
Influence of a New Type of Two-Speed Planetary Gear Automatic Transmission on the Performance of Battery Electric Vehicles


Abstract
:1. Introduction
2. Materials and Methods
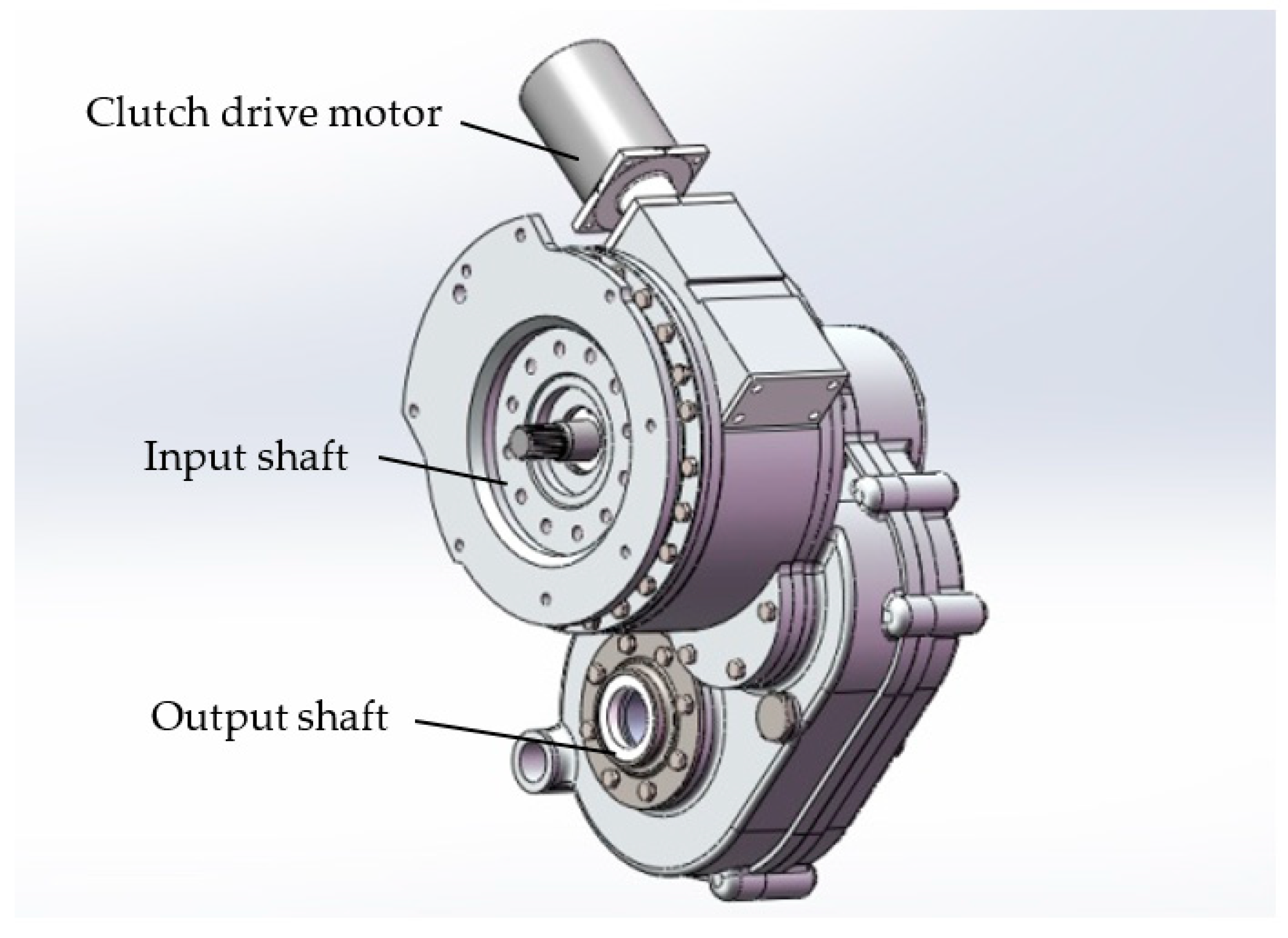
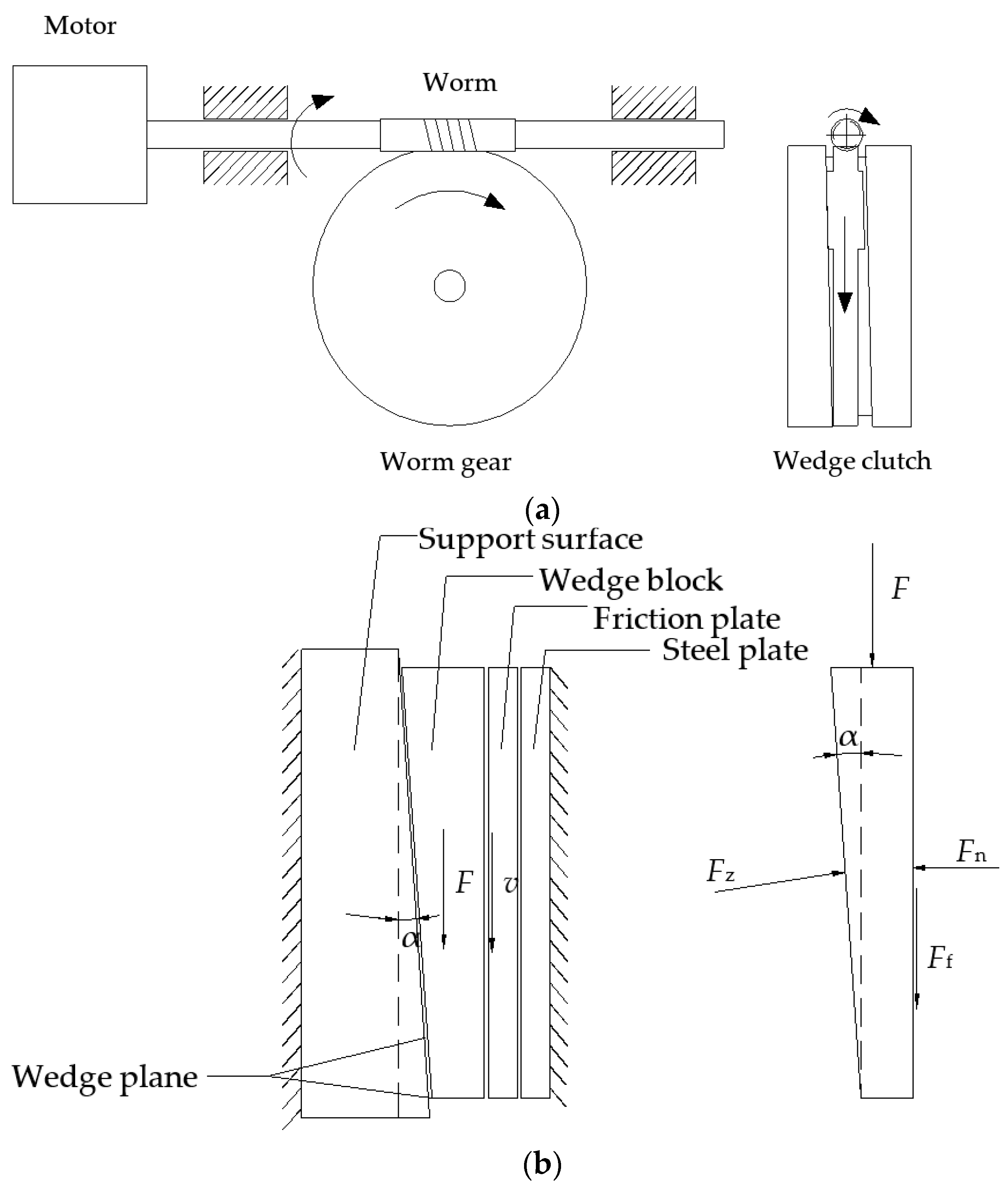
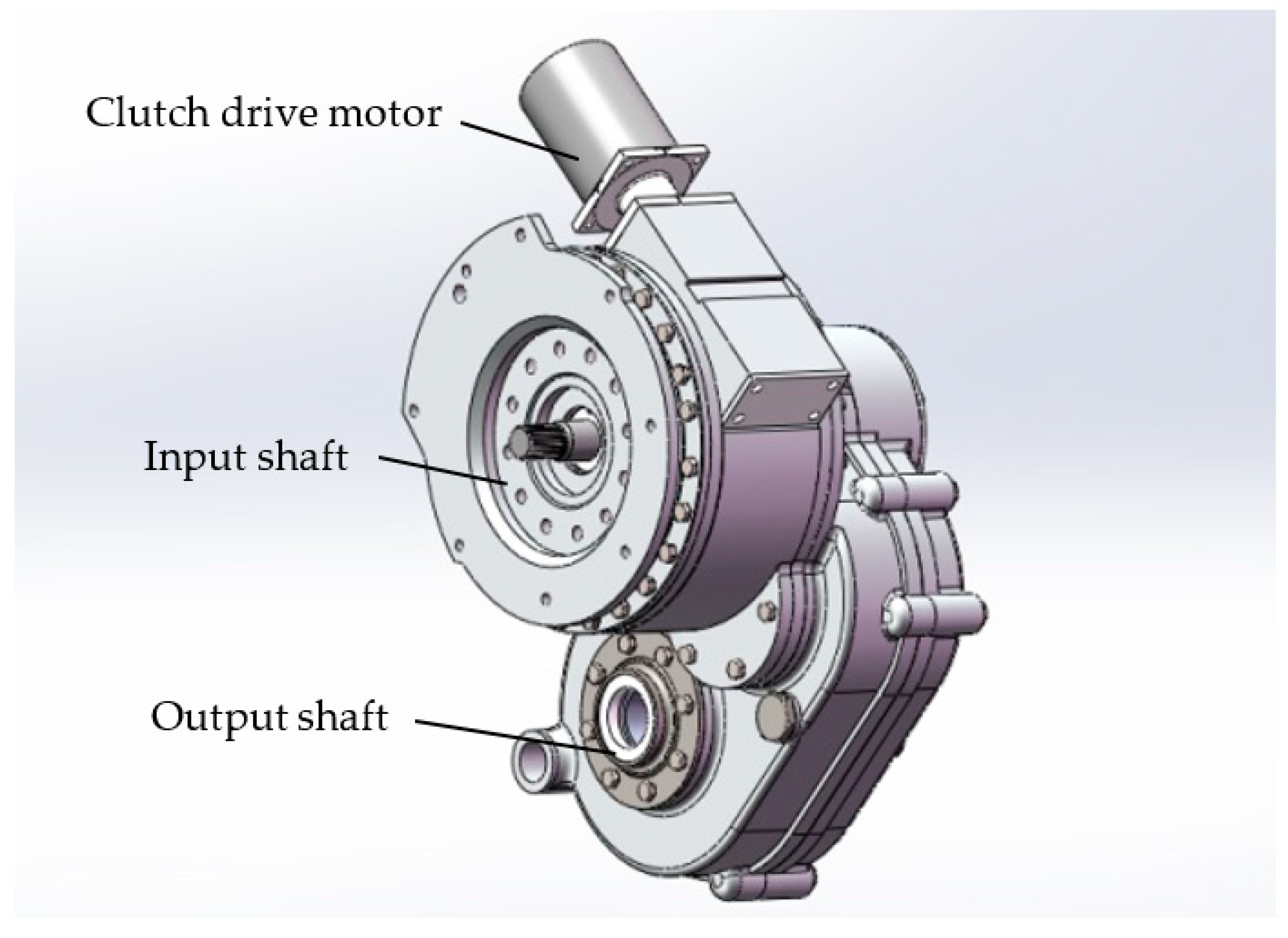
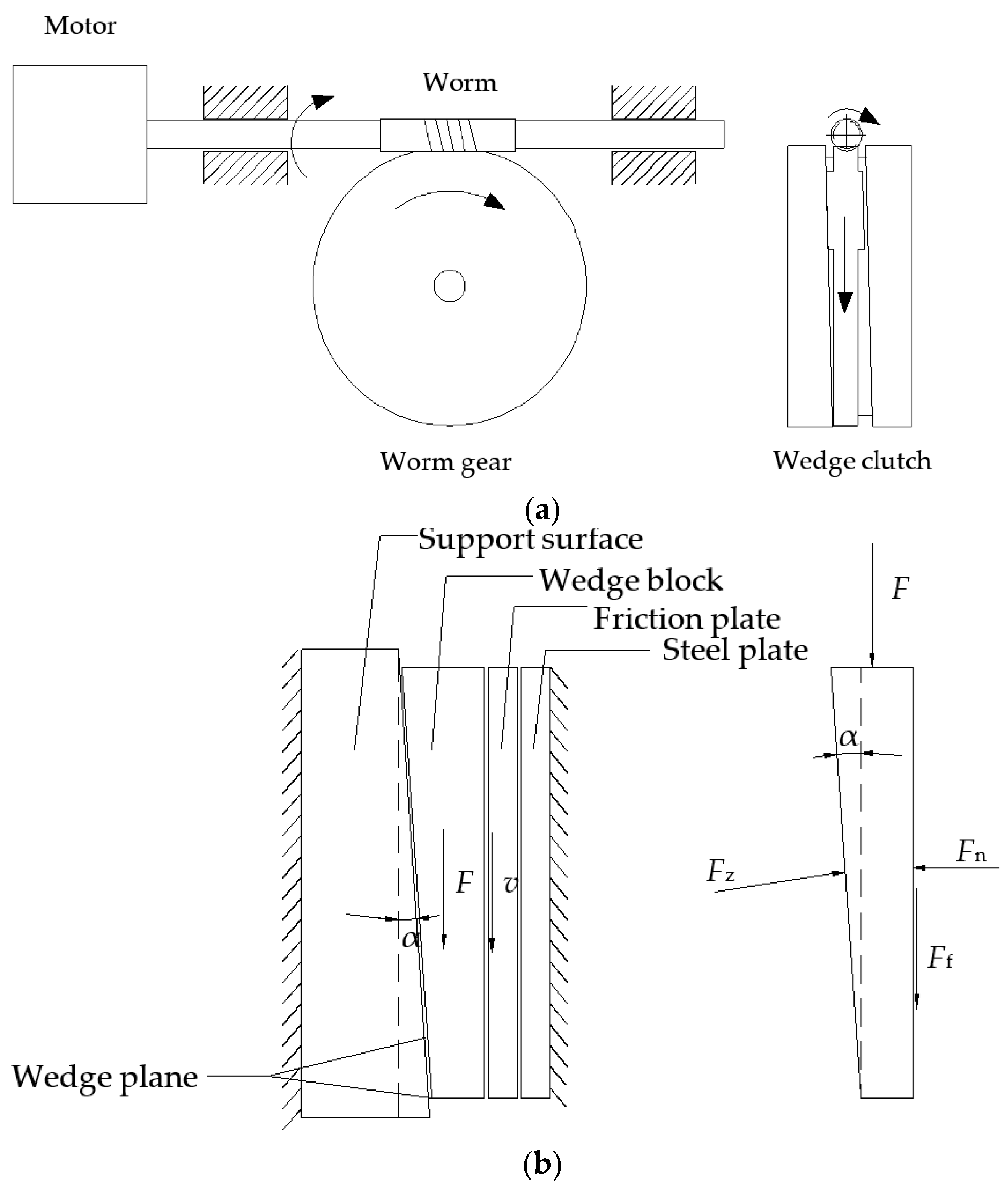
2.1. Structure and Working Principle
2.2. Transmission Ratio and Efficiency
2.2.1. Gear Ratio Calculation
2.2.2. Transmission Efficiency Calculation
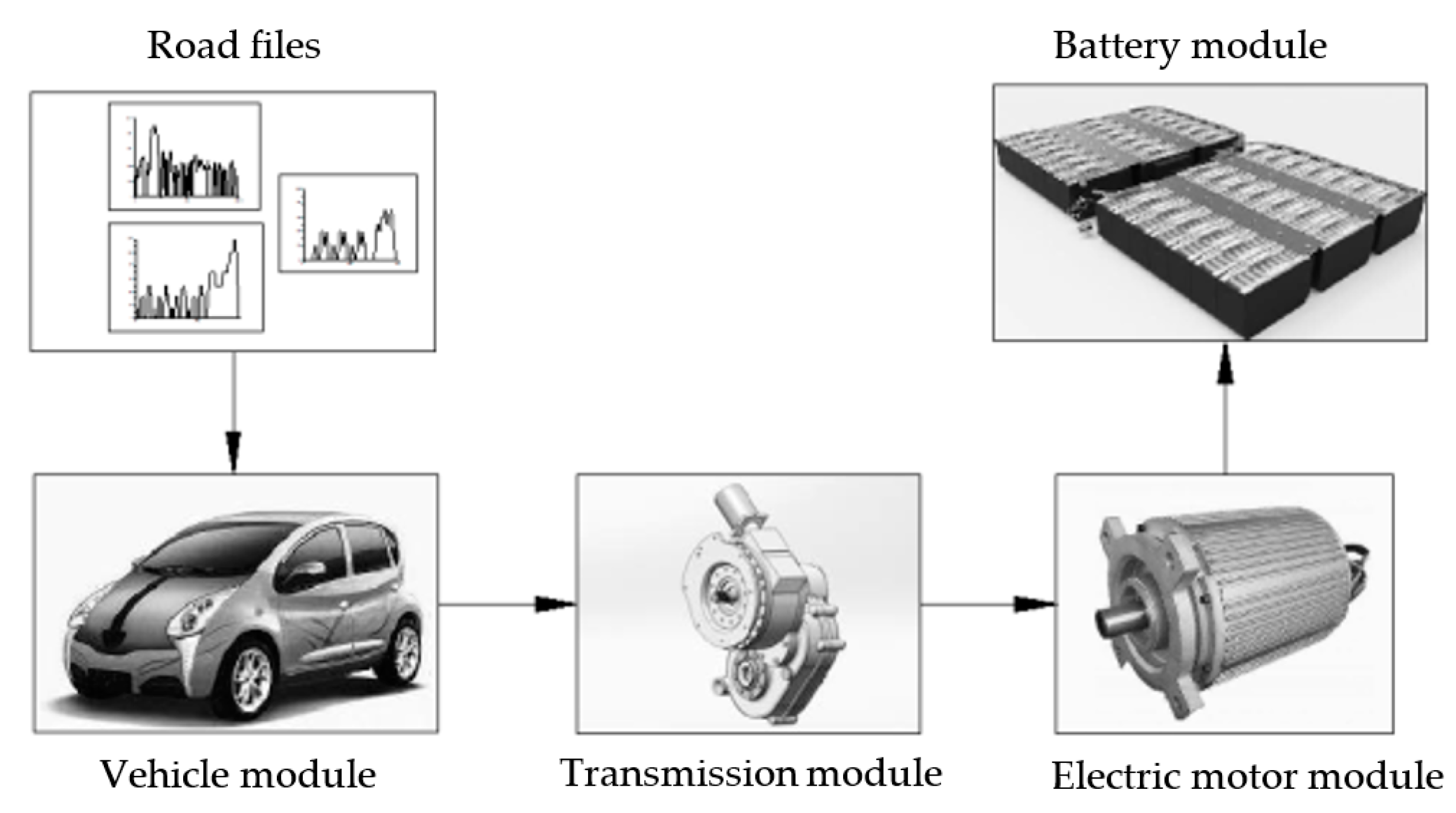
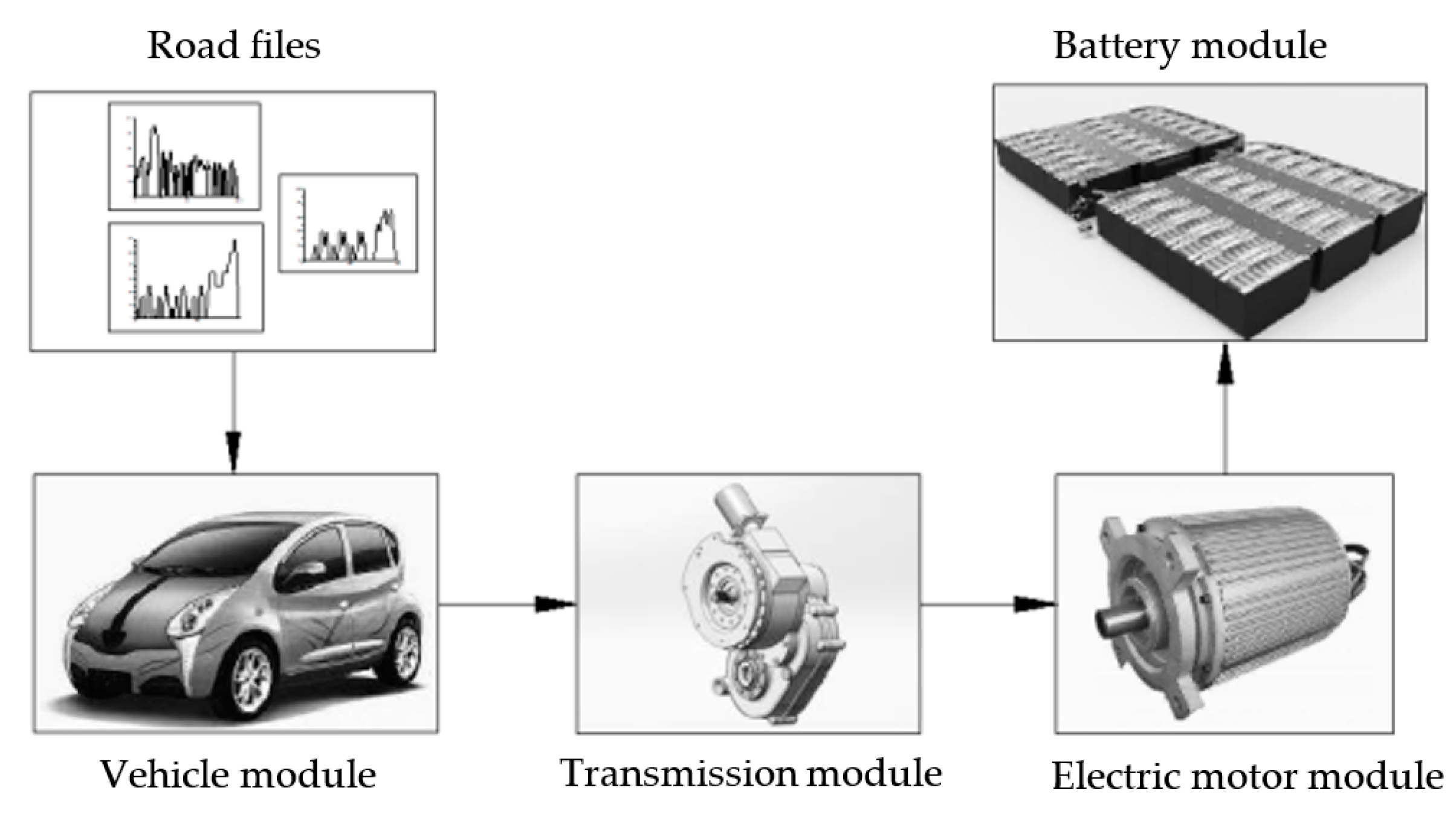
3. Vehicle Parameters and Drive Train Model
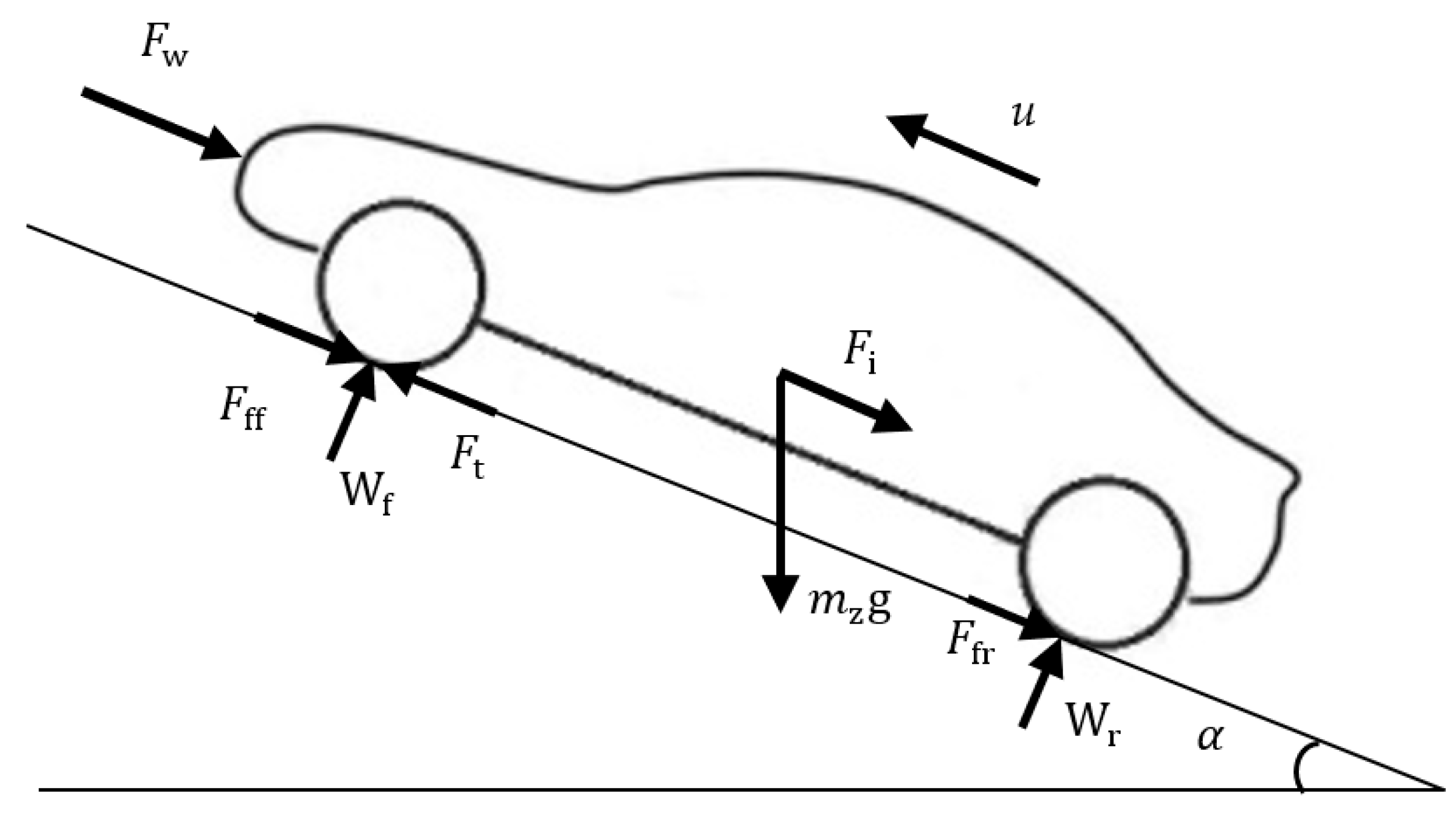
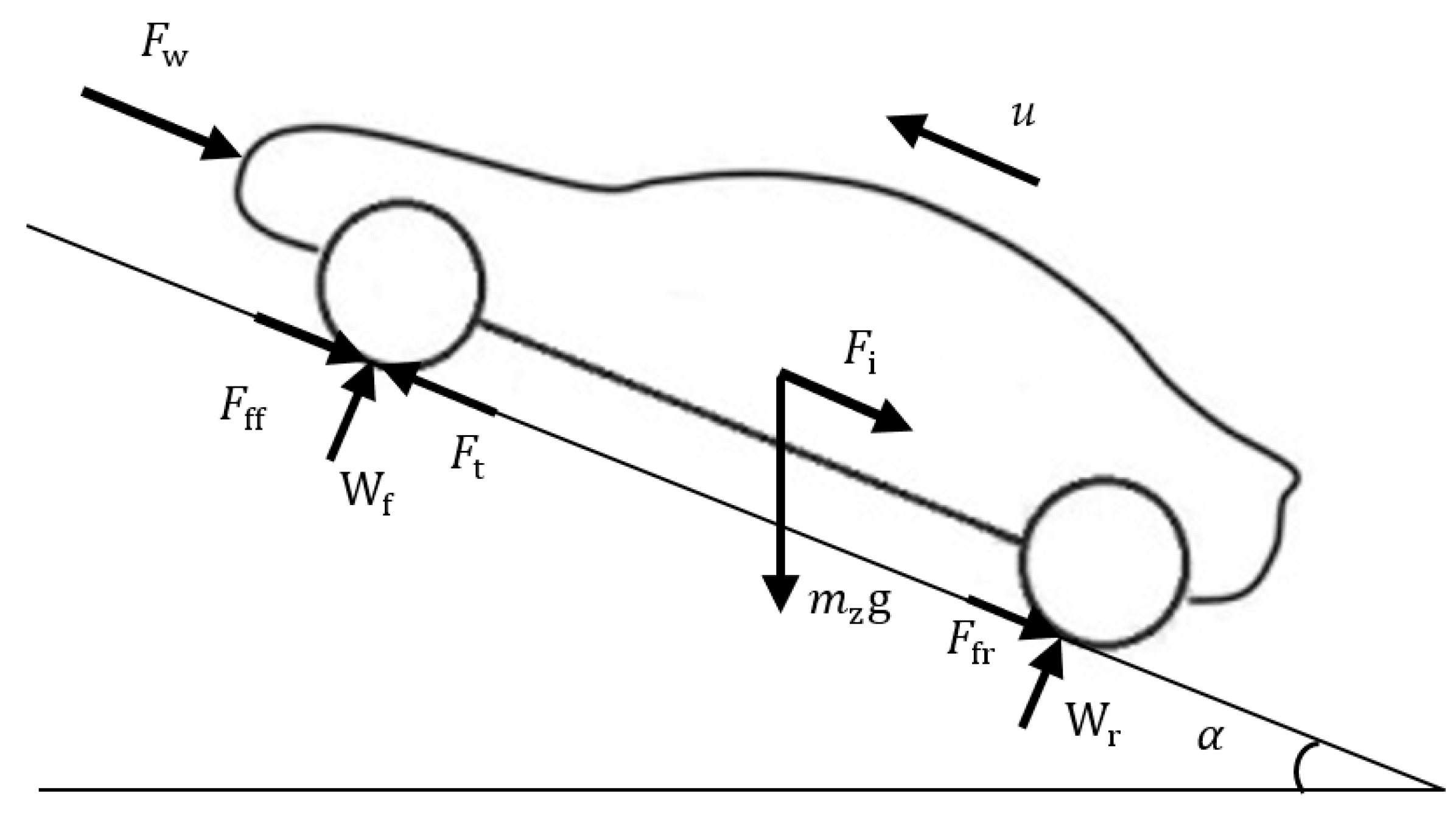
3.1. Vehicle Module
3.2. Drive Train Module
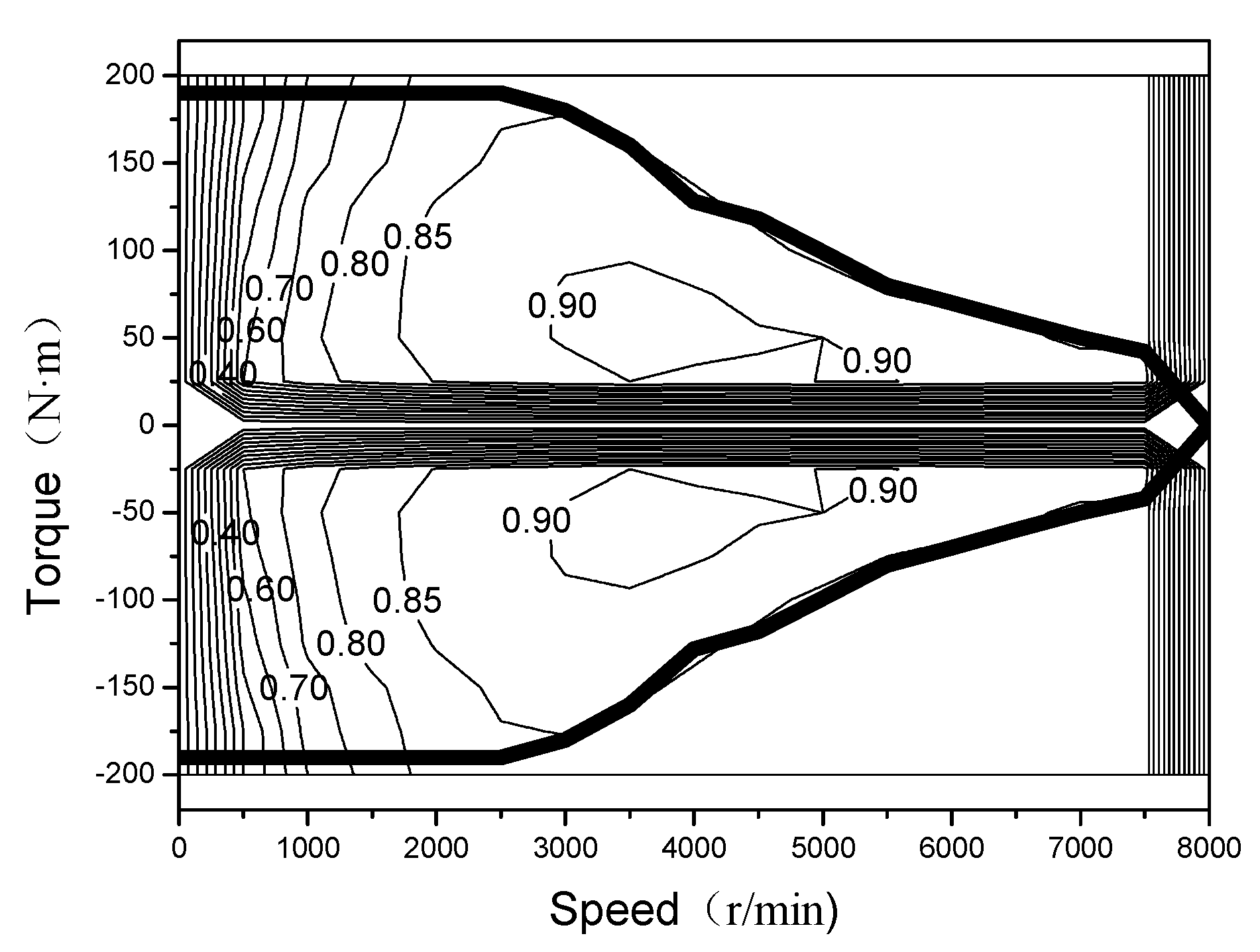
3.3. Drive Motor Module
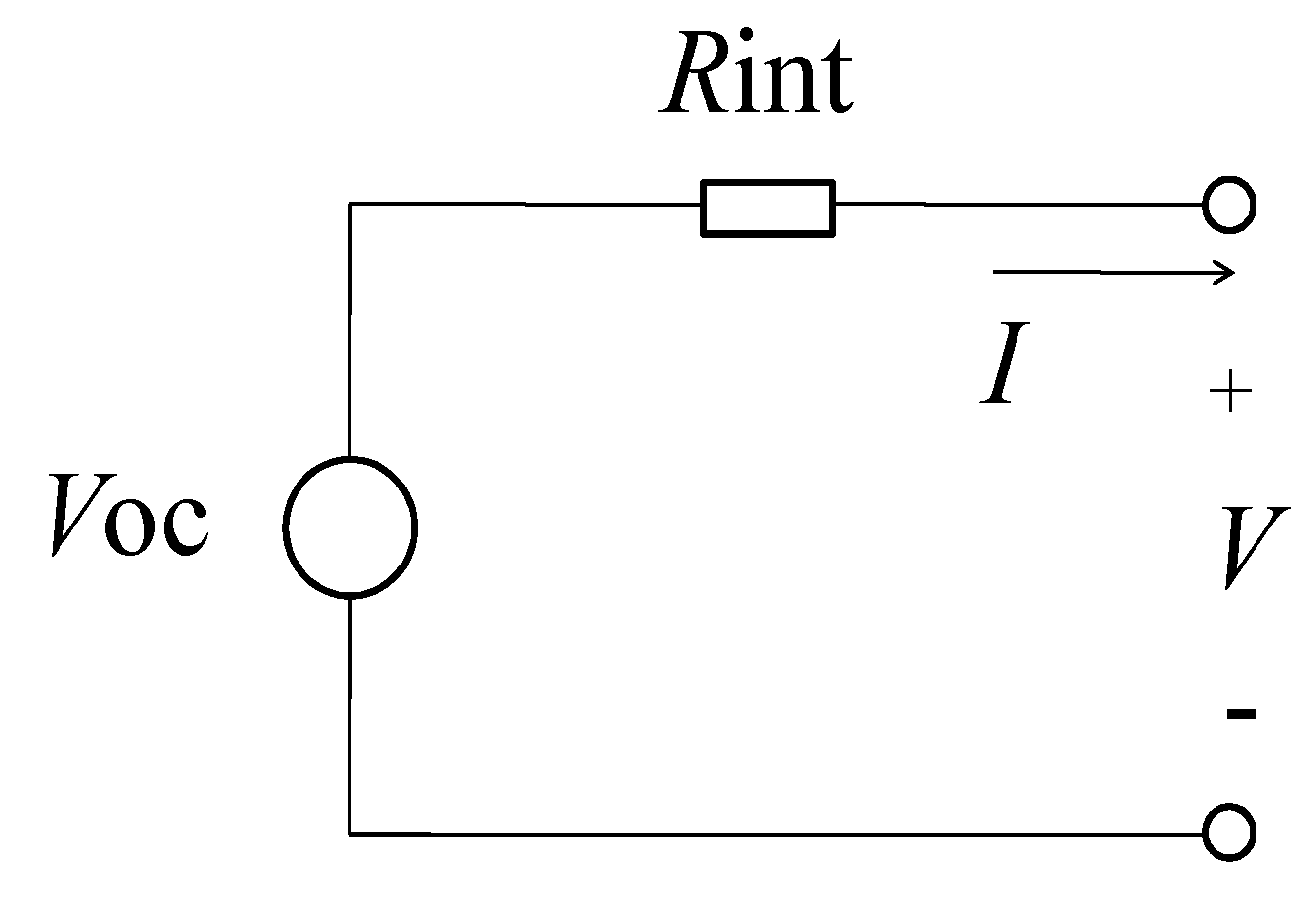
3.4. Battery Module
4. Transmission Ratio and Shift Schedule Optimization
4.1. Dynamic Programming Algorithm
