
Preliminary Experimental Research on the Influence of Counterbalance Valves on the Operation of a Heavy Hydraulic Manipulator during Long-Range Straight-Line Movement




Abstract
:1. Introduction
2. Methods
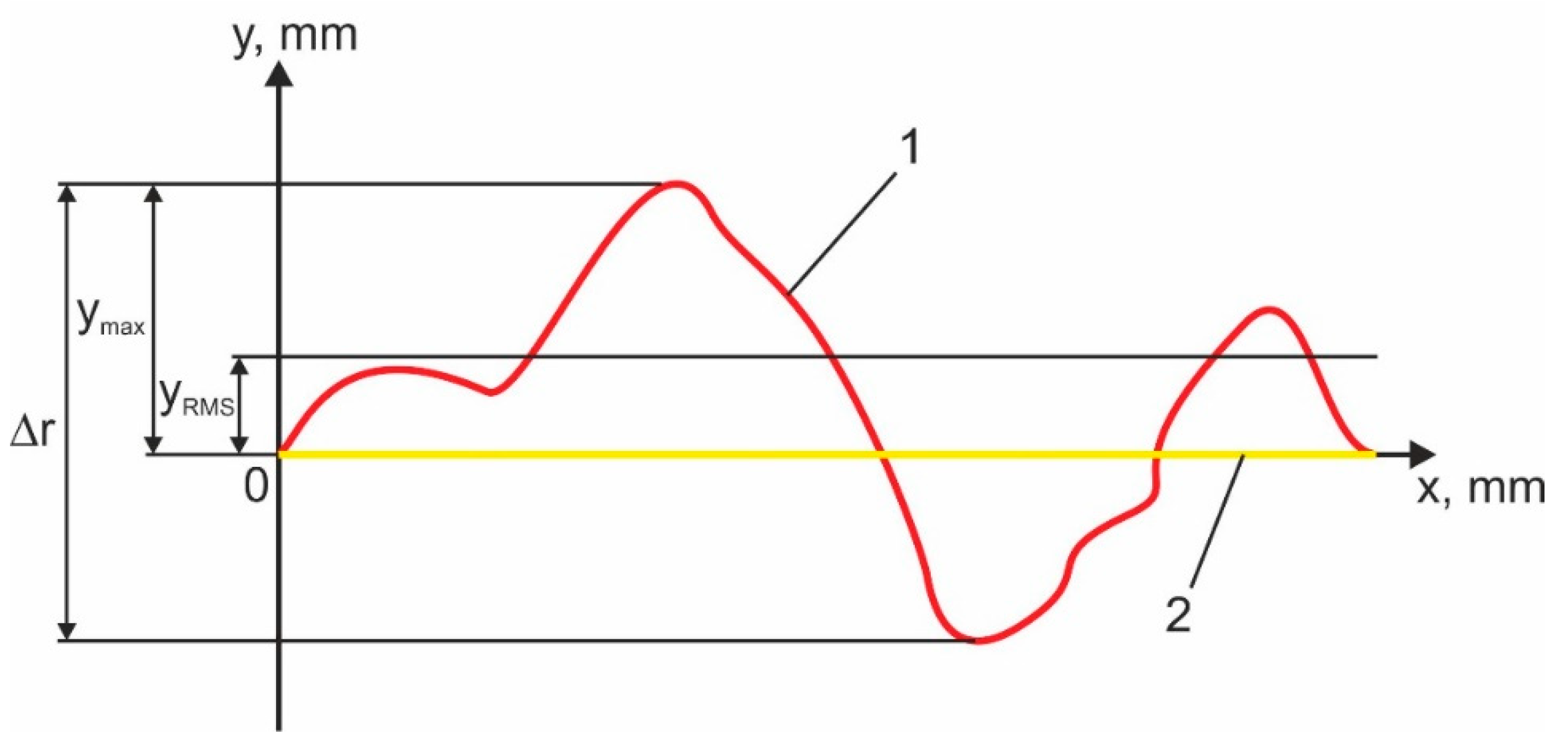
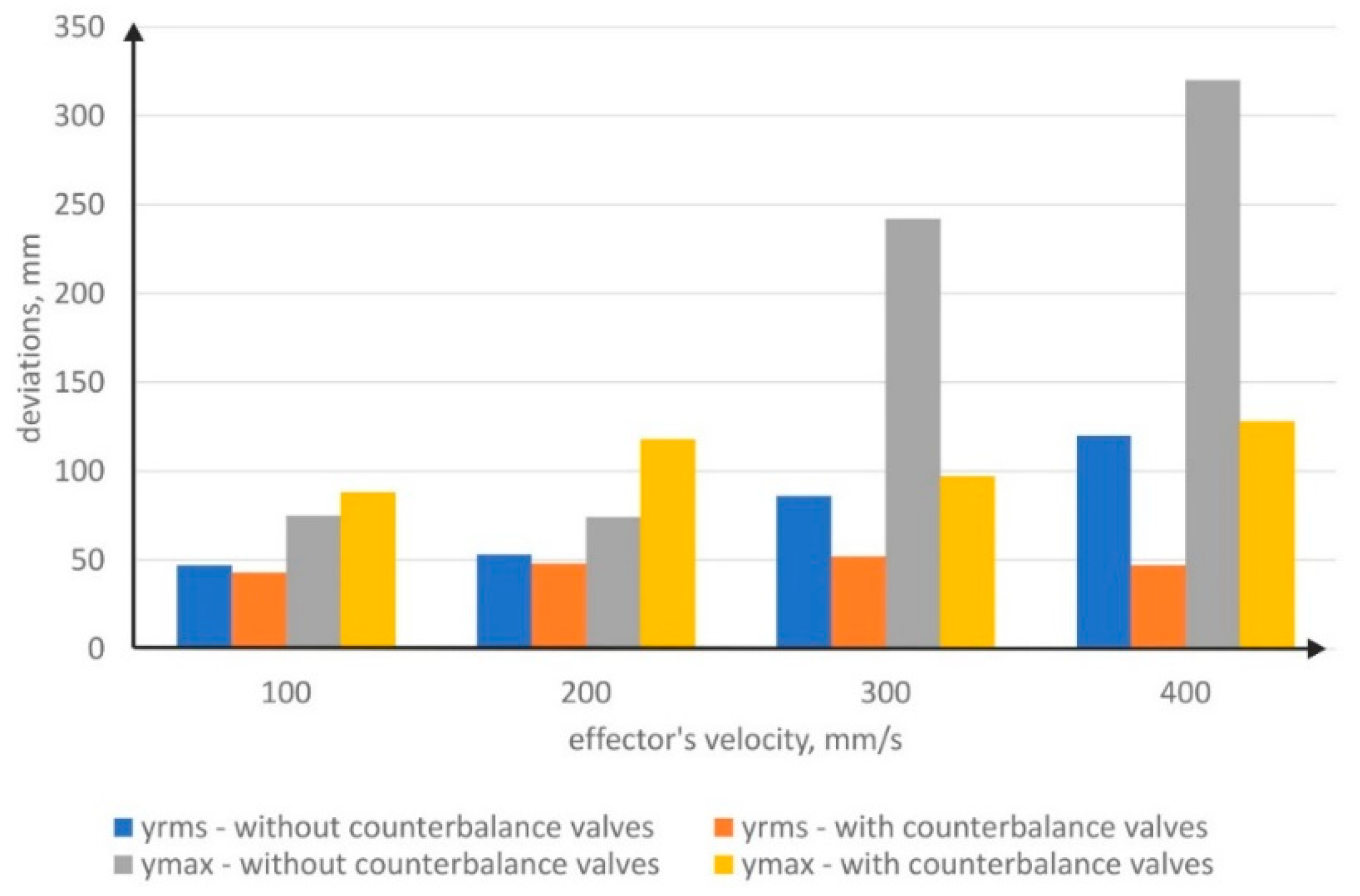
- The root mean square deviation of the gripper trajectory from the assumed horizontal trajectory yRMS,
- The absolute value of the maximum deviation of the gripper trajectory from the assumed horizontal trajectory ymax,
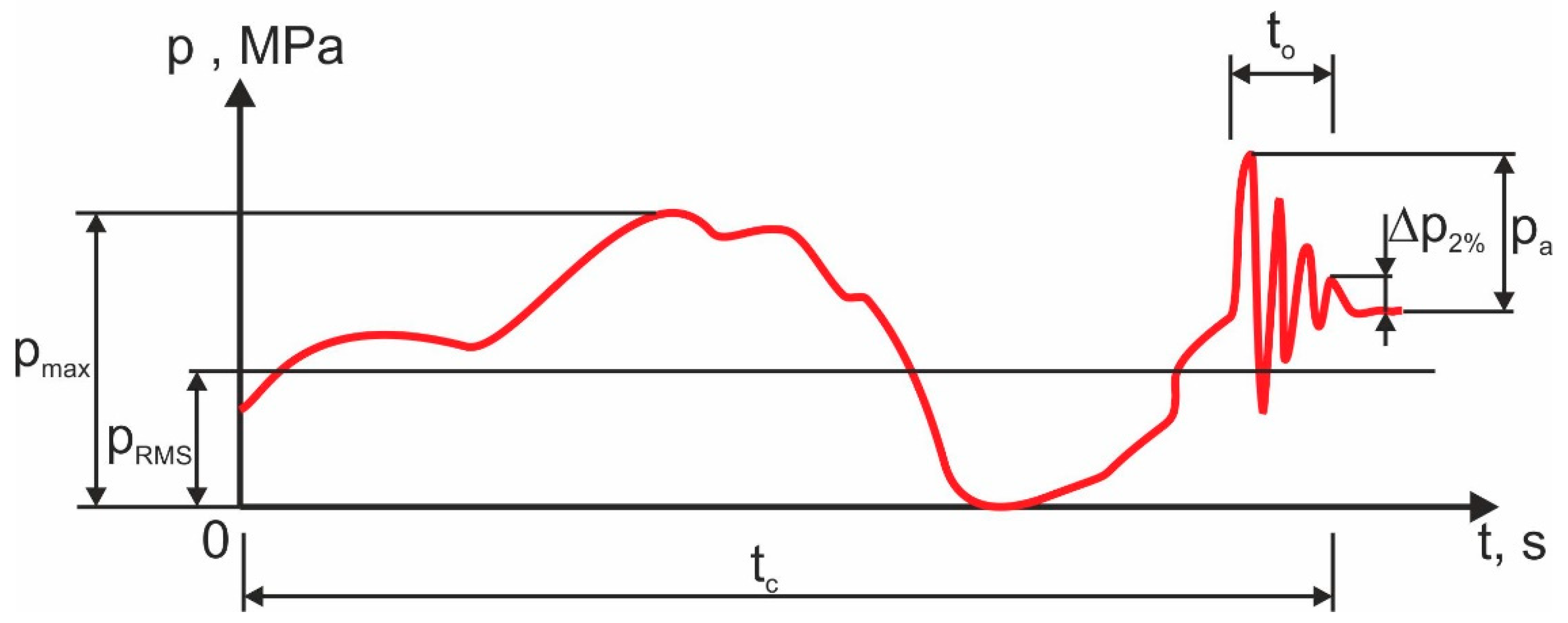
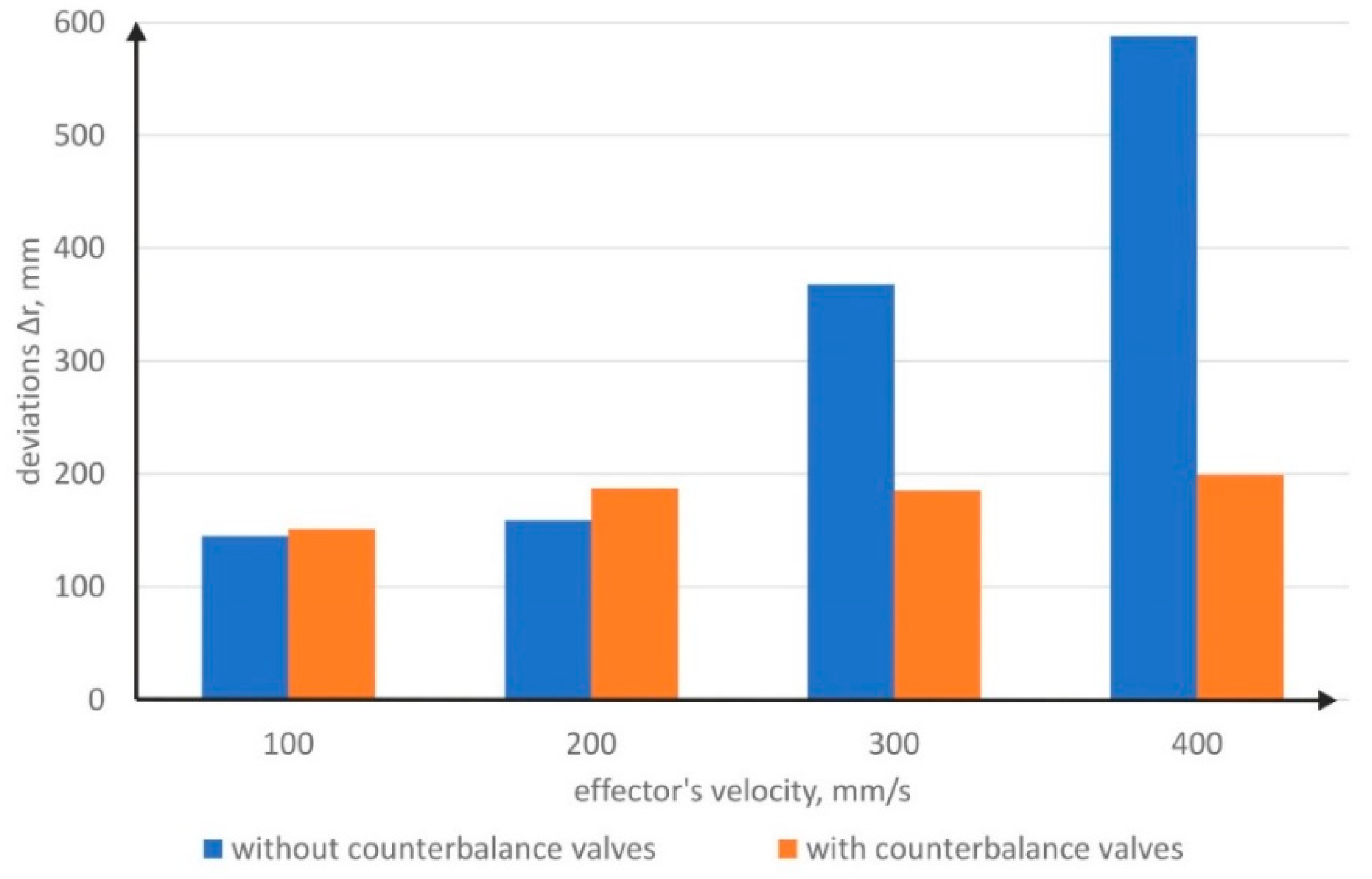
- The deviation range Δr.In turn, for the assessment of pressures, the following were adopted (Figure 5):
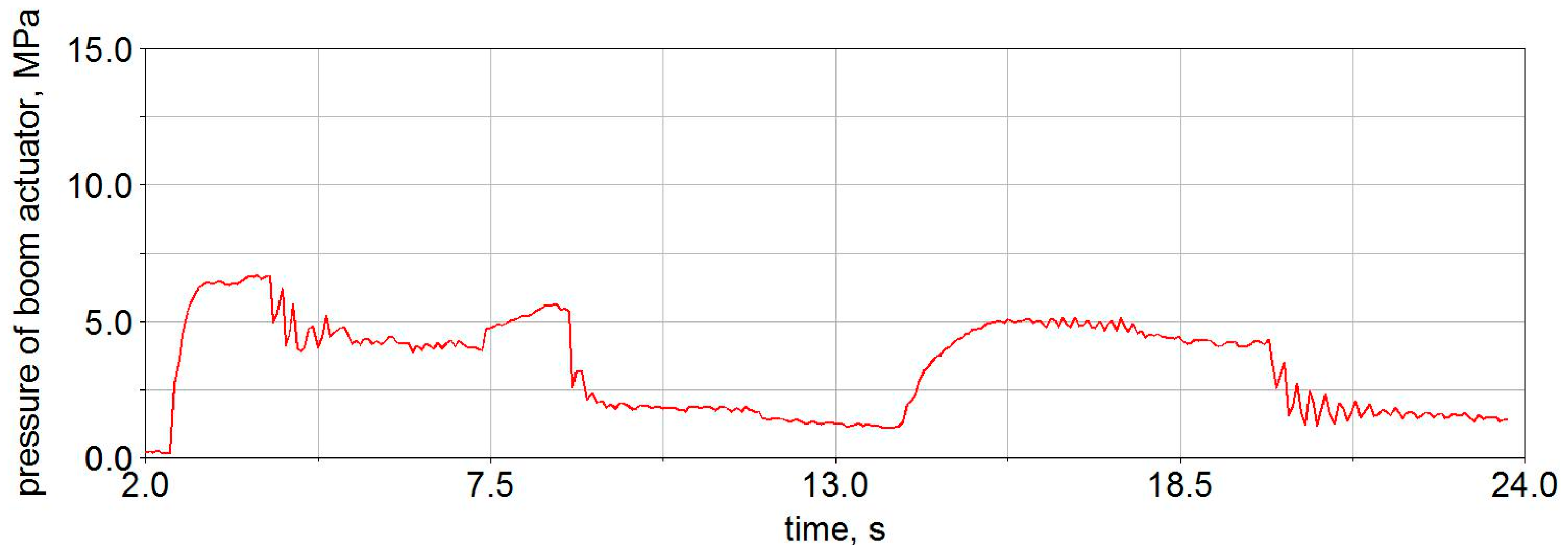
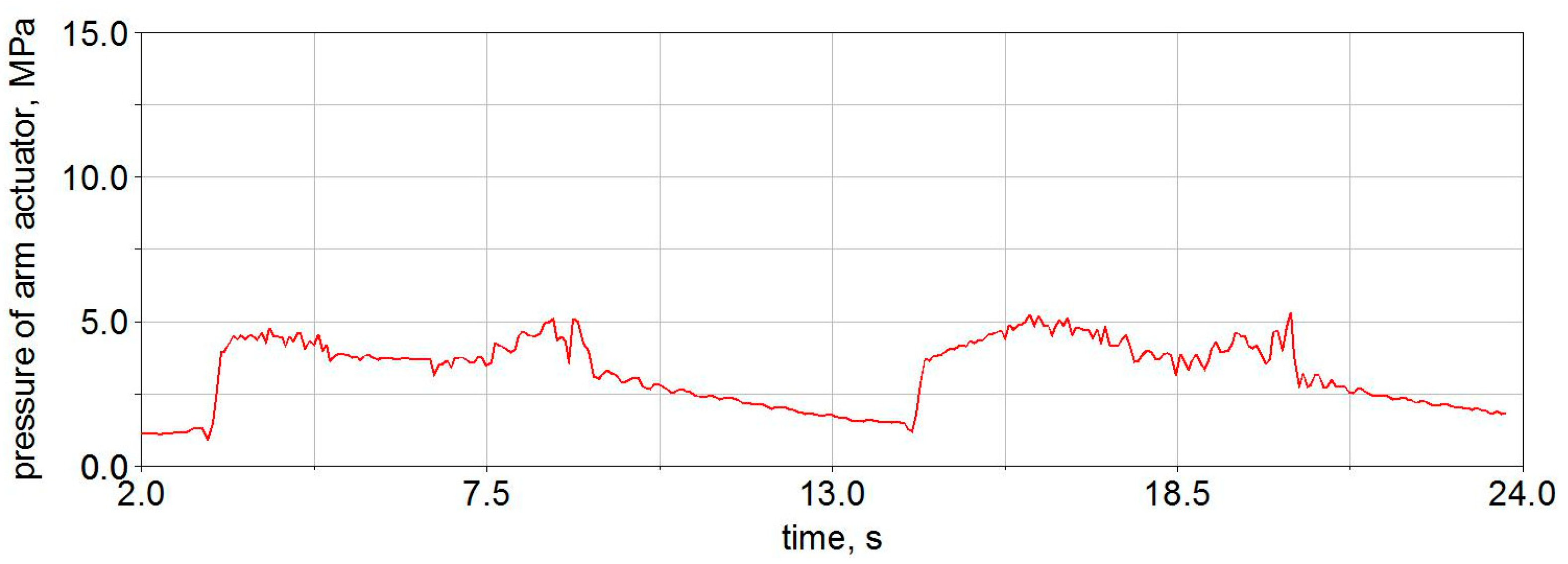
- The root mean square pressure from the executed movement pRMS,
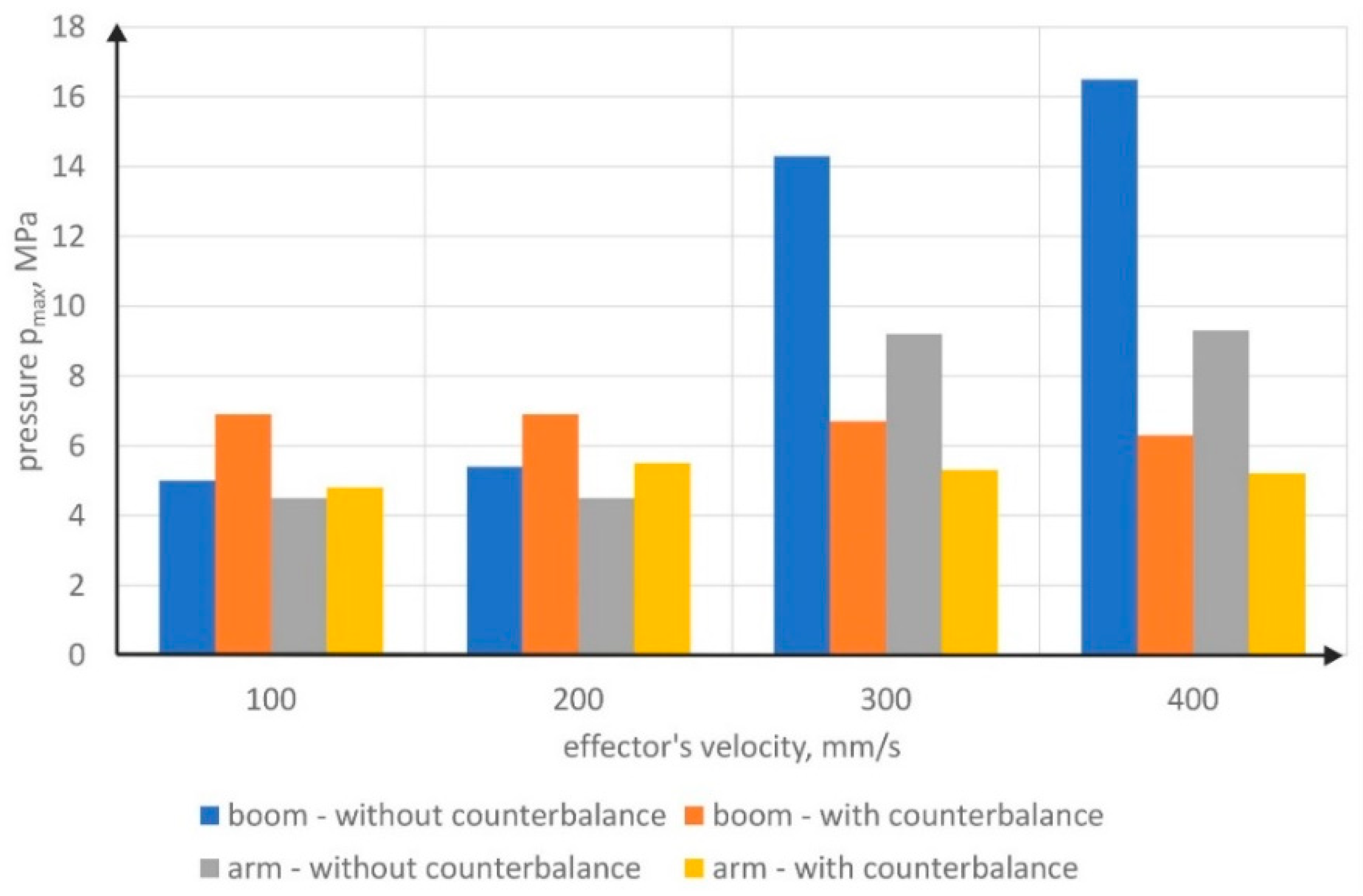
- The maximum value of the pressure from the executed movement pmax,
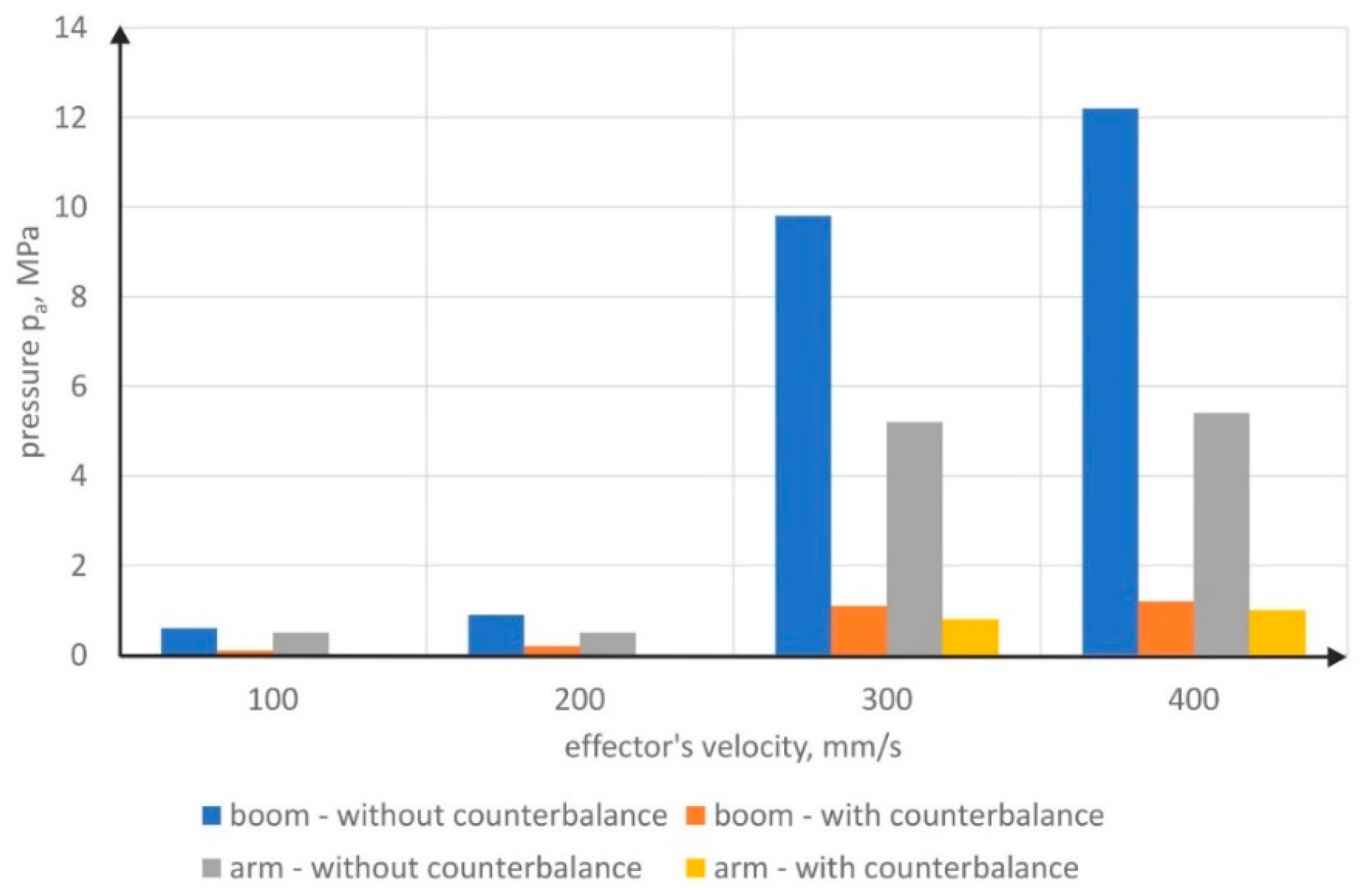
- The pressure pulsation during the effector stop phase pa,
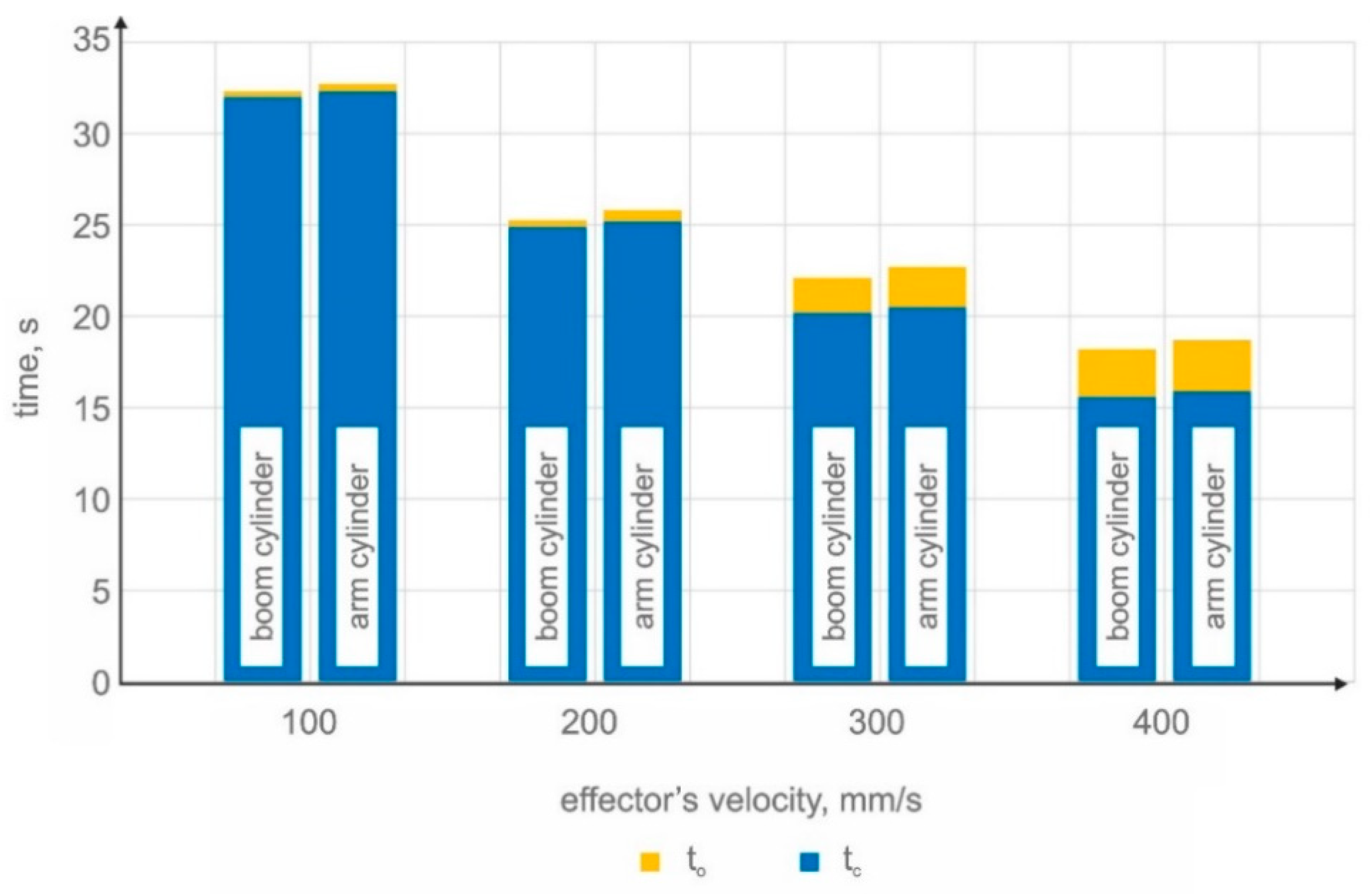
- The pressure pulsation time, to when the gripper was stopped (where the pressure amplitude, Δp2%, equal to 2% of the nominal pressure, pN, was assumed at the end of the pulsation time, pN = 17 MPa, that is, Δp2% = 0.34 MPa),
- The time of a single working cycle tc,
- The frequency of pressure oscillations f during the effector stop phase,
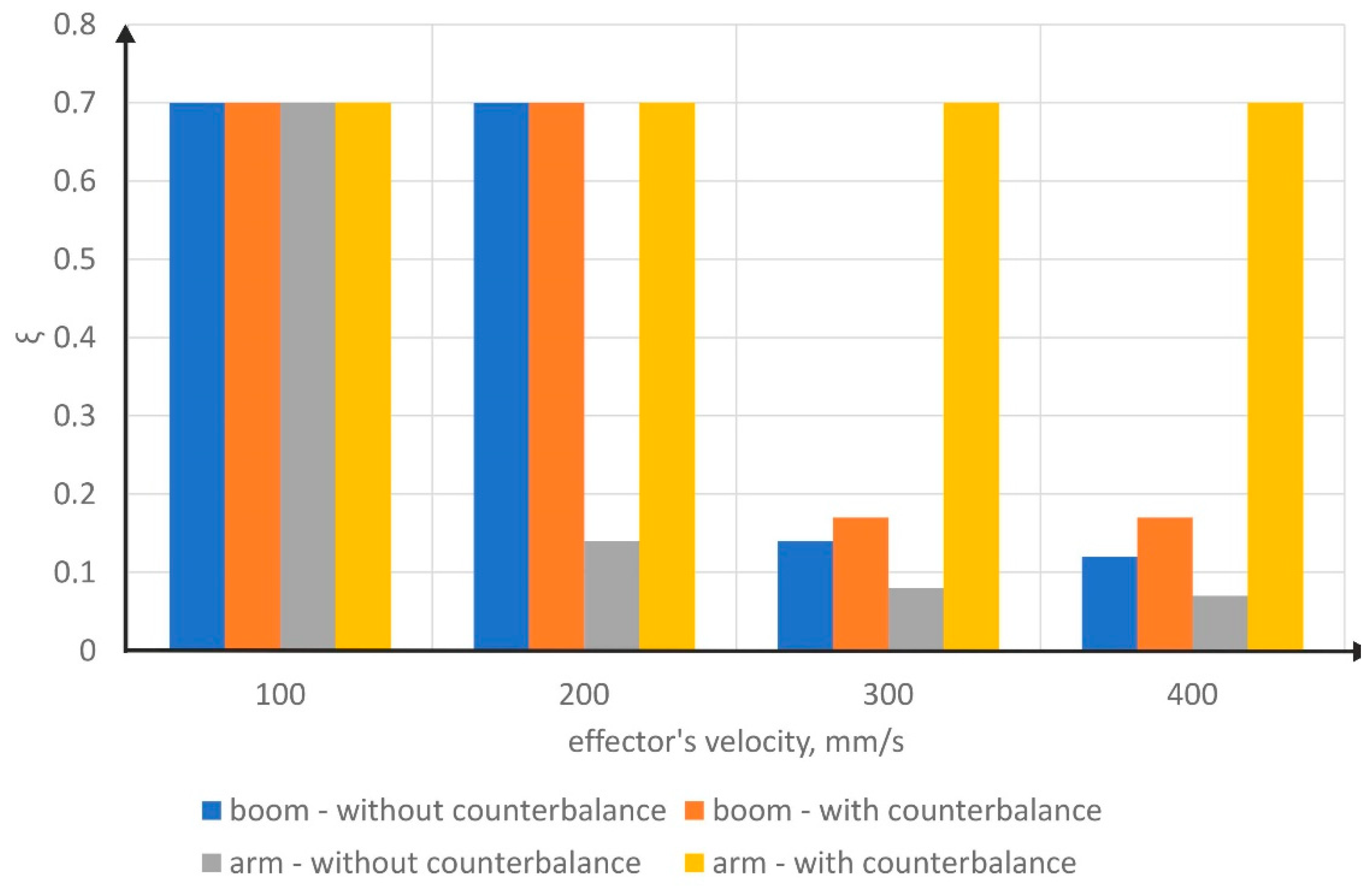
