
An Overview of Dynamic Inductive Charging for Electric Vehicles



Abstract
1. Introduction
- –
- Static or stationary charging;
- –
- In-motion, on-line. or dynamic charging;
- –
- Quasi-dynamic or opportunistic charging.
2. Architecture of Dynamic Inductive Pads
2.1. Pad Implementation of DIPT System
2.2. Architecture of the Transmitter Pad in DIPTs
2.2.1. Single Long Coil Track
2.2.2. Segmented Coil Array
2.3. Architecture of the Receiver Pad in DIPT
3. Compensation Networks
3.1. Single-Element Resonant Topologies
3.2. Basic Topologies
3.3. Hybrid Topologies
4. Power Electronic Converters
4.1. Transmitter-Side Conversion
4.1.1. Dual-Stage Converters
4.1.2. Single Stage Converters
- (a)
- Single-Phase matrix converter (MC)
- (b)
- Three-Phase matrix converter (MC)
4.2. Receiver-Side Converters
5. Control System
5.1. Transmitter-Side Control
5.1.1. Transmitter dc-dc Converter
5.1.2. Transmitter Inverter
5.2. Receiver-Side Control
5.2.1. Receiver dc-dc Converter
5.2.2. Receiver-Controlled Rectifier
5.3. Dual-Side Control
6. R&D and Standardization Activities
6.1. R&D of DIPT Systems
6.2. Standardization Activities for WPT
- –
- The standards consider incompatible shapes of coils such as circular/rectangular and double-D (DD), which do not work with each other efficiently [30]. This raises interoperability concerns and requires additional efforts to make the system interoperable and increases the system cost.
- –
- Many details and information are missing in the standards related to compensation topologies, power converters, control, and system operation.
- –
- These standards are developed for light-duty EVs with slow charging (up to 20 kW); however, standards that cover fast wireless charging for light-, medium-, and heavy-duty EVs do not exist.
- –
- Standards must incorporate appropriate transmitter design including coil configuration, compensation topology, power converters, coil detection, control, and data communication.
- –
- Design considerations must be presented to ensure the interoperability between static and dynamic charging systems, so an EV with a wireless pad can be charged using a static and dynamic system. Additionally, since the system will be installed and operate on public roadways, it must be applicable for different types/classes of EVs regardless of model, size, manufacture, etc.
- –
- Safety topics related to EMFs, object detection, and access control must be addressed, showing the requirements and testing procedures to ensure the compatibility of the system to these requirements.
- –
- They should include methods to integrate the transmission station (transmitter pad, compensation circuit, and converter) with the road and the impact of different road materials, such concrete and asphalt, on the system performance.
- –
- They must present details for system packaging, thermal management, and cooling processes for outdoor installation and operation.
- –
- The standards should incorporate how to integrate the system with the grid, including grid interface, impacts, and mitigation techniques.
- –
- Standards should include information about system level design and characteristics in terms of power level and roadway coverage, considering vehicle speed, vehicle efficiency, road condition, grid availability, etc.
7. Challenges and Opportunities of DIPT Technology
7.1. Implementation
- –
- Interoperability: Additional efforts are needed to investigate the interoperable operation among various kinds of pad designs. How can the interoperability options be tested and estimated? Which models achieve interoperable principle with others? The effect of various implementation conditions for the transmitter pad (above-, flush-, and under-ground) on the interoperability concept of the IPT system must be explored, and the interoperability of different types of receiver pads with a static and dynamic transmitter considering the different integrations with the road must be investigated.
- –
- Durability: WPT systems will be implemented outdoor for general use, so they need to be robust enough to withstand the harsh environmental and extreme operating conditions. In addition, the method of pad integration with both the vehicle and road is an open question that requires extensive engineering effort.
7.2. Safety Concerns
7.3. Technologies
- –
- Cost: Extra efforts are needed to keep the system’s cost low by using cost-effective materials (wires, magnetic cores, and shielding materials), manufacturing, and implementation processes. DIPT can mitigate the high cost of EVs by substantially reducing the onboard battery size. The lack of a charging infrastructure is currently the main impediment to DIPT. Therefore, efforts from the private sector and also from the government are required to work on improving the infrastructure in the hope of reducing the total cost of the dynamic charging system.
- –
- Communication system: Communication is essential in DIPT to ensure that the power transfers to the battery charging system in time or else the charging system is likely to fail. Therefore, the data exchange between the transmitter and the receiver must take place in actual time [324]. In the ideal scenario, a real-time control system would be established to implement the control loop of the battery charging system. However, the control in DIPT systems gives good performance despite the delay caused by wireless communications. The wireless communication system needs to be improved to transmit data of the coupling factor between the receiver and transmitter sides for better charging, accuracy, security, and reduced delay time.
- –
- Fast Charging: There is a current need to design chargers that are able to bring the charging time down to less than 15 min. Therefore, investigating high-power wireless chargers (>200 kW) is a gap that needs to be filled. Novel pad designs with new magnetic materials, wires, and shielding are crucial so that the system can transfer high power efficiently at a reasonable cost and work at high misalignment conditions and with a larger air gap.
- –
- Sensor systems: It is necessary to achieve the development of the sensor systems and controllers that are used to detect EVs on the highways in DIPT with segmented coils to charge batteries without errors to increase total system efficiency.
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Morrow, W.R.; Lee, H.; Gallagher, K.S.; Collantes, G. Reducing the US Transportation Sector’s Oil Consumption and Greenhouse Gas Emissions; Harvard Kennedy School: Cambridge, MA, USA, 2010. [Google Scholar]
- Macharia, J. Wireless Inductive Charging for Low Power Devices. Ph.D. Thesis, Helsinki Metropolia University of Applied Sciences, Helsinki, Finland, 2017. [Google Scholar]
- Hertz’s Experiments. 1887. Available online: http://people.seas.harvard.edu/~jones/cscie129/nu_lectures/lecture6/hertz/Hertz_exp.html (accessed on 23 October 2019).
- Tesla, N. Experiments with alternate currents of high potential and high frequency. J. Inst. Electr. Eng. 1892, 21, 51–162. [Google Scholar] [CrossRef]
- Wei, X.; Wang, Z.; Dai, H. A Critical Review of Wireless Power Transfer via Strongly Coupled Magnetic Resonances. Energies 2014, 7, 4316–4341. [Google Scholar] [CrossRef]
- Kurs, A.; Karalis, A.; Moffatt, R.; Joannopoulos, J.D.; Fisher, P.; Soljačić, M. Wireless Power Transfer via Strongly Coupled Magnetic Resonances. Science 2007, 317, 83–86. [Google Scholar] [CrossRef] [PubMed]
- Mohamed, A.A.; Shaier, A.A.; Metwally, H.; Selem, S.I. A comprehensive overview of inductive pad in electric vehicles stationary charging. Appl. Energy 2020, 262, 114584. [Google Scholar] [CrossRef]
- Qiu, C.; Chau, K.T.; Ching, T.W.; Liu, C. Overview of Wireless Charging Technologies for Electric Vehicles. J. Asian Electr. Veh. 2014, 12, 1679–1685. [Google Scholar] [CrossRef]
- Ahmad, A.; Alam, M.S.; Chabaan, R. A Comprehensive Review of Wireless Charging Technologies for Electric Vehicles. IEEE Trans. Transp. Electrif. 2017, 4, 38–63. [Google Scholar] [CrossRef]
- Roes, M.G.L.; Duarte, J.L.; Hendrix, M.A.M.; Lomonova, E.A. Acoustic Energy Transfer: A Review. IEEE Trans. Ind. Electron. 2013, 60, 242–248. [Google Scholar] [CrossRef]
- Thakur, R.; Natale, A. High efficiency wireless power transmission at low frequency using permanent magnet coupling. Cardiol. Clin. 2009, 27, 1. [Google Scholar]
- Qiu, C.; Chau, K.; Liu, C.; Chan, C. Overview of wireless power transfer for electric vehicle charging. In Proceedings of the 2013 world electric vehicle symposium and exhibition (EVS27), Barcelona, Spain, 17–20 November 2013; pp. 1–9. [Google Scholar] [CrossRef]
- Hanazawa, M.; Ohira, T. Power transfer for a running automobile. In Proceedings of the 2011 IEEE MTT-S international microwave workshop series on innovative wireless power transmission: Technologies, systems, and applications, Kyoto, Japan, 12–13 May 2011; pp. 77–80. [Google Scholar] [CrossRef]
- Mohamed, A.; Mohammed, O.A. Physics-Based Co-Simulation Platform with Analytical and Experimental Verification for Bidirectional IPT System in EV Applications. IEEE Trans. Veh. Technol. 2017, 67, 275–284. [Google Scholar] [CrossRef]
- Budhia, M.; Covic, G.A.; Boys, J.T. Design and Optimization of Circular Magnetic Structures for Lumped Inductive Power Transfer Systems. IEEE Trans. Power Electron. 2011, 26, 3096–3108. [Google Scholar] [CrossRef]
- Lu, X.; Wang, P.; Niyato, D.; Kim, D.I.; Han, Z. Wireless charging technologies: Fundamentals, standards, and network applications. IEEE Commun. Surv. Tutor. 2015, 18, 1413–1452. [Google Scholar] [CrossRef]
- Covic, G.A.; Boys, J.T. Inductive power transfer. Proc. IEEE 2013, 101, 1276–1289. [Google Scholar] [CrossRef]
- Covic, G.A.; Boys, J.T. Modern Trends in Inductive Power Transfer for Transportation Applications. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 28–41. [Google Scholar] [CrossRef]
- Panchal, C.; Stegen, S.; Lu, J.-W. Review of static and dynamic wireless electric vehicle charging system. Eng. Sci. Technol. Int. J. 2018, 21, 922–937. [Google Scholar] [CrossRef]
- Liu, C.; Hu, A.P. Steady state analysis of a capacitively coupled contactless power transfer system. In Proceedings of the 2009 IEEE Energy Conversion Congress and Exposition, San Jose, CA, USA, 20–24 September 2009; pp. 3233–3238. [Google Scholar] [CrossRef]
- Kline, M.; Izyumin, I.; Boser, B.; Sanders, S. Capacitive power transfer for contactless charging. In Proceedings of the 2011 Twenty-Sixth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Fort Worth, TX, USA, 6–11 March 2011; pp. 1398–1404. [Google Scholar] [CrossRef]
- Liu, C. Fundamental Study on Capacitively Coupled Contactless Power Transfer Technology; University of Auckland: Auckland, New Zealand, 2011. [Google Scholar]
- Shinohara, N. Beam Efficiency of Wireless Power Transmission via Radio Waves from Short Range to Long Range. J. Electromagn. Eng. Sci. 2010, 10, 224–230. [Google Scholar] [CrossRef]
- Matsumoto, H. Research on solar power satellites and microwave power transmission in Japan. IEEE Microw. Mag. 2002, 3, 36–45. [Google Scholar] [CrossRef]
- Chau, K.T.; Zhang, D.; Jiang, J.Z.; Liu, C.; Zhang, Y. Design of a Magnetic-Geared Outer-Rotor Permanent-Magnet Brushless Motor for Electric Vehicles. IEEE Trans. Magn. 2007, 43, 2504–2506. [Google Scholar] [CrossRef]
- Tseng, V.F.-G.; Bedair, S.S.; Lazarus, N. Acoustic wireless power transfer with receiver array for enhanced performance. In Proceedings of the 2017 IEEE Wireless Power Transfer Conference (WPTC), Taipei, Taiwan, 10–12 May 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Roes, M. Exploring the Potential of Acoustic Energy Transfer. Ph.D. Thesis, Technische Universiteit Eindhoven, Eindhoven, The Netherlands, 2015. [Google Scholar]
- Mohamed, A.A.S.; Meintz, A.; Schrafel, P.; Calabro, A. In-Vehicle Assessment of Human Exposure to EMFs from 25-kW WPT System Based on Near-Field Analysis. In Proceedings of the 2018 IEEE Vehicle Power and Propulsion Conference (VPPC), Chicago, IL, USA, 27–30 August 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Mohamed, A.A.S.; Meintz, A.; Zhu, L. System Design and Optimization of In-Route Wireless Charging Infrastructure for Shared Automated Electric Vehicles. IEEE Access 2019, 7, 79968–79979. [Google Scholar] [CrossRef]
- Mohamed, A.A.; Shaier, A.A.; Metwally, H.; Selem, S.I. Interoperability of the universal WPT3 transmitter with different receivers for electric vehicle inductive charger. eTransportation 2020, 6, 100084. [Google Scholar] [CrossRef]
- SAE. Wireless Power Transfer for Light-Duty Plug-In/Electric Vehicles and Alignment Methodology. SAE J2954 TIR; SAE: Warrendale, PA, USA, 2017. [Google Scholar]
- Patil, D.; McDonough, M.K.; Miller, J.M.; Fahimi, B.; Balsara, P.T. Wireless Power Transfer for Vehicular Applications: Overview and Challenges. IEEE Trans. Transp. Electrif. 2018, 4, 3–37. [Google Scholar] [CrossRef]
- Wang, S.; Dorrell, D. Review of wireless charging coupler for electric vehicles. In Proceedings of the IECON 2013-39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 7274–7279. [Google Scholar] [CrossRef]
- Mohamed, A.A.S.; Lashway, C.R.; Mohammed, O. Modeling and Feasibility Analysis of Quasi-Dynamic WPT System for EV Applications. IEEE Trans. Transp. Electrif. 2017, 3, 343–353. [Google Scholar] [CrossRef]
- Hutin, M.; Leblanc, M. Transformer System for Electric Railways. U.S. Patent US527857A, 23 October 1894. Available online: https://patents.google.com/patent/US527857A/en (accessed on 14 January 2021).
- Choi, S.Y.; Rim, C.T. Recent progress in developments of on-line electric vehicles. In Proceedings of the 2015 6th International Conference on Power Electronics Systems and Applications (PESA), Hong Kong, China, 15–17 December 2015; pp. 1–8. [Google Scholar] [CrossRef]
- Bolger, J.G. Supplying Power to Vehicles. October 1975. Available online: https://patents.google.com/patent/US3914562A/en (accessed on 24 June 2022).
