
Effectiveness Analysis of PMSM Motor Rolling Bearing Fault Detectors Based on Vibration Analysis and Shallow Neural Networks




Abstract
1. Introduction
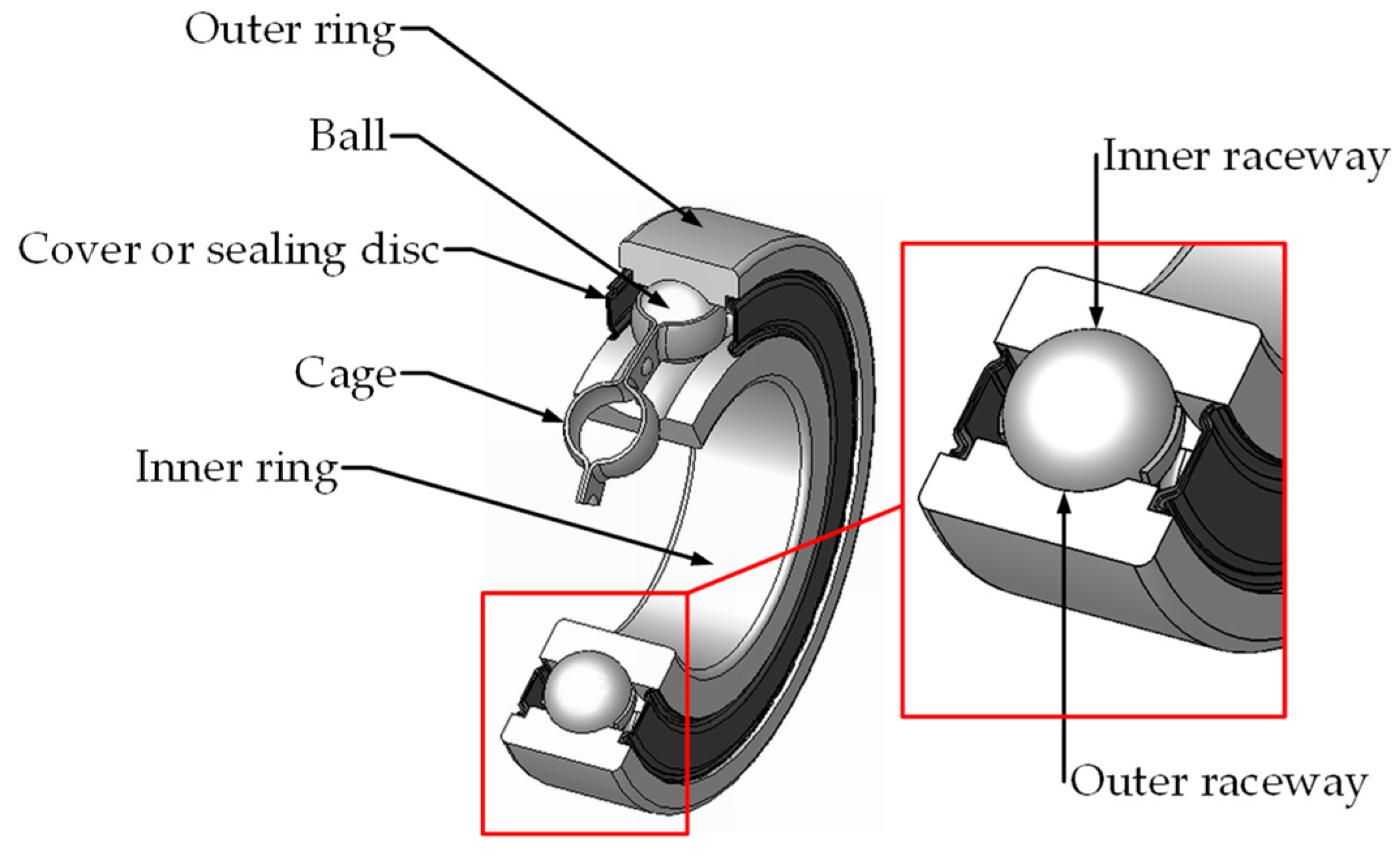
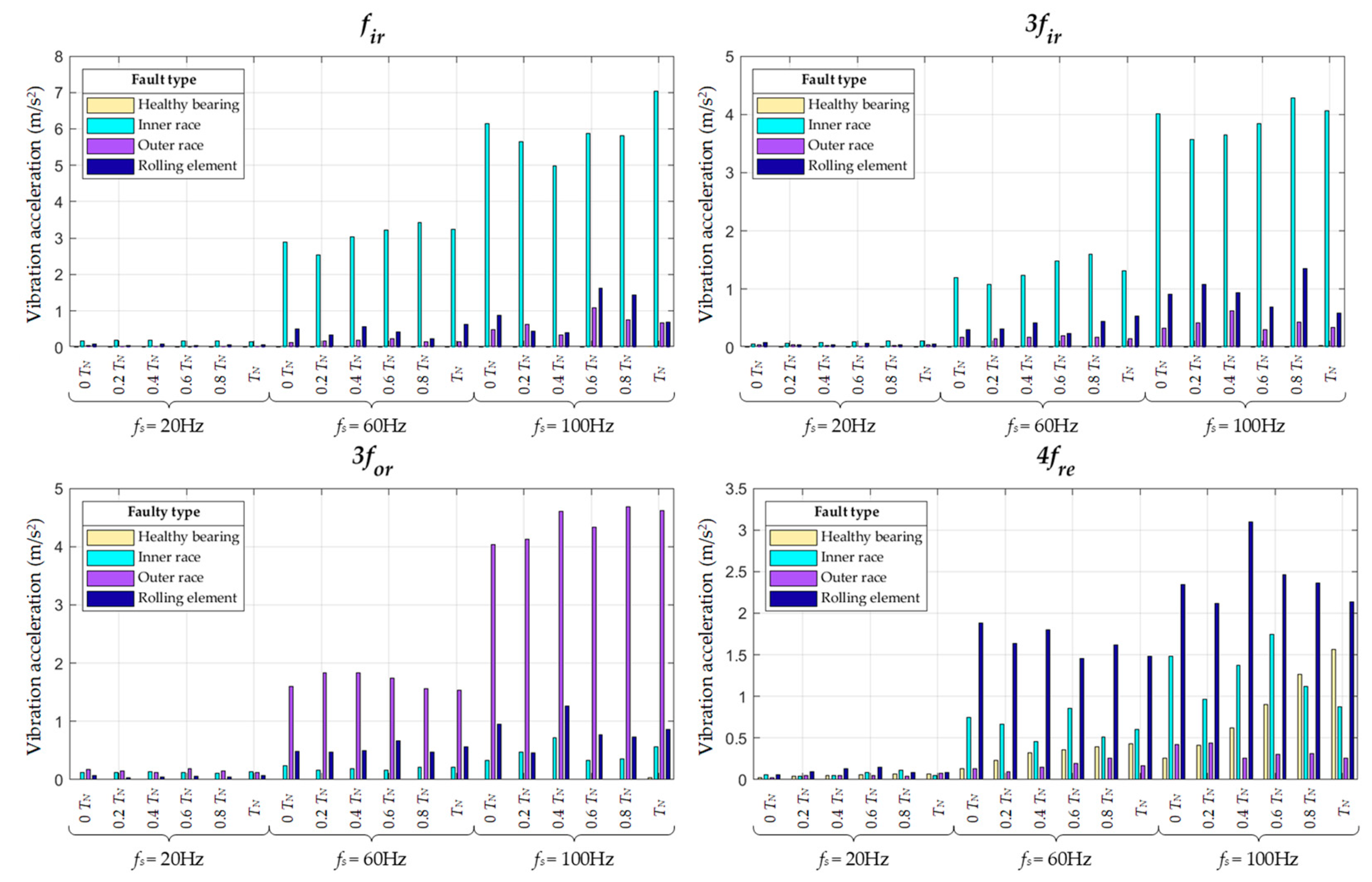
2. Brief Characteristic of Bearing Failure Symptoms
- Point damages (cavities, splinters of small fragments);
- Diffuse damages (surface deformation, corrosion damage, unevenness).