- The damping ratio ζ of pressure oscillations during the effector stop phase, which was defined according to [39]
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, Q.; Chen, J.; Huo, L.; Kong, F.; Du, L.; Cui, S.; Zhao, Y.; Tang, Y. 7000M pressure experiment of a deep-sea hydraulic manipulator system. In Proceedings of the 2014 Oceans-St. John’s, St. John’s, NL, Canada, 14–19 September 2014; pp. 1–5. [Google Scholar]
- Bandala, M.; West, C.; Monk, S.; Montazeri, A.; Taylor, C.J. Vision-based assisted tele-operation of dual-arm hydraulically actuated robot for pipe cutting and grasping in nuclear environments. Robotics 2019, 8, 42. [Google Scholar] [CrossRef] [Green Version]
- Cieślik, K.; Konopka, S. Concept and preliminary research of anthropomorphic manipulator with hydrostatic drive system for mobile robot. In Proceedings of the 21st International Conference on Methods and Models in Automation and Robotics, Miedzyzdroje, Poland, 29 August–1 September 2016; pp. 1154–1159. [Google Scholar]
- Łopatka, M.J.; Muszyński, T.; Rubiec, A. Simulation identification of Fire Rescue Robot suspension loads. In Proceedings of the 18th International Conference on Method and Models in Automation and Robotics, Miedzyzdroje, Poland, 26–29 August 2013; pp. 408–413. [Google Scholar]
- Dabrowska, A.; Przybysz, M.; Rubiec, A. Hydropneumatic suspension efficiency in terms of the teleoperated unmanned ground vehicle tests. In Proceedings of the 10th International Conference on Intelligent Technologies in Logistics and Mechatronics Systems ITELMS, Kaunas, Lithuania, 21–22 May 2015; pp. 110–116. [Google Scholar]
- Łopatka, M.J.; Muszyński, T.; Rubiec, A. Loads analysis of skid steer robot drive system. In Proceedings of the 18th International Conference on Method and Models in Automation and Robotics, Miedzyzdroje, Poland, 26–29 August 2013; pp. 362–367. [Google Scholar]
- Łopatka, M.J.; Muszyński, T.; Rubiec, A.; Sprawka, P. Preliminary Simulations of High Mobility IED Resistance Suspension with Casting Arms. Solid State Phenom. 2014, 210, 115–121. [Google Scholar] [CrossRef]
- Varga, B.; Shahirpour, A.; Schwab, S.; Hohmann, S. Control of large vehicle-manipulators with human operator. IFAC PapersOnLine 2019, 30, 373–378. [Google Scholar] [CrossRef]
- Sreekanth, N.; Dinesan, A.; Nair, A.R.; Udupa, G.; Tirumaladass, V. Design of robotic manipulator for space applications. Mater. Today Proc. 2021, 46, 4962–4970. [Google Scholar] [CrossRef]
- Zhou, S.; Shen, C.; Xia, Y.; Chen, Z.; Zhu, S. Adaptive robust control design for underwater multi-DoF hydraulic manipulator. Ocean. Eng. 2022, 248, 1–14. [Google Scholar] [CrossRef]
- Lampinen, S.; Koivumäki, J.; Mattila, J. Full-Dynamics-Based Bilateral Teleoperation of Hydraulic Robotic Manipulators. In Proceedings of the IEEE 14th International Conference on Automation Science and Engineering, Munich, Germany, 20–24 August 2018; pp. 20–24. [Google Scholar]
