
Huber-Based Robust Unscented Kalman Filter Distributed Drive Electric Vehicle State Observation

Abstract
1. Introduction
2. Nonlinear Time-Varying Parametric Vehicle Dynamics Model
2.1. Vehicle Model
2.2. Tire Model
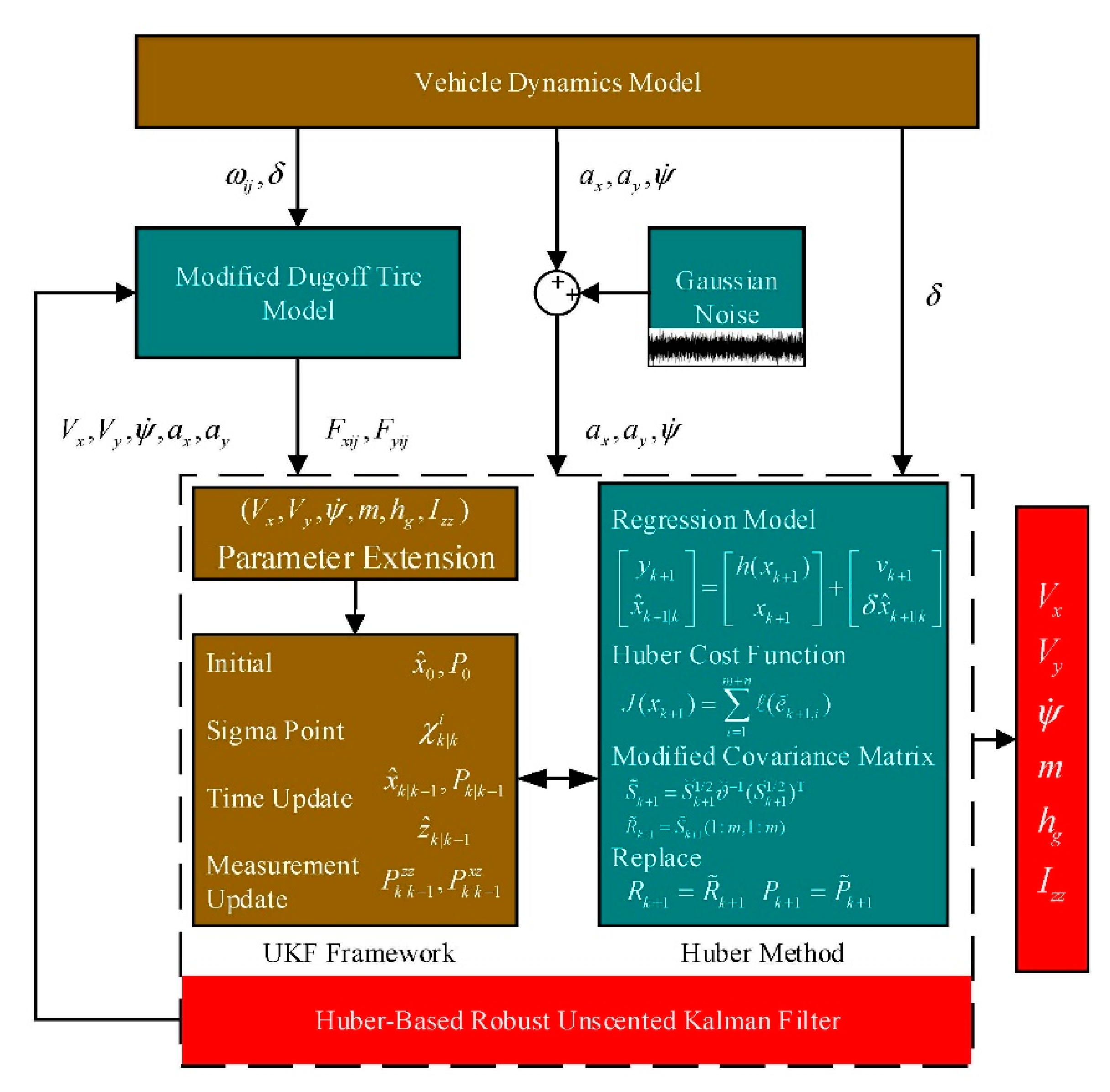
3. Huber-Based Robust Unscented Kalman Filter (HRUKF)
3.1. System Equations and Observation Equations
3.2. Unscented Kalman Filter Framework
3.3. HRUKF Algorithm Derivation
4. Simulation Results and Analysis
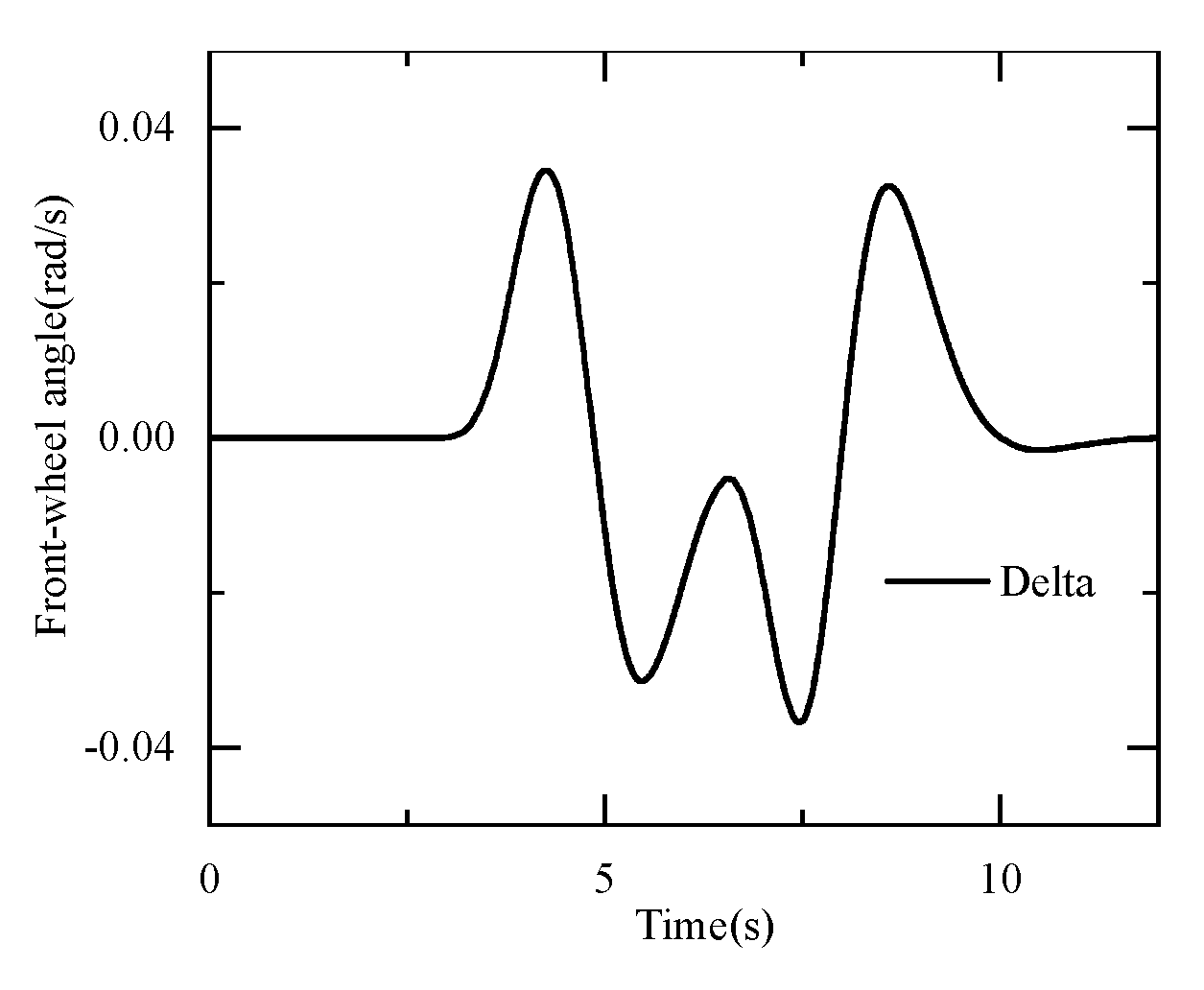
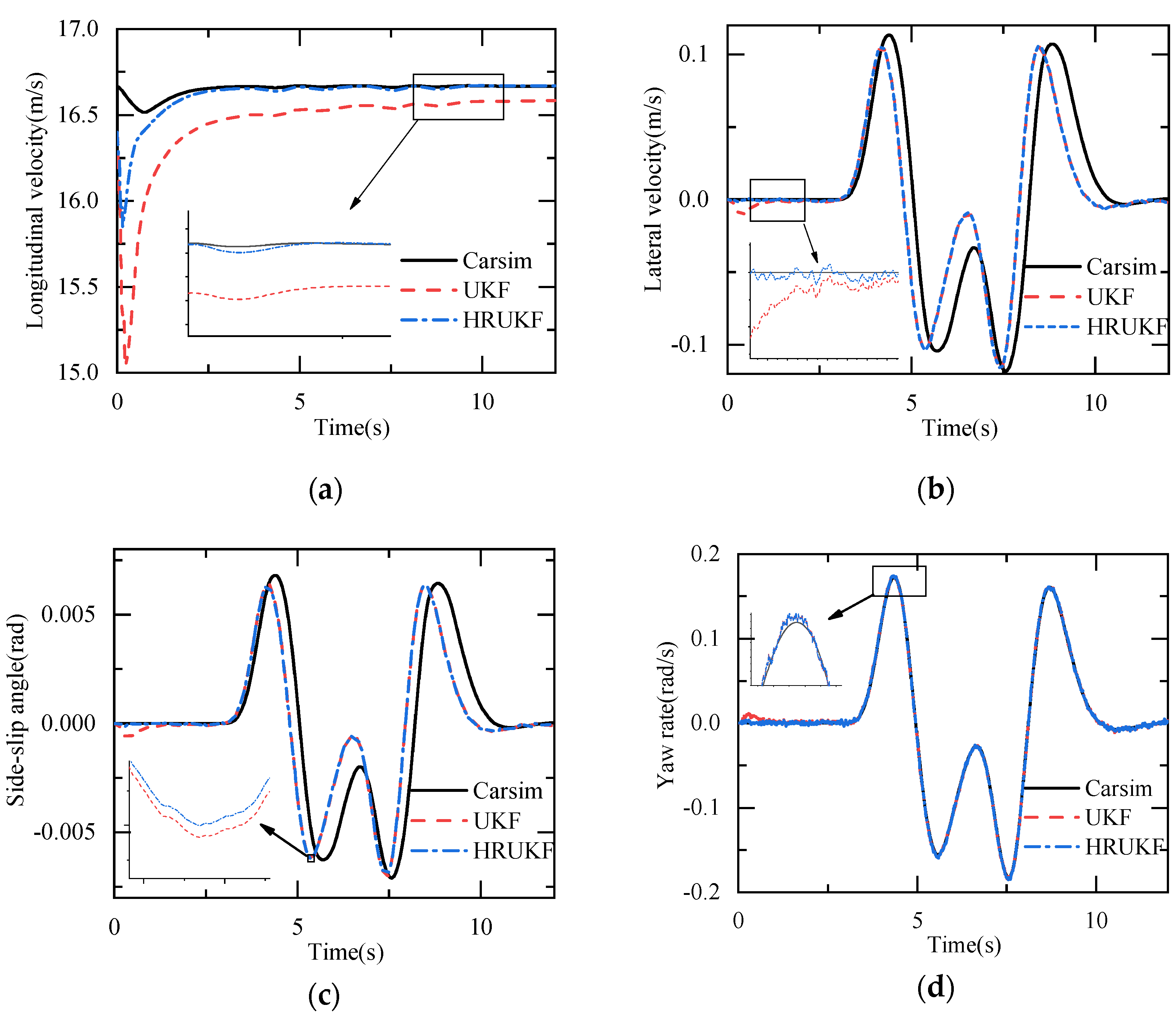
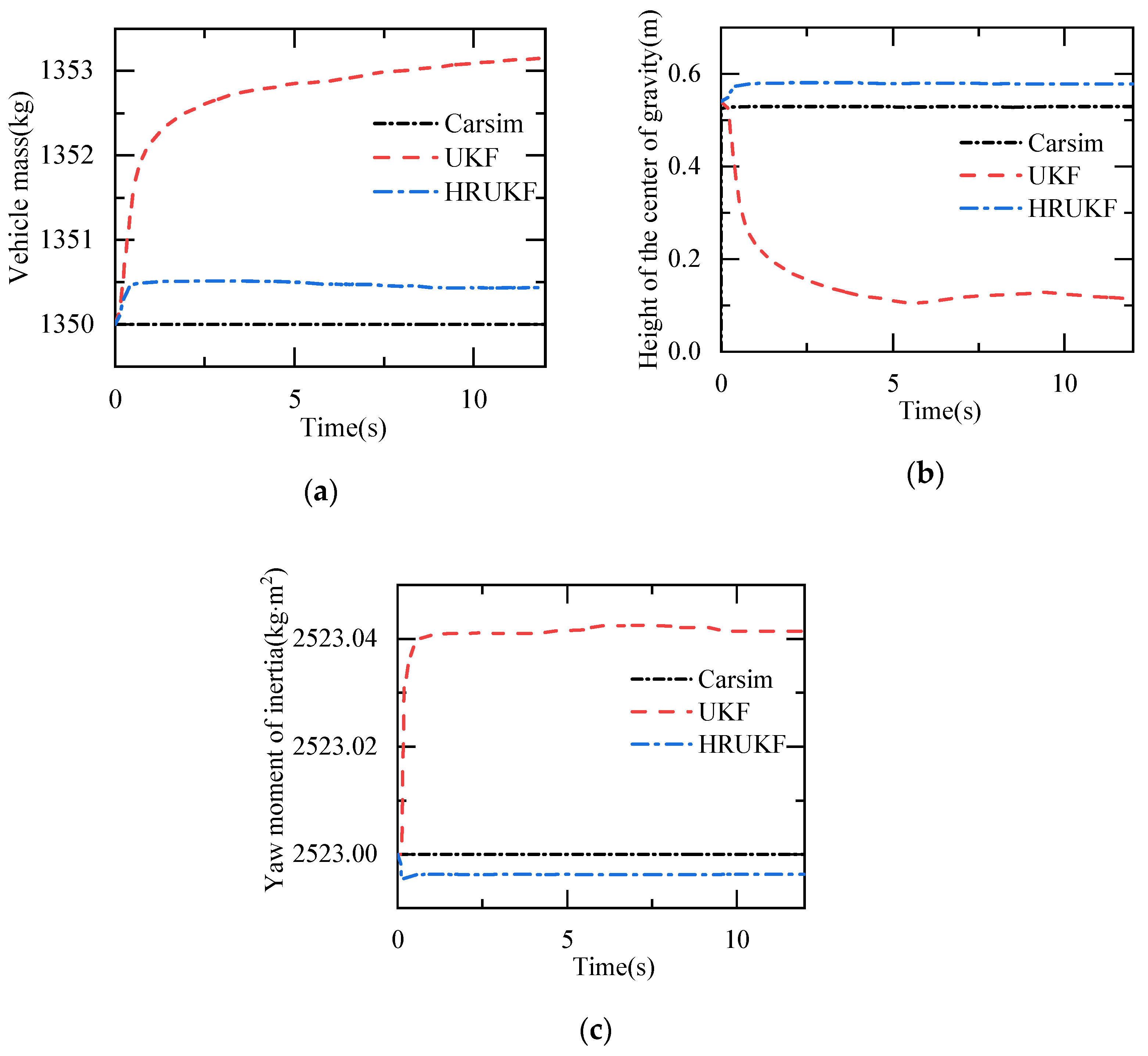
4.1. Simulation of Double-Lane Change Conditions
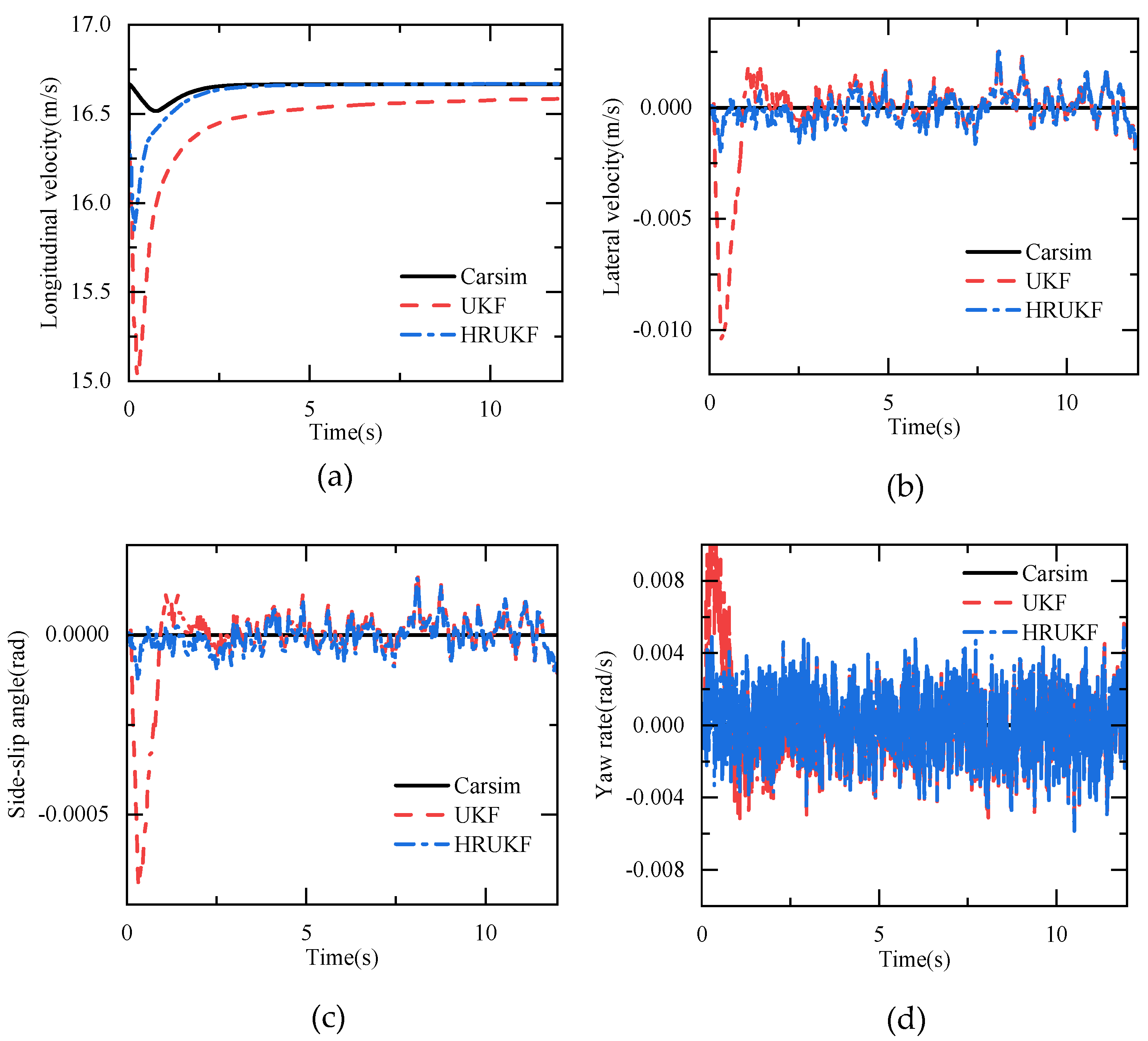
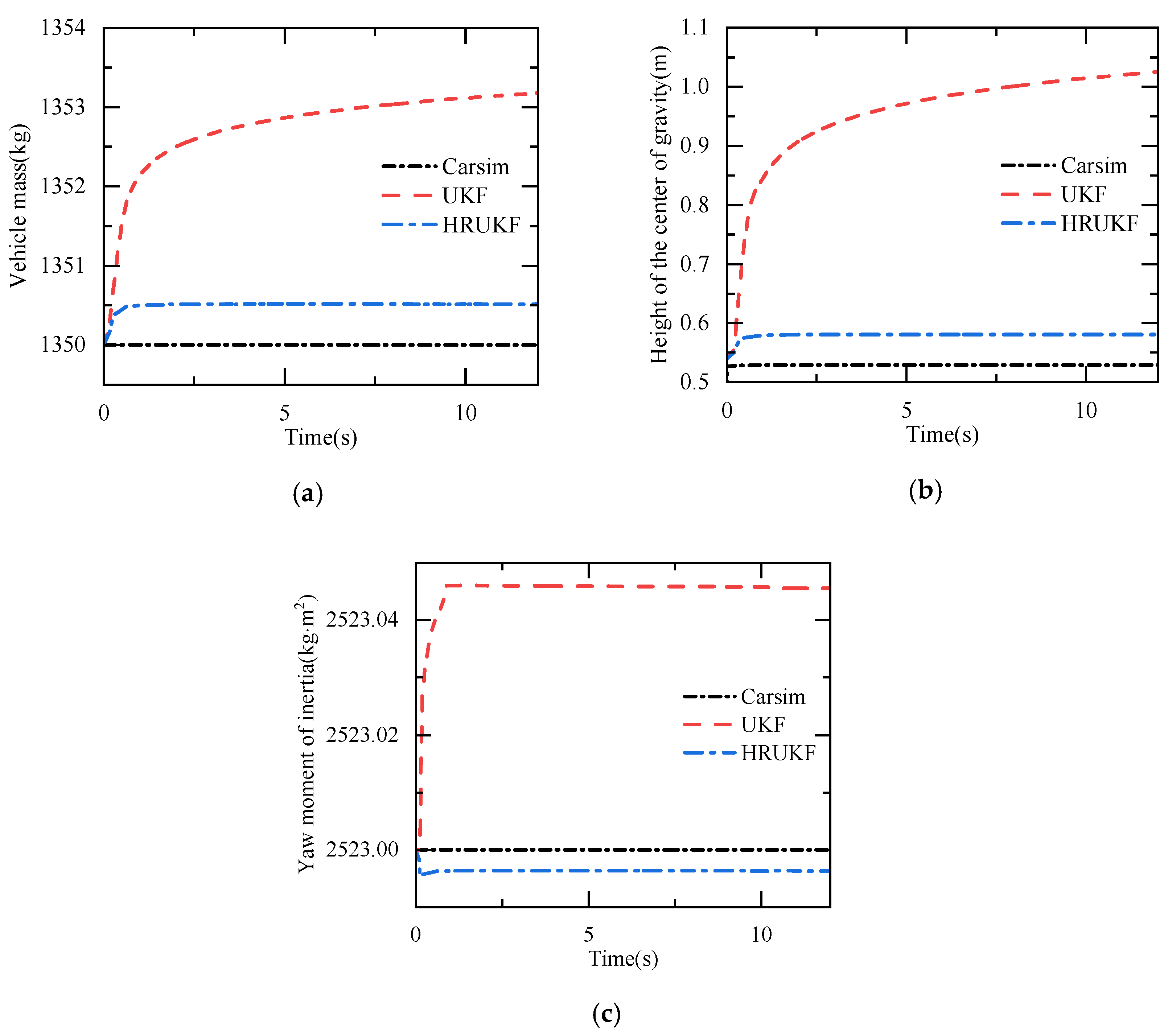
4.2. Simulation of Straight-Line Driving Condition at Constant Speed Condition
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, J.; Jia, G.; Yang, C. UKF-based adaptive variable structure observer for vehicle sideslip with dynamic correction. IET Control Theory Appl. 2016, 10, 1641–1652. [Google Scholar] [CrossRef]
