
Phase Shifting Transformer Electromagnetic Model Dedicated for Power System Protection Testing in a Transient Condition



Abstract
:
1. Introduction
1.1. Principle of Using Phase Shifting Transformer in the Grid
1.2. General Information about Power System Protection Scheme for PST
- Dependability—protection relay (as a part of PSP) must trip when called upon, which means that in case of the fault inside the protected area (limited by used protection functions) is required to disconnect faulty object from the source supply (open circuit breaker) as fast as possible (for main protection time range for 220 kV network it is about 120 ms including circuit breaker time [4]) to reduce the detrimental effect, e.g., of short circuit currents.
- Security—protection relay must not-trip when not supposed to. In relation to the expected action from dependability can be referred by knowing that this time if the fault is outside of the protected area protection relay should identify this condition and not disconnect the healthy object (selectivity) from the network, which in the worst case, can cost losing stability and at the end lead to the blackout especially if considering disconnecting healthy PST where there was power exchange in a range of GVA. This can be as an indication to the cascaded disconnecting of the power plant near to the cross-border connection.
2. Construction and Operation of the Selected PST
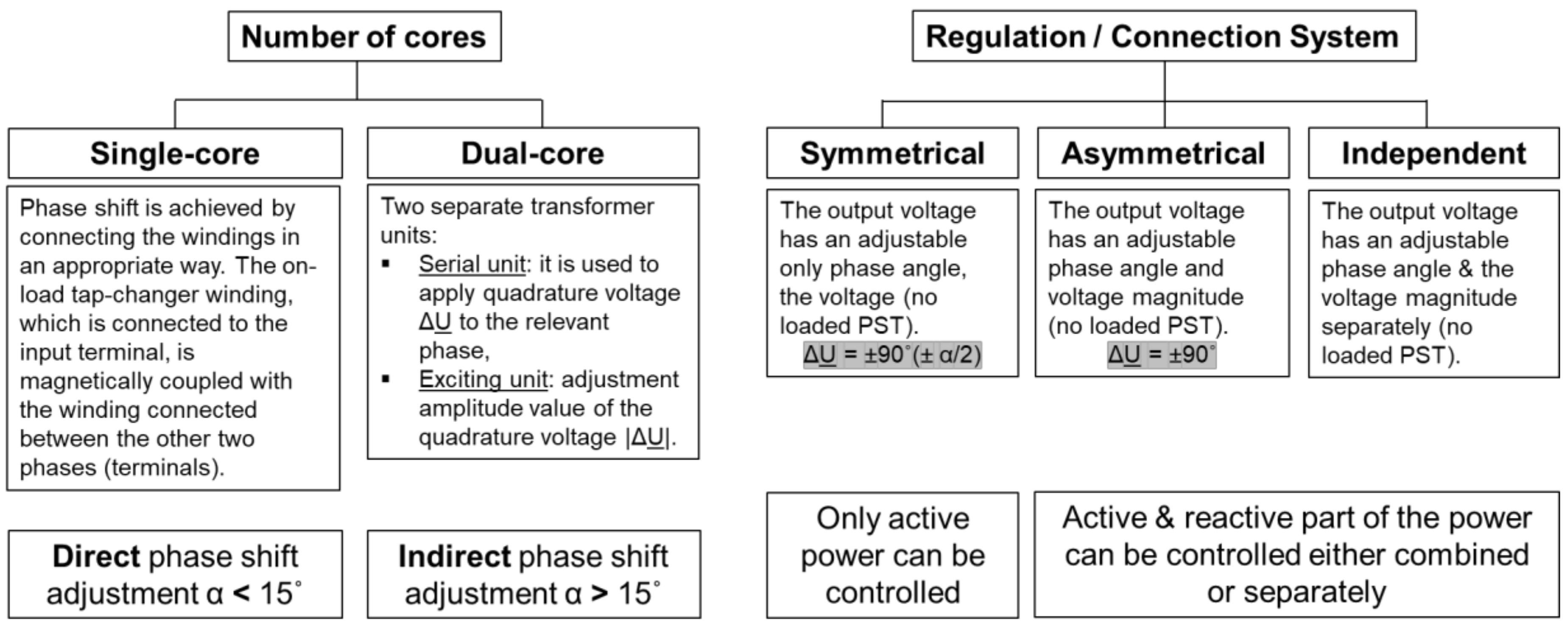
2.1. General Informations about PST and Their Types Division
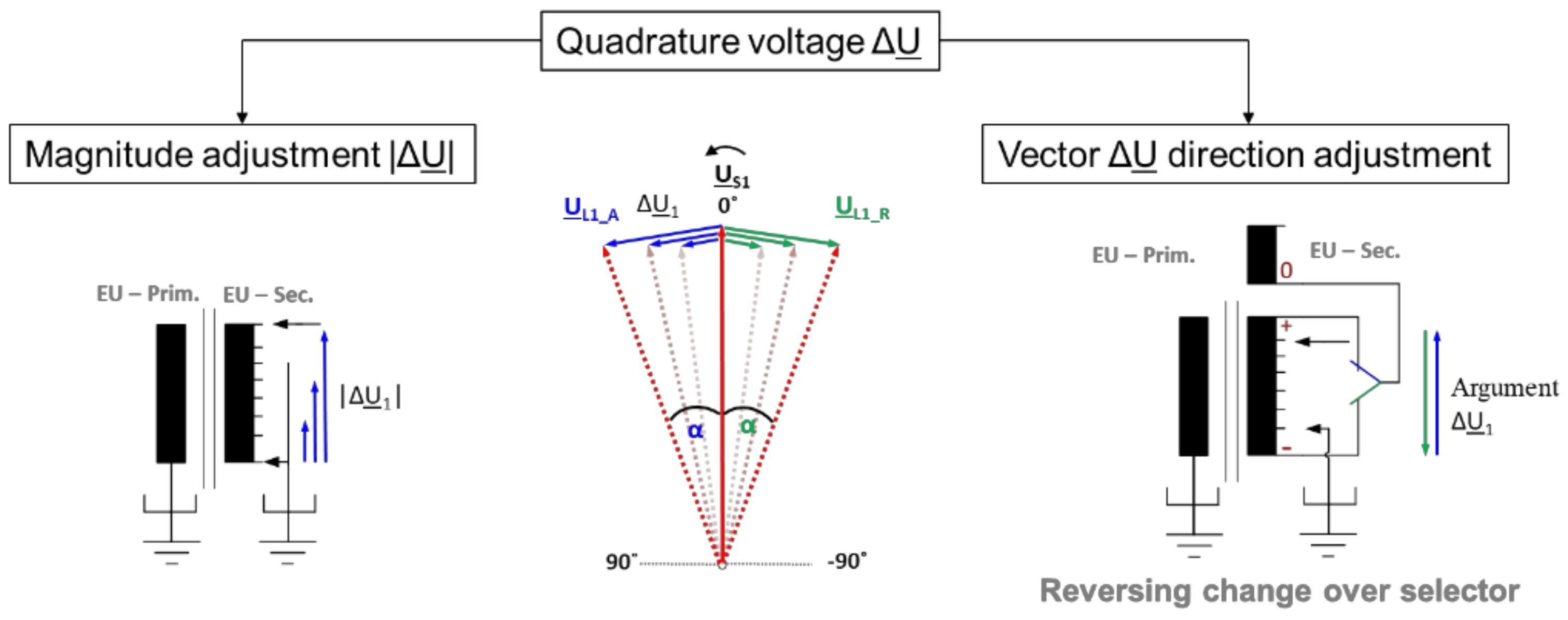
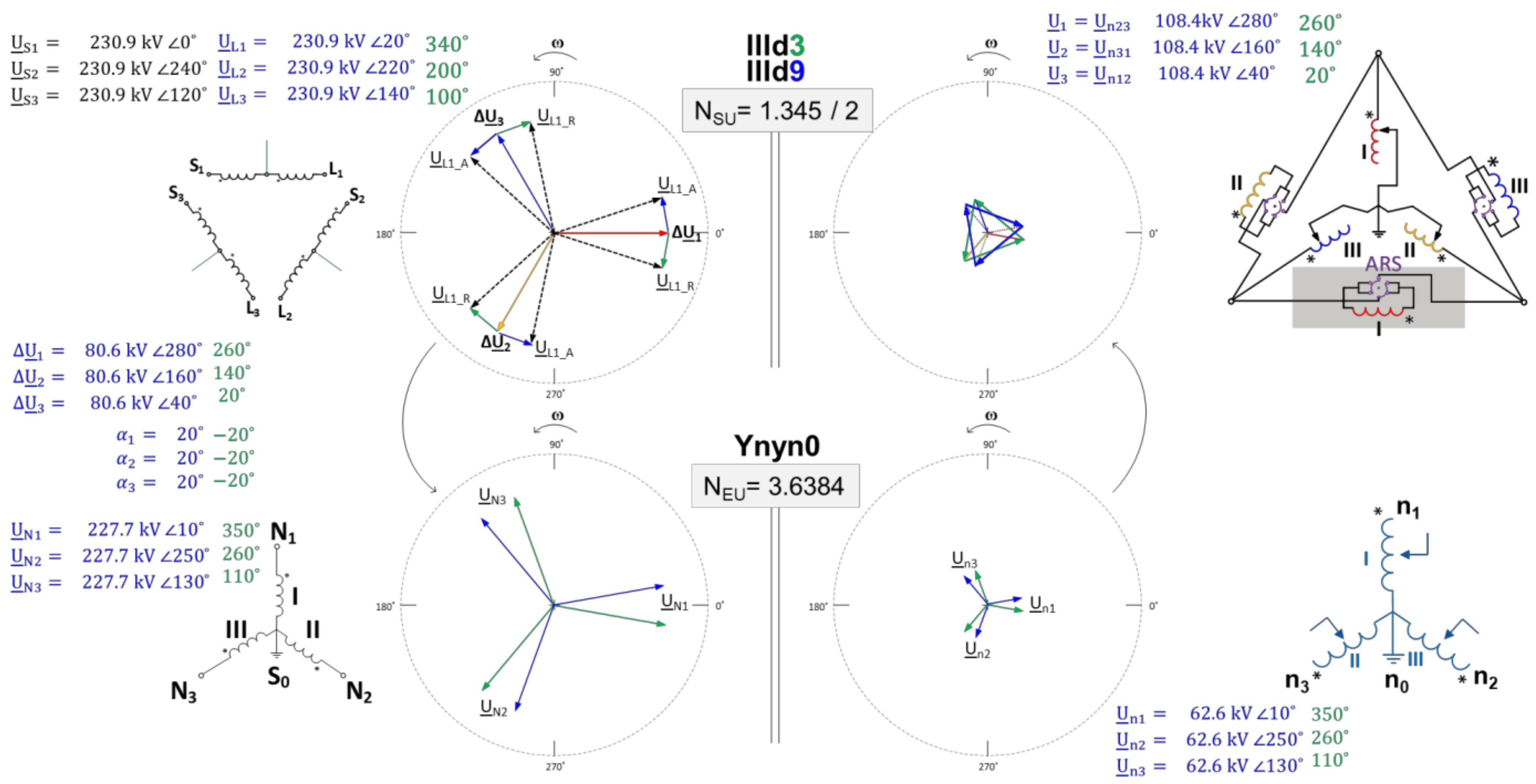
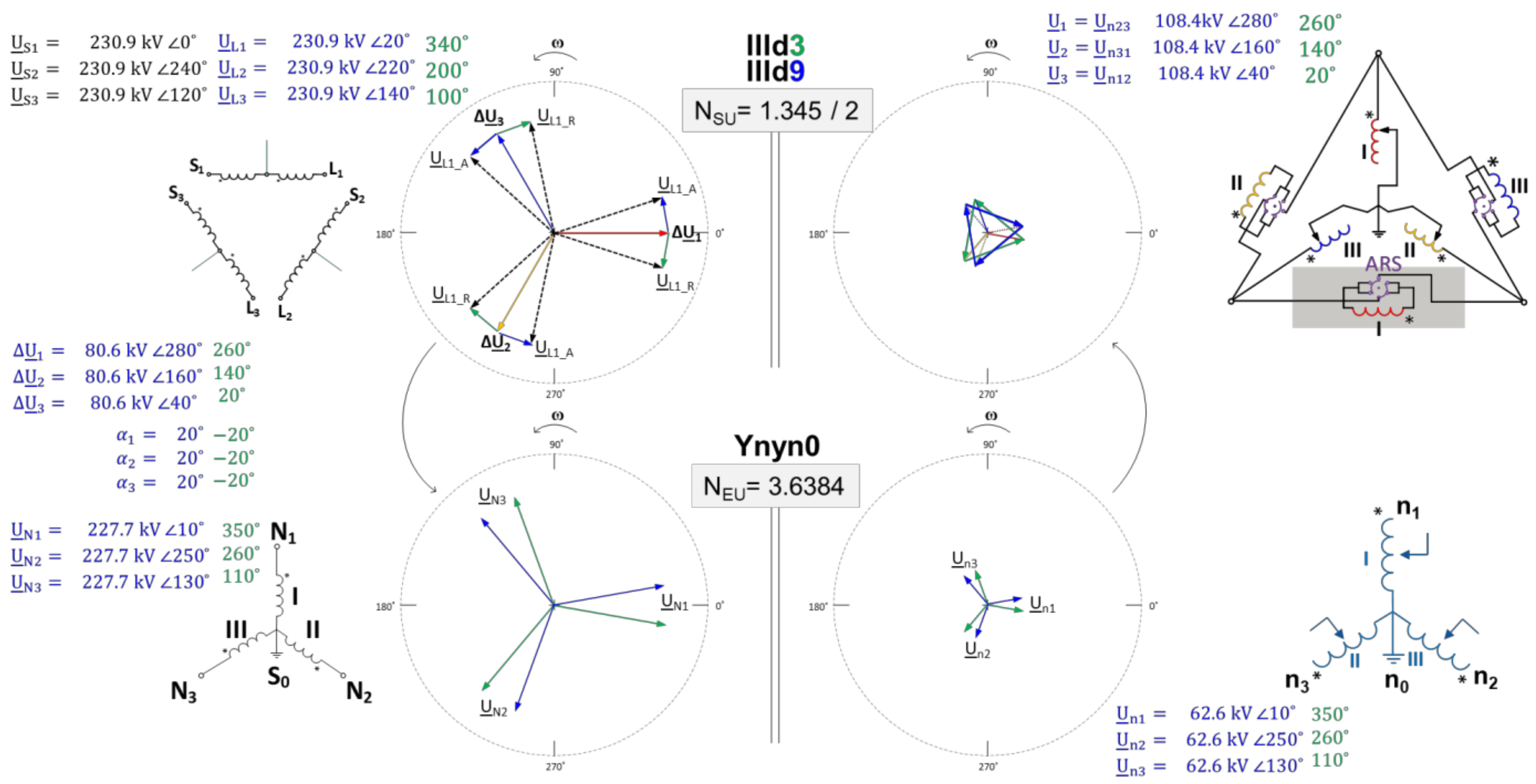
2.2. Voltage Distