1. Introduction
Designing an LFC system is a challenging task in the stable and safe operation of a power system, particularly an interconnected and multi-area power system. Frequency and voltage oscillations typically cause some negative effects on power systems and consumers. Deviation of the auxiliary power machines and generator sets from operational circumstances, reducing the mechanical performance, and affecting the overall economic operation of the power grid are some negative results of this issue [
1]. The objective of an LFC system is to damp the frequency and voltage fluctuations in an interconnected power system generated from changes in the connected load instant shifts. During the past few decades, the LFC system design has been studied in many works, by utilizing different control strategies, such as PI controller [
2,
3,
4,
5], fuzzy logic [
6,
7], neural network [
8], adaptive control [
9], and variable structure control [
10].
Moreover, it might be challenging to determine the exact values of some design model parameters. Furthermore, unpredictable changes in load demand are a normal issue in power systems. These problems will unavoidably have an impact on the stable and secure operation of the power systems. Therefore, an LFC system should be robust against parametric uncertainties and load disturbances. In [
11], a robust decentralized LFC system was suggested for interconnected power systems to regulate the area control error during uncertainties. In [
12], a robust controller based on the FO PID was presented for frequency control of an interconnected power system, and the optimal controller parameters were obtained through differential evolution algorithms. In [
13], coordination of conventional frequency and V2G controllers was designed for a robust LFC scheme for a wind farm-based smart grid. In [
14], a distributed robust model predictive controller was presented based on LMIs for the LFC system design issues of a multi-area interconnected power system.
Furthermore, delays raised by communication links among various control areas in s multi-area power system should be considered to avoid maloperation and instability of the LFC system. There are only a few solutions in the literature that considered the communication delay during the design of LFC systems. In [
15], a decentralized delay-independent and memory-less control strategy were proposed to design a load frequency control system that considered communication delays. In [
16], by considering the communication delays, a
two-term delay-dependent feedback control structure was designed for the LFC system of a power system with a multi-area network. However, the uncertainties of the power system were not considered in this research. In [
17], a robust
delayed state feedback controller was presented for the LFC of interconnected power systems which have parametric uncertainties and stochastic disturbances.
In practical situations,
synthesis is unable to fully satisfy all design requirements. For example, using linear–quadratic regulator terminology allows for a more natural expression of noise reduction or regulating against unpredictable disturbances. In addition to this, in most cases, a well-designed controller should operate within the lowest operation time, with a well-damped response in addition to the rejection of disturbances on chosen system outputs. Such options make multi-objective synthesis a suitable choice in practical applications. In [
18], a mixed
output feedback control structure using the pole-placement technique was proposed for multi-area load frequency control, but transmission delays and parameter uncertainties are not considered in the model of the system.
Furthermore, in the aforementioned works [
16,
17,
18], typically, a linear model is considered to express the dynamics of the power systems. However, there are some nonlinear characteristics like valve position limits in the power systems which it is necessary to consider in the modeling procedure. A control technique based on the TS fuzzy-model is a very popular method for controlling complex systems with nonlinearity. In [
19], a robust controller was developed for the LFC of nonlinear power systems with uncertainty using TS fuzzy modeling. However, the transmission delay was not considered in the design procedure. Moreover, a high gain controller was obtained in [
19] which is not reasonable in the implementation phase.
In recent LFC studies, the LFC design of photovoltaic and thermal generators connected by AC tie-line is considered as an early attempt to develop frequency stabilization techniques using I, ID, IDD, PI, and PID determined through the JAYA optimization procedure [
20]. In [
21], in order to fit tie power exchange and frequency deviation and to the desired values after an unexpected load disturbance in an interconnected system, a collaborative scheme using linear quadratic regulator design and hybrid bacteria foraging-oriented PSO is presented to develop an automatic generation control for power delivery systems by having the power generations from hydro turbines in interconnected control areas. A new control method relying on the FO Type-2 Fuzzy logic system suggested in [
22] through PSO to solve the frequency control problem of renewable interconnected power systems in order to restore the power systems to their starting position when a load change occurs. The authors of [
23] present a control framework for the LFC of an interconnected hydro–hydro system by a combination of fuzzy logic and a PID controller that is efficiently optimized by PSO. In [
24], an active fault-tolerant control technique without parameters of the system is suggested for LFC system design. First, to stable any feasible working scenario, a set of controllers is designed. Then, in order to choose the controller that best fits the system, a zero trial-and-error selection procedure, independent of previous system parameters, is developed. In addition, an expanding technique with no previous faulty information is suggested to improve the fault-tolerant capability in the situation of unmodeled faulty scenarios. In [
25], it is addressed how to create an asynchronous FD observer for 2-D MJSs defined by a Roesser model. The FD observer, generally, does not operate synchronously with the system; rather, the observer′s mode changes with the system′s mode in accordance with certain conditional transitional probabilities. For uncovering this challenging issue, a hidden Markov model is used. The FD problem is then solved multi-objectively by integrating the
attenuation index and H increscent index. Furthermore, based on the LMI technique, enough criteria have been established to ensure the asynchronous FD′s occurrence, and to obtain the best performance indices, an asynchronous FD method is simultaneously produced.
Given the above discussion, there still seems to be a deficiency in LFC of multi-area interconnected power systems by taking into account all design limitations including nonlinearities in the system model, functional limitations of all system components, communication time-delays, and uncertainty in system model parameters. On the other hand, it is very important to meet all the control requirements, including the design of a robust controller with practical application to maintaining the system performance with changes in the load demand. To achieve this goal, in addition to the ability to reject the disturbance effect, the designed controller should have an appropriate control gain. In addition to this, achieving a time response with a suitable transient specification is very crucial. The proposed method could be used for thermal, wind, and hydroelectric power plants.
The main novel contributions of this paper are as follows:
Considering all operational limitations of the investigated power system (transmission time delay, nonlinearity of governor, and load changes) in process of designing an LFC system;
Considering all robust performances (presence of model parametric uncertainties and external disturbances);
The rest of the paper is organized as follows. In
Section 2, mathematical models for developing an LFC system are presented. The TS fuzzy model of a multi-area power system considering the valve position limits on the governor is developed in
Section 3. The robust delayed feedback controller design procedure and PDC scheme are proposed in
Section 4. The simulation results are given in
Section 5. Finally, the paper is concluded with some conclusions in
Section 6.
