
Adaptive Charge-Compensation-Based Variable On-Time Control to Improve Input Current Distortion for CRM Boost PFC Converter


Abstract
:
1. Introduction
2. Proposal of ACVOT Control
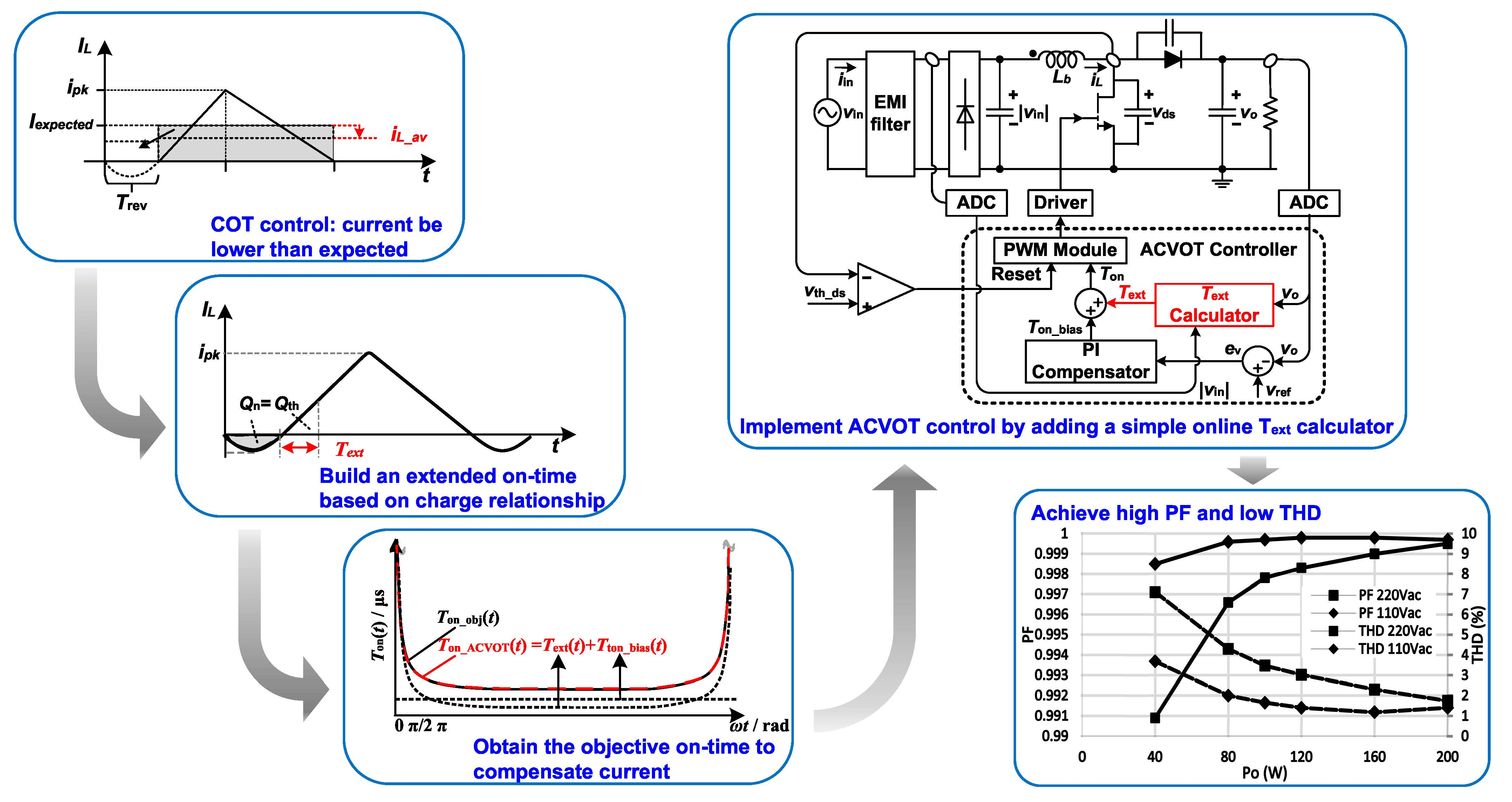
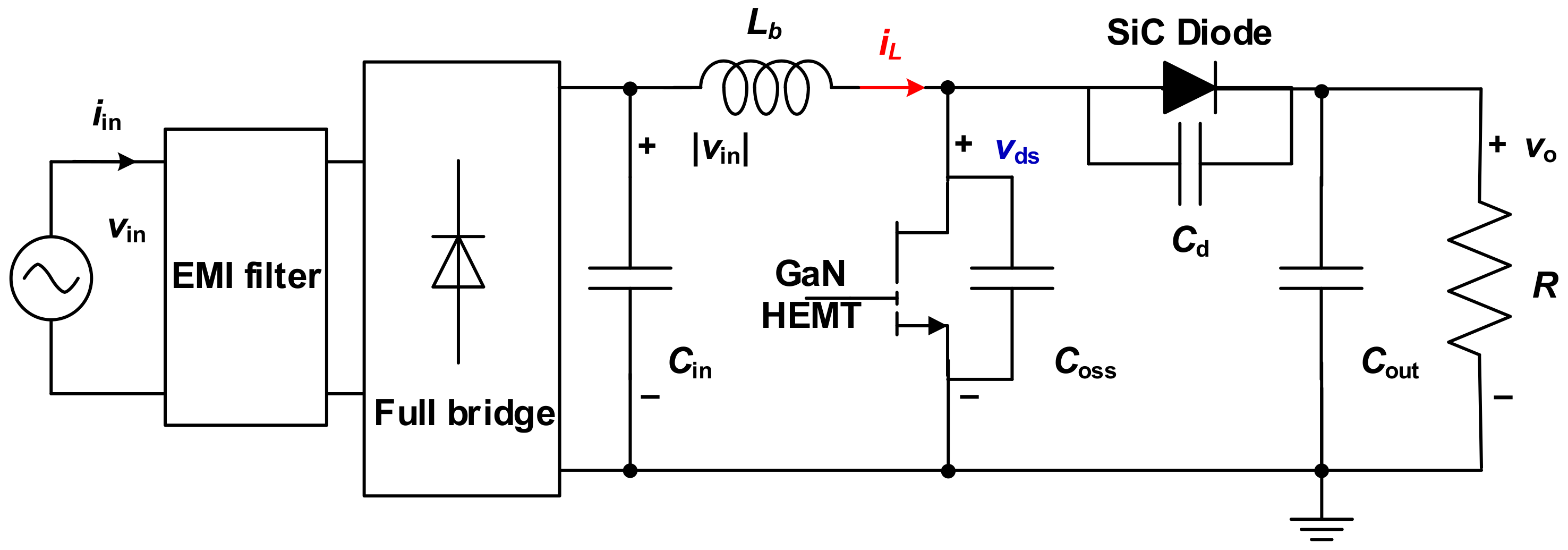
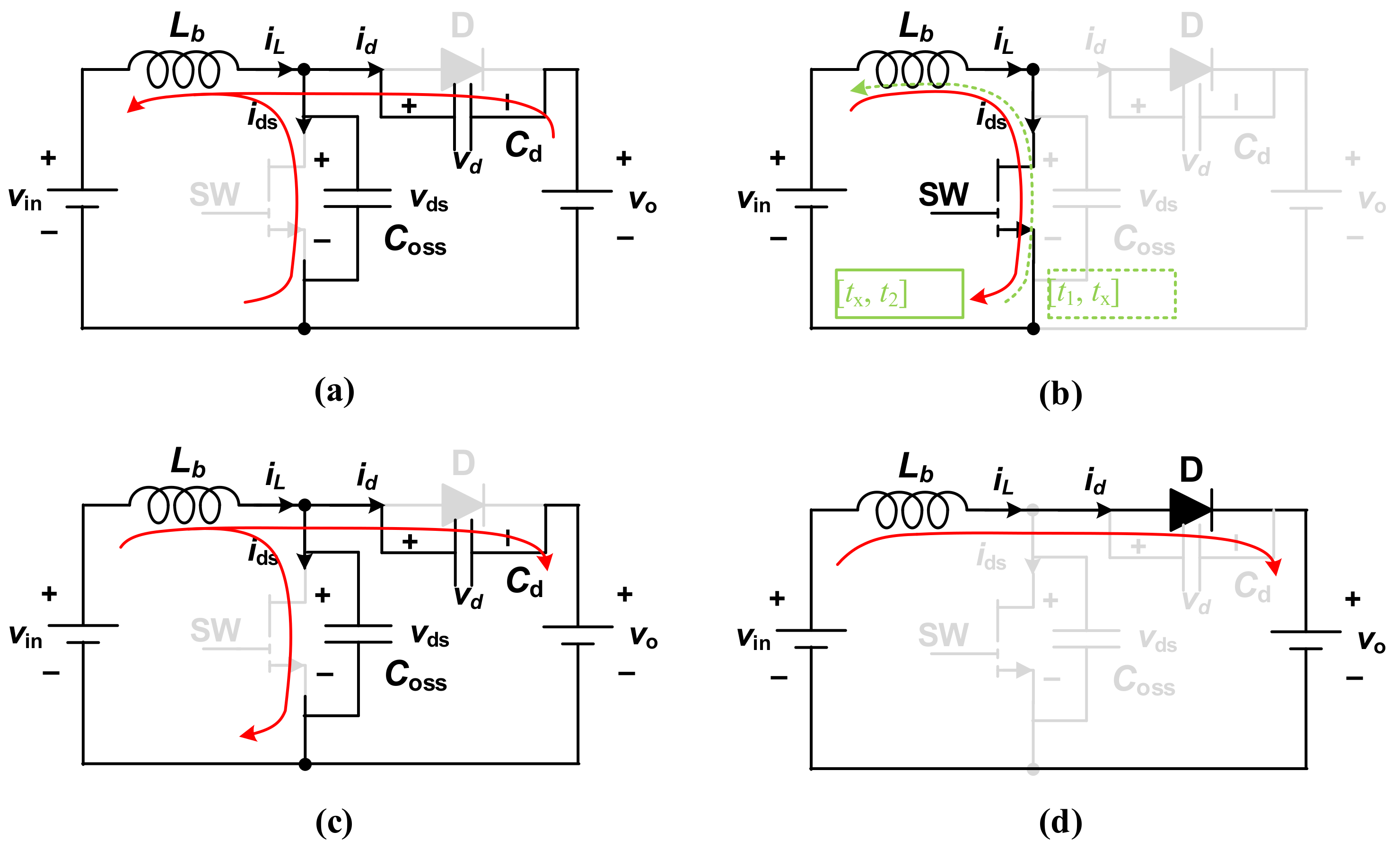
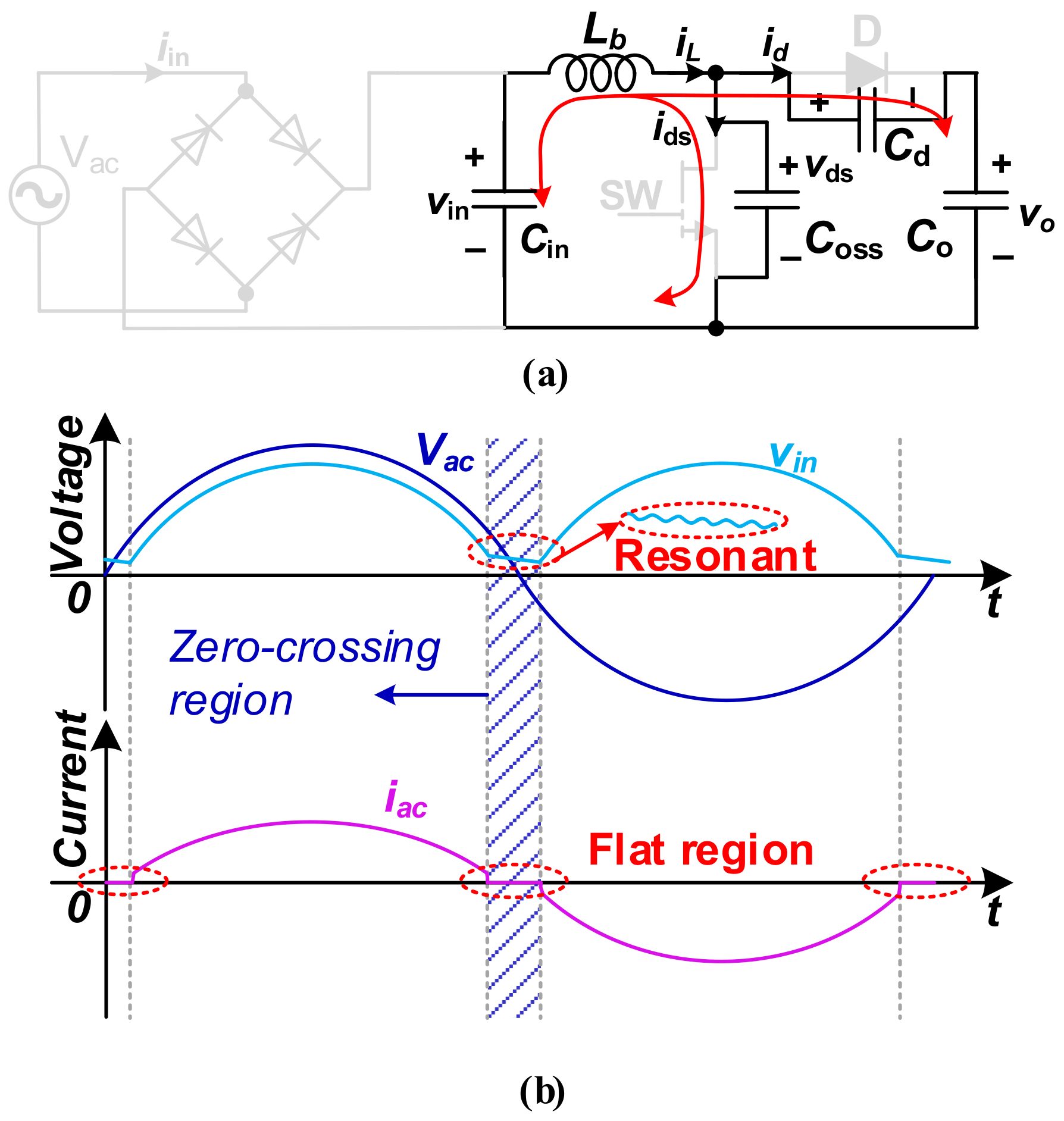
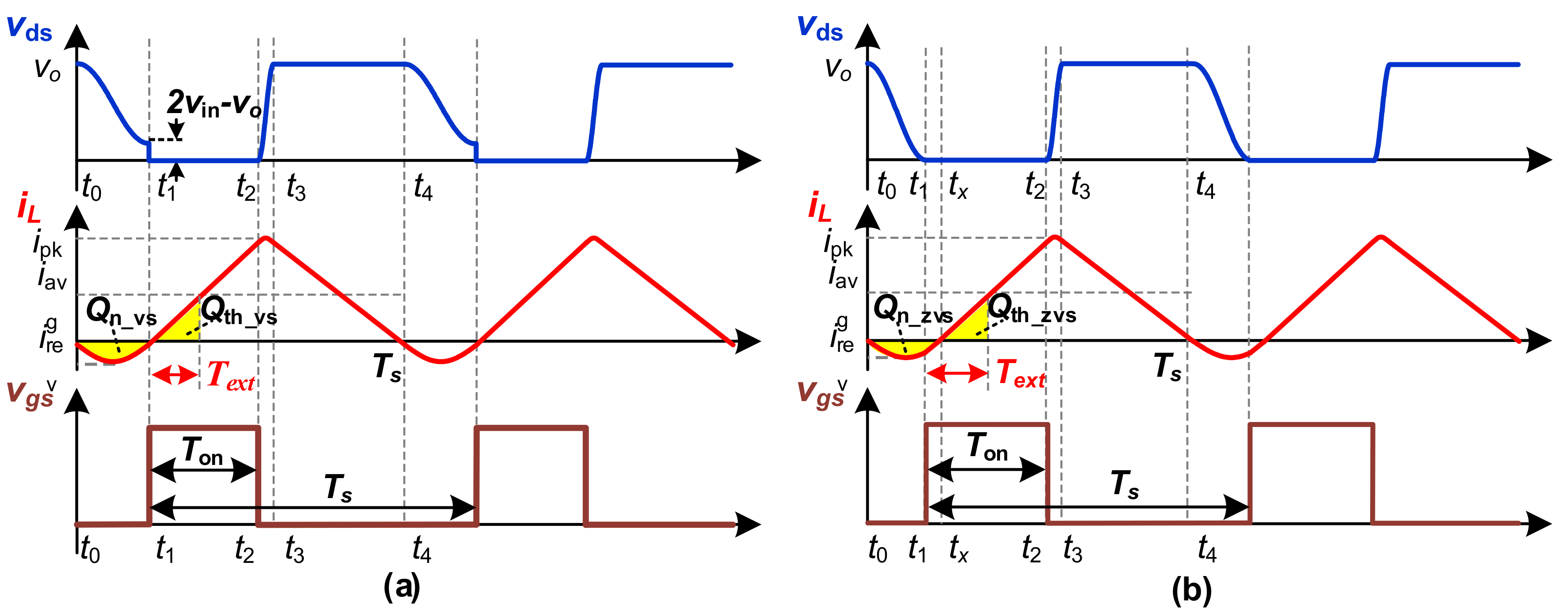
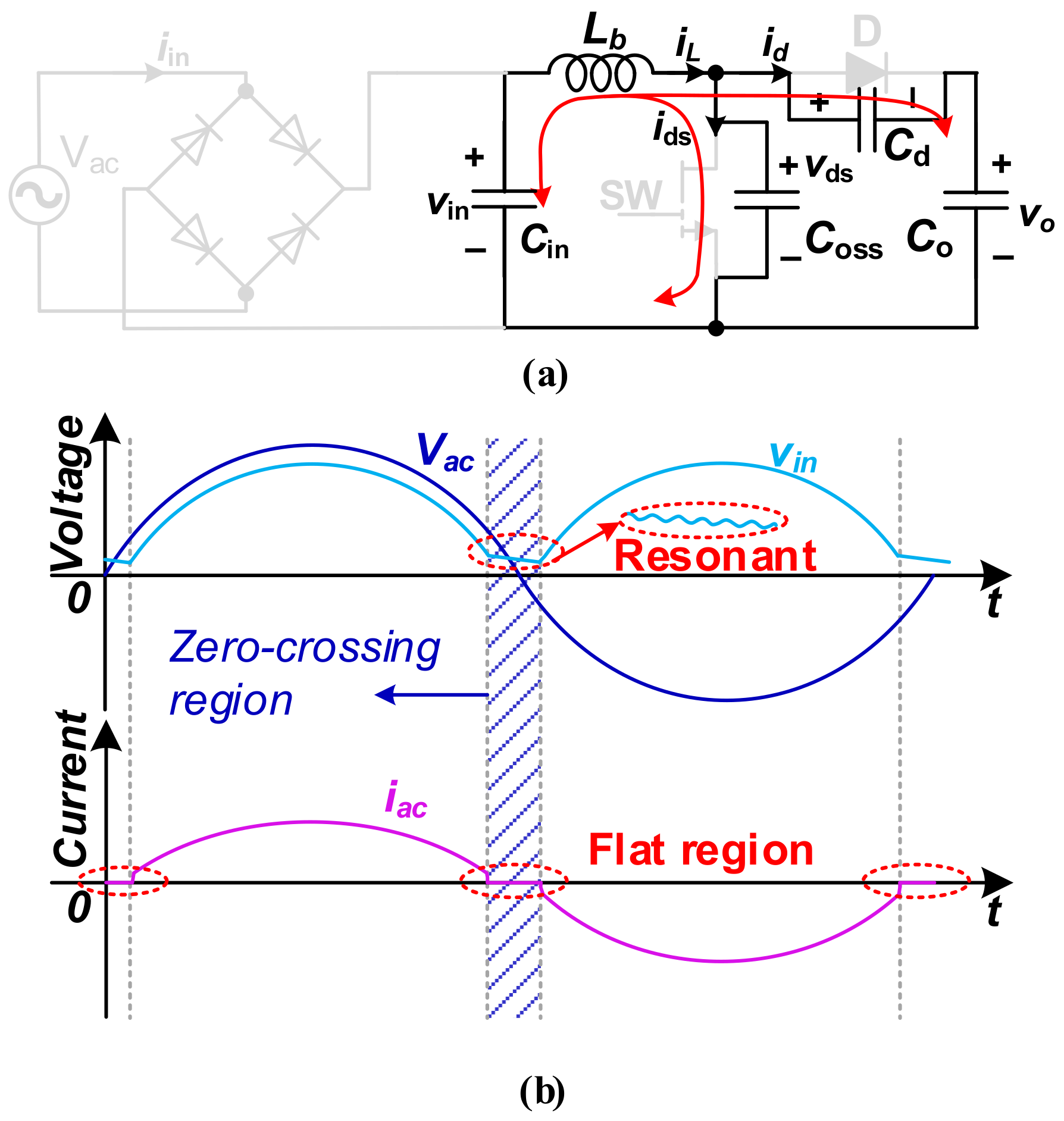
2.1. A General Analysis of CRM Boost PFC
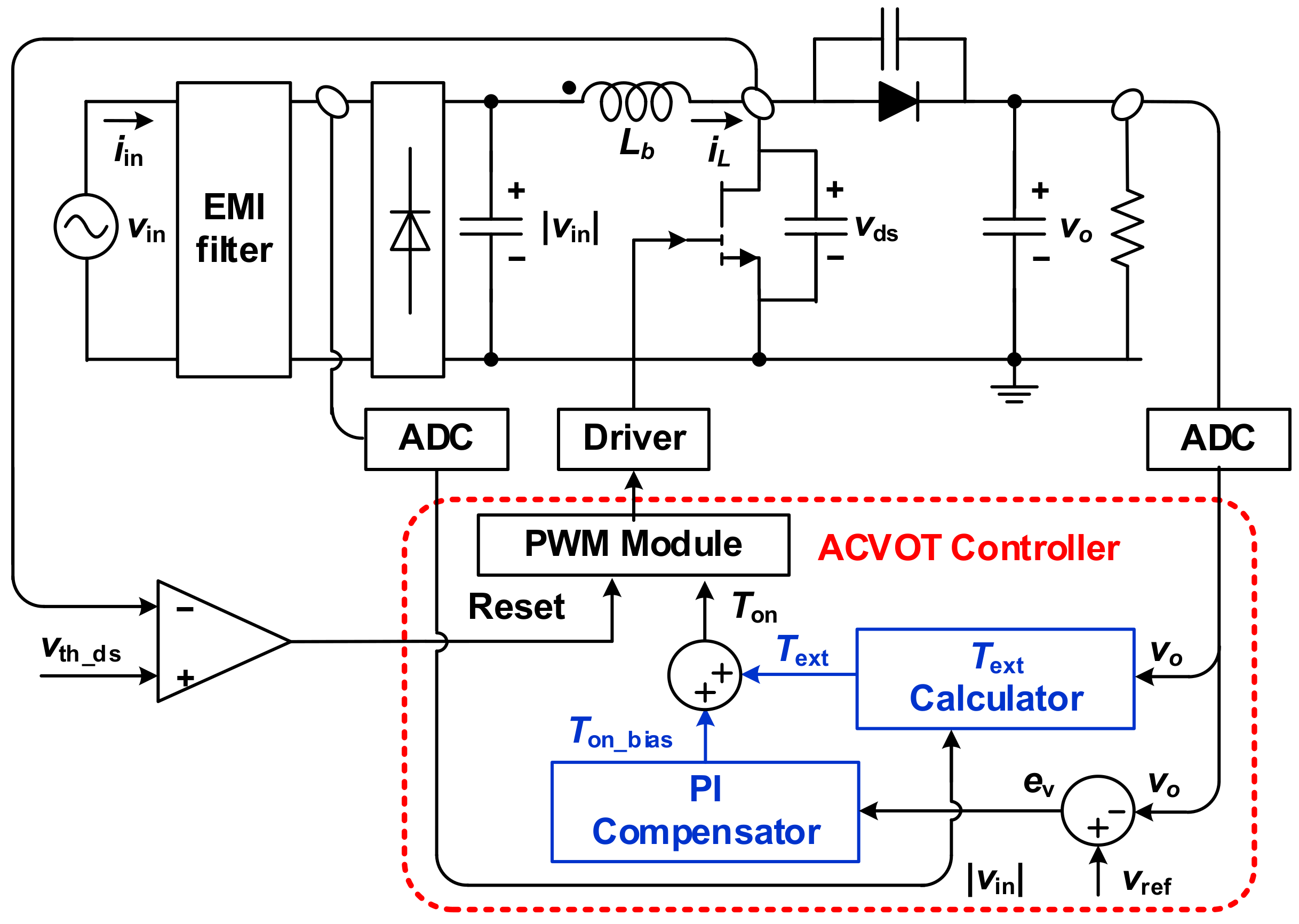
2.2. The Proposal of ACVOT Control
