
Comparison of Selected Methods for the Stator Winding Condition Monitoring of a PMSM Using the Stator Phase Currents



Abstract
1. Introduction
2. Symptoms of the Stator Winding Fault in the Phase Current Signal
2.1. Stator Current Data Acquisition for Diagnostic Purposes
2.2. Selected Methods for the PMSM Stator Current Signal Preprocessing
3. Experimental Setup and Test Scenarios
4. Experimental Verification of the Proposed Diagnostic Methods for Detecting Shorted Turns in PMSM Stator Winding
4.1. Application of Spectral Analysis of the Stator Current Signal and the Current Envelope for ITSC Detection
4.2. Application of DWT of the Stator Current Envelope for ITSC Detection
5. Testing of the Proposed Fault Indicators of ITSCs in On-Line Operation of the Drive System
6. Conclusions
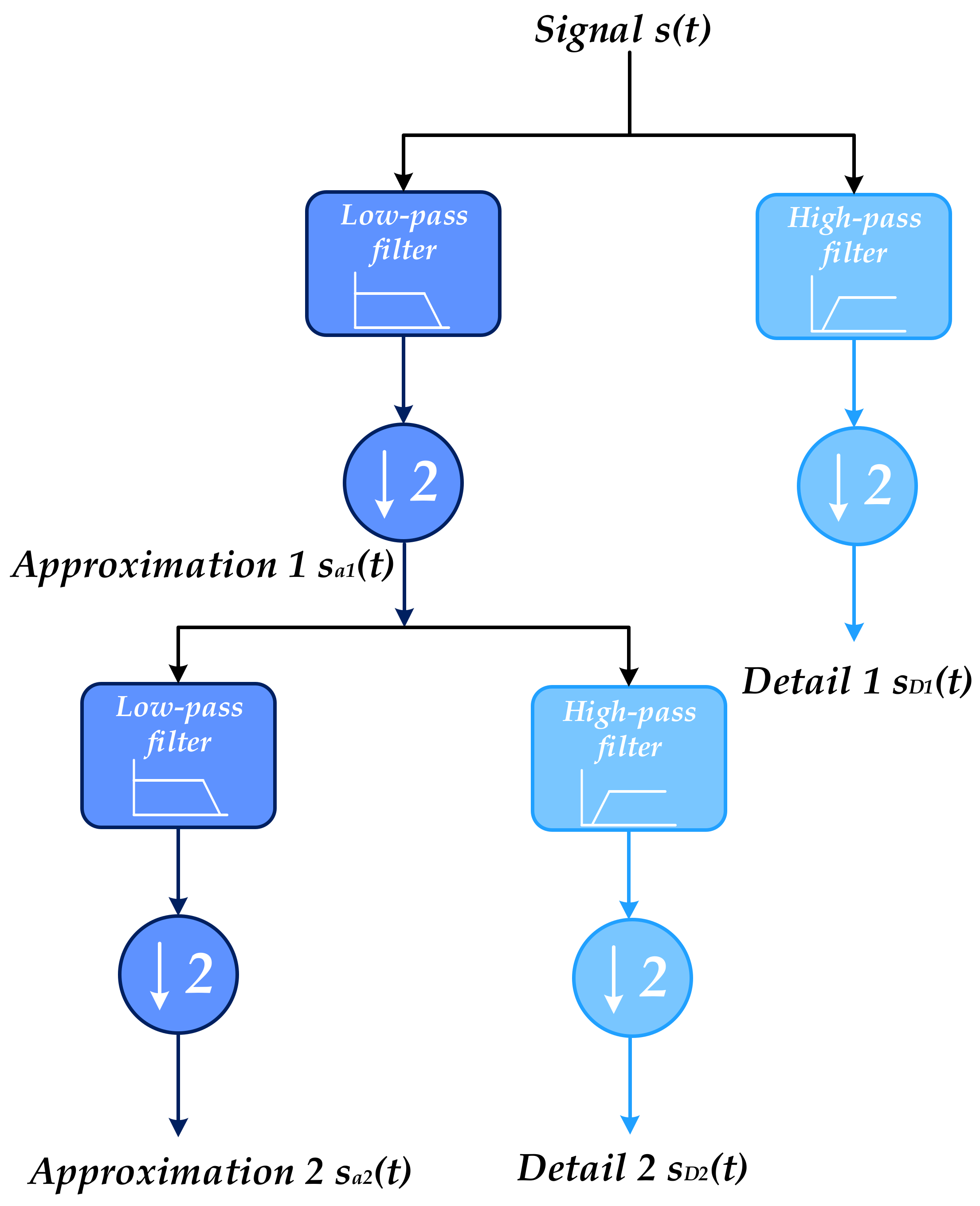
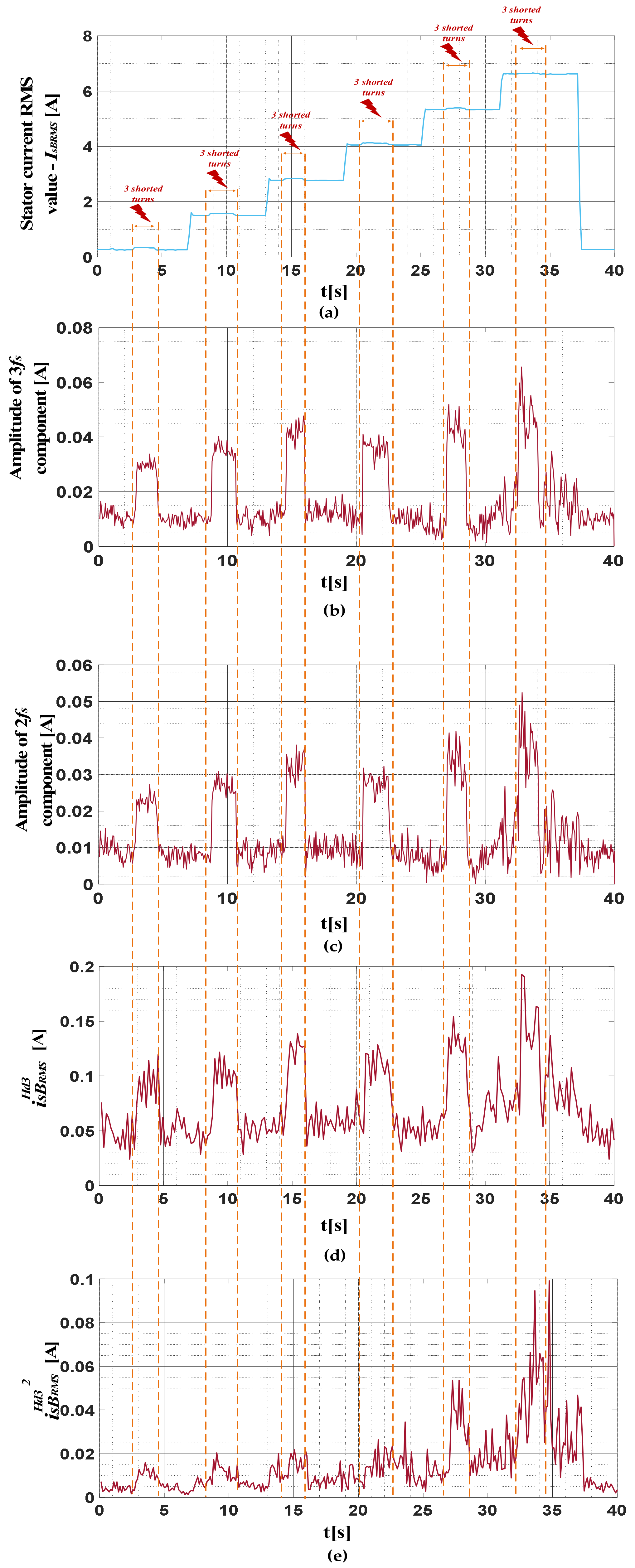
- In the case of the FFT analysis of the stator phase current, the most significant symptom of damage is an increase in the amplitude of the third harmonic—the 3fs component. The increase in the amplitude of this component causes greater fluctuations in the amplitude of the stator phase current, changing the shape of the stator phase current envelope. The FFT analysis of the envelope showed an increase in the 2fs component in the spectrum after the failure occurred. Monitoring the value of this component allows the detection of any single ITSC. The third of the analyzed methods was the DWT of the phase current envelope. Upon failure, the RMS value of the detail, which includes the 2fs component, increases significantly. It was proven that monitoring the RMS values of the third and fourth details allows detecting stator winding faults in the entire tested range of rotor speeds (supply voltage frequency) and the load torque.