- Montazeri, A.; West, C.; Monk, S.D.; Taylor, C.J. Dynamic modelling and parameter estimation of a hydraulic robot manipulator using a multi-objective genetic algorithm. Int. J. Control. 2017, 90, 661–683. [Google Scholar] [CrossRef] [Green Version]
- Yoshinada, H.; Takeda, S.; Yokota, S. A Study on the Large-Scale Bilateral Manipulator. Trans. Jpn. Fluid Power Syst. Soc. 2013, 44, 55–63. [Google Scholar] [CrossRef]
- Yoon, J.; Manurung, A. Development of an intuitive user interface for a hydraulic backhoe. Autom. Constr. 2010, 19, 779–790. [Google Scholar] [CrossRef]
- Huang, J.; Huo, W.; Xu, W.; Mohammed, S.; Amirat, Y. Control of Upper-Limb Power-Assist Exoskeleton Using A Human-Robot Interface Based on Motion Intention Recognition. IEEE Trans. Autom. Sci. Eng. 2015, 12, 1–14. [Google Scholar] [CrossRef]
- Hirche, S.; Buss, M. Human-Oriented Control for Haptic Teleoperation. Proc. IEEE 2012, 100, 623–647. [Google Scholar] [CrossRef]
- Kim, I.; Kanno, T.; Tadano, K.; Kawashima, K. Research on a Master Manipulator Using an Isometric Interface for Translation in Robotic Surgery. Int. J. Adv. Robot. Syst. 2015, 12, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Ahn, B.; Ko, S.Y.; Yang, G.H. Compliance Control of Slave Manipulator Using EMG Signal for Telemanipulation. Appl. Sci. 2020, 10, 1431. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Liu, W.; Gao, L.; Li, L.; Li, Z. The master adaptive impedance control and slave adaptive neural network control in underwater manipulator uncertainty teleoperation. Ocean. Eng. 2018, 165, 465–479. [Google Scholar] [CrossRef]