- Bolger, J.; Kirsten, F.; Ng, L. Inductive power coupling for an electric highway system. In Proceedings of the 28th IEEE Vehicular Technology Conference, Denver, Colorado, 22–24 March 1978; pp. 137–144. [Google Scholar] [CrossRef]
- Zell, C.; Bolger, J. Development of an engineering prototype of a roadway powered electric transit vehicle system: A public/private sector program. In Proceedings of the 32nd IEEE Vehicular Technology Conference, San Diego, CA, USA, 23–26 March 1982; pp. 435–438. [Google Scholar] [CrossRef]
- Lashkari, K.; Shladover, S.E.; Lechner, E.H. Inductive power transfer to an electric vehicle. In Proceedings of the EVS-8: The Eight International Electric Vehicle Symposium, Washington, DC, USA, 20–23 October 1986. [Google Scholar]
- Lechner, E.; Shladover, S.E. Roadway Powered Electric Vehicle: An All-electric Hybrid System. In Proceedings of the 8th International Electric Vehicle Symposium, No. CONF-8610122, Washington, DC, USA, 20–23 October 1986. [Google Scholar]
- Shladover, S.E. Systems engineering of the roadway powered electric vehicle technology. In Proceedings of the 9th International Electric Vehicle Symposium, No. 88-072, Toronto, ON, Canada, 13–16 November 1988. [Google Scholar]
- Bolger, J. Urban electric transportation systems: The role of magnetic power transfer. In Proceedings of the WESCON’94, Anaheim, CA, USA, 27–29 September 1994. [Google Scholar]
- Empey, D.; Technology, I.S.C.; Transit, P. Roadway Powered Electric Vehicle Project: Track Construction and Testing Program, Phase 3D; University of California: Berkeley, CA, USA, 1994. [Google Scholar]
- Takanashi, H.; Sato, Y.; Kaneko, Y.; Abe, S.; Yasuda, T. A large air gap 3 kW wireless power transfer system for electric vehicles. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15–20 September 2012; pp. 269–274. [Google Scholar] [CrossRef]
- Barth, D.; Klaus, B.; Leibfried, T. Litz wire design for wireless power transfer in electric vehicles. In Proceedings of the 2017 IEEE Wireless Power Transfer Conference (WPTC), Taipei, Taiwan, 10–12 May 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Rossmanith, H.; Doebroenti, M.; Albach, M.; Exner, D. Measurement and Characterization of High Frequency Losses in Nonideal Litz Wires. IEEE Trans. Power Electron. 2011, 26, 3386–3394. [Google Scholar] [CrossRef]
- Mizuno, T.; Ueda, T.; Yachi, S.; Ohtomo, R.; Goto, Y. Dependence of Efficiency on Wire Type and Number of Strands of Litz Wire for Wireless Power Transfer of Magnetic Resonant Coupling. IEEJ J. Ind. Appl. 2014, 3, 35–40. [Google Scholar] [CrossRef][Green Version]
- Shinagawa, H.; Suzuki, T.; Noda, M.; Shimura, Y.; Enoki, S.; Mizuno, T. Theoretical Analysis of AC Resistance in Coil Using Magnetoplated Wire. IEEE Trans. Magn. 2009, 45, 3251–3259. [Google Scholar] [CrossRef]
- Konno, Y.; Yamamoto, T.; Chai, Y.; Tomoya, D.; Bu, Y.; Mizuno, T. Basic Characterization of Magnetocoated Wire Fabricated Using Spray Method. IEEE Trans. Magn. 2017, 53, 1–7. [Google Scholar] [CrossRef]
- Yamamoto, T.; Konno, Y.; Sugimura, K.; Sato, T.; Bu, Y.; Mizuno, T. Loss Reduction of LLC Resonant Converter using Magnetocoated Wire. IEEJ J. Ind. Appl. 2019, 8, 51–56. [Google Scholar] [CrossRef]
- Jawad, A.M.; Nordin, R.; Gharghan, S.K.; Jawad, H.M.; Ismail, M.; Abu-AlShaeer, M.J. Single-Tube and Multi-Turn Coil Near-Field Wireless Power Transfer for Low-Power Home Appliances. Energies 2018, 11, 1969. [Google Scholar] [CrossRef]
- Pantic, Z.; Lukic, S. Computationally-Efficient, Generalized Expressions for the Proximity-Effect in Multi-Layer, Multi-Turn Tubular Coils for Wireless Power Transfer Systems. IEEE Trans. Magn. 2013, 49, 5404–5416. [Google Scholar] [CrossRef]
- Sekiya, N.; Monjugawa, Y. A Novel REBCO Wire Structure That Improves Coil Quality Factor in MHz Range and its Effect on Wireless Power Transfer Systems. IEEE Trans. Appl. Supercond. 2017, 27, 1–5. [Google Scholar] [CrossRef]
- Sullivan, C.R. Aluminum Windings and Other Strategies forHigh-Frequency Magnetics Design in anEra of High Copper and Energy Costs. IEEE Trans. Power Electron. 2008, 23, 2044–2051. [Google Scholar] [CrossRef]
- Jeong, S.; Song, J.; Kim, H.; Lee, S.; Kim, J.; Lee, J.; Kim, Y.; Kim, S.; Song, J. Design and analysis of wireless power transfer system using flexible coil and shielding material on smartwatch strap. In Proceedings of the 2017 IEEE Wireless Power Transfer Conference (WPTC), Taipei, Taiwan, 10–12 May 2017; pp. 1–3. [Google Scholar] [CrossRef]
- Esguerra, M.; Lucke, R. Application and Production of a Magnetic Product. US6696638B2, 24 February 2004. Available online: https://patents.google.com/patent/US6696638B2/en (accessed on 24 October 2019).
- Sun, X.; Zheng, Y.; Peng, X.; Li, X.; Zhang, H. Parylene-based 3D high performance folded multilayer inductors for wireless power transmission in implanted applications. Sens. Actuators A Phys. 2014, 208, 141–151. [Google Scholar] [CrossRef]
- Delgado, A.; Oliver, J.A.; Cobos, J.A.; Rodriguez, J.; Jimenez, A. Optimized Design for Wireless Coil for Electric Vehicles Based on The Use of Magnetic Nano-articles. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 24–28 March 2019; pp. 1515–1520. [Google Scholar] [CrossRef]
- International Commission on Non-Ionizing Radiation Protection (ICNIRP). Guidelines for Limiting Exposure to Time-Varying Electric and Magnetic Fields (1 Hz to 100 KHz). Health Phys. 2010, 99, 818–836. [Google Scholar] [CrossRef]
- (ICNIRP) International Commission on Non-Ionizing Radiation Protection. Guidelines for limiting exposure to time-varying electric, magnetic, and electromagnetic fields (up to 300 GHz). Health Phys. 1998, 74, 494–522. [Google Scholar]
- Mohamed, A.A.S.; Shaier, A.A. Shielding Techniques of IPT System for Electric Vehicles’ Stationary Charging. In Electric Vehicle Integration in a Smart Microgrid Environment; CRC Press: Boca Raton, FL, USA, 2021; pp. 279–293. [Google Scholar] [CrossRef]
- Choi, S.Y.; Gu, B.W.; Lee, S.W.; Lee, W.Y.; Huh, J.; Rim, C.T. Generalized Active EMF Cancel Methods for Wireless Electric Vehicles. IEEE Trans. Power Electron. 2013, 29, 5770–5783. [Google Scholar] [CrossRef]
- Kim, S.; Park, H.-H.; Kim, J.; Kim, J.; Ahn, S. Design and Analysis of a Resonant Reactive Shield for a Wireless Power Electric Vehicle. IEEE Trans. Microw. Theory Tech. 2014, 62, 1057–1066. [Google Scholar] [CrossRef]
- Hui, S.Y.R.; Zhong, W.; Lee, C.K. A Critical Review of Recent Progress in Mid-Range Wireless Power Transfer. IEEE Trans. Power Electron. 2013, 29, 4500–4511. [Google Scholar] [CrossRef]
- Zhang, J.; Yuan, X.; Wang, C.; He, Y. Comparative Analysis of Two-Coil and Three-Coil Structures for Wireless Power Transfer. IEEE Trans. Power Electron. 2016, 32, 341–352. [Google Scholar] [CrossRef]
- Arakawa, T.; Goguri, S.; Krogmeier, J.V.; Kruger, A.; Love, D.J.; Mudumbai, R.; Swabey, M.A. Optimizing Wireless Power Transfer from Multiple Transmit Coils. IEEE Access 2018, 6, 23828–23838. [Google Scholar] [CrossRef]
- Bi, Z.; Kan, T.; Mi, C.C.; Zhang, Y.; Zhao, Z.; Keoleian, G.A. A review of wireless power transfer for electric vehicles: Prospects to enhance sustainable mobility. Appl. Energy 2016, 179, 413–425. [Google Scholar] [CrossRef]
- Lu, F.; Zhang, H.; Hofmann, H.; Mi, C.C. A Dynamic Charging System with Reduced Output Power Pulsation for Electric Vehicles. IEEE Trans. Ind. Electron. 2016, 63, 6580–6590. [Google Scholar] [CrossRef]
- Suh, N.; Cho, D.; Rim, C. Design of On-Line Electric Vehicle (OLEV). In Global Product Development; Springer: Berlin/Heidelberg, Germany, 2011; pp. 3–8. [Google Scholar] [CrossRef]
- Sun, L.; Ma, D.; Tang, H. A review of recent trends in wireless power transfer technology and its applications in electric vehicle wireless charging. Renew. Sustain. Energy Rev. 2018, 91, 490–503. [Google Scholar] [CrossRef]
- Ko, Y.D.; Jang, Y.J. The Optimal System Design of the Online Electric Vehicle Utilizing Wireless Power Transmission Technology. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1255–1265. [Google Scholar] [CrossRef]
- García-Vázquez, C.A.; Llorens-Iborra, F.; Fernández-Ramírez, L.M.; Sánchez-Sainz, H.; Jurado, F. Comparative study of dynamic wireless charging of electric vehicles in motorway, highway and urban stretches. Energy 2017, 137, 42–57. [Google Scholar] [CrossRef]
- Choi, S.Y.; Gu, B.W.; Jeong, S.Y.; Rim, C.T. Advances in Wireless Power Transfer Systems for Roadway-Powered Electric Vehicles. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 3, 18–36. [Google Scholar] [CrossRef]
- Mi, C.C.; Buja, G.; Choi, S.Y.; Rim, C.T. Modern Advances in Wireless Power Transfer Systems for Roadway Powered Electric Vehicles. IEEE Trans. Ind. Electron. 2016, 63, 6533–6545. [Google Scholar] [CrossRef]
- Huh, J.; Lee, S.W.; Lee, W.Y.; Cho, G.H.; Rim, C.T. Narrow-Width Inductive Power Transfer System for Online Electrical Vehicles. IEEE Trans. Power Electron. 2011, 26, 3666–3679. [Google Scholar] [CrossRef]
- Choi, S.; Huh, J.; Lee, W.Y.; Lee, S.W.; Rim, C.T. New Cross-Segmented Power Supply Rails for Roadway-Powered Electric Vehicles. IEEE Trans. Power Electron. 2013, 28, 5832–5841. [Google Scholar] [CrossRef]
- Miller, J.M.; Jones, P.; Li, J.-M.; Onar, O.C. ORNL Experience and Challenges Facing Dynamic Wireless Power Charging of EV’s. IEEE Circuits Syst. Mag. 2015, 15, 40–53. [Google Scholar] [CrossRef]
- Gil, A.; Taiber, J. A Literature Review in Dynamic Wireless Power Transfer for Electric Vehicles: Technology and Infrastructure Integration Challenges. In Sustainable Automotive Technologies; Springer: Cham, Switzerland, 2013; pp. 289–298. [Google Scholar] [CrossRef]
- Lee, K.; Pantic, Z.; Lukic, S. Reflexive Field Containment in Dynamic Inductive Power Transfer Systems. IEEE Trans. Power Electron. 2013, 29, 4592–4602. [Google Scholar] [CrossRef]
- Song, K.; Koh, K.E.; Zhu, C.; Jiang, J.; Wang, C.; Huang, X. A Review of Dynamic Wireless Power Transfer for In-Motion Electric Vehicles. In Wireless Power Transfer-Fundamentals and Technologies; BoD–Books on Demand: Norderstedt, Germany, 2016; pp. 109–128. [Google Scholar] [CrossRef]
- Chen, L.; Nagendra, G.; Boys, J.T.; Covic, G.A. Double-Coupled Systems for IPT Roadway Applications. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 3, 37–49. [Google Scholar] [CrossRef]
- Miller, J.M.; Onar, O.C.; White, C.; Campbell, S.; Coomer, C.; Seiber, L.; Sepe, R.; Steyerl, A. Demonstrating Dynamic Wireless Charging of an Electric Vehicle: The Benefit of Electrochemical Capacitor Smoothing. IEEE Power Electron. Mag. 2014, 1, 12–24. [Google Scholar] [CrossRef]
- Shin, S.; Shin, J.; Kim, Y.; Lee, S.; Song, B.; Jung, G.; Jeon, S. Hybrid inverter segmentation control for Online Electric Vehicle. In Proceedings of the 2012 IEEE International Electric Vehicle Conference, Greenville, SC, USA, 4–8 March 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Nagendra, G.; Chen, L.; Covic, G.A.; Boys, J.T. Detection of EVs on IPT Highways. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 584–597. [Google Scholar] [CrossRef]
- Jang, G.C.; Jeong, S.Y.; Kwak, H.G.; Rim, C.T. Metal object detection circuit with non-overlapped coils for wireless EV chargers. In Proceedings of the 2016 IEEE 2nd Annual Southern Power Electronics Conference (SPEC), Auckland, New Zealand, 5–8 December 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Simonazzi, M.; Sandrolini, L.; Mariscotti, A. Receiver–Coil Location Detection in a Dynamic Wireless Power Transfer System for Electric Vehicle Charging. Sensors 2022, 22, 2317. [Google Scholar] [CrossRef]
- Deng, Q.; Liu, J.; Czarkowski, D.; Bojarski, M.; Chen, J.; Zhou, H.; Hu, W. Edge position detection of on-line vehicles with segmental wireless power supply. IEEE Trans. Veh. Technol. 2016, 66, 3610–3621. [Google Scholar] [CrossRef]
- Beh, H.Z.Z.; Covic, G.A.; Boys, J.T. Wireless Fleet Charging System for Electric Bicycles. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 3, 75–86. [Google Scholar] [CrossRef]
- Nagendra, G.R.; Boys, J.T.; Covic, G.A.; Riar, B.S.; Sondhi, A. Design of a double coupled IPT EV highway. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 4606–4611. [Google Scholar] [CrossRef]
- Tan, L.; Zhao, W.; Liu, H.; Li, J.; Huang, X. Design and Optimization of Ground-Side Power Transmitting Coil Parameters for EV Dynamic Wireless Charging System. IEEE Access 2020, 8, 74595–74604. [Google Scholar] [CrossRef]
- Buja, G.; Bertoluzzo, M.; Dashora, H.K. Lumped Track Layout Design for Dynamic Wireless Charging of Electric Vehicles. IEEE Trans. Ind. Electron. 2016, 63, 6631–6640. [Google Scholar] [CrossRef]
- Sampath, J.P.K.; Vilathgamuwa, D.M.; Alphones, A. Efficiency Enhancement for Dynamic Wireless Power Transfer System with Segmented Transmitter Array. IEEE Trans. Transp. Electrif. 2015, 2, 76–85. [Google Scholar] [CrossRef]
- Zhang, W.; Wong, S.-C.; Tse, C.K.; Chen, Q. An Optimized Track Length in Roadway Inductive Power Transfer Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 598–608. [Google Scholar] [CrossRef]
- Wang, H.; Cheng, K. An Improved and Integrated Design of Segmented Dynamic Wireless Power Transfer for Electric Vehicles. Energies 2021, 14, 1975. [Google Scholar] [CrossRef]
- Li, X.; Hu, J.; Wang, H.; Dai, X.; Sun, Y. A New Coupling Structure and Position Detection Method for Segmented Control Dynamic Wireless Power Transfer Systems. IEEE Trans. Power Electron. 2020, 35, 6741–6745. [Google Scholar] [CrossRef]
- Zhu, Q.; Wang, L.; Guo, Y.; Liao, C.; Li, F. Applying LCC Compensation Network to Dynamic Wireless EV Charging System. IEEE Trans. Ind. Electron. 2016, 63, 6557–6567. [Google Scholar] [CrossRef]
- Zhou, S.; Mi, C.C. Multi-Paralleled LCC Reactive Power Compensation Networks and Their Tuning Method for Electric Vehicle Dynamic Wireless Charging. IEEE Trans. Ind. Electron. 2015, 63, 6546–6556. [Google Scholar] [CrossRef]
- Feng, H.; Cai, T.; Duan, S.; Zhao, J.; Zhang, X.; Chen, C. An LCC-Compensated Resonant Converter Optimized for Robust Reaction to Large Coupling Variation in Dynamic Wireless Power Transfer. IEEE Trans. Ind. Electron. 2016, 63, 6591–6601. [Google Scholar] [CrossRef]
