
Nyström Minimum Kernel Risk-Sensitive Loss Based Seamless Control of Grid-Tied PV-Hybrid Energy Storage System





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
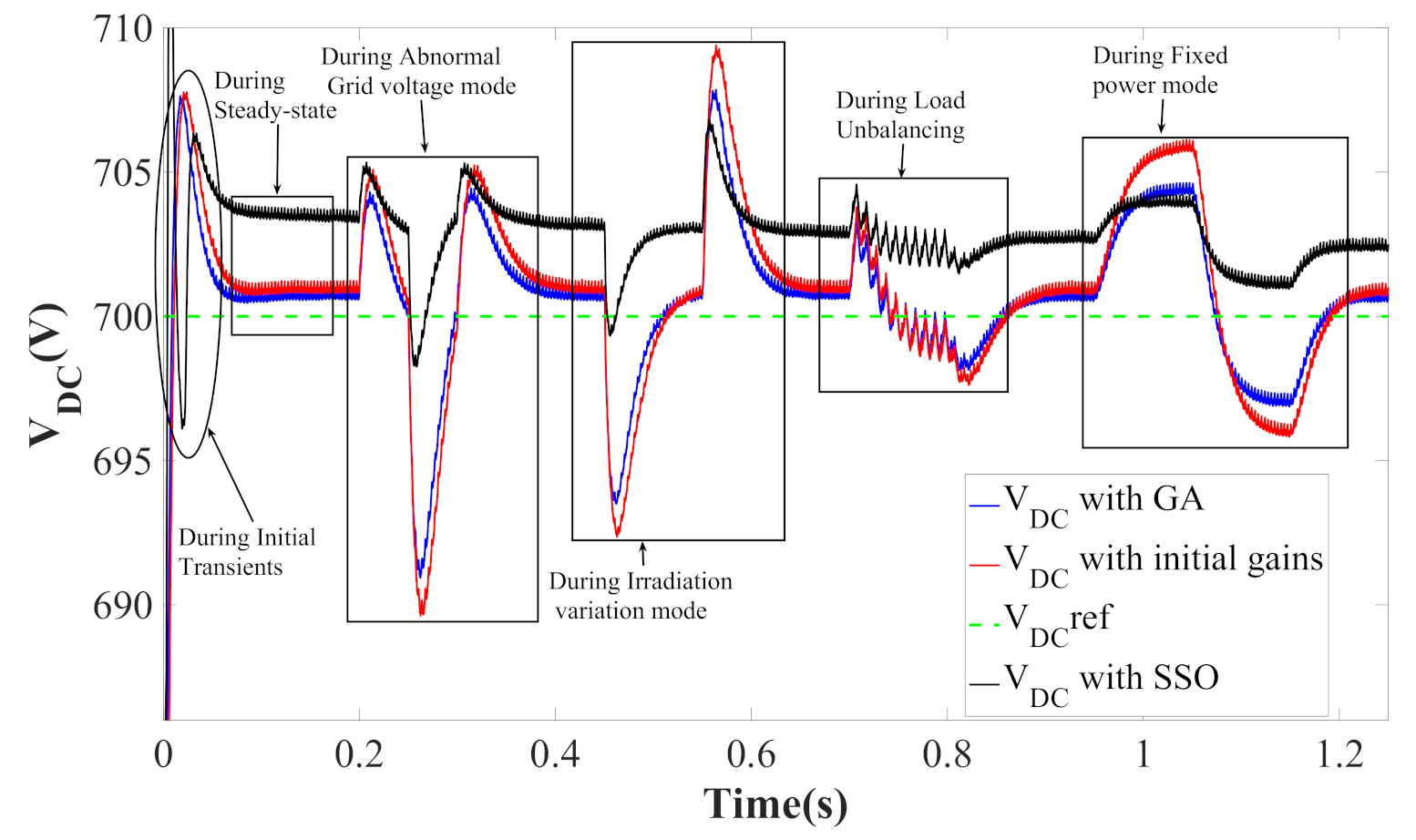
- VDC regulation: The DC link voltage is regulated with the gain optimized PI controller based on the SSO algorithm that generates an accurate loss component of current and enhances the stability of the system.