3. Methods Used for Failure Symptoms Analysis in the Vibration Signal
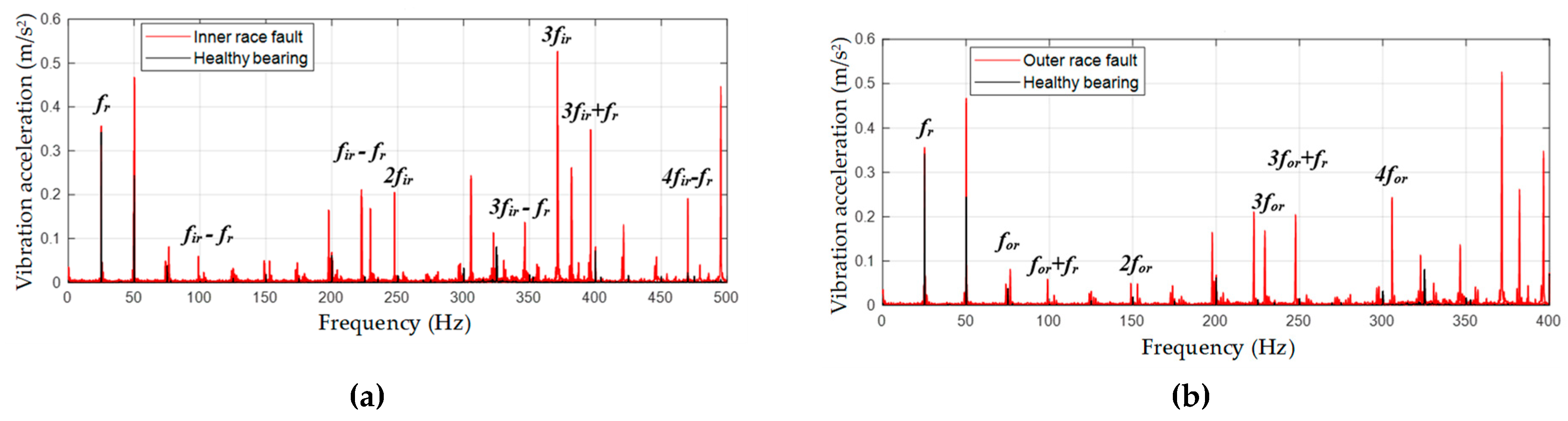
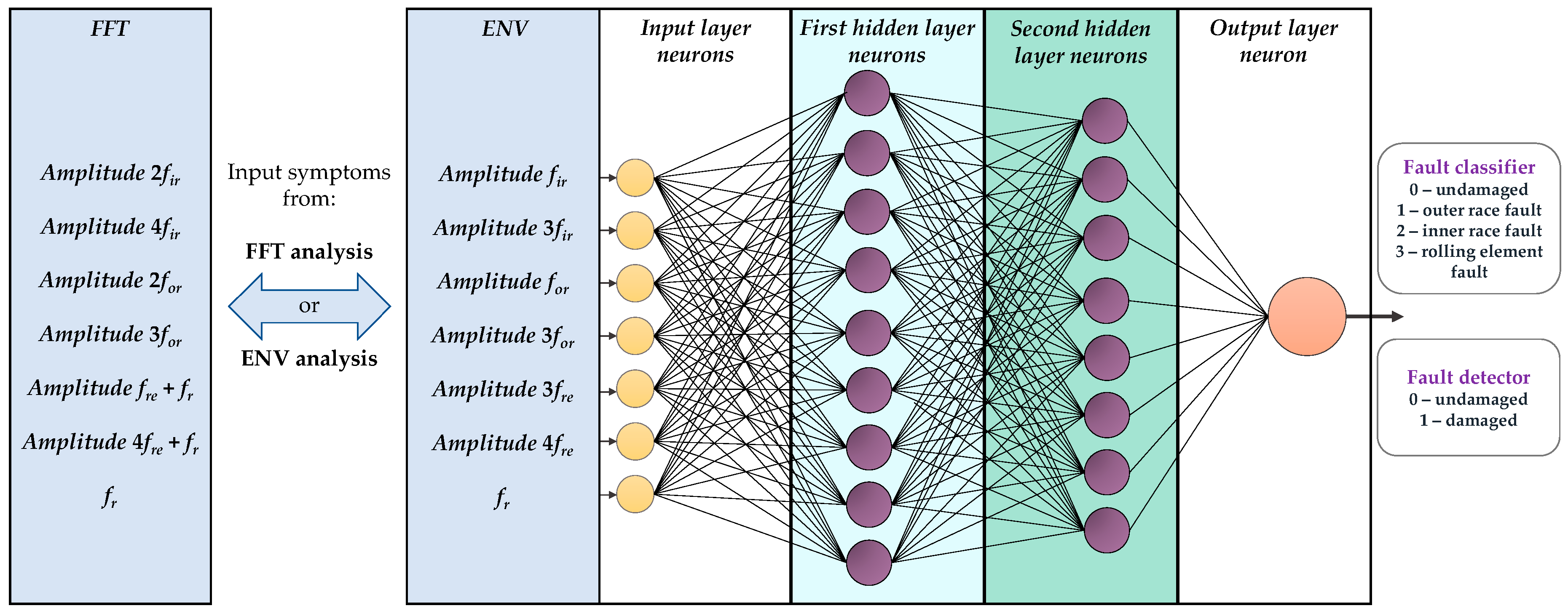
3.1. Fast Fourier Transform
3.2. Hilbert Transform
4. Neural Network Structures Used
4.1. Multilayer Perceptrons
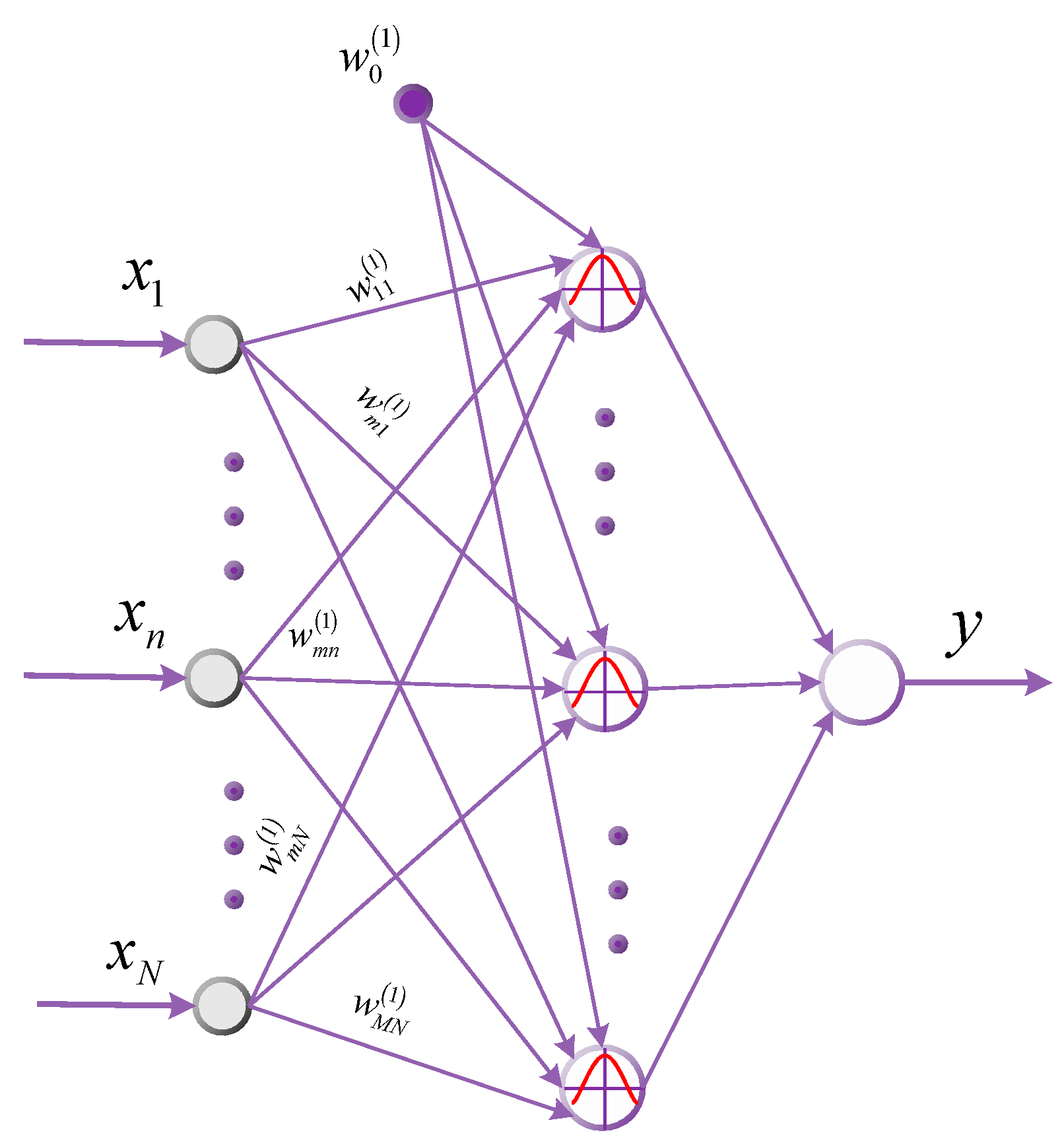
4.2. Radial Basis Networks
- Choice of the centres, Cj, of the hidden radial basis neurons;
- Choice of the spread parameter, σ—width of the radial function for each hidden neuron;
- Determination of the weight factors, wjk, between hidden (radial) and output layer.
4.3. Kohonen Maps
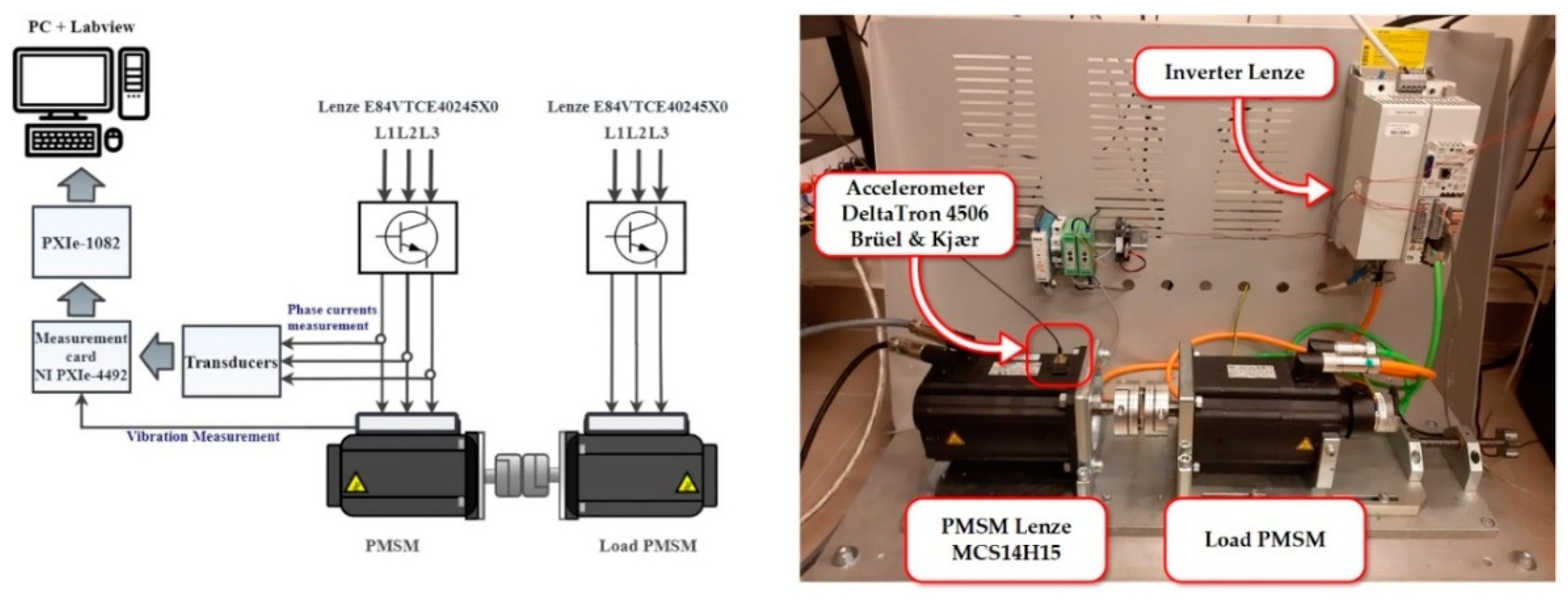
5. Description of the Laboratory Set-Up
6. Analysis of the Operation of Neural Detectors of Damages to Rolling Bearings
- Fault detector (type I)—determining the condition of the bearing, i.e., whether there is damage (1) or not (0) (healthy–faulty);
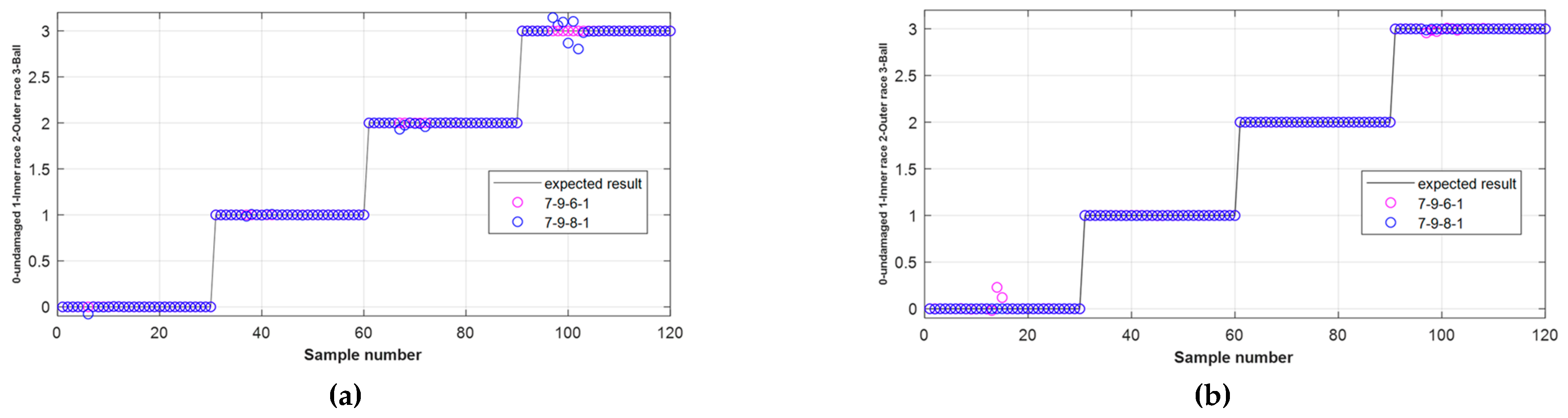
- Fault classifier (type II)—determining the type of damage, i.e., which bearing element was damaged.
6.1. Fault Detector Based on MLP Network
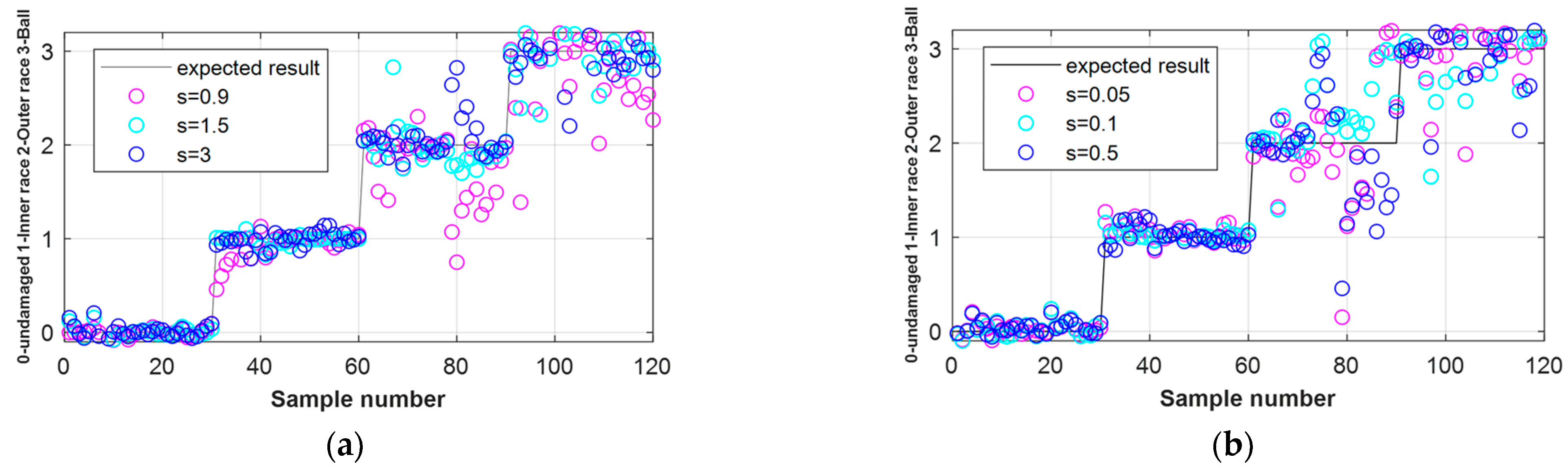
6.2. Fault Detector Based on RBF Network
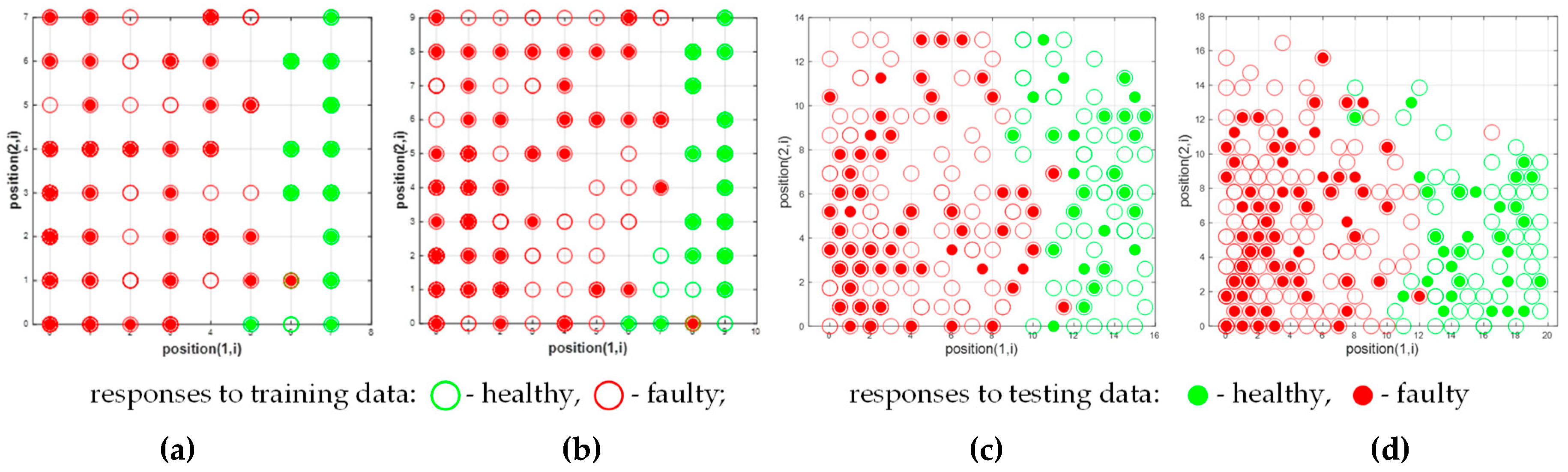
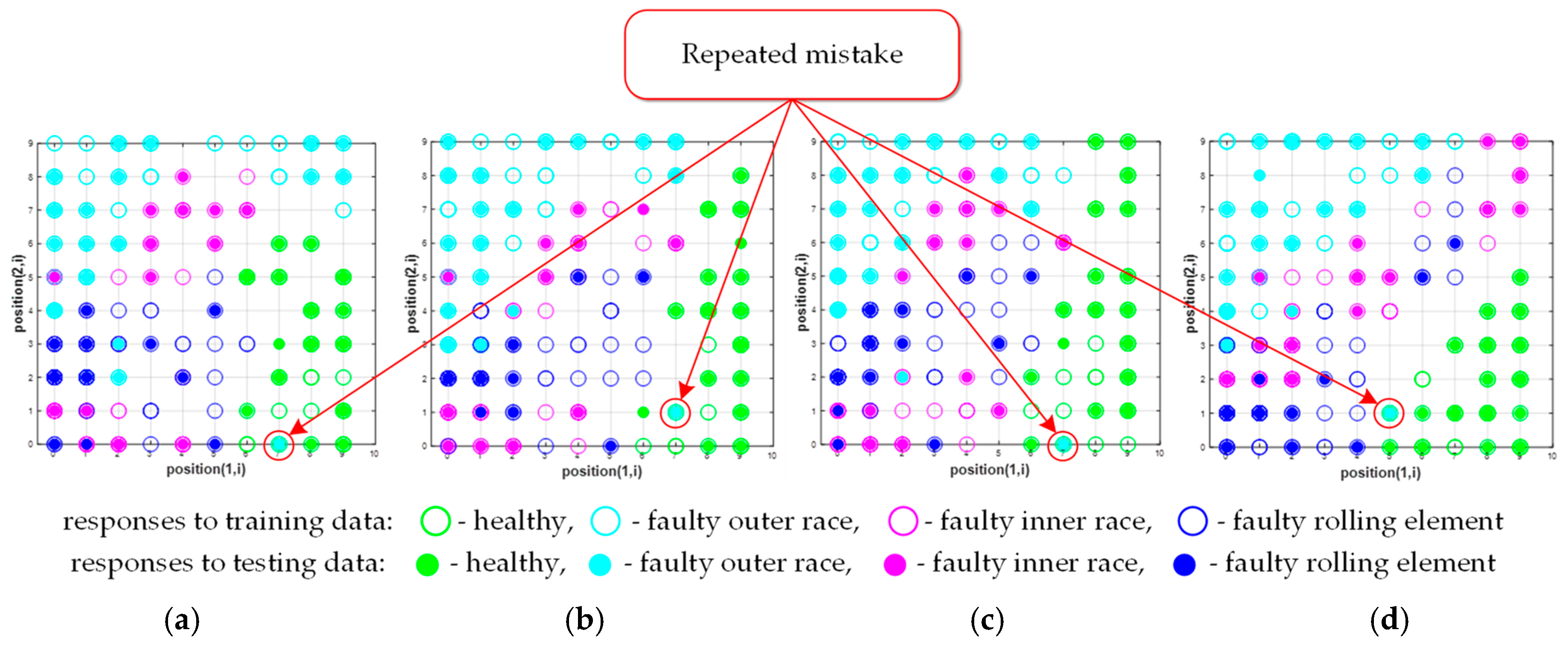
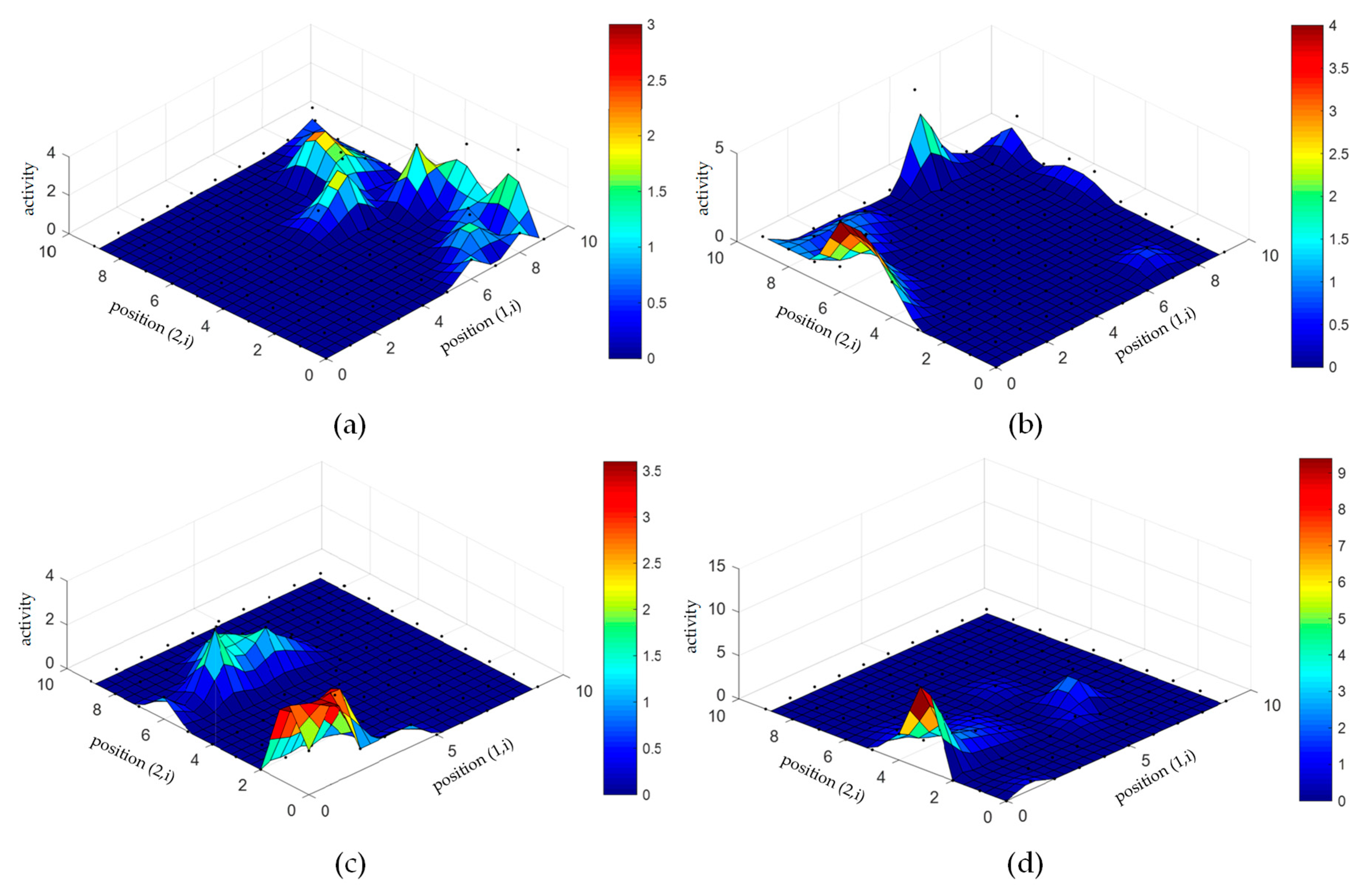
6.3. Fault Detector Based on SOM Network
7. Summary and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ullah, Z.; Lodhi, B.A.; Hur, J. Detection and Identification of Demagnetization and Bearing Faults in PMSM Using Transfer Learning-Based VGG. Energies 2020, 13, 3834. [Google Scholar] [CrossRef]
- Chen, Y.; Liang, S.; Li, W.; Liang, H.; Wang, C. Faults and Diagnosis Methods of Permanent Magnet Synchronous Motors: A Review. Appl. Sci. 2019, 9, 2116. [Google Scholar] [CrossRef]