- Galicki, M. Optimal sliding control of mobile manipulators, Bulletin of the Polish Academy of Sciences. Tech. Sci. 2019, 67, 777–788. [Google Scholar]
- Hu, H.; Li, J.; Xie, Z.; Wang, B.; Liu, H.; Hirzinger, G. A Robot Arm/Hand Teleoperation System with Telepresence and Shared Control. In Proceedings of the International Conference on Advanced Intelligent Mechatronics, Monterey, CA, USA, 24–28 July 2005; pp. 24–28. [Google Scholar]
- Kim, D.; Kim, J.; Lee, K.; Park, C.; Song, J.; Kang, D. Excavator tele-operation system using a human arm. Autom. Constr. 2009, 18, 173–182. [Google Scholar] [CrossRef]
- Osafo-Yeboah, B.; Jiang, S.; Delpish, R.; Jiang, Z.; Ntuen, C. Empirical study to investigate the range of force feedback necessary for best operator performance in a haptic controlled excavator interface. Int. J. Ind. Ergon. 2013, 43, 197–202. [Google Scholar] [CrossRef]
- Manjunath, T.C.; Kumar, S.S.; Deivakani, M.; Carmichael, M.J.; Gomathy, S.; Sabarimuthu, M.; Poornima, J.J. Design & development of mathematical model for constructing a straight-line motion/trajectory for any mechanical robotic manipulator using bounded deviation concept along with its simulation by knot points. Mater. Today Proc. 2021. [Google Scholar] [CrossRef]
