
Robust Multi-Objective H2/H∞ Load Frequency Control of Multi-Area Interconnected Power Systems Using TS Fuzzy Modeling by Considering Delay and Uncertainty



Abstract
:
1. Introduction
- Considering all operational limitations of the investigated power system (transmission time delay, nonlinearity of governor, and load changes) in process of designing an LFC system;
- Considering all robust performances (presence of model parametric uncertainties and external disturbances);
- Designing a robust multi-objective controller ( performance for rejecting the disturbance and uncertainty effects and performance for improving the transient responses and achieving a reasonable and implementable controller with appropriate gains);
- Utilizing TS fuzzy modelling for linearization of the nonlinear system with proper accuracy.
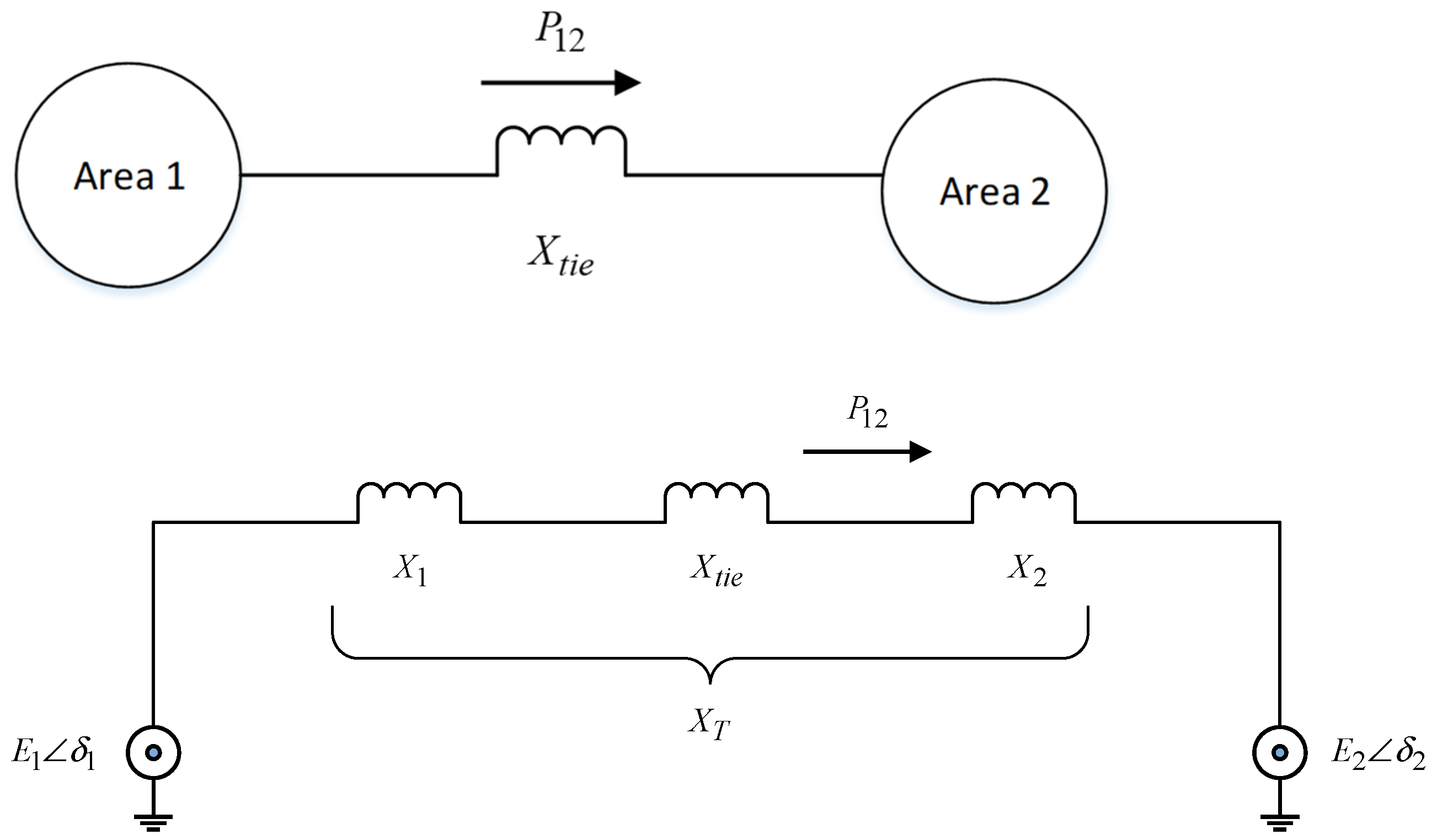
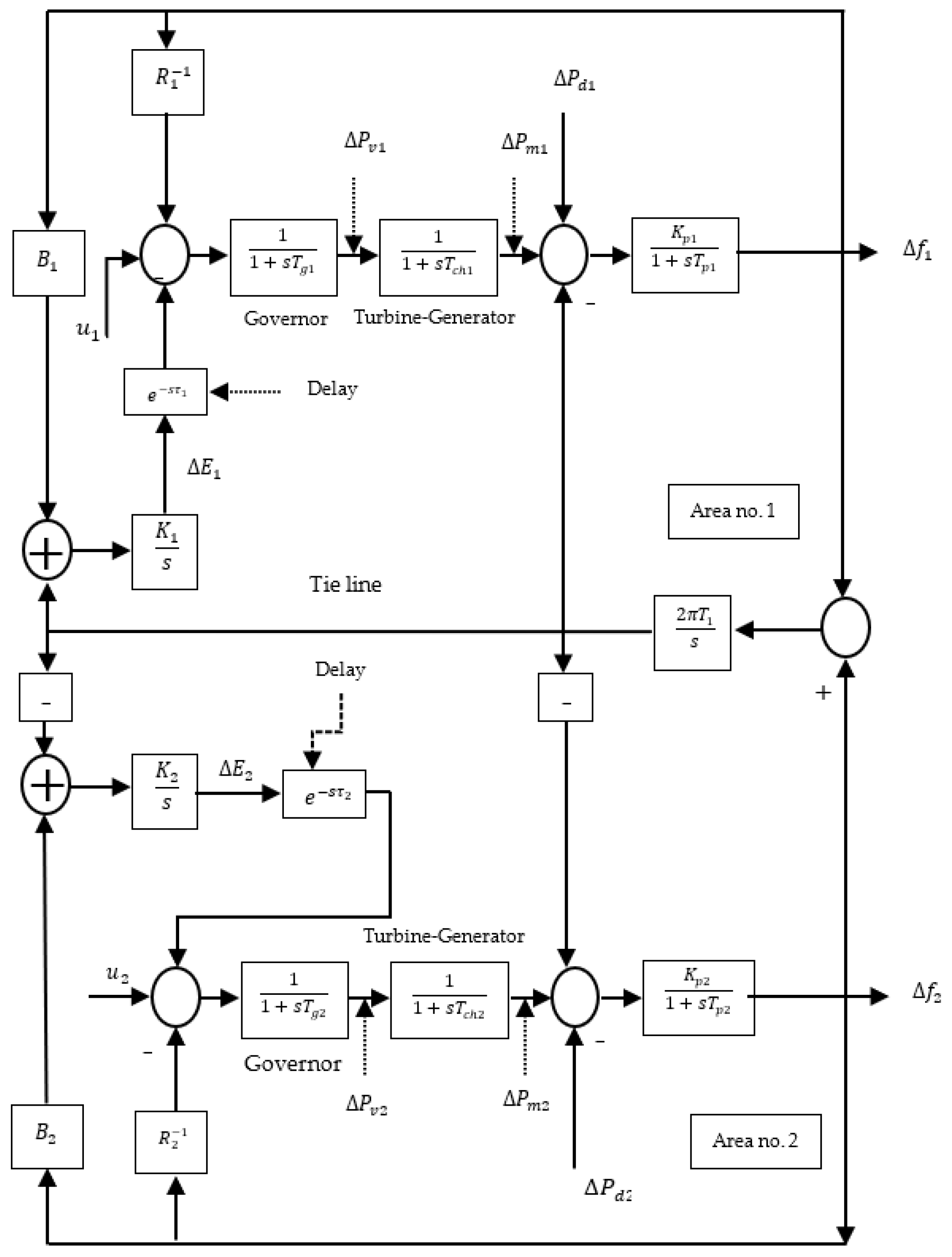
2. LFC Model Description
3. TS Fuzzy Modeling
4. Proposed Robust Control Based on the PDC Scheme
4.1. Controller Design
4.2. Controller Design
4.3. Multi-Objective Controller Design
4.4. Parallel Distributed Compensation Scheme
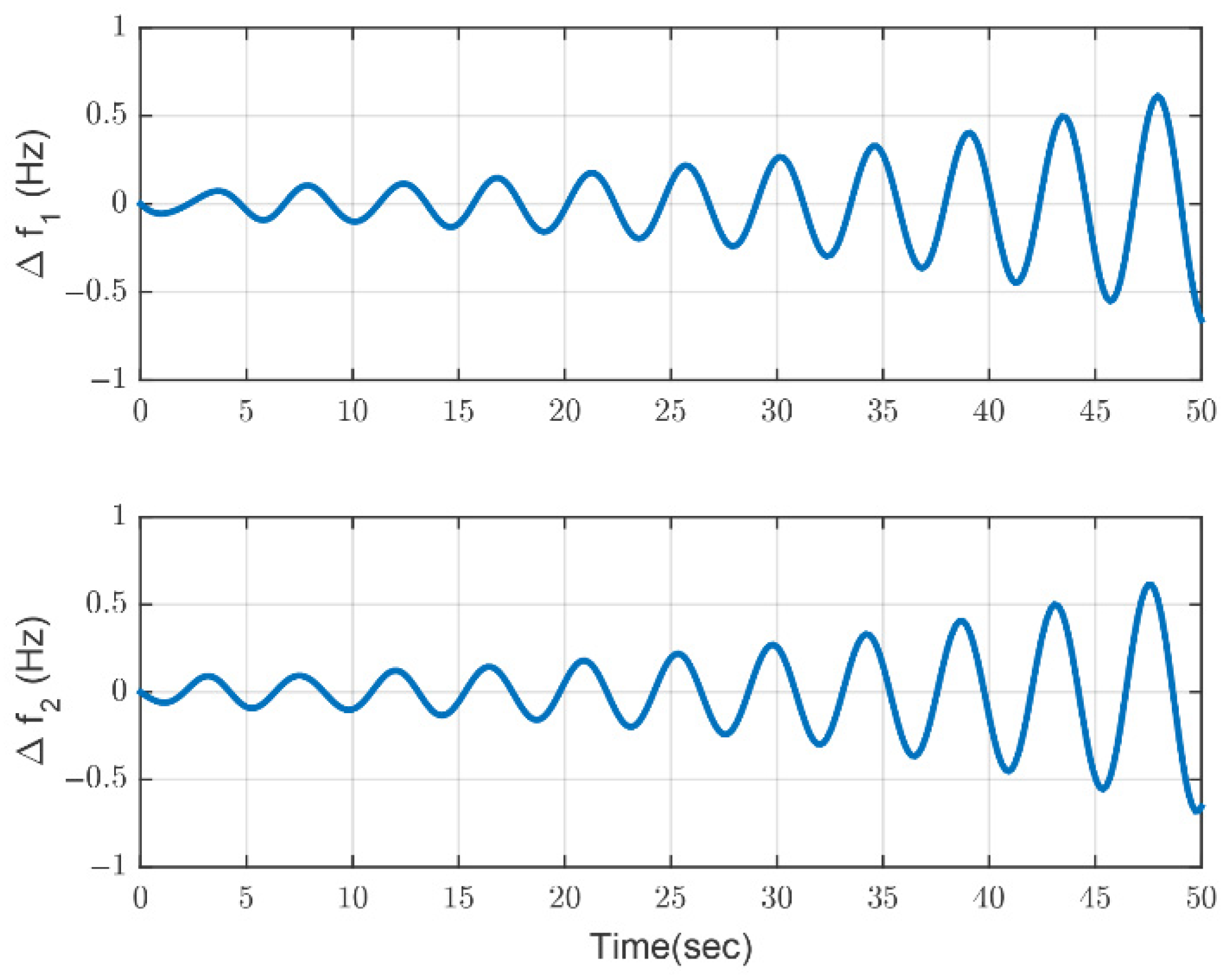
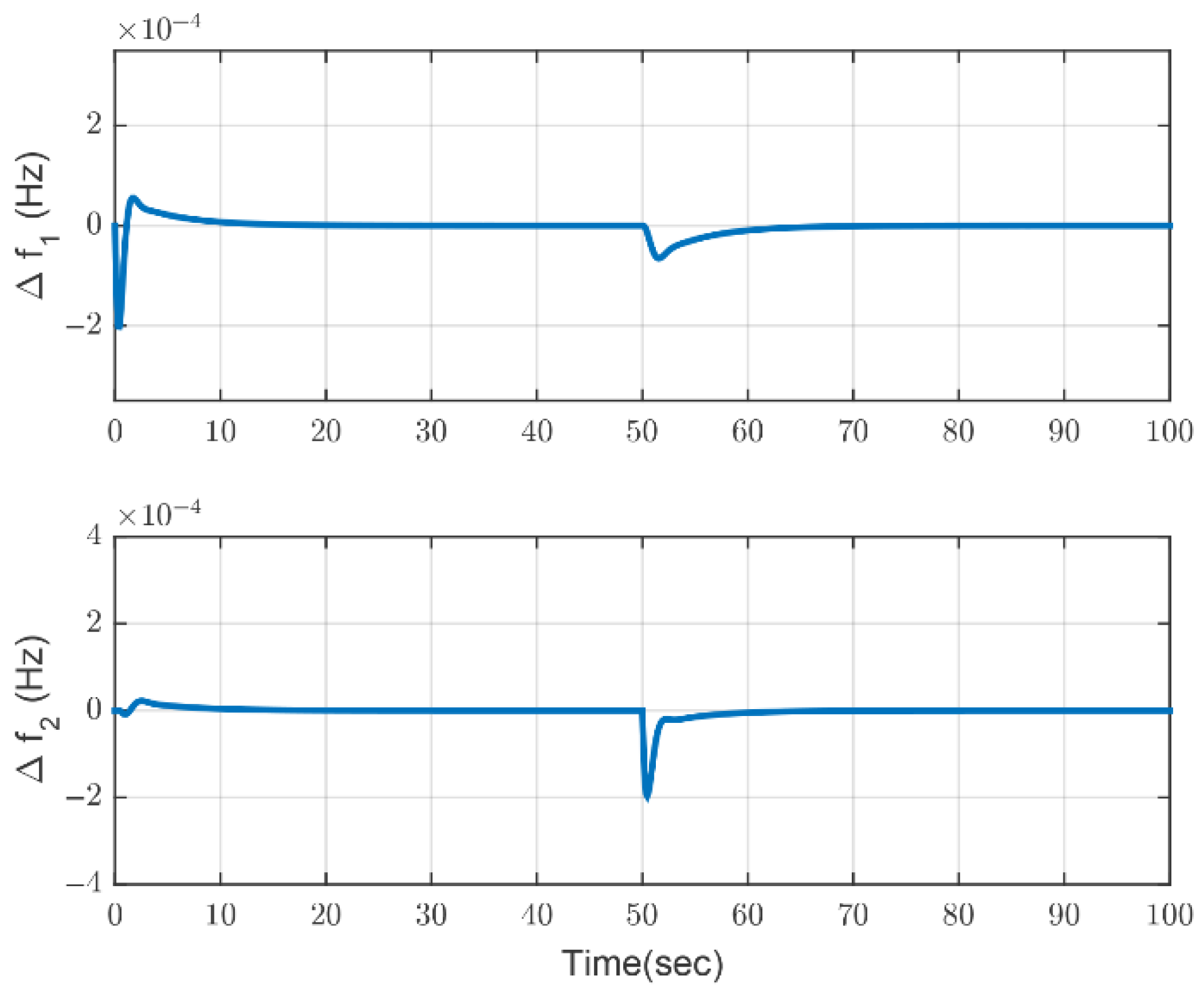
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| LFC | Load Frequency Control |
| PI | Proportional Integral |
| PID | Proportional Integral Derivative |
| LMI | Linear Matrix Inequalities |
| V2G | Vehicle to Grid |
| TS | Takagi–Sugeno |
| FO | Fractional Order |
| PSO | Particle Swarm Optimization |
| FD | Fault Detection |
| MJS | Markov Jump System |