- Rosero, J.; Romeral, L.; Rosero, E.; Urresty, J. Fault Detection in dynamic conditions by means of Discrete Wavelet Decomposition for PMSM running under Bearing Damage. In Proceedings of the 2009 Twenty-Fourth Annual IEEE Applied Power Electronics Conference and Exposition, Washington, DC, USA, 15–19 February 2009; pp. 951–956. [Google Scholar] [CrossRef]
- He, J.; Somogyi, C.; Strandt, A.; Demerdash, N.A.O. Diagnosis of stator winding short-circuit faults in an interior permanent magnet synchronous machine. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 3125–3130. [Google Scholar] [CrossRef]
- Nkuna, J.S.R. Vibration Condition Monitoring and Fault Classification of Rolling Element Bearings Utilising Kohonen’s Self-organising Maps. Theses and Dissertations (Mechanical Engineering). Ph.D. Thesis, Vaal University of Technology, Vanderbijlpark, South Africa, 2013. [Google Scholar]
- Picot, A.; Obeid, Z.; Régnier, J.; Poignant, S.; Darnis, O.; Maussion, P. Statistic-based spectral indicator for bearing fault detection in permanent-magnet synchronous machines using the stator current. Mech. Syst. Signal Process. 2014, 46, 424–441. [Google Scholar] [CrossRef]
- Ye, M.; Huang, J. Bearing Fault Diagnosis under Time-Varying Speed and Load Conditions via Speed Sensorless Algorithm and Angular Resample. In Proceedings of the 2018 XIII International Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018; pp. 1775–1781. [Google Scholar] [CrossRef]
- Lu, S.; He, Q.; Zhao, J. Bearing fault diagnosis of a permanent magnet synchronous motor via a fast and online order analysis method in an embedded system. Mech. Syst. Signal Process. 2018, 113, 36–49. [Google Scholar] [CrossRef]