- Bereznev, V.A. The principle of dividing feasible trajectories in robot control problem. Procedia Comput. Sci. 2021, 186, 456–459. [Google Scholar] [CrossRef]
- Morosi, F.; Rossoni, M.; Caruso, G. Coordinated control paradigm for hydraulic excavator with haptic device. Autom. Constr. 2019, 105, 1–20. [Google Scholar] [CrossRef]
- Bachman, P.; Milecki, A. Investigation of electrohydraulic drive control system with the haptic joystick. Acta Mech. Et Autom. 2018, 12, 5–10. [Google Scholar] [CrossRef] [Green Version]
- Mattila, J.; Koivumäki, J.; Caldwell, D.G.; Semini, C. A survey on control of hydraulic robotic manipulators with projection to future trends. IEEE-ASME Trans. Mechatron. 2017, 22, 669–680. [Google Scholar] [CrossRef]
- Kozlov, L.G.; Polishchuk, L.K.; Piontkevych, O.V.; Korinenko, M.P.; Horbatiuk, R.M.; Komada, P.; Orazalieva, S.; Ussatova, O. Experimental research characteristics of counterbalance valve for hydraulic drive control system of mobile machine. Przegląd Elektrotechniczny 2019, 95, 104–109. [Google Scholar] [CrossRef] [Green Version]
- Jin, M.; Wang, Q. Energy-saving control for electro-hydraulic systems under time-varying negative loads. J. Syst. Control. Eng. 2018, 232, 608–621. [Google Scholar] [CrossRef]
- Hansen, M.R.; Andersen, T.O. Controlling a Negative Loaded Hydraulic Cylinder Using Pressure Feedback, Modeling. Identif. Control. 2010, 242–248. Available online: https://vbn.aau.dk/en/publications/controlling-a-negative-loaded-hydraulic-cylinder-using-pressure-f (accessed on 6 June 2022).