3. Simulations and Details of the ACVOT Control
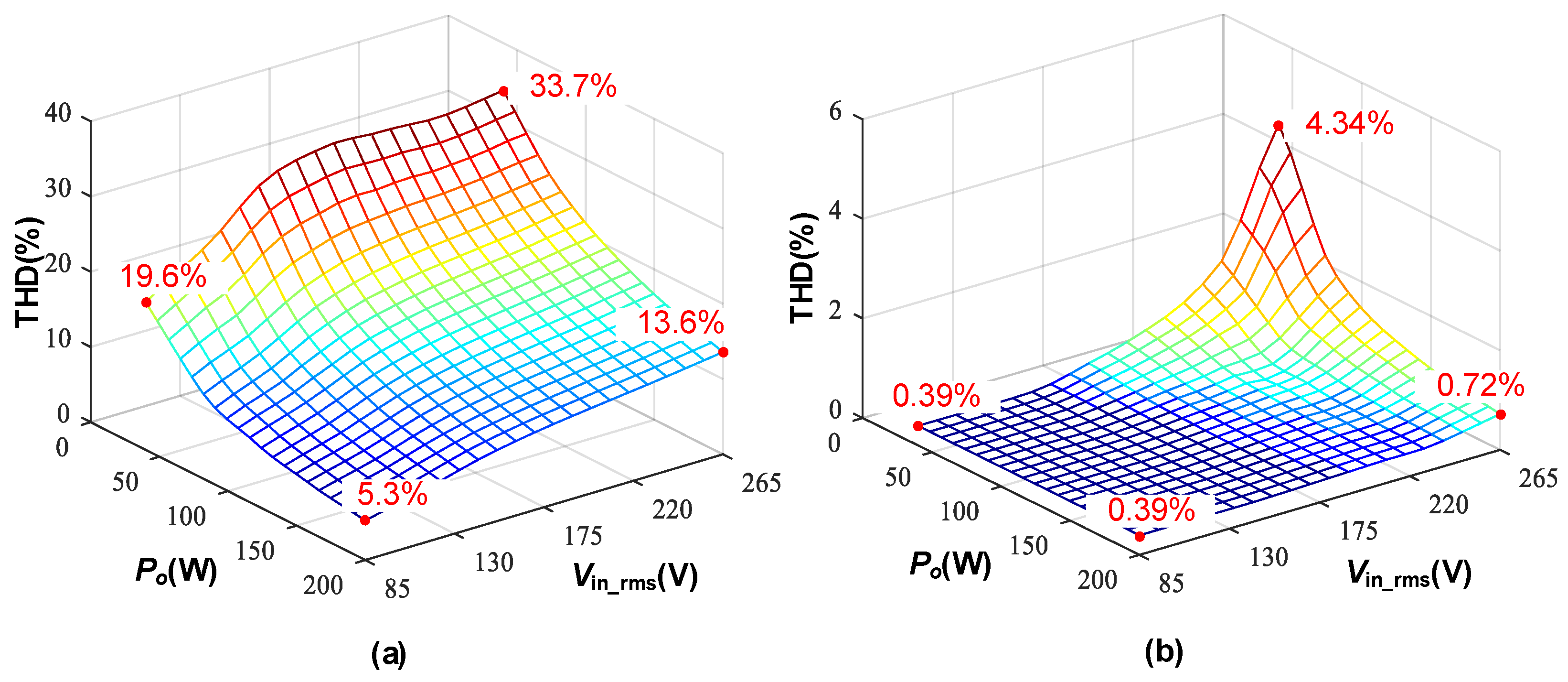
3.1. Mathematical Simulations for the ACVOT Control
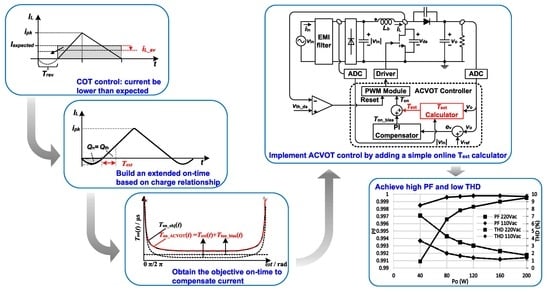
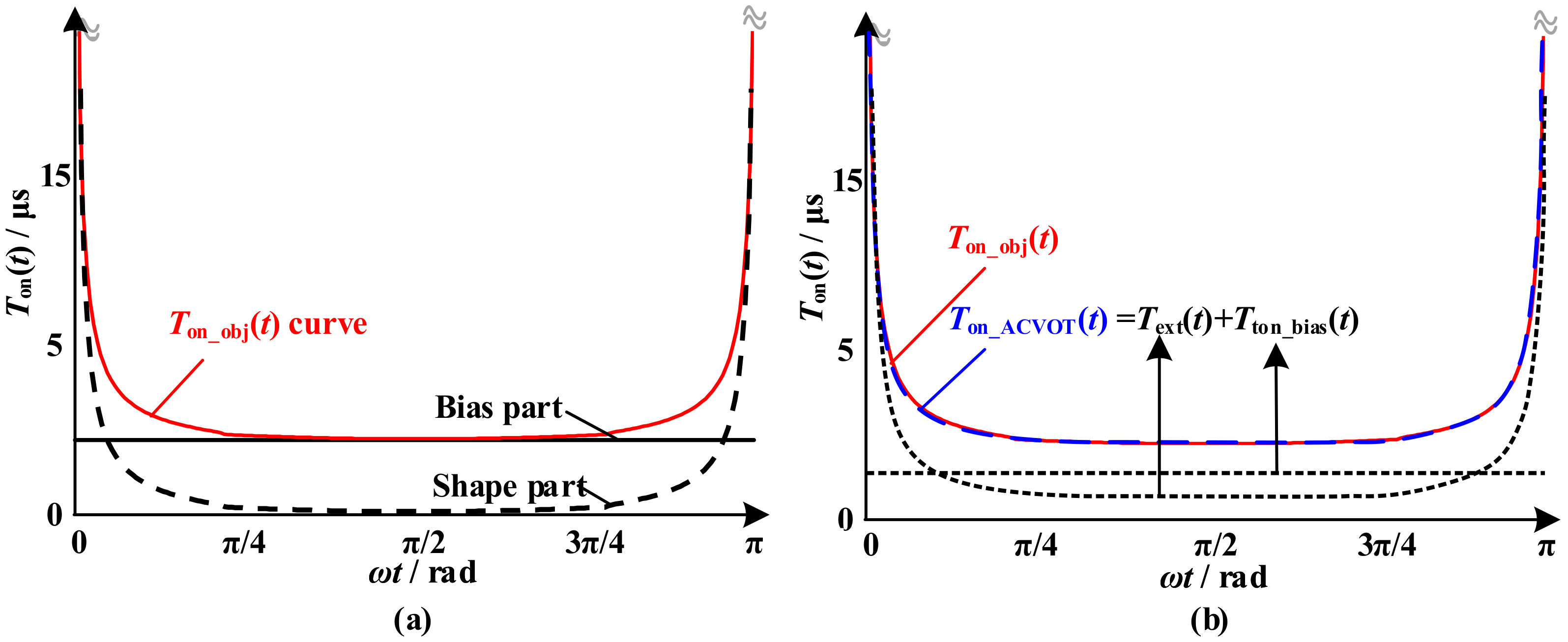
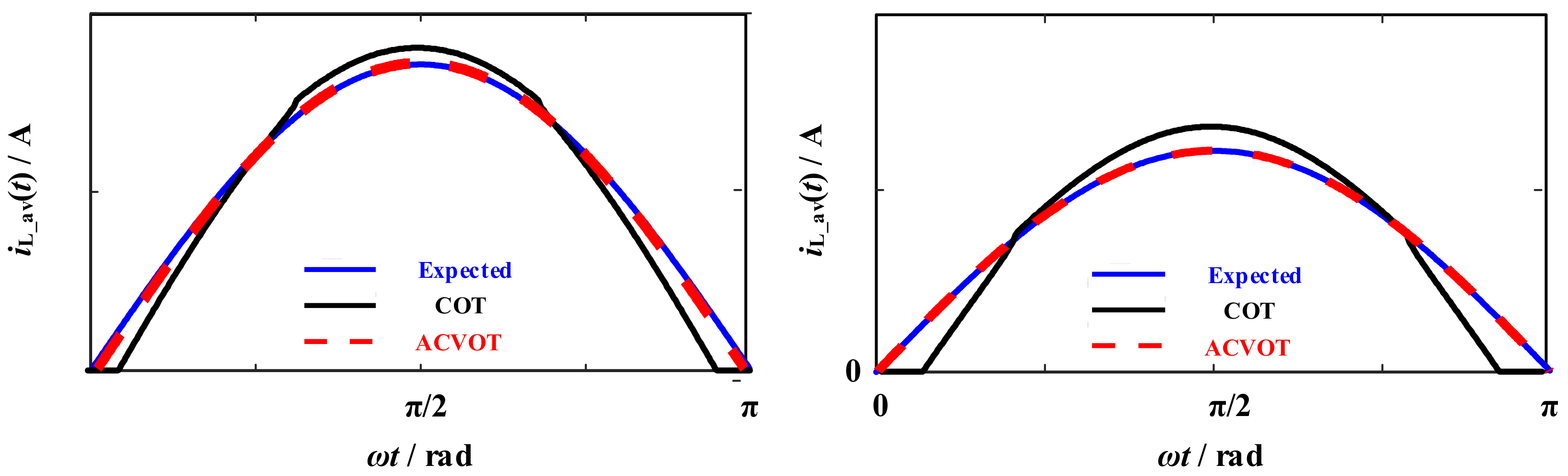
- Under arbitrary Po and Vin_rms, the reference inductor current is given by Equation (6), the bias conduction time is given by Equation (16), and the extended on-time is determined by Equation (15). Then, the on-time Ton_ACVOT(t) curve is calculated by Equation (17).