- Jin, X.J.; Yin, G. Estimation of lateral tire–road forces and sideslip angle for electric vehicles using interacting multiple model filter approach. J. Frankl. Inst. 2015, 352, 686–707. [Google Scholar] [CrossRef]
- Wang, S.; Yu, Q.; Zhao, X. Vehicle sideslip angle estimation based on SVD-UPF algorithm. J. Intell. Fuzzy Syst. 2019, 37, 1–11. [Google Scholar] [CrossRef]
- Huang, B.; Wu, S.; Fu, X. State estimation of four-wheel independent drive electric vehicle based on adaptive unscented Kalman filter. Int. J. Electr. Hybrid Veh. 2017, 9, 151. [Google Scholar] [CrossRef]
- Wielitzka, M.; Dagen, M.; Ortmaier, T. Joint unscented Kalman filter for state and parameter estimation in vehicle dynamics. In Proceedings of the 2015 IEEE Conference on Control Applications (CCA), Sydney, NSW, Australia, 21–23 September 2015; pp. 1945–1950. [Google Scholar]
- Jiang, K.; Victorino, A.C.; Charara, A. Adaptive Estimation of Vehicle Dynamics through RLS and Kalman Filter Approaches. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems—(ITSC 2015), Gran Canaria, Spain, 15–18 September 2015. [Google Scholar]