2. LFC Model Description
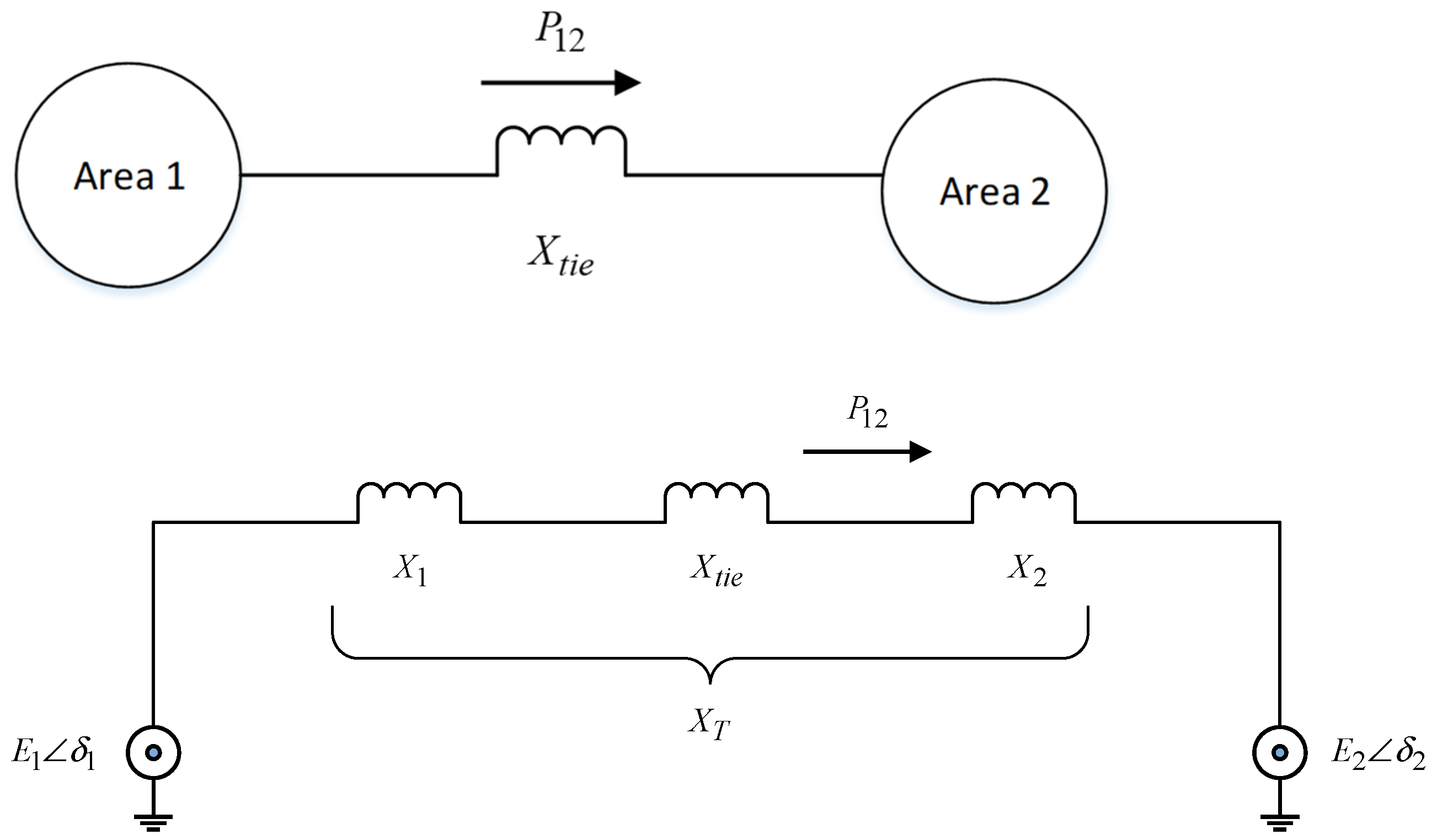
A simple representation of a two-area system and its electrical equivalent circuit is illustrated in
Figure 1.
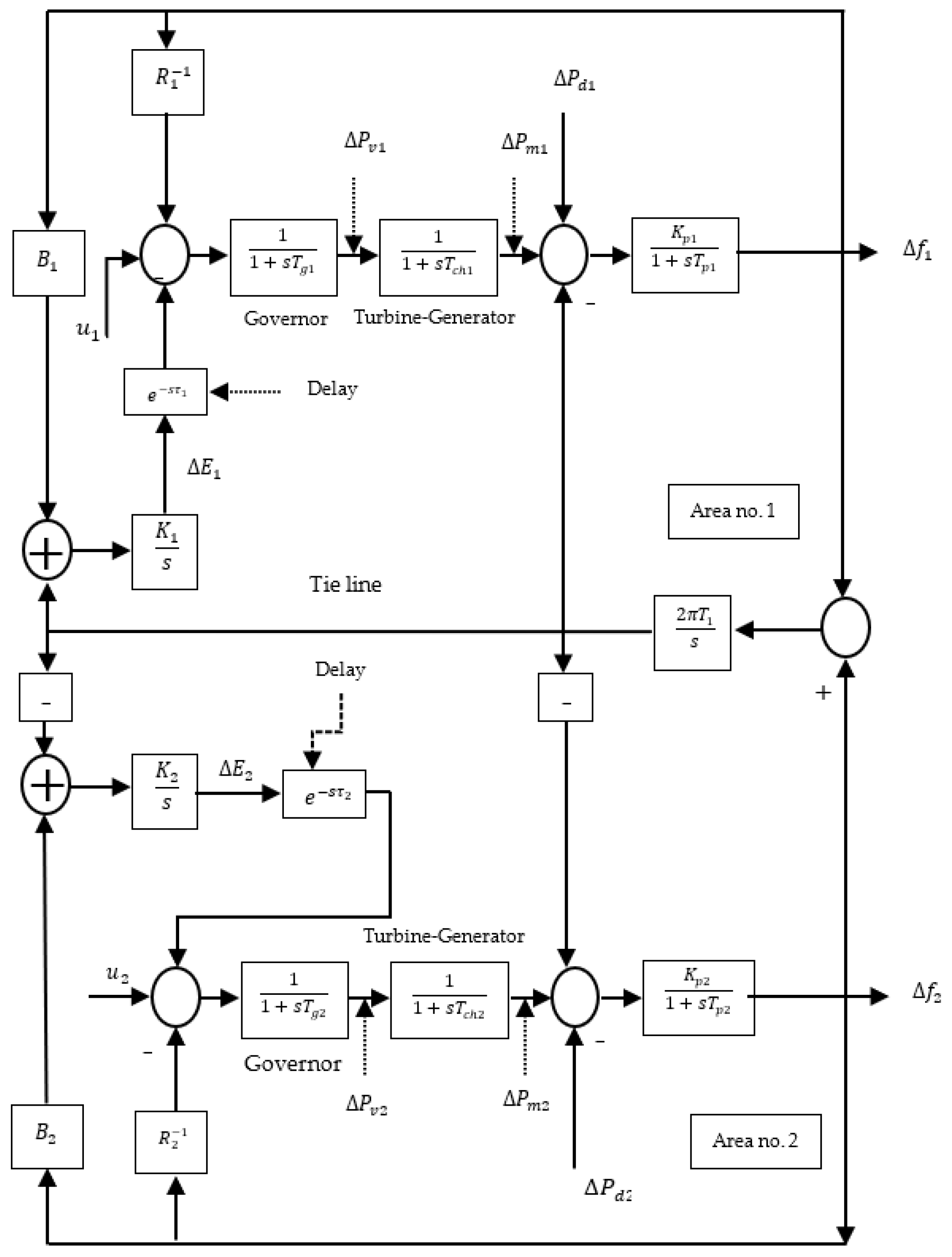
The overall block diagram of two-area interconnected power systems with communication delays is depicted in
Figure 2. In an LFC system, there are always delays in the communication networks among the controller unit and operational units; especially on the measured tie-line power flow and frequency. These time delays have an effect on the system operation and even cause instability in the LFC system. Hence, it is pivotal to consider this issue during the designing process of an LFC system.
It can be seen that there is a local PI controller in both control areas as an integral part of the model. The differential equations of the delayed multi-area power system can be formulated as [
16,
17]:
where
and
τi is the transmission delay of
ith area that arises in two situations; first, during transmission of the telemetered signals to the local control center by RTUs, and second, when ACE signals transmit from the control unit to the generator unit [
16].
In the situation of a large change in load disturbance
, the linear model (1) cannot be a good approximation of a practical system. This inaccuracy is resulted from the governor valve position limitations due to its mechanical structure [
26,
27]. This means that when a large
occurs, a large change in speed changer position
is required to regulate the frequency deviation
; however, the governor output
will not change beyond a specific level. This being the case, it is essential to design an LFC system to guarantee the power system stability with this limitation. A piston-like steam valve system is illustrated in
Figure 3 used in this paper to model the valve position limitations. A nonlinear function
is defined as follows to represent the governor valve position limit.
Now, by considering valve position limitations, the nonlinear differential equations of the system are rewritten as follows:
3. TS Fuzzy Modeling
In this section, the design stage begins with describing the nonlinear systems using the TS fuzzy model. This model is represented by the fuzzy IF-THEN rules that comprise local linear input–output relations of the nonlinear system in their consequent parts.
To obtain the system’s TS fuzzy model, membership functions are defined as follows:
where
Next, the TS fuzzy system is defined by fuzzy IF-THEN rules. The ith rule of the TS fuzzy model is given as follows:
Model Rule i:
If is and is
Then
where
is the premise variable vector,
is the state vector,
is the control input vector,
is the disturbance input vector, and
is the output vector and
,
are the matrices that present the delayed dynamics of the system.
Furthermore,
,
,
,
,
, and
are known constant matrices as follows:
where
Furthermore,
,
, and
denote the parametric uncertainties. Without losing generality, these uncertainties of parameters are typically considered to fulfill.
