairs for Autonomous IoT Applications" Energies 15, no. 15: 5725. https://doi.org/10.3390/en15155725
APA StyleRoy, S., Kabir, M. H., Salauddin, M., & Halim, M. A. (2022). An Electromagnetic Wind Energy Harvester Based on Rotational Magnet Pole-Pairs for Autonomous IoT Applications. Energies, 15(15), 5725. https://doi.org/10.3390/en15155725