- Onar, O.C.; Campbell, S.L.; Seiber, L.E.; White, C.P.; Chinthavali, M. A high-power wireless charging system development and integration for a Toyota RAV4 electric vehicle. In Proceedings of the 2016 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 27–29 June 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Shin, J.; Shin, S.; Kim, Y.; Ahn, S.; Lee, S.; Jung, G.; Jeon, S.-J.; Cho, D.-H. Design and Implementation of Shaped Magnetic-Resonance-Based Wireless Power Transfer System for Roadway-Powered Moving Electric Vehicles. IEEE Trans. Ind. Electron. 2013, 61, 1179–1192. [Google Scholar] [CrossRef]
- Zaheer, A.; Covic, G.A.; Kacprzak, D. A Bipolar Pad in a 10-kHz 300-W Distributed IPT System for AGV Applications. IEEE Trans. Ind. Electron. 2013, 61, 3288–3301. [Google Scholar] [CrossRef]
- Li, Z.; Tang, M.; Xie, B.; Zhu, Y.; Guo, X.; Sun, H. A Study of Magnetic Coupling Characteristics of Dual Receiver Coil for Dynamic Wireless Power Transfer. IEEE Access 2022, 10, 70516–70525. [Google Scholar] [CrossRef]
- Fu, M.; Zhang, T.; Ma, C.; Zhu, X. Efficiency and Optimal Loads Analysis for Multiple-Receiver Wireless Power Transfer Systems. IEEE Trans. Microw. Theory Tech. 2015, 63, 801–812. [Google Scholar] [CrossRef]
- Fu, M.; Zhang, T.; Zhu, X.; Luk, P.C.-K.; Ma, C. Compensation of Cross Coupling in Multiple-Receiver Wireless Power Transfer Systems. IEEE Trans. Ind. Inform. 2016, 12, 474–482. [Google Scholar] [CrossRef]
- Diekhans, T.; De Doncker, R.W. A Dual-Side Controlled Inductive Power Transfer System Optimized for Large Coupling Factor Variations and Partial Load. IEEE Trans. Power Electron. 2015, 30, 6320–6328. [Google Scholar] [CrossRef]
- Pakhaliuk, B.; Husev, O.; Shevchenko, V.; Veligorskyi, O.; Kroics, K. Novel Inductive Power Transfer Approach Based on Z-Source Network with Compensation Circuit. In Proceedings of the 2018 IEEE 38th International Conference on Electronics and Nanotechnology (ELNANO), Kyiv, Ukraine, 24–26 April 2018; pp. 699–704. [Google Scholar] [CrossRef]
- Xia, C.; Liu, Y.; Lin, K.; Xie, G. Model and Frequency Control for Three-Phase Wireless Power Transfer System. Math. Probl. Eng. 2016, 2016, 3853146. [Google Scholar] [CrossRef]
- Khandaker, M.R.A.; Wong, K.-K.; Zhang, Y.; Zheng, Z. Probabilistically Robust SWIPT for Secrecy MISOME Systems. IEEE Trans. Inf. Forensics Secur. 2016, 12, 211–226. [Google Scholar] [CrossRef]
- Bosshard, R.; Kolar, J.W. Inductive power transfer for electric vehicle charging: Technical challenges and tradeoffs. IEEE Power Electron. Mag. 2016, 3, 22–30. [Google Scholar] [CrossRef]
- Rim, c. Practical Design of Wireless Electric Vehicles: Dynamic & Stationary Charging Technologies. 2017. [Google Scholar]
- Tomita, K.; Shinoda, R.; Kuroda, T.; Ishikuro, H. 1-W 3.3–16.3-V Boosting Wireless Power Transfer Circuits with Vector Summing Power Controller. IEEE J. Solid-State Circuits 2012, 47, 2576–2585. [Google Scholar] [CrossRef]
- Hui, S.; Ho, W. A New Generation of Universal Contactless Battery Charging Platform for Portable Consumer Electronic Equipment. IEEE Trans. Power Electron. 2005, 20, 620–627. [Google Scholar] [CrossRef]
- Song, B.-M.; Kratz, R.; Gürol, S. Contactless inductive power pickup system for Maglev applications. In Proceedings of the Conference Record of the 2002 IEEE Industry Applications Conference. 37th IAS Annual Meeting (Cat. No.02CH37344), Pittsburgh, PA, USA, 13–18 October 2002; Volume 3, pp. 1586–1591. [Google Scholar] [CrossRef]
- Madawala, U.K.; Thrimawithana, D.J. A Bidirectional Inductive Power Interface for Electric Vehicles in V2G Systems. IEEE Trans. Ind. Electron. 2011, 58, 4789–4796. [Google Scholar] [CrossRef]
- Han, H.; Mao, Z.; Zhu, Q.; Su, M.; Hu, A.P. A 3D Wireless Charging Cylinder with Stable Rotating Magnetic Field for Multi-Load Application. IEEE Access 2019, 7, 35981–35997. [Google Scholar] [CrossRef]
- Hao, H.; Covic, G.A.; Boys, J.T. A Parallel Topology for Inductive Power Transfer Power Supplies. IEEE Trans. Power Electron. 2013, 29, 1140–1151. [Google Scholar] [CrossRef]
- Vu, V.-B.; Phan, V.-T.; Dahidah, M.; Pickert, V. Multiple Output Inductive Charger for Electric Vehicles. IEEE Trans. Power Electron. 2018, 34, 7350–7368. [Google Scholar] [CrossRef]
- Mude, K.N.; Aditya, K. Comprehensive review and analysis of two-element resonant compensation topologies for wireless inductive power transfer systems. Chin. J. Electr. Eng. 2019, 5, 14–31. [Google Scholar] [CrossRef]
- Keeling, N.A.; Covic, G.A.; Boys, J.T. A Unity-Power-Factor IPT Pickup for High-Power Applications. IEEE Trans. Ind. Electron. 2009, 57, 744–751. [Google Scholar] [CrossRef]
- Wang, C.-S.; Stielau, O.; Covic, G. Design Considerations for a Contactless Electric Vehicle Battery Charger. IEEE Trans. Ind. Electron. 2005, 52, 1308–1314. [Google Scholar] [CrossRef]
- García, X.D.T.; Vázquez, J.; Roncero-Sánchez, P. Design, implementation issues and performance of an inductive power transfer system for electric vehicle chargers with series–series compensation. IET Power Electron. 2015, 8, 1920–1930. [Google Scholar] [CrossRef]
- Jegadeesan, R.; Guo, Y.-X. Topology Selection and Efficiency Improvement of Inductive Power Links. IEEE Trans. Antennas Propag. 2012, 60, 4846–4854. [Google Scholar] [CrossRef]
- Liu, F.; Yang, Y.; Jiang, D.; Ruan, X.; Chen, X. Modeling and Optimization of Magnetically Coupled Resonant Wireless Power Transfer System with Varying Spatial Scales. IEEE Trans. Power Electron. 2016, 32, 3240–3250. [Google Scholar] [CrossRef]
- Zhang, W.; Wong, S.-C.; Tse, C.K.; Chen, Q. Analysis and Comparison of Secondary Series- and Parallel-Compensated Inductive Power Transfer Systems Operating for Optimal Efficiency and Load-Independent Voltage-Transfer Ratio. IEEE Trans. Power Electron. 2013, 29, 2979–2990. [Google Scholar] [CrossRef]
- Lu, F.; Hofmann, H.; Deng, J.; Mi, C. Output power and efficiency sensitivity to circuit parameter variations in double-sided LCC-compensated wireless power transfer system. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 597–601. [Google Scholar] [CrossRef]
- Samanta, S.; Rathore, A.K.; Sahoo, S.K. Current-fed full-bridge and half-bridge topologies with CCL transmitter and LC receiver tanks for wireless inductive power transfer application. In Proceedings of the 2016 IEEE Region 10 Conference (TENCON), Marina Bay Sands, Singapore, 22–26 November 2016; pp. 756–761. [Google Scholar] [CrossRef]
- Liu, C.; Ge, S.; Guo, Y.; Li, H.; Cai, G. Double-LCL resonant compensation network for electric vehicles wireless power transfer: Experimental study and analysis. IET Power Electron. 2016, 9, 2262–2270. [Google Scholar] [CrossRef]
- Liu, F.; Zhang, Y.; Chen, K.; Zhao, Z.; Yuan, L. A comparative study of load characteristics of resonance types in wireless transmission systems. In Proceedings of the 2016 Asia-Pacific International Symposium on Electromagnetic Compatibility (APEMC), Shenzhen, China, 17–21 May 2016; Volume 1, pp. 203–206. [Google Scholar]
- Wang, Y.; Yao, Y.; Liu, X.; Xu, D. S/CLC Compensation Topology Analysis and Circular Coil Design for Wireless Power Transfer. IEEE Trans. Transp. Electrif. 2017, 3, 496–507. [Google Scholar] [CrossRef]
- Park, M.; Nguyen, V.T.; Yu, S.-D.; Yim, S.-W.; Park, K.; Min, B.D.; Kim, S.-D.; Cho, J.G. A study of wireless power transfer topologies for 3.3 kW and 6.6 kW electric vehicle charging infrastructure. In Proceedings of the 2016 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Busan, Korea, 1–4 June 2016; pp. 689–692. [Google Scholar] [CrossRef]
- Shevchenko, V.; Husev, O.; Strzelecki, R.; Pakhaliuk, B.; Poliakov, N.; Strzelecka, N. Compensation Topologies in IPT Systems: Standards, Requirements, Classification, Analysis, Comparison and Application. IEEE Access 2019, 7, 120559–120580. [Google Scholar] [CrossRef]
- Khaligh, A.; Dusmez, S. Comprehensive Topological Analysis of Conductive and Inductive Charging Solutions for Plug-In Electric Vehicles. IEEE Trans. Veh. Technol. 2012, 61, 3475–3489. [Google Scholar] [CrossRef]
- Fernandes, R.D.; Matos, J.N.; Carvalho, N.B. Constructive combination of resonant magnetic coupling and resonant electrical coupling. In Proceedings of the 2015 IEEE Wireless Power Transfer Conference (WPTC), Boulder, CO, USA, 13–15 May 2015; pp. 1–3. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, Z.; Chen, K. Frequency Decrease Analysis of Resonant Wireless Power Transfer. IEEE Trans. Power Electron. 2013, 29, 1058–1063. [Google Scholar] [CrossRef]
- Grajales, L.; Lee, F. Control system design and small-signal analysis of a phase-shift-controlled series-resonant inverter for induction heating. In Proceedings of the PESC ’95—Power Electronics Specialist Conference, Atlanta, GA, USA, 18–22 June 1995; Volume 1, pp. 450–456. [Google Scholar] [CrossRef]
- Casson, A.J.; Rodriguez-Villegas, E. A Review and Modern Approach to LC Ladder Synthesis. J. Low Power Electron. Appl. 2011, 1, 20–44. [Google Scholar] [CrossRef]
- Bertoluzzo, M.; Jha, R.K.; Buja, G. Series-series resonant IPT system analysis under frequency mismatch. In Proceedings of the IECON 2015—41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; pp. 000439–000444. [Google Scholar] [CrossRef]
- Okasili, I.; Elkhateb, A.; Littler, T. A Review of Wireless Power Transfer Systems for Electric Vehicle Battery Charging with a Focus on Inductive Coupling. Electronics 2022, 11, 1355. [Google Scholar] [CrossRef]
- Pries, J.; Galigekere, V.P.N.; Onar, O.C.; Su, G.-J. A 50-kW Three-Phase Wireless Power Transfer System Using Bipolar Windings and Series Resonant Networks for Rotating Magnetic Fields. IEEE Trans. Power Electron. 2019, 35, 4500–4517. [Google Scholar] [CrossRef]
- Rehman, M.; Nallagownden, P.; Baharudin, Z. Efficiency investigation of SS and SP compensation topologies for wireless power transfer. Int. J. Power Electron. Drive Syst. (IJPEDS) 2019, 10, 2157–2164. [Google Scholar] [CrossRef]
- Moradewicz, A.J.; Kazmierkowski, M.P. Contactless Energy Transfer System With FPGA-Controlled Resonant Converter. IEEE Trans. Ind. Electron. 2010, 57, 3181–3190. [Google Scholar] [CrossRef]
- Lee, S.-H.; Lorenz, R.D. Development and Validation of Model for 95%-Efficiency 220-W Wireless Power Transfer Over a 30-cm Air Gap. IEEE Trans. Ind. Appl. 2011, 47, 2495–2504. [Google Scholar] [CrossRef]
- Tsai, J.-S.; Hu, J.-S.; Chen, S.-L.; Huang, X. Directional antenna design for wireless power transfer system in electric scooters. Adv. Mech. Eng. 2016, 8, 1687814016632693. [Google Scholar] [CrossRef]
- Li, H.; Li, J.; Wang, K.; Chen, W.; Yang, X. A Maximum Efficiency Point Tracking Control Scheme for Wireless Power Transfer Systems Using Magnetic Resonant Coupling. IEEE Trans. Power Electron. 2014, 30, 3998–4008. [Google Scholar] [CrossRef]
- Zahid, Z.U.; Zheng, C.; Chen, R.; Faraci, W.E.; Lai, J.-S.J.; Senesky, M.; Anderson, D. Design and control of a single-stage large air-gapped transformer isolated battery charger for wide-range output voltage for EV applications. In Proceedings of the 2013 IEEE Energy Conversion Congress and Exposition, Denver, CO, USA, 15–19 September 2013; pp. 5481–5487. [Google Scholar] [CrossRef]
- Wang, C.-S.; Covic, G.; Stielau, O. Power Transfer Capability and Bifurcation Phenomena of Loosely Coupled Inductive Power Transfer Systems. IEEE Trans. Ind. Electron. 2004, 51, 148–157. [Google Scholar] [CrossRef]
- Bosshard, R.; Kolar, J.W.; Muhlethaler, J.; Stevanovic, I.; Wunsch, B.; Canales, F. Modeling and η-α-Pareto Optimization of Inductive Power Transfer Coils for Electric Vehicles. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 3, 50–64. [Google Scholar] [CrossRef]
- Villa, J.L.; Sallan, J.; Osorio, J.F.S.; Llombart, A. High-Misalignment Tolerant Compensation Topology for ICPT Systems. IEEE Trans. Ind. Electron. 2012, 59, 945–951. [Google Scholar] [CrossRef]
- Xia, C.; Zhou, Y.; Zhang, J.; Li, C. Comparison of Power Transfer Characteristics between CPT and IPT System and Mutual Inductance Optimization for IPT System. J. Comput. 2012, 7, 2734–2741. [Google Scholar] [CrossRef]
- Fu, M.; Tang, Z.; Ma, C. Analysis and Optimized Design of Compensation Capacitors for a Megahertz WPT System Using Full-Bridge Rectifier. IEEE Trans. Ind. Inform. 2018, 15, 95–104. [Google Scholar] [CrossRef]
- Hong, H.; Yang, D.; Won, S. The Analysis for Selecting Compensating Capacitances of Two-Coil Resonant Wireless Power Transfer System. In Proceedings of the 2017 IEEE International Conference on Energy Internet (ICEI), Beijing, China, 15 January 2017; pp. 220–225. [Google Scholar] [CrossRef]
- Sallan, J.; Villa, J.L.; Llombart, A.; Sanz, J.F. Optimal Design of ICPT Systems Applied to Electric Vehicle Battery Charge. IEEE Trans. Ind. Electron. 2009, 56, 2140–2149. [Google Scholar] [CrossRef]
- Boys, J.; Covic, G.; Green, A. Stability and control of inductively coupled power transfer systems. IEE Proc.-Electr. Power Appl. 2000, 147, 37–43. [Google Scholar] [CrossRef]
- Stielau, O.; Covic, G. Design of loosely coupled inductive power transfer systems. In Proceedings of the 2000 International Conference on Power System Technology. Proceedings (Cat. No.00EX409), Perth, WA, Australia, 4–7 December 2000; Volume 1, pp. 85–90. [Google Scholar] [CrossRef]
- Zhang, W.; Mi, C.C. Compensation Topologies of High-Power Wireless Power Transfer Systems. IEEE Trans. Veh. Technol. 2015, 65, 4768–4778. [Google Scholar] [CrossRef]
- Aditya, K.; Williamson, S.S. Design considerations for loosely coupled inductive power transfer (IPT) system for electric vehicle battery charging—A comprehensive review. In Proceedings of the 2014 IEEE Transportation Electrification Conference and Expo (ITEC), Beijing, China, 31 August–3 September 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Jamal, N.; Saat, S.; Shukor, A.Z. A study on performances of different compensation topologies for loosely coupled inductive power transfer system. In Proceedings of the 2013 IEEE International Conference on Control System, Computing and Engineering, Penang, Malaysia, 29 November–1 December 2013; pp. 173–178. [Google Scholar] [CrossRef]
