
Modeling and Simulation of Extended-Range Electric Vehicle with Control Strategy to Assess Fuel Consumption and CO2 Emission for the Expected Driving Range



Abstract
:1. Introduction
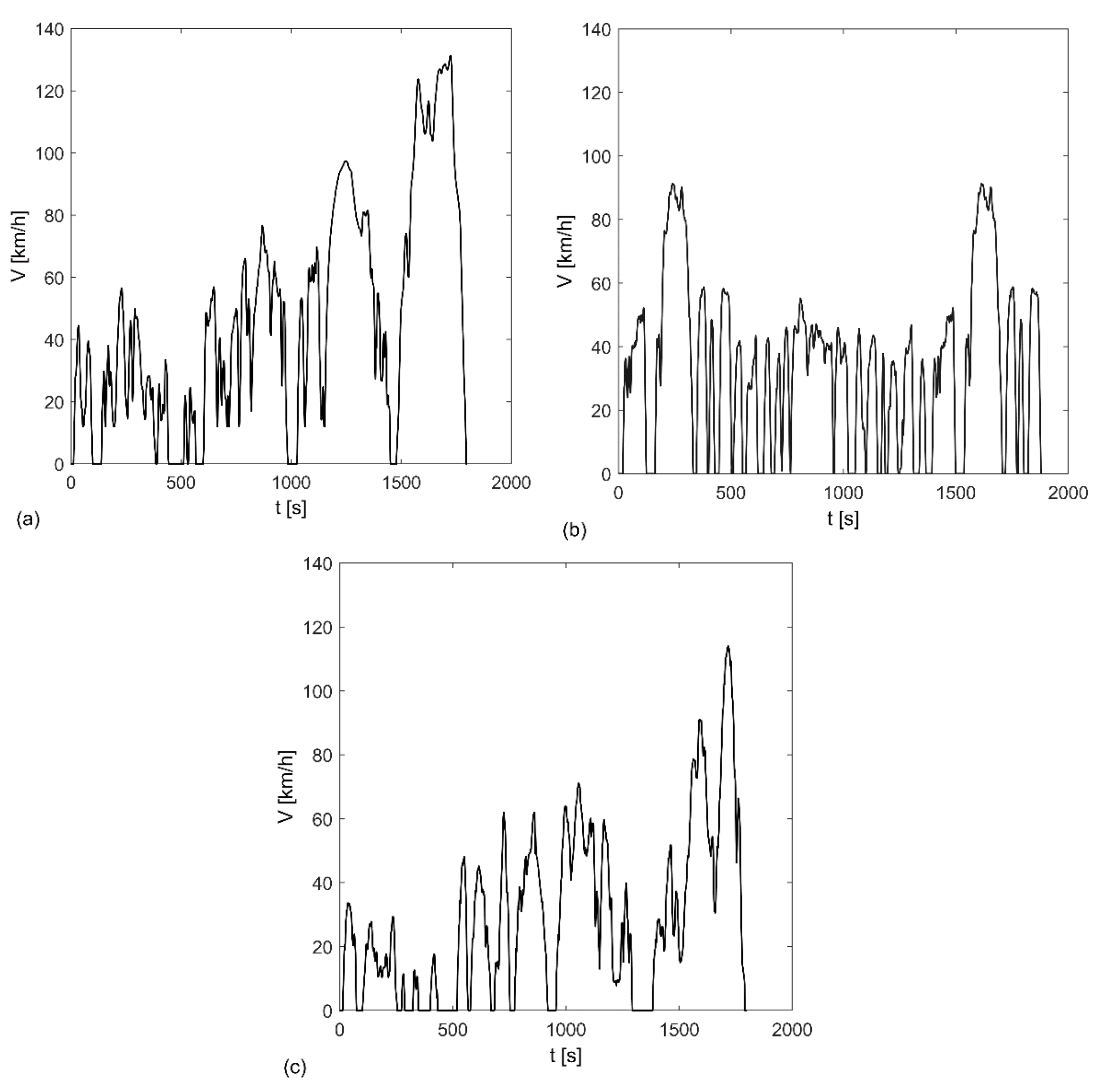
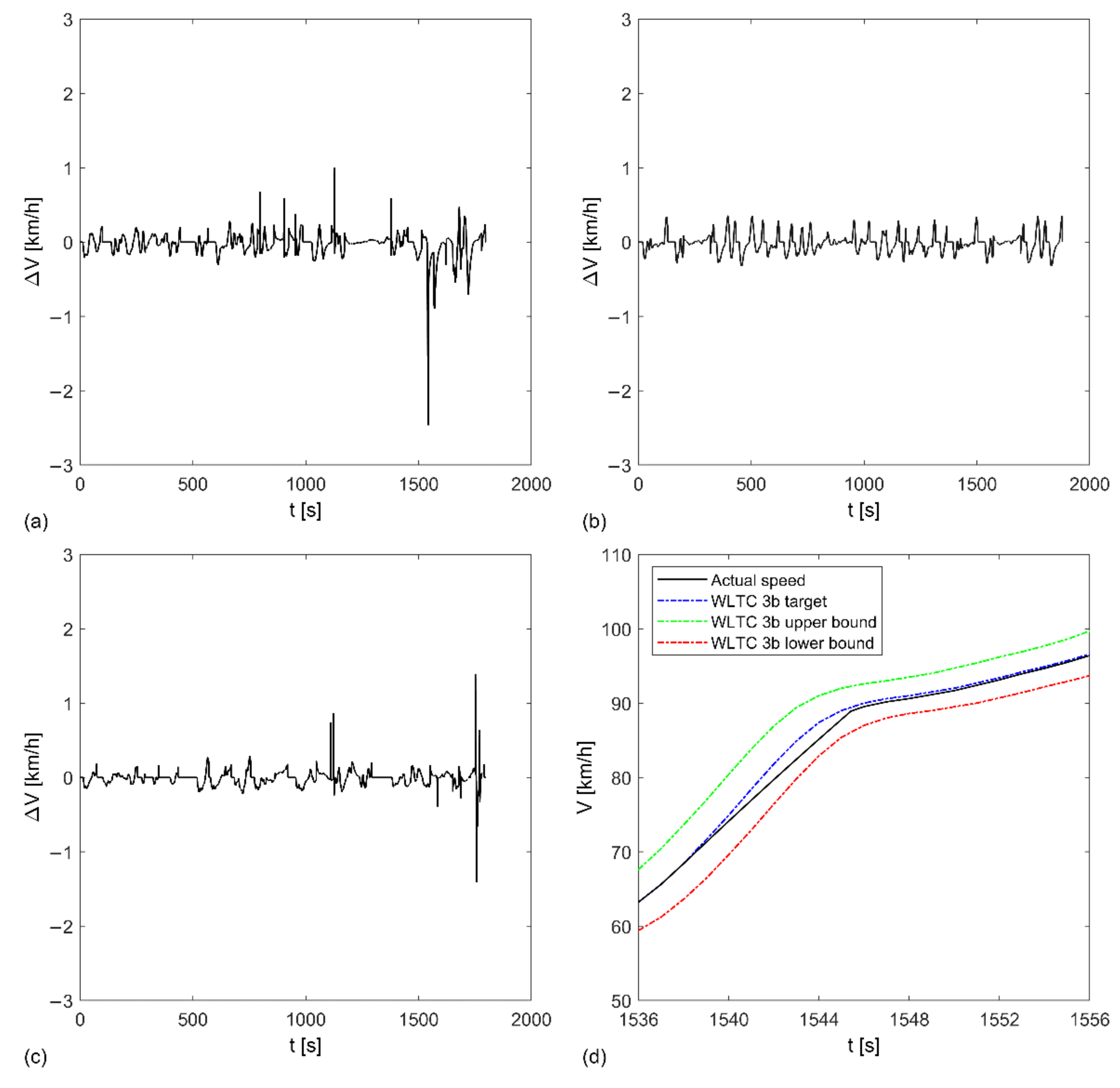
- vehicle speed validation in WLTC 3b, FTP-75, and CLTC-P drive cycles,
- pure electric range (BEV mode),
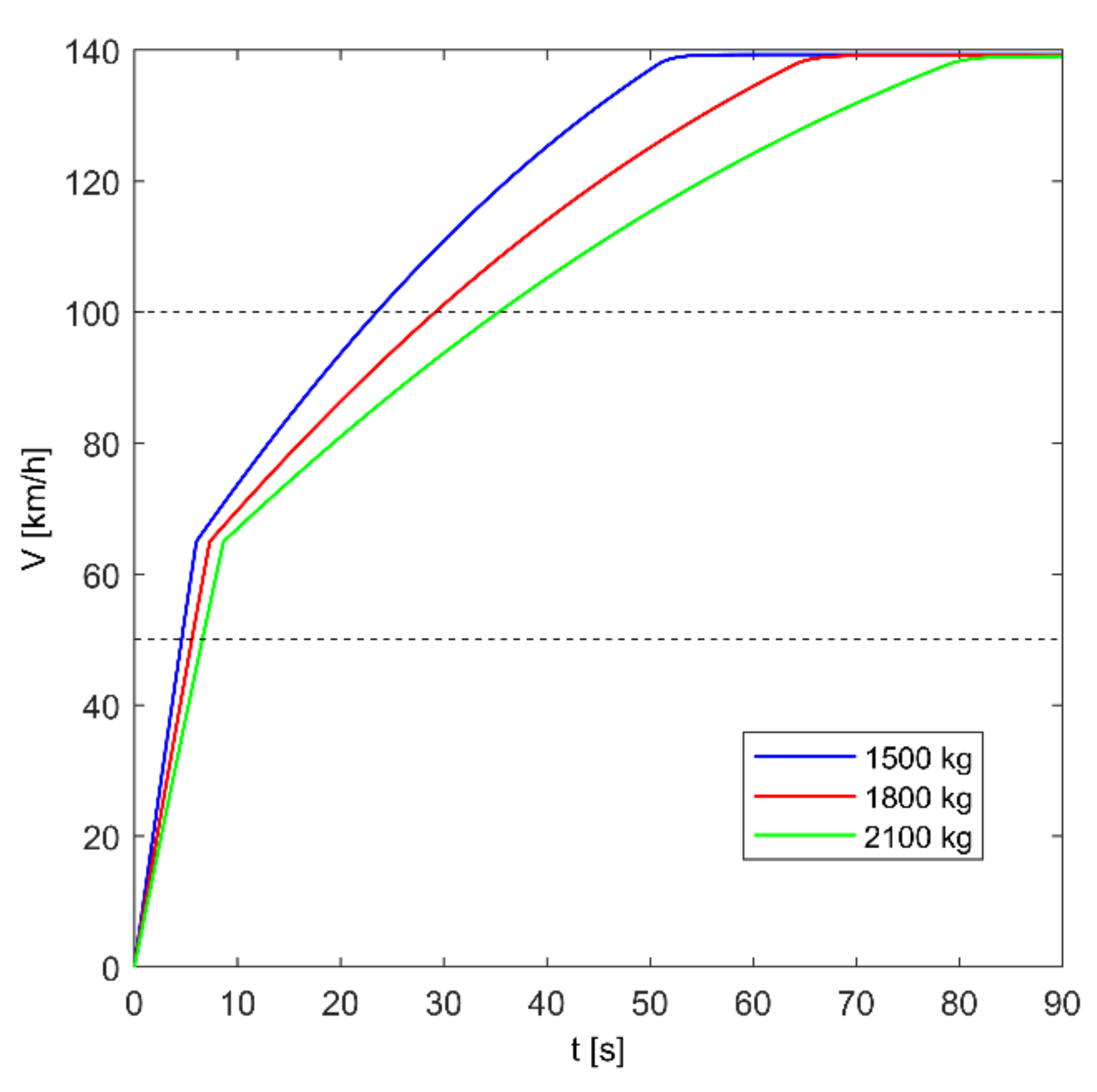
- acceleration times,
- validation of REX control strategy for multiple of range target values,