- Hong, S.; Lee, C.; Borrelli, F. A Novel Approach for Vehicle Inertial Parameter Identification Using a Dual Kalman Filter. IEEE Trans. Intell. Transp. Syst. 2015, 16, 151–161. [Google Scholar] [CrossRef]
- Boada, B.L.; Garcia-Pozuelo, D.; Boada, M.J.L. A Constrained Dual Kalman Filter Based on pdf Truncation for Estimation of Vehicle Parameters and Road Bank Angle: Analysis and Experimental Validation. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1006–1016. [Google Scholar] [CrossRef]
- Seung, J.H.; Atiya, A.F.; Parlos, A.G. Identification of unknown parameter value for precise flow control of Coupled Tank using Robust Unscented Kalman filter. Int. J. Precis. Eng. Manuf. 2017, 18, 31–38. [Google Scholar] [CrossRef]
- Biase, F.D.; Lenzo, B.; Timpone, F. Vehicle Sideslip Angle Estimation for a Heavy-Duty Vehicle via Extended Kalman Filter Using a Rational Tyre Model. IEEE Access 2020, 8, 142120–142130. [Google Scholar] [CrossRef]
- Huber, P.J. Robust Estimation of a Location Parameter. Ann. Math. Stats 1964, 35, 73–101. [Google Scholar] [CrossRef]
- Chang, L.; Hu, B.; Chang, G. Huber-based novel robust unscented Kalman filter. IET Sci. Meas. Technol. 2012, 6, 502–509. [Google Scholar] [CrossRef]
- Hou, J.; He, H.; Yang, Y.; Gao, T.; Zhang, Y. A Variational Bayesian and Huber-Based Robust Square Root Cubature Kalman Filter for Lithium-Ion Battery State of Charge Estimation. Energies 2019, 12, 1717. [Google Scholar] [CrossRef]
- Xiong, L.; Shen, J.; Bi, X. A Huber based Unscented Kalman Filter Terrain Matching Algorithm for Underwater Autonomous Vehicle. In Proceedings of the 3rd International Conference on Computer Science and Application Engineering, Sanya, China, 22–24 October 2019. [Google Scholar]
- Wang, S.; Zhang, W.; Yin, C. Huber-based Unscented Kalman Filters with the q-gradient. IET Sci. Meas. Technol. 2017, 11, 380–387. [Google Scholar] [CrossRef]
- Liu, H.; Hu, F.; Su, J. Comparisons on Kalman-Filter-Based Dynamic State Estimation Algorithms of Power Systems. IEEE Access 2020, 1, 99. [Google Scholar] [CrossRef]