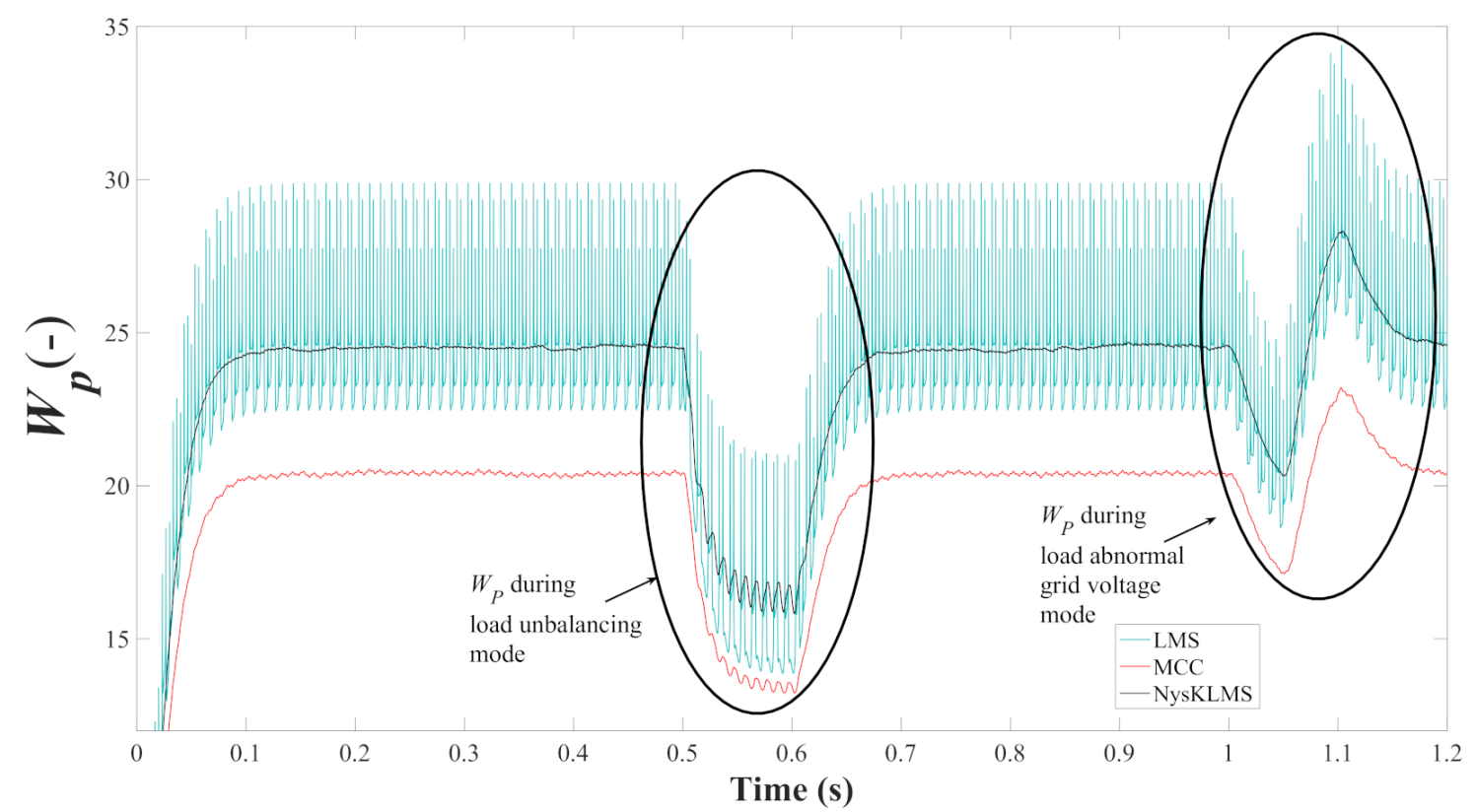
- Adaptive control of VSC: The NysMKRSL-based VSC control uses excess mean square error (EMSE) as the cost function to speed up the convergence and enhance precision. The optimized DC bus further improves the performance of the proposed control by better extraction of the weight signal and fundamental component of currents.
- Seamless control: The system facilitates the transition from grid-tied mode to islanding mode to re-synchronization mode without any major transients and disturbances to the system stability.