- The original fault indicators (FIs) based on the observation of the aforementioned ITSC fault symptoms were described, which clearly show which symptom is most sensitive to the incipient fault of the stator winding of PMSM. After comparing the proposed FIs in online operation, it was also found that the FI3fs and FI2fs fault indicators, corresponding to 3fs and 2fs components in the stator phase current FFT and stator phase current envelope spectrum, are the most sensitive to stator winding fault. The least sensitive FI to the change of the motor load, with the simultaneous high sensitivity to damage, is the FId3RMS indicator corresponding to the RMS value of the third detail () of the DWT of the stator current envelope. The greatest increase in value with only one shorted turn occurred for the proposed damage indicator corresponding to .
- The confirmation of the effectiveness of the proposed ITSC fault indicators presented in the article and their detailed comparison may be the basis for the development of virtual diagnostic instruments. The discussed results can also be successfully used in the design of neural detectors and classifiers of damage to the stator windings of PMSM drives.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name of the Parameter | Symbol | Value | Units |
|---|---|---|---|
| Power | PN | 2500 | W |
| Torque | TN | 16 | Nm |
| Speed | NN | 1500 | r/min |
| Stator phase voltage | UsN | 325 | V |
| Stator current | IsN | 6.6 | A |
| Frequency | fsN | 100 | Hz |
| Number of pole pairs | pp | 2 | - |
| Number of stator turns | Ns | 2 × 125 | - |
References
- Slimen, S.D.; Bourogaoui, M.; Sethom, H.B.A. Easy and effective multiple faults detection and localization method for PMSM drives. In Proceedings of the 4th International Conference on Advanced Systems and Emergent Technologies (IC_ASET), Hammamet, Tunisia, 17–20 March 2019; pp. 311–316. [Google Scholar]
- Usman, A.; Doiphode, T.; Rajpurohit, B. Stator Winding Faults investigation in Permanent Magnet Synchronous Motor using Motor Signatures: Part I. In Proceedings of the EDPE, 19th International Conference on Electrical Drives & Power Electronics (EDPE), The High Tatras, Slovakia, 4–6 October 2019; pp. 160–168. [Google Scholar]
- Jiangbiao, H.; Somogyi, C.H.; Strandt, A.; Demerdash, N.A.O. Diagnosis of Stator Winding Short-Circuit Faults in an Interior Permanent Magnet Synchronous Machine. Department of Electrical and Computer Engineering. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 3125–3130. [Google Scholar]
- Cira, F.; Arkan, M.; Gümüs, B. A New Approach to Detect Stator Fault in Permanent Magnet Synchronous Motor. In Proceedings of the IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives (SDEMPED), Guarda, Portugal, 1–4 September 2015; pp. 316–321. [Google Scholar]
- Usman, A.; Joshi, B.M.; Rajpurohit, B.S. Review of fault modeling methods for permanent magnet synchronous motors and their comparison. In Proceedings of the IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives (SDEMPED), Tinos, Greece, 29 August–1 September 2017; pp. 141–146. [Google Scholar]
- Skowron, M.; Orłowska-Kowalska, T.; Wolkiewicz, M.; Kowalski, C.T. Convolutional Neural Network-based Stator Current Data-Driven Incipient Stator Fault Diagnosis of Inverter-Fed Induction Motor. Energies 2020, 13, 1475. [Google Scholar] [CrossRef]