| PDC | Parallel Distributed Compensation |
| I | Integral |
| ID | Integral Derivative |
| IDD | Integral Double Derivative |
| ΔPvi,min | Minimum of power limitation |
| ΔPvi,max | Maximum of power limitation |
| ΔEi | ACE signals |
| Δfi | Frequency deviations |
| ΔPvi | Governor valve position |
| ΔPmi | Mechanical power output of the alternator |
| Bi | Proportional gains of local PI controllers |
| ΔP12 | Tie-line power flow from area 1 to area 2 |
| Ki | Integral gains of local PI controllers |
| Mi | Moment of inertia of the generators |
| ΔPdi | Load disturbances |
| Ti | Stiffness coefficients |
| Ri | Speed droops |
| Tpi | Power system time constants |
| Di | Generator damping coefficients |
| Tgi | Governor time constants |
| Tchi | Turbine time constants |
| ΔPci | Change in speed changer position |
| τ | Communication delay |
References
- Kundur, P. Power System Stability and Control; McGraw-Hill Books: New York, NY, USA, 1994; p. 581. [Google Scholar]
- Sathya, M.R.; Ansari, M.M.T. Load frequency control using Bat inspired algorithm based dual mode gain scheduling of PI controllers for interconnected power system. Int. J. Electr. Power Energy Syst. 2015, 64, 365–374. [Google Scholar] [CrossRef]
- Bevrani, H.; Hiyama, T. Robust decentralised PI based LFC design for time delay power systems. Energy Convers. Manag. 2008, 49, 193–204. [Google Scholar] [CrossRef]
- Bevrani, H.; Mitani, Y.; Tsuji, K. Robust decentralised load-frequency control using an iterative linear matrix inequalities algorithm. IEE Proc. Gener. Transm. Distrib. 2004, 151, 347–354. [Google Scholar] [CrossRef] [Green Version]