where
,
,
, and
are the known constant matrices with proper dimensions, and the nonlinear uncertain matrix
fulfills.
Thus, the overall uncertain delayed T-S fuzzy system is represented as:
where
is the normalized membership function corresponds to
the rule and is defined as follows:
where
.
4. Proposed Robust Control Based on the PDC Scheme
control is one of the most efficient controllers to attenuate the effects of external disturbances and parametric uncertainties. However, these control structures typically cause large gains and greatly magnify noises, degrading efficiency. In this situation, the combination of and controllers can be effective to keep the control signal within practical bounds, because it considers a trade-off between the robustness and the control cost. Moreover, the controller improves closed-loop system time responses including settling time, overshoot, and a maximum frequency of response.
By assuming the following delayed LFC system with parametric uncertainties:
A delay-dependent state feedback controller is proposed as follows:
The resulting LFC system could be as follows:
The relationship between the interference and output can be represented as .
4.1. Controller Design
Let
as closed-loop transfer function from the disturbance vector
to the output vector
. The aim is to develop the state feedback controller (12) such that satisfy the following inequality:
where
is
performance index showing the measured disturbance rejection of the robust controller. It is clear that a smaller value of
indicates better robustness performance.
Theorem 1 [17]. The delayed uncertain close-loop LFC system (13) with the control law (12) meets the performance index (14), if there exist a scalar , matrices , , , , and, , , , such that the following LMI holds.
where
The optimized attenuation level
could be determined by the following subject and (14):
4.2. Controller Design
Consider the time delay (11) in an uncertain LFC system. If a positive scalar
and a control rule
exist for all permissible uncertainties, the closed-loop system will be stable, and the cost function’s closed-loop value is defined as follows:
By satisfying
, then
is guaranteed cost and
is guaranteed cost control law of the system. Where
R and
Q are positive-definite symmetric matrices [
28] that determine the weight of state variables and control variables in the cost function (17), respectively. Since the importance of state and input variables is the same in this research, both matrices are considered identity matrices.
Theorem 2 [28]. Assume the delayed LFC system with parametric uncertainties (11) with cost function (17). If the optimization problem (18–21) has a solution, then the control ruleis the optimal state feedback guaranteed cost control rule that guarantees the optimization of the guaranteed cost (17) for the time-delay system with parametric uncertainties.
Subject to
where
and tr(.) denotes the trace of the matrix(.).