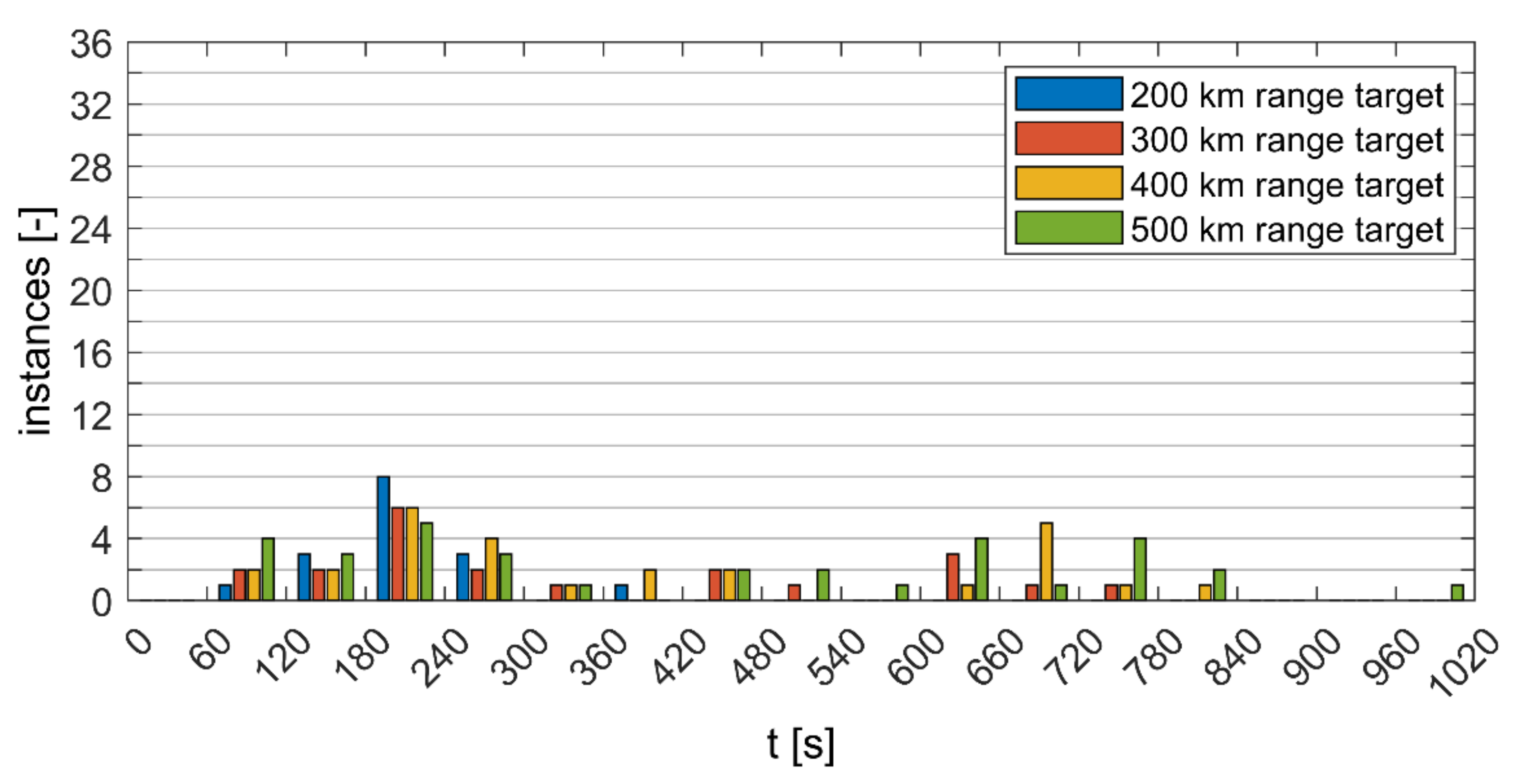
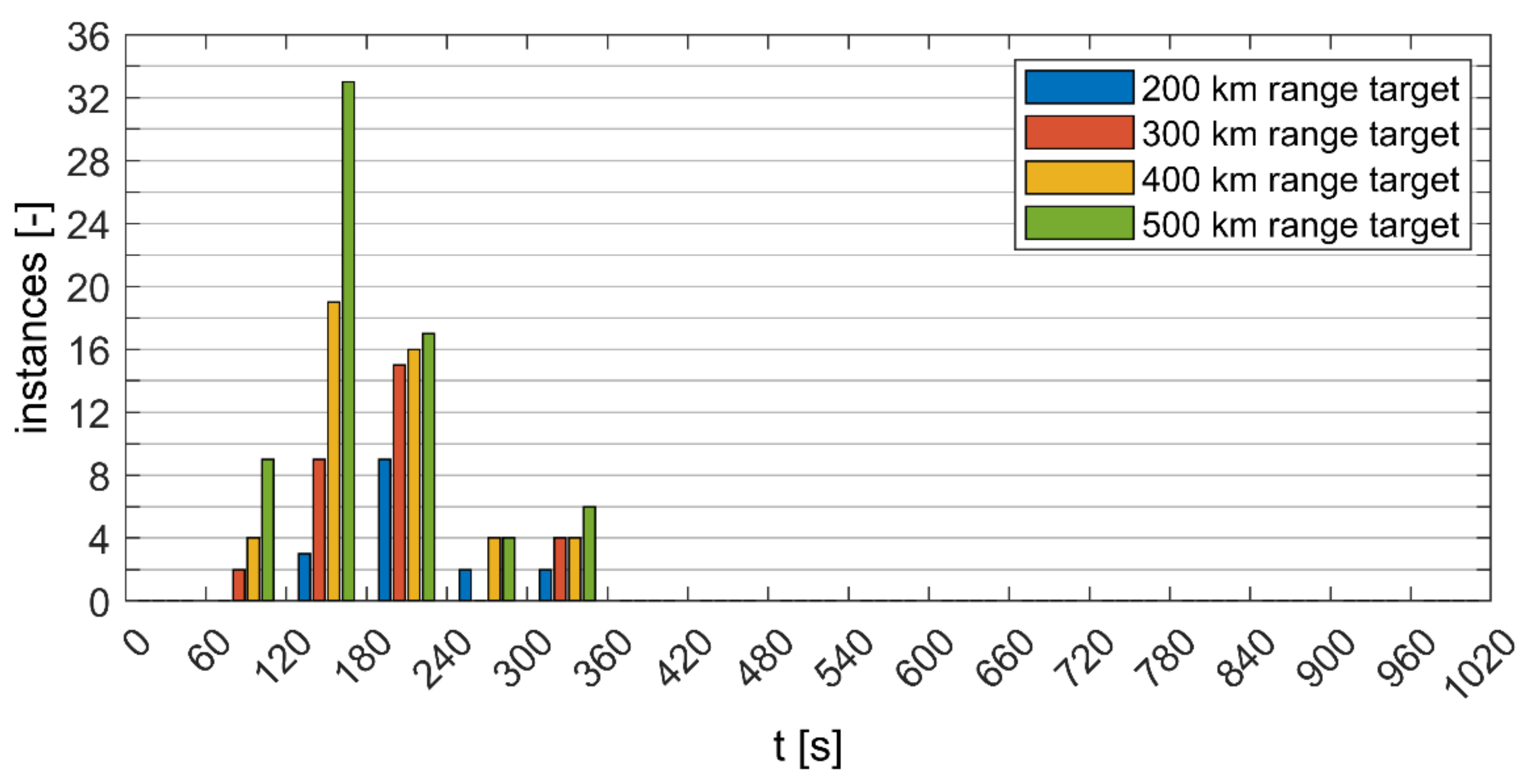
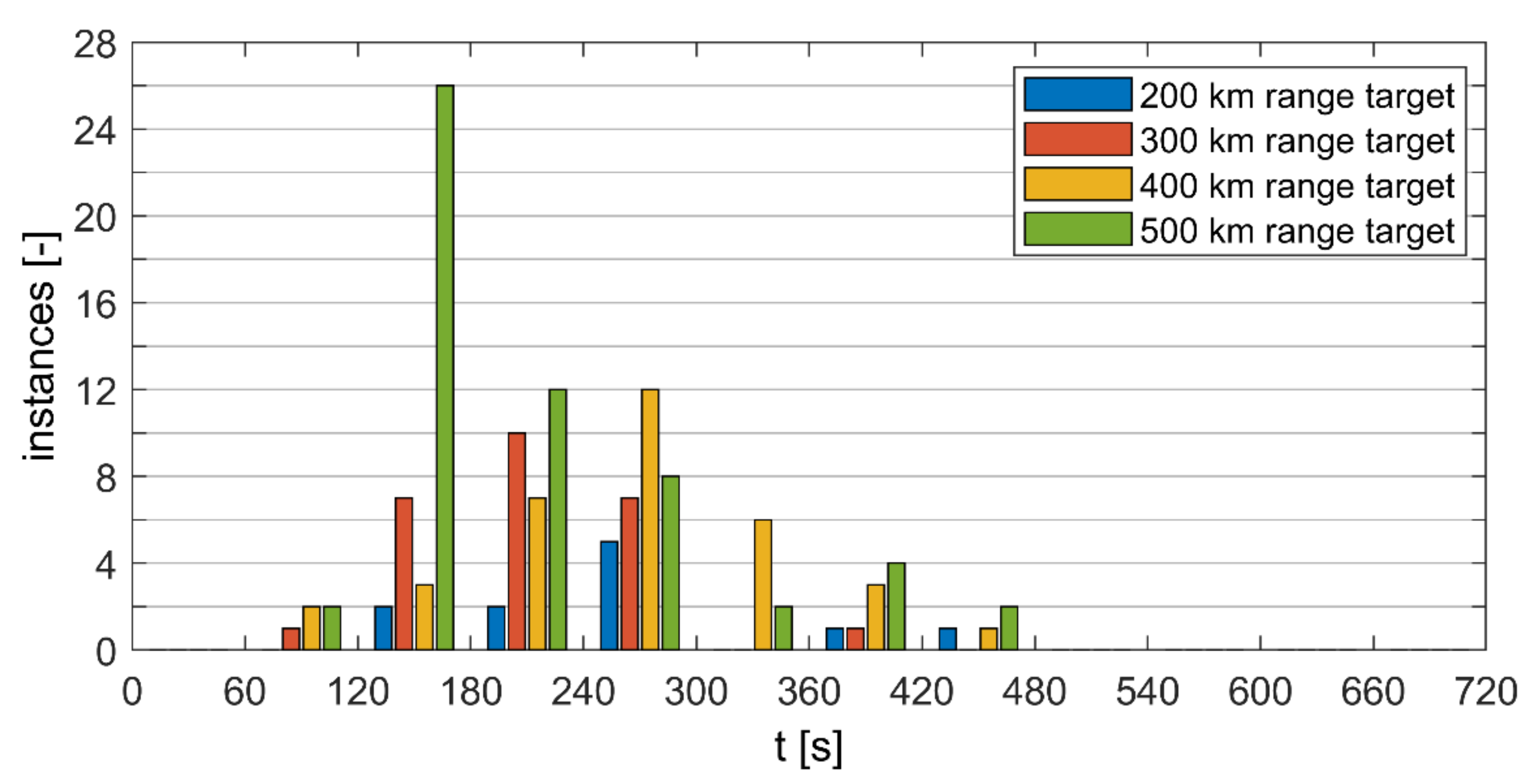
- REX utilization metric and distribution of its engagement instances,
- fuel consumption,
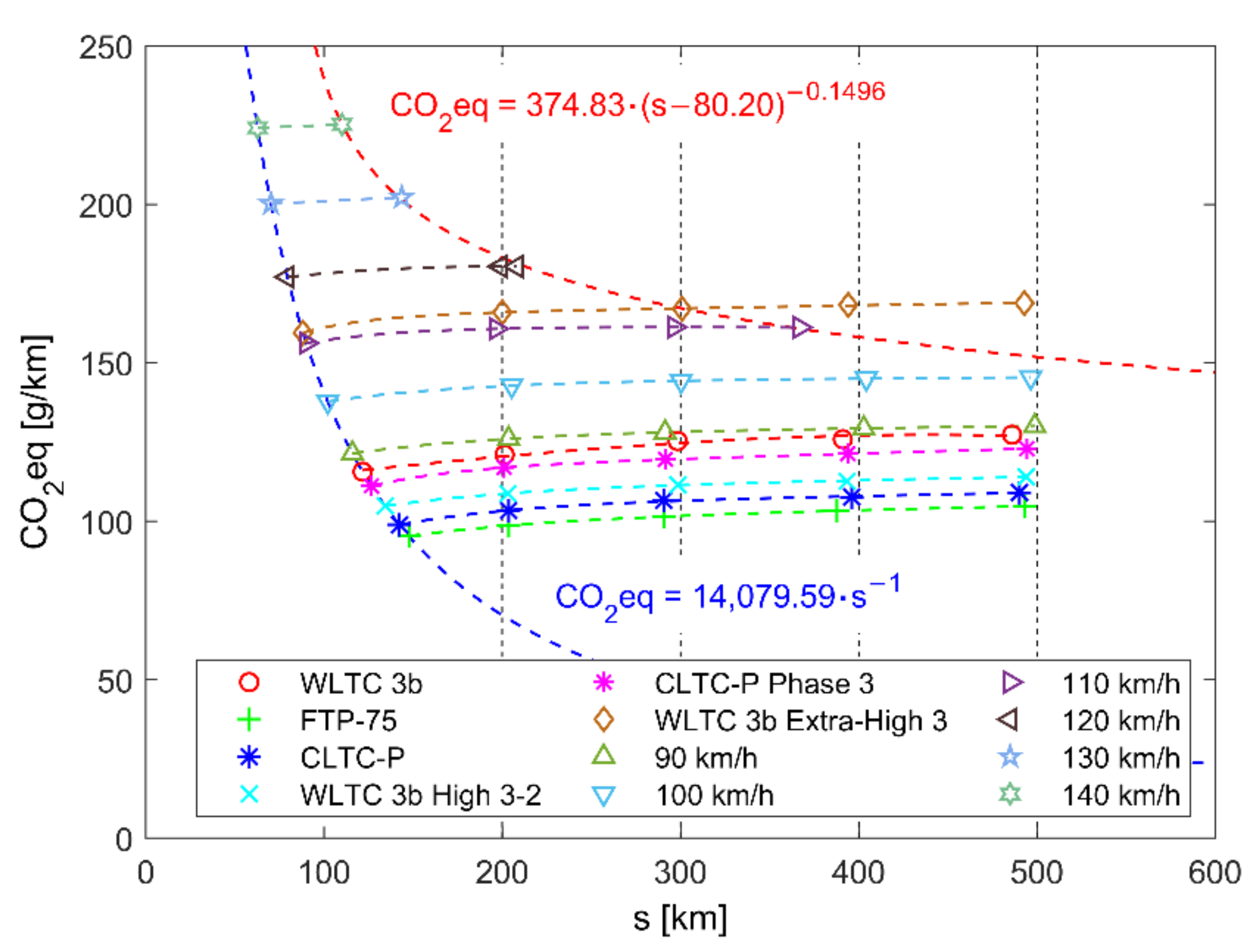
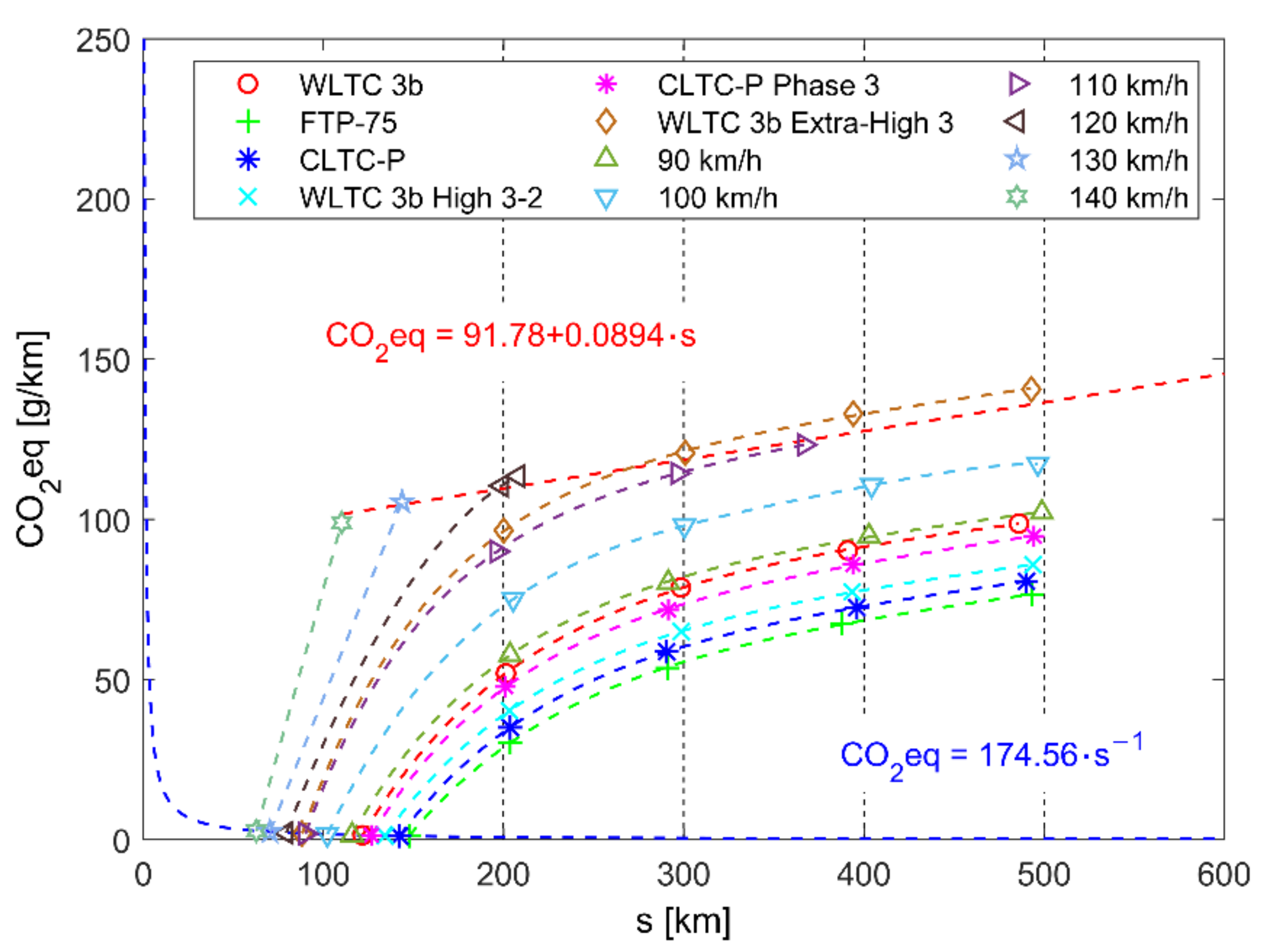
- combined (fuel and electricity) CO2 equivalent emissions,
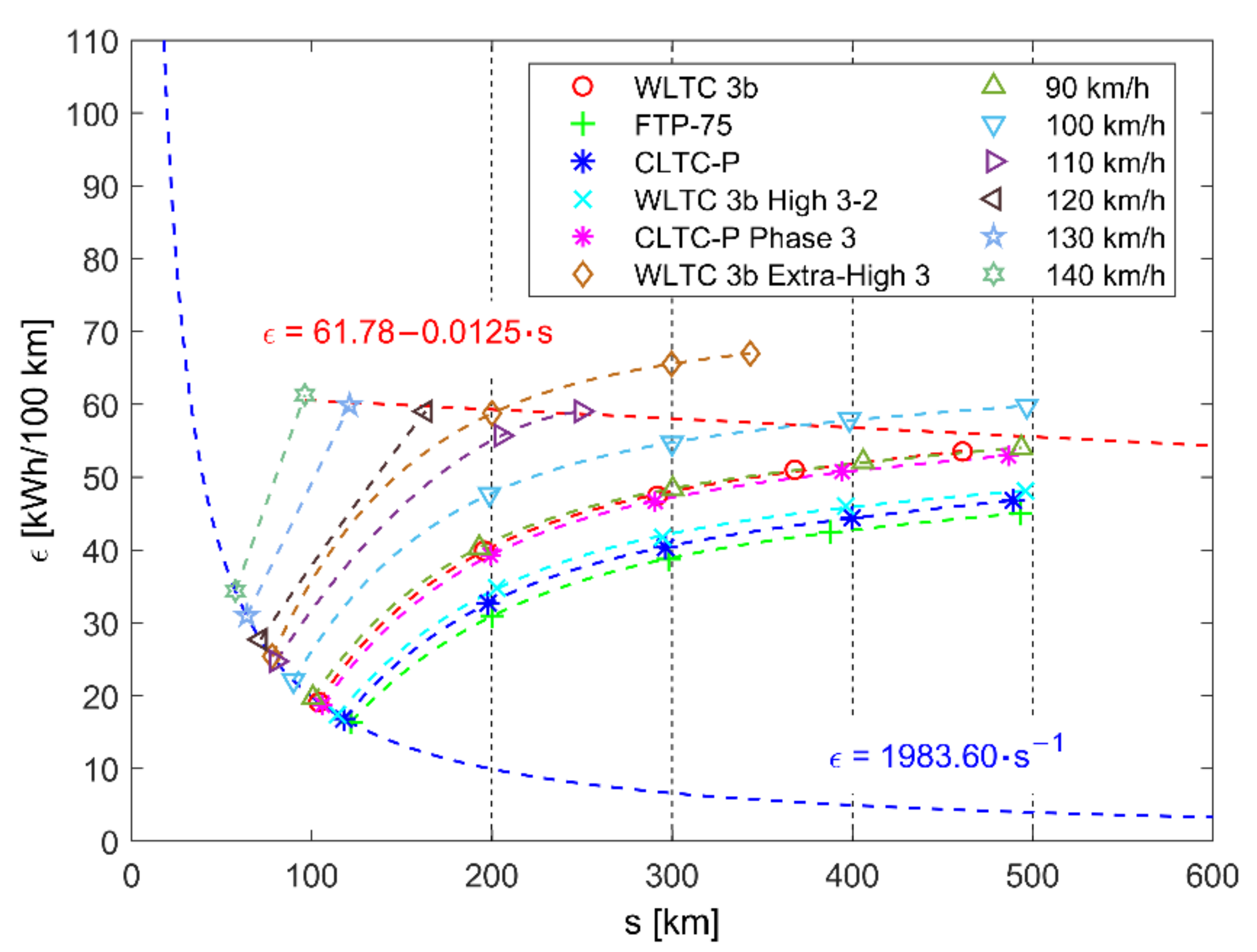
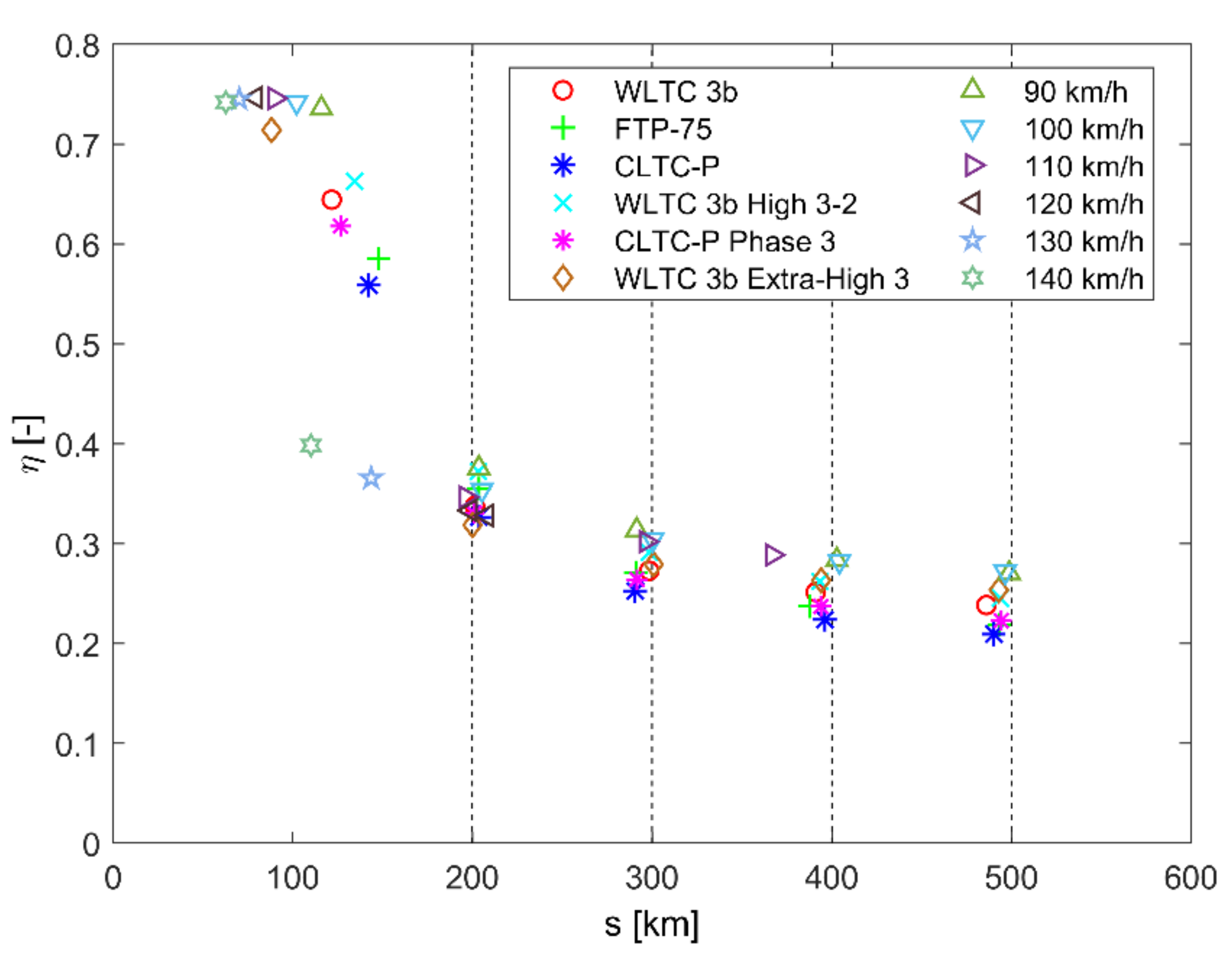
- powertrain efficiency and specific energy consumption.