- Aditya, K.; Williamson, S.S. Comparative study of series-series and series-parallel topology for long track EV charging application. In Proceedings of the IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 15–18 June 2014; pp. 1–5. [Google Scholar]
- Jamal, N.; Saat, S.; Yusmarnita, Y.; Zaid, T.; Isa, A.A.M. Investigations on Capacitor Compensation Topologies Effects of Different Inductive Coupling Links Configurations. Int. J. Power Electron. Drive Syst. (IJPEDS) 2015, 6, 274. [Google Scholar] [CrossRef]
- Sohn, Y.H.; Choi, B.H.; Lee, E.S.; Lim, G.C.; Cho, G.-H.; Rim, C.T. General Unified Analyses of Two-Capacitor Inductive Power Transfer Systems: Equivalence of Current-Source SS and SP Compensations. IEEE Trans. Power Electron. 2015, 30, 6030–6045. [Google Scholar] [CrossRef]
- Esteban, B.; Sid-Ahmed, M.; Kar, N.C. A Comparative Study of Power Supply Architectures in Wireless EV Charging Systems. IEEE Trans. Power Electron. 2015, 30, 6408–6422. [Google Scholar] [CrossRef]
- Kan, T.; Nguyen, T.-D.; White, J.C.; Malhan, R.K.; Mi, C.C. A New Integration Method for an Electric Vehicle Wireless Charging System Using LCC Compensation Topology: Analysis and Design. IEEE Trans. Power Electron. 2016, 32, 1638–1650. [Google Scholar] [CrossRef]
- Egan, M.G.; O’Sullivan, D.L.; Hayes, J.G.; Willers, M.J.; Henze, C.P. Power-Factor-Corrected Single-Stage Inductive Charger for Electric Vehicle Batteries. IEEE Trans. Ind. Electron. 2007, 54, 1217–1226. [Google Scholar] [CrossRef]
- Li, S.; Li, W.; Deng, J.; Nguyen, T.D.; Mi, C.C. A Double-Sided LCC Compensation Network and Its Tuning Method for Wireless Power Transfer. IEEE Trans. Veh. Technol. 2015, 64, 2261–2273. [Google Scholar] [CrossRef]
- Li, W.; Zhao, H.; Li, S.; Deng, J.; Kan, T.; Mi, C.C. Integrated LCC-Compensation Topology for Wireless Charger in Electric and Plug-in Electric Vehicles. IEEE Trans. Ind. Electron. 2014, 62, 4215–4225. [Google Scholar] [CrossRef]
- Shi, W.; Deng, J.; Wang, Z.; Cheng, X. The Start-up Dynamic Analysis and One Cycle Control-PD Control Combined Strategy for Primary-Side Controlled Wireless Power Transfer System. IEEE Access 2018, 6, 14439–14450. [Google Scholar] [CrossRef]
- Li, Y.; Xu, Q.; Lin, T.; Hu, J.; He, Z.; Mai, R. Analysis and Design of Load-Independent Output Current or Output Voltage of a Three-Coil Wireless Power Transfer System. IEEE Trans. Transp. Electrif. 2018, 4, 364–375. [Google Scholar] [CrossRef]
- Hatchavanich, N.; Konghirun, M.; Saengswang, A. LCL-LCCL voltage source inverter with phase shift control for wireless EV charger. In Proceedings of the 2017 IEEE 12th International Conference on Power Electronics and Drive Systems (PEDS), Honolulu, HI, USA, 12–15 December 2017; pp. 297–301. [Google Scholar] [CrossRef]
- Zhao, H.; Shu, W.; Li, D.; Li, S. A novel wireless power charging system for electric bike application. In Proceedings of the 2015 IEEE PELS Workshop on Emerging Technologies: Wireless Power (2015 WoW), Daejeon, Korea, 1–4 January 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Li, W.; Zhao, H.; Deng, J.; Li, S.; Mi, C.C. Comparison Study on SS and Double-Sided LCC Compensation Topologies for EV/PHEV Wireless Chargers. IEEE Trans. Veh. Technol. 2015, 65, 4429–4439. [Google Scholar] [CrossRef]
- Fu, D.; Lu, B.; Lee, F.C. 1MHz High Efficiency LLC Resonant Converters with Synchronous Rectifier. In Proceedings of the 2007 IEEE Power Electronics Specialists Conference, Orlando, FL, USA, 17–21 June 2007; pp. 2404–2410. [Google Scholar] [CrossRef]
- Yao, Y.; Liu, X.; Wang, Y.; Xu, D. LC/CL compensation topology and efficiency-based optimisation method for wireless power transfer. IET Power Electron. 2018, 11, 1029–1037. [Google Scholar] [CrossRef]
- Alam, M.; Mekhilef, S.; Bassi, H.; Rawa, M.J.H. Analysis of LC-LC2 Compensated Inductive Power Transfer for High Efficiency and Load Independent Voltage Gain. Energies 2018, 11, 2883. [Google Scholar] [CrossRef]
- Hou, J.; Chen, Q.; Yan, K.; Ren, X.; Wong, S.-C.; Tse, C.K. Analysis and control of S/SP compensation contactless resonant converter with constant voltage gain. In Proceedings of the 2013 IEEE Energy Conversion Congress and Exposition, Denver, CO, USA, 15–19 September 2013; pp. 2552–2558. [Google Scholar]
- Hou, J.; Chen, Q.; Ren, X.; Ruan, X.; Wong, S.-C.; Tse, C.K. Precise Characteristics Analysis of Series/Series-Parallel Compensated Contactless Resonant Converter. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 3, 101–110. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, H.; Park, S.-J.; Kim, D.-H. A Comparative Study of S-S and LCCL-S Compensation Topologies in Inductive Power Transfer Systems for Electric Vehicles. Energies 2019, 12, 1913. [Google Scholar] [CrossRef]
- Li, S.; Wang, L.; Guo, Y.; Tao, C.; Ji, L. Power Stabilization with Double Transmitting Coils and T-Type Compensation Network for Dynamic Wireless Charging of EV. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 8, 1801–1812. [Google Scholar] [CrossRef]
- Zhu, Y.; Wu, H.; Li, F.; Zhu, Y.; Pei, Y.; Liu, W. A Comparative Analysis of S-S and LCCL-S Compensation for Wireless Power Transfer with a Wide Range Load Variation. Electronics 2022, 11, 420. [Google Scholar] [CrossRef]
- Zhang, L.; Li, H.; Guo, Q.; Xie, S.; Yang, Y. Research on Constant Voltage/Current Output of LCC–S Envelope Modulation Wireless Power Transfer System. Energies 2022, 15, 1562. [Google Scholar] [CrossRef]
- Hu, F.-R.; Hu, J.-S. On the Asymptotic Behavior and Parameter Estimation of a Double-Sided LCC-Compensated Wireless Power Transfer System. Machines 2021, 9, 287. [Google Scholar] [CrossRef]
- Campi, T.; Cruciani, S.; Maradei, F.; Feliziani, M. Near-Field Reduction in a Wireless Power Transfer System Using LCC Compensation. IEEE Trans. Electromagn. Compat. 2017, 59, 686–694. [Google Scholar] [CrossRef]
- Nguyen, T.-D.; Li, S.; Li, W.; Mi, C.C. Feasibility study on bipolar pads for efficient wireless power chargers. In Proceedings of the 2014 IEEE Applied Power Electronics Conference and Exposition—APEC 2014, Fort Worth, TX, USA, 16–20 March 2014; pp. 1676–1682. [Google Scholar] [CrossRef]
- Deng, J.; Li, W.; Nguyen, T.D.; Li, S.; Mi, C.C. Compact and Efficient Bipolar Coupler for Wireless Power Chargers: Design and Analysis. IEEE Trans. Power Electron. 2015, 30, 6130–6140. [Google Scholar] [CrossRef]
- Zaheer, A.; Neath, M.; Beh, H.Z.Z.; Covic, G.A. A Dynamic EV Charging System for Slow Moving Traffic Applications. IEEE Trans. Transp. Electrif. 2016, 3, 354–369. [Google Scholar] [CrossRef]
- Onar, O.C.; Miller, J.M.; Campbell, S.L.; Coomer, C.; White, C.P.; Seiber, L.E. A novel wireless power transfer for in-motion EV/PHEV charging. In Proceedings of the 2013 Twenty-Eighth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 17–21 March 2013; pp. 3073–3080. [Google Scholar] [CrossRef]
- Cirimele, V.; Freschi, F.; Guglielmi, P. Wireless power transfer structure design for electric vehicle in charge while driving. In Proceedings of the 2014 International Conference on Electrical Machines (ICEM), Berlin, Germany, 2–5 September 2014; pp. 2461–2467. [Google Scholar] [CrossRef]
- Cirimele, V.; Pichon, L.; Freschi, F. Electromagnetic modeling and performance comparison of different pad-to-pad length ratio for dynamic inductive power transfer. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 4499–4503. [Google Scholar] [CrossRef]
- Wu, H.H.; Gilchrist, A.; Sealy, K.D.; Bronson, D. A High Efficiency 5 kW Inductive Charger for EVs Using Dual Side Control. IEEE Trans. Ind. Inform. 2012, 8, 585–595. [Google Scholar] [CrossRef]
- Wu, H.H.; Gilchrist, A.; Sealy, K.; Israelsen, P.; Muhs, J. Design of Symmetric Voltage Cancellation Control for LCL converters in Inductive Power Transfer Systems. In Proceedings of the 2011 IEEE International Electric Machines & Drives Conference (IEMDC), Niagara Falls, ON, Canada, 15–18 May 2011; pp. 866–871. [Google Scholar] [CrossRef]
- Park, C.; Lee, S.; Jeong, S.Y.; Cho, G.-H.; Rim, C.T. Uniform Power I-Type Inductive Power Transfer System With DQ-Power Supply Rails for On-Line Electric Vehicles. IEEE Trans. Power Electron. 2015, 30, 6446–6455. [Google Scholar] [CrossRef]
- Lima, G.D.F.; Godoy, R.B. Modeling and Prototype of a Dynamic Wireless Charging System Using LSPS Compensation Topology. IEEE Trans. Ind. Appl. 2018, 55, 786–793. [Google Scholar] [CrossRef]
- Miller, J.M.; Onar, O.C.; Chinthavali, M. Primary-Side Power Flow Control of Wireless Power Transfer for Electric Vehicle Charging. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 3, 147–162. [Google Scholar] [CrossRef]
- Vu, V.-B.; Dahidah, M.; Pickert, V.; Phan, V.-T. A High-Power Multiphase Wireless Dynamic Charging System with Low Output Power Pulsation for Electric Vehicles. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 8, 3592–3608. [Google Scholar] [CrossRef]
- Arteaga, J.M.; Aldhaher, S.; Kkelis, G.; Yates, D.C.; Mitcheson, P.D. Multi-MHz IPT Systems for Variable Coupling. IEEE Trans. Power Electron. 2017, 33, 7744–7758. [Google Scholar] [CrossRef]
- Azad, A.N.; Echols, A.; Kulyukin, V.A.; Zane, R.; Pantic, Z. Analysis, Optimization, and Demonstration of a Vehicular Detection System Intended for Dynamic Wireless Charging Applications. IEEE Trans. Transp. Electrif. 2018, 5, 147–161. [Google Scholar] [CrossRef]
- Huang, Y.; Liu, C.; Zhou, Y.; Xiao, Y.; Liu, S. Power Allocation for Dynamic Dual-Pickup Wireless Charging System of Electric Vehicle. IEEE Trans. Magn. 2019, 55, 1–6. [Google Scholar] [CrossRef]
- Xiang, L.; Li, X.; Tian, J.; Tian, Y. A Crossed DD Geometry and Its Double-Coil Excitation Method for Electric Vehicle Dynamic Wireless Charging Systems. IEEE Access 2018, 6, 45120–45128. [Google Scholar] [CrossRef]
- Ge, X.-J.; Sun, Y.; Wang, Z.-H.; Tang, C.-S. Dual-Independent-Output Inverter for Dynamic Wireless Power Transfer System. IEEE Access 2019, 7, 107320–107333. [Google Scholar] [CrossRef]
- Farajizadeh, F.; Vilathgamuwa, D.M.; Jovanovic, D.; Jayathurathnage, P.; Ledwich, G.; Madawala, U. Expandable N-Legged Converter to Drive Closely Spaced Multitransmitter Wireless Power Transfer Systems for Dynamic Charging. IEEE Trans. Power Electron. 2019, 35, 3794–3806. [Google Scholar] [CrossRef]
- Dai, X.; Jiang, J.-C.; Wu, J.-Q. Charging Area Determining and Power Enhancement Method for Multiexcitation Unit Configuration of Wirelessly Dynamic Charging EV System. IEEE Trans. Ind. Electron. 2018, 66, 4086–4096. [Google Scholar] [CrossRef]
- Kamineni, A.; Neath, M.J.; Covic, G.A.; Boys, J.T. A Mistuning-Tolerant and Controllable Power Supply for Roadway Wireless Power Systems. IEEE Trans. Power Electron. 2016, 32, 6689–6699. [Google Scholar] [CrossRef]
- Kamineni, A.; Covic, G.A.; Boys, J.T. Self-Tuning Power Supply for Inductive Charging. IEEE Trans. Power Electron. 2016, 32, 3467–3479. [Google Scholar] [CrossRef]
- Jeong, S.Y.; Park, J.H.; Hong, G.P.; Rim, C.T. Autotuning Control System by Variation of Self-Inductance for Dynamic Wireless EV Charging with Small Air Gap. IEEE Trans. Power Electron. 2018, 34, 5165–5174. [Google Scholar] [CrossRef]
- Li, Y.; Hu, J.; Lin, T.; Li, X.; Chen, F.; He, Z.; Mai, R. A New Coil Structure and Its Optimization Design with Constant Output Voltage and Constant Output Current for Electric Vehicle Dynamic Wireless Charging. IEEE Trans. Ind. Informatics 2019, 15, 5244–5256. [Google Scholar] [CrossRef]
- Covic, G.A.; Boys, J.T.; Kissin, M.L.G.; Lu, H.G. A Three-Phase Inductive Power Transfer System for Roadway-Powered Vehicles. IEEE Trans. Ind. Electron. 2007, 54, 3370–3378. [Google Scholar] [CrossRef]
- Kesler, M. Highly Resonant Wireless Power Transfer: Safe, Efficient, and Over Distance; Witricity Corporation: Watertown, MA, USA, 2013; pp. 1–32. [Google Scholar]
- Shi, B.; Yang, F.; Wang, S.; Ouyang, M. Efficiency Improvement of Wireless Charging System Based on Active Power Source in Receiver. IEEE Access 2019, 7, 98136–98143. [Google Scholar] [CrossRef]
- Kolar, J.W.; Friedli, T.; Rodriguez, J.; Wheeler, P.W. Review of Three-Phase PWM AC–AC Converter Topologies. IEEE Trans. Ind. Electron. 2011, 58, 4988–5006. [Google Scholar] [CrossRef]
- Gyugyi, L.; Pelly, B.R. Static Power Frequency Changers: Theory, Performance, and Application; John Wiley & Sons: Hoboken, NJ, USA, 1976. [Google Scholar]
- Empringham, L.; Kolar, J.W.; Rodriguez, J.; Wheeler, P.W.; Clare, J.C. Technological Issues and Industrial Application of Matrix Converters: A Review. IEEE Trans. Ind. Electron. 2013, 60, 4260–4271. [Google Scholar] [CrossRef]
- Wheeler, P.W.; Rodriguez, J.; Clare, J.C.; Empringham, L.; Weinstein, A. Matrix converters: A technology review. IEEE Trans. Ind. Electron. 2002, 49, 276–288. [Google Scholar] [CrossRef]
- Wang, L.; Liu, C.; Fang, J. Design of a Single-Stage Transformerless Buck–Boost Inverter for Electric Vehicle Chargers. Appl. Sci. 2022, 12, 6705. [Google Scholar] [CrossRef]
- Darvish, P.; Mekhilef, S.; Bin Illias, H.A. A Novel S–S–LCLCC Compensation for Three-Coil WPT to Improve Misalignment and Energy Efficiency Stiffness of Wireless Charging System. IEEE Trans. Power Electron. 2020, 36, 1341–1355. [Google Scholar] [CrossRef]
- Zuckerberger, A.; Weinstock, D.; Alexandrovitz, A. Single-phase matrix converter. IEEE Proc.-Electr. Power Appl. 1997, 144, 235–240. [Google Scholar] [CrossRef]
- Nguyen, M.-K.; Jung, Y.-G.; Lim, Y.-C.; Kim, Y.-M. A Single-Phase Z-Source Buck–Boost Matrix Converter. IEEE Trans. Power Electron. 2009, 25, 453–462. [Google Scholar] [CrossRef]
- Aleem, Z.; Shin, D.; Cha, H.; Lee, J.-P.; Yoo, D.-W.; Peng, F.Z. Parallel operation of inverter using trans-Z-source network. IET Power Electron. 2015, 8, 2176–2183. [Google Scholar] [CrossRef]
- Aleem, Z.; Winberg, S.L.; Iqbal, A.; Al-Hitmi, M.A.E.; Hanif, M. Single-Phase Transformer-based HF-Isolated Impedance Source Inverters with Voltage Clamping Techniques. IEEE Trans. Ind. Electron. 2019, 66, 8434–8444. [Google Scholar] [CrossRef]