- With the Ton_ACVOT(t), the average inductor current curve is estimated by Equation (3). Further, the input power Pin_cal is calculated by integration in each half-line cycle. Since the feedback loop keeps adjusting the amplitude of the expected input current Iin_exp to match the output power, an adjusting process is applied as follows: when Pin_cal − Po > 0, the loop shifts Iin_exp downward. When Pin_cal − Po < 0, the loop shifts Iin_exp upward. Thus, the Pin_cal can be regulated to match the Po. After several iterations, the stable state of the closed-loop ACVOT controller is obtained.
- The above two steps are repeated to obtain data in full input and load range. For comparison, the simulations about the COT control are also applied by the same steps.
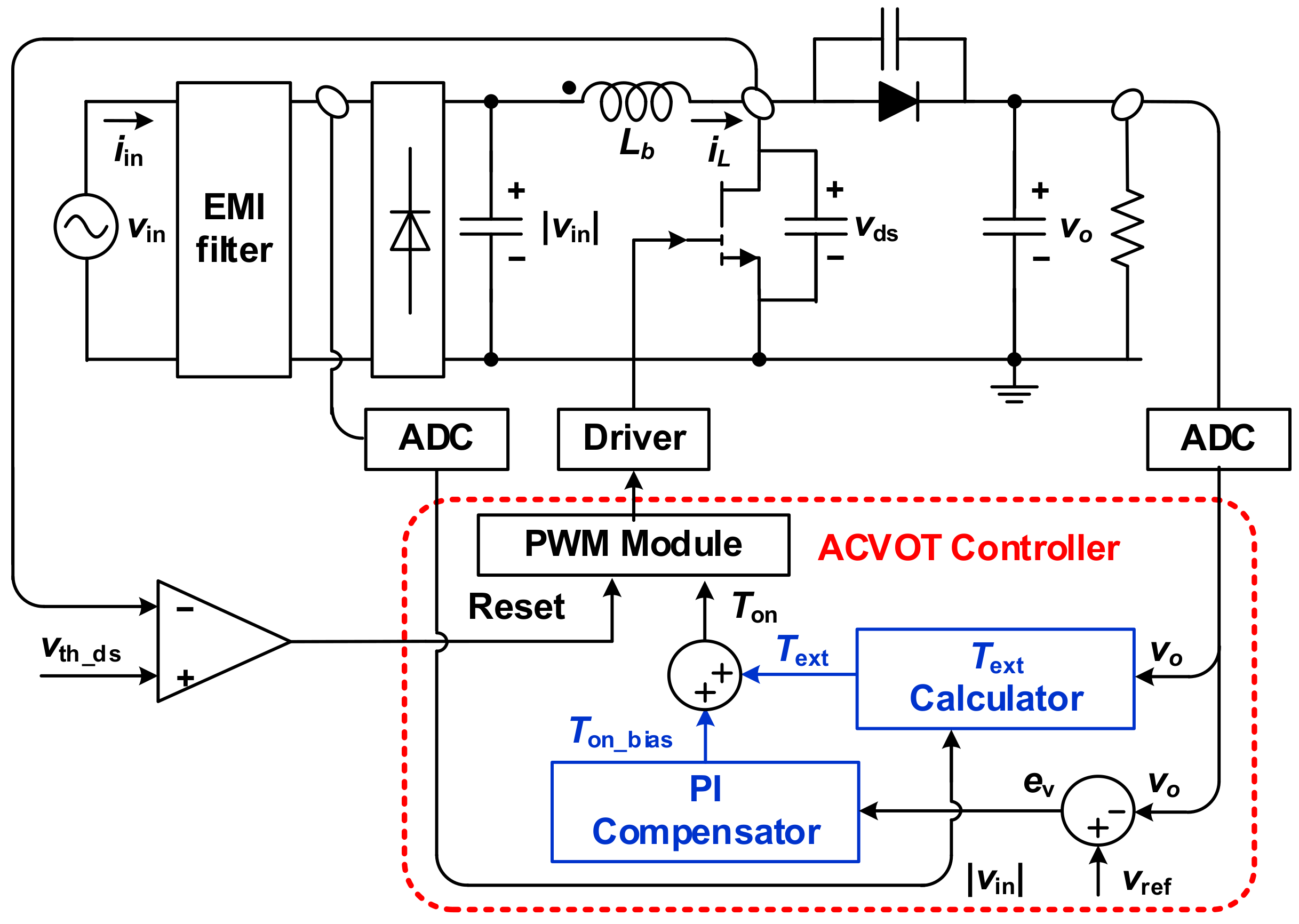
3.2. Implementation Problems of ACVOT Control
3.3. Features of ACVOT Control
- Only a simple and fixed calculation is required to realize the compensation within the universal ac input and entire load range. There is no need to detect the maximum value of input voltage or calculate the phase of input voltage, and any pre-calculation procedure is avoided for designers.