- Nordhammer, P.A.; Bak, M.K.; Hansen, M.R. A Method for Reliable Motion Control of Pressure Compensated Hydraulic Actuation with Counterbalance Valves. In Proceedings of the 12th International Conference on Control, Automation and Systems, Jeju, Korea, 17–21 October 2012; pp. 759–763. [Google Scholar]
- Helian, B.; Chen, Z.; Yao, B. Energy-saving and accurate motion control of a hydraulic actuator with uncertain negative loads. Chin. J. Aeronaut. 2020, 34, 253–264. [Google Scholar] [CrossRef]
- Ritelli, G.F.; Vacca, A. Energetic and dynamic impact of counterbalance valves in fluid power machines. Energy Convers. Manag. 2013, 76, 701–711. [Google Scholar] [CrossRef]
- Altare, G.; Vacca, A. A design solution for efficient and compact electro-hydraulic actuators. Procedia Eng. 2015, 106, 8–16. [Google Scholar] [CrossRef] [Green Version]
- Jalayeri, E.; Imam, A.; Sepehri, N. A throttle-less single rod hydraulic cylinder positioning system for switching loads. Case Stud. Mech. Syst. Signal Process. 2017, 1, 27–31. [Google Scholar] [CrossRef] [Green Version]
- Stawiński, Ł. Experimental and modeling studies of hydrostatic systems with the counterbalance valves which are used in hydraulic lifting systems with passive and active load. Maint. Reliab. 2016, 18, 406–412. [Google Scholar] [CrossRef]
- Jensen, K.J.; Ebbesen, M.K.; Hansen, M.R. Anti-swing control of a hydraulic loader crane with a hanging load. Mechatronics 2021, 77, 1–13. [Google Scholar] [CrossRef]
- Cannon, R.H., Jr. Dynamics of Physical Systems; Dover Publications: New York, NY, USA, 2003. [Google Scholar]
- Uicker, J.J.; Pennock, G.R.; Shigley, J.E. Theory of Machines and Mechanisms; Oxford University Press: Oxford, UK, 2018. [Google Scholar]
- Ogata, K. Modern Control Engineering, 5th ed.; Prentice Hall: Hoboken, NJ, USA, 2010. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value/Specification |
|---|---|
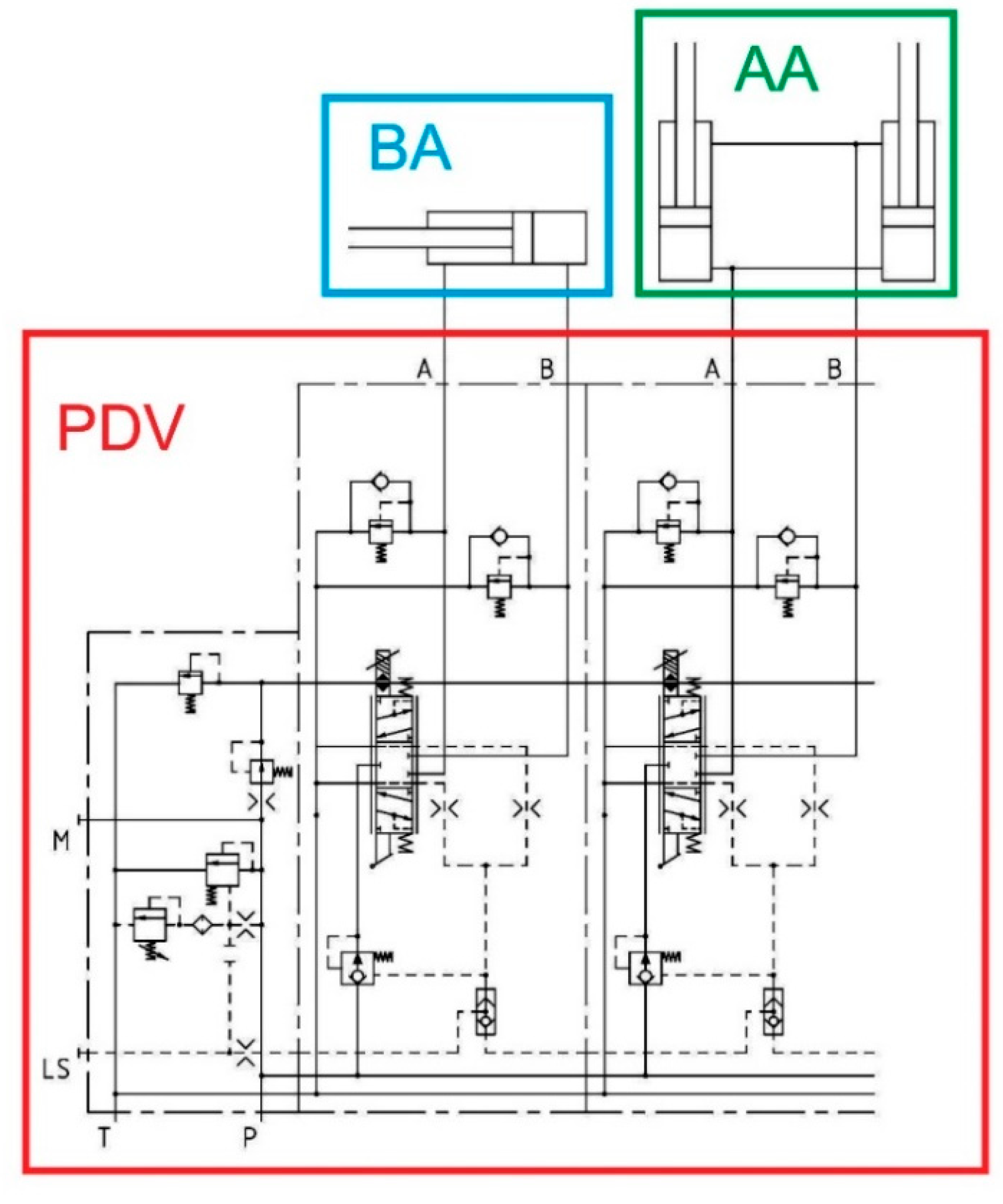
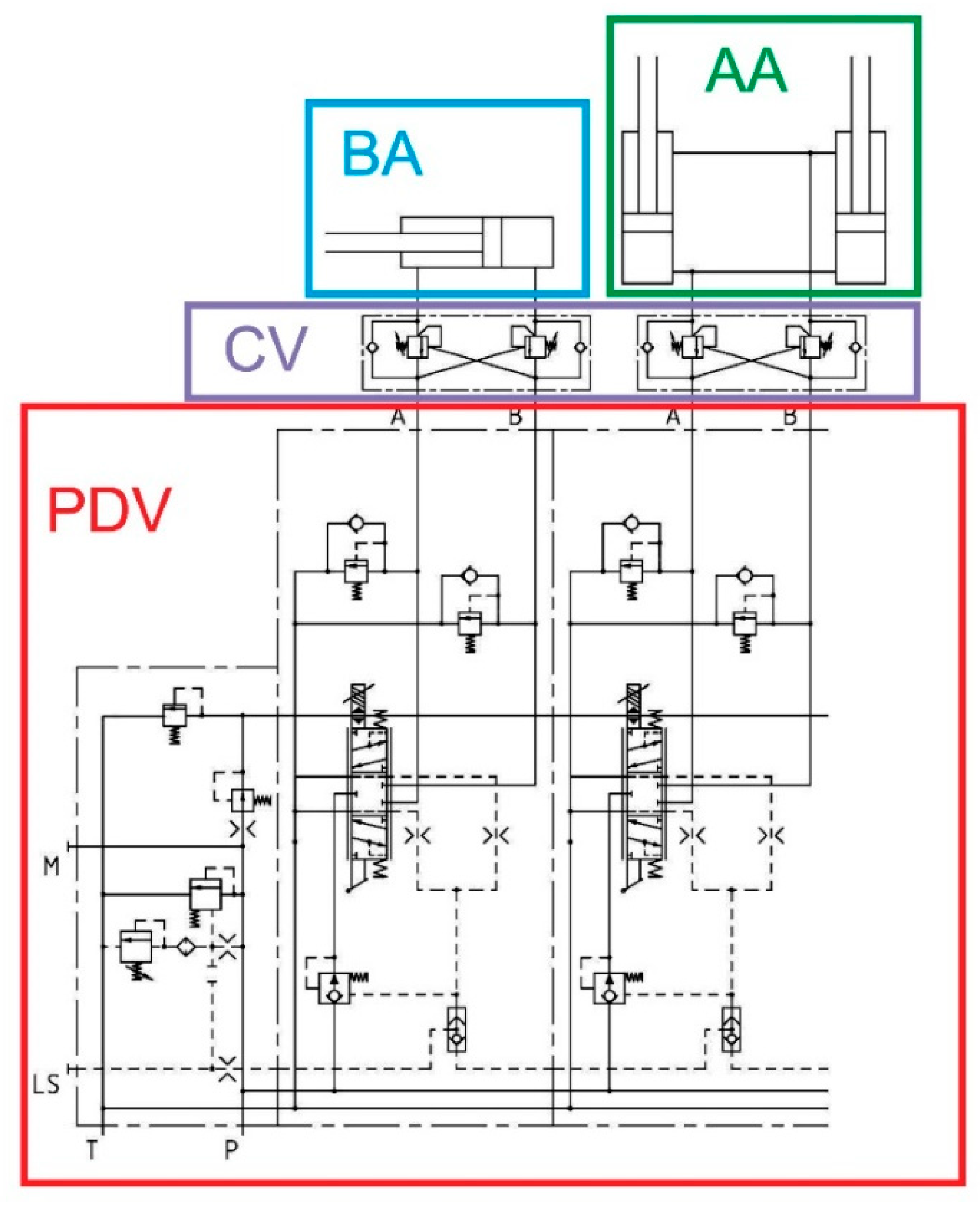
| Boom actuator, BA | Piston diameter 100 mm, rod diameter 56 mm, stroke 550 mm |
| Long arm actuator, AA | Piston diameter 63 mm, rod diameter 45 mm, stroke 600 mm |