- Sharma, D.; Yadav, N.K. LFOPI controller: A fractional order PI controller based load frequency control in two area multi-source interconnected power system. Data Technol. Appl. 2020, 54, 323–342. [Google Scholar] [CrossRef]
- Juang, C.F.; Lu, C.F. Load-frequency control by hybrid evolutionary fuzzy PI controller. IEE Proc. Gener. Transm. Distrib. 2006, 153, 196–204. [Google Scholar] [CrossRef]
- Sudha, K.R.; Santhi, R.V. Robust decentralized load frequency control of interconnected power system with generation rate constraint using type-2 fuzzy approach. Int. J. Electr. Power Energy Syst. 2011, 33, 699–707. [Google Scholar] [CrossRef]
- Shayeghi, H.; Shayanfar, H.; Malik, O. Robust decentralized neural networks based LFC in a deregulated power system. Electr. Power Syst. Res. 2007, 77, 241–251. [Google Scholar] [CrossRef]
- Dahab, Y.A.; Abubakr, H.; Mohamed, T.H. Adaptive load frequency control of power systems using electro-search optimization supported by the balloon effect. IEEE Access 2020, 8, 7408–7422. [Google Scholar] [CrossRef]
- Yang, M.; Wenlin, L.; Yuanwei, J. Decentralized load frequency variable structure control of multi-area interconnected power system. In Proceedings of the Chinese Control and Decision Conference (CCDC), Mianyang, China, 23–25 May 2011; IEEE: Piscataway, NJ, USA, 2011. [Google Scholar]
- Dong, L.; Zhang, Y.; Gao, Z. A robust decentralized load frequency controller for interconnected power systems. ISA Trans. 2012, 51, 410–419. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Delassi, A.; Arif, S.; Mokrani, L. Load frequency control problem in interconnected power systems using robust fractional PIλD controller. Ain Shams Eng. J. 2018, 9, 77–88. [Google Scholar] [CrossRef] [Green Version]