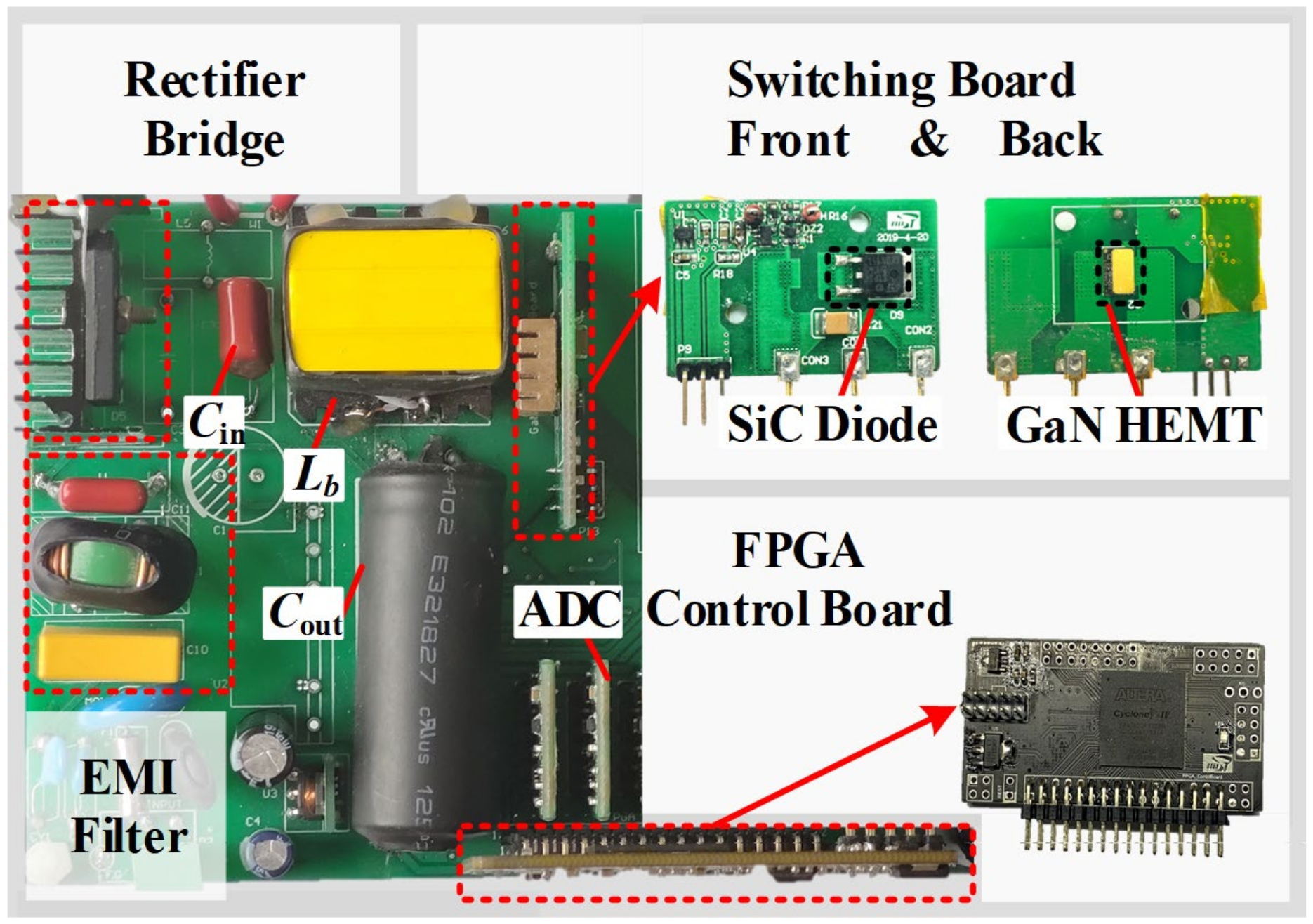
- The longest chain length of total calculation is six and they are basic operations except for one square root operation. To evaluate the resource consumption, an FPGA controller (EP4CE22F17C8N with ALTFP calculation IP cores) is used, the time and space consumption is reflected by the required clock-cycles, and the LUTs/registers resource is used. Table 4 compares the computing consumption between the ACVOT control and the control in [22], since [22] has the lowest operations consumption among the referenced digital methods that are not LUT-based (explained in Appendix A). As shown in Table 4, the ACVOT control consumes 54%/43% less LUTs/registers resources than the previous control.
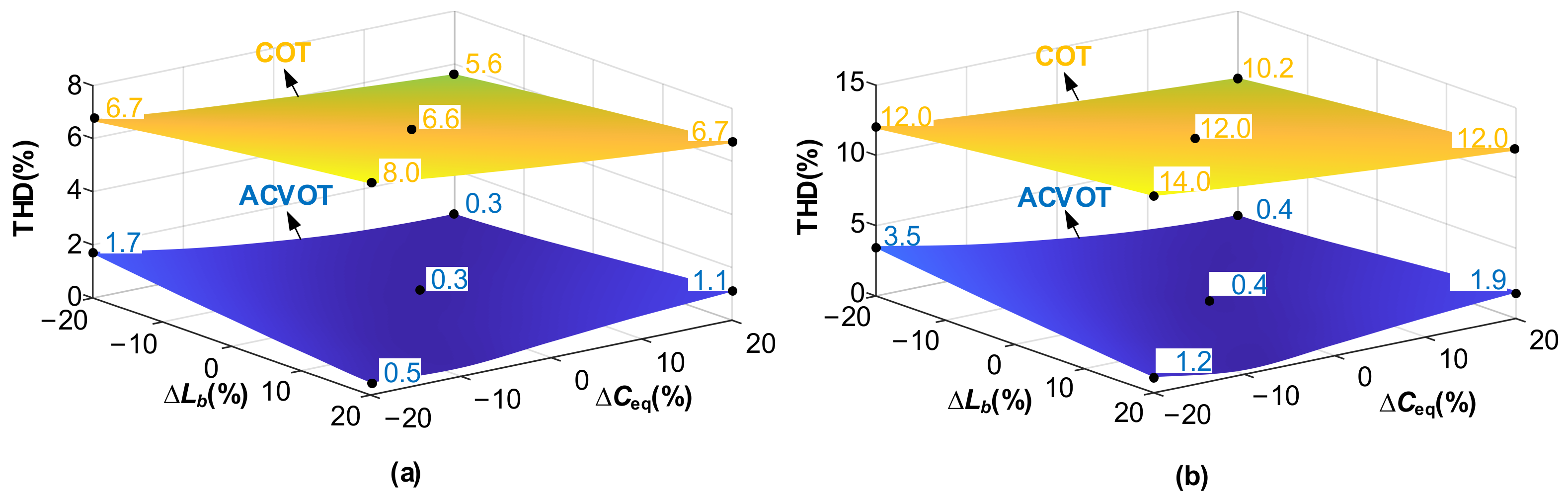
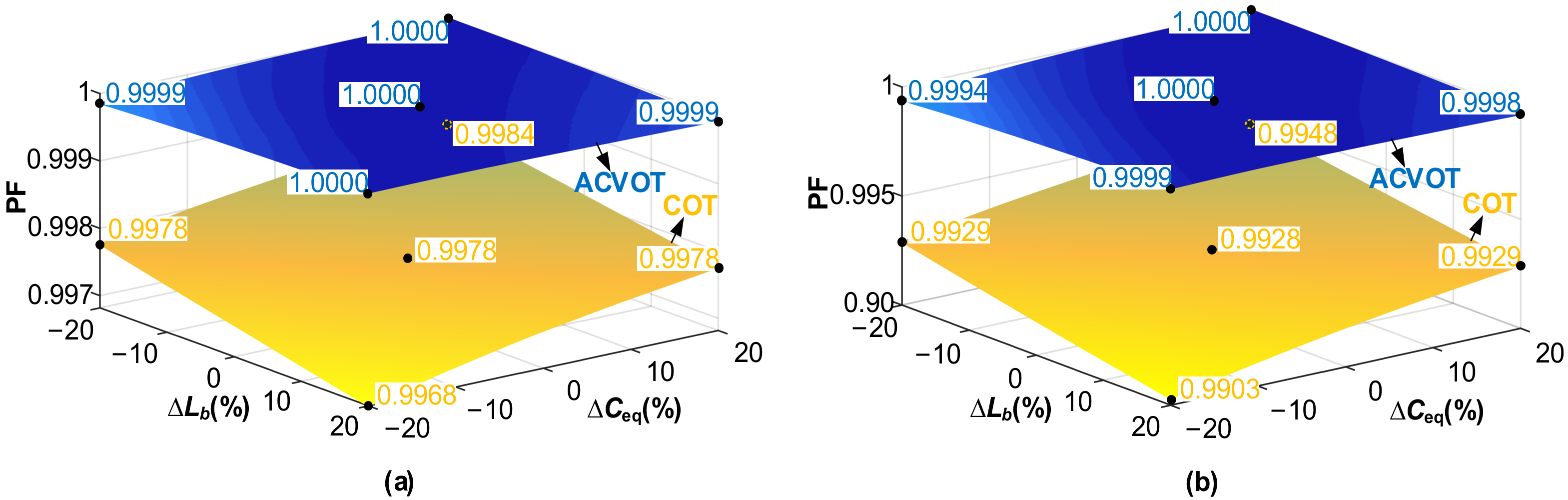
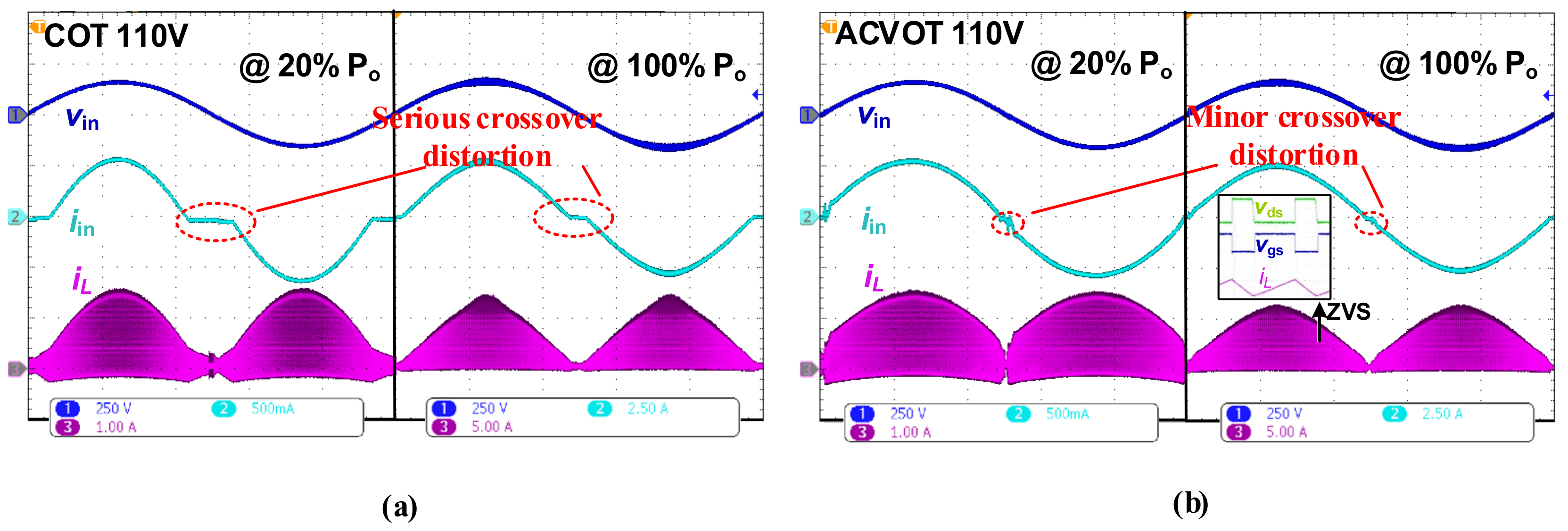
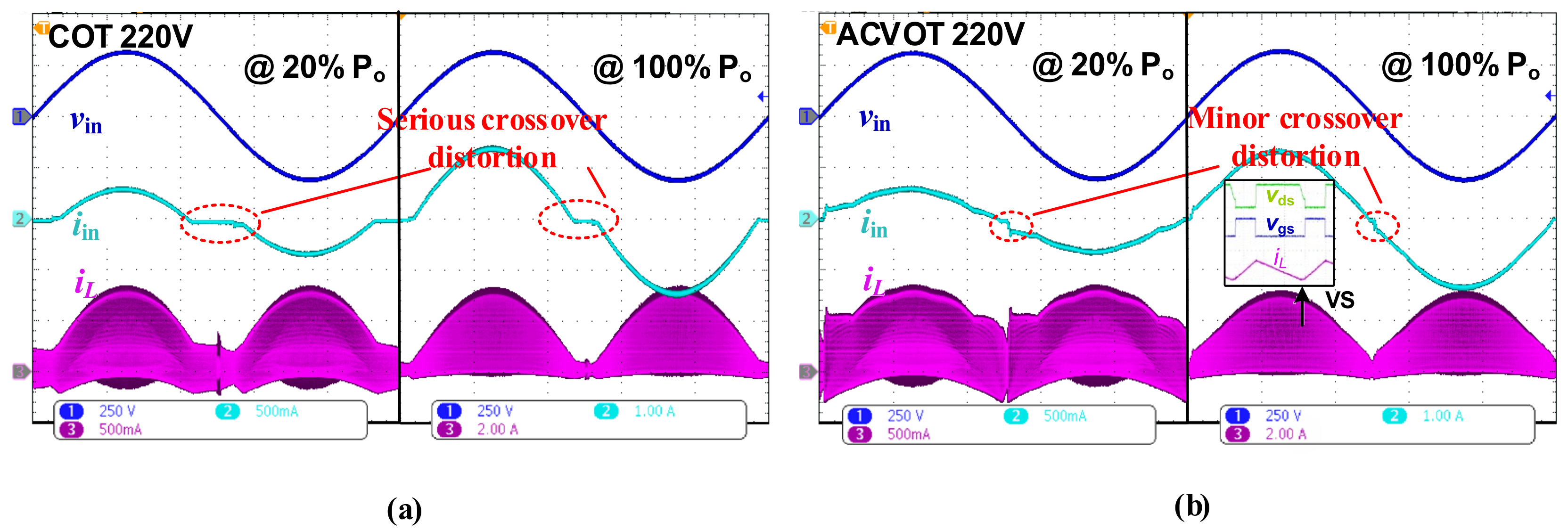
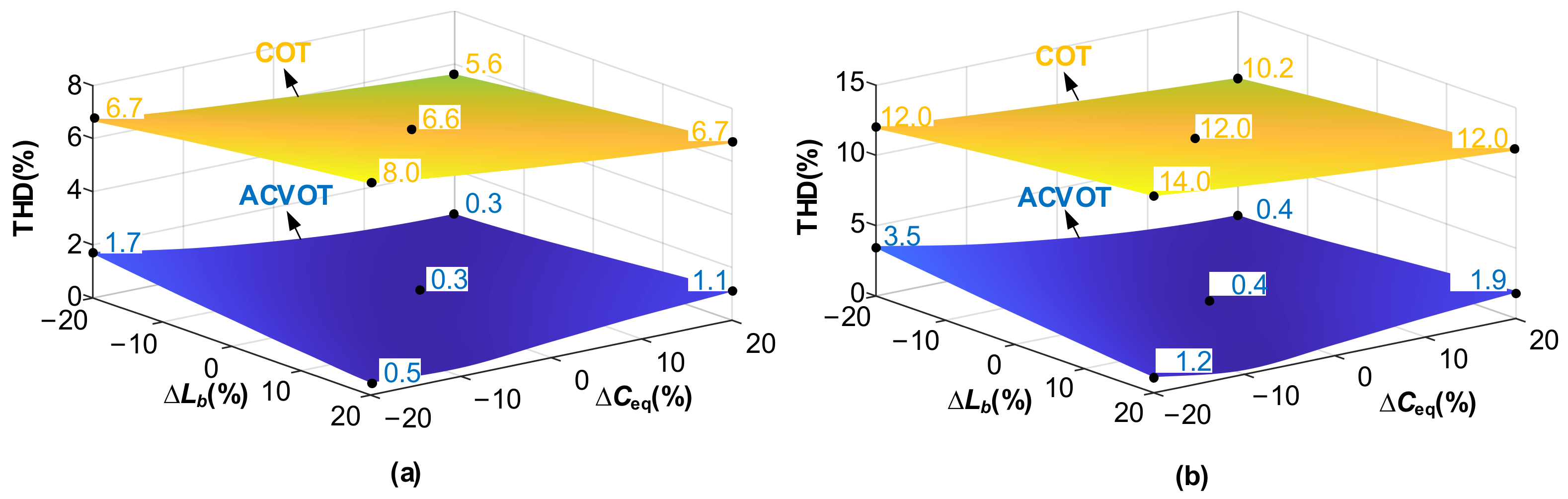
- Moreover, the input current distortion can be significantly reduced. According to Fourier analysis, the total harmonic component is less than 1% of the fundamental waveform at the condition in Figure 8. The fault tolerance of Lb and Ceq is sufficient, which guarantees the robustness of the ACVOT control. The experiments in the next section further verify the performance of the ACVOT control. In general, it is a real-time method with minimal cost but remarkable performance among the VOT controls.
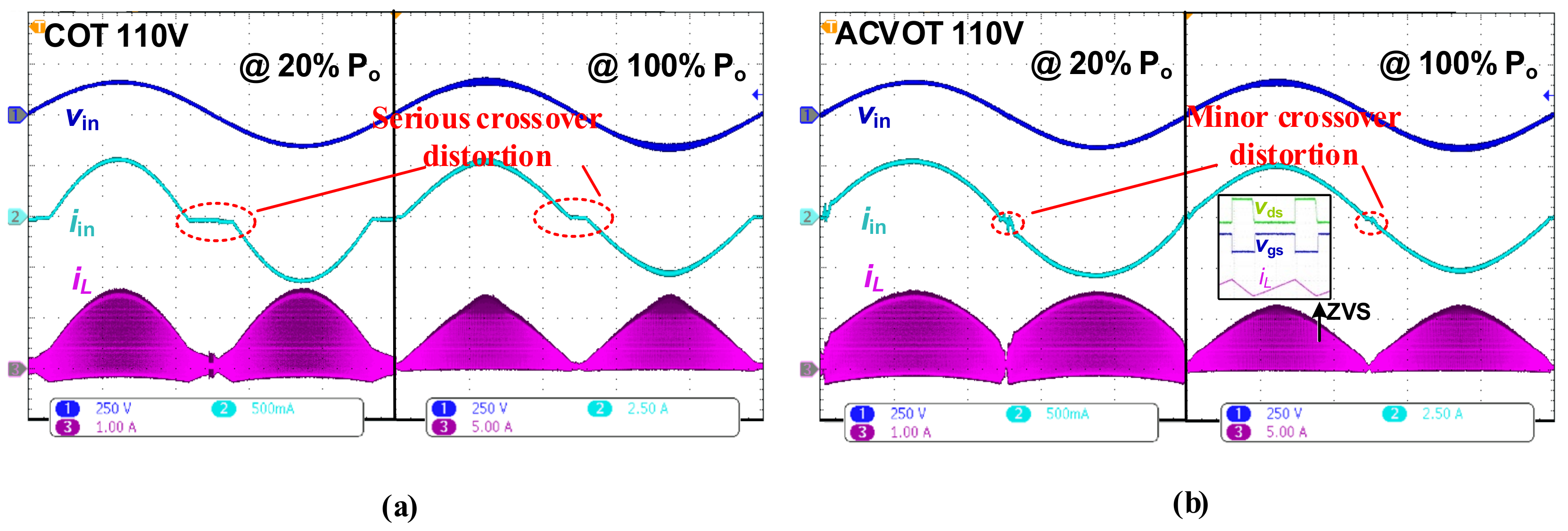
4. Experimental Results and Discussions
- Building an iterative model to acquire a table with right on-time values, which finally fits specific sinusoidal iL_av curve;