4.3. Multi-Objective Controller Design
A multi-objective
controller is developed by a combination of the constrained optimization problems corresponding with
and
controllers in this subsection. Thus, the constrained optimization problem is as follows in addition to subjects in (15), (19), (20) and (21):
Then, the delayed state feedback control law is designed by (12), where the feedback gains could be obtained using and , respectively.
4.4. Parallel Distributed Compensation Scheme
The fuzzy logic theory can be employed to divide the process of modeling and control design into a set of simpler local tasks by using linguistic and qualitative information about a complex nonlinear system. Besides that, it offers a methodology for combining these local tasks to produce the entire control and model structure. From the other perspective, improvements in the theory of linear systems have developed a variety of effective design tools available. As a result, the analysis and controller synthesis of the nonlinear system could be performed using the effective linear system theory based on the linear T-S fuzzy model. The benefits of both linear system and fuzzy logic theories are combined in the PDC scheme. The fuzzy PDC provides an approach for designing a control structure by using a TS fuzzy model. In this approach, every control law is given based on the related law of a TS fuzzy model.
The ith law for the PDC scheme is given as:
The overall fuzzy delay-dependent control signal could be rewritten as follows:
Then, the open-loop TS system (9) will be converted into a closed-loop system by adding a PDC controller (24).
5. Simulation Results
In this section, the effectiveness and robustness of the proposed approach are demonstrated through simulation results of a delayed uncertain power system with two areas by consideration of valve position limitations. The system is shown in
Figure 2 which in area 1, there are two generators and area 2 has four generators.
Table 1 presents the nominal values of system parameters [
16,
17,
29].
Moreover, in both control regions, time delays are adjusted as and
All simulations are performed on MATLAB software running on a computer with a 2.67 GHz Intel Core i5 CPU, 4GB RAM, and a 64-bit operation system. The computation complexity depends on the number of decision variables in the LMIs and the maximum order of LMI which are strongly linked to the delayed states [
30].
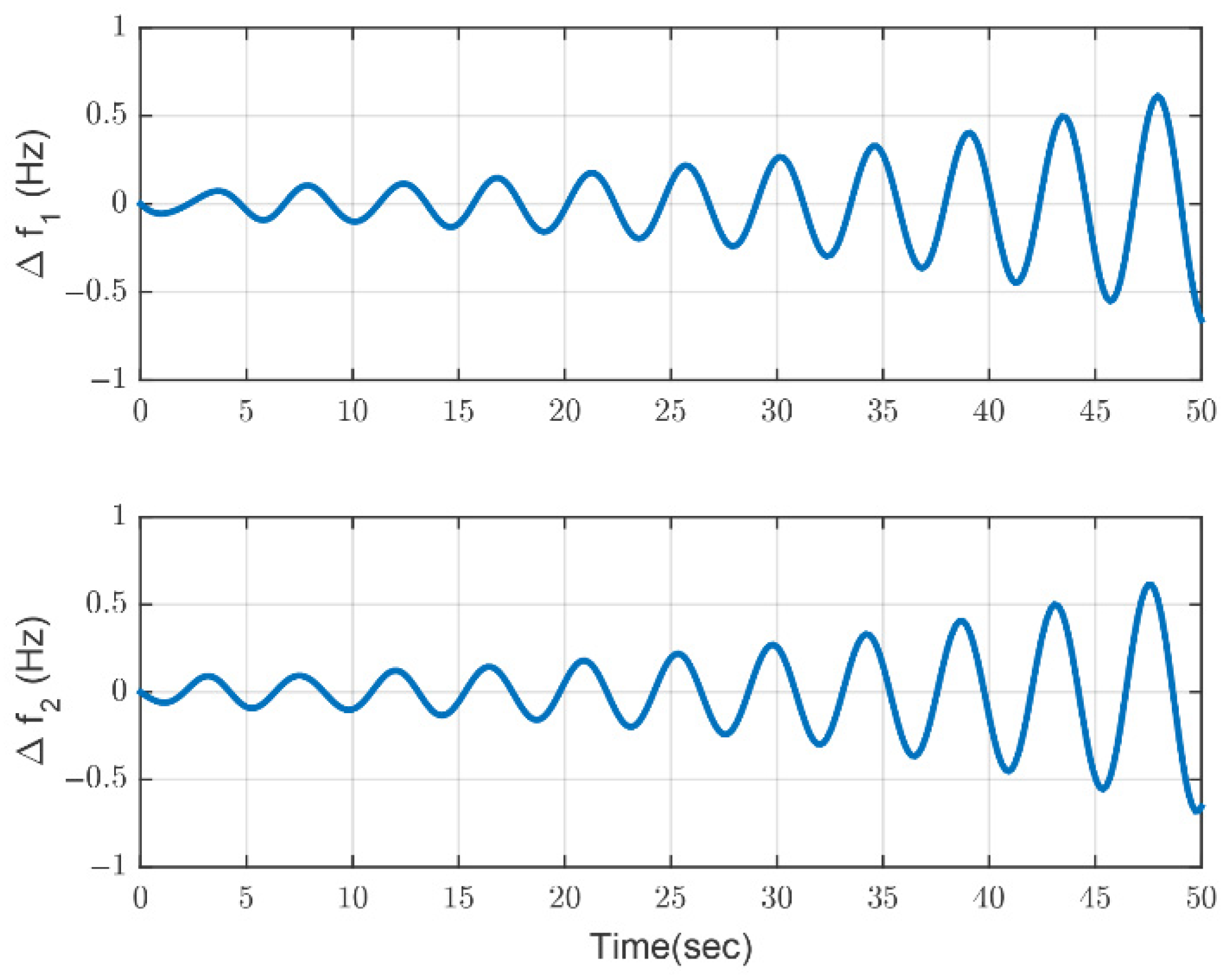
The results of an event as a unit step change in the load demand with no extra control input are illustrated in
Figure 4. The results show that the nonlinear uncertain delayed LFC system is unstable using predetermined local PI controllers
.
The parameters and are considered as 0.12 p.u. and −0.03 p.u., respectively. Furthermore, design parameters and are chosen as 0.47.
