
Coupling Analysis of Electromagnetic Vibration and Noise of FeCo-Based Permanent-Magnet Synchronous Motor


Abstract
:1. Introduction
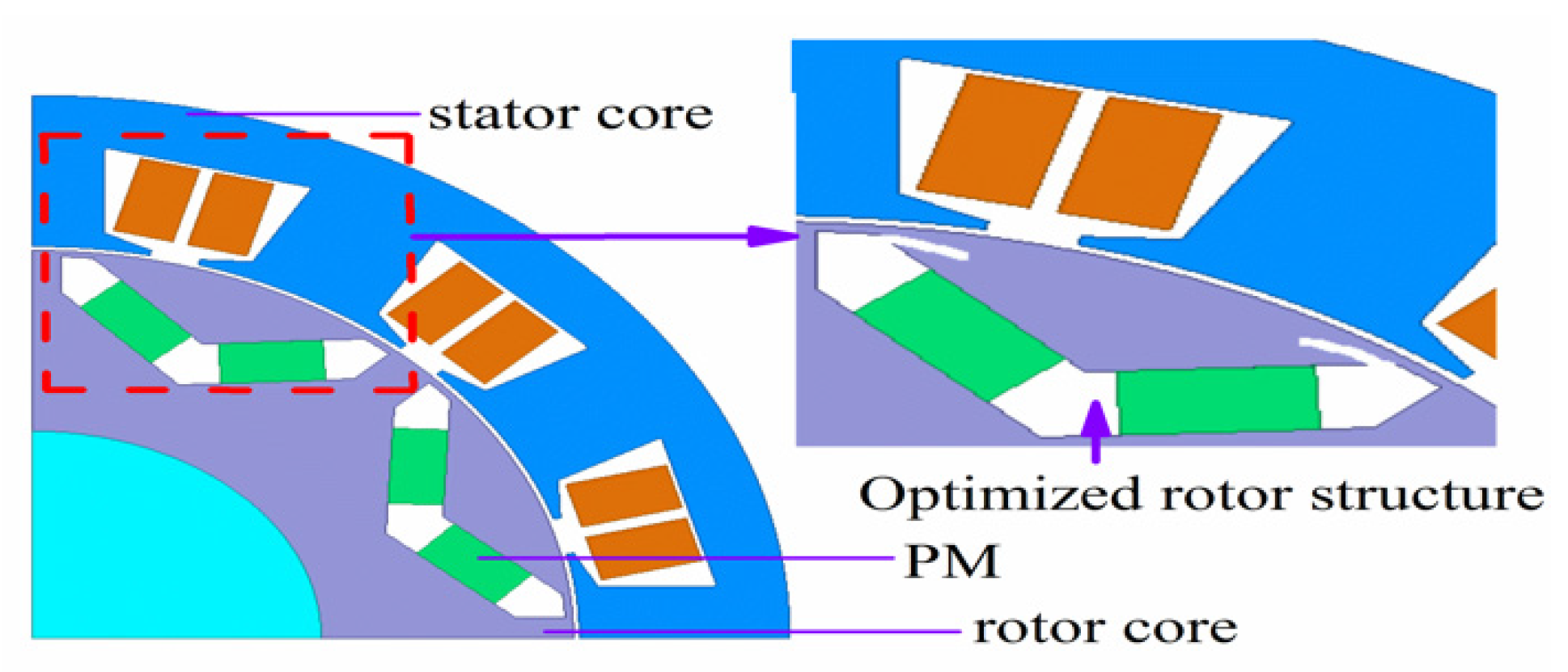
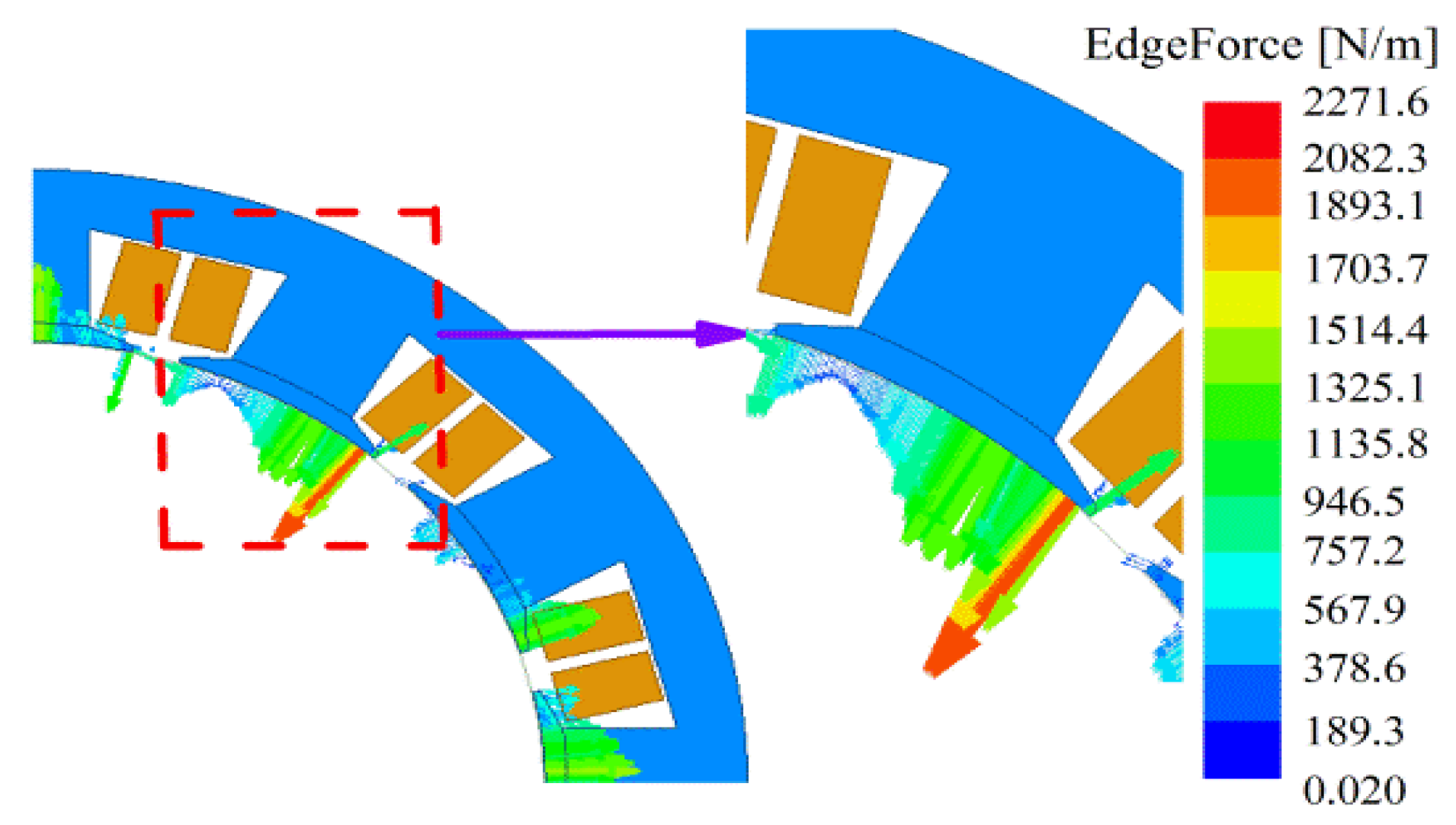
2. Motor Structure of FeCo Based Materials
3. Electromagnetic Force of PMSM
3.1. Armature Magnetic Potential of Stator Winding
3.2. Rotor’s Permanent-Magnet Magnetic Potential
3.3. Calculation of Air-Gap Permeance
3.4. Radial Electromagnetic Force Density of PMSM
3.5. Radial Electromagnetic Force of 3-Slot, 2-Pole Unit Motor
4. Spectrum of Vibration and Noise of PMSM
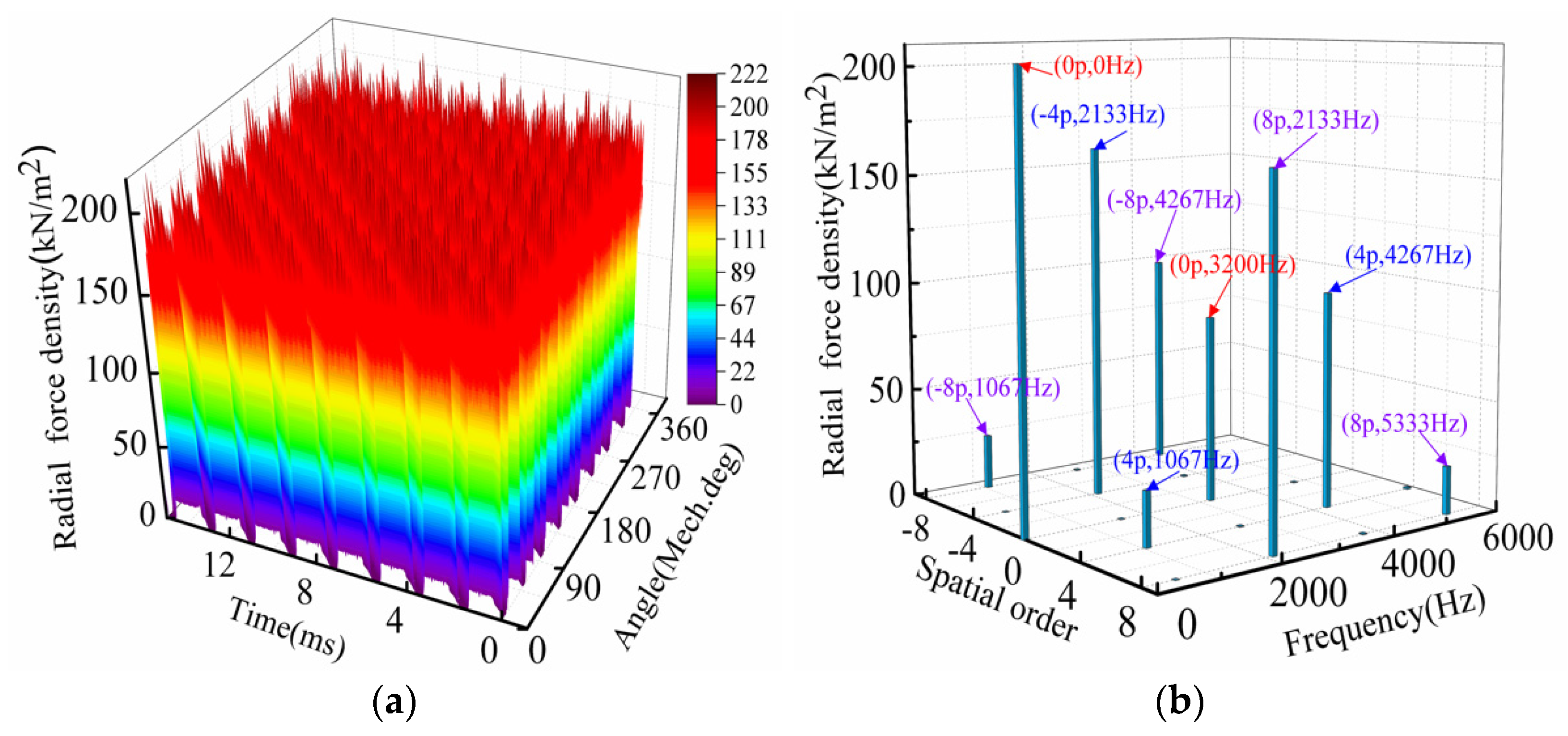
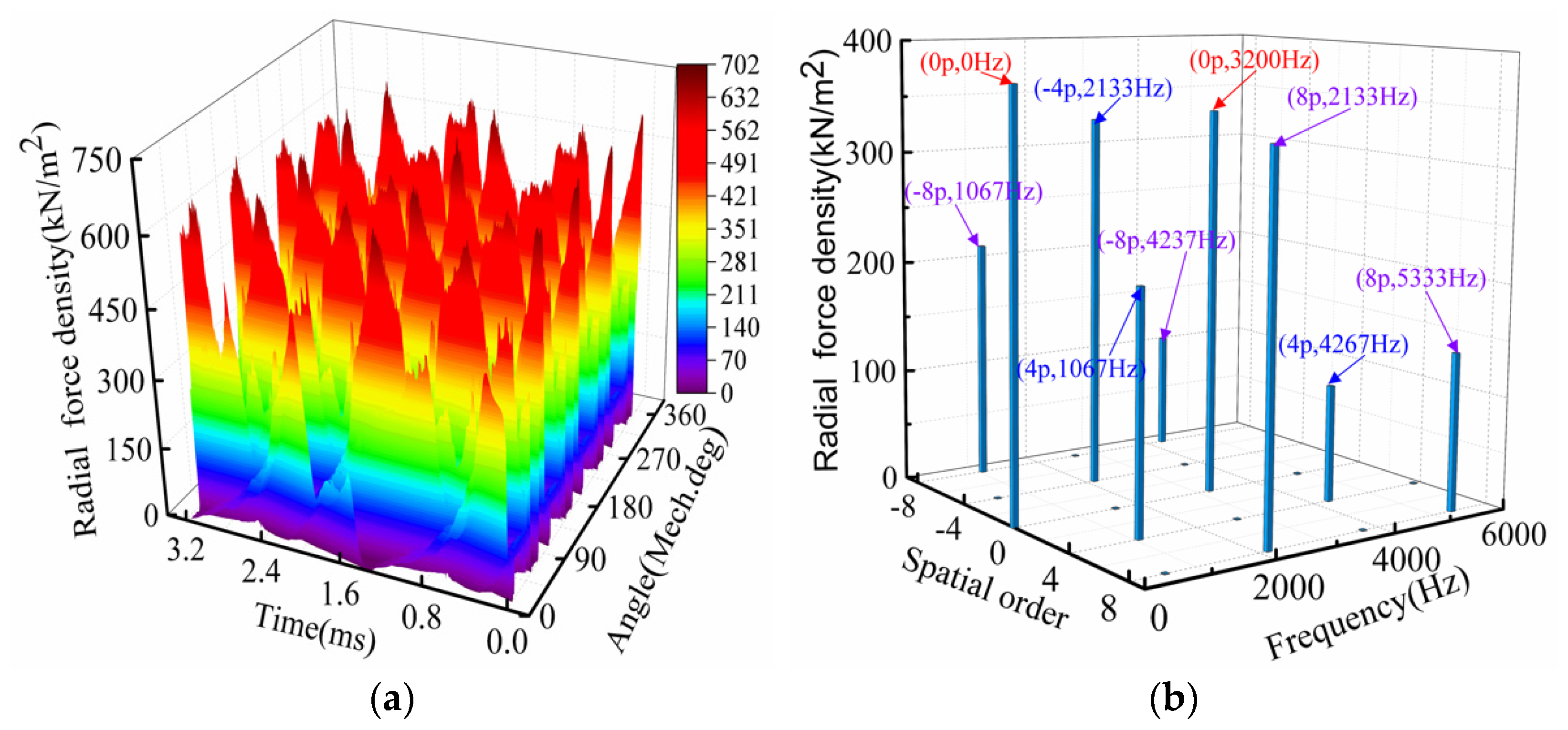
4.1. Radial Electromagnetic Force Density of PMSM
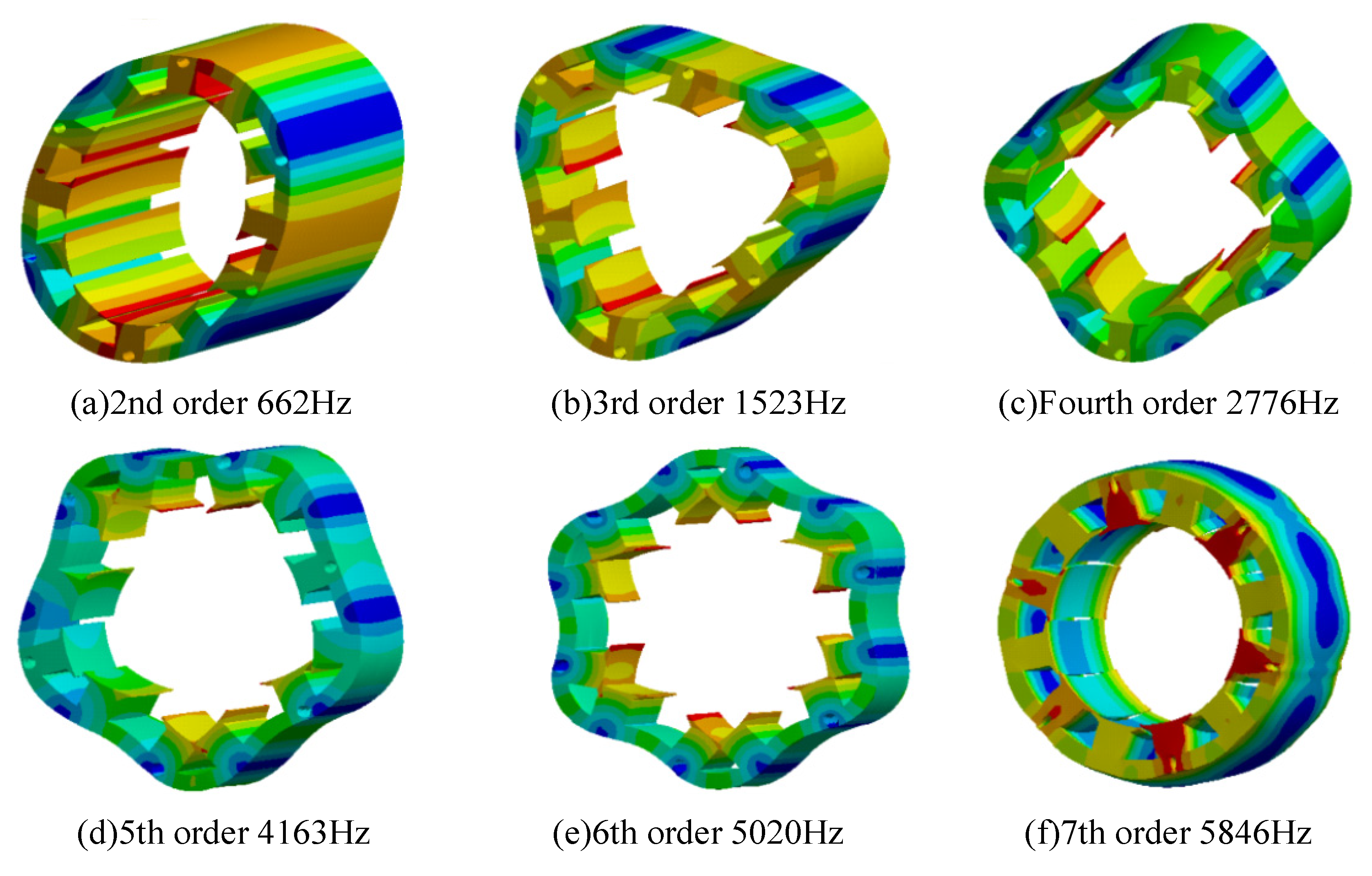
4.2. Modal Analysis of Motor Stator
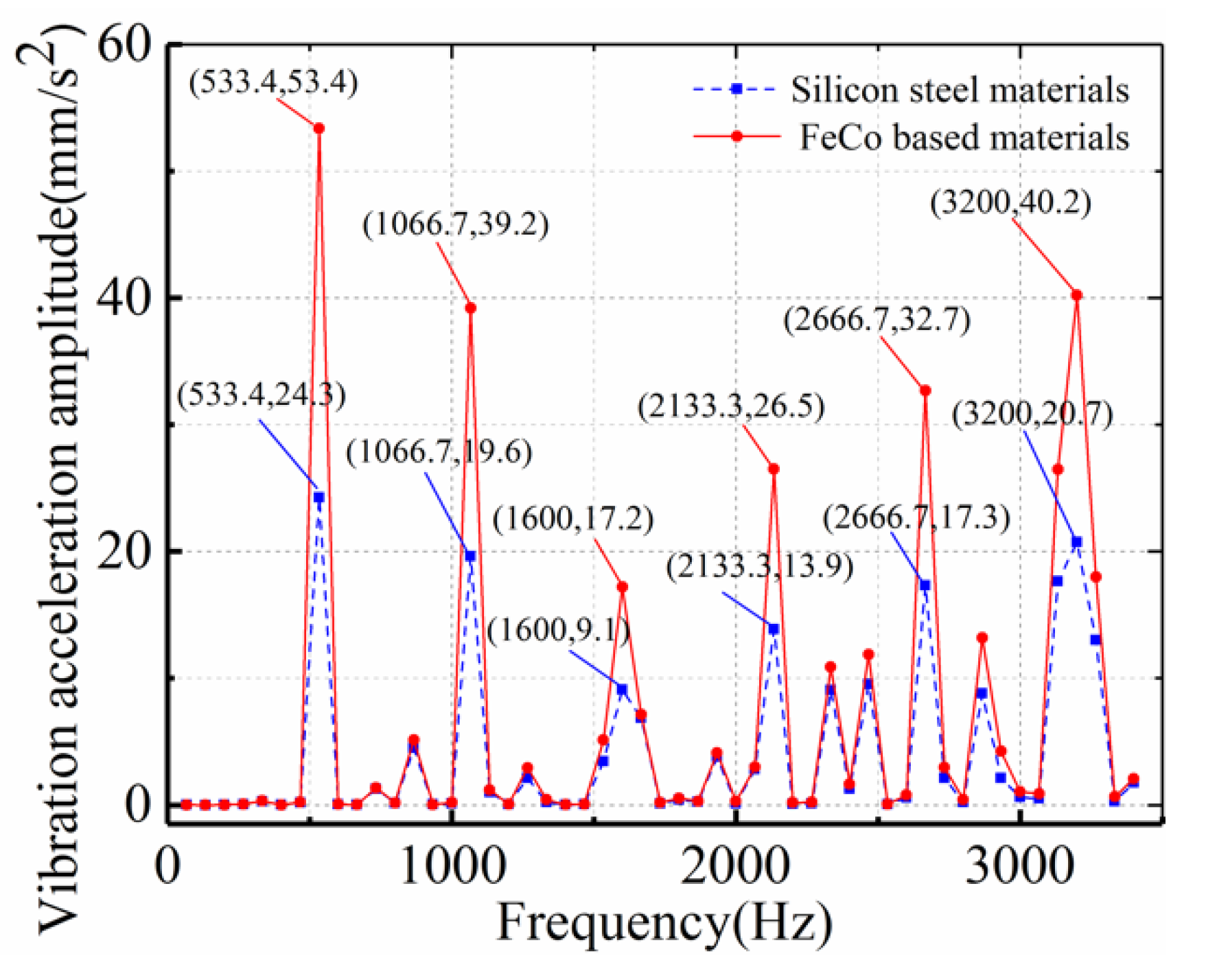
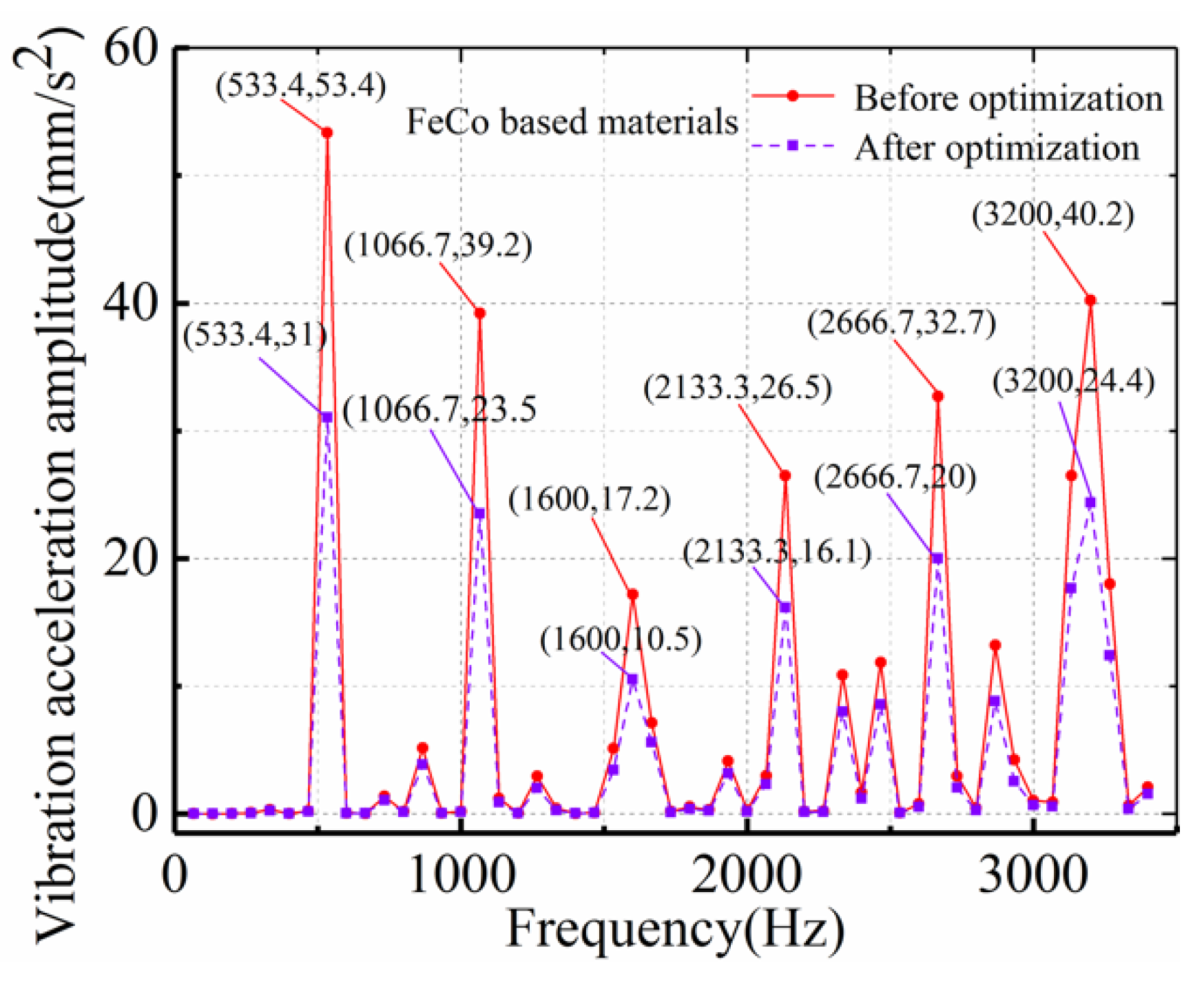
4.3. Vibration Analysis of PMSM
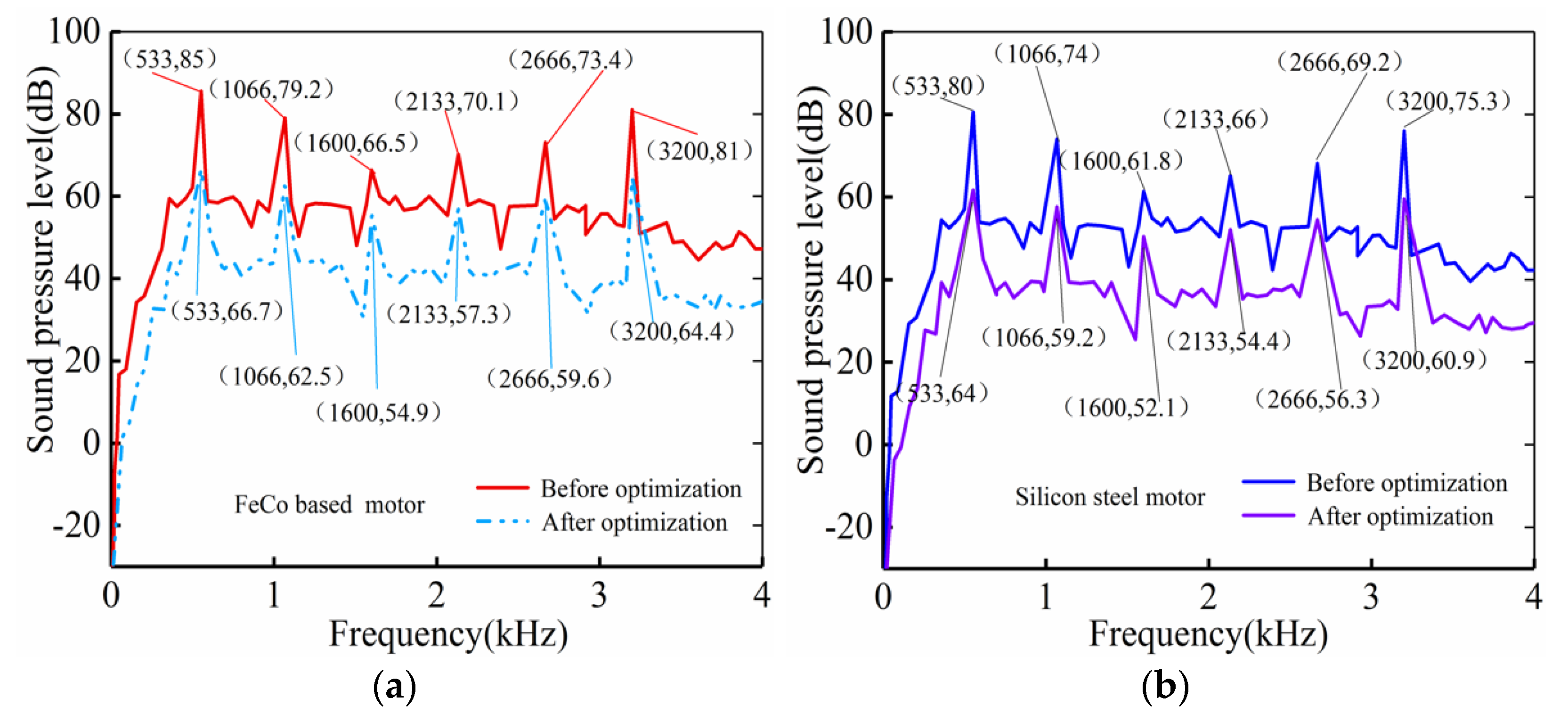
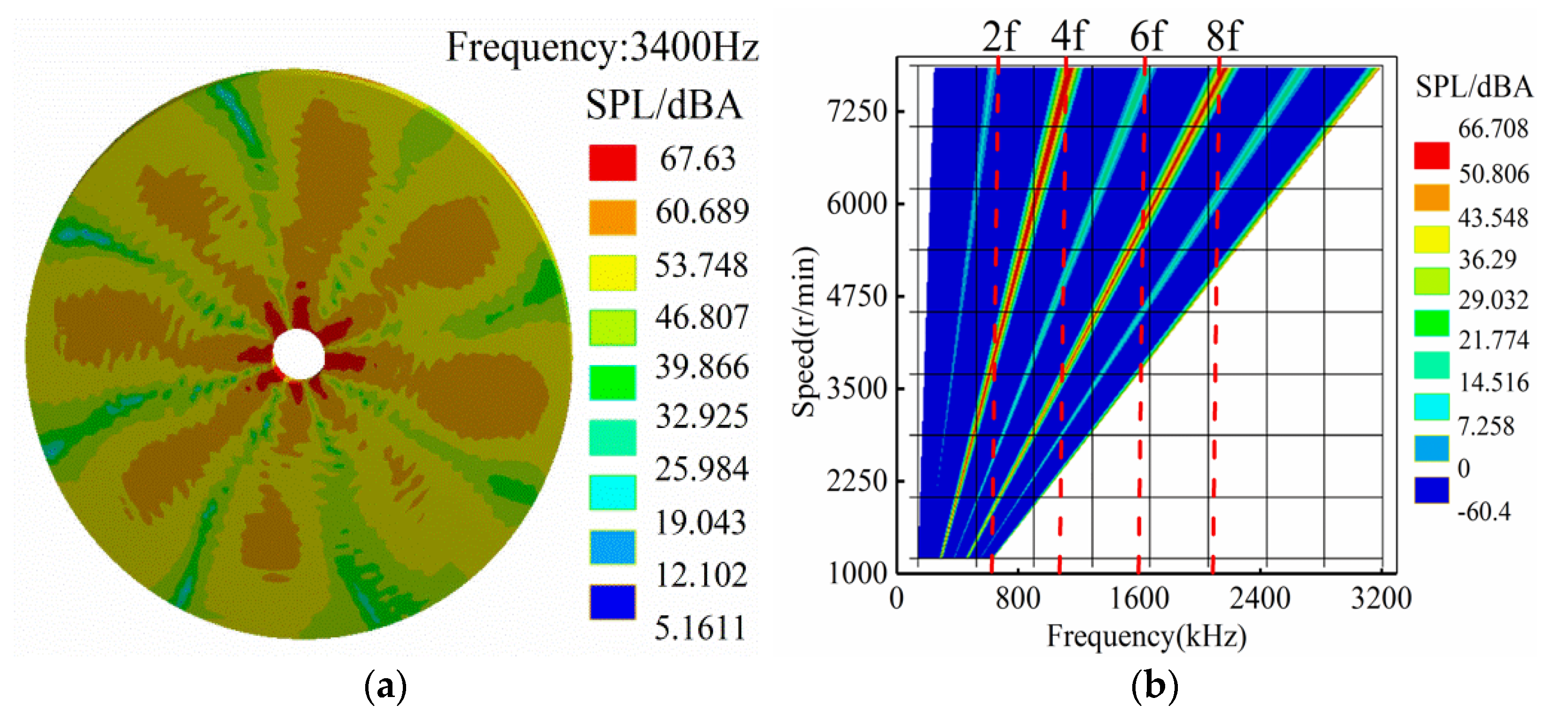
4.4. Noise Analysis of PMSM
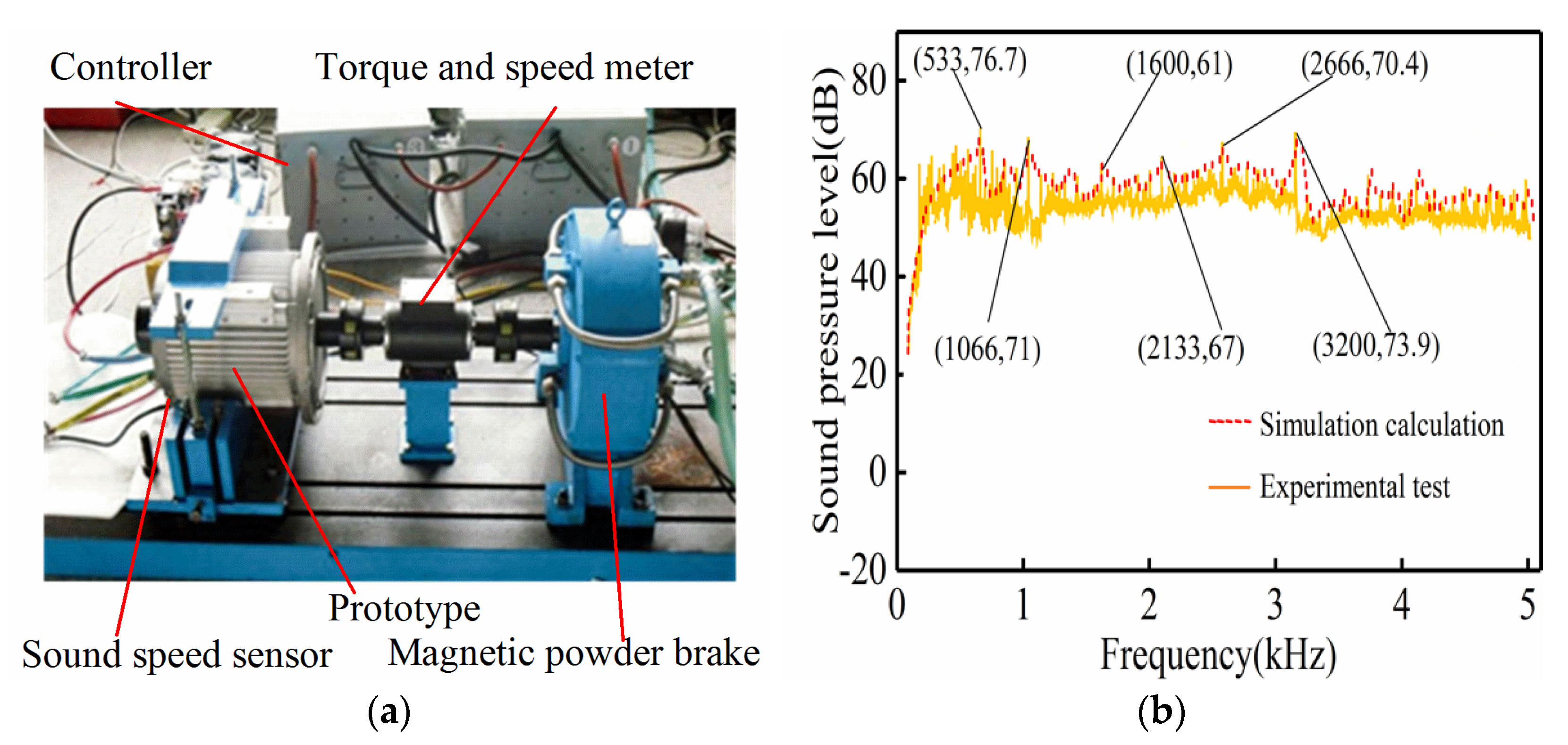
5. Verification of Prototype Experiment
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Souri, M.; Moradi Kashkooli, F.; Soltani, M.; Raahemifar, K. Effect of Upstream Side Flow of Wind Turbine on Aerodynamic Noise: Simulation Using Open-Loop Vibration in the Rod in Rod-Airfoil Configuration. Energies 2021, 14, 1170. [Google Scholar] [CrossRef]