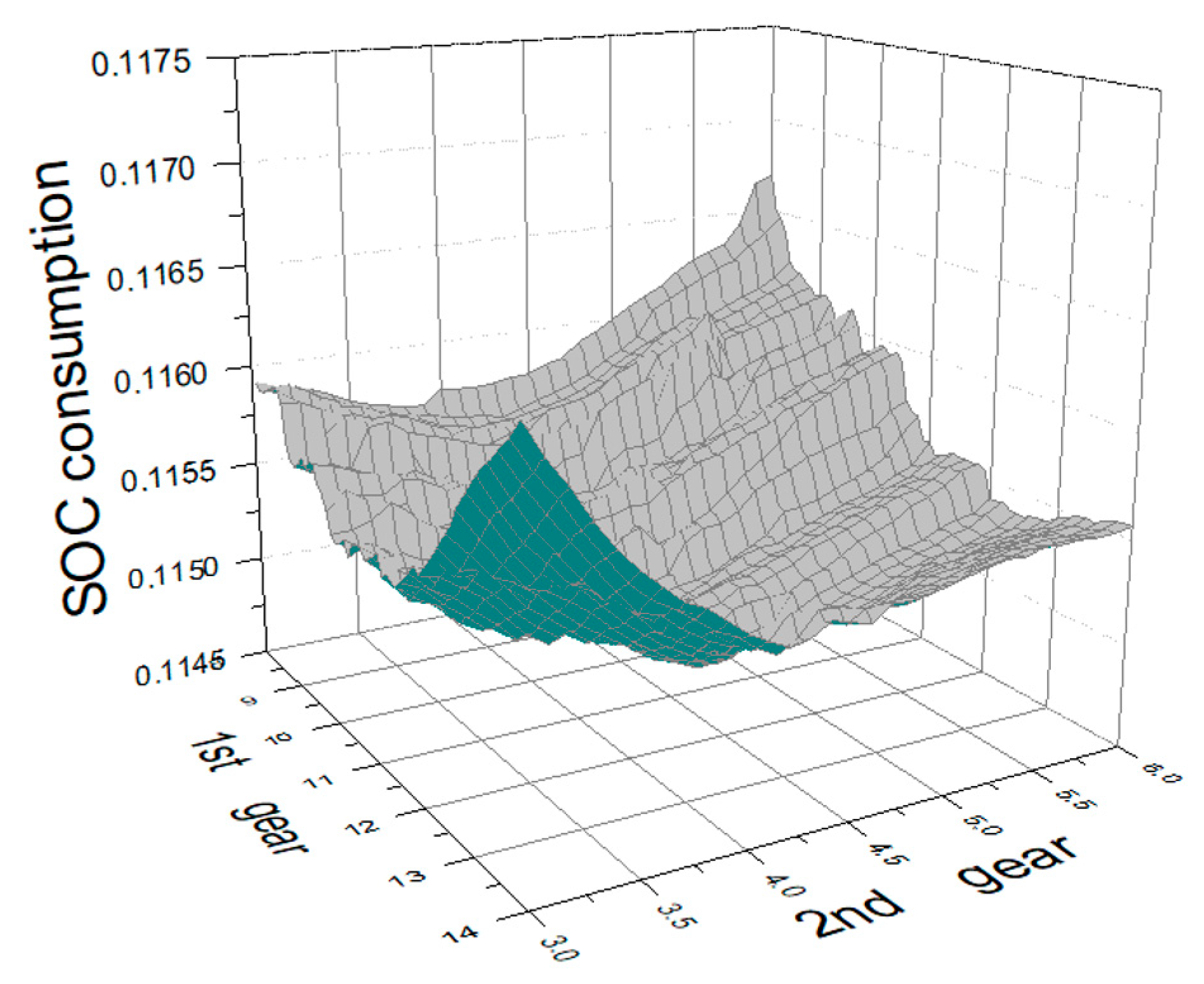
4.2. Transmission Ratio Optimization
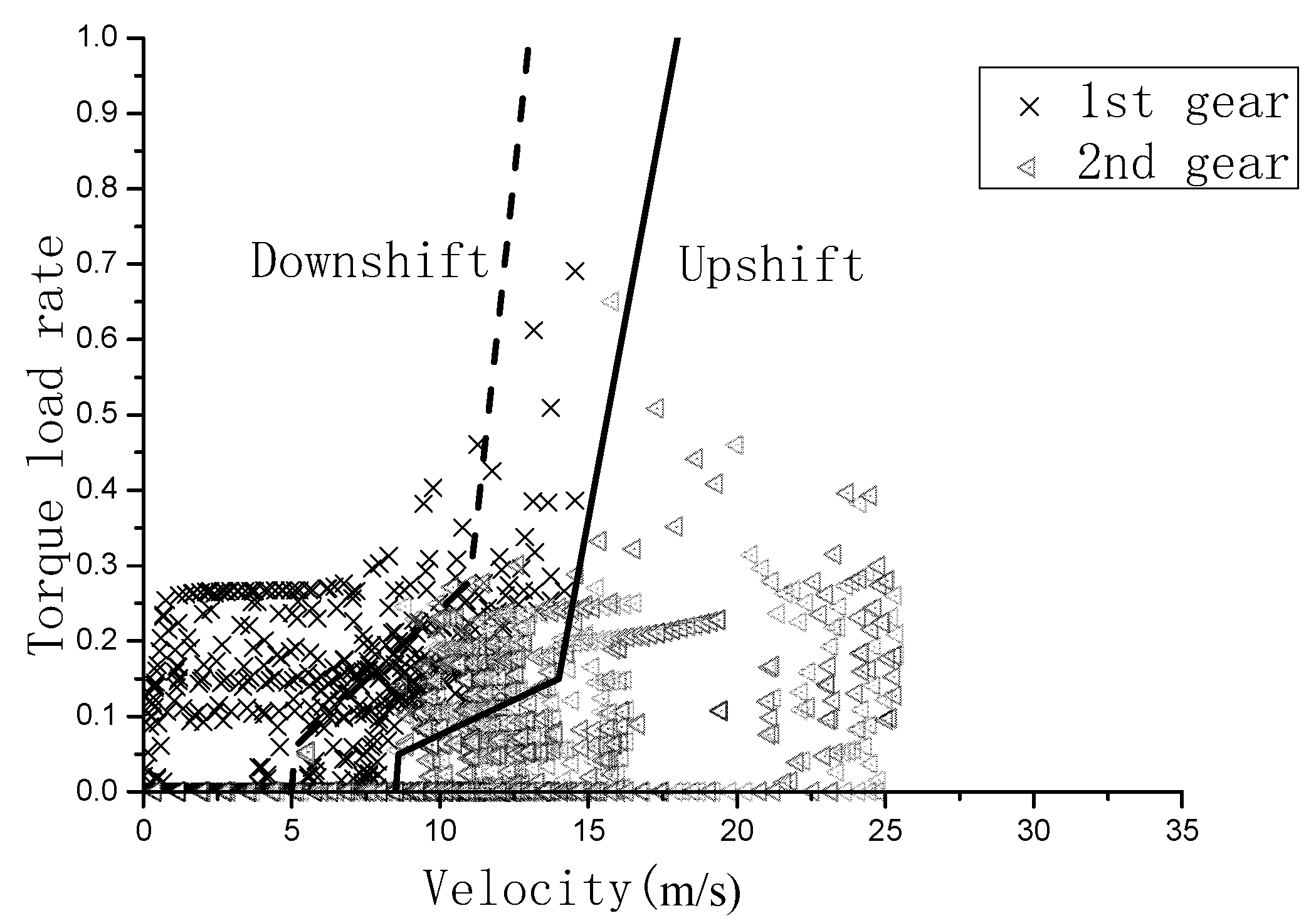
4.3. Shifting Schedule
5. Simulation and Result Analysis
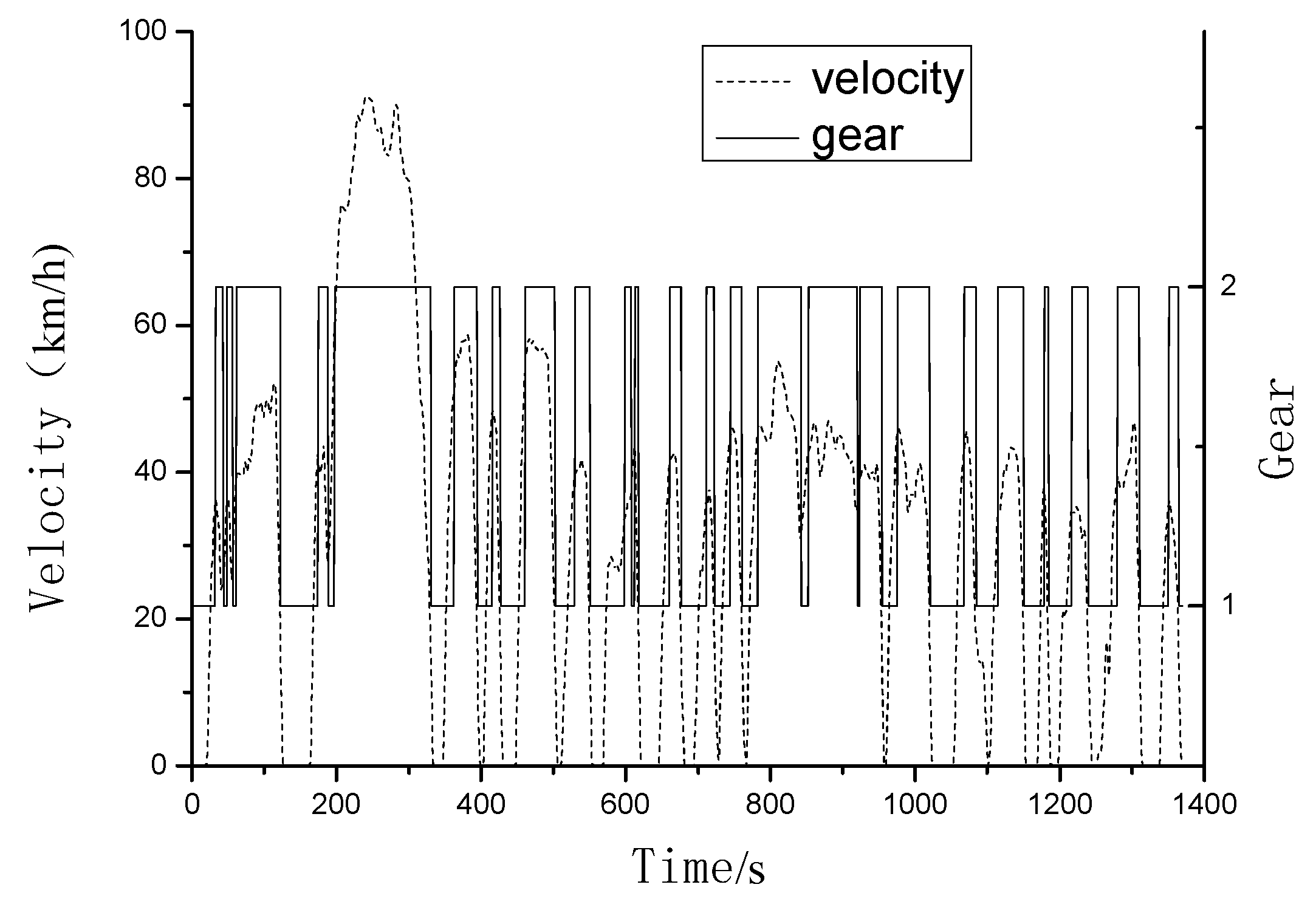
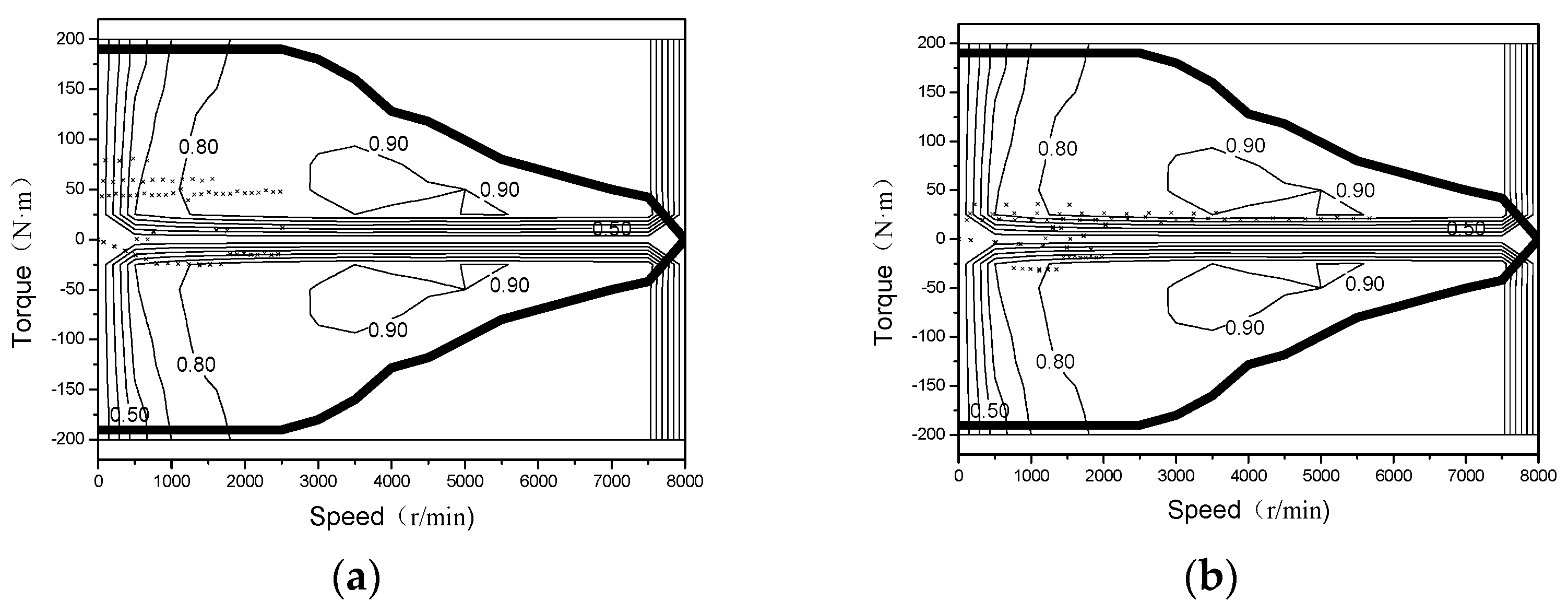
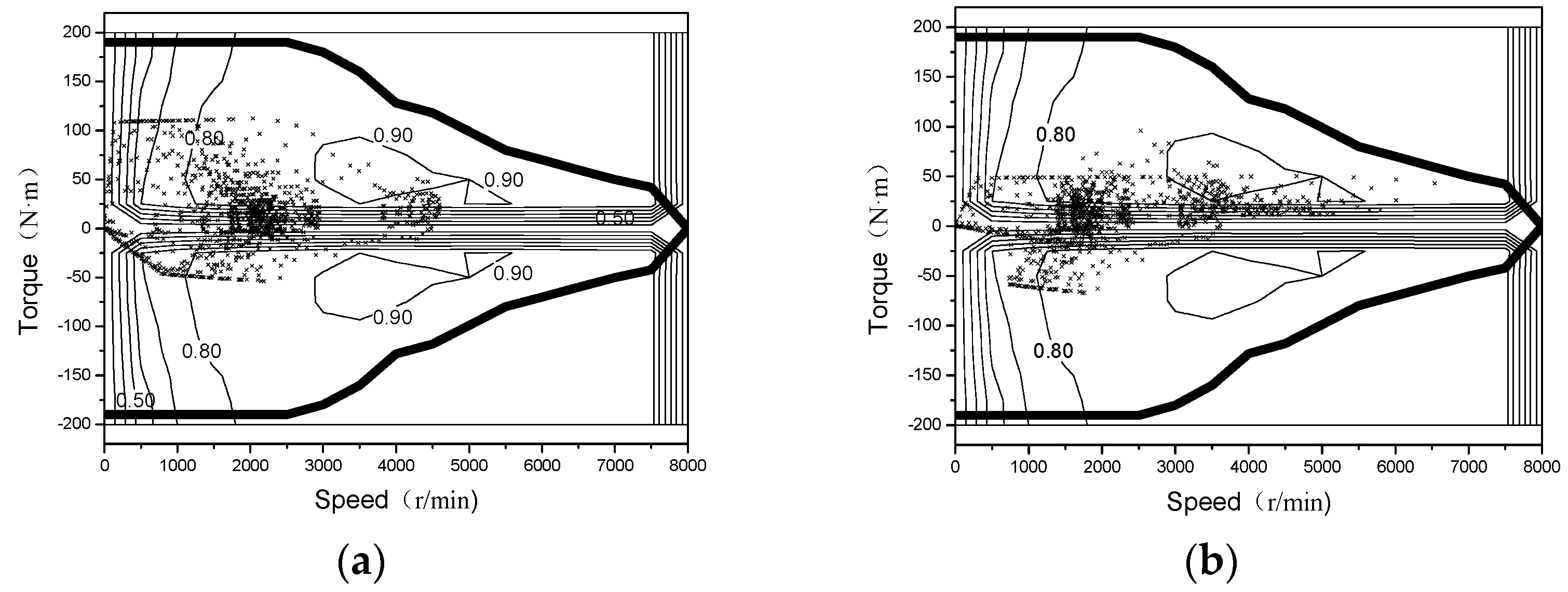
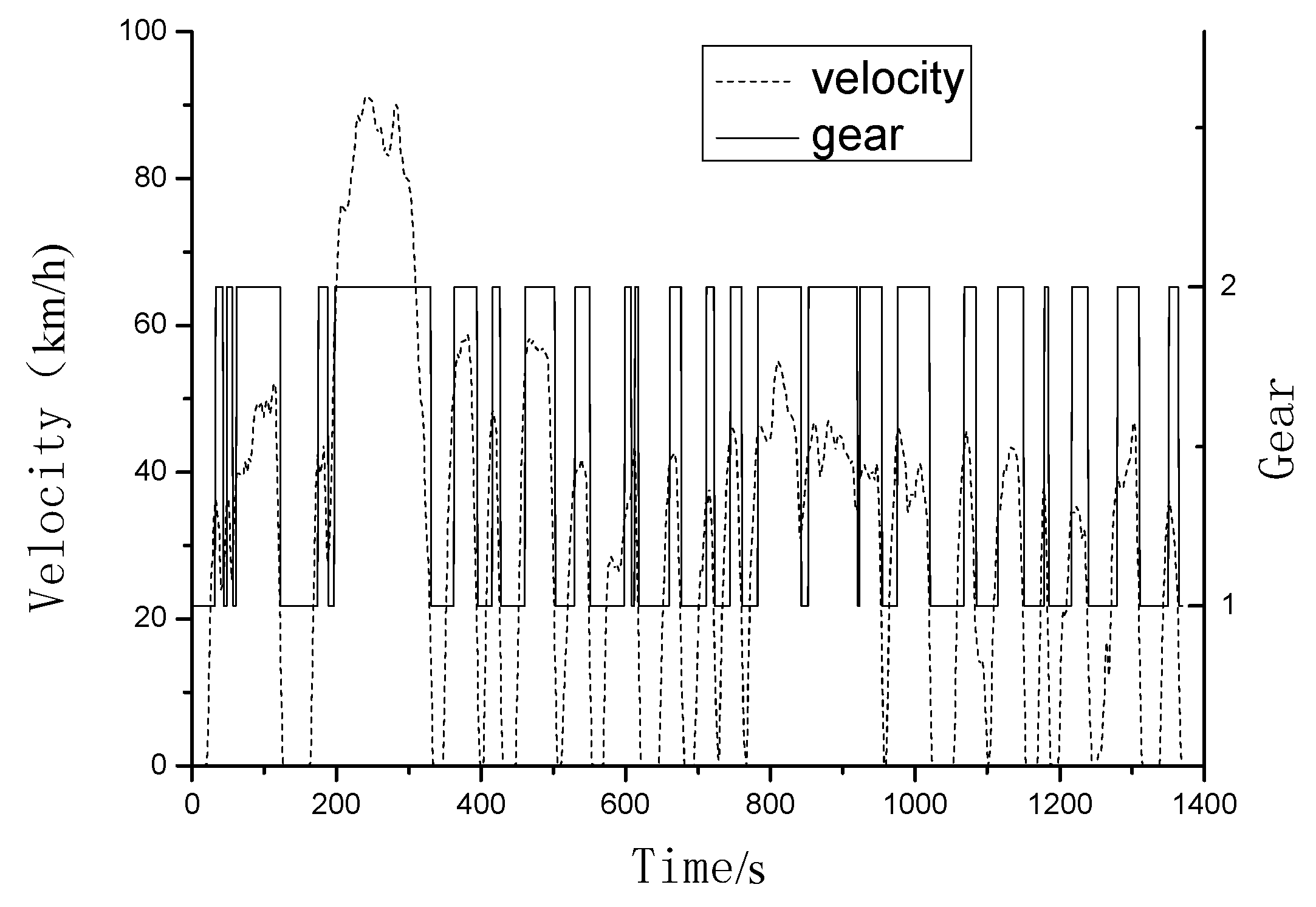
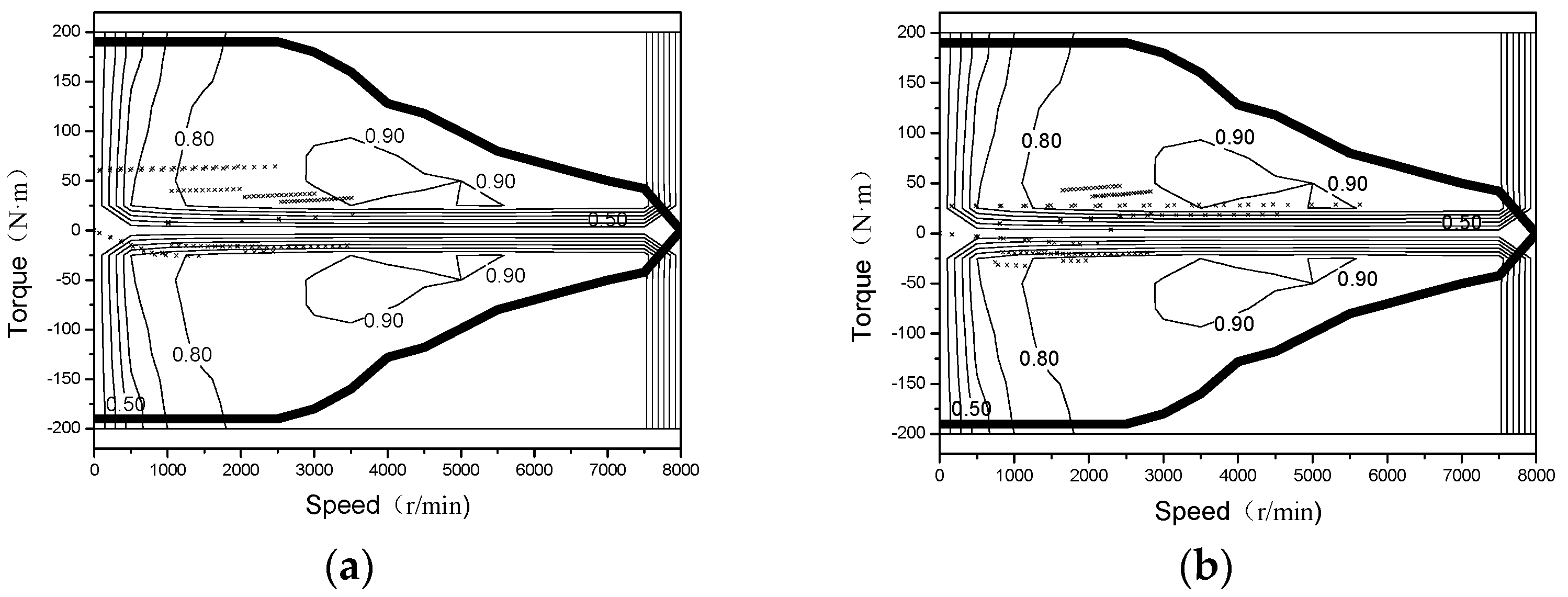
5.1. Gear Control Sequence and Transmission Efficiency
5.2. Economic Performance Comparison
5.3. Power Performance Comparison
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Huang, W.; Wang, Y.; Feng, K.; Zhang, J. Development of two-speed automatic transmission for electric vehicle. Automob. Technol. 2011, 2011, 17–21. [Google Scholar]
- Gao, B.; Liang, Q.; Xiang, Y.; Guo, L.; Chen, H. Gear ratio optimization and shift control of 2-speed I-AMT in electric vehicle. Mech. Syst. Signal Process. 2015, 50–51, 615–631. [Google Scholar] [CrossRef]