- Aleem, Z.; Hanif, M. Single-phase transformer based Z-source AC-AC converters. In Proceedings of the 2016 IEEE 2nd Annual Southern Power Electronics Conference (SPEC), Auckland, New Zealand, 5–8 December 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Peng, F.Z. Z-source inverter. IEEE Trans. Ind. Appl. 2003, 39, 504–510. [Google Scholar] [CrossRef]
- Ahmed, H.F.; Cha, H.; Khan, A.A.; Kim, J.; Cho, J. A Single-Phase Buck–Boost Matrix Converter with Only Six Switches and Without Commutation Problem. IEEE Trans. Power Electron. 2016, 32, 1232–1244. [Google Scholar] [CrossRef]
- Ahmed, H.F.; Cha, H.; Khan, A.A. A Single-Phase Buck Matrix Converter with High-Frequency Transformer Isolation and Reduced Switch Count. IEEE Trans. Ind. Electron. 2017, 64, 6979–6988. [Google Scholar] [CrossRef]
- Gupta, R.K.; Mohapatra, K.K.; Somani, A.; Mohan, N. Direct-Matrix-Converter-Based Drive for a Three-Phase Open-End-Winding AC Machine with Advanced Features. IEEE Trans. Ind. Electron. 2010, 57, 4032–4042. [Google Scholar] [CrossRef]
- Sun, Y.; Li, X.; Su, M.; Wang, H.; Dan, H.; Xiong, W. Indirect Matrix Converter-Based Topology and Modulation Schemes for Enhancing Input Reactive Power Capability. IEEE Trans. Power Electron. 2014, 30, 4669–4681. [Google Scholar] [CrossRef]
- Kolar, J.W.; Schafmeister, F.; Round, S.D.; Ertl, H. Novel Three-Phase AC–AC Sparse Matrix Converters. IEEE Trans. Power Electron. 2007, 22, 1649–1661. [Google Scholar] [CrossRef]
- Round, S.; Schafmeister, F.; Heldwein, M.; Pereira, E.; Serpa, L.; Kolar, J. Comparison of Performance and Realization Effort of a Very Sparse Matrix Converter to a Voltage DC Link PWM Inverter with Active Front End. IEEJ Trans. Ind. Appl. 2006, 126, 578–588. [Google Scholar] [CrossRef]
- Schonberger, J.; Friedli, T.; Round, S.D.; Kolar, J.W. An Ultra Sparse Matrix Converter with a Novel Active Clamp Circuit. In Proceedings of the 2007 Power Conversion Conference-Nagoya, Nagoya, Japan, 2–5 April 2007; pp. 784–791. [Google Scholar] [CrossRef]
- Bozorgi, A.M.; Farasat, M. An In-Depth Investigation of a Z-Source Ultrasparse Matrix Converter in Buck and Boost Modes of Operation. IEEE Trans. Ind. Electron. 2017, 65, 5177–5187. [Google Scholar] [CrossRef]
- Ge, B.; Lei, Q.; Qian, W.; Peng, F.Z. A Family of Z-Source Matrix Converters. IEEE Trans. Ind. Electron. 2011, 59, 35–46. [Google Scholar] [CrossRef]
- Control and applications of direct matrix converters: A review. Chin. J. Electr. Eng. 2018, 4, 18–27. [CrossRef]
- Vijayagopal, M.; Zanchetta, P.; Empringham, L.; de Lillo, L.; Tarisciotti, L.; Wheeler, P. Control of a Direct Matrix Converter with Modulated Model-Predictive Control. IEEE Trans. Ind. Appl. 2017, 53, 2342–2349. [Google Scholar] [CrossRef]
- Kolar, J.; Baumann, M.; Schafmeister, F.; Ertl, H. Novel three-phase AC-DC-AC sparse matrix converter. In Proceedings of the APEC Seventeenth Annual IEEE Applied Power Electronics Conference and Exposition (Cat. No.02CH37335), Dallas, TX, USA, 10–14 March 2002; Volume 2, pp. 777–791. [Google Scholar] [CrossRef]
- Tarisciotti, L.; Lei, J.; Formentini, A.; Trentin, A.; Zanchetta, P.; Wheeler, P.; Rivera, M. Modulated Predictive Control for Indirect Matrix Converter. IEEE Trans. Ind. Appl. 2017, 53, 4644–4654. [Google Scholar] [CrossRef]
- Kusaka, K.; Furukawa, K.; Itoh, J.-I. Development of Three-Phase Wireless Power Transfer System with Reduced Radiation Noise. IEEJ J. Ind. Appl. 2019, 8, 600–607. [Google Scholar] [CrossRef]
- Kusaka, K.; Kusui, R.; Itoh, J.-I.; Sato, D.; Obayashi, S.; Ishida, M. A 22 kW-85 kHz Three-phase Wireless Power Transfer System with 12 coils. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 3340–3347. [Google Scholar] [CrossRef]
- Itoh, J.-I.; Yamanokuchi, K.; Takuma, S.; Kusaka, K. Three-phase Wireless Power Supply System Using Matrix Converter. In Proceedings of the 2019 21st European Conference on Power Electronics and Applications (EPE ’19 ECCE Europe), Genova, Italy, 2–5 September 2019. [Google Scholar] [CrossRef]
- Su, G.-J.; Onar, O.C.; Pries, J.; Galigekere, V.P. Variable Duty Control of Three-Phase Voltage Source Inverter for Wireless Power Transfer Systems. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 2118–2124. [Google Scholar] [CrossRef]
- Tavakoli, R.; Pantic, Z. Analysis, Design, and Demonstration of a 25-kW Dynamic Wireless Charging System for Roadway Electric Vehicles. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 6, 1378–1393. [Google Scholar] [CrossRef]
- Babaki, A.; Vaez-Zadeh, S.; Zakerian, A. Performance Optimization of Dynamic Wireless EV Charger Under Varying Driving Conditions Without Resonant Information. IEEE Trans. Veh. Technol. 2019, 68, 10429–10438. [Google Scholar] [CrossRef]
- Li, S.; Mi, C.C. Wireless Power Transfer for Electric Vehicle Applications. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 3, 4–17. [Google Scholar] [CrossRef]
- Fu, M.; Ma, C.; Zhu, X. A Cascaded Boost–Buck Converter for High-Efficiency Wireless Power Transfer Systems. IEEE Trans. Ind. Inform. 2013, 10, 1972–1980. [Google Scholar] [CrossRef]
- Tripathi, P.; Kumar, S.V.; Bhaskar, D.R. Bidirectional charger for A Single-Phase Electric Vehicle using Buck Boost Converter (G2V & V2G Application). Tech. Int. J. Eng. Res. 2022, 9, 112–116. [Google Scholar]
- Bronzi, W.; Derrmann, T.; Castignani, G.; Engel, T. Towards characterizing Bluetooth discovery in a vehicular context. In Proceedings of the 2016 IEEE Vehicular Networking Conference (VNC), Columbus, OH, USA, 8–10 December 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Mohamed, A.A.S.; Mohammed, O.A. Bilayer Predictive Power Flow Controller for Bidirectional Operation of Wirelessly Connected Electric Vehicles. IEEE Trans. Ind. Appl. 2019, 55, 4258–4267. [Google Scholar] [CrossRef]
- Gonzalez-Gonzalez, J.M.; Trivino-Cabrera, A.; Aguado, J.A. Model Predictive Control to Maximize the Efficiency in EV Wireless Chargers. IEEE Trans. Ind. Electron. 2021, 69, 1244–1253. [Google Scholar] [CrossRef]
- Yang, D.; Won, S.; Tian, J.; Cheng, Z.; Kim, J. A Method of Estimating Mutual Inductance and Load Resistance Using Harmonic Components in Wireless Power Transfer System. Energies 2019, 12, 2728. [Google Scholar] [CrossRef]
- Chen, C.; Zhou, H.; Deng, Q.; Hu, W.; Yu, Y.; Lu, X.; Lai, J. Modeling and Decoupled Control of Inductive Power Transfer to Implement Constant Current/Voltage Charging and ZVS Operating for Electric Vehicles. IEEE Access 2018, 6, 59917–59928. [Google Scholar] [CrossRef]
- Sis, S.A.; Akca, H. Maximizing the efficiency of wireless power transfer systems with an optimal duty cycle operation. AEU-Int. J. Electron. Commun. 2020, 116, 153081. [Google Scholar] [CrossRef]
- González-González, J.M.; Triviño-Cabrera, A.; Aguado, J.A. Design and Validation of a Control Algorithm for a SAE J2954-Compliant Wireless Charger to Guarantee the Operational Electrical Constraints. Energies 2018, 11, 604. [Google Scholar] [CrossRef]
- Joseph, P.K.; Elangovan, D.; Arunkumar, G. Linear control of wireless charging for electric bicycles. Appl. Energy 2019, 255, 113898. [Google Scholar] [CrossRef]
- Kuo, N.-C.; Zhao, B.; Niknejad, A.M. Bifurcation Analysis in Weakly-Coupled Inductive Power Transfer Systems. IEEE Trans. Circuits Syst. I: Regul. Pap. 2016, 63, 727–738. [Google Scholar] [CrossRef]
- Gati, E.; Kampitsis, G.; Manias, S. Variable Frequency Controller for Inductive Power Transfer in Dynamic Conditions. IEEE Trans. Power Electron. 2016, 32, 1684–1696. [Google Scholar] [CrossRef]
- Jiang, Y.; Wang, L.; Wang, Y.; Liu, J.; Li, X.; Ning, G. Analysis, Design, and Implementation of Accurate ZVS Angle Control for EV Battery Charging in Wireless High-Power Transfer. IEEE Trans. Ind. Electron. 2018, 66, 4075–4085. [Google Scholar] [CrossRef]
- Chen, Y.; Kou, Z.; Zhang, Y.; He, Z.; Mai, R.; Cao, G. Hybrid Topology with Configurable Charge Current and Charge Voltage Output-Based WPT Charger for Massive Electric Bicycles. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 6, 1581–1594. [Google Scholar] [CrossRef]
- Kobayashi, D.; Imura, T.; Hori, Y. Real-time coupling coefficient estimation and maximum efficiency control on dynamic wireless power transfer for electric vehicles. In Proceedings of the 2015 IEEE PELS Workshop on Emerging Technologies: Wireless Power (2015 WoW), Nanjing, China, 5 June 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Chen, C.-I.; Covic, G.A.; Boys, J.T. Regulator capacitor selection for series compensated IPT pickups. In Proceedings of the 2008 34th Annual Conference of IEEE Industrial Electronics, Orlando, FL, USA, 10–13 November 2008; pp. 932–937. [Google Scholar] [CrossRef]
- Jiwariyavej, V.; Imura, T.; Hori, Y. Coupling Coefficients Estimation of Wireless Power Transfer System via Magnetic Resonance Coupling Using Information from Either Side of the System. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 3, 191–200. [Google Scholar] [CrossRef]
- Dai, X.; Li, X.; Li, Y.; Deng, P.; Tang, C. A Maximum Power Transfer Tracking Method for WPT Systems with Coupling Coefficient Identification Considering Two-Value Problem. Energies 2017, 10, 1665. [Google Scholar] [CrossRef]
- Kikuchi, J.; Manjrekar, M.; Lipo, T. Performance improvement of half controlled three phase PWM boost rectifier. In Proceedings of the 30th Annual IEEE Power Electronics Specialists Conference. Record. (Cat. No.99CH36321), Charleston, SC, USA, 27 June–1 July 1999. [Google Scholar] [CrossRef]
- Lin, B.-R.; Hung, Z.-L. A single-phase bidirectional rectifier with power factor correction. In Proceedings of the IEEE Region 10 International Conference on Electrical and Electronic Technology. TENCON 2001 (Cat. No.01CH37239), Singapore, 19–22 August 2001. [Google Scholar] [CrossRef]
- Colak, K.; Asa, E.; Bojarski, M.; Czarkowski, D.; Onar, O.C. A Novel Phase-Shift Control of Semibridgeless Active Rectifier for Wireless Power Transfer. IEEE Trans. Power Electron. 2015, 30, 6288–6297. [Google Scholar] [CrossRef]
- Lee, J.H.; Son, W.-J.; Ann, S.; Byun, J.; Lee, B.K. Improved Pulse Density Modulation with a Distribution Algorithm for Semi-Bridgeless Rectifier of Inductive Power Transfer System in Electric Vehicles. In Proceedings of the 2019 10th International Conference on Power Electronics and ECCE Asia (ICPE 2019—ECCE Asia), Busan, Korea, 27–31 May 2019. [Google Scholar] [CrossRef]
- Fan, M.; Shi, L.; Yin, Z.; Li, Y. A novel pulse density modulation with semi-bridgeless active rectifier in inductive power transfer system for rail vehicle. CES Trans. Electr. Mach. Syst. 2017, 1, 397–404. [Google Scholar] [CrossRef]
- Zhong, W.; Hui, S.Y.R. Charging Time Control of Wireless Power Transfer Systems Without Using Mutual Coupling Information and Wireless Communication System. IEEE Trans. Ind. Electron. 2016, 64, 228–235. [Google Scholar] [CrossRef]
- Zhong, W.X.; Hui, S.Y.R. Maximum Energy Efficiency Tracking for Wireless Power Transfer Systems. IEEE Trans. Power Electron. 2014, 30, 4025–4034. [Google Scholar] [CrossRef]
- Dai, X.; Li, X.; Li, Y.; Hu, A.P. Maximum Efficiency Tracking for Wireless Power Transfer Systems with Dynamic Coupling Coefficient Estimation. IEEE Trans. Power Electron. 2017, 33, 5005–5015. [Google Scholar] [CrossRef]
- Li, H.; Wang, K.; Fang, J.; Tang, Y. Pulse Density Modulated ZVS Full-Bridge Converters for Wireless Power Transfer Systems. IEEE Trans. Power Electron. 2018, 34, 369–377. [Google Scholar] [CrossRef]
- Narusue, Y.; Kawahara, Y.; Asami, T. Maximum efficiency point tracking by input control for a wireless power transfer system with a switching voltage regulator. In Proceedings of the 2015 IEEE Wireless Power Transfer Conference (WPTC), Boulder, CO, USA, 13–15 May 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Wu, M.; Yang, X.; Chen, W.; Wang, L.; Jiang, Y.; Zhao, C.; Yan, Z. A Dual-Sided Control Strategy Based on Mode Switching for Efficiency Optimization in Wireless Power Transfer System. IEEE Trans. Power Electron. 2021, 36, 8835–8848. [Google Scholar] [CrossRef]
- Chen, S.; Chen, Y.; Li, H.; Dung, N.A.; Mai, R.; Tang, Y.; Lai, J.-S. An Operation Mode Selection Method of Dual-Side Bridge Converters for Efficiency Optimization in Inductive Power Transfer. IEEE Trans. Power Electron. 2020, 35, 9992–9997. [Google Scholar] [CrossRef]
- Nagendra, G.R.; Covic, G.A.; Boys, J.T. Sizing of Inductive Power Pads for Dynamic Charging of EVs on IPT Highways. IEEE Trans. Transp. Electrif. 2017, 3, 405–417. [Google Scholar] [CrossRef]
- Lee, W.Y.; Huh, J.; Choi, S.Y.; Thai, X.V.; Kim, J.H.; Al-Ammar, E.A.; El-Kady, M.A.; Rim, C.T. Finite-Width Magnetic Mirror Models of Mono and Dual Coils for Wireless Electric Vehicles. IEEE Trans. Power Electron. 2012, 28, 1413–1428. [Google Scholar] [CrossRef]
- Shladover, S.E. PATH at 20—History and Major Milestones. IEEE Trans. Intell. Transp. Syst. 2007, 8, 584–592. [Google Scholar] [CrossRef]
- Machura, P.; Li, Q. A critical review on wireless charging for electric vehicles. Renew. Sustain. Energy Rev. 2019, 104, 209–234. [Google Scholar] [CrossRef]
- Rim, C.T.; Mi, C. Wireless Power Transfer for Electric Vehicles and Mobile Devices; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar] [CrossRef]
- Lee, S.; Huh, J.; Park, C.; Choi, N.-S.; Cho, G.-H.; Rim, C.-T. On-Line Electric Vehicle using inductive power transfer system. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12–16 September 2010; pp. 1598–1601. [Google Scholar] [CrossRef]
- Choi, S.Y.; Jeong, S.Y.; Gu, B.W.; Lim, G.C.; Rim, C.T. Ultraslim S-Type Power Supply Rails for Roadway-Powered Electric Vehicles. IEEE Trans. Power Electron. 2015, 30, 6456–6468. [Google Scholar] [CrossRef]
- Thai, V.X.; Choi, S.Y.; Choi, B.H.; Kim, J.H.; Rim, C.T. Coreless power supply rails compatible with both stationary and dynamic charging of electric vehicles. In Proceedings of the 2015 IEEE 2nd International Future Energy Electronics Conference (IFEEC), Taipei, Taiwan, 1–4 November 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Wireless Power Transfer–Task 26 Final Report.pdf. Available online: http://www.ieahev.org/assets/1/7/Task_26_Final_Report_v1.7_(FINAL2).pdf (accessed on 20 July 2020).