- Multifunctional operation of VSC: The VSC will perform the multifunction operations, including reactive power compensation, load and power balancing while maintaining UPF throughout the operation.
- Dynamic operating conditions: Various dynamic conditions have been induced, such as irradiation variation, load unbalancing, fixed power mode, and grid voltage variation (sag and swell) to analyze the system.
- HESS: The HESS consisting of lead-acid battery, UC, and PEMFC can manage the system irregularities occurring on the grid, load, and PV side.
2. Proposed Topology
3. Controlling Strategies
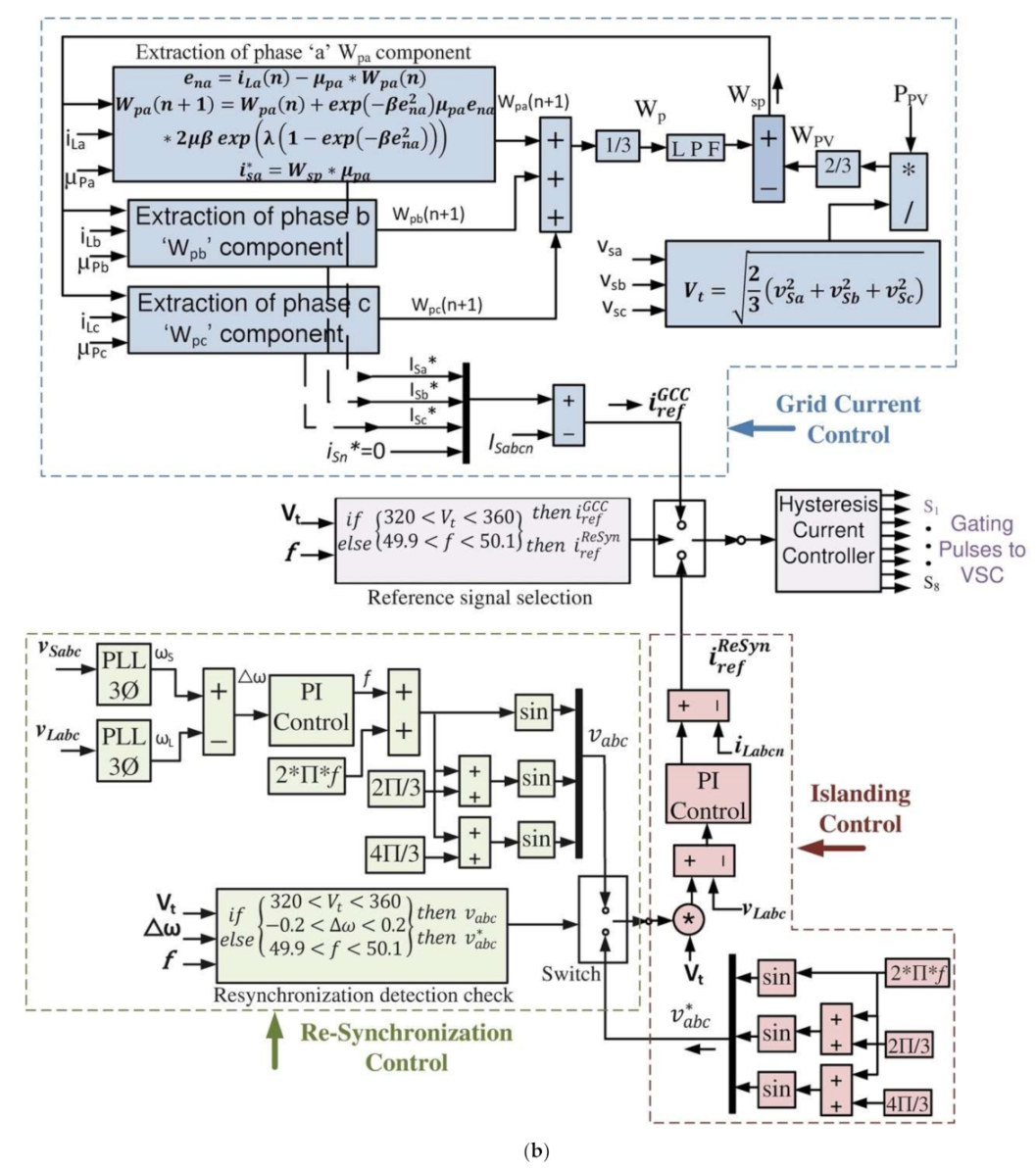
3.1. VSC Control
3.2. Seamless Control for Islanding and Re-Synchronization
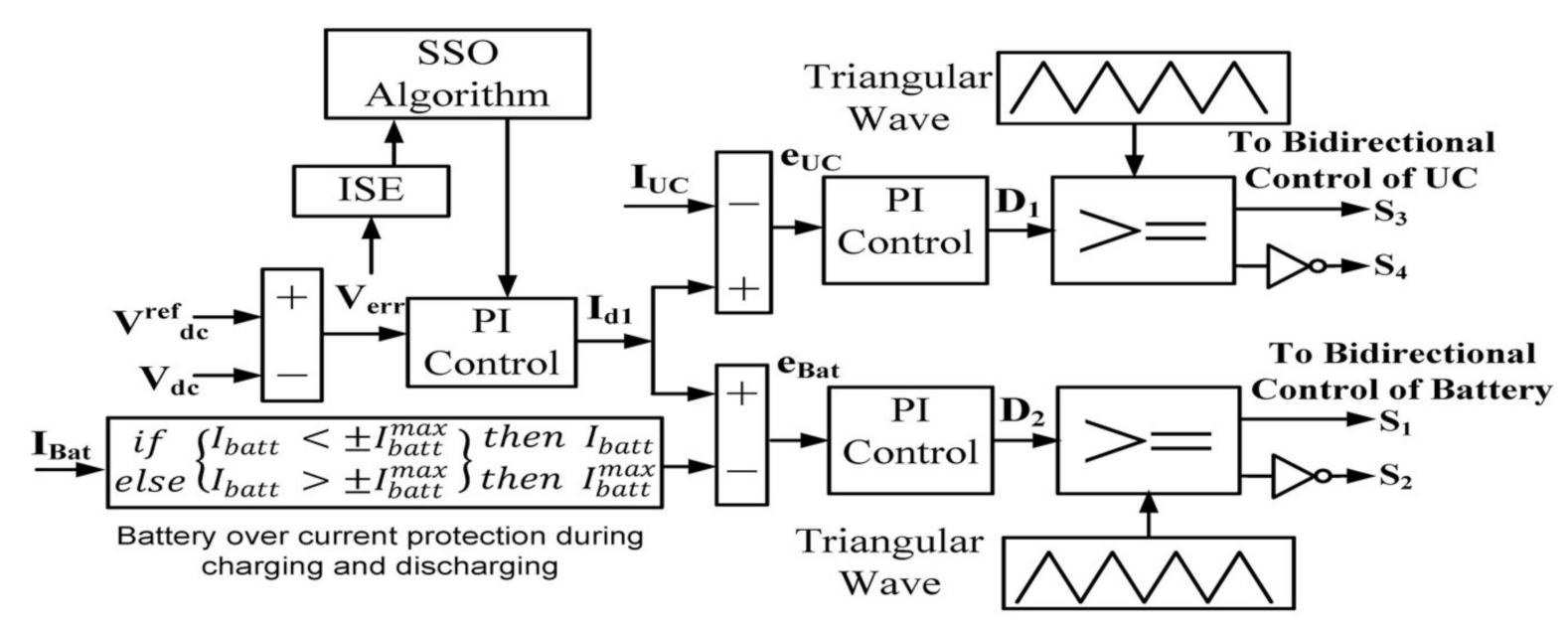
3.3. Bi-Directional Converter Control
3.4. DC-Link Voltage Control
4. Results and Discussion
4.1. Steady-State Performance
4.2. Irradiation Variation Mode Performance
4.3. Load Unbalancing Mode Performance
4.4. Fixed Power Mode Performance
4.5. Source Voltage Sag and Swell Performance
4.6. DC Bus Optimization Mode Performance
4.7. Islanding and Re-Synchronization Mode Performance
4.8. Comparison of VSC Controls
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| In-phase components | |
| Voltage magnitude (V) | |
| Error signals | |
| Source voltage (V) | |
| Source current (A) | |
| Load voltage (V) | |
| Load current (A) | |
| Weight signals | |
| Kernel function, kernel width | |
| , | Risk sensitive parameter, step size |
| Feed-forward term | |
| Average weight signals | |
| Overall weight | |
| Reference source current (A) | |
| during fixed power mode | |
| Fixed power mode reference currents (A) | |
| Frequency (Hz) | |
| Reference voltage (V) | |
| Reference Load voltage (V) | |
| Grid voltage phase angle | |
| Load voltage phase angle | |
| Change in phase angle | |
| Reference Resynchronized current (A) | |
| UC and battery gains | |
| Loss component of current | |
| Battery voltage (A) | |
| Battery current (A) | |
| Reference battery current (A) | |
| UC voltage (V) | |
| UC current (A) | |
| Reference UC current (A) | |
| DC bus voltage (V) | |
| Reference DC bus voltage (V) | |
| , | Position of leader & follower salp |
| Food position | |
| Upper and lower bound | |
| ,, | Uniformly generated random no. |
| Current and maximum iteration | |
| vSa, iSa | Phase ‘a’ grid voltage & current |
| vLa, iLa | Phase ‘a’ load voltage & current |
| Source neutral current (A) | |
| Reference source neutral current (A) | |
| Compensator neutral current (A) | |
| Load neutral current (A) | |