- Nembhard, A.D.; Sinha, J.K.; Pinkerton, A.J.; Elbhbah, K. Fault diagnosis of rotating machines using vibration and bearing temperature measurements. Diagnostyka 2013, 14, 45–51. [Google Scholar]
- Rosero, J.; Cusido, J.; Ortega, J.A.; Romeral, L.; Garcia, A. PMSM Bearing Fault Detection by means of Fourier and Wavelet transform. In Proceedings of the IECON 2007—33rd Annual Conference of the IEEE Industrial Electronics Society, Taipei, Taiwan, 5–8 November 2007; pp. 1163–1168. [Google Scholar] [CrossRef]
- Liu, H.; Li, D.; Yuan, Y.; Zhang, S.; Zhao, H.; Deng, W. Fault Diagnosis for a Bearing Rolling Element Using Improved VMD and HT. Appl. Sci. 2019, 9, 1439. [Google Scholar] [CrossRef]
- Ren, B.; Yang, M.; Chai, N.; Li, Y.; Xu, D. Fault Diagnosis of Motor Bearing Based on Speed Signal Kurtosis Spectrum Analysis. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Skora, M.; Ewert, P.; Kowalski, C.T. Selected Rolling Bearing Fault Diagnostic Methods in Wheel Embedded Permanent Magnet Brushless Direct Current Motors. Energies 2019, 12, 4212. [Google Scholar] [CrossRef]
- Ewert, P.; Kowalski, C.T.; Orlowska-Kowalska, T. Low-Cost Monitoring and Diagnosis System for Rolling Bearing Faults of the Induction Motor Based on Neural Network Approach. Electronics 2020, 9, 1334. [Google Scholar] [CrossRef]
- Senanayaka, J.S.L.; Huynh, V.K.; Robbersmyr, K.G. A robust method for detection and classification of permanent magnet synchronous motor faults: Deep autoencoders and data fusion approach. J. Phys. Conf. Ser. 2018, 1037, 032029. [Google Scholar] [CrossRef]