- Vachirasricirikul, S.; Ngamroo, I. Robust LFC in a smart grid with wind power penetration by coordinated V2G control and frequency controller. IEEE Trans. Smart Grid 2014, 5, 371–380. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, Y.; Lee, K.Y. Robust distributed MPC for load frequency control of uncertain power systems. Control. Eng. Pract. 2016, 56, 136–147. [Google Scholar] [CrossRef]
- Yu, X.; Tomsovic, K. Application of linear matrix inequalities for load frequency control with communication delay. IEEE Trans. Power Syst. 2004, 19, 1508–1515. [Google Scholar] [CrossRef]
- Dey, R.; Ghosh, S.; Ray, G.; Rakshit, A. H∞ load frequency control of interconnected power systems with communication delays. Int. J. Electr. Power Energy Syst. 2012, 42, 672–684. [Google Scholar] [CrossRef]
- Sun, Y.; Li, N.; Zhao, X.; Wei, Z.; Sun, G.; Huang, C. Robust H∞ load frequency control of delayed multi-area power system with stochastic disturbances. Neurocomputing 2016, 193, 58–67. [Google Scholar] [CrossRef]
- Bensenouci, A.; Ghany, A.A. Mixed H∞/H2 with pole-placement design of robust LMI-based output feedback controllers for multi-area load frequency control. In Proceedings of the International Conference on Computer as a Tool, Warsaw, Poland, 9–12 September 2007; IEEE: Piscataway, NJ, USA, 2007. [Google Scholar]
- Lee, H.J.; Park, J.B.; Joo, Y.H. Robust load-frequency control for uncertain nonlinear power systems: A fuzzy logic approach. Inf. Sci. 2006, 176, 3520–3537. [Google Scholar] [CrossRef]