- Li, Y.; Hou, L.; Yang, Y. Huber’s M-Estimation-Based Cubature Kalman Filter for an INS/DVL Integrated System. Math. Probl. Eng. 2020, 2020, 1060672. [Google Scholar]
- Yu, A.; Liu, Y.; Zhu, J. An Improved Dual Unscented Kalman Filter for State and Parameter Estimation. Asian J. Control 2015, 18, 1427–1440. [Google Scholar] [CrossRef]
- Liu, Y.H.; Li, T.; Yang, Y.Y. Estimation of tire-road friction coefficient based on combined APF-IEKF and iteration algorithm. Mech. Syst. Signal Process. 2017, 88, 25–35. [Google Scholar] [CrossRef]
- Li, K.; Luo, Y.; Chen, H. State Estimation and Identification of Advanced Electric Vehicles; China Machine Press: Beijing, China, 2019; pp. 28–30. [Google Scholar]
- Dakhlallah, J.; Imine, H.; Sellami, Y. Heavy vehicle state estimation and rollover risk evaluation using Kalman Filter and Sliding Mode Observer. In Proceedings of the 2007 European Control Conference (ECC), Kos, Greece, 2–5 July 2007. [Google Scholar]
- Liu, X.; Deng, X.; He, Y.; Zheng, X.; Zeng, G. A Dynamic State-of-Charge Estimation Method for Electric Vehicle Lithium-Ion Batteries. Energies 2020, 13, 121. [Google Scholar] [CrossRef]
- Gao, Z.; Chen, S.; Zhao, Y.; Nan, J. Height Adjustment of Vehicles Based on a Static Equilibrium Position State Observation Algorithm. Energies 2018, 11, 455. [Google Scholar] [CrossRef]
- Zahid, T.; Li, W. A Comparative Study Based on the Least Square Parameter Identification Method for State of Charge Estimation of a LiFePO4 Battery Pack Using Three Model-Based Algorithms for Electric Vehicles. Energies 2016, 9, 720. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, J.; Zhang, L. Vehicle sideslip angle estimation for a four-wheel-independent-drive electric vehicle based on a hybrid estimator and a moving polynomial Kalman smoother. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2018, 233, 125–140. [Google Scholar] [CrossRef]
- Zhao, J.; Mili, L. Robust Unscented Kalman Filter for Power System Dynamic State Estimation with Unknown Noise Statistics. IEEE Trans. Smart Grid 2019, 10, 1215–1224. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Parameters | Variable(s) | Unit | Value(s) |