- Krichen, M.; Elbouchikhi, E.; Benhadj, N.; Chaieb, M.; Benbouzid, M.; Neji, R. Motor Current Signature Analysis-Based Permanent Magnet Synchronous Motor Demagnetization Characterization and Detection. Machines 2020, 8, 35. [Google Scholar] [CrossRef]
- Henao, H.; Capolino, G.A.; Fernandez-Cabanas, M.; Filippetti, F.; Bruzzese, C.; Strangas, E.; Pusca, R.; Estima, J.; Riera-Guasp, M.; Hedayati-kia, S. Trends in Fault Diagnosis for Electrical Machines. IEEE Ind. Electron. Mag. 2014, 8, 31–42. [Google Scholar] [CrossRef]
- Antonino-Daviu, J.A.; Gyftakis, K.N.; Garcia-Hernandez, R.; Razik, H.; Marques Cardoso, A.J. Comparative influence of adjacent and non-adjacent broken rotor bars on the induction motor diagnosis through MCSA and ZSC methods. In Proceedings of the 41st IEEE Industrial Electronics Society (IECON), Yokohama, Japan, 9–12 November 2015; pp. 1680–1685. [Google Scholar]
- Gyftakis, K.N.; Cardoso, A.J.M. Reliable Detection of Stator Interturn Faults of Very Low Severity Level in Induction Motors. IEEE Trans. Ind. Electron. 2021, 68, 3475–3484. [Google Scholar] [CrossRef]
- Zidani, F.; Benbouzid, M.E.H.; Diallo, D.; Nait-Said, M.S. Induction motor stator faults diagnosis by a current Concordia pattern-based fuzzy decision system. IEEE Trans. Energy Convers. 2003, 18, 469–475. [Google Scholar] [CrossRef]
- Tarchała, G.; Wolkiewicz, M. Performance of the stator winding fault diagnosis in sensorless induction motor drive. Energies 2019, 12, 1507. [Google Scholar] [CrossRef]
- Wolkiewicz, M.; Tarchała, G.; Orłowska-Kowalska, T.; Kowalski, C.T. Online Stator Interturn Short Circuits Monitoring in the DFOC Induction-Motor Drive. IEEE Trans. Ind. Electron. 2016, 63, 2517–2528. [Google Scholar] [CrossRef]
- Hang, J.; Ding, S.; Zhang, J.; Cheng, M.; Chen, W.; Wang, Q. Detection of Interturn Short-Circuit Fault for PMSM With Simple Fault Indication. IEEE Trans. Energy Convers. 2016, 31, 1679–1699. [Google Scholar] [CrossRef]
- Chen, Y.; Liang, S.; Li, W.; Liang, H.; Wang, C.H. Faults and Diagnosis Methods of Permanent Magnet Synchronous Motors: A Review. Appl. Sci. 2019, 9, 2116. [Google Scholar] [CrossRef]
- Urresty, J.; Riba, J.; Romeral, L.; Rosero, J.; Serna, J. Stator Short Circuits Detection in PMSM by means of Hilbert-Huang transform and Energy calculation. In Proceedings of the IEEE International Symposium on Diagnostics for Electric Machines, Cargese, France, 31 August–3 September 2009. [Google Scholar]
- Alvarez-Gonzalez, F.; Griffo, A.; Wang, B. Permanent magnet synchronous machine stator windings fault detection by Hilbert-Huang transform. In Proceedings of the International Conference on Power Electronics, Machines and Drives, Liverpool, UK, 17–19 April 2018; pp. 3505–3509. [Google Scholar]
- Guefack, F.L.T.; Kiselev, A.; Kuznietsov, A. Improved Detection of Inter-turn Short Circuit Faults in PMSM Drives using Principal Component Analysis. In Proceedings of the International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Amalfi, Italy, 20–22 June 2018; pp. 154–159. [Google Scholar]
- Singh, A.K. Condition Monitoring and Fault Diagnosis Techniques of Electric Machines. In Proceedings of the International Conference on Recent Developments in Control, Automation & Power Engineering (RDCAPE), Noida, India, 10–11 October 2019; pp. 594–599. [Google Scholar]