- Qin, D.; Zhou, B.; Hu, M.; Hu, J.; Wang, X. Parameters design of powertrain system of electric vehicle with two-speed gearbox. J. Chongqing Univ. 2011, 34, 1–6. [Google Scholar]
- Wang, X.; Cai, Y.; Zhou, Y.; Gao, S. A study on the effects of matching of automatic transmission on the energy consumption of electric vehicle. Automot. Eng. 2014, 36, 871–878. [Google Scholar]
- Wu, G.; Zhang, X.; Dong, Z. Impacts of Two-Speed Gearbox on Electric Vehicle’s Fuel Economy and Performance; Sae Technical Papers; SAE International: Warrendale, PA, USA, 2013; Volume 2, pp. 681–683. [Google Scholar]
- Zhan, C.; Wang, Q. Design and Optimization of Transmission Parameters of Electric Vehicle Based on Improved Genetic Algorithm. J. Chongqing Univ. 2020, 34, 1–5. [Google Scholar]
- Zhao, K.; Yao, W.; Liu, Y.; Ye, J. A Study of Power Shift Mechanical Transmission for Pure Electric Vehicle. China Mech. Eng. 2015, 26, 1697–1703. [Google Scholar]
- Zheng, J.; Chen, J. Optimization Design of Pure Electric Vehicle Power System Speed Ratio. J. Mech. Transm. 2019, 43, 79–82+93. [Google Scholar] [CrossRef]
- He, Z.; Bai, H. Automatic mechanical transmission technique development actuality and expectation. Trans. Chin. Soc. Agric. Mach. 2007, 38, 181–186. [Google Scholar]
- Wang, D.; Zhang, S.; Xu, S.; Li, X. Modeling and simulation of planetary gear type continuously variable transmission of electric vehicle. J. Chongqing Univ. Technol. Nat. Sci. 2010, 7–11. [Google Scholar]
- Wang, T.; Zhang, J.; Zhang, H.; Xiong, J. Simulation of electric vehicle’s performance with planetary gear two-speed transmission. China Meas. Test 2014, 40, 125–128. [Google Scholar]
- Balogh, L.; Stréli, T.; Németh, H.; Palkovics, L. Modelling and simulating of self-energizing brake system. Veh. Syst. Dyn. 2006, 44, 368–377. [Google Scholar] [CrossRef]
- Hartmann, H.; Schautt, M.; Pascucci, A.; Gombert, B. eBrake®—The Mechatronic Wedge Brake. Braking Syst. 2002, 11, 2146–2151. [Google Scholar]