| PV voltage (V) | |
| Reference PV voltage (V) | |
| PV current (A) | |
| Reference PV current (A) | |
| PV power (kW) | |
| Reference PV power (kW) | |
| Active power (kW) | |
| Reference active power (kW) | |
| Reactive power (kVAr) | |
| Reference reactive power (kVAr) | |
| No. of search agents | |
| t | Total iterations |
| NysMKRSL | Nyström minimum kernel risk-sensitive loss |
| VSC | Voltage source converter |
| HESS | Hybrid energy storage system |
| UPF | Unity power factor |
| PI | Proportional integral |
| SSO | Salp swarm optimization |
| UC | Ultracapacitor |
| PEMFC | Proton Exchange Membrane FuelCell |
| PV | Photovoltaic |
| AI | Artificial intelligence |
| CSC | Current source converter |
| GA | Genetic algorithm |
| PSO | Particle swarm optimization |
| MKAF | Multi kernel adaptive filter |
| InC | Incremental conductance |
| PCC | Point of common coupling |
| InC | Incremental conductance |
| VQ | Vector Quantization |
| RFF | Random Fourier feature |
| GCC | Grid current control |
| THD | Total harmonics distortion |
| HCC | Hysteresis current controller |
| MCS | Master control switch |
| ISE | Integral square error |
References
- IEA. Solar PV; IEA: Paris, France, 2020. Available online: https://www.iea.org/reports/solar-pv (accessed on 1 March 2021).
- IEA. World Energy Outlook 2020; IEA: Paris, France, 2020. Available online: https://www.iea.org/reports/world-energy-outlook-2020 (accessed on 1 March 2021).
- Stamford, L.; Azapagic, A. Environmental Impacts of Photovoltaics: The Effects of Technological Improvements and Transfer of Manufacturing from Europe to China. Energy Technol. 2018, 6, 1148–1160. [Google Scholar] [CrossRef]
- Vrînceanu, A.; Grigorescu, I.; Dumitraşcu, M.; Mocanu, I.; Dumitrica, C.; Micu, D.; Kucsicsa, G.; Mitrica, B. Impacts of photovoltaic farms on the environment in the Romanian plain. Energies 2019, 12, 2533. [Google Scholar] [CrossRef]
- Singh, B.; Chandra, A.; Al-haddad, K. Power Quality Problems and Mitigation Techniques; John Wiley & Sons: Hoboken, NJ, USA, 2015; ISBN 9781118922057. [Google Scholar]
- Agarwal, R.K.; Hussain, I.; Singh, B. Application of LMS-Based NN Structure for Power Quality Enhancement in a Distribution Network. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 1598–1607. [Google Scholar] [CrossRef] [PubMed]
- Agarwal, R.K.; Hussain, I.; Singh, B. LMF-based control algorithm for single stage three-phase grid integrated solar PV system. IEEE Trans. Sustain. Energy 2016, 7, 1379–1387. [Google Scholar] [CrossRef]