- Benkedjouh, T.; Noureddine, Z.; Rechak, S. Deep Learning for Fault Diagnosis based on short-time Fourier transform. In Proceedings of the International Conference on Smart Communications in Network Technologies (SaCoNeT), El Qued, Algeria, 27–31 October 2018; pp. 288–293. [Google Scholar]
- Maqsood, A.; Oslebo, D.; Corzine, K.; Parsa, L.; Ma, Y. STFT Cluster Analysis for DC Pulsed Load Monitoring and Fault Detection on Naval Shipboard Power Systems. IEEE Trans. Transp. Electrif. 2020, 6, 821–831. [Google Scholar] [CrossRef]
- Park, C.H.; Lee, J.; Ahn, G.; Youn, M.; Youn, B.D. Fault Detection of PMSM under Non-Stationary Conditions Based on Wavelet Transformation Combined with Distance Approach. In Proceedings of the IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives (SDEMPED), Toulouse, France, 27–30 August 2019; pp. 88–93. [Google Scholar]
- Ping, Z.A.; Juan, Y.; Ling, W. Fault Detection of Stator Winding Interturn Short Circuit in PMSM Based on Wavelet Packet Analysis. In Proceedings of the Fifth International Conference on Measuring Technology and Mechatronics Automation, Hong Kong, China, 16–17 January 2013; pp. 566–569. [Google Scholar]
- Hang, J.; Zhang, J.; Xia, M.; Ding, S.H.; Hua, W. Interturn Fault Diagnosis for Model-Predictive-Controlled-PMSM Based on Cost Function and Wavelet Transform. IEEE Trans. Power Electron. 2020, 35, 6405–6418. [Google Scholar] [CrossRef]
- Obeid, N.H.; Boileu, T.; Nahid-Mobakarakch, B. Identification and localization of incipient intermittent inter-turn fault in the stator of a three phase permanent magnet synchronous motor. In Proceedings of the IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives (SDEMPED), Tinos, Greece, 29 August–1 September 2017; pp. 173–180. [Google Scholar]
- Heydarzadeh, H.; Zafarani, M.; Akin, B.; Nourani, M. Automatic fault diagnosis in PMSM using adaptive filtering and wavelet transform. In Proceedings of the IEEE International Electric Machines & Drives (IEMDC), Miami, FL, USA, 21–24 May 2017. [Google Scholar]
- Rosero, J.; Romeral, L.; Ortega, J.A.; Rosero, E. Short-Circuit Detection by Means of Empirical Mode Decomposition and Wigner-Ville Distribution for PMSM Running Under Dynamic Condition. IEEE Trans. Ind. Electron. 2009, 56, 4534–4547. [Google Scholar] [CrossRef]
- Huang, S.; Aggarwal, A.; Strangas, E.; Li, K.; Niu, F.; Huang, X. Robust Stator Winding Faults Detection in PMSMs with Respect to Current Controller Bandwith. IEEE Trans. Power Electron. 2020, 10, 1109. [Google Scholar]
- Liang, Y. Diagnosis of inter-turn short-circuit stator Winding fault in PMSM based on stator current and noise. In Proceedings of the IEEE International Conference on Industrial Technology, Busan, Korea, 26 February–1 March 2014; pp. 138–142. [Google Scholar]
- Kyeong-Hwa, K. Simple Online Fault Detecting Scheme for Short-Circuited Turn in a PMSM Through Current Harmonic Monitoring. IEEE Trans. Ind. Electron. 2011, 58, 2565–2568. [Google Scholar]
- Li, Y.; Liang, Y. The Correlaction Analysis of PM Inter-turn Fault based on Stator Current and Vibration Signal. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Beijing, China, 2–5 August 2015; pp. 1733–1737. [Google Scholar]
- Hang, J.; Zhang, J.; Cheng, M. Detection and Discrimination of Open Phase Fault in Permanent Magnet Synchronous Motor Drive System. IEEE Trans. Power Electron. 2016, 31, 4697–4709. [Google Scholar] [CrossRef]