- Sharma, G.; Krishnan, N.; Arya, Y.; Panwar, A. Impact of ultracapacitor and redox flow battery with JAYA optimization for frequency stabilization in linked photovoltaic-thermal system. Int. Trans. Electr. Energy Syst. 2021, 31, e12883. [Google Scholar] [CrossRef]
- Panwar, A.; Agarwal, V.; Sharma, G.; Sharma, S. Design of a novel AGC action for a linked hydro governing system. Electr. Power Compon. Syst. 2021, 49, 1201–1211. [Google Scholar] [CrossRef]
- Kader, M.O.A.; Akindeji, K.T.; Sharma, G. A Novel Solution for Solving the Frequency Regulation Problem of Renewable Interlinked Power System Using Fusion of AI. Energies 2022, 15, 3376. [Google Scholar] [CrossRef]
- Joshi, M.; Sharma, G.; Bokoro, P.N.; Krishnan, N. A Fuzzy-PSO-PID with UPFC-RFB Solution for an LFC of an Interlinked Hydro Power System. Energies 2022, 15, 4847. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, T.; Tang, Z. Active fault-tolerant control for load frequency control in multi-area power systems with physical faults and cyber attacks. Int. Trans. Electr. Energy Syst. 2021, 31, e12906. [Google Scholar] [CrossRef]
- Cheng, P.; Wang, H.; Stojanovic, V.; He, S.; Shi, K.; Luan, X.; Liu, F.; Sun, C. Asynchronous fault detection observer for 2-D Markov jump systems. In IEEE Transactions on Cybernetics; IEEE: Piscataway, NJ, USA, 2021. [Google Scholar]