- Senanayaka, J.S.L.; Huynh, V.K.; Robbersmyr, K.G. Fault detection and classification of permanent magnet synchronous motor in variable load and speed conditions using order tracking and machine learning. J. Phys. Conf. Ser. 2018, 1037, 032028. [Google Scholar] [CrossRef]
- Akar, M.; Hekim, M.; Orhan, U. Mechanical fault detection in permanent magnet synchronous motors using equal width discretization-based probability distribution and a neural network model. Turk. J. Electr. Eng. Comput. Sci. 2015, 23, 813–823. [Google Scholar] [CrossRef]
- Pandarakone, S.E.; Mizuno, Y.; Nakamura, H. Distinct Fault Analysis of Induction Motor Bearing Using Frequency Spectrum Determination and Support Vector Machine. IEEE Trans. Ind. Appl. 2017, 53, 3049–3056. [Google Scholar] [CrossRef]
- Navasari, E.; Asfani, D.A.; Negara, M.Y. Detection Of Induction Motor Bearing Damage With Starting Current Analysis Using Wavelet Discrete Transform And Artificial Neural Network. In Proceedings of the 2018 10th International Conference on Information Technology and Electrical Engineering (ICITEE), Kuta, Indonesia, 24–26 July 2018; pp. 316–319. [Google Scholar] [CrossRef]
- Hoang, D.T.; Kang, H.J. A Motor Current Signal-Based Bearing Fault Diagnosis Using Deep Learning and Information Fusion. IEEE Trans. Instrum. Meas. 2020, 69, 3325–3333. [Google Scholar] [CrossRef]
- Zhou, J.; Qin, Y.; Kou, L.; Yuwono, M.; SU, S. Fault detection of rolling bearing based on FFT and classification. J. Adv. Mech. Des. Syst. Manuf. 2015, 9. [Google Scholar] [CrossRef]
- Li, B.; Chow, M.-Y.; Tipsuwan, Y.; Hung, J.C. Neural-Network-Based Motor Rolling Bearing Fault Diagnosis. IEEE Trans. Ind. Electron. 2000, 47, 1060–1069. [Google Scholar] [CrossRef]