- The study limitations are presented and finally, conclusions are made.
2. Materials and Methods
2.1. Vehicle Powertrain
2.2. Vehicle Simulation Model
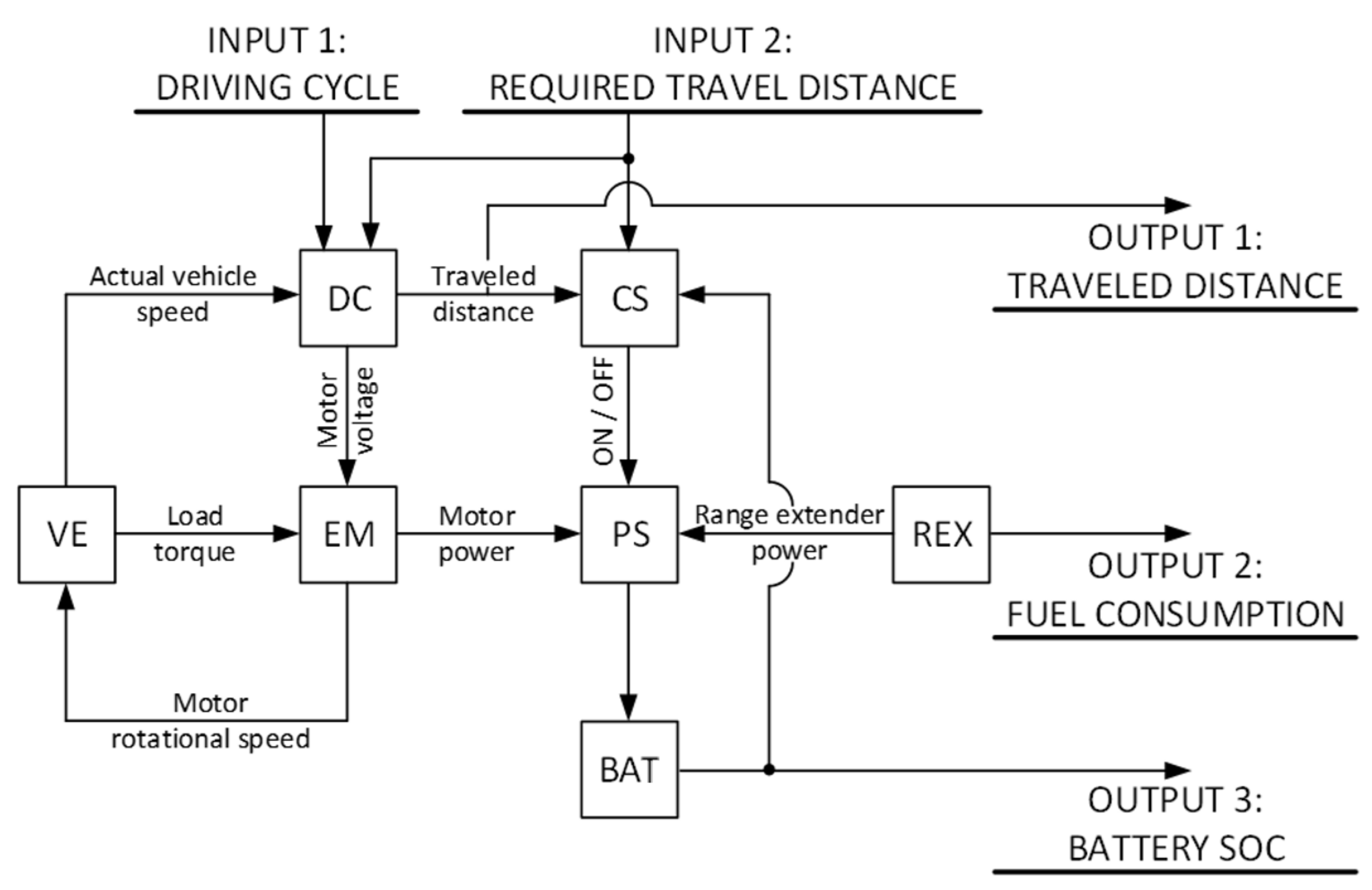
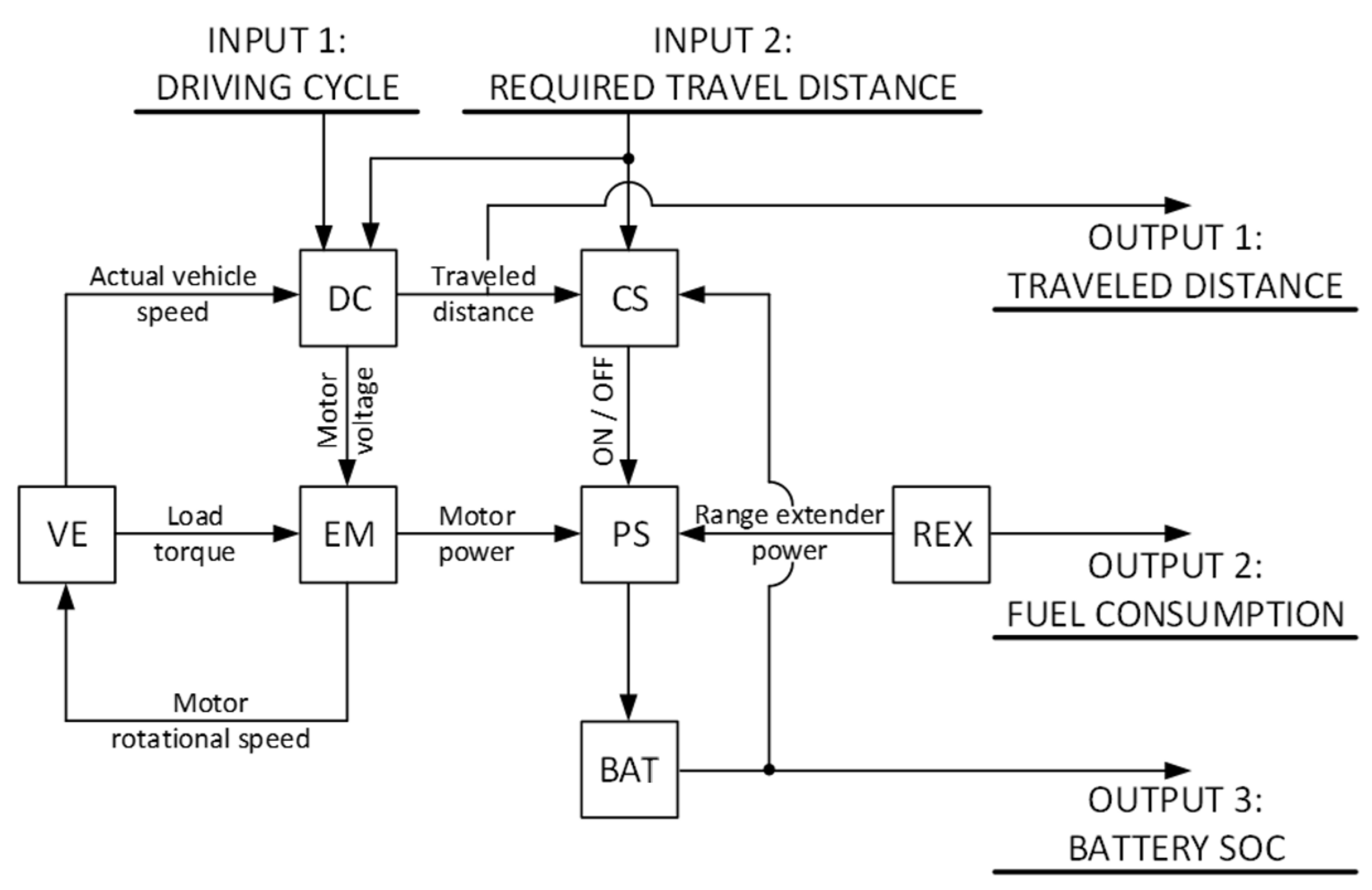
2.2.1. Model Topology
2.2.2. Inputs and Outputs
2.2.3. Vehicle Body and Driveline Model
- tire rolling resistance,
- air drag force,
- and force of inertia of moving vehicle and rotating drivetrain components.
2.2.4. Electric Motor Model
2.2.5. Battery Model
2.2.6. Range Extender Model
2.2.7. Power Summing Node and REX Control Strategy
2.2.8. Test Object Model Parameters
2.3. Simulation Tests Conditions
2.3.1. Main Assumptions of Simulation
- vehicle follows test cycle speed profile,
- vehicle mass is constant during the simulated drive,
- influence of weather conditions (wind, rain, atmospheric pressure, temperature) on the vehicle is neglected,
- there is no road gradient,
- parameters of REX fuel are constant,
- there is no delay in REX start,
- vehicle speed control is the same across all simulated driving cycles,
- thermal phenomena in the motor, controller, and battery are neglected—it is assumed that cooling the vehicle components is sufficient,
- no motor torque and speed overloading,
- instantaneous gear changes,
- no loss of grip between tires and road surface.