- Moon, Y.H.; Ryu, H.S.; Choi, B.K.; Cho, B.H. Modified PID load-frequency control with the consideration of valve position limits. In Proceedings of the IEEE Power Engineering Society. 1999 Winter Meeting (Cat. No. 99CH36233), New York, NY, USA, 31 January–4 February 1999; IEEE: Piscataway, NJ, USA, 1999; Volume 1, pp. 701–706. [Google Scholar]
- Moon, Y.H.; Ryu, H.S.; Lee, J.G.; Song, K.B.; Shin, M.C. Extended integral control for load frequency control with the consideration of generation-rate constraints. Int. J. Electr. Power Energy Syst. 2002, 24, 263–269. [Google Scholar] [CrossRef]
- Yu, L.; Chu, J. An LMI approach to guaranteed cost control of linear uncertain time-delay systems. Automatica 1999, 35, 1155–1159. [Google Scholar] [CrossRef]
- Ahmadi, A.; Aldeen, M. An LMI approach to the design of robust delay-dependent overlapping load frequency control of uncertain power systems. Int. J. Electr. Power Energy Syst. 2016, 81, 48–63. [Google Scholar] [CrossRef]
- Jin, L.; Zhang, C.K.; He, Y.; Jiang, L.; Wu, M. Delay-dependent stability analysis of multi-area load frequency control with enhanced accuracy and computation efficiency. IEEE Trans. Power Syst. 2019, 34, 3687–3696. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Area | ||||||||
|---|---|---|---|---|---|---|---|---|
| 1 | 0.3 | 0.1 | 0.05 | 10 | 1 | 0.5 | 41 | 3 |
| 2 | 0.17 | 0.4 | 0.05 | 8 | 0.66 | 0.5 | 81.5 | 3 |
| Parameter | Peak Overshoot | Peak Undershoot | Settling Time | Steady-State Error | Method |
|---|---|---|---|---|---|
| - | [16] | ||||
| - | |||||
| - | [17] | ||||
| - | |||||
| - | Proposed method | ||||
| - | |||||
| Parameter | Peak Overshoot | Peak Undershoot | Settling Time | Steady-State Error | Method |
|---|---|---|---|---|---|
| - | [16] | ||||