- Zhang, Z.; Yaman, S.; Salameh, M.; Singh, S.; Chen, C.; Krishnamurthy, M. Effectiveness of Power Electronic Controllers in Mitigating Acoustic Noise and Vibration in High-Rotor Pole SRMs. Energies 2021, 14, 702. [Google Scholar] [CrossRef]
- Li, X.; Liu, C.; Mei, B.; Wei, S.; Xia, N. Vibration and noise sources analysis of IPMSM for electric vehicles in a wide-speed range. Proc. CSEE 2018, 38, 5219–5227. [Google Scholar]
- Jafarboland, M.; Farahabadi, H.B. Optimum design of the stator parameters for noise and vibration reduction in BLDC motor. IET Elect. Power Appl. 2018, 12, 1297–1305. [Google Scholar] [CrossRef]
- Kim, H.-S.; Kwon, B.-I. Optimal design of motor shape and magnetization direction to obtain vibration reduction and average torque improvement in IPM BLDC motor. IET Elect. Power Appl. 2017, 11, 378–385. [Google Scholar] [CrossRef]
- Lin, F.; Zuo, S.G.; Wu, X.D. Electromagnetic vibration and noise analysis of permanent magnet synchronous motor with different slot-pole combinations. IET Electr. Power Appl. 2016, 10, 900–908. [Google Scholar] [CrossRef]
- Deng, W.; Zuo, S. Analytical Modeling of the Electromagnetic Vibration and Noise for an External-Rotor Axial-Flux in-Wheel Motor. IEEE Trans. Ind. Electron. 2017, 65, 1991–2000. [Google Scholar] [CrossRef]
- Li, Z.; Brindak, Z.; Lei, Z. Modeling of an Electromagnetic Vibration Energy Harvester with Motion Magnification. In Proceedings of the ASME 2011 International Mechanical Engineering Congress and Exposition, Denver, CO, USA, 11–17 November 2011. [Google Scholar]