- Yao, J.; Chen, L.; Yin, C. Modeling and Stability Analysis of Wedge Clutch System. Math. Probl. Eng. 2014, 2014, 712472. [Google Scholar] [CrossRef] [Green Version]
- Jiao, W.; Ma, F.; Yang, Y.; Zhao, X. Calculation of transmission ratio and effeciency of planetary gear box. J. Mech. Transm. 2012, 114–116. [Google Scholar]
- Shin, J.W.; Kim, J.O.; Choi, J.Y.; Oh, S.H. Design of 2-speed transmission for electric commercial vehicle. Int. J. Automot. Technol. 2014, 15, 145–150. [Google Scholar] [CrossRef]
- Cheng, Y.; Li, X.; Luo, J. Optimization of shifting schedule for vehicle with automated mechanical transmission. Comput. Simul. 2016, 3, 227–231. [Google Scholar]
- Zhang, W. Theory of Automobile, 3rd ed.; China Machine Press: Beijing, China, 2021. [Google Scholar]
- Wang, S.; Liu, J.; Ma, Z.; Wang, L. Design of Electric Vehicle Two-speed Transmission Ratio based on NEDC. J. Mech. Transm. 2020, 44, 79–83. [Google Scholar] [CrossRef]
- Yu, Z. Automobile Theory, 3rd ed.; China Machine Press: Beijing, China, 2020. [Google Scholar]
- Ye, J.; Zhao, K.; Huang, X.; Liu, Y.; Yao, W. Motor Coordinate Shift Control for a Two-speed Uninterrupted Shift Transmission of Pure Electric Vehicle. Automot. Eng. 2016, 38, 989–995+973. [Google Scholar] [CrossRef]
- Glielmo, L.; Iannelli, L.; Vacca, V.; Vasca, F. Gearshift control for automated manual transmissions. IEEE/ASME Trans. Mechatron. 2006, 11, 17–26. [Google Scholar] [CrossRef]
- Zheng, X.; Gong, W. ADVISOR 2002 EV Simulation and Redevelopment Applications; China Machine Press: Beijing, China, 2014. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gear | B1 | B2 |
|---|---|---|
| 1 | 1 | 0 |
| 2 | 0 | 1 |
| Parameter | Value | |
|---|---|---|
| Vehicle | Mass/m | 1246 kg |
| Frontal area/A | 2 m2 | |
| Wheel radius/r | 0.282 m | |
| Main reducer gear ratio/i0 | 1 | |
| Transmission ratio/ig | 5.3 | |
| Rolling resistance coefficient/f | 0.009 | |
| Air drag coefficient/Cd | 0.335 | |