- Haroun, S.; Nait Seghir, A.; Touati, S. Feature Selection for Enhancement of Bearing Fault Detection and Diagnosis Based on Self-Organizing Map. In Recent Advances in Electrical Engineering and Control Applications; Chadli, M., Bououden, S., Zelinka, I., Eds.; Lecture Notes in Electrical Engineering; Springer: Cham, Switzerland, 2017; Volume 411. [Google Scholar] [CrossRef]
- Tandon, N.; Choudhury, A. A review of vibration and acoustic measurement methods for the detection of defects in rolling element bearings. Tribol. Int. 1999, 32, 469–480. [Google Scholar] [CrossRef]
- Zandi, O.; Poshtan, J. Brushless DC Motor Bearing Fault Detection Using Hall Effect Sensors and a Two-Stage Wavelet Transform. In Proceedings of the 26th Iranian Conference on Electrical Engineering (ICEE2018), Mashhad, Iran, 8–10 May 2018; pp. 827–833. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, L. A review of failure modes, condition monitoring and fault diagnosis methods for large-scale wind turbine bearings. Measurement 2020, 149, 107002. [Google Scholar] [CrossRef]
- Rolling Bearings—Damage and Failures—Terms, Characteristics and Causes; International Organization for Standardization: Geneva, Switzerland, 2017; ISO 15243:2017; Publication date: March 2017.
- Radu, C. The Most Common Causes of Bearing Failure and the Importance of Bearing Lubrication. RKB Technical Review. February 2010, pp. 1–7. Available online: https://www.rkbbearings.com/en/publications.php#sec12 (accessed on 23 December 2020).
- Bearing Damage and Failure Analysis, SKF Group, PUB BU/I3 14219/2 EN. June 2017, pp. 1–106. Available online: https://www.skf.com/binaries/pub12/Images/0901d1968064c148-Bearing-failures---14219_2-EN_tcm_12-297619.pdf (accessed on 23 December 2020).
- Smith, S.W. Digital Signal Processing: A Practical Guide for Engineers and Scientists; Elsevier Science: Burlington, VT, USA, 2002. [Google Scholar] [CrossRef]