2.3.2. Software and Simulation Goals
3. Results and Discussion
3.1. Driving Cycles Speed Validation
3.2. Pure Electric Drive Range and Acceleration Times
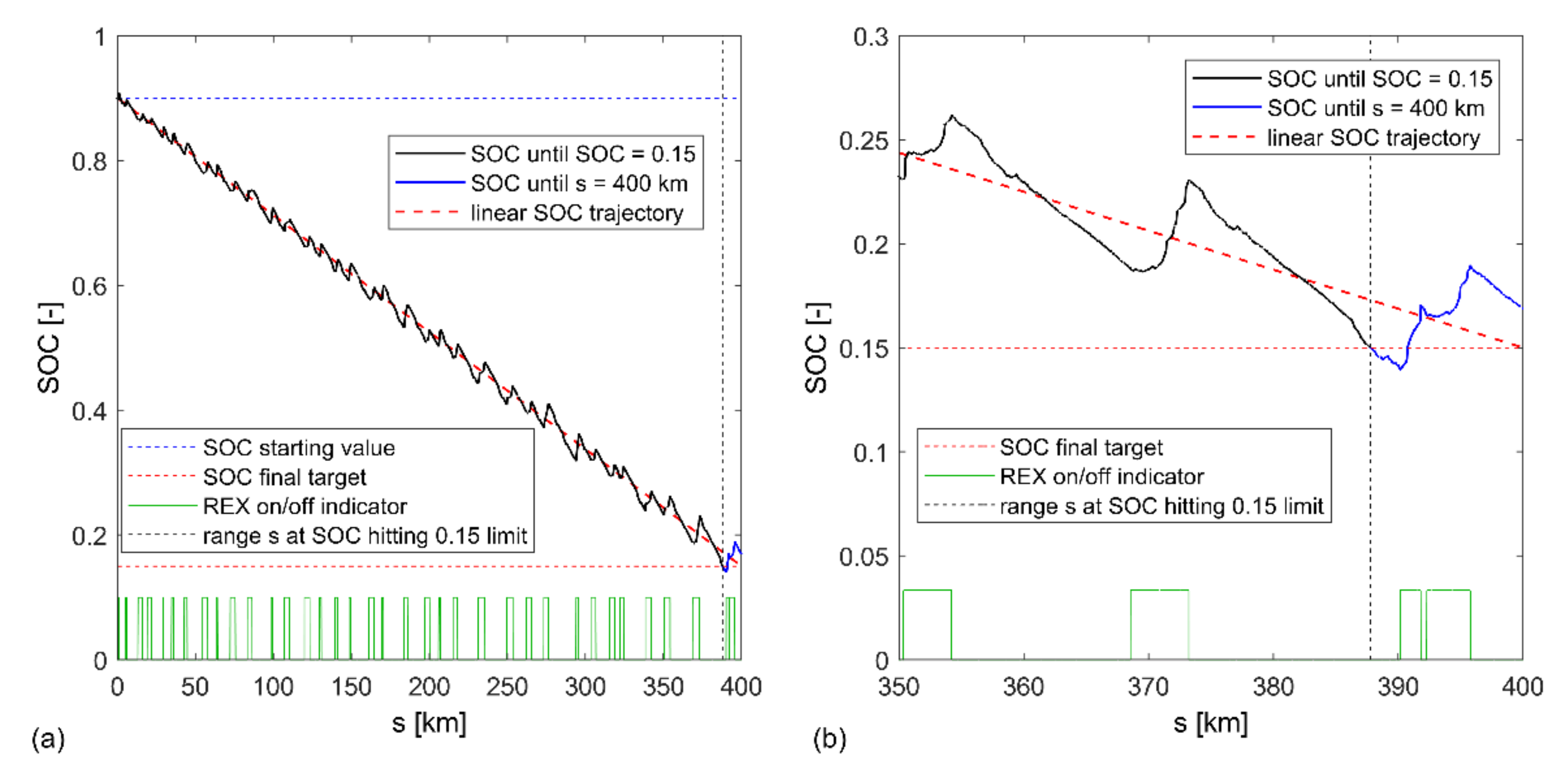
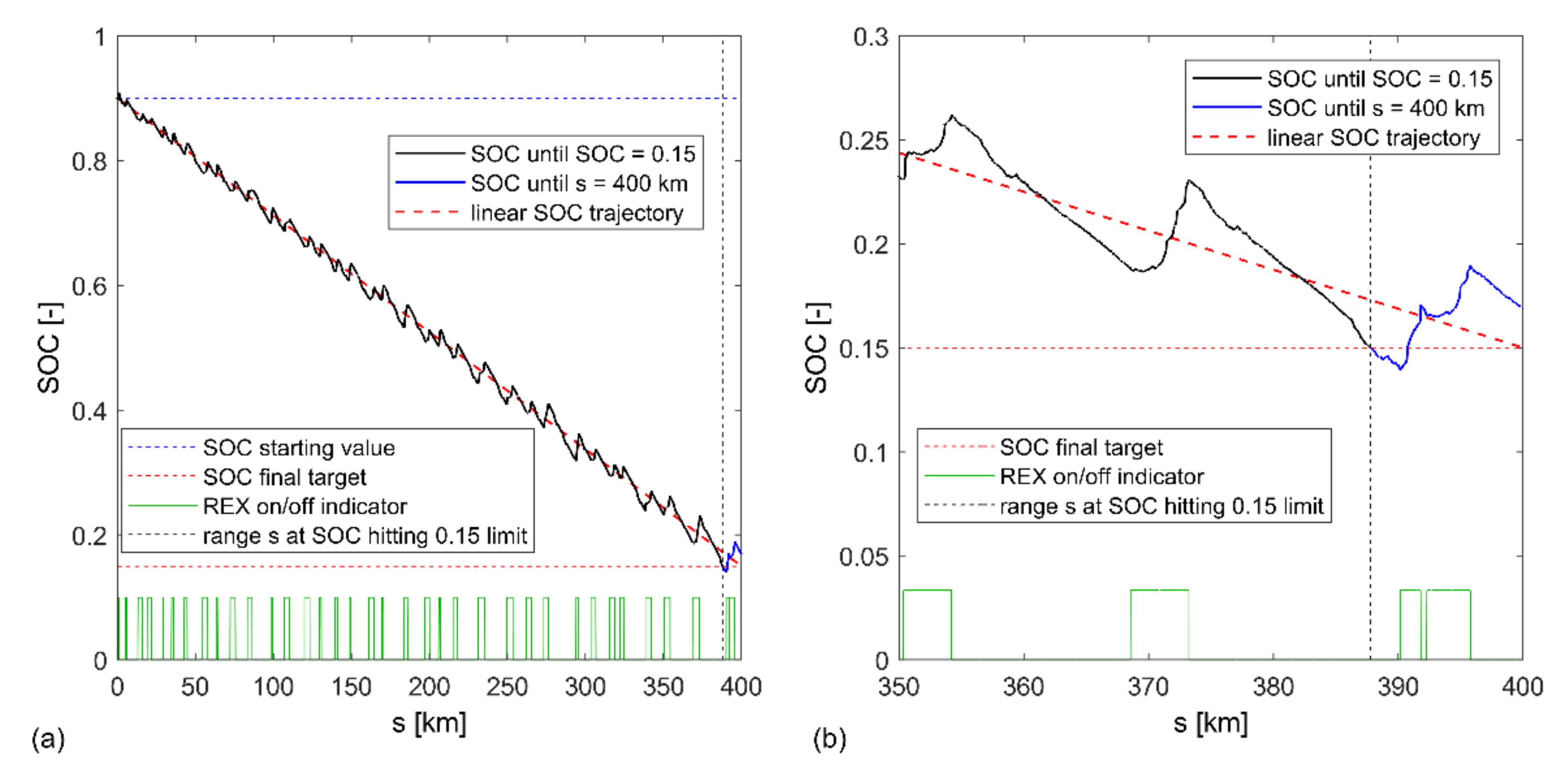
3.3. REX Control Strategy Validation for Range Targets
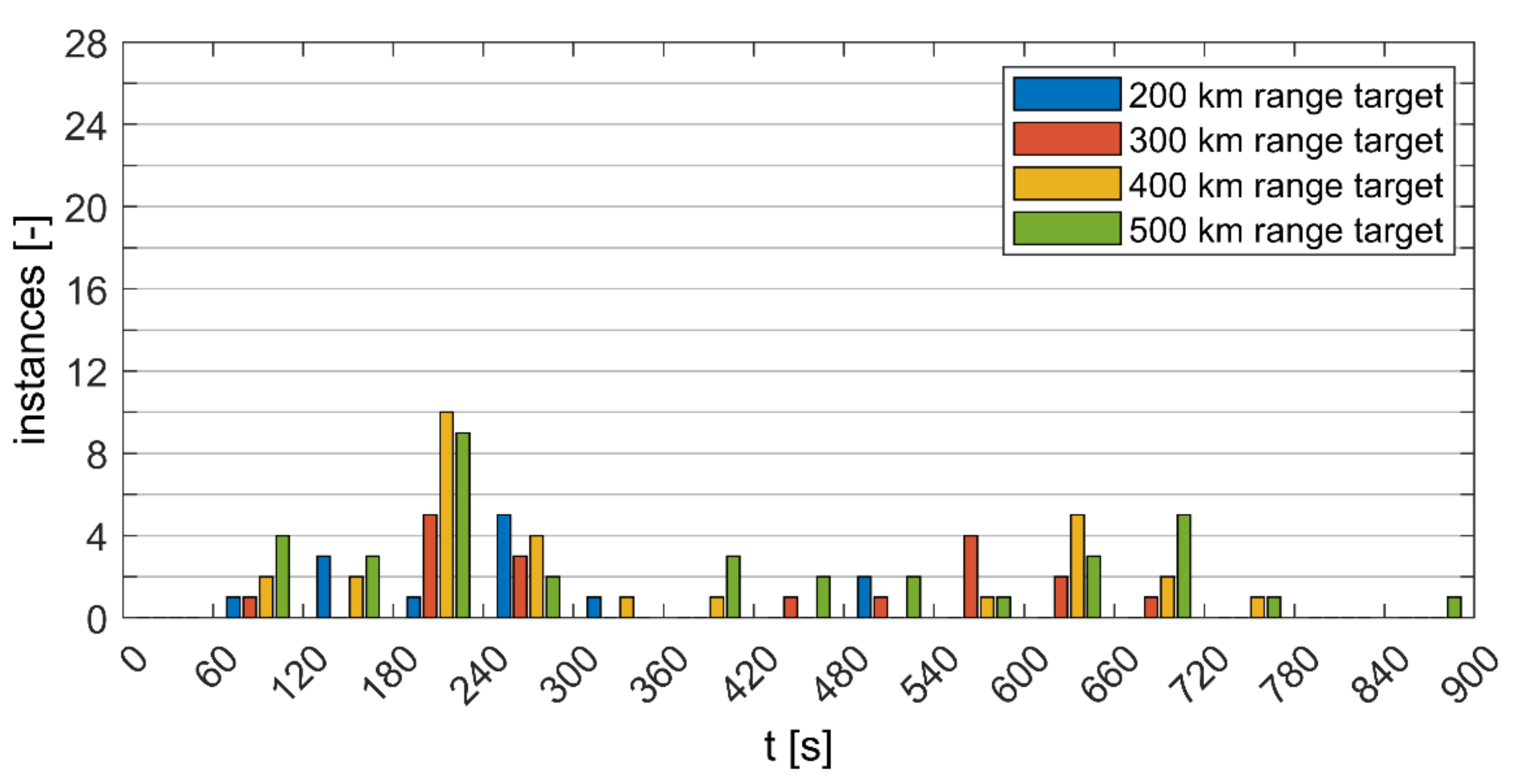
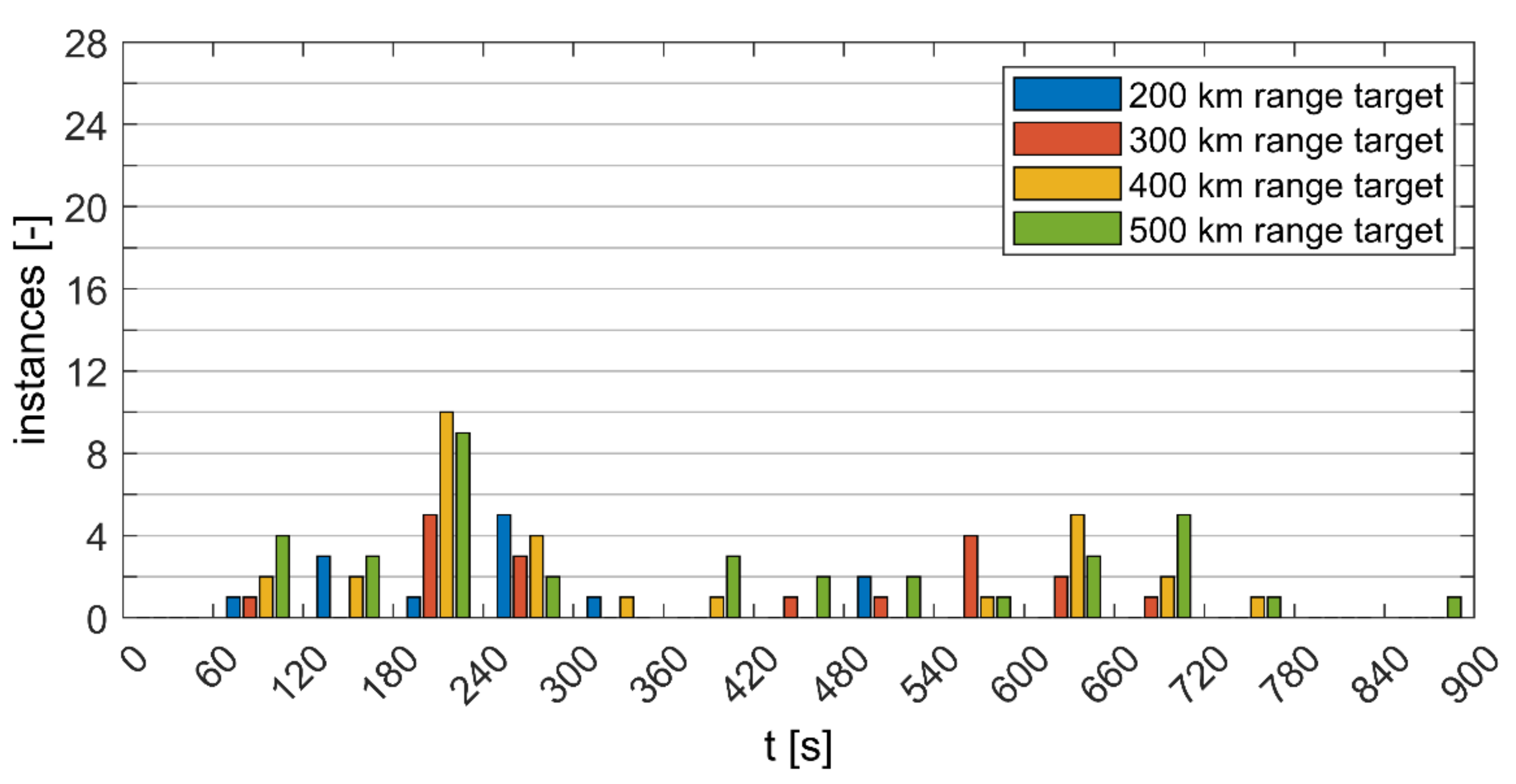
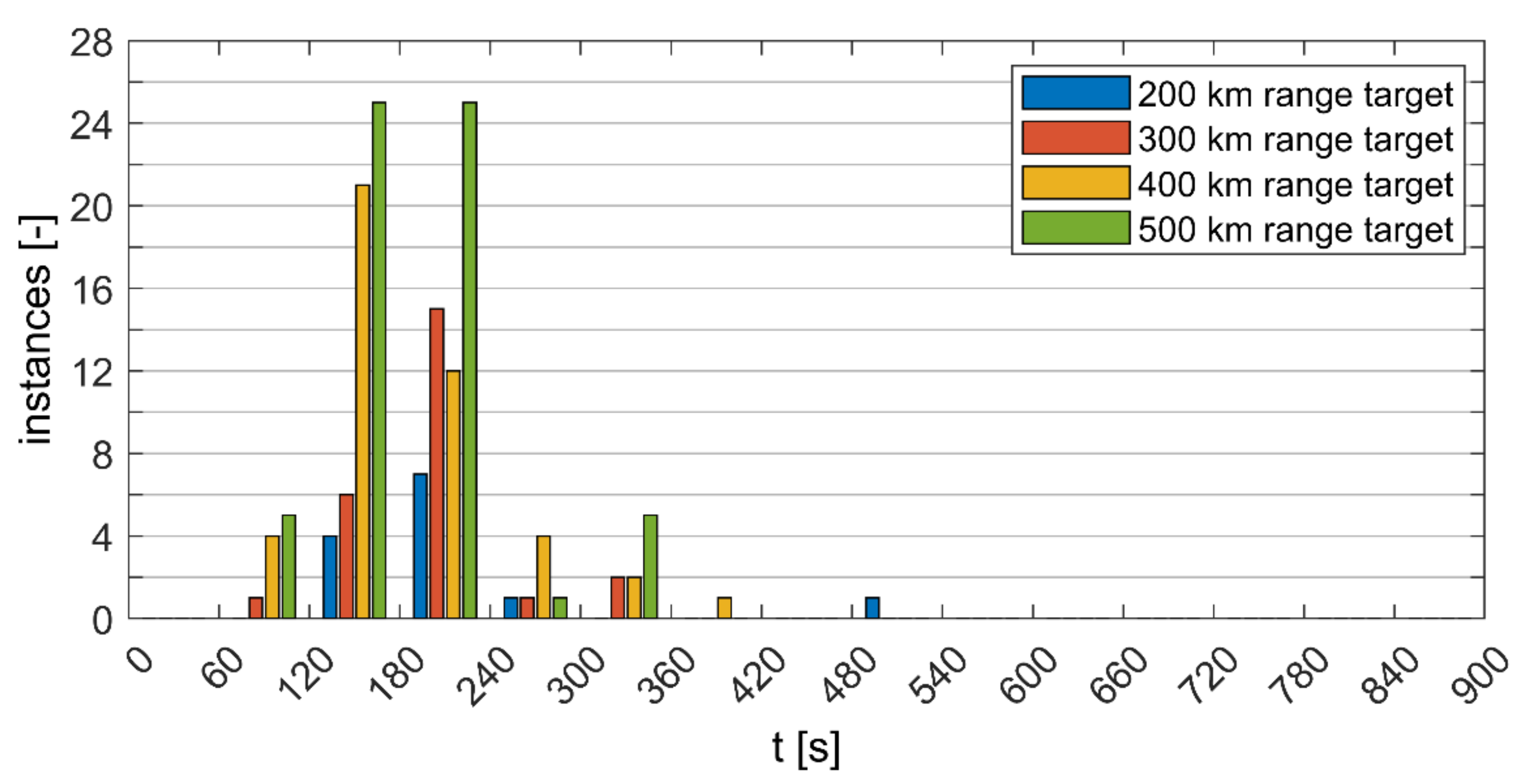
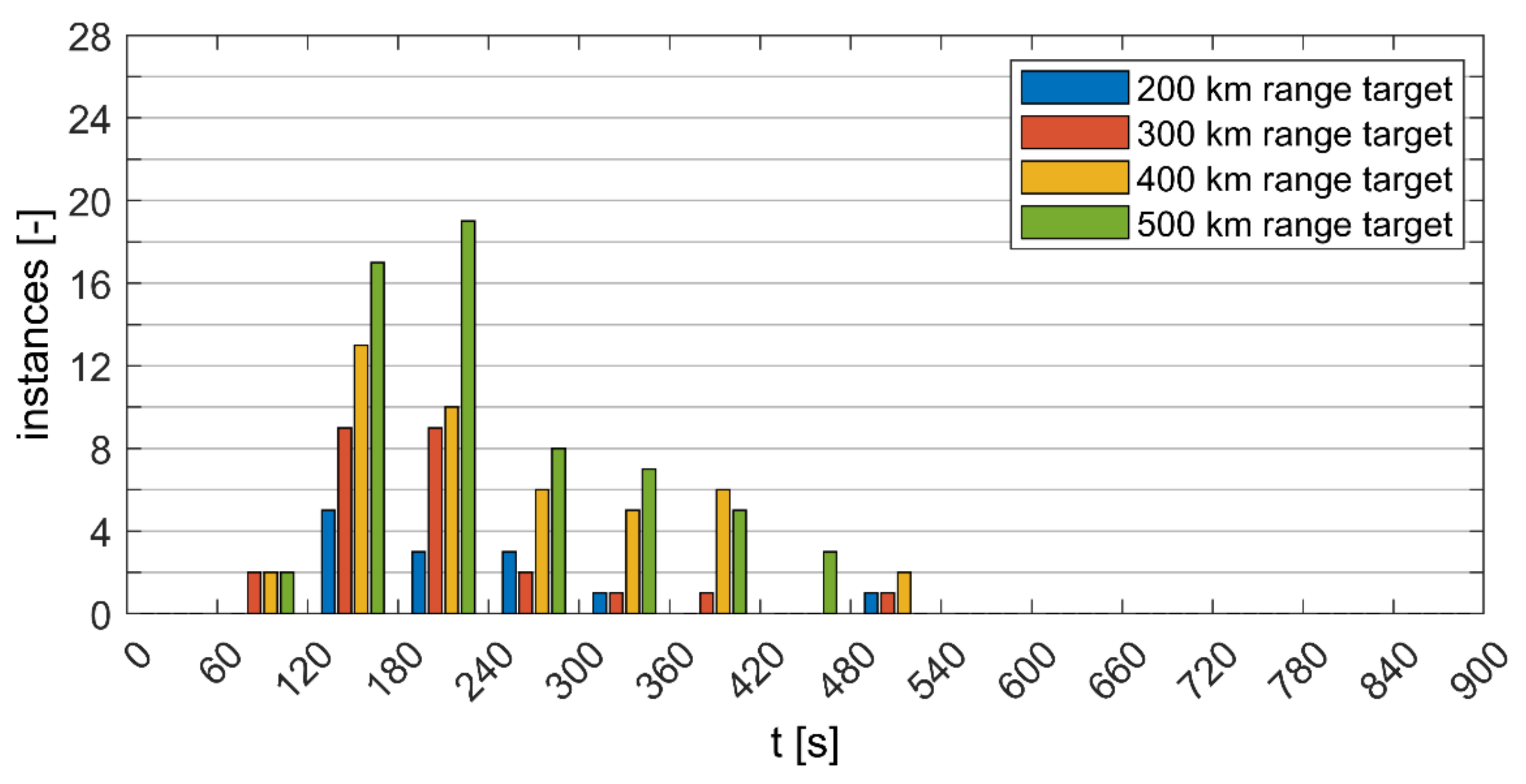
3.4. Range Extender Utilization
3.5. Fuel Consumption
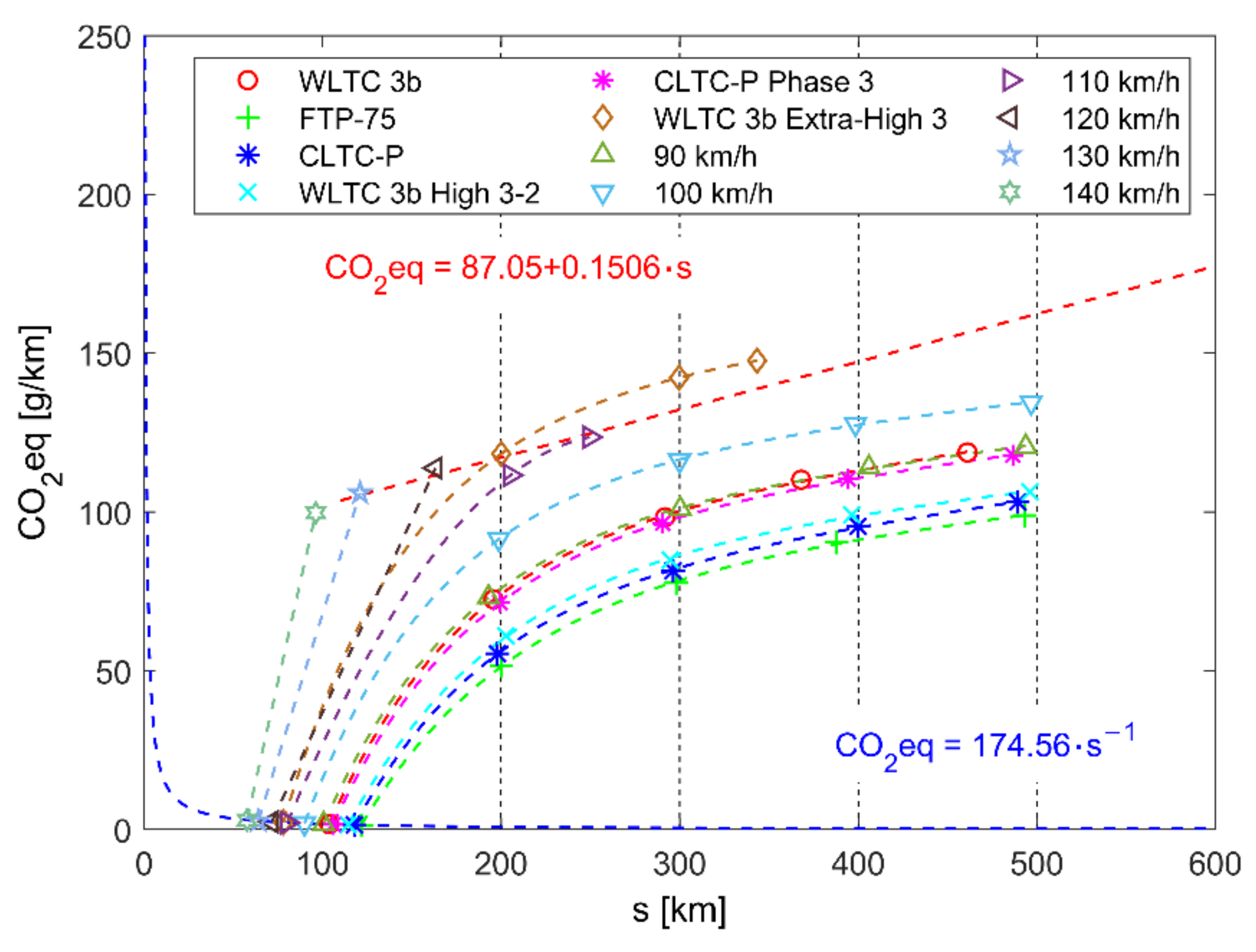
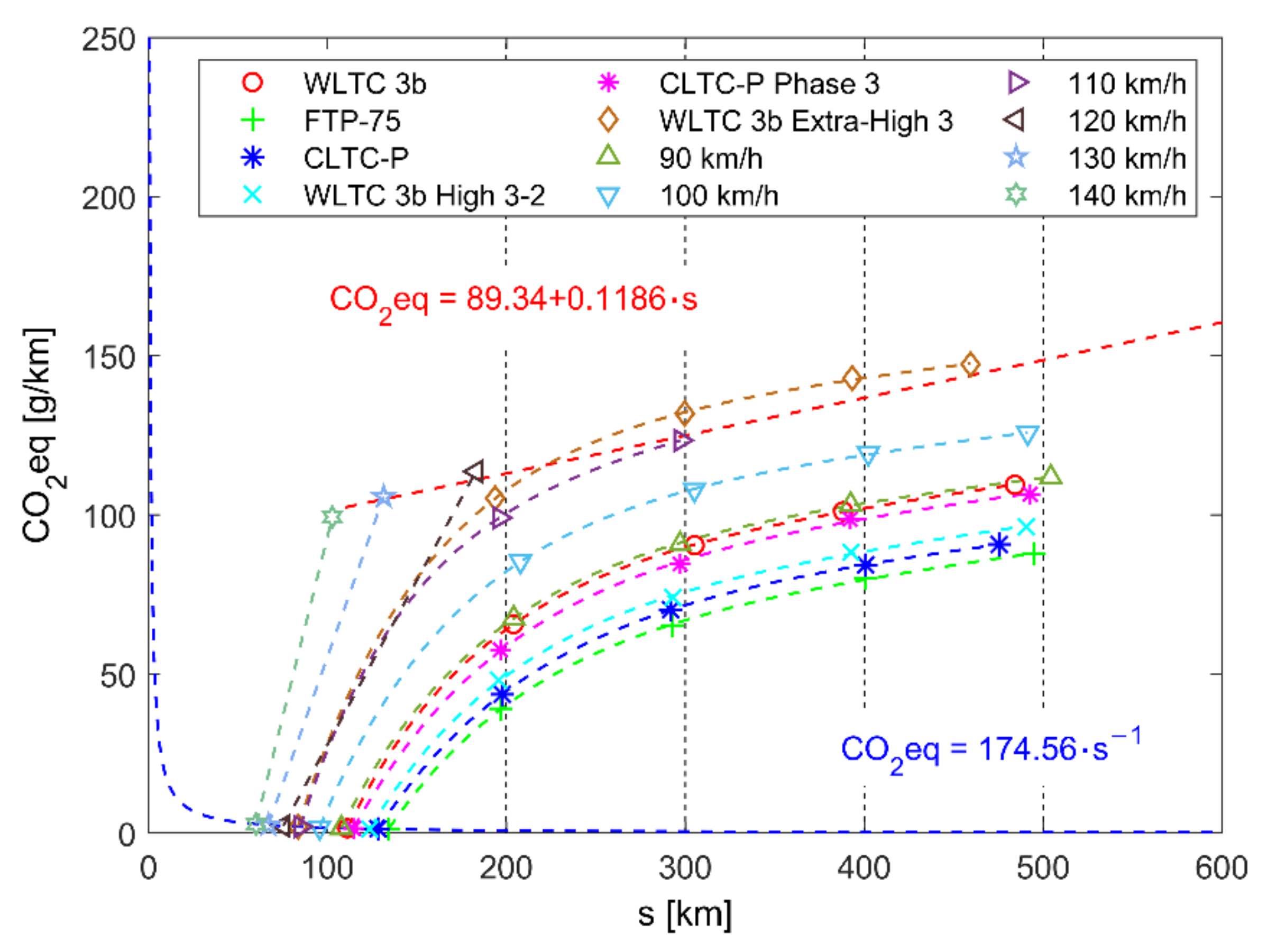
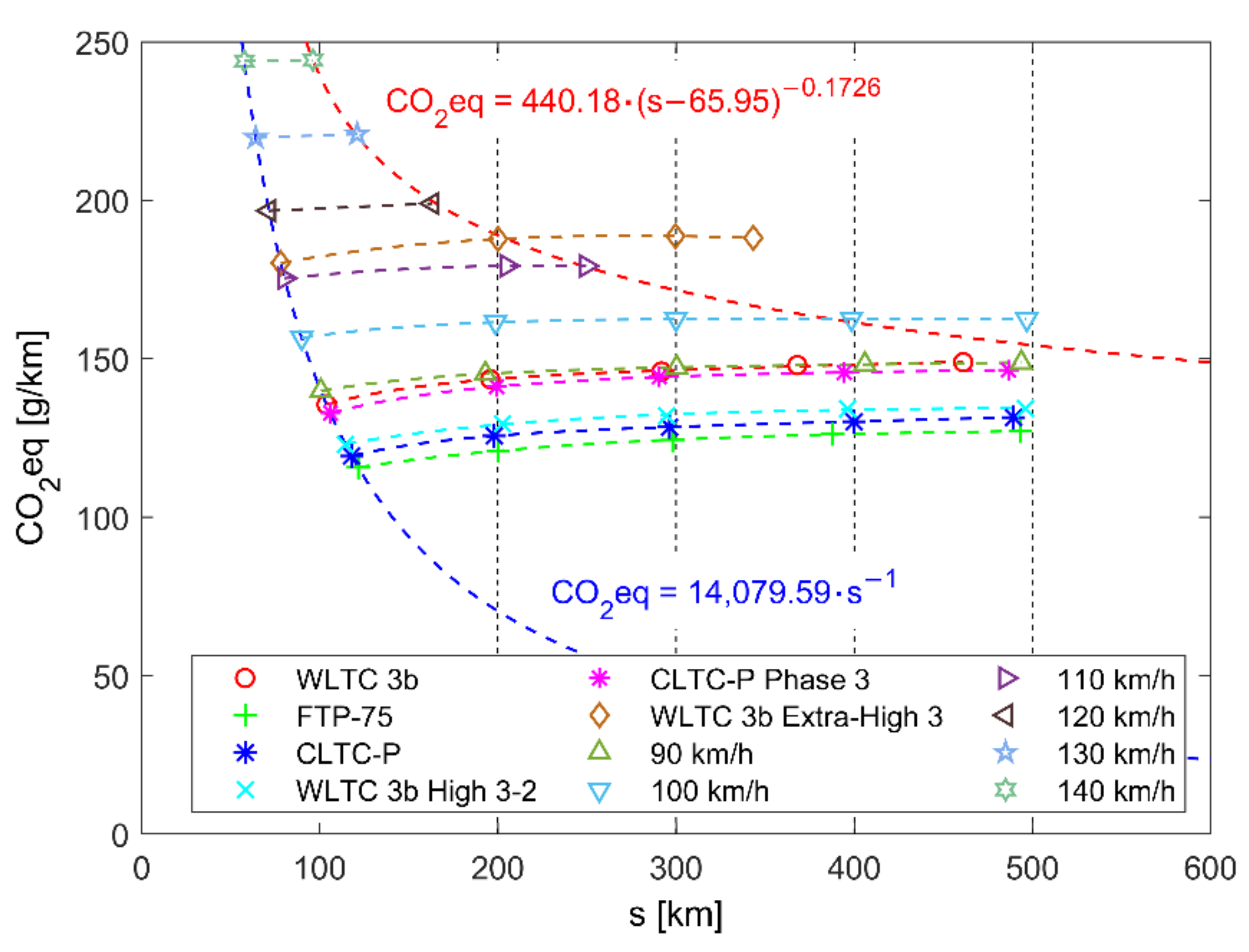
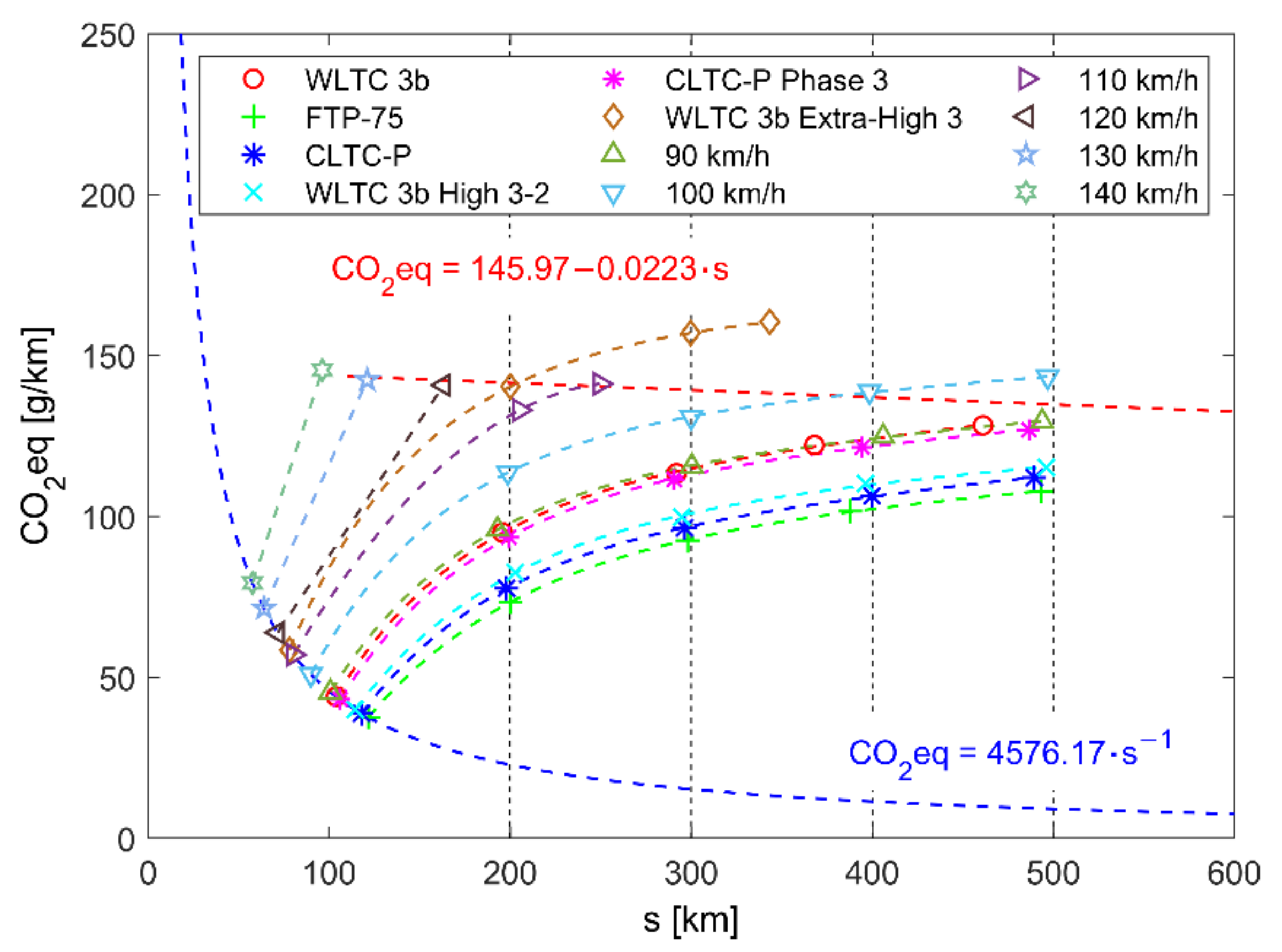
3.6. Combined CO2 Emissions
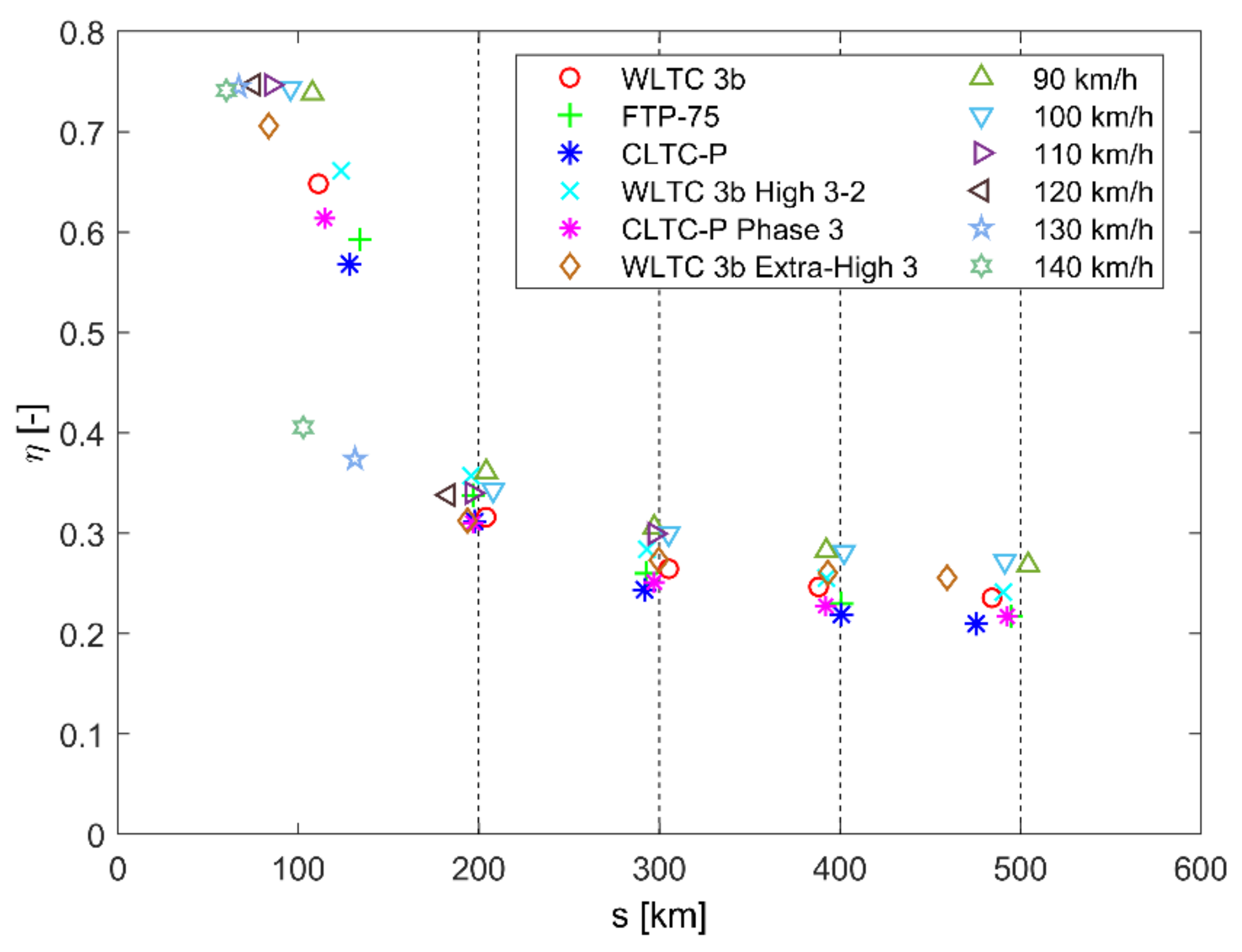
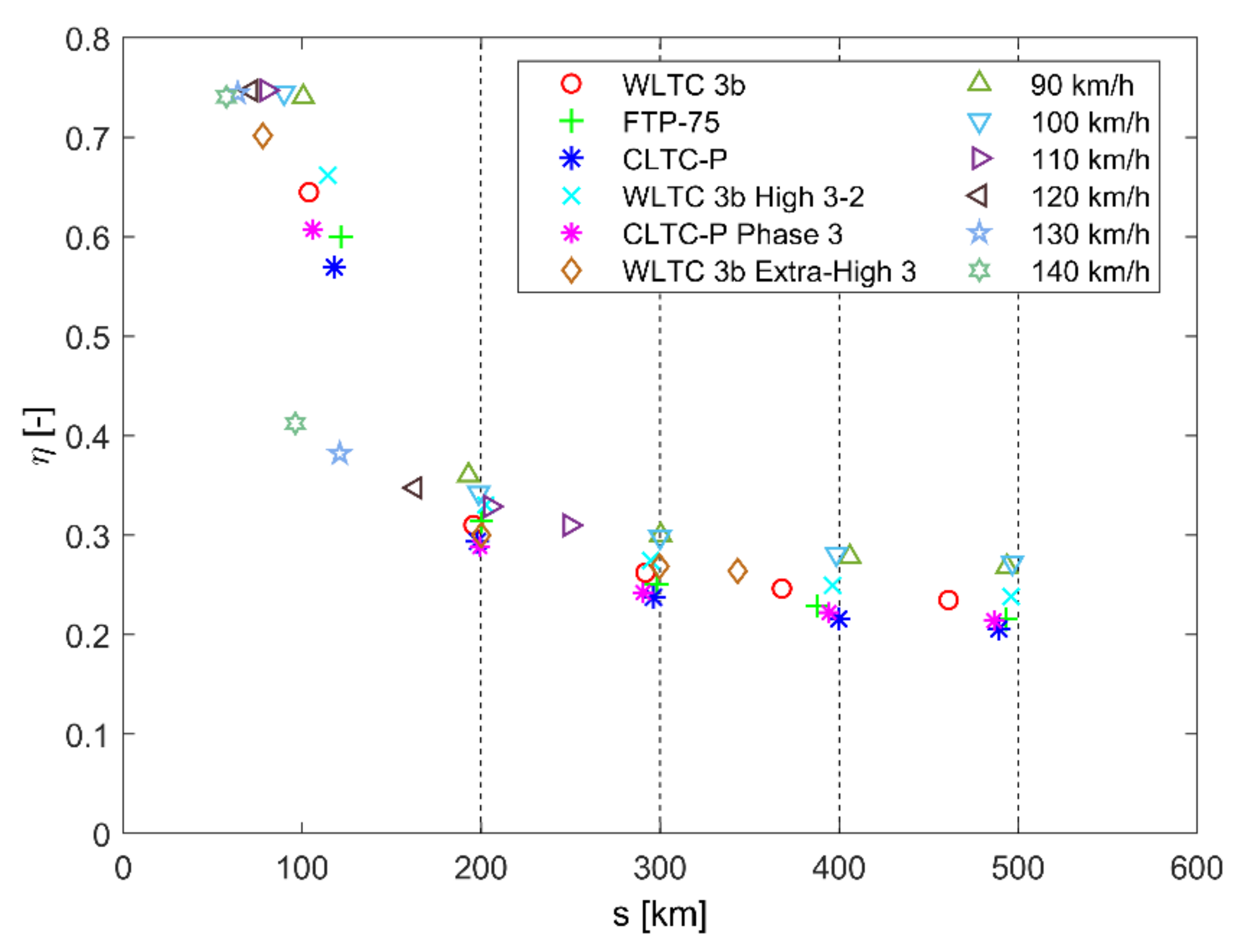
3.7. Powertrain Efficiency and Specific Energy Consumption
3.8. Study Limitations
4. Conclusions
- EREV model based on component modeling is presented and simulation runs were successful.
- The REX control strategy was presented and implemented, with the goal of governing REX operation periods and adapting to the required range target.
- BEV mode ranges were calculated, showing a potential need for extending the BEV range.
- The REX control strategy can cope with various driving conditions—six drive cycles and six constant speeds have been tested, including WLTC 3b, FTP-75, and CLTC-P, for three vehicle masses. Comparisons of the actual ranges obtained to range targets showed good performance of the control strategy, with an average difference between −0.51% and −1.34% for three vehicle mass variants.
- The REX control strategy ensures a linear drop of SOC over traveled distance. Further research on this relation is advised, due to the battery efficiency and battery voltage over drive time potential improvements.
- For some high range targets and more demanding drive conditions REX utilization was close to 100%, showing limitations of range extension for REX in certain power settings.
- The REX engagement instances and running time periods were classified. The REX average run time instance, as well as the majority of instance run times were well above the set “soft minimum” of 120 s. The distribution of binned run time instances showed for WLTC 3b is much broader in time spectrum, with a more uniform value count, compared to FTP-75 and CLTC-P.
- Fuel consumption was calculated. The CO2eq emission contribution from the fuel is independent of the country or the region in which EREV is operated. For Sweden, this results in a vast increase of EREV CO2eq emission over the BEV mode operation. This cautions moderation in setting range extension targets over the BEV mode range.
- For countries with high CO2eq emission from grid electricity, like the presented case of Poland, EREV CO2eq emission proves to be staying at high levels, no matter what range target was selected.
- The results show detailed relations between EREV CO2eq emission and vehicle range. Areas of possible emission are pointed out, showing the broad range of possible values. This further emphasized need for treating EVER accordingly to local conditions, especially to CO2 transport emission policy.
- EREV powertrain efficiency stays within the range of 21.0–41.2% for tested cases. These are respectable values but fall short of the BEV mode efficiency range of 55.9–74.7%. Yet still, EREV has the capability of BEV mode drive, having the possibility of zero tailpipe emission and range extension when needed.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| BAT | Electrochemical battery pack |
| BEV | Battery Electric Vehicle |
| BSFC | Brake Specific Fuel Consumption |
| CLTC | China Light-Duty Vehicle Test Cycle |
| CO2eq | Carbon Dioxide Equivalent |
| CS | Control Strategy |
| DC | Driving Cycle |
| ECU | Electronic Control Unit |
| EM | Electric Motor |
| EREV | Extended-Range Electric Vehicle |
| EV | Electric Vehicle |
| FTP-75 | Federal Test Procedure |
| G | Electric generator |
| H. | High |
| HEV | Hybrid Electric Vehicle |
| ICE | Internal Combustion Engine |
| LAV | Leisure Activity Vehicle |
| LPG | Liquefied Petroleum Gas |
| PI | Proportional-Integral |
| PMSM | Permanent Magnet Synchronous Motor |
| PS | Power summing node |
| REX | Range Extender |
| SOC | State of Charge |
| VE | Vehicle and driveline |
| W | Road wheels |
| WLTC 3b | Worldwide Harmonized Light-duty Test Cycle Class 3b |
| ZDAC | Zero d-axis current control strategy |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Range Target | 200 km | 300 km | 400 km | 500 km |
|---|---|---|---|---|
| WLTC 3b | 204.02 (2.01) | 305.23 (1.74) | 388.20 (−2.95) | 484.25 (−3.15) |
| FTP-75 | 196.88 (−1.56) | 292.71 (−2.43) | 400.90 (0.22) | 494.80 (−1.04) |
| CLTC-P | 197.66 (−1.17) | 291.82 (−2.73) | 400.80 (0.20) | 475.46 (−4.91) |
| WLTC 3b High 3-2 | 195.81 (−2.09) | 293.12 (−2.29) | 392.60 (−1.85) | 490.61 (−1.88) |
| CLTC-P Phase 3 | 196.78 (−1.61) | 297.13 (−0.96) | 392.11 (−1.97) | 492.75 (−1.45) |
| WLTC 3b Extra-H. 3 | 193.68 (−3.16) | 299.62 (−0.13) | 393.33 (−1.67) | 459.34 (−8.13) |
| 90 km/h | 204.14 (2.07) | 297.12 (−0.96) | 392.45 (−1.89) | 504.31 (0.86) |
| 100 km/h | 207.94 (3.97) | 305.13 (1.71) | 402.32 (0.58) | 491.38 (−1.73) |
| 110 km/h | 196.18 (−1.91) | 297.34 (−0.89) | 297.37 (−25.66) | 297.39 (−40.52) |
| 120 km/h | 183.02 (−8.49) | 183.02 (−38.99) | 183.02 (−54.24) | 183.02 (−63.40) |
| 130 km/h | 131.43 (−34.29) | 131.44 (−56.19) | 131.46 (−67.14) | 131.47 (−73.71) |
| 140 km/h | 102.76 (−48.62) | 102.76 (−65.75) | 102.76 (−74.31) | 102.76 (−79.45) |
| Unit | km (%) | km (%) | km (%) | km (%) |