After solving the constrained optimization problem (22), the following feedback gains are obtained:
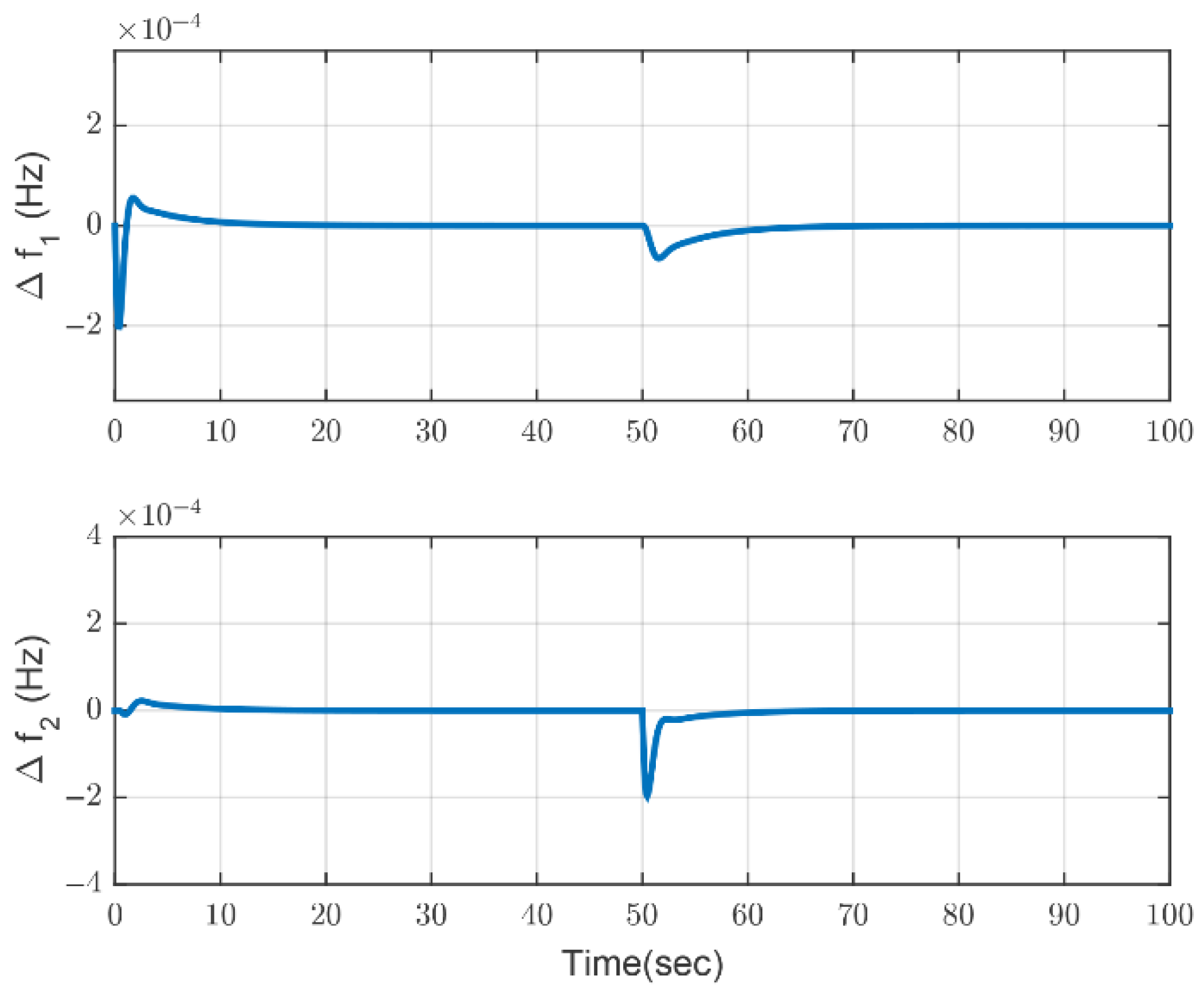
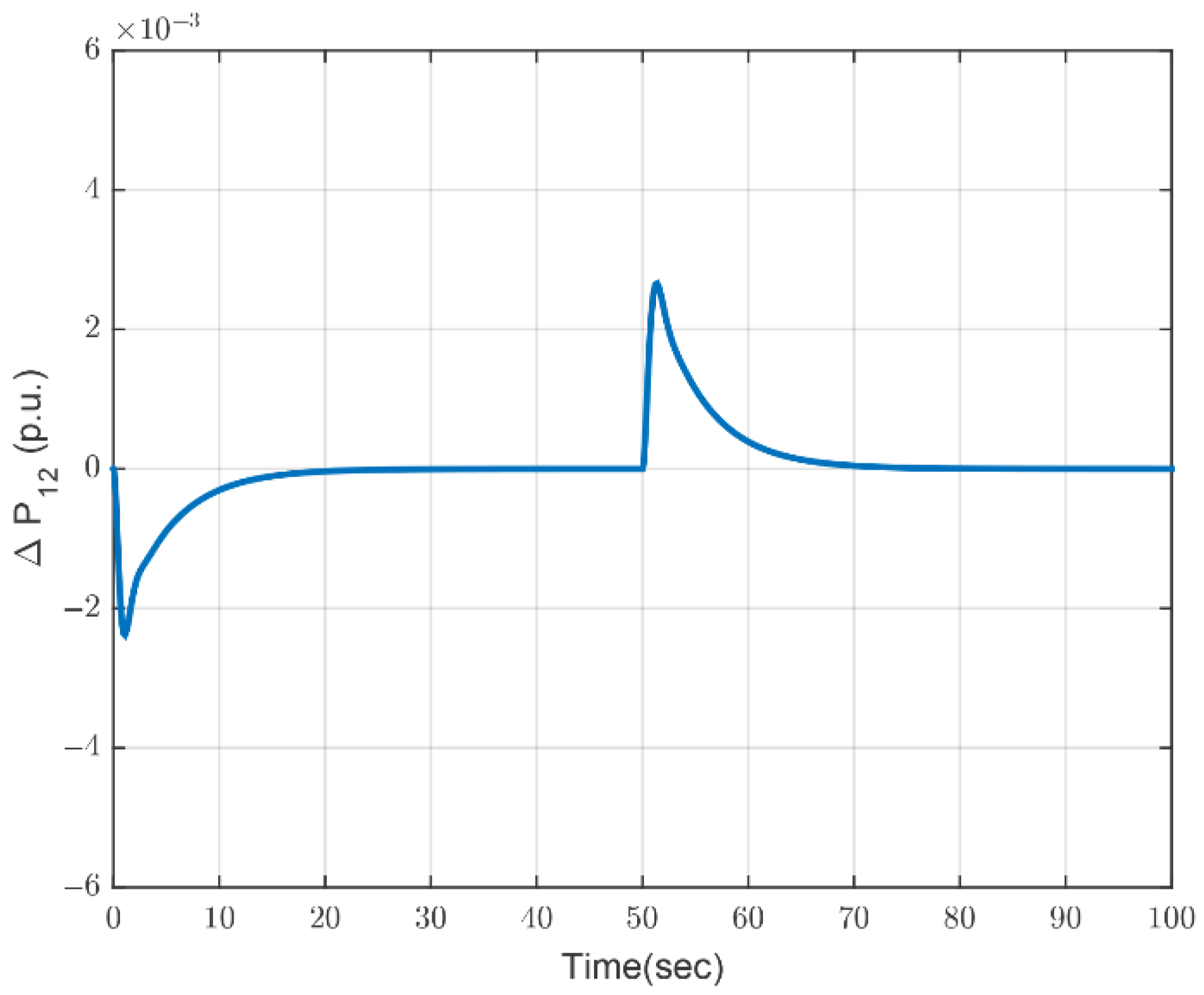
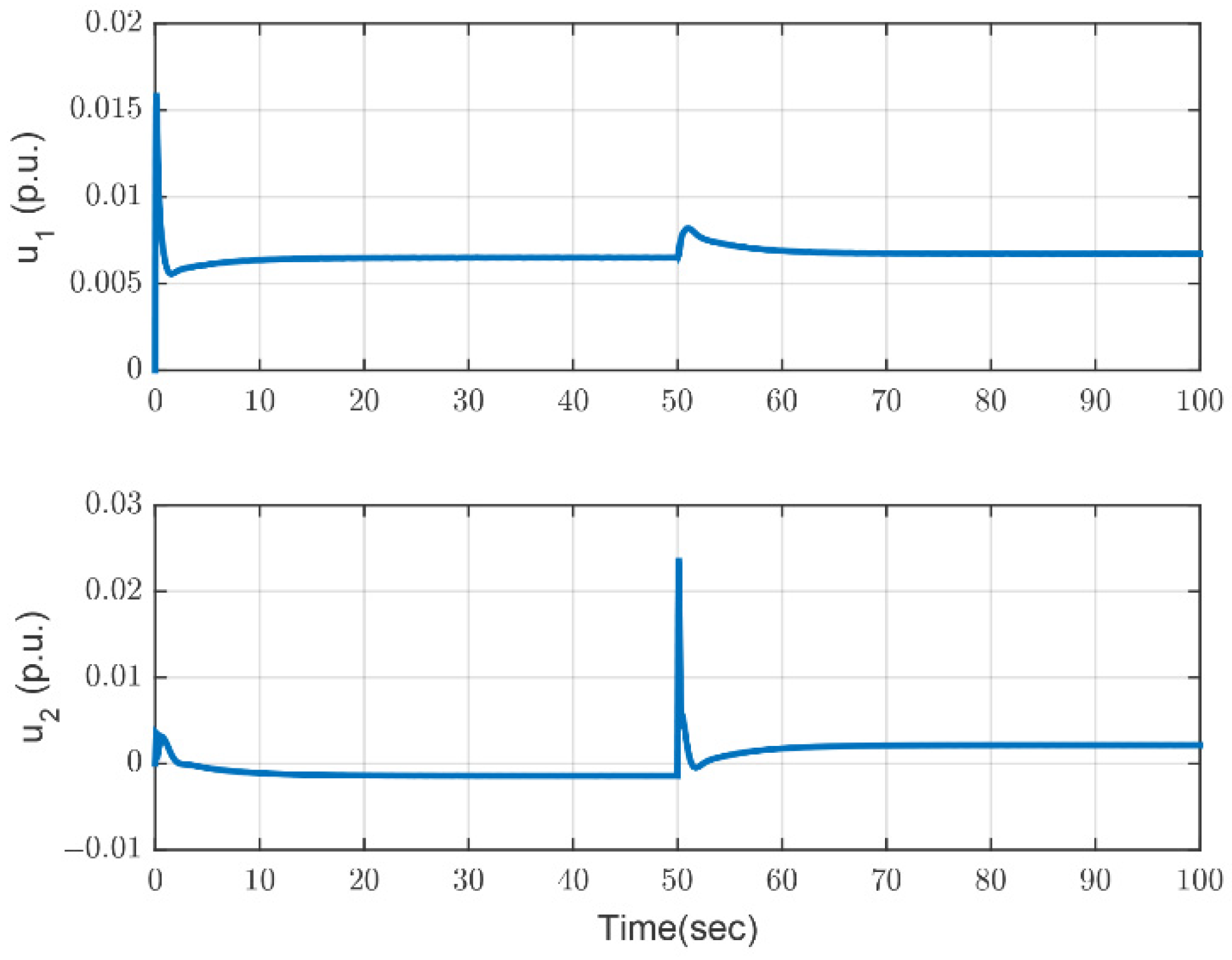
The main objective of the presented approach is to stabilize the outputs of the system (Δf1, Δf2) in presence of delays, parameter uncertainties, load disturbances, and valve position limits. Two kinds of load disturbances are assumed in this simulation, namely, unit and random step changes in load demands in areas 1 and 2. For the unit step change, load demand change assumes that the load demand change is 0.01 p.u. step changes in load demand of area 1 at the initial time and 0.01 p.u. step changes in load demand of area 2 at t = 50 s.
Figure 5,
Figure 6 and
Figure 7 show the fluctuations of frequency, mechanical power output, and tie-line power under the unit step load disturbances for the closed-loop LFC system with a fuzzy robust multi-objective H
2/H
∞ delayed feedback controller. It can be seen that the deviations in frequency, mechanical power output, and tie-line power reach desired points with suitable transient responses. Moreover, the corresponding control inputs are shown in
Figure 8.