- Ting, D.; Ruiqing, W.; Jicheng, Z.; Kun, L. Influence of auxiliary slot on electromagnetic vibration in PMSM with similar slot and pole number. In Proceedings of the 2017 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, NSW, Australia, 11–14 August 2017; pp. 1–6. [Google Scholar]
- Zhou, G.Y.; Shen, J.X. Rotor Notching for Electromagnetic Noise Reduction of Induction Motors. IEEE Trans. Ind. Appl. 2017, 10, 10–13. [Google Scholar] [CrossRef]
- Hong, J.; Wang, S.; Sun, Y.; Cao, H. An effective method with copper ring for vibration reduction in permanent magnet brush DC motors. IEEE Trans. Magn. 2018, 54, 8105–8108. [Google Scholar] [CrossRef]
- Zou, J.; Lan, H.; Xu, Y.; Zhao, B. Analysis of global and local force harmonics and their effects on vibration in permanent magnet synchronous machines. IEEE Trans. Energy Convers. 2017, 32, 1523–1532. [Google Scholar] [CrossRef]
- Wu, S.L.; Zuo, S.G.; Zhang, Y.D. Optimization for electromagnetic noise reduction in claw pole alternator by rotor claw chamfering. IEEE Trans. Ind. Electron. 2018, 65, 9325–9335. [Google Scholar] [CrossRef]
- Gao, L.; Zheng, H.; Zeng, L.; Pei, R. Evaluation Method of Noise and Vibration used in Permanent Magnet Synchronous Motor in Electric Vehicle. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo (ITEC), Detroit, MI, USA, 19–21 June 2019; pp. 1–4. [Google Scholar]