|---|---|---|---|
| Vehicle mass | m | kg | 1350 |
| Distance from c.g. to front axles | a | m | 1.056 |
| Distance from c.g. to rear axles | b | m | 1.555 |
| Front/rear track width | w | m | 1.54 |
| Height of center of gravity | m | 0.54 | |
| Moment of inertia around the Z axis at c.g. | 2523 | ||
| Wheel Effective Radius | R | m | 0.310 |
| Steering ratio | i | − | 25 |
| Tire longitudinal stiffness | kN/rad | 40 | |
| Tire lateral stiffness | kN/rad | 60 |
| RMSE | Parameters | UKF | HRUKF |
| Yaw rate | 0.0024 | 0.0017 | |
| Longitudinal velocity | 0.3132 | 0.1092 | |
| Lateral velocity | 0.0296 | 0.0297 | |
| Vehicle sideslip angle | 0.0018 | 0.0018 | |
| Vehicle mass | 2.7951 | 0.4677 | |
| Yaw moment of inertia | 0.0411 | 0.0037 | |
| Height of the center of gravity | 0.3868 | 0.0500 |
| RMSE | Parameters | UKF | HRUKF |
| Yaw rate | 0.0023 | 0.0016 | |
| Longitudinal velocity | 0.3130 | 0.1090 | |
| Lateral velocity | 0.0019 | 0.0007 | |
| Vehicle sideslip angle | 0.0001 | 0.0004 | |
| Vehicle mass | 2.8115 | 0.5057 | |
| Yaw moment of inertia | 0.0451 | 0.0037 | |
| Height of the center of gravity | 0.4343 | 0.0513 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wan, W.; Feng, J.; Song, B.; Li, X. Huber-Based Robust Unscented Kalman Filter Distributed Drive Electric Vehicle State Observation. Energies 2021, 14, 750. https://doi.org/10.3390/en14030750
Wan W, Feng J, Song B, Li X. Huber-Based Robust Unscented Kalman Filter Distributed Drive Electric Vehicle State Observation. Energies. 2021; 14(3):750. https://doi.org/10.3390/en14030750
Chicago/Turabian StyleWan, Wenkang, Jingan Feng, Bao Song, and Xinxin Li. 2021. "Huber-Based Robust Unscented Kalman Filter Distributed Drive Electric Vehicle State Observation" Energies 14, no. 3: 750. https://doi.org/10.3390/en14030750
APA StyleWan, W., Feng, J., Song, B., & Li, X. (2021). Huber-Based Robust Unscented Kalman Filter Distributed Drive Electric Vehicle State Observation. Energies, 14(3), 750. https://doi.org/10.3390/en14030750