- Benders, B.; Vermaat, P.; Bludszuweit, H.B.; Theodoropoulos, T. Interoperability Considerations. Available online: http://www.fabric-project.eu/www.fabric-project.eu/images/Deliverables/FABRIC_D33.3_Interoperability_considerations_2017_update.pdf (accessed on 20 July 2020).
- Wireless Charging for Electic Vehicles|UNPLUGGED Project|FP7|CORDIS|European Commission. Available online: https://cordis.europa.eu/project/id/314126 (accessed on 22 February 2021).
- Final Report Summary—UNPLUGGED (Wireless Charging for Electic Vehicles)|Report Summary|UNPLUGGED|FP7|CORDIS|European Commission. Available online: https://cordis.europa.eu/project/id/314126/reporting (accessed on 22 February 2021).
- Systems Control Technology, Inc. Roadway Powered Electric Vehicle Project Track Construction and Testing Program Phase 3D; Systems Control Technology, Inc.: Palo Alto, CA, USA, 1994. [Google Scholar]
- Miller, J.M.; Scudiere, M.B.; McKeever, J.W.; White, C. Wireless power transfer. In Proceedings of the Oak Ridge National Laboratery’s Power Electronics Symposium; 2011. [Google Scholar]
- Covic, G.A.; Elliott, G.A.J.; Stielau, O.; Green, R.M.; Boys, J. The design of a contact-less energy transfer system for a people mover system. In Proceedings of the PowerCon 2000. 2000 International Conference on Power System Technology (Cat. No.00EX409), Perth, WA, Australia, 4–7 December 2000; Volume 1, pp. 79–84. [Google Scholar] [CrossRef]
- Throngnumchai, K.; Hanamura, A.; Naruse, Y.; Takeda, K. Design and Evaluation of a Wireless Power Transfer System with Road Embedded Transmitter Coils for Dynamic Charging of Electric Vehicles. World Electr. Veh. J. 2013, 6, 848–857. [Google Scholar] [CrossRef]
- Lukic, S.; Pantic, Z. Cutting the Cord: Static and Dynamic Inductive Wireless Charging of Electric Vehicles. IEEE Electrif. Mag. 2013, 1, 57–64. [Google Scholar] [CrossRef]
- Wave|Wireless Advanced Vehicle Electrification|Inductive Charging, Wave. Available online: https://waveipt.com/ (accessed on 28 January 2021).
- Coca, E. Wireless Power Transfer: Fundamentals and Technologies; BoD–Books on Demand: Norderstedt, Germany, 2016. [Google Scholar]
- Primove, Bombardier Transportation. Available online: https://localhost:4503/content/bbd-transport/en.html (accessed on 28 January 2021).
- Khan, A.A.Z.A.; SaadAlam, M.; Rafat, Y.; Khan, A.A.; Deshpande, A.A.; Chabaan, R.C. Analytical Review of xEVs Standards. IEEE Trans. Transport. Electrif. 2016, 29. [Google Scholar]
- J1773A: SAE Electric Vehicle Inductively Coupled Charging—SAE International. Available online: https://www.sae.org/standards/content/j1773_201406/ (accessed on 25 October 2019).
- J2847/6A: Communication for Wireless Power Transfer Between Light-Duty Plug-In Electric Vehicles and Wireless EV Charging Stations—SAE International. Available online: https://www.sae.org/standards/content/j2847/6_202009/ (accessed on 6 December 2021).
- J2836/6A: Use Cases for Wireless Charging Communication for Plug-In Electric Vehicles—SAE International. Available online: https://www.sae.org/standards/content/j2836/6_202104/ (accessed on 6 December 2021).
- IEC 61980-1: Electric Vehicle Wireless Power Transfer (WPT) Systems—Part 1: General Requirements. Available online: https://global.ihs.com/doc_detail.cfm?document_name=IEC%2061980%2D1&item_s_key=00656450 (accessed on 6 December 2021).
- IEC 61980-1:2015|IEC Webstore. Available online: https://webstore.iec.ch/publication/22951 (accessed on 25 October 2019).
- IEC/TS 61980-2: Electric Vehicle Wireless Power Transfer (Wpt) Systems—Part 2: Specific Requirements for Communication between Electric Road Vehicle (EV) and Infrastructure. Available online: https://global.ihs.com/doc_detail.cfm?document_name=IEC%2FTS%2061980%2D2&item_s_key=00786994#product-details-list (accessed on 6 December 2021).
- IEC/TS 61980-3: Electric Vehicle Wireless Power Transfer (WPT) Systems—Part 3: Specific Requirements for the Magnetic Field Wireless Power Transfer Systems. Available online: https://global.ihs.com/doc_detail.cfm?&document_name=IEC%2FTS%2061980%2D3&item_s_key=00786995&item_key_date=800631& (accessed on 6 December 2021).
- Alam, M.S.; Ahmad, A.; Khan, Z.A.; Rafat, Y.; Chabaan, R.C.; Khan, I.; Bharadwaj, A.; Al-Shariff, S.M. A Bibliographical Review of Electrical Vehicles (xEVs) Standards. SAE Int. J. Altern. Powertrains 2018, 7, 63–98. [Google Scholar] [CrossRef]
- Leskarac, D.; Panchal, C.; Stegen, S.; Lu, J. PEV Charging Technologies and V2G on Distributed Systems and Utility Interfaces. Veh. Grid: Link. Electr. Veh. Smart Grid 2015, 79, 157–222. [Google Scholar] [CrossRef]
- UL Outline|UL 9741. Available online: https://standardscatalog.ul.com/ProductDetail.aspx?productId=UL9741 (accessed on 6 December 2021).
- UL—SUBJECT 9741—UL Outline of Investigation for Electric Vehicle Power Export Equipment (EVPE)|Engineering360. Available online: https://standards.globalspec.com/std/14386115/subject-9741 (accessed on 6 December 2021).
- Hutchinson, L.; Waterson, B.; Anvari, B.; Naberezhnykh, D. Potential of wireless power transfer for dynamic charging of electric vehicles. IET Intell. Transp. Syst. 2018, 13, 3–12. [Google Scholar] [CrossRef]
- Lamb, M.; Collis, R.; Deix, S.; Krieger, B.; Hautiere, N.; Ifsttar, F. The forever open road: Defining the next generation road. In Proceedings of the AIPCR World Congress, Mexico City, Mexico, 26–30 September 2011. [Google Scholar]
- Chen, F.; Birgisson, B.; Kringos, N. Electrification of Roads: Infrastructural Aspect; National Academy of Sciences: Washington, DC, USA, 2015. [Google Scholar]
- Esguerra, M. Magnetizable concretes as a competitive and road integrable solution to increase the efficiency and/or coil distance for DWPT. In Proceedings of the FABRIC: Wireless Dynamic Charging for FEVs: Challenges and Concepts, Brussels, Belgium, 2 February 2016. [Google Scholar]
- IEC 61980-1:2015/COR1:2017|IEC Webstore. 2019. Available online: https://webstore.iec.ch/publication/59640. (accessed on 25 October 2019).
- Zhang, W.; White, J.C.; Abraham, A.M.; Mi, C.C. Loosely Coupled Transformer Structure and Interoperability Study for EV Wireless Charging Systems. IEEE Trans. Power Electron. 2015, 30, 6356–6367. [Google Scholar] [CrossRef]
- Jiang, H.; Brazis, P.; Tabaddor, M.; Bablo, J. Safety considerations of wireless charger for electric vehicles A review paper. In Proceedings of the 2012 IEEE Symposium on Product Compliance Engineering Proceedings, Portland, OR, USA, 5–7 November 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Hikage, T.; Yamagishi, M.; Shindo, K.; Nojima, T. Active implantable medical device EMI estimation for EV-charging WPT system based on 3D full-wave analysis. In Proceedings of the 2017 Asia-Pacific International Symposium on Electromagnetic Compatibility (APEMC), Seoul, Korea, 20–23 June 2017; pp. 87–89. [Google Scholar] [CrossRef]
- Mariscotti, A. Assessment of Human Exposure (Including Interference to Implantable Devices) to Low-Frequency Electromagnetic Field in Modern Microgrids, Power Systems and Electric Transports. Energies 2021, 14, 6789. [Google Scholar] [CrossRef]
- Campi, T.; Cruciani, S.; Maradei, F.; Feliziani, M. Magnetic Field during Wireless Charging in an Electric Vehicle According to Standard SAE J2954. Energies 2019, 12, 1795. [Google Scholar] [CrossRef]
- Christ, A.; Douglas, M.; Nadakuduti, J.; Kuster, N. Assessing Human Exposure to Electromagnetic Fields From Wireless Power Transmission Systems. Proc. IEEE 2013, 101, 1482–1493. [Google Scholar] [CrossRef]
- Cirimele, V.; Freschi, F.; Giaccone, L.; Pichon, L.; Repetto, M. Human Exposure Assessment in Dynamic Inductive Power Transfer for Automotive Applications. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Joseph, P.K.; Elangovan, D.; Arunkumar, G.; Zekry, A.A. Overview of Different WPT Standards and a Simple Method to Measure EM Radiation of an Electric Vehicle Wireless Charger. In Proceedings of the 2019 IEEE MTT-S International Microwave and RF Conference (IMARC), IIT Bombay, Mumbai, India, 13–15 December 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Park, S. Evaluation of Electromagnetic Exposure During 85 kHz Wireless Power Transfer for Electric Vehicles. IEEE Trans. Magn. 2017, 54, 1–8. [Google Scholar] [CrossRef]
- Yavolovskaya, E.; Chiqovani, G.; Gabriadze, G.; Iosava, S.; Svanidze, L.; Willmann, B.; Jobava, R. Simulation of human exposure to electromagnetic fields of inductive wireless power transfer systems in the frequency range from 1 Hz to 30 MHz. In Proceedings of the 2016 International Symposium on Electromagnetic Compatibility—EMC EUROPE, Wroclaw, Poland, 5–9 September 2016; pp. 491–496. [Google Scholar] [CrossRef]
- Chakarothai, J.; Wake, K.; Arima, T.; Watanabe, S.; Uno, T. Exposure Evaluation of an Actual Wireless Power Transfer System for an Electric Vehicle with Near-Field Measurement. IEEE Trans. Microw. Theory Tech. 2017, 66, 1543–1552. [Google Scholar] [CrossRef]
- Pinto, R.; Bertoluzzo, M.; Lopresto, V.; Mancini, S.; Merla, C.; Pede, G. Exposure assessment of stray electromagnetic fields generated by a wireless power transfer system. In Proceedings of the 2015 9th European Conference on Antennas and Propagation (EuCAP), Lisbon, Portugal, 12–17 April 2015; pp. 1–4. [Google Scholar]