- Wang, S.M.; Hong, J.F.; Sun, Y.G.; Cao, H. Analysis and reduction of electromagnetic vibration of PM brush DC motors. IEEE Trans. Ind. Appl. 2019, 55, 4605–4612. [Google Scholar] [CrossRef]
- Sun, T.; Kim, J.M.; Lee, G.H.; Hong, J.P.; Choi, M.R. Effect of Pole and Slot Combination on Noise and Vibration in Permanent Magnet Synchronous Motor. IEEE Trans. Magn. 2011, 47, 1038–1041. [Google Scholar] [CrossRef]
- Huang, S.; Aydin, M.; Lipo, T.A. Electromagnetic vibration and noise assessment for surface mounted PM machines. In Proceedings of the Power Engineering Society Summer Meeting, Vancouver, BC, Canada, 15–19 July 2001. [Google Scholar]
- Jung, J.W.; Lee, S.H.; Lee, G.H.; Hong, J.P.; Lee, D.H.; Kim, K.N. Reduction Design of Vibration and Noise in IPMSM Type Integrated Starter and Generator for HEV. IEEE Trans. Magn. 2010, 46, 2454–2457. [Google Scholar] [CrossRef]
- Lin, F.; Zuo, S.; Deng, W.; Wu, S. Modeling and analysis of electromagnetic force, vibration and noise in permanent magnet synchronous motor considering current harmonics. IEEE Trans. Ind. Electron. 2016, 63, 7455–7466. [Google Scholar] [CrossRef]
- Min, S.G.; Sarlioglu, B. Analytical solution of electromagnetic noise caused by radial force and torque variation in fractional-slot PM motors with all teeth wound. IEEE Transp. 2017, 23, 247–251. [Google Scholar]
- Zuo, S.; Lin, F.; Wu, X. Noise Analysis, Calculation, and Reduction of External Rotor Permanent-Magnet Synchronous Motor. IEEE Trans. Ind. Electron. 2015, 62, 6204–6212. [Google Scholar] [CrossRef]