- Faiz, J.; Exiri, S.A.H. Short-circuit fault diagnosis in permanent magnet synchronous motors—An overview. In Proceedings of the Intl Aegean Conference on Electrical Machines & Power Electronics (ACEMP), Side, Turkey, 2–4 September 2015; pp. 18–26. [Google Scholar]
- Mercorelli, P. Parameters identification in a permanent magnet three-phase synchronous motor of a city-bus for an intelligent drive assistant. Int. J. Model. Identif. Control 2014, 21, 352–361. [Google Scholar] [CrossRef]
- Bednarz, S.A.; Dybkowski, M.; Wolkiewicz, M. Identification of the stator faults in the induction motor drives using parameter estimator. In Proceedings of the 18th IEEE International Power Electronics and Motion Control Conference (PEMC), Budapest, Hungary, 26–30 August 2018; pp. 688–693. [Google Scholar]
- Refaat, S.S.; Abu-Rub, H.; Saad, M.S.; Aboul-Zahab, E.M.; Iqbal, A. Discrimination of stator winding turn fault and unbalanced supply voltage in permanent magnet synchronous motor using ANN. In Proceedings of the 4th International Conference on Power Engineering, Energy and Electrical Drives, Istanbul, Turkey, 13–17 May 2013; pp. 858–863. [Google Scholar]
- Haddad, R.Z.; Strangas, E.G. Fault detection and classification in permanent magnet synchronous machines using Fast Fourier Transform and Linear Discriminant Analysis. In Proceedings of the 9th IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives (SDEMPED), Valencia, Spain, 27–30 August 2013; pp. 99–104. [Google Scholar]
- Zhaoxia, X.; Hongwei, F. Stator Winding Inter-Turn Short Circuit and Rotor Eccentricity Diagnosis of Permanent Magnet Synchronous Generator. In Proceedings of the Control, Automation and Systems Engineering (CASE), Singapore, 30–31 July 2011; pp. 1–4. [Google Scholar]
- Rosero, J.A.; Romeral, L.; Cusido, J.; Garcia, A.; Ortega, J.A. On the short-circuiting Fault Detection in a PMSM by means of Stator Current Transformations. In Proceedings of the IEEE Power Electronics Specialists Conference, Orlando, FL, USA, 17–21 June 2007; pp. 1936–1941. [Google Scholar]
- Bouchareb, C.; Nait Said, M.S. PMSM Model with Phase-to-Phase Short-Circuit and Diagnosis by ESA and EPVA. Power Eng. Electr. Eng. 2016, 14, 522–530. [Google Scholar] [CrossRef]
- Zhang, J.; Tounzi, A.; Benabou, A.; Le Manach, Y. Detection of magnetization loss in a PMSM with Hilbert Huang transform applied to non-invasive search coil voltage. Math. Comput. Simul. 2021, 184, 184–195. [Google Scholar] [CrossRef]
- Rosero, J.; Cusido, J.; Espinosa, A.G.; Ortega, J.A.; Romeral, L. Broken Bearings Fault Detection for a Permanent Magnet Synchronous Motor under non-constant working conditions by means of a Joint Time Frequency Analysis. In Proceedings of the IEEE International Symposium on Industrial Electronics, Vigo, Spain, 4–7 June 2007; pp. 3415–3419. [Google Scholar]
- Yang, J.; Ye, H.; Zhou, W. A Review of Permanent Magnet Synchronous Motor Fault Diagnosis. In Proceedings of the IEEE Conference and Expo Transportation Electrification, Asia-Pacific, Beijing, China, 31 August–3 September 2014; pp. 1–5. [Google Scholar]
- Obeid, N.H.; Battiston, A.; Boileau, T.; Mobarakeh-Nahid, B. Early Intermittent Interturn Fault Detection and Localization for a Permanent Magnet Synchronous Motor of Electrical Vehicles Using Wavelet Transform. IEEE Trans. Transp. Electrif. 2017, 3, 694–702. [Google Scholar] [CrossRef]
- Olkkonen, J.T. Discrete Wavelet Transforms–Theory and Applications; InTech: Rijeka, Croatia, 2011. [Google Scholar]