- Kumar, N.; Hussain, I.; Singh, B. Normal Harmonic Search Algorithm-Based MPPT for Solar PV System and Integrated With Grid Using Reduced Sensor Approach and PNKLMS Algorithm. IEEE Trans. Ind. Appl. 2018, 54, 6343–6352. [Google Scholar] [CrossRef]
- Kumar, N.; Singh, B. ANOVA Kernel Kalman Filter for Multi-Objective Grid Integrated Solar Photovoltaic-Distribution Static Compensator. IEEE Trans. Circuits Syst. I Regul. Pap. 2019, 66, 4256–4264. [Google Scholar] [CrossRef]
- Kumar, N.; Singh, B.; Panigrahi, B.K.; Chakraborty, C.; Suryawanshi, H.M.; Verma, V. Integration of solar PV with low-voltage weak grid system: Using normalized laplacian kernel adaptive Kalman filter and learning based InC algorithm. IEEE Trans. Power Electron. 2019, 34, 10746–10758. [Google Scholar] [CrossRef]
- Modi, G.; Kumar, S.; Singh, B. A Maximum Correntropy Criteria Based Adaptive Algorithm for an Improved Power Quality SPV System. In Proceedings of the 8th Power India International Conference (PIICON), Kurukshetra, India, 10–12 December 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Ranjan, A.; Kewat, S.; Singh, B. Reweighted Zero Attracting Maximum Correntropy Criterion Algorithm based Solar Grid Interfaced System for Alleviating Power Quality Problems. In Proceedings of the IEEE 9th Power India International Conference (PIICON), Sonepat, India, 28 February–1 March 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Chankaya, M.; Hussain, I.; Ahmad, A. Variable parameter zero-attracting least mean square control of multifunctional PV-Battery-Fuel Cell Grid-tied system. Int. J. Power Energy Syst. 2021, 41. [Google Scholar] [CrossRef]
- Chen, B.; Xing, L.; Xu, B.; Zhao, H.; Zheng, N.; Príncipe, J.C. Kernel Risk-Sensitive Loss: Definition, Properties and Application to Robust Adaptive Filtering. IEEE Trans. Signal Process. 2017, 65, 2888–2901. [Google Scholar] [CrossRef]
- Zhang, T.; Wang, S.; Huang, X.; Wang, L. The Nyström minimum kernel risk-sensitive loss algorithm with k-means sampling. J. Frankl. Inst. 2020, 357, 10082–10099. [Google Scholar] [CrossRef]
- Panten, N.; Hoffmann, N.; Fuchs, F.W. Finite Control Set Model Predictive Current Control for Grid-Connected Voltage-Source Converters with LCL Filters: A Study Based on Different State Feedbacks. IEEE Trans. Power Electron. 2016, 31, 5189–5200. [Google Scholar] [CrossRef]
- Dragičević, T.; Novak, M. Weighting Factor Design in Model Predictive Control of Power Electronic Converters: An Artificial Neural Network Approach. IEEE Trans. Ind. Electron. 2019, 66, 8870–8880. [Google Scholar] [CrossRef]