| Range Target | 200 km | 300 km | 400 km | 500 km |
|---|---|---|---|---|
| WLTC 3b | 195.75 (−2.12) | 291.87 (−2.71) | 368.06 (−7.98) | 461.17 (−7.77) |
| FTP-75 | 200.18 (0.09) | 298.09 (−0.64) | 388.09 (−2.98) | 493.18 (−1.37) |
| CLTC-P | 198.01 (−0.99) | 296.35 (−1.22) | 399.99 (−0.00) | 489.46 (−2.11) |
| WLTC 3b High 3-2 | 202.74 (1.37) | 294.72 (−1.76) | 396.36 (−0.91) | 496.21 (−0.76) |
| CLTC-P Phase 3 | 199.38 (−0.31) | 290.67 (−3.11) | 394.26 (−1.44) | 486.56 (−2.69) |
| WLTC 3b Extra-H. 3 | 200.19 (0.09) | 299.75 (−0.08) | 343.32 (−14.17) | 343.36 (−31.33) |
| 90 km/h | 193.00 (−3.50) | 300.34 (0.11) | 406.00 (1.50) | 493.80 (−1.24) |
| 100 km/h | 198.68 (−0.66) | 299.97 (−0.01) | 398.45 (−0.39) | 496.85 (−0.63) |
| 110 km/h | 205.21 (2.61) | 249.63 (−16.79) | 249.66 (−37.59) | 249.68 (−50.06) |
| 120 km/h | 163.28 (−18.36) | 163.28 (−45.57) | 163.28 (−59.18) | 163.28 (−67.34) |
| 130 km/h | 121.03 (−39.48) | 121.05 (−59.65) | 121.06 (−69.73) | 121.07 (−75.79) |
| 140 km/h | 96.24 (−51.88) | 96.24 (−67.92) | 96.24 (−75.94) | 96.24 (−80.75) |
| Unit | km (%) | km (%) | km (%) | km (%) |
| Range Target | 200 km | 300 km | 400 km | 500 km |
|---|---|---|---|---|
| WLTC 3b | 266 (13) | 401 (18) | 354 (29) | 375 (37) |
| FTP-75 | 195 (10) | 196 (25) | 188 (44) | 183 (61) |
| CLTC-P | 220 (10) | 211 (25) | 243 (36) | 233 (48) |
| Unit | s (-) | s (-) | s (-) | s (-) |
| Range Target | 200 km | 300 km | 400 km | 500 km |
|---|---|---|---|---|
| WLTC 3b | 228 (16) | 356 (21) | 393 (27) | 422 (34) |
| FTP-75 | 219 (12) | 199 (30) | 192 (47) | 182 (69) |
| CLTC-P | 256 (11) | 261 (24) | 235 (42) | 214 (61) |
| Unit | s (-) | s (-) | s (-) | s (-) |
| Range Target | 200 km | 300 km | 400 km | 500 km |
|---|---|---|---|---|
| WLTC 3b | 21.56 | 30.04 | 33.78 | 36.84 |
| FTP-75 | 9.34 | 15.85 | 19.48 | 21.35 |
| CLTC-P | 8.80 | 14.36 | 17.45 | 18.84 |
| WLTC 3b High 3-2 | 19.16 | 30.11 | 35.86 | 38.99 |
| CLTC-P Phase 3 | 20.60 | 30.68 | 35.53 | 38.55 |
| WLTC 3b Extra-H. 3 | 69.43 | 87.31 | 96.05 | 99.87 |
| 90 km/h | 43.70 | 59.03 | 67.20 | 72.86 |
| 100 km/h | 61.72 | 78.51 | 87.19 | 92.13 |
| 110 km/h | 79.28 | 99.93 | 99.94 | 99.94 |
| 120 km/h | 99.87 | 99.87 | 99.87 | 99.87 |
| 130 km/h | 99.81 | 99.82 | 99.83 | 99.84 |
| 140 km/h | 99.74 | 99.74 | 99.74 | 99.74 |
| Unit | % | % | % | % |
| Range Target | 200 km | 300 km | 400 km | 500 km |
|---|---|---|---|---|
| WLTC 3b | 23.39 | 32.66 | 37.02 | 40.03 |
| FTP-75 | 12.49 | 18.81 | 21.97 | 24.00 |
| CLTC-P | 11.28 | 16.84 | 19.71 | 21.37 |
| WLTC 3b High 3-2 | 24.52 | 34.39 | 40.08 | 43.14 |
| CLTC-P Phase 3 | 25.68 | 34.76 | 39.91 | 42.78 |
| WLTC 3b Extra-H. 3 | 77.64 | 94.83 | 99.82 | 99.84 |
| 90 km/h | 47.31 | 65.78 | 74.43 | 78.80 |
| 100 km/h | 66.25 | 84.79 | 93.78 | 99.21 |
| 110 km/h | 89.64 | 99.91 | 99.91 | 99.92 |
| 120 km/h | 99.84 | 99.84 | 99.84 | 99.84 |
| 130 km/h | 99.76 | 99.78 | 99.79 | 99.80 |
| 140 km/h | 99.68 | 99.68 | 99.68 | 99.68 |
| Unit | % | % | % | % |
| Range Target | 200 km | 300 km | 400 km | 500 km |
|---|---|---|---|---|
| Mass = 1500 kg | 1.84 (203.34) | 3.00 (298.60) | 3.58 (393.62) | 3.98 (493.87) |
| Mass = 1800 kg | 2.19 (195.81) | 3.42 (293.12) | 4.09 (392.60) | 4.47 (490.61) |
| Mass = 2100 kg | 2.80 (202.74) | 3.92 (294.72) | 4.60 (396.36) | 4.94 (496.21) |
| Unit | dm3/100 km (km) | dm3/100 km (km) | dm3/100 km (km) | dm3/100 km (km) |
| Range Target | 200 km | 300 km | 400 km | 500 km |
|---|---|---|---|---|
| Mass = 1500 kg | 2.18 (201.05) | 3.32 (291.58) | 3.98 (393.86) | 4.40 (494.27) |
| Mass = 1800 kg | 2.64 (196.78) | 3.92 (297.13) | 4.57 (392.11) | 4.95 (492.75) |
| Mass = 2100 kg | 3.29 (199.38) | 4.46 (290.67) | 5.12 (394.26) | 5.47 (486.56) |
| Unit | dm3/100 km (km) | dm3/100 km (km) | dm3/100 km km | dm3/100 km (km) |
| Range Target | 200 km | 300 km | 400 km | 500 km |
|---|---|---|---|---|
| Mass = 1500 kg | 4.45 (200.20) | 5.60 (300.86) | 6.18 (394.15) | 6.53 (492.86) |
| Mass = 1800 kg | 4.86 (193.68) | 6.11 (299.62) | 6.64 (393.33) | 6.84 (459.34) |
| Mass = 2100 kg | 5.47 (200.19) | 6.60 (299.75) | 6.85 (343.32) | 6.85 (343.36) |
| Unit | dm3/100 km (km) | dm3/100 km (km) | dm3/100 km (km) | dm3/100 km (km) |
| Range Target | 200 km | 300 km | 400 km | 500 km |
|---|---|---|---|---|
| Mass = 1500 kg | 2.65 (203.63) | 3.71 (291.44) | 4.40 (402.86) | 4.74 (498.81) |
| Mass = 1800 kg | 3.11 (204.14) | 4.20 (297.12) | 4.79 (392.45) | 5.19 (504.31) |
| Mass = 2100 kg | 3.37 (193.00) | 4.68 (300.34) | 5.29 (406.00) | 5.60 (493.80) |
| Unit | dm3/100 km (km) | dm3/100 km (km) | dm3/100 km (km) | dm3/100 km (km) |
| Range Target | 200 km | 300 km | 400 km | 500 km |
|---|---|---|---|---|
| Mass = 1500 kg | 3.46 (205.38) | 4.54 (300.40) | 5.13 (404.28) | 5.45 (496.52) |
| Mass = 1800 kg | 3.94 (207.94) | 5.00 (305.13) | 5.54 (402.32) | 5.84 (491.38) |
| Mass = 2100 kg | 4.22 (198.68) | 5.38 (299.97) | 5.93 (398.45) | 6.25 (496.85) |
| Unit | dm3/100 km (km) | dm3/100 km (km) | dm3/100 km (km) | dm3/100 km (km) |
| Range Target | 200 km | 300 km | 400 km | 500 km |
|---|---|---|---|---|
| Mass = 1500 kg | 4.15 (196.53) | 5.30 (296.55) | 5.72 (366.85) | 5.72 (366.87) |
| Mass = 1800 kg | 4.57 (196.18) | 5.72 (297.34) | 5.72 (297.37) | 5.72 (297.39) |
| Mass = 2100 kg | 5.16 (205.21) | 5.72 (249.63) | 5.72 (249.66) | 5.72 (249.68) |
| Unit | dm3/100 km (km) | dm3/100 km (km) | dm3/100 km (km) | dm3/100 km (km) |
| Range Target | 200 km | 300 km | 400 km | 500 km |
|---|---|---|---|---|
| Mass = 1500 kg | 5.11 (198.90) | 5.25 (207.98) | 5.25 (207.98) | 5.25 (207.98) |