- Valente, G.; Papini, L.; Formentini, A.; Gerada, C.; Zanchetta, P. Radial force control of multi-sector permanent-magnet machines for vibration suppression. IEEE Trans. 2018, 65, 5395–5405. [Google Scholar]
- Stuckmann, C. Noise & Vibration levels of modern electric motors. In Proceedings of the International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management (PCIM Europe 2016), Nuremberg, Germany, 10–12 May 2016; pp. 4242–4247. [Google Scholar]
- Qiao, M.; Jiang, C.; Zhu, Y.; Li, G. Research on design method and electromagnetic vibration of six-phase fractional-slot concentrated winding PM motor suitable for ship propulsion. IEEE Access 2016, 4, 8535–8543. [Google Scholar] [CrossRef]
- Chai, F.; Li, Y.; Pei, Y.; Li, Z. Accurate modeling and modal analysis of stator system in permanent magnet synchronous motor with concentrated winding for vibration prediction. IET Electr. Power Appl. 2018, 12, 1225–1232. [Google Scholar] [CrossRef]
- Zuo, S.G.; Liu, X.X.; Yu, M.H.; Wu, X.; Zhang, G. Numerical prediction and analysis of electromagnetic vibration in permanent magnet synchronous motor. Trans. China Electrotech. Soc. 2017, 32, 159–167. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Rated power | 30 kW | Stator diameter | 210 mm |
| Rated voltage | 194 V | Air-gap length | 1.6 mm |
| Rated current | 94 A | Rotor diameter | 150 mm |
| Rated speed | 4000 rpm | PM thickness | 7.7 mm |