- Son, S.; Woo, S.; Kim, H.; Ahn, J.; Huh, S.; Lee, S.; Ahn, S. Shielding Sensor Coil to Reduce the Leakage Magnetic Field and Detect the Receiver Position in Wireless Power Transfer System for Electric Vehicle. Energies 2022, 15, 2493. [Google Scholar] [CrossRef]
- Zhou, J.; Gao, Y.; Zhou, C.; Ma, J.; Huang, X.; Fang, Y. Optimal power transfer with aluminum shielding for wireless power transfer systems. In Proceedings of the 2017 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, Australia, 11–14 August 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Mohammad, M.; Pries, J.; Onar, O.; Galigekere, V.P.; Su, G.-J.; Anwar, S.; Wilkins, J.; Kavimandan, U.D.; Patil, D. Design of an EMF Suppressing Magnetic Shield for a 100-kW DD-Coil Wireless Charging System for Electric Vehicles. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019; pp. 1521–1527. [Google Scholar] [CrossRef]
- Campi, T.; Cruciani, S.; Maradei, F.; Feliziani, M. Active Coil System for Magnetic Field Reduction in an Automotive Wireless Power Transfer System. In Proceedings of the 2019 IEEE International Symposium on Electromagnetic Compatibility, Signal & Power Integrity (EMC+SIPI), New Orleans, LA, USA, 22–26 July 2019; pp. 189–192. [Google Scholar] [CrossRef]
- Gil, A.; Sauras-Perez, P.; Taiber, J. Communication requirements for Dynamic Wireless Power Transfer for battery electric vehicles. In Proceedings of the 2014 IEEE International Electric Vehicle Conference (IEVC), Florence, Italy, 17–19 December 2014; pp. 1–7. [Google Scholar] [CrossRef]



























{kind=link}
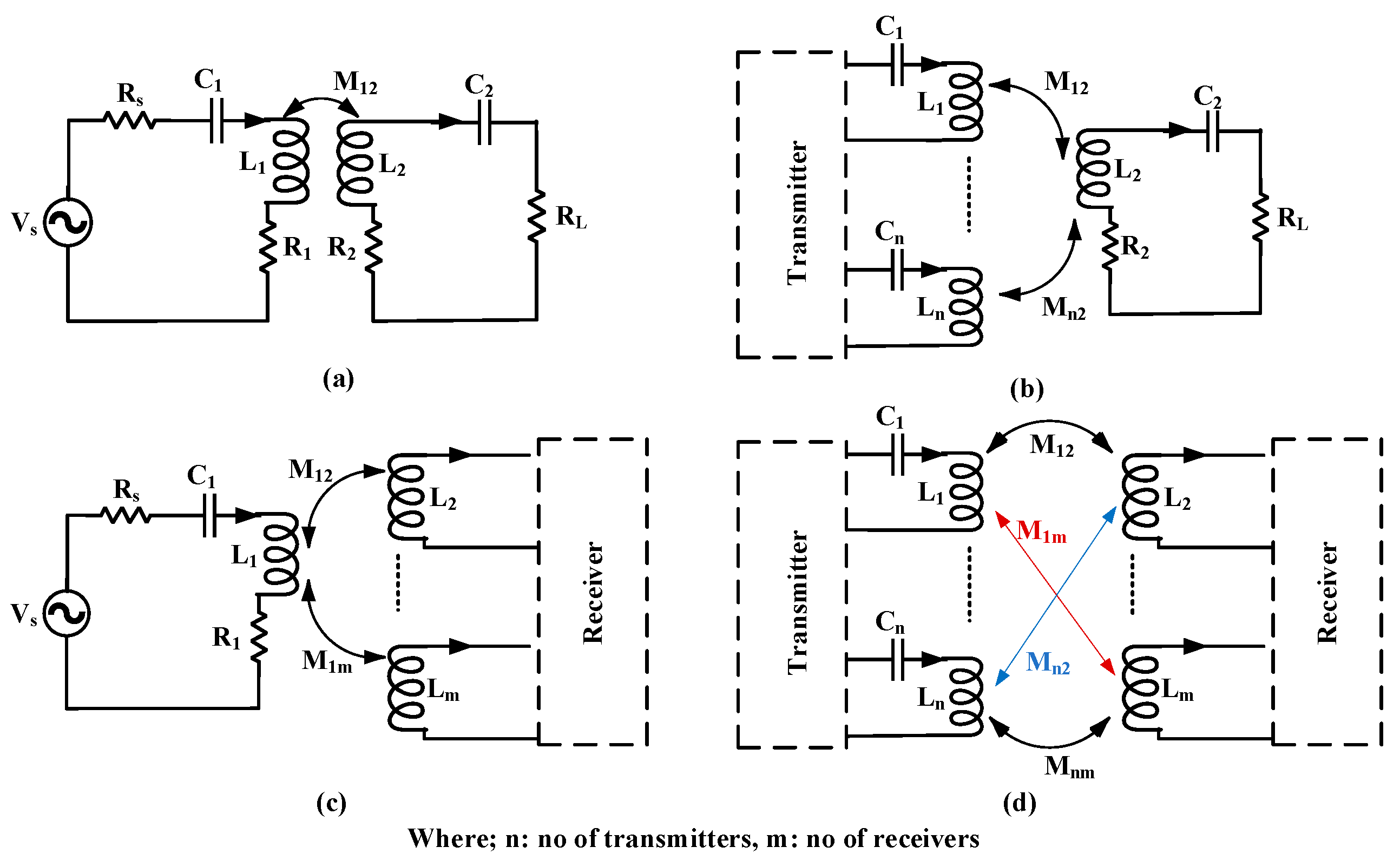{kind=link}
{kind=link}
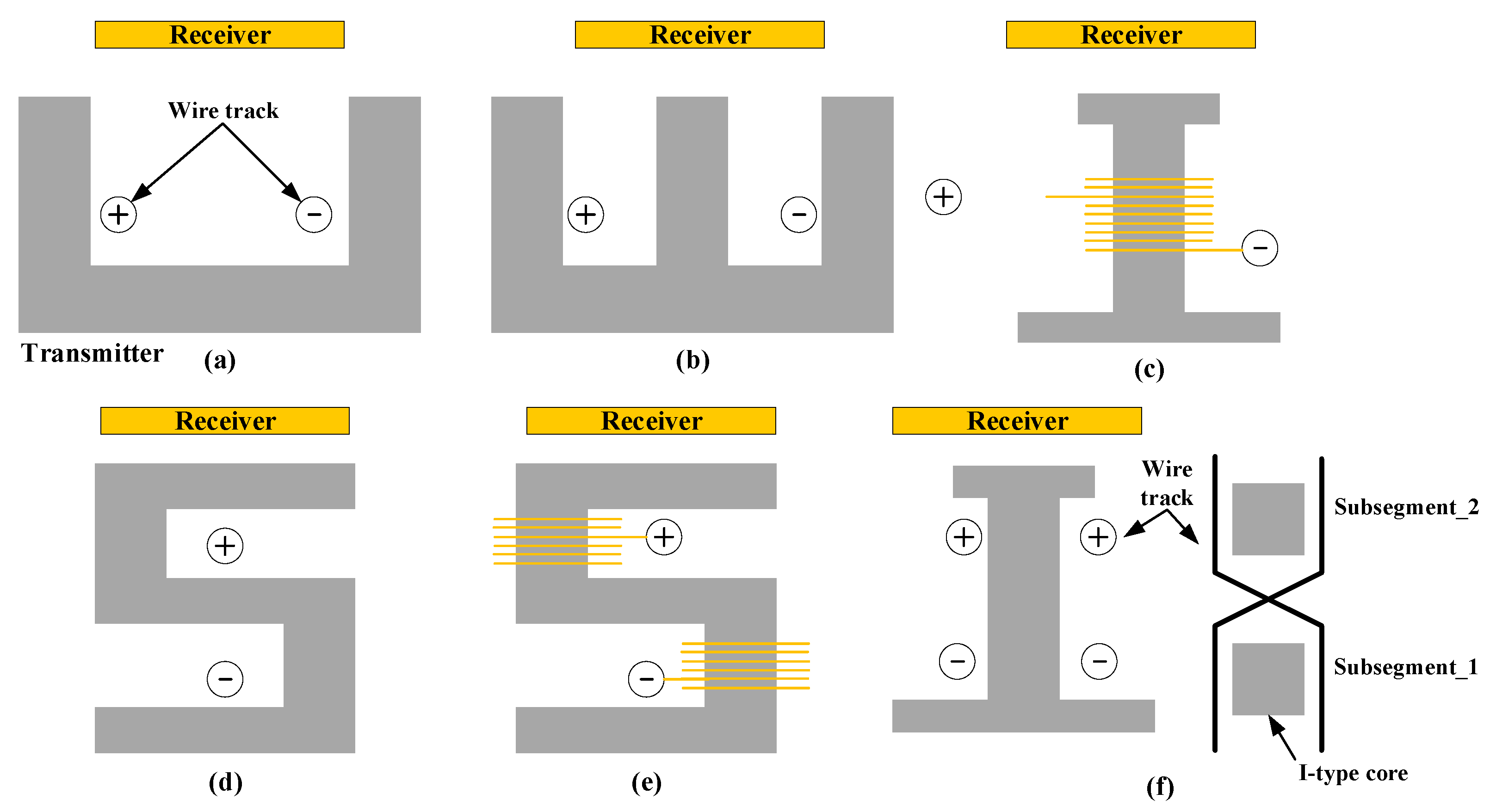{kind=link}
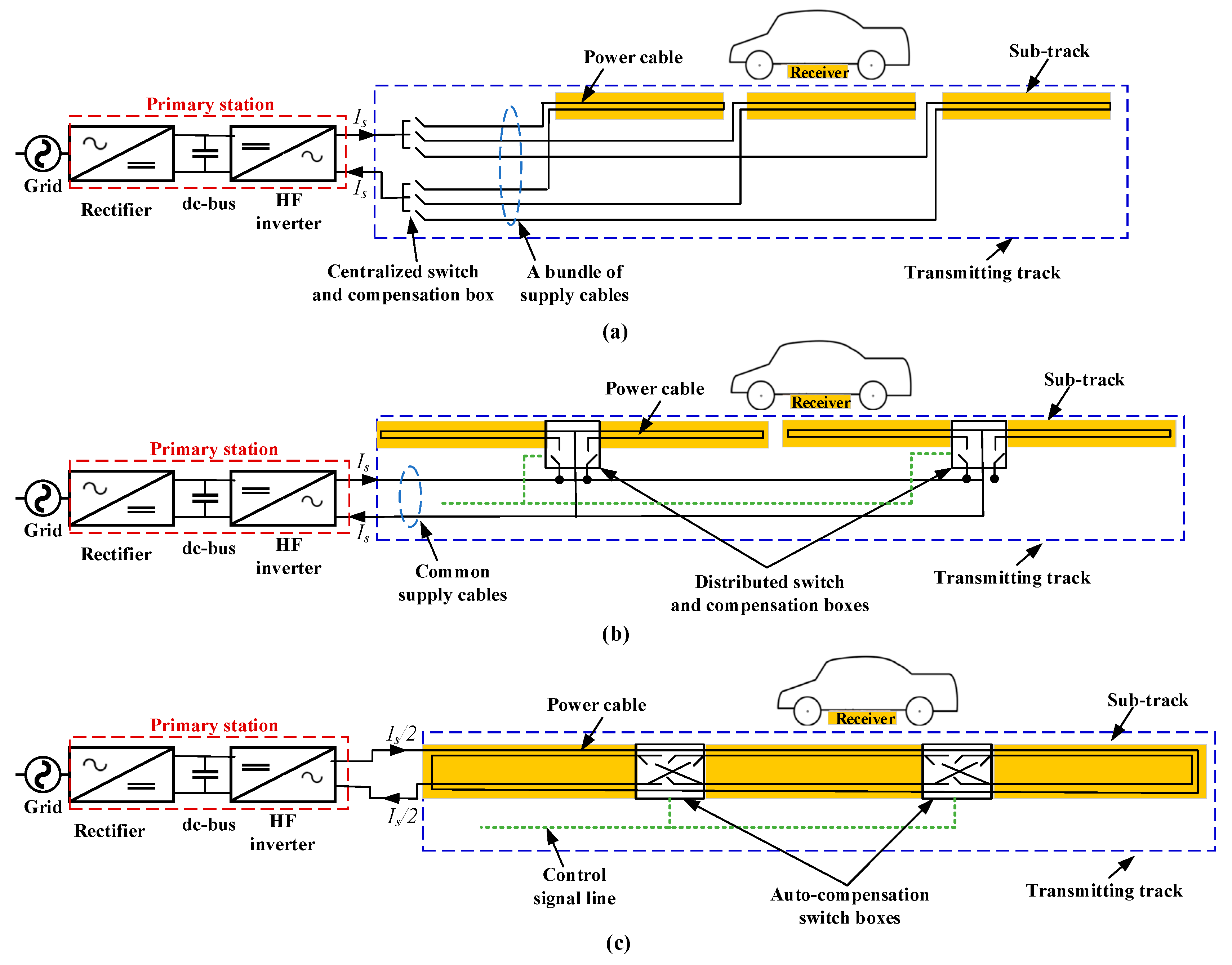{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
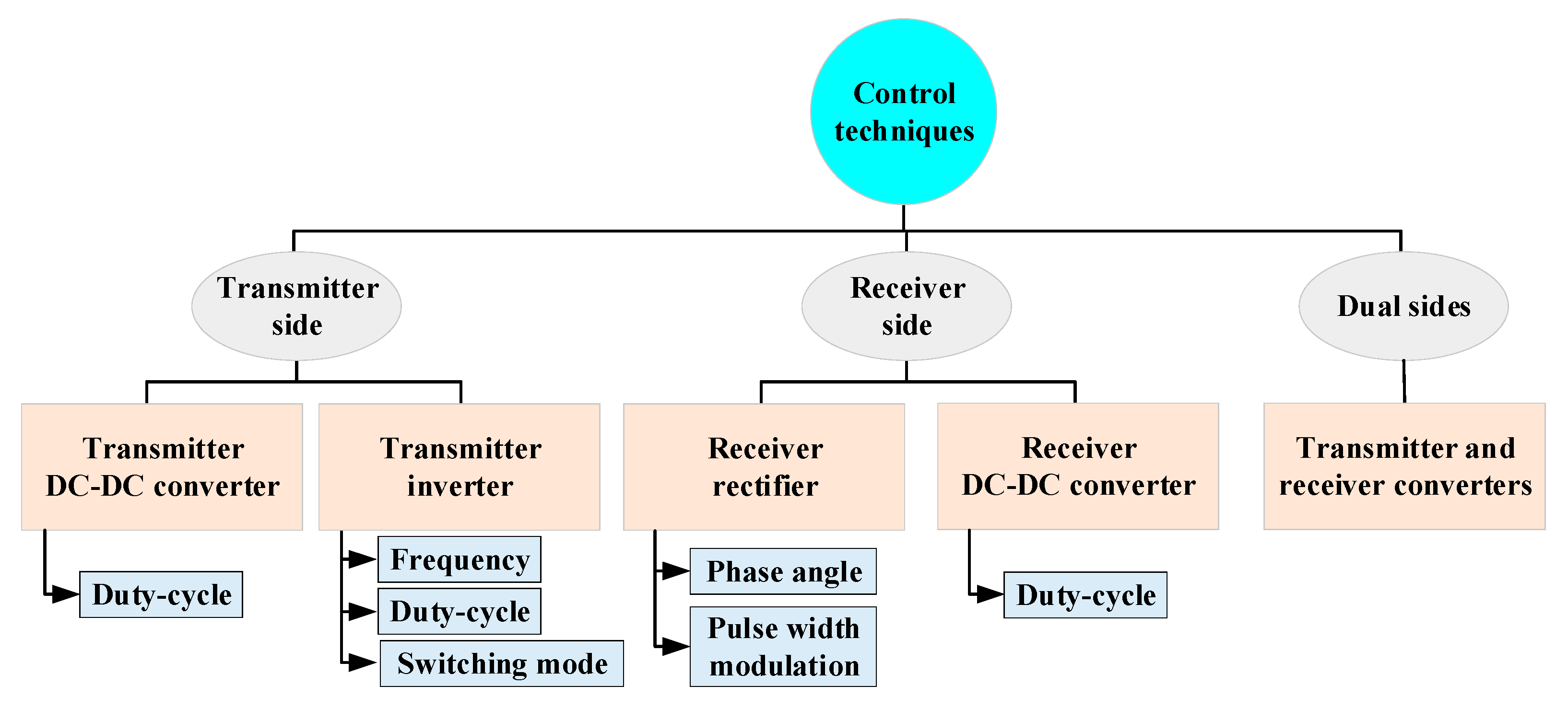{kind=link}
{kind=link}
{kind=link}
{kind=link}
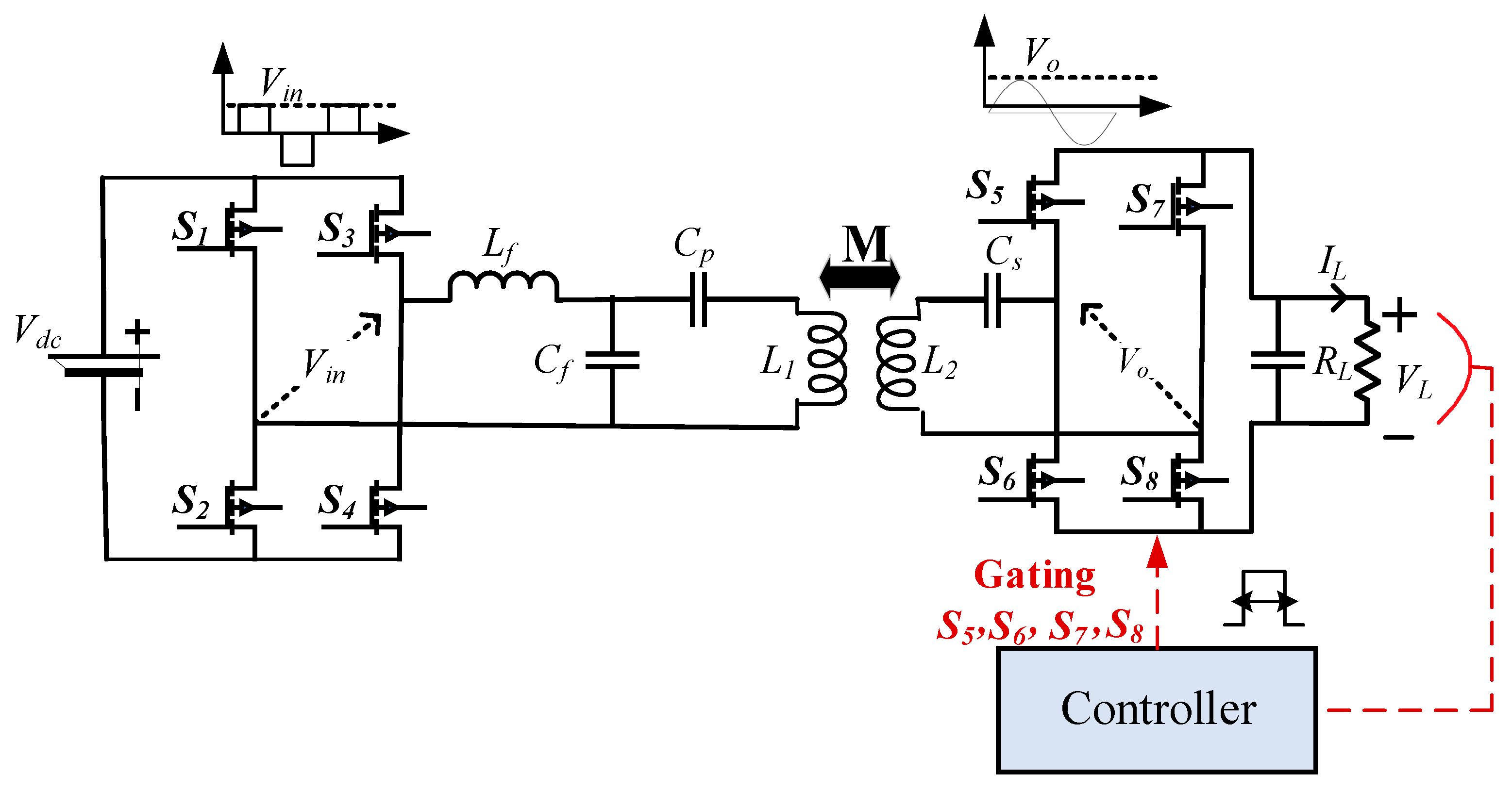{kind=link}
| Technology | Power | Distance | Frequency | References |
|---|---|---|---|---|
| Inductive | Watts to a few hundred kW | Up to 400 mm | 3 kHz–1 MHz | [16,17,18,19] |
| Magnetic resonant | Watts to a few kW | A few centimeters to 2 m | 100 kHz–10 MHz | [9,11,19] |
| Capacitive | mWatts to a few kW | A few centimeters | Several MHz | [20,21,22] |
| Far-field | A few kW to MW | Tens of meters up to several kilometers | 300 MHz–300 GHz | [16,23,24] |
| Magnetic gear | Tens of watts to a few kW | 100–150 mm | 150 Hz–300 Hz | [12,15,19,25] |
| Acoustic | Microwatts to tens of watts | 70–300 mm | 0.5–3 MHz | [10,26,27] |
| Parameters | U-Type | E-Type | I-Type | S-Type | Ultra Slim S-Type | X-Track |
|---|---|---|---|---|---|---|
| Leakage EMF | High | Low | Medium | Small | Very low | Very low |
| Air gap | Medium | Low | Large | Large | Large | Large |
| Track width | Very large | Medium | Small | Small | Small | Small |
| Efficiency | Low | High | High | Low | Low | High |
| Output power | Small | Small | High | High | High | High |
| Lateral misalignment | Large | Small | Large | Large | Very large | Large |
| Studies | [74,75] | [74,75] | [76,77] | [36,74] | [36,75] | [76,77] |
| Topology | Transmitter Capacitor (C1) | Total Impedance (ZT) |
|---|---|---|
| SS | ||
| SP | ||
| PS | ||
| PP |
| Parameter | Topologies | ||||
|---|---|---|---|---|---|
| SS | SP | PS | PP | ||
| Total impedance | Reduces with misalignment. | Reduces with misalignment. | Increases with misalignment. | Increases with misalignment. | |
| Sensitivity of misalignment | Low | Slightly higher than SS. | High | High | |
| Total copper mass at 200 kW | Less copper mass than others. | 4.6% more than SS. | 30% more than SS. | 24% more than SS. | |
| Independence on coupling factor and load impedance | Transmitter | Yes | Yes | No | No |
| Receiver | Yes | No | Yes | No | |
| Zero coupling allowance | Not allowed | Allowed | Allowed | Allowed | |
| Efficiency | Very high | Low | Low | High | |
| Output power | High | High | Low | Low | |
| Load independent output | Voltage and current | Voltage and current | Only voltage | Only current | |
| Proposed power level | Preferred for high power level. | Low or medium power level. | High power level. | High power level. | |
| Inverter device voltage rating | Lower dc link voltage is required (higher than SP). | Lower dc link voltage. | Higher voltage is needed compared to SS and SP. | Higher voltage is needed compared to SS and SP. | |
| Inverter device current rating | Transmitter coil current. | Transmitter coil current. | Active component of the transmitter coil current. | Active component of the transmitter coil current. | |
| Other features |
|
| High efficiency and PF at relatively low mutual inductance and a relatively large range of load variation. | Used for high-power current source driven cables that run over a long distance. | |
| Other drawbacks |
| Lacks dc component blocking. |
|
| |
| Proposed application | WPT system (static and dynamic charging) for electric cars. |
| High-power applications, electric vehicles, and buses. | High-power applications, electric vehicles, and buses. | |
| Parameter | Topologies | |||
|---|---|---|---|---|
| LCL and Its Modifications | LCC and Its Modifications | SP-S | S-SP | |
| Cost and size | High | Less size and cost than LCL topology. | Not high | Not high |
| Additional element on the side | Two inductances. | One capacitor, one inductance. | One capacitor. | One capacitor. |
| Features |
|
|
|
|
| Drawbacks | The impedance transferred to the transmitter contains both imaginary and real parts of the load. | More complex in control. | Large voltage on the capacitor due to high-frequency current during series compensation. | Not detected. |
| Proposed application | Charger of wireless power transfer for electric vehicles. |
| Mobile system battery charge. | High-power application. |
| Topology | f (kHz) | Po (kW) | k | η | Air Gap (mm) | Coupler | Studies |
|---|---|---|---|---|---|---|---|
| SS and LCC-LCC | 85 | 1 | 0.135 | 95% for SS 93% for LCC | 200 | Core: Circular–Circular | [182] |
| 79 | 7.7 | 0.188–0.311 | 96% for LCC | 200 | Core: DD–DD | [171,183] | |
| SS and LCL-LCL | 85 | 3.3 | 0.1 | 93.1% for SS 89.5% for LCL | 100 | Coreless: Rectangle–Rectangle | [131] |
| LCC-LCC | 79 | 7.7 | 0.18–0.32 | 96% | 200 | Core: Rectangle–Rectangle | [165] |
| 95 | 5.6 | 0.14–0.3 | 95.36% | 150 | Core: DD–DD | [184] | |
| 85 | 3.3 | 0.153 | 92.6% | 150 | Coreless: Circular–Circular | [125] | |
| 85 | 3 | 0.1877 | 95.5% | 150 | Core: DD–DD | [163] | |
| 85 | 1.4 | 0.13 | 89.78% | 150 | Core: Rectangle–Rectangle | [69] | |
| LCL-S and LCC-S | 140 | 1 | 0.18–0.32 | 93% similar LCC | 100 | Core: Circular–Circular | [99] |
| LCL | 85 | 5 | 0.37–0.54 | - | 240 | Core: DD–DDCore: Bipolar–Bipolar | [185] |
| SP | 23 | 2 | - | 92% | 100 | Core: Circular–Circular | [186] |
| SS | 85 | 20 | 0.4 | 80% | 100 | Coreless: Rectangle–Rectangle | [187] |
| 85 | - | - | 97.6% | 200 | Core: Rectangle–Rectangle | [188] |
| Converter Stage | Transmitter Rectifier | Inverter | Receiver Rectifier | Back-End Converter |
|---|---|---|---|---|
| Topologies | Rectifier/ PFC. |
|
|
|
| Control handles | Duty ratio of PFC. |
| No controls. | Duty ratio. |
| Studies | [101,191,192] | [193,194,195] | [191,192] | [196,197] |
| Topology | Single-phase inverter, driving single coil
| Single-phase full-bridge inverter, driving multiple coils
| Multi-phase bridge inverter, driving multiple coils |
| System complexity | Simple in implementation, but demands a lot of devices and communication between inverters. | It has a smaller number of inverter and device than the single coil drive arrangement, but the control complexity is high. | It is more complex for realizing soft-switch, but the device count and communication do not rely on them too much. |
| Segmentation controls | Open or closed loops segmentation control is used to make the detection. |
| According to the position of the coil, the phase switching occurs. |
| Studies | [97,193,203] | [80,98,204,205] | [101,197,200,206] |
| Single-Phase MC Topologies | Conventional | Z-Source | Six-Switch Buck–Boost | HFT-Isolated |
|---|---|---|---|---|
| Semiconductor devices | 4 bi-directional switches. | 5 bi-directional switches. | 6 unidirectional current flowing bi-directional voltage blocking switches. | 6 active switches. |
| Energy storage elements | None. | Two capacitors and two inductors. | One inductor. |
|
| Merits |
|
|
|
|
| Challenges |
|
| Stored energy component losses. |
|
| Studies | [215] | [216] | [221] | [222] |
| Three-Phase MC Topologies | Direct | Sparse | Very Sparse | Ultra-Sparse | Z-Source |
|---|---|---|---|---|---|
| Semiconductor devices | 9 bi-directional switches. | 15 IGBTs and three diodes. | 12 IGBTs and 18 diodes. | 9 IGBTs and 9 diodes. | 21 IGBTs. |
| Energy storage elements | None. | None. | None. | None. | 3 inductors and 3 capacitors. |
| Merits |
|
|
|
|
|
| Challenges |
|
| High conduction loss. | Unidirectional power flow. | Higher size cost and losses. |
| Studies | [223,230] | [225,231] | [226,232] | [227,228,233] | [218,229] |