- Converting the table into a suitable storage file (satisfy different controllers of small power converter);
- Adding storage units and accessing logic to the controller;
- Adding accurate input phase detection to help table look-up.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controls | ACVOT | [15] | [18] | [20] | [22] | [25] |
|---|---|---|---|---|---|---|
| Input line voltage | 90–240 Vac | 90–240 Vac | 90–264 Vac | N/A | 90–230 Vac | N/A |
| Output voltage | 400 V | 400 V | 400 V | 400 V | 380 V | 400 V |
| Rated power | 200 W | 200 W | 160 W | 30 W | 200 W | 100 W |
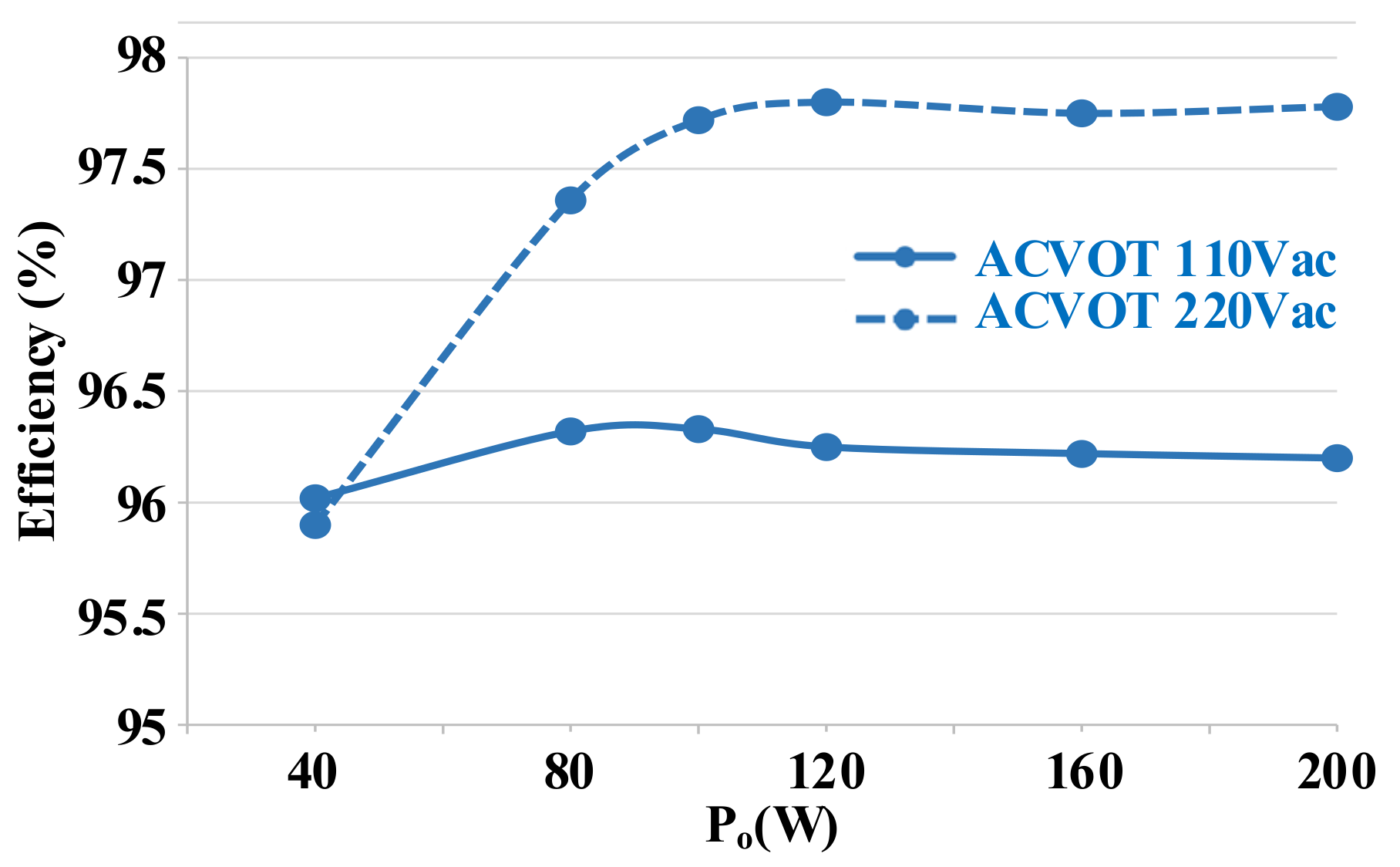
| Efficiency (max) | 97.8% | N/A | 98.35% | 91.6% | 97.35% | N/A |
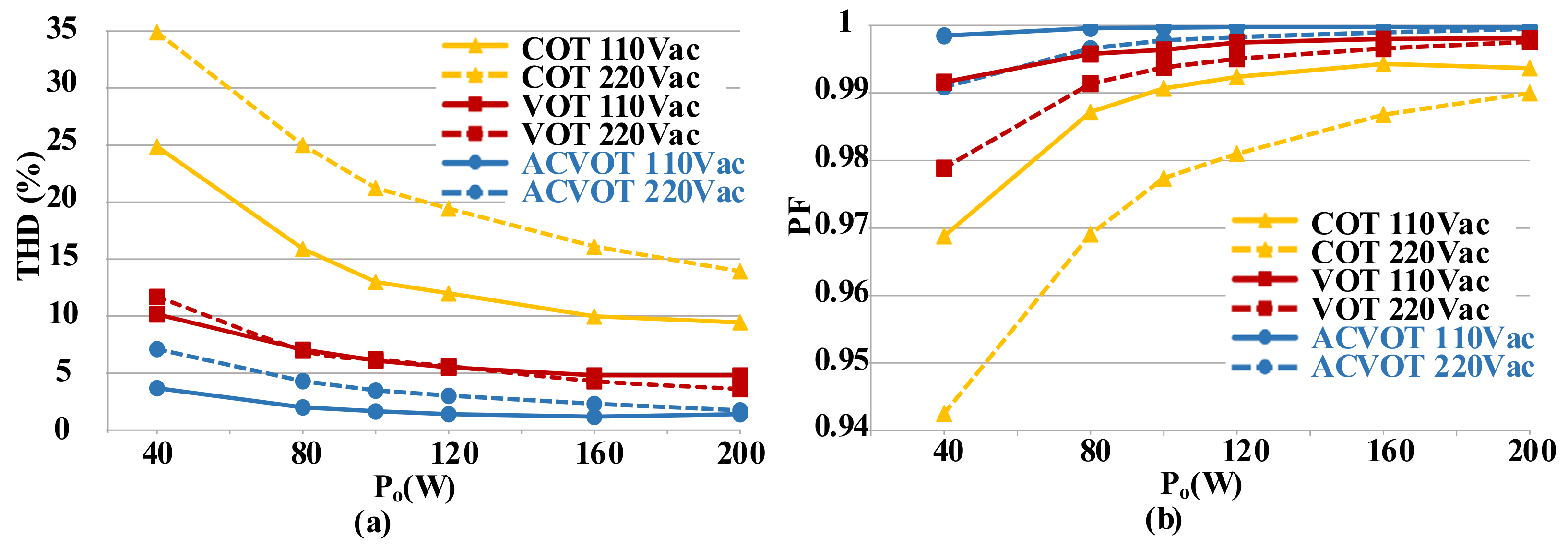
| Input current THD (at rated power) | 1.4% at 110 Vac | 3.9% at 110 Vac | 0.97% at 110 Vac | Lack of data | 4.3% at 90 Vac | 3.74% at 110 Vac |
| 1.7% at 220 Vac | Lack of data | 2.9% at 220 Vac | 5.6% at 220 Vac | 9.8% at 230 Vac | 5.5% at 220 Vac | |
| Control method | CRM, digital Real-time | CRM/DCM, analog | CRM, digital LUT-based | CRM, digital Real-time | CRM, digital Real-time | CRM, digital Real-time |
- Adding a several lines of the computing code (according to Equations (15) and (17)) in the prior control program).
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Tayar, T.; Abramovitz, A.; Shmilovitz, D. DCM Boost PFC for High Brightness LED Driver Applications. Energies 2021, 14, 5486. [Google Scholar] [CrossRef]
- Castellan, S.; Buja, G.; Menis, R. Single-phase power line conditioning with unity power factor under distorted utility voltage. Int. J. Electr. Power 2020, 121, 106057. [Google Scholar] [CrossRef]