| Slot/pole | 12/8 | Core length | 175 mm |
| Rotor Permanent Magnetic Field | Stator Armature Magnetic Field | PM Magnetic Field and Armature Reaction Magnetic Field | |||
|---|---|---|---|---|---|
| Order | Frequency | Order | Frequency | Order | Frequency |
| 0 | |||||
| 0 | |||||
| 0 | |||||
| Harmonic Order | Order/Frequency Multiplier | ||||||
|---|---|---|---|---|---|---|---|
| μ2 | |||||||
| μ1 | 1 | 3 | 5 | 7 | 9 | 11 | 13 |
| 1 | 0/0 2/2 | 2/2 4/4 | 4/4 6/6 | 6/6 8/8 | 8/8 10/10 | 10/10 12/12 | 12/12 14/14 |
| 3 | 0/0 6/6 | 2/2 8/8 | 4/4 10/10 | 6/6 12/12 | 8/8 14/14 | 10/10 16/16 | |
| 5 | 0/0 10/10 | 2/2 12/12 | 4/4 14/14 | 6/6 16/16 | 8/8 18/18 | ||
| 7 | 0/0 14/14 | 2/2 16/16 | 4/4 18/18 | 6/6 20/20 | |||
| 9 | 0/0 18/18 | 2/2 20/20 | 4/4 22/22 | ||||
| 11 | 0/0 22/22 | 2/2 24/24 | |||||
| 13 | 0/0 26/26 | ||||||
| Harmonic Order | Order/Frequency Multiplier | ||||||
|---|---|---|---|---|---|---|---|
| ν2 | |||||||
| ν1 | 1 | −2 | 4 | −5 | 7 | −8 | 10 |
| 1 | 0/0 2/2 | 1/2 3/0 | 3/0 5/2 | 4/2 6/0 | 6/0 8/2 | 7/2 9/0 | 9/0 11/2 |
| −2 | 0/0 4/2 | 2/2 6/0 | 3/0 7/2 | 5/2 9/0 | 6/0 10/2 | 8/2 12/0 | |
| 4 | 0/0 8/2 | 1/2 9/0 | 3/0 11/2 | 4/2 12/0 | 6/0 14/2 | ||
| −5 | 0/0 10/2 | 2/2 12/0 | 3/0 13/2 | 5/2 15/0 | |||
| 7 | 0/0 14/2 | 1/2 15/0 | 3/0 17/2 | ||||
| −8 | 0/0 16/2 | 2/2 18/0 | |||||
| 10 | 0/0 20/2 | ||||||
| Harmonic Order | Order/Frequency Multiplier | ||||||
|---|---|---|---|---|---|---|---|
| ν | |||||||