- Lee, C.-Y.; Hsieh, Y.-H. Bearing damage detection of BLDC motors based on current envelope analysis. Meas. Sci. Rev. 2012, 12, 290–295. [Google Scholar] [CrossRef]
- Espinosa, A.G.; Rosero, J.A.; Cusid’o, J.; Romeral, L.; Ortega, J.A. Fault Detection by Means of Hilbert–Huang Transform of the Stator Current in a PMSM With Demagnetization. IEEE Trans. Energy Convers. 2010, 25, 312–318. [Google Scholar] [CrossRef]
- Bishop, M.C. Neural Networks for Pattern Recognition, 1st ed.; Oxford University Press: New York, NY, USA, 1996. [Google Scholar]
- Haykin, S. Neural Networks, a Comprehensive Foundation; Macmillan College Publishing Company: New York, NY, USA, 1994. [Google Scholar]
- Yu, H.; Wilamowski, B.M. Levenberg–Marquardt Training. In Industrial Electronics Handbook, 2nd ed.; Chapter 12; Intelligent Systems, CRC Press: Boca Raton, FL, USA, 2011; Volume 5, pp. 12-1–12-15. [Google Scholar]
- Demuth, H.; Beale, M. Neural Network Toolbox—User’s Guide; Version 4; The MathWorks, Inc.: Natick, MA, USA, 2004. [Google Scholar]
- Du, Y.-C.; Stephanus, A. Levenberg-Marquardt Neural Network Algorithm for Degree of Arteriovenous Fistula Stenosis Classification Using a Dual Optical Photoplethysmography Sensor. Sensors 2018, 18, 2322. [Google Scholar] [CrossRef]
- Zayani, R.; Bouallegue, R.; Roviras, D. Levenberg-Marquardt learning neural network for adaptive predistortion for time-varying HPA with memory in OFDM systems. In Proceedings of the EUSIPCO2008—16th European Signal Processing Conference, Lausanne, Switzerland, 25–29 August 2008; pp. 1–6. Available online: https://hal.archives-ouvertes.fr/hal-02457894 (accessed on 9 December 2020).