- Patowary, M.; Panda, G.; Naidu, B.R.; Deka, B.C. ANN-based adaptive current controller for on grid DG system to meet frequency deviation and transient load challenges with hardware implementation. IET Renew. Power Gener. 2018, 12, 61–71. [Google Scholar] [CrossRef]
- Saroha, J.; Singh, M.; Jain, D.K. ANFIS-Based add-on controller for unbalance voltage compensation in a low-voltage microgrid. IEEE Trans. Ind. Informatics 2018, 14, 5338–5345. [Google Scholar] [CrossRef]
- Saxena, N.; Singh, B.; Vyas, A.L. Single-phase solar PV system with battery and exchange of power in grid-connected and standalone modes. IET Renew. Power Gener. 2017, 11, 325–333. [Google Scholar] [CrossRef]
- Beniwal, N.; Hussain, I.; Singh, B. Control and operation of a solar PV-battery-grid-tied system in fixed and variable power mode. IET Gener. Transm. Distrib. 2018, 12, 2633–2641. [Google Scholar] [CrossRef]
- Ku Ahmad, K.N.E.; Selvaraj, J.; Rahim, N.A. A review of the islanding detection methods in grid-connected PV inverters. Renew. Sustain. Energy Rev. 2013, 21, 756–766. [Google Scholar] [CrossRef]
- Kim, M.S.; Haider, R.; Cho, G.J.; Kim, C.H.; Won, C.Y.; Chai, J.S. Comprehensive review of islanding detection methods for distributed generation systems. Energies 2019, 12, 1. [Google Scholar] [CrossRef]
- Trujillo Rodriguez, C.; Velasco De La Fuente, D.; Garcera, G.; Figueres, E.; Guacaneme Moreno, J.A. Reconfigurable control scheme for a PV microinverter working in both grid-connected and Island modes. IEEE Trans. Ind. Electron. 2013, 60, 1582–1595. [Google Scholar] [CrossRef]
- Kim, H.; Yu, T.; Choi, S. Indirect current control algorithm for utility interactive inverters in distributed generation systems. IEEE Trans. Power Electron. 2008, 23, 1342–1347. [Google Scholar] [CrossRef]
- Mahmood, H.; Jiang, J. A Control Strategy of a Distributed Generation Unit for Seamless Transfer between Grid Connected and Islanded Modes. In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014; pp. 2518–2523. [Google Scholar] [CrossRef]
- Micallef, A.; Member, S.; Apap, M.; Spiteri-staines, C.; Guerrero, J.M. Single-Phase Microgrid With Seamless Transition Capabilities between Modes of Operation. IEEE Tran. Smart Grid 2015, 6, 2736–2745. [Google Scholar] [CrossRef]
- Lim, K.; Choi, J. Seamless grid synchronization of a proportional+resonant control-based voltage controller considering non-linear loads under Islanded mode. Energies 2017, 10, 1514. [Google Scholar] [CrossRef]
- Fatu, M.; Blaabjerg, F.; Boldea, I. Grid to Standalone Transition Motion-Sensorless Dual-Inverter Control of PMSG With Asymmetrical Grid Voltage Sags and Harmonics Filtering. IEEE Trans. Power Electron. 2014, 29, 3463–3472. [Google Scholar] [CrossRef]