| Mass = 1800 kg | 5.25 (183.02) | 5.25 (183.02) | 5.25 (183.02) | 5.25 (183.02) |
| Mass = 2100 kg | 5.25 (163.28) | 5.25 (163.28) | 5.25 (163.28) | 5.25 (163.28) |
| Unit | dm3/100 km (km) | dm3/100 km (km) | dm3/100 km (km) | dm3/100 km (km) |
| Range Target | 200 km | 300 km | 400 km | 500 km |
|---|---|---|---|---|
| Mass = 1500 kg | 4.85 (143.69) | 4.85 (143.71) | 4.85 (143.72) | 4.85 (143.72) |
| Mass = 1800 kg | 4.86 (131.43) | 4.86 (131.44) | 4.86 (131.46) | 4.86 (131.47) |
| Mass = 2100 kg | 4.87 (121.03) | 4.87 (121.05) | 4.87 (121.06) | 4.87 (121.07) |
| Unit | dm3/100 km (km) | dm3/100 km (km) | dm3/100 km (km) | dm3/100 km (km) |
| Range Target | 200 km | 300 km | 400 km | 500 km |
|---|---|---|---|---|
| Mass = 1500 kg | 4.54 (110.20) | 4.54 (110.20) | 4.54 (110.20) | 4.54 (110.20) |
| Mass = 1800 kg | 4.55 (102.76) | 4.55 (102.76) | 4.55 (102.76) | 4.55 (102.76) |
| Mass = 2100 kg | 4.56 (96.24) | 4.56 (96.24) | 4.56 (96.24) | 4.56 (96.24) |
| Unit | dm3/100 km (km) | dm3/100 km (km) | dm3/100 km (km) | dm3/100 km (km) |
Appendix B






References
- Gössling, S.; Cohen, S.A.; Higham, J.E.S.; Peeters, P.M.; Eijgelaar, E. Desirable transport futures. Transp. Res. Part D Transp. Environ. 2018, 61, 301–309. [Google Scholar] [CrossRef]
- Duell, M.; Gardner, L.M.; Waller, S.T. Policy implications of incorporating distance constrained electric vehicles into the traffic network design problem. Transp. Lett. 2018, 10, 144–158. [Google Scholar] [CrossRef]
- Wilberforce, T.; El-Hassan, Z.; Khatib, F.N.; Al Makky, A.; Baroutaji, A.; Carton, J.G.; Olabi, A.G. Developments of electric cars and fuel cell hydrogen electric cars. Int. J. Hydogen Energy 2017, 42, 25695–25734. [Google Scholar] [CrossRef] [Green Version]
- Szumanowski, A.; Chang, Y.; Liu, Z.; Krawczyk, P. Hybrid powertrain efficiency improvement by using electromagnetically controlled double-clutch transmission. Int. J. Veh. Des. 2018, 76, 1–19. [Google Scholar] [CrossRef]
- Requia, W.J.; Mohamed, M.; Higgins, C.D.; Arain, A.; Ferguson, M. How clean are electric vehicles? Evidence-based review of the effects of electric mobility on air pollutants, greenhouse gas emissions and human health. Atmos. Environ. 2018, 185, 64–77. [Google Scholar] [CrossRef]
- Reiter, M.S.; Kockelman, K.M. Emissions and exposure costs of electric versus conventional vehicles: A case study in Texas. Int. J. Sustain. Transp. 2017, 11, 486–492. [Google Scholar] [CrossRef]
- Habib, S.; Khan, M.M.; Abbas, F.; Sang, L.; Shahid, M.U.; Tang, H. A comprehensive study of implemented international standards, technical challenges, impacts and prospects for electric vehicles. IEEE Access. 2018, 6, 13866–13890. [Google Scholar] [CrossRef]
- Chłopek, Z.; Lasocki, J.; Wójcik, P.; Badyda, A.J. Experimental investigation and comparison of energy consumption of electric and conventional vehicles due to the driving pattern. Int. J. Green Energy 2018, 15, 773–779. [Google Scholar] [CrossRef]
- Sutcu, M. Effects of total cost of ownership on automobile purchasing decisions. Transp. Lett. 2018, 12, 1–7. [Google Scholar] [CrossRef]
- Ehsani, M.; Gao, Y.; Longo, S.; Ebrahimi, K. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles; CRC Press: Boca Raton, FL, USA, 2018; ISBN 9781138330498. [Google Scholar]
- Kopczyński, A.; Piórkowski, P.; Roszczyk, P. Parameters selection of extended-range electric vehicle powered from supercapacitor pack based on laboratory and simulation tests. IOP Conf. Ser. Mater. Sci. Eng. 2018, 421, 022016. [Google Scholar] [CrossRef]
- Vatanparvar, K.; Faezi, S.; Burago, I.; Levorato, M.; Al Faruque, M.A. Extended range electric vehicle with driving behavior estimation in energy management. IEEE Trans. Smart Grid 2018, 10, 2959–2968. [Google Scholar] [CrossRef]
- Yao, M.; Zhu, B.; Zhang, N. Adaptive real-time optimal control for energy management strategy of extended range electric vehicle. Energy Convers. Manag. 2021, 234, 113874. [Google Scholar] [CrossRef]
- Kalia, A.V.; Fabien, B.C. On Implementing Optimal Energy Management for EREV Using Distance Constrained Adaptive Real-Time Dynamic Programming. Electronics 2020, 9, 228. [Google Scholar] [CrossRef] [Green Version]
- Zhu, D.; Pritchard, E.; Dadam, S.R.; Kumar, V.; Xu, Y. Optimization of rule-based energy management strategies for hybrid vehicles using dynamic programming. Combust. Engines 2021, 184, 3–10. [Google Scholar] [CrossRef]
- Xiao, B.; Ruan, J.; Yang, W.; Walker, P.D.; Zhang, N. A review of pivotal energy management strategies for extended range electric vehicles. Renew. Sustain. Energy Rev. 2021, 149, 111194. [Google Scholar] [CrossRef]
- Basma, H.; Mansour, C.; Halaby, H.; Baz Radwan, A. Methodology to Design an Optimal Rule-Based Energy Management Strategy Using Energetic Macroscopic Representation: Case of Plug-In Series Hybrid Electric Vehicle. Adv. Automob. Eng. 2018, 7, 188. [Google Scholar] [CrossRef]
- Salmasi, F.R. Control strategies for hybrid electric vehicles: Evolution, classification, comparison, and future trends. IEEE Trans. Veh. Technol. 2007, 56, 2393–2404. [Google Scholar] [CrossRef]
- Hou, C.; Ouyang, M.; Xu, L.; Wang, H. Approximate Pontryagin’s minimum principle applied to the energy management of plug-in hybrid electric vehicles. Appl. Energy 2014, 115, 174–189. [Google Scholar] [CrossRef]
- Huang, Y.; Wang, H.; Khajepour, A.; Li, B.; Ji, J.; Zhao, K.; Hu, C. A review of power management strategies and component sizing methods for hybrid vehicles. Renew. Sustain. Energy Rev. 2018, 96, 132–144. [Google Scholar] [CrossRef]