- Gerber, D.L.; Musavi, F.; Ghatpande, O.A.; Frank, S.M.; Poon, J.; Brown, R.E.; Feng, W. A Comprehensive Loss Model and Comparison of AC and DC Boost Converters. Energies 2021, 14, 3131. [Google Scholar] [CrossRef]
- Ren, X.Y.; Zhou, Y.T.; Guo, Z.H.; Wu, Y.; Zhang, Z.L.; Chen, Q.H. Simple Analog-Based Accurate Variable On-Time Control for Critical Conduction Mode Boost Power Factor Correction Converters. IEEE J. Emerg. Sel. Top. Power 2020, 8, 4025–4036. [Google Scholar] [CrossRef]
- Liu, B.; Wu, J.J.; Li, J.; Dai, J.Y. A novel PFC controller and selective harmonics suppression. Int. J. Electr. Power 2013, 44, 680–687. [Google Scholar] [CrossRef]
- Min, R.; Tong, Q.L.; Zhang, Q.; Chen, C.; Zou, X.C.; Lv, D.A. Corrective frequency compensation for parasitics in boost power converter with sensorless current mode control. Int. J. Electr. Power 2018, 96, 274–281. [Google Scholar] [CrossRef]
- Santos, A.; Duggan, G.P.; Young, P.; Frank, S.; Hughes, A.; Zimmerle, D. Harmonic cancellation within AC low voltage distribution for a realistic office environment. Int. J. Electr. Power 2022, 134, 107325. [Google Scholar] [CrossRef]
- Marxgut, C.; Krismer, F.; Bortis, D.; Kolar, J.W. Ultraflat Interleaved Triangular Current Mode (TCM) Single-Phase PFC Rectifier. IEEE Trans. Power Electron. 2014, 29, 873–882. [Google Scholar] [CrossRef]
- Datasheet of L6562AT Transition-Mode PFC Controller. Available online: https://www.st.com/resource/en/datasheet/l6562at.pdf (accessed on 26 April 2022).
- Datasheet of UCC28063 Natural Interleaving™ Transition-Mode PFC Controller. Available online: https://www.ti.com/lit/gpn/UCC28063A (accessed on 26 April 2022).