| μ | 1 | −2 | 4 | −5 | 7 | −8 | 10 |
| 1 | 0/0 2/2 | 1/2 3/0 | 3/0 5/2 | 4/2 6/0 | 6/0 8/2 | 7/2 9/0 | 9/0 11/2 |
| 3 | 2/2 4/4 | 1/4 5/2 | 1/2 7/4 | 2/4 8/2 | 4/2 10/4 | 5/4 11/2 | 7/2 13/4 |
| 5 | 4/4 6/6 | 3/6 7/4 | 1/4 9/6 | 0/6 10/4 | 2/4 12/6 | 3/6 13/4 | 5/4 15/6 |
| 7 | 6/6 8/8 | 5/8 9/6 | 3/6 11/8 | 2/8 12/6 | 0/6 14/8 | 1/8 15/6 | 3/6 17/8 |
| 9 | 8/8 10/10 | 7/10 11/8 | 5/8 13/10 | 4/10 14/8 | 2/8 16/10 | 1/10 17/8 | 1/8 19/10 |
| 11 | 10/10 12/12 | 9/12 13/10 | 7/10 15/12 | 6/12 16/10 | 4/10 18/12 | 3/12 19/10 | 1/10 21/12 |
| 13 | 12/12 14/14 | 11/14 15/12 | 9/12 17/14 | 8/14 18/12 | 6/12 20/14 | 5/14 21/12 | 3/12 23/14 |
| Low Order (Order/Frequency) | 0p/0f | 2p/2f | 4p/4f | 6p/6f | 8p/8f | 10p/10f | 12p/12f |
|---|---|---|---|---|---|---|---|
| ACM (kN/m2) | 203.504 | 91.796 | 76.542 | 56.821 | 31.467 | 21.438 | 16.819 |
| FEM (kN/m2) | 208.915 | 93.641 | 78.360 | 57.945 | 32.083 | 22.056 | 17.256 |
| Error/% | −2.59 | −1.97 | −3.48 | −1.94 | −3.19 | −2.58 | −2.53 |
| Low Order (Order/Frequency) | 0p/0f | 2p/2f | 4p/4f | 6p/6f | 8p/8f | 10p/10f | 12p/12f |
|---|---|---|---|---|---|---|---|
| ACM (kN/m2) | 459.541 | 224.648 | 170.175 | 123.812 | 92.492 | 67.064 | 48.672 |
| FEM (kN/m2) | 473.495 | 230.139 | 176.313 | 127.819 | 95.537 | 69.578 | 50.214 |
| Error/% | −2.95 | −2.38 | −3.48 | −3.13 | −3.19 | −3.61 | −3.07 |
| Parameter | FeCo-Based B800 | DW310_35 |
|---|---|---|
| Saturation magnetic induction (T) | 2.46 | 2.03 |