| - | |||||
| - | [17] | ||||
| - | |||||
| - | Proposed method | ||||
| - | |||||
| [16] | [17] | [18] | [19] | Proposed Scheme | |
|---|---|---|---|---|---|
| Load disturbance | Yes | Yes | Yes | Yes | Yes |
| Parameter uncertainties | No | Yes | No | Yes | Yes |
| Transmission delay | Yes | Yes | No | No | Yes |
| Nonlinearity of valve position limits | No | No | No | Yes | Yes |
| Delay-dependent controller | Yes | Yes | No | No | Yes |
| Reasonable and practical control signals | No | No | Yes | No | Yes |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohseni, N.A.; Bayati, N. Robust Multi-Objective H2/H∞ Load Frequency Control of Multi-Area Interconnected Power Systems Using TS Fuzzy Modeling by Considering Delay and Uncertainty. Energies 2022, 15, 5525. https://doi.org/10.3390/en15155525
Mohseni NA, Bayati N. Robust Multi-Objective H2/H∞ Load Frequency Control of Multi-Area Interconnected Power Systems Using TS Fuzzy Modeling by Considering Delay and Uncertainty. Energies. 2022; 15(15):5525. https://doi.org/10.3390/en15155525
Chicago/Turabian StyleMohseni, Naser Azim, and Navid Bayati. 2022. "Robust Multi-Objective H2/H∞ Load Frequency Control of Multi-Area Interconnected Power Systems Using TS Fuzzy Modeling by Considering Delay and Uncertainty" Energies 15, no. 15: 5525. https://doi.org/10.3390/en15155525
APA StyleMohseni, N. A., & Bayati, N. (2022). Robust Multi-Objective H2/H∞ Load Frequency Control of Multi-Area Interconnected Power Systems Using TS Fuzzy Modeling by Considering Delay and Uncertainty. Energies, 15(15), 5525. https://doi.org/10.3390/en15155525