- Su, Y.; Ni, C.; Chen, C.; Chen, Y.; Tsai, J.; Chen, K. Boundary Conduction Mode Controlled Power Factor Corrector With Line Voltage Recovery and Total Harmonic Distortion Improvement Techniques. IEEE Trans. Ind. Electron. 2014, 61, 3220–3231. [Google Scholar] [CrossRef]
- Tsai, J.C.; Chen, C.L.; Chen, Y.T.; Ni, C.L.; Chen, C.Y.; Chen, K.H.; Chen, C.J.; Pan, H.L. Perturbation on-Time (POT) Control and Inhibit Time Control (ITC) in Suppression of THD of Power Factor Correction (PFC) Design. In Proceedings of the 2011 IEEE Custom Integrated Circuits Conference (CICC), San Jose, CA, USA, 19–21 September 2011; pp. 1–4. [Google Scholar]
- Tang, S.H.; Chen, D.; Huang, C.S.; Liu, C.Y.; Liu, K.H. A new on-time adjustment scheme for the reduction of input current distortion of critical-mode power factor correction boost converters. In Proceedings of the 2010 International Power Electronics Conference—ECCE ASIA, Sapporo, Japan, 21–24 June 2010; pp. 1717–1724. [Google Scholar]
- Guo, Z.; Ren, X.; Wu, Y.; Zhang, Z.; Chen, Q. A novel simplified variable on-time method for CRM boost PFC converter. In Proceedings of the 2017 IEEE Applied Power Electronics Conference and Exposition (APEC), Tampa, FL, USA, 26–30 March 2017; pp. 1778–1784. [Google Scholar]
- Chen, Y.; Chen, Y. Line Current Distortion Compensation for DCM/CRM Boost PFC Converters. IEEE Trans. Power Electron. 2016, 31, 2026–2038. [Google Scholar] [CrossRef]
- Marxgut, C.; Biela, J.; Kolar, J.W. Interleaved Triangular Current Mode (TCM) resonant transition, single phase PFC rectifier with high efficiency and high power density. In Proceedings of the 2010 International Power Electronics Conference—ECCE ASIA, Sapporo, Japan, 21–24 June 2010; pp. 1725–1732. [Google Scholar]
- Wu, Y.; Ren, X.; Li, K.; Zhang, Z.; Chen, Q. An Accurate Variable On-time Control for 400Hz CRM Boost PFC Converters. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019; pp. 734–738. [Google Scholar]
- Ren, X.; Guo, Z.; Wu, Y.; Zhang, Z.; Chen, Q. Adaptive LUT-Based Variable On-Time Control for CRM Boost PFC Converters. IEEE Trans. Power Electron. 2018, 33, 8123–8136. [Google Scholar] [CrossRef]
- Liu, Z.; Huang, Z.; Lee, F.C.; Li, Q.; Yang, Y. Operation analysis of digital control based MHz totem-pole PFC with GaN device. In Proceedings of the 2015 IEEE 3rd Workshop on Wide Bandgap Power Devices and Applications (WiPDA), Blacksburg, VA, USA, 2–4 November 2015; pp. 281–286. [Google Scholar]
- Wang, J.; Eto, H.; Kurokawa, F. Optimal Zero-Voltage-Switching Method and Variable ON-Time Control for Predictive Boundary Conduction Mode Boost PFC Converter. IEEE Trans. Ind. Appl. 2020, 56, 527–540. [Google Scholar] [CrossRef]
- Bianco, A.; Adragna, C.; Scappatura, G. Enhanced constant-on-time control for DCM/CCM boundary boost PFC pre-regulators: Implementation and performance evaluation. In Proceedings of the 2014 IEEE Applied Power Electronics Conference and Exposition—APEC 2014, Fort Worth, TX, USA, 16–20 March 2014; pp. 69–75. [Google Scholar]
- Kim, J.; Youn, H.; Moon, G. A Digitally Controlled Critical Mode Boost Power Factor Corrector With Optimized Additional On Time and Reduced Circulating Losses. IEEE Trans. Power Electron. 2015, 30, 3447–3456. [Google Scholar] [CrossRef]
- Louganski, K.P.; Lai, J. Active Compensation of the Input Filter Capacitor Current in Single-Phase PFC Boost Converters. In Proceedings of the 2006 IEEE Workshops on Computers in Power Electronics, Troy, NY, USA, 16–19 July 2006; pp. 282–288. [Google Scholar]
- Lyu, D.; Shi, G.; Min, R.; Tong, Q.; Zhang, Q.; Li, L.; Shen, G. Extended Off-Time Control for CRM Boost Converter Based on Piecewise Equivalent Capacitance Model. IEEE Access 2020, 8, 155891–155901. [Google Scholar] [CrossRef]
- Kim, J.-W.; Yi, J.-H.; Cho, B.-H. Enhanced Variable On-time Control of Critical Conduction Mode Boost Power Factor Correction Converters. J. Power Electron. 2014, 14, 890–898. [Google Scholar] [CrossRef] [Green Version]




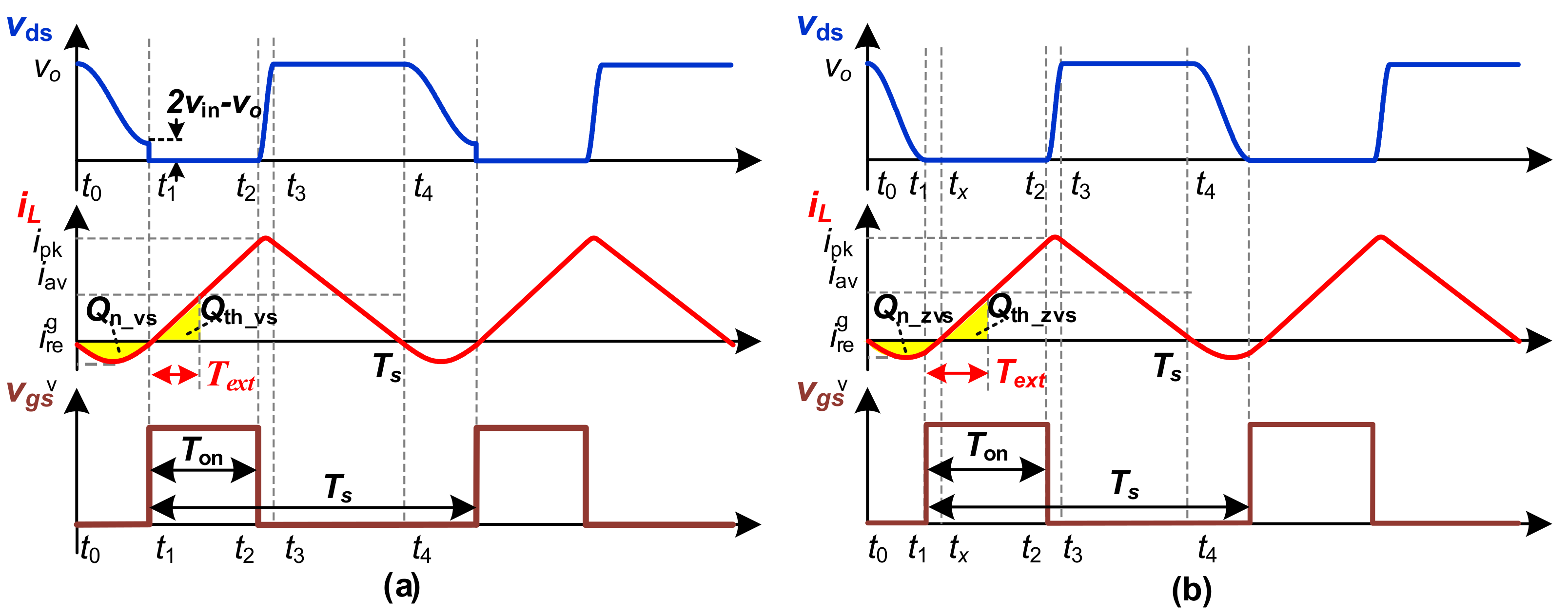






| Time Intervals | vds(t) | iL(t) |
|---|---|---|
| [t0, t1] | ||
| [t1, t2] | 0 | |
| [t2, t3] | ||
| [t3, t4] |
| Stage | The ZVS Condition | The VS Condition |
|---|---|---|
| I | ||
| II-1 | ||
| II-2 | ||
| III | ||
| IV | ||
| Stage | The ZVS Condition | The VS Condition |
|---|---|---|
| I | ||
| II-1 | ||
| II-2 | ||
| III | ||
| IV | ||
| Proposed | [22] | |||
|---|---|---|---|---|
| VS | ZVS | VS | ZVS | |
| Counts of SQRT | 1 | 1 | 1 | 2 |
| Counts of DIV | 1 | 2 | 2 | 2 |
| Counts of MUL | 1 | 3 | 5 | 7 |
| Counts of ADD | 1 | 2 | 4 | 6 |
| Clock-cycles | 62 | 70 | ||
| LUTs/Registers | 1126/5512 | 2443/9738 | ||
| Items | Values | Items | Values |
|---|---|---|---|
| Input voltage | 90–245 Vac | Lb | 287 μH |
| Output voltage | 400 Vdc | Coss | 142 pF |
| Rated power | 200 W | Cd | 38 pF |
| Power switch | GS66508T | Ceq (Coss + Cd) | 180 pF |
| Power diode | STPSC8H065 | Cin | 220 nF |
| Rectifier bridge | GBU6J | Cout | 180 μF |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Zhang, D.; Wang, W.; Zhang, F.; Yuan, J.; Liu, N. Adaptive Charge-Compensation-Based Variable On-Time Control to Improve Input Current Distortion for CRM Boost PFC Converter. Energies 2022, 15, 4021. https://doi.org/10.3390/en15114021
Liu X, Zhang D, Wang W, Zhang F, Yuan J, Liu N. Adaptive Charge-Compensation-Based Variable On-Time Control to Improve Input Current Distortion for CRM Boost PFC Converter. Energies. 2022; 15(11):4021. https://doi.org/10.3390/en15114021
Chicago/Turabian StyleLiu, Xinjun, Donglai Zhang, Wanyang Wang, Fanwu Zhang, Jun Yuan, and Ningyu Liu. 2022. "Adaptive Charge-Compensation-Based Variable On-Time Control to Improve Input Current Distortion for CRM Boost PFC Converter" Energies 15, no. 11: 4021. https://doi.org/10.3390/en15114021
APA StyleLiu, X., Zhang, D., Wang, W., Zhang, F., Yuan, J., & Liu, N. (2022). Adaptive Charge-Compensation-Based Variable On-Time Control to Improve Input Current Distortion for CRM Boost PFC Converter. Energies, 15(11), 4021. https://doi.org/10.3390/en15114021