| Magnetostriction (×10−6) | 60 | — |
| Density (kg/m3) | 8200 | 7650 |
| Curie temperature (°C) | 980 | 746 |
| Resistivity (μΩ·m) | 0.4 | 0.45 |
| Tensile strength (MPa) | 1340 | 343 |
| Elastic modulus (GPa) | 128 | 206 |
| Coercivity (A·m−1) | ≤128 | <30 |
| Lamination coefficient | 0.88 | 0.95 |
| Spatial Order | Frequency Distribution |
|---|---|
| 0 | …, −18f, −12f, −6f, 0f, 6f, 12f, 18f, … |
| 4 | …, −14f, −8f, −2f, 4f, 10f, 16f, 22f, … |
| 8 | …, −10f, −4f, 2f, 8f, 14f, 20f, 26f, … |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hou, P.; Ge, B.; Tao, D.; Wang, Y.; Pan, B. Coupling Analysis of Electromagnetic Vibration and Noise of FeCo-Based Permanent-Magnet Synchronous Motor. Energies 2022, 15, 3888. https://doi.org/10.3390/en15113888
Hou P, Ge B, Tao D, Wang Y, Pan B. Coupling Analysis of Electromagnetic Vibration and Noise of FeCo-Based Permanent-Magnet Synchronous Motor. Energies. 2022; 15(11):3888. https://doi.org/10.3390/en15113888
Chicago/Turabian StyleHou, Peng, Baojun Ge, Dajun Tao, Yue Wang, and Bo Pan. 2022. "Coupling Analysis of Electromagnetic Vibration and Noise of FeCo-Based Permanent-Magnet Synchronous Motor" Energies 15, no. 11: 3888. https://doi.org/10.3390/en15113888
APA StyleHou, P., Ge, B., Tao, D., Wang, Y., & Pan, B. (2022). Coupling Analysis of Electromagnetic Vibration and Noise of FeCo-Based Permanent-Magnet Synchronous Motor. Energies, 15(11), 3888. https://doi.org/10.3390/en15113888