- Jazayeri, K.; Jazayeri, M.; Uysal, S. Comparative Analysis of Levenberg-Marquardt and Bayesian Regularization Backpropagation Algorithms in Photovoltaic Power Estimation Using Artificial Neural Network. In Advances in Data Mining. Applications and Theoretical Aspects. ICDM 2016; Perner, P., Ed.; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2016; Volume 9728. [Google Scholar] [CrossRef]
- Suliman, A.; Omarov, B.S. Applying Bayesian Regularization for Acceleration of Levenberg-Marquardt based Neural Network Training. Int. J. Interact. Multimed. Artif. Intell. 2018, 5, 68–72. [Google Scholar] [CrossRef]
- Gil, D.; Johnsson, M. Supervised SOM Based Architecture versus Multilayer Perceptron and RBF Networks. In Proceedings of the 26th Annual Workshop of the Swedish Artificial Intelligence Society (SAIS), Uppsala, Sweden, 20–21 May 2010; pp. 15–24. [Google Scholar]
- Bayram, S.; Ocal, M.E.; Laptali Oral, E.; Atis, C.D. Comparison of multilayer perceptron (MLP) and radial basis function (RBF) for construction cost estimation: The case of Turkey. J. Civ. Eng. Manag. 2016, 22, 480–490. [Google Scholar] [CrossRef]
- Fath, A.H.; Madanifar, F.; Abbasi, M. Implementation of multilayer perceptron (MLP) and radial basis function(RBF) neural networks to predict solution gas-oil ratio of crude oil systems. Petroleum 2020, 6, 80–91. [Google Scholar] [CrossRef]
- Jaganathan, B.; Venkatesh, S.; Bhardwaj, Y.; Sridhar, V. Optimal parameters estimation of a BLDC motor by Kohonen’s Self Organizing Map Method. In Proceedings of the 2011 IEEE Recent Advances in Intelligent Computational Systems, Trivandrum, Kerala, India, 22–24 September 2011; pp. 068–071. [Google Scholar] [CrossRef]
- Jacobs, S.; Rios-Gutierrez, F. Self-organizing maps for monitoring parameter deterioration of DC and AC motors. In Proceedings of the 2013 Proceedings of IEEE Southeastcon, Jacksonville, FL, USA, 4–7 April 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Khalfaoui, N.; Salhi, M.S.; Amiri, H. The SOM tool in mechanical fault detection over an electric asynchronous drive. In Proceedings of the 2016 4th International Conference on Control Engineering & Information Technology (CEIT), Hammamet, Tunisia, 16–18 December 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Skowron, M.; Orlowska-Kowalska, T. Efficiency of cascade-connected neural networks in detecting initial faults to induction motor drive electric windings. Electronics 2020, 9, 1314. [Google Scholar] [CrossRef]
- Dogan, Y.; Birant, D.; Kut, A. SOM++: Integration of Self-Organizing Map and K-Means++ Algorithms. In Machine Learning and Data Mining in Pattern Recognition. MLDM 2013; Perner, P., Ed.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2013; Volume 7988. [Google Scholar] [CrossRef]
- Bataineh, A.K.; Samkari, M.H.; Abdualla, A.; Al-Azzam, S. K-Means Clustering in WSN with Kohonen SOM and Conscience Function. Mod. Appl. Sci. 2019, 13, 63–75. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| fs (Hz) | fr (Hz) | 3fir (Hz) | 4fir (Hz) | 2for (Hz) | 3for (Hz) | 4fre + fr (Hz) |
|---|---|---|---|---|---|---|
| 20 | 5 | 74.25 | 99 | 30.5 | 45.75 | 84.8 |
| 60 | 15 | 222.75 | 297 | 91.5 | 137.25 | 254.4 |
| 100 | 25 | 371.25 | 495 | 152.5 | 228.75 | 424 |
| Number of Samples | FFT Analysis | ENV Analysis |
|---|---|---|
| Training set | 240 | 240 |
| Testing set | 120 | 120 |
| Structure | FFT | ENV | ||
|---|---|---|---|---|
| 7-4-1 | 7-5-4-1 | 7-4-1 | 7-5-4-1 | |
| tansig + trainlm | 98.33% | 100% | 95% | 100% |
| logsig + trainlm | 100% | 100% | 100% | 100% |
| tansig + trainbr | 100% | 100% | 100% | 100% |
| Structure | FFT | ENV | ||
|---|---|---|---|---|
| 7-9-6-1 | 7-9-8-1 | 7-9-6-1 | 7-9-8-1 | |
| tansig + trainlm | 98.94% | 99.22% | 99.61% | 99.50% |
| logsig + trainlm | 99.17% | 97.2% | 99.17% | 100% |
| tansig + trainbr | 99.5% | 97.2% | 99.94% | 99.83% |
| Detector Type | σ | 0.05 | 0.09 | 0.1 | 0.3 | 0.5 | 0.9 | 1.2 | 1.5 | 2 | 3 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Fault detector (type I) | FFT | 92.5% | 95% | 95% | 100% | 95% | |||||
| ENV | 96.7% | 100% | 100% | 100% | 100% | ||||||
| Fault classifier (type II) | FFT | 92.5% | 97.5% | 96.7% | 95.8% | 90% | |||||
| ENV | 85% | 90% | 98.3% | 100% | 98.3% |
| Parameters | Sizes of the Hexagonal Map | |||
|---|---|---|---|---|
| 8 × 8 | 10 × 10 | 16 × 16 | 20 × 20 | |
| Average effectiveness | 98.7% | 98.8% | 99.3% | 99% |
| Parameters | Neighbourhood Radius | Distance Function | ||
|---|---|---|---|---|
| 2 | 6 | linkdist | dist | |
| Average effectiveness | 98.6% | 98.7% | 98.7% | 98.8% |
| Parameters | Sizes of the Hexagonal Map | |||
|---|---|---|---|---|
| 8 × 8 | 10 × 10 | 16 × 16 | 20 × 20 | |
| Average effectiveness | 83.3% | 92.3% | 95.3% | 95% |
| Parameters | Neighbourhood Radius | Distance Function | ||
|---|---|---|---|---|
| 2 | 6 | linkdist | dist | |
| Average effectiveness | 92% | 92.3% | 90.8% | 92.5% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ewert, P.; Orlowska-Kowalska, T.; Jankowska, K. Effectiveness Analysis of PMSM Motor Rolling Bearing Fault Detectors Based on Vibration Analysis and Shallow Neural Networks. Energies 2021, 14, 712. https://doi.org/10.3390/en14030712
Ewert P, Orlowska-Kowalska T, Jankowska K. Effectiveness Analysis of PMSM Motor Rolling Bearing Fault Detectors Based on Vibration Analysis and Shallow Neural Networks. Energies. 2021; 14(3):712. https://doi.org/10.3390/en14030712
Chicago/Turabian StyleEwert, Pawel, Teresa Orlowska-Kowalska, and Kamila Jankowska. 2021. "Effectiveness Analysis of PMSM Motor Rolling Bearing Fault Detectors Based on Vibration Analysis and Shallow Neural Networks" Energies 14, no. 3: 712. https://doi.org/10.3390/en14030712
APA StyleEwert, P., Orlowska-Kowalska, T., & Jankowska, K. (2021). Effectiveness Analysis of PMSM Motor Rolling Bearing Fault Detectors Based on Vibration Analysis and Shallow Neural Networks. Energies, 14(3), 712. https://doi.org/10.3390/en14030712