- Modes, S.; Yao, Z.; Xiao, L.; Yan, Y. Seamless Transfer of Single-Phase Grid-Interactive Inverters between Grid-Connected. IEEE Trans. Power Electron. 2010, 25, 1597–1603. [Google Scholar] [CrossRef]
- Sharaf, A.M.; El-Gammal, A.A.A. A novel PSO-based hybrid PV-FC-diesel-battery electric PID-controller drive system for electric vehicle traction. In Proceedings of the 2010 IEEE Electrical Power & Energy Conference, Halifax, NS, Canada, 25–27 August 2010. [Google Scholar] [CrossRef]
- Sharma, R.; Kewat, S.; Singh, B. Robust MMSOGI-FLL control algorithm for power quality improvement of solar PV-SyRG pico hydro-BES based islanded microgrid with dynamic load. IET Power Electron. 2020, 13, 2874–2884. [Google Scholar] [CrossRef]
- Ise, T.; Kita, M.; Taguchi, A. A hybrid energy storage with a SMES and secondary battery. IEEE Trans. Appl. Supercond. 2005, 15, 1915–1918. [Google Scholar] [CrossRef]
- Natarajan, S.K.; Kamran, F.; Ragavan, N.; Rajesh, R.; Jena, R.K.; Suraparaju, S.K. Analysis of PEM hydrogen fuel cell and solar PV cell hybrid model. Mater. Today Proc. 2019, 17, 246–253. [Google Scholar] [CrossRef]
- Karami, N.; Moubayed, N.; Outbib, R. Energy management for a PEMFC-PV hybrid system. Energy Convers. Manag. 2014, 82, 154–168. [Google Scholar] [CrossRef]
- Nengroo, S.H.; Kamran, M.A.; Ali, M.U.; Kim, D.H.; Kim, M.S.; Hussain, A.; Kim, H.J. Dual battery storage system: An optimized strategy for the utilization of renewable photovoltaic energy in the United Kingdom. Electronics 2018, 7, 177. [Google Scholar] [CrossRef]
- Zhang, Q.; Mao, M.; Ke, G.; Zhou, L.; Xie, B. Stability problems of PV inverter in weak grid: A review. IET Power Electron. 2020, 13, 2165–2174. [Google Scholar] [CrossRef]
- Abedi, A.; Rezaie, B.; Khosravi, A.; Shahabi, M. DC-bus Voltage Control based on Direct Lyapunov Method for a Converter-based Stand-alone DC Micro-grid. Electr. Power Syst. Res. 2020, 187, 106451. [Google Scholar] [CrossRef]
- Hassoune, A.; Khafallah, M.; Mesbahi, A.; Bouragba, T. Optimization Techniques for DC Bus Voltage Balancing in a PV Grid System Based EVs Charging Station. Adv. Sci. Technol. Innov. 2019, 123–131. [Google Scholar] [CrossRef]
- Elvira, D.G.; Blaví, H.V.; Pastor, À.C.; Salamero, L.M. Efficiency optimization of a variable bus voltage DC microgrid. Energies 2018, 11, 3090. [Google Scholar] [CrossRef]