| Controlled Component | Controlled Parameter | Kind of Control | Applications | Studies |
|---|---|---|---|---|
| Converter | Inverter frequency and dc-dc converter duty cycle | CC and CV | Stationary charging | [247] |
| Inverter | Inverter frequency and duty cycle | Maximum efficiency CC | Stationary charging | [253] |
| Inverter | Inverter frequency and duty cycle | Maximum efficiency | Stationary charging | [193] |
| Inverter | Inverter phase-shift | Maximum efficiency | Stationary charging | [248] |
| Inverter | Inverter phase-shift | CP | Stationary charging | [249] |
| Inverter | Inverter duty cycle | CV | Stationary and dynamic charging | [250] |
| Inverter | Inverter frequency | CP with ZPA | Stationary and dynamic charging | [252] |
| Controlled Component | Controlled Parameter | Kind of Control | Applications | Studies |
|---|---|---|---|---|
| Receiver dc-dc converter | Duty cycle | Maximum power transfer | Static | [258] |
| Receiver rectifier | Phase controller angle (α) and conduction angle (β) | CV | Static | [261] |
| Receiver rectifier | Pulse density modulation (PDM) | CV with soft switching | Static | [262] |
| Receiver dc-dc converter | Duty cycle | Maximum efficiency | Dynamic | [255] |
| Receiver rectifier | Pulse density modulation (PDM) | CV with ZVS and ZCS | Dynamic | [263] |
| Controlled Component | Controlled Parameter | Kind of Control | Applications | Studies |
|---|---|---|---|---|
| Transmitter inverter and receiver rectifier | Transmitter and receiver pulse width | CC-CV | Static | [105] |
| Transmitter inverter and receiver charging protection circuit | Transmitter inverter phase-shift and receiver hysteresis control | CC-CV | Static | [264] |
| Transmitter and receiver dc-dc converters | Transmitter voltage, charging voltage, and efficiency | Maximum efficiency | Static | [145] |
| Transmitter and receiver dc-dc converters | Transmitter voltage, charging voltage, and efficiency | Maximum efficiency | Static | [265] |
| Transmitter and receiver dc-dc converters | Transmitter voltage, charging voltage, and efficiency | Maximum efficiency | Static | [266] |
| Transmitter inverter and receiver rectifier | Transmitter voltage, charging voltage, and efficiency | Maximum efficiency | Static | [271] |
| Transmitter PFC, transmitter inverter, and receiver rectifier | PFC duty cycle, inverter mode switching, rectifier duty cycle, and phase angle | Maximum efficiency | Static | [114] |
| Transmitter inverter and receiver rectifier | Efficiency | Maximum efficiency CC/CV with ZVS | Static | [272] |
| Control Type | Converter | Merits | Demerits |
|---|---|---|---|
| Transmitter-side | dc-dc converter |
|
|
| Inverter |
|
| |
| Receiver-side | dc-dc converter |
| The inability to control charging power and efficiency at the same time. |
| Controlled rectifier |
| Synchronization between the ac signal and the controller is required. | |
| Dual-side | - |
| In most strategies communications are needed. |
| Parameter | Power (kW) | Frequency | Air Gap | Efficiency | Transmitter | Receiver | Misalignment | Studies | |
|---|---|---|---|---|---|---|---|---|---|
| KAIST | G1 | 3 | 20 kHz | 10 mm | 88% | E-type | E-type | ~3 mm | [74,283] |
| G2 | 6 | 20 kHz | 170 mm | 72% | U-type | Flat-type | ~230 mm | [74,75] | |
| G3 | 15 | 60 kHz | 120 mm | 80% | W-type | DD coil | – | [74] | |
| G4 | 27 | – | 200 mm | 74% | I-type | DD coil | 240 mm | [36,68] | |
| G5 | 22 | – | 200 mm | 71% | S-type | DD coil | 300 mm | [36,74] | |
| G6 | 3.3 | 85 kHz | 100–300 mm | 83% | W-type with ferrite plate | Rectangular | 700 mm | [278] | |
| ORNL | 1.5 | 23 kHz | 100 mm | 75% | Circular with ferrite bars | Circular with ferrite bars | – | [186] | |
| 20 | 22 kHz | 162 mm | 93% | Rectangular with ferrite core | Rectangular with ferrite bars | 150 mm | [284] | ||
| UoA | 20–30 | 12.9 kHz | 50 mm | 85% | – | – | 50 mm | [18,32,285] | |
| USU | 25 | 20 kHz | – | 86% | Circular with ferrite bars | Circular with ferrite bars | 150 mm | [238] | |
| CW | 120 | 15–20 kHz | 40 mm | 90% | E-type | F-type | – | [32] | |
| NRC | 1 | 90 kHz | 100 mm | >90% | Rectangular | Circular with ferrite core | – | [286] | |
| NCSU | 0.3 | 100 kHz | 170 mm | 77–90% | Circular | Circular with ferrite plate | ~30 mm | [79,287] | |
| WAVE | 50 | 20 kHz | 152–254 mm | 90% | – | – | ~254 mm | [32,288] | |
| JRTRI | 50 | 10 kHz | 7.5 mm | – | Bipolar | DD coil | – | [289] | |
| Bombardier | 200 | 20 kHz | 60 mm | 90% | – | – | A few mm | [32,290] | |
| FDIAU | 80 | 20 kHz | 100 mm | 88–90% | – | – | – | [19] | |
| PATH | 60 | 76 mm | 60% | – | – | – | [273] | ||
| Developer | Name | Description | Status | Date | References |
|---|---|---|---|---|---|
| SAE | J2954 | Introduces guidelines which determine acceptable criteria for interoperability principle, EMFs compatibility, minimum performance, safety degree, and testing for wireless charging of light duty and plug-in EVs. This version considers unidirectional charging operation, from grid to vehicle (G2V). | Published | 2020 | [31,291] |
| J1773 | Defines the minimum accepted limits of interface requirements for EVs, in addition to inductive charging in areas of the same geographical nature. It is recommended to transmit power at higher frequencies than power line frequencies. | Stabilized | 2014 | [292] | |
| J2847/6_202009 | Defines the accepted limits for communication between an EV and an inductive battery charging system for WPT. | Revised | 2020 | [293] | |
| J2836/6_201305 | Defines the communication cases that are used for EVs and the wireless EV supply equipment (EVSE) for wireless power transmission as defined in SAE J2954. It provides the communication requirements between the on-board charging system and wireless EVSE to support WEVSE detection, charging operation, and charging operation monitoring. | Revised | 2021 | [294] | |
| IEC | IEC 61980-1 | Universal requirements. It introduces recommendations that apply to equipment to transmit power wirelessly using the inductive charging concept, to supply power to storage devices such as insulating batteries or to supply the power to the grid when needed. The areas presented in this issue are the characteristics for the desired safety limit of a supply device, communications between the EV and transmitter device to enable and control the WPT system, and specific EMFs compatibility requirements for a supply device. | Active, most current | 2020 | [295,296] |
| IEC/TS 61980-2 | Presents particular conditions for communication between EVs and infrastructure in order to facilitate the charging in a WPT system. Work has also been done to reach the communication requirements for charging vehicles with two and three wheels, and communication requirements during bidirectional charging. This release does not address safety requirements during maintenance or for trolley buses and trucks designed for off-road use. | Active, most current | 2019 | [297] | |
| IEC/TS 61980-3 | Specifies special requirements for the magnetic field wireless power transfer (MF-WPT) generated in the wireless charging system. Work has also been done to reach the communications requirements for required safety by a MF-WPT system, the requirements to assure efficient and safe MF-WPT power transfer, and specific EMFs compatibility requirements for MF-WPT systems. | Active, most current | 2019 | [298] | |
| JARI | G106:2000 | Provides the general requirements to provide inductive charging for EVs. | Published | 2000 | [299] |
| G108:2001 | Provides the software interface for the inductive charging system of EVs. | 2021 | |||
| G109:2001 | Describes the use of the IPT system to transfer power wirelessly. It also defines universal requirements for the wireless charging process. | 2001 | [291,300] | ||
| UL | UL9741 | Provides universal requirements for the interchange charging operation considering the bidirectional charging process to supply the power to the grid and feed traditional loads. | Active | 2017 | [9,301] |
| UL-SUBJECT 9741 | Defines the requirements for each unidirectional and bidirectional operation for electric vehicles. Unidirectional operation supplies power from the utility grid to charge the electric vehicle battery. Bidirectional operation serves the same function but additionally provides power to the utility grid from the electric vehicle. | Active | 2021 | [302] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohamed, A.A.S.; Shaier, A.A.; Metwally, H.; Selem, S.I. An Overview of Dynamic Inductive Charging for Electric Vehicles. Energies 2022, 15, 5613. https://doi.org/10.3390/en15155613
Mohamed AAS, Shaier AA, Metwally H, Selem SI. An Overview of Dynamic Inductive Charging for Electric Vehicles. Energies. 2022; 15(15):5613. https://doi.org/10.3390/en15155613
Chicago/Turabian StyleMohamed, Ahmed A. S., Ahmed A. Shaier, Hamid Metwally, and Sameh I. Selem. 2022. "An Overview of Dynamic Inductive Charging for Electric Vehicles" Energies 15, no. 15: 5613. https://doi.org/10.3390/en15155613
APA StyleMohamed, A. A. S., Shaier, A. A., Metwally, H., & Selem, S. I. (2022). An Overview of Dynamic Inductive Charging for Electric Vehicles. Energies, 15(15), 5613. https://doi.org/10.3390/en15155613