- Sifuzzaman, M.; Islam, M.; Ali, M. Application of wavelet transform and its advantages compared to Fourier transform. J. Phys. Sci. 2009, 13, 121–134. [Google Scholar]
- Cira, F.; Arkan, M.; Gümüs, B.; Goktas, T. Analysis of Stator Inter-turn Short-circuit Fault Signatures for Inverter-fed Permanent Magnet Synchronous Motors. In Proceedings of the IEEE Industrial Electronics Society (IECON), Florence, Italy, 24–27 October 2016; pp. 1453–1457. [Google Scholar]
- Mercorelli, P.; Kubasiak, N.; Liu, S. Multilevel bridge governor by using model predictive control in wavelet packets for tracking trajectories. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; pp. 4079–4084. [Google Scholar]
- Dautov, Ç.P.; Özerdem, M.S. Wavelet transform and signal denoising using Wavelet method. In Proceedings of the 26th Signal Processing and Communications Applications Conference (SIU), Izmir, Turkey, 2–5 May 2018; pp. 1–4. [Google Scholar]
- Cusidó Roura, J.; Martínez, J.L.R. Transient Analysis and Motor Fault Detection using the Wavelet Transform. In Discrete Wavelet Transforms-Theory and Applications; Juuso, T., Ed.; InTech: Rijeka, Croatia, 2011; pp. 43–60. [Google Scholar]





















| Name of the Parameter | Frequency Band |
|---|---|
| Detal level 1—d1 | 512 Hz–1024 Hz |
| Detal level 2—d2 | 256 Hz–512 Hz |
| Detal level 3—d3 | 128 Hz–256 Hz |
| Detal level 4—d4 | 64 Hz–128 Hz |
| Detal level 5—d5 | 32 Hz–64 Hz |
| Approximation level 5—a5 | 0 Hz–32 Hz |
| Stator Winding Fault Indicator (FI) | Fault Detection Efficiency Indicator—FDEFF | FDEFF-AVG | |||||
|---|---|---|---|---|---|---|---|
| T = 0 | T = 0.2TN | T = 0.4TN | T = 0.6TN | T = 0.8TN | T = TN | ||
| 3.0638 | 3.6909 | 3.5935 | 3.7429 | 4.5571 | 4.0008 | 3.7748 | |
| 2.8170 | 3.5952 | 3.2566 | 3.4860 | 4.8047 | 3.6886 | 3.6080 | |
| 2.1931 | 2.3886 | 2.1454 | 1.8830 | 2.3775 | 1.897 | 2.1471 | |
| 3.0743 | 3.8996 | 4.0082 | 2.1061 | 3.3800 | 2.9350 | 3.2339 | |
| Stator Winding Fault Indicator (FI) | S | |
|---|---|---|
| 0.4918 | 1.6334 | |
| 0.6637 | 1.655 | |
| 0.2217 | 1.549 | |
| 0.7001 | 4.951 |
| Stator Winding Fault Indicator (FI) | Fault Detection Efficiency Index—FDEFF-Nsh | |||
|---|---|---|---|---|
| Nsh = 1 | Nsh = 2 | Nsh = 3 | Nsh = 4 | |
| 2.2196 | 3.6909 | 7.4197 | 9.1990 | |
| 2.1258 | 2.8767 | 5.885 | 9.0113 | |
| 1.3246 | 1.7758 | 2.725 | 3.2391 | |
| 2.8747 | 3.293 | 3.5006 | 3.5251 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pietrzak, P.; Wolkiewicz, M. Comparison of Selected Methods for the Stator Winding Condition Monitoring of a PMSM Using the Stator Phase Currents. Energies 2021, 14, 1630. https://doi.org/10.3390/en14061630
Pietrzak P, Wolkiewicz M. Comparison of Selected Methods for the Stator Winding Condition Monitoring of a PMSM Using the Stator Phase Currents. Energies. 2021; 14(6):1630. https://doi.org/10.3390/en14061630
Chicago/Turabian StylePietrzak, Przemyslaw, and Marcin Wolkiewicz. 2021. "Comparison of Selected Methods for the Stator Winding Condition Monitoring of a PMSM Using the Stator Phase Currents" Energies 14, no. 6: 1630. https://doi.org/10.3390/en14061630
APA StylePietrzak, P., & Wolkiewicz, M. (2021). Comparison of Selected Methods for the Stator Winding Condition Monitoring of a PMSM Using the Stator Phase Currents. Energies, 14(6), 1630. https://doi.org/10.3390/en14061630