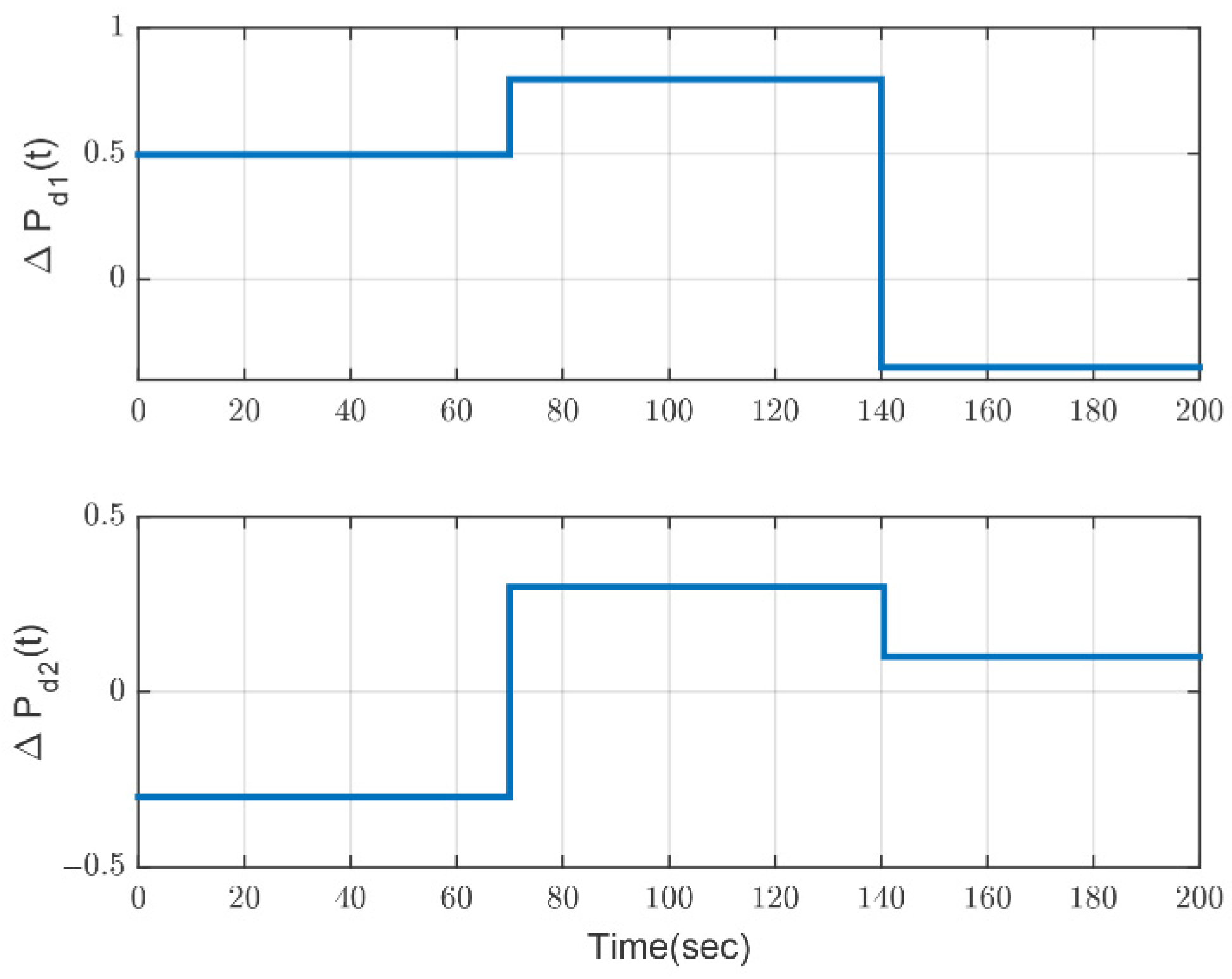
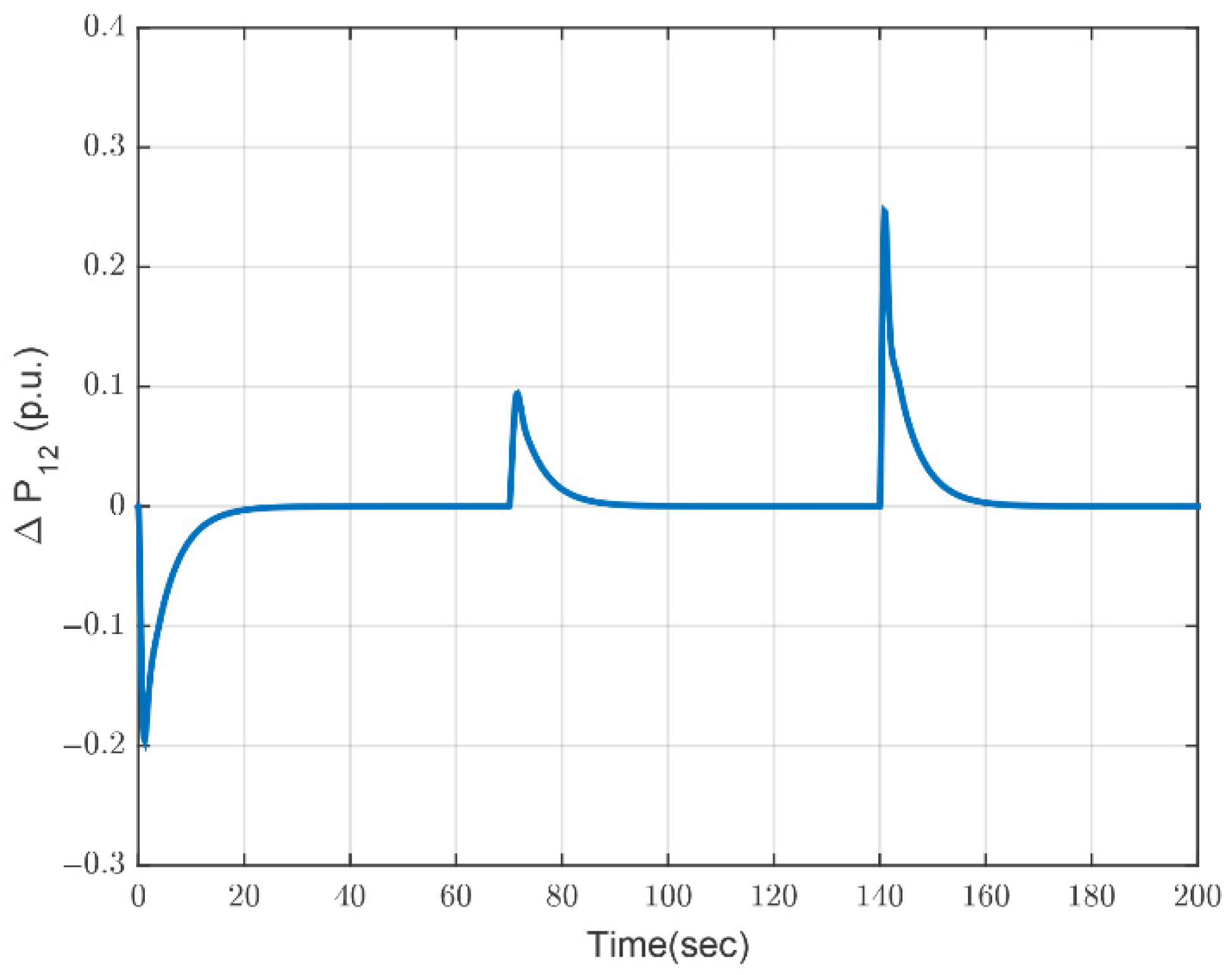
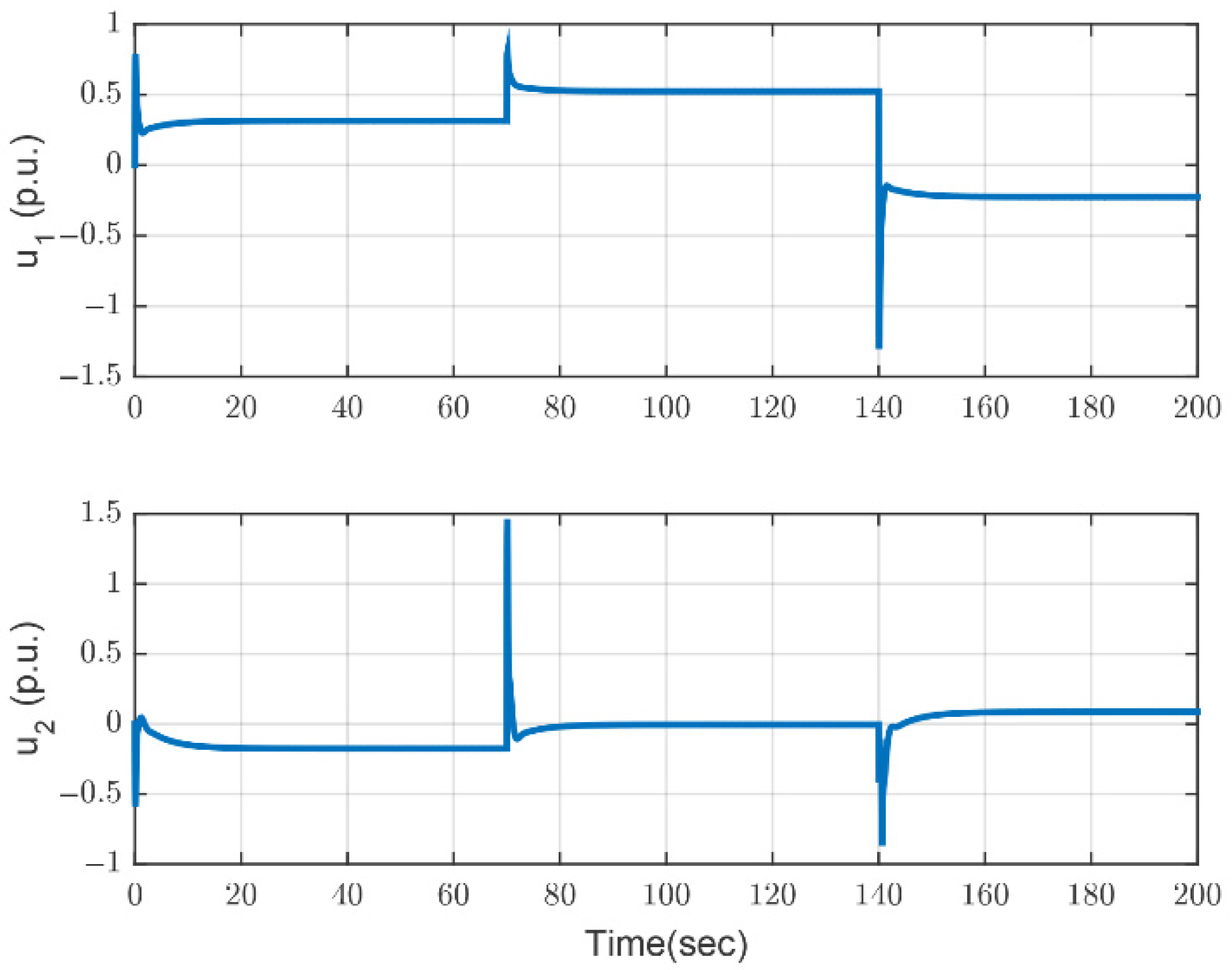
In another scenario, the random load demand change illustrated in
Figure 9 is entered into both areas. The frequency, mechanical power, and tie-line power deviations of the closed-loop LFC system using the presented control structure step load disturbance randomly are shown in
Figure 10,
Figure 11 and
Figure 12, respectively. Moreover, the control signals are shown in
Figure 13. The results prove that the presented scheme could efficiently fulfill performance criteria, such as fast transient responses, load disturbance rejection, and robustness by considering all practical limitations.
Moreover, transient specifications of the closed-loop responses with the proposed method are compared with closed-loop responses obtained from other references. The comparison of numerical values of time domain specification for unit step load and random load demand changes are given in
Table 2 and
Table 3, respectively. Comparison results prove that the responses obtained from the proposed method have superiority compared to closed-loop responses employing other references.
Furthermore, in order to show the effectivity of the suggested scheme, this approach is compared with [
16,
17,
18,
19] in terms of considering load disturbance, parameter uncertainties, transmission delay, the nonlinearity of valve position limits, improving transient responses, and the ability of practical applications. This comparison is presented in
Table 4. The proposed method in this paper takes into account all design specifications which should be considered in real-world applications. Moreover, for emphasizing the efficiency of the proposed control system, a comparison with the existed controllers in terms of the norm values of the gain matrices is done and given in
Table 5. It can be seen from obtained results that the proposed controller is far more realizable than other existing controllers.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}