- Zhou, X.; Zhou, Y.; Ma, Y.; Yang, L.; Yang, X.; Zhang, B. DC bus voltage control of grid-side converter in permanent magnet synchronous generator based on improved second-order linear active disturbance rejection control. Energies 2020, 13, 4592. [Google Scholar] [CrossRef]
- Song, L.; Huang, L.; Long, B.; Li, F. A genetic-algorithm-based DC current minimization scheme for transformless grid-connected photovoltaic inverters. Energies 2020, 13, 746. [Google Scholar] [CrossRef]
- Gomes, A.D.O.; Gouvêa, M.M. DC power flow optimization with a parallel evolutionary algorithm. In Proceedings of the Sixth IEEE/PES Transmission and Distribution: Latin America Conference and Exposition (T&D-LA), Montevideo, Uruguay, 3–5 September 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Thameur, A.; Noureddine, B.; Abdelhalim, B.; Boualam, B.; Abdelkader, L.; Karima, B.; Tarak, B. Particle Swarm Optimization of PI Controllers in Grid-Connected PV Conversion Cascade Based Three Levels NPC Inverter. In Proceedings of the IEEE International Conference on Environment and Electrical Engineering and 2020 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Madrid, Spain, 9–12 June 2020. [Google Scholar] [CrossRef]
- Singh, A.; Sharma, V. Salp swarm algorithm-based model predictive controller for frequency regulation of solar integrated power system. Neural Comput. Appl. 2019, 31, 8859–8870. [Google Scholar] [CrossRef]
- Srikanth Goud, B.; Rao, B.L.; Devi, B.N.; Kumar, K.S.; Keerthi, N. Review on optimization techniques employed in distribution generation. J. Crit. Rev. 2020, 7, 639–645. [Google Scholar] [CrossRef]




















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chankaya, M.; Hussain, I.; Ahmad, A.; Khan, I.; Muyeen, S.M. Nyström Minimum Kernel Risk-Sensitive Loss Based Seamless Control of Grid-Tied PV-Hybrid Energy Storage System. Energies 2021, 14, 1365. https://doi.org/10.3390/en14051365
Chankaya M, Hussain I, Ahmad A, Khan I, Muyeen SM. Nyström Minimum Kernel Risk-Sensitive Loss Based Seamless Control of Grid-Tied PV-Hybrid Energy Storage System. Energies. 2021; 14(5):1365. https://doi.org/10.3390/en14051365
Chicago/Turabian StyleChankaya, Mukul, Ikhlaq Hussain, Aijaz Ahmad, Irfan Khan, and S.M. Muyeen. 2021. "Nyström Minimum Kernel Risk-Sensitive Loss Based Seamless Control of Grid-Tied PV-Hybrid Energy Storage System" Energies 14, no. 5: 1365. https://doi.org/10.3390/en14051365
APA StyleChankaya, M., Hussain, I., Ahmad, A., Khan, I., & Muyeen, S. M. (2021). Nyström Minimum Kernel Risk-Sensitive Loss Based Seamless Control of Grid-Tied PV-Hybrid Energy Storage System. Energies, 14(5), 1365. https://doi.org/10.3390/en14051365