- Huang, Y.; Wang, H.; Khajepour, A.; He, H.; Ji, J. Model predictive control power management strategies for HEVs: A review. J. Power Sources 2017, 341, 91–106. [Google Scholar] [CrossRef]
- Xing, Y.; Ma, E.W.M.; Tsui, K.L.; Pecht, M. Battery management systems in electric and hybrid vehicles. Energies 2011, 4, 1840–1857. [Google Scholar] [CrossRef]
- Peng, J.; He, H.; Xiong, R. Rule based energy management strategy for a series-parallel plug-in hybrid electric bus optimized by dynamic programming. Appl. Energy 2017, 185, 1633–1643. [Google Scholar] [CrossRef]
- Geng, B.; Mills, J.K.; Sun, D. Energy management control of mictroturbine-powered plug-in hybrid electric vehicles using the telemetry equivalent consumption minimization strategy. IEEE Trans. Veh. Technol. 2011, 60, 4238–4248. [Google Scholar] [CrossRef]
- Lü, X.; Wu, Y.; Lian, J.; Zhang, Y.; Chen, C.; Wang, P.; Meng, L. Energy management of hybrid electric vehicles: A review of energy optimization of fuel cell hybrid power system based on genetic algorithm. Energy Convers. Manag. 2020, 205, 112474. [Google Scholar] [CrossRef]
- Zhou, X.; Qin, D.; Hu, J. Multi-objective optimization design and performance evaluation for plug-in hybrid electric vehicle power-trains. Appl. Energy 2017, 208, 1608–1625. [Google Scholar] [CrossRef]
- Hu, Z.; Li, J.; Xu, L.; Song, Z.; Fang, C.; Ouyang, M.; Dou, G.; Kou, G. Multi-objective energy management optimization and parameter sizing for proton exchange membrane hybrid fuel cell vehicles. Energy Convers. Manag. 2016, 129, 108–121. [Google Scholar] [CrossRef]
- Bou Nader, W.S.; Mansour, C.J.; Nemer, M.G. Optimization of a Brayton external combustion gas-turbine system for extended range electric vehicles. Energy 2018, 150, 745–758. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, Z.; Chen, Y.; Xia, A.; Guo, C.; Tang, Z. Research on energy optimization control strategy of the hybrid electric vehicle based on Pontryagin’s minimum principle. Comput. Electr. Eng. 2018, 72, 203–213. [Google Scholar] [CrossRef]
- Solouk, A.; Tripp, J.; Shakiba-Herfeh, M.; Shahbakhti, M. Fuel consumption assessment of a multi-mode low temperature combustion engine as range extender for an electric vehicle. Energy Convers. Manag. 2017, 148, 1478–1496. [Google Scholar] [CrossRef]
- Zhang, F.; Wang, L.; Coskun, S.; Pang, H.; Cui, Y.; Xi, J. Energy management strategies for hybrid electric vehicles: Review, classification, comparison, and outlook. Energies 2020, 13, 3352. [Google Scholar] [CrossRef]
- Guo, H.; Wang, X.; Li, L. State-of-charge-constraint-based energy management strategy of plug-in hybrid electric vehicle with bus route. Energy Convers. Manag. 2019, 199, 111972. [Google Scholar] [CrossRef]
- Park, J.; Park, J.H. Development of equivalent fuel consumption minimization strategy for hybrid electric vehicles. Int. J. Automot. Technol. 2012, 13, 835–843. [Google Scholar] [CrossRef]
- Du, J.; Chen, J.; Song, Z.; Gao, M.; Ouyang, M. Design method of a power management strategy for variable battery capacities range-extended electric vehicles to improve energy efficiency and cost-effectiveness. Energy 2017, 121, 32–42. [Google Scholar] [CrossRef]
- Zhang, X.; Wu, Z.; Hu, X.; Qian, W.; Li, Z. Trajectory optimization-based auxiliary power unit control strategy for an extended range electric vehicle. IEEE Trans. Veh. Technol. 2017, 66, 10866–10874. [Google Scholar] [CrossRef]
- Chen, B.-C.; Wu, Y.-Y.; Tsai, H.-C. Design and analysis of power management strategy for range extended electric vehicle using dynamic programming. Appl. Energy 2014, 113, 1764–1774. [Google Scholar] [CrossRef]
- Wang, H.; Huang, Y.; Khajepour, A.; Soltani, A.; Cao, D. Cyber-physical predictive energy management for through-the-road hybrid vehicles. IEEE Trans. Veh. Technol. 2019, 68, 3246–3256. [Google Scholar] [CrossRef]
- Li, J.; Wang, Y.; Chen, J.; Zhang, X. Study on energy management strategy and dynamic modeling for auxiliary power units in range-extended electric vehicles. Appl. Energy 2017, 194, 363–375. [Google Scholar] [CrossRef]
- Rogge, M.; Rothgang, S.; Sauer, D.U. Operating Strategies for a Range Extender Used in Battery Electric Vehicles. In Proceedings of the 2013 IEEE Vehicle Power and Propulsion Conference (VPPC), Beijing, China, 15–18 October 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Fiengo, G.; Glielmo, L.; Vasca, F. Control of auxiliary power unit for hybrid electric vehicles. IEEE Trans. Control Syst. Technol. 2007, 15, 1122–1130. [Google Scholar] [CrossRef]
- Lee, G.-S.; Kim, D.-H.; Han, J.-H.; Hwang, M.-H.; Cha, H.-R. Optimal operating point determination method design for range-extended electric vehicles based on real driving tests. Energies 2019, 12, 845. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Wang, C.; Zhao, X.; Guo, C. An adaptive-equivalent consumption minimum strategy for an extended-range electric bus based on target driving cycle generation. Energies 2018, 11, 1805. [Google Scholar] [CrossRef] [Green Version]
- Xi, L.; Zhang, X.; Sun, C.; Wang, Z.; Hou, X.; Zhang, J. Intelligent energy management control for extended range electric vehicles based on dynamic programming and neural network. Energies 2017, 10, 1871. [Google Scholar] [CrossRef] [Green Version]
- Di Cairano, S.; Bernardini, D.; Bemporad, A.; Kolmanovsky, I.V. Stochastic MPC with learning for driver-predictive vehicle control and its application to HEV energy management. IEEE Trans. Control Syst. Technol. 2014, 22, 1018–1031. [Google Scholar] [CrossRef]
- EPA Federal Test Procedure (FTP). Available online: https://www.epa.gov/emission-standards-reference-guide/epa-federal-test-procedure-ftp (accessed on 1 April 2022).