| Motor | Rated power/PN | 59 kW |
| Maximum speed/nmax | 8000 r·min−1 | |
| Transmission | Transmission Efficiency | ||
|---|---|---|---|
| ECE | UDDS | 1015 | |
| Fixed speed | 99.00% | 99.00% | 99.00% |
| 2-speed | 97.20% | 97.04% | 97.05% |
| Transmission | Gear Ratio | ΔSOC | Weighted Average | ||
|---|---|---|---|---|---|
| ECE | UDDS | 1015 | |||
| Fixed speed | 5.3 | 0.011384 | 0.149638 | 0.048443 | 0.1171 |
| 2-speed | 1st 12.2 | 0.011128 | 0.147683 | 0.048266 | 0.1157 |
| 2nd 4.3 | |||||
| Efficiency improved | 2.25% | 1.31% | 0.37% | 1.22% | |
| Transmission | Motor Efficiency | ||
|---|---|---|---|
| ECE | UDDS | 1015 | |
| Fixed speed | 74.17% | 80.00% | 80.12% |
| 2-speed | 77.74% | 82.92% | 82.17% |
| Transmission | Acceleration Time (s) | Maximum Gradeability | Maximum Speed | ||
|---|---|---|---|---|---|
| Fixed speed | 5.4 | 10.4 | 15.9 | 28.70% | 145 |
| 2-speed | 3.8 | 9.6 | 15.3 | 42.60% | 144.9 |
| Improved | 30% | 8% | 4% | 48% | —— |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Yang, J.; Zhang, W. Influence of a New Type of Two-Speed Planetary Gear Automatic Transmission on the Performance of Battery Electric Vehicles. Energies 2022, 15, 4162. https://doi.org/10.3390/en15114162
Zhang W, Yang J, Zhang W. Influence of a New Type of Two-Speed Planetary Gear Automatic Transmission on the Performance of Battery Electric Vehicles. Energies. 2022; 15(11):4162. https://doi.org/10.3390/en15114162
Chicago/Turabian StyleZhang, Wei, Jue Yang, and Wenming Zhang. 2022. "Influence of a New Type of Two-Speed Planetary Gear Automatic Transmission on the Performance of Battery Electric Vehicles" Energies 15, no. 11: 4162. https://doi.org/10.3390/en15114162
APA StyleZhang, W., Yang, J., & Zhang, W. (2022). Influence of a New Type of Two-Speed Planetary Gear Automatic Transmission on the Performance of Battery Electric Vehicles. Energies, 15(11), 4162. https://doi.org/10.3390/en15114162