| Counterbalance valve, CV | Nominal flow 60 dm3/min |
| Proportional directional valve, PDV | Nominal flow 100 dm3/min limited by spools size to 40 dm3/min |
| Draw-wire encoder | Measuring range 0–1250 mm, accuracy 0.02% |
| Pressure sensor | Measuring range 0–40 MPa, accuracy 0.05% |
| Parameter | Value, mm |
|---|---|
| w1 | 370 |
| w2 | 130 |
| h1 | 1190 |
| h2 | 500 |
| a1 | 1400 |
| a2 | 2500 |
| Hydraulic Cylinder | Proportional Gain, Kp | Integrated Gain, Ki | Derivative Gain, Kd |
|---|---|---|---|
| Boom (PID1) | 200 | 3 | 5 |
| Arm (PID2) | 200 | 3 | 5 |
| Hydraulic Cylinder | Variant of Hydrostatic Drive System | Frequency, Hz | |||
|---|---|---|---|---|---|
| 100 mm/s | 200 mm/s | 300 mm/s | 400 mm/s | ||
| Boom | with counterbalance valves | n/a | n/a | 1.7 | 1.7 |
| without counterbalance valves | n/a | n/a | 1.7 | 1.7 | |
| Arm | with counterbalance valves | n/a | n/a | n/a | n/a |
| without counterbalance valves | n/a | 2 | 2 | 2 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Łopatka, M.J.; Krogul, P.; Rubiec, A.; Przybysz, M. Preliminary Experimental Research on the Influence of Counterbalance Valves on the Operation of a Heavy Hydraulic Manipulator during Long-Range Straight-Line Movement. Energies 2022, 15, 5596. https://doi.org/10.3390/en15155596
Łopatka MJ, Krogul P, Rubiec A, Przybysz M. Preliminary Experimental Research on the Influence of Counterbalance Valves on the Operation of a Heavy Hydraulic Manipulator during Long-Range Straight-Line Movement. Energies. 2022; 15(15):5596. https://doi.org/10.3390/en15155596
Chicago/Turabian StyleŁopatka, Marian Janusz, Piotr Krogul, Arkadiusz Rubiec, and Mirosław Przybysz. 2022. "Preliminary Experimental Research on the Influence of Counterbalance Valves on the Operation of a Heavy Hydraulic Manipulator during Long-Range Straight-Line Movement" Energies 15, no. 15: 5596. https://doi.org/10.3390/en15155596
APA StyleŁopatka, M. J., Krogul, P., Rubiec, A., & Przybysz, M. (2022). Preliminary Experimental Research on the Influence of Counterbalance Valves on the Operation of a Heavy Hydraulic Manipulator during Long-Range Straight-Line Movement. Energies, 15(15), 5596. https://doi.org/10.3390/en15155596