- UN Regulation No. 154-Worldwide Harmonized Light Vehicles Test Procedure (WLTP). Available online: https://unece.org/transport/documents/2021/02/standards/un-regulation-no-154-worldwide-harmonized-light-vehicles-test (accessed on 1 April 2022).
- Liu, Y.; Wu, Z.X.; Zhou, H.; Zheng, H.; Yu, N.; An, X.P.; Li, J.Y.; Li, M.L. Development of China Light-Duty Vehicle Test Cycle. Int. J. Automot. Technol. 2020, 21, 1233–1246. [Google Scholar] [CrossRef]
- Lasocki, J.; Kopczyński, A.; Krawczyk, P.; Roszczyk, P. Empirical Study on the Efficiency of an LPG-Supplied Range Extender for Electric Vehicles. Energies 2019, 12, 3528. [Google Scholar] [CrossRef] [Green Version]
- Kazmierkowski, M.P.; Krishnan, R.; Blaabjerg, F. Control in Power Electronics-Selected Problems; Academic Press: Cambridge, MA, USA, 2003; ISBN 9780124027725. [Google Scholar]
- Szumanowski, A. Hybrid Electric Power Train Engineering and Technology: Modeling, Control, and Simulation; IGI Global: Hershey, PA, USA, 2013; ISBN 9781466640429. [Google Scholar]
- Kopczyński, A.; Liu, Z.; Krawczyk, P. Parametric analysis of Li-ion battery based on laboratory tests. E3S Web Conf. 2018, 44, 00074. [Google Scholar] [CrossRef]
- Chłopek, Z.; Biedrzycki, J.; Lasocki, J.; Wojcik, P. Assessment of the impact of dynamic states of an internal combustion engine on its operational properties. Eksploatacja i Niezawodność 2015, 17, 35–41. [Google Scholar] [CrossRef]
- Kopczyński, A.; Krawczyk, P.; Lasocki, J. Parameters selection of extended-range electric vehicle supplied with alternative fuel. E3S Web Conf. 2018, 44, 9. [Google Scholar] [CrossRef] [Green Version]
- Gaines, L.; Rask, E.; Keller, G. Which is Greener: Idle, or Stop and Restart? Comparing Fuel Use and Emissions for Short Passenger-Car Stops. Transp. Rev. Board Annu. Meet. Proc. 2012. Available online: https://anl.app.box.com/s/q13vvdjic1jbz6lqa7m9u1nthfq5u0n9 (accessed on 30 March 2022).
- Ellis, G. Control System Design Guide, 4th ed.; Butterworth-Heinemann: Oxford, UK, 2012; ISBN 9780128102411. [Google Scholar]
- Greenhouse Gas Emission Intensity of Electricity Generation by Country. Available online: https://www.eea.europa.eu/data-and-maps/daviz/co2-emission-intensity-9/#tab-googlechartid_googlechartid_googlechartid_chart_1111 (accessed on 30 March 2022).
- Emission Factors for Greenhouse Gas Inventories. Available online: https://www.epa.gov/sites/default/files/2021-04/documents/emission-factors_apr2021.pdf (accessed on 30 March 2022).







| Case | Motor Power Pm | Battery Power Pb | REX Power Pg |
|---|---|---|---|
| EV only—driving | Pm < 0 | Pb > 0 | Pg = 0 |
| EV only—braking | Pm > 0 | Pb < 0 | Pg = 0 |
| REX turned on—driving, −Pm > ηcgηcmPg | Pm < 0 | Pb > 0 | Pg > 0 |
| REX turned on—driving, −Pm < ηcgηcmPg | Pm < 0 | Pb < 0 | Pg > 0 |
| REX turned on—braking | Pm > 0 | Pb < 0 | Pg > 0 |
| Control Type | KP0 | T0 | KP | KI |
|---|---|---|---|---|
| PI | 5 | 209.5 s | 2.25 | 0.01289 |
| Parameter | Total Mass | Frontal Drag Coefficient | Frontal Area | Gear Ratios | Drivetrain Efficiency |
|---|---|---|---|---|---|
| Value | 1500/1800/2100 | 0.29 | 2.47 | 13.2/6.6 | 94 |
| Unit | kg | - | m2 | - | % |
| Parameter | Single Wheel Inertia | Tire Rolling Resistance Coefficient | Tire Dynamic Radius |
|---|---|---|---|
| Value | 0.752 | 0.012 | 0.307 |
| Unit | kg·m2 | - | m |
| Parameter | Rated Power | Rated Speed | Rated Torque | Supply Voltage | Rated Current | Rotor Inertia | Rated Efficiency |
|---|---|---|---|---|---|---|---|
| Value | 54 | 8000 | 79 | 320 | 166 | 0.064 | 96 |
| Unit | kW | rpm | Nm | V | A (rms) | kg·m2 | % |
| Parameter | Stored Energy | SOC Range | Used Energy | Voltage | Rated Discharge Current | Charging Efficiency (Plug-In) |
|---|---|---|---|---|---|---|
| Value | 23.8 | 0.9–0.15 | 17.9 | 410 | 116 | 0.9 |
| Unit | kWh | - | kWh | V | A | - |
| Parameter | Output Power | Rotation Speed | Engine Torque | BSFC (Gasoline) |
|---|---|---|---|---|
| Value | 16.6 | 2400 | 66 | 283.3 |
| Unit | kW | rpm | Nm | g/kWh |
| Cycle | WLTC 3b | FTP-75 | CLTC-P |
|---|---|---|---|
| Value | 0.17 | 0.12 | 0.10 |
| Unit | km/h | km/h | km/h |
| Cycle | WLTC 3b | FTP-75 | CLTC-P |
|---|---|---|---|
| Mass = 1500 kg | 121.74 | 147.70 | 142.37 |
| Mass = 1800 kg | 111.1 | 134.27 | 128.27 |
| Mass = 2100 kg | 103.86 | 121.69 | 117.97 |
| Unit | km | km | km |
| Cycle | WLTC 3b High 3-2 | CLTC-P Phase 3 | WLTC 3b Extra-H. 3 |
|---|---|---|---|
| Mass = 1500 kg | 134.34 | 126.64 | 88.28 |
| Mass = 1800 kg | 123.71 | 114.67 | 83.62 |
| Mass = 2100 kg | 114.43 | 105.97 | 78.14 |
| Unit | km | km | km |
| Speed | 90 km/h | 100 km/h | 110 km/h | 120 km/h | 130 km/h | 140 km/h |
|---|---|---|---|---|---|---|
| Mass = 1500 kg | 115.99 | 102.19 | 90.11 | 79.51 | 70.33 | 62.81 |
| Mass = 1800 kg | 107.81 | 95.69 | 84.92 | 75.35 | 67.06 | 60.16 |
| Mass = 2100 kg | 100.67 | 89.93 | 80.27 | 71.58 | 64.06 | 57.71 |
| Unit | km | km | km | km | km | km |
| Speed | 0–50 km/h | 0–100 km/h |
|---|---|---|
| Mass = 1500 kg | 4.6 | 23.5 |
| Mass = 1800 kg | 5.6 | 29.2 |
| Mass = 2100 kg | 6.7 | 35.4 |
| Unit | s | s |
| Range Target | 200 km | 300 km | 400 km | 500 km |
|---|---|---|---|---|
| WLTC 3b | 201.39 (0.67) | 298.47 (−0.51) | 391.10 (−2.23) | 486.06 (−2.79) |
| FTP-75 | 203.60 (1.80) | 290.99 (−3.00) | 387.76 (−3.06) | 493.40 (−1.32) |
| CLTC-P | 203.77 (1.88) | 290.67 (−3.11) | 396.06 (−0.99) | 490.21 (−1.96) |
| WLTC 3b High 3-2 | 203.34 (1.67) | 298.60 (−0.47) | 393.62 (−1.59) | 493.87 (−1.23) |
| CLTC-P Phase 3 | 201.05 (0.52) | 291.58 (−2.81) | 393.86 (−1.53) | 494.27 (−1.15) |
| WLTC 3b Extra-H. 3 | 200.20 (0.10) | 300.86 (0.29) | 394.15 (−1.46) | 492.86 (−1.43) |
| 90 km/h | 203.63 (1.81) | 291.44 (−2.85) | 402.86 (0.71) | 498.81 (−0.24) |
| 100 km/h | 205.38 (2.69) | 300.40 (0.13) | 404.28 (1.07) | 496.52 (−0.70) |
| 110 km/h | 196.53 (−1.74) | 296.55 (−1.15) | 366.85 (−8.29) | 366.87 (−26.63) |
| 120 km/h | 198.90 (−0.55) | 207.98 (−30.67) | 207.98 (−48.01) | 207.98 (−58.40) |
| 130 km/h | 143.69 (−28.15) | 143.71 (−52.10) | 143.72 (−64.07) | 143.72 (−71.26) |
| 140 km/h | 110.20 (−44.90) | 110.20 (−63.27) | 110.20 (−72.45) | 110.20 (−77.96) |
| Unit | km (%) | km (%) | km (%) | km (%) |
| Range Target | 200 km | 300 km | 400 km | 500 km |
|---|---|---|---|---|
| WLTC 3b | 244 (11) | 225 (27) | 329 (28) | 348 (36) |
| FTP-75 | 194 (8) | 236 (17) | 198 (34) | 173 (56) |
| CLTC-P | 260 (7) | 209 (21) | 266 (28) | 213 (48) |
| Unit | s (-) | s (-) | s (-) | s (-) |
| Range Target | 200 km | 300 km | 400 km | 500 km |
|---|---|---|---|---|
| WLTC 3b | 16.84 | 26.07 | 30.25 | 33.25 |
| FTP-75 | 7.23 | 13.05 | 16.39 | 18.54 |
| CLTC-P | 7.13 | 12.04 | 15.00 | 16.73 |
| WLTC 3b High 3-2 | 16.19 | 26.37 | 31.47 | 34.85 |
| CLTC-P Phase 3 | 17.18 | 25.94 | 31.16 | 34.34 |
| WLTC 3b Extra-H. 3 | 63.64 | 79.90 | 88.56 | 93.79 |
| 90 km/h | 37.19 | 52.04 | 61.57 | 66.36 |
| 100 km/h | 54.09 | 71.06 | 80.49 | 85.56 |
| 110 km/h | 71.70 | 92.22 | 99.96 | 99.96 |
| 120 km/h | 97.09 | 99.91 | 99.91 | 99.91 |
| 130 km/h | 99.85 | 99.86 | 99.87 | 99.87 |
| 140 km/h | 99.80 | 99.79 | 99.80 | 99.80 |
| Unit | % | % | % | % |
| Range Target | 200 km | 300 km | 400 km | 500 km |
|---|---|---|---|---|
| Mass = 1500 kg | 2.38 (201.39) | 3.64 (298.47) | 4.19 (391.10) | 4.58 (486.06) |
| Mass = 1800 kg | 3.02 (204.02) | 4.19 (305.23) | 4.69 (388.20) | 5.08 (484.25) |
| Mass = 2100 kg | 3.34 (195.75) | 4.55 (291.87) | 5.11 (368.06) | 5.51 (461.17) |
| Unit | dm3/100 km (km) | dm3/100 km (km) | dm3/100 km (km) | dm3/100 km (km) |
| Range Target | 200 km | 300 km | 400 km | 500 km |
|---|---|---|---|---|
| Mass = 1500 kg | 1.37 (203.60) | 2.47 (290.99) | 3.12 (387.76) | 3.55 (493.40) |
| Mass = 1800 kg | 1.78 (196.88) | 3.01 (292.71) | 3.71 (400.90) | 4.07 (494.80) |
| Mass = 2100 kg | 2.36 (200.18) | 3.59 (298.09) | 4.19 (388.09) | 4.59 (493.18) |
| Unit | dm3/100 km (km) | dm3/100 km (km) | dm3/100 km (km) | dm3/100 km (km) |
| Range Target | 200 km | 300 km | 400 km | 500 km |
|---|---|---|---|---|
| Mass = 1500 kg | 1.59 (203.77) | 2.71 (290.67) | 3.35 (396.06) | 3.74 (490.21) |
| Mass = 1800 kg | 1.99 (197.66) | 3.24 (291.82) | 3.91 (400.80) | 4.21 (475.46) |
| Mass = 2100 kg | 2.54 (198.01) | 3.77 (296.35) | 4.42 (399.99) | 4.79 (489.46) |
| Unit | dm3/100 km (km) | dm3/100 km (km) | dm3/100 km (km) | dm3/100 km (km) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krawczyk, P.; Kopczyński, A.; Lasocki, J. Modeling and Simulation of Extended-Range Electric Vehicle with Control Strategy to Assess Fuel Consumption and CO2 Emission for the Expected Driving Range. Energies 2022, 15, 4187. https://doi.org/10.3390/en15124187
Krawczyk P, Kopczyński A, Lasocki J. Modeling and Simulation of Extended-Range Electric Vehicle with Control Strategy to Assess Fuel Consumption and CO2 Emission for the Expected Driving Range. Energies. 2022; 15(12):4187. https://doi.org/10.3390/en15124187
Chicago/Turabian StyleKrawczyk, Paweł, Artur Kopczyński, and Jakub Lasocki. 2022. "Modeling and Simulation of Extended-Range Electric Vehicle with Control Strategy to Assess Fuel Consumption and CO2 Emission for the Expected Driving Range" Energies 15, no. 12: 4187. https://doi.org/10.3390/en15124187
APA StyleKrawczyk, P., Kopczyński, A., & Lasocki, J. (2022). Modeling and Simulation of Extended-Range Electric Vehicle with Control Strategy to Assess Fuel Consumption and CO2 Emission for the Expected Driving Range. Energies, 15(12), 4187. https://doi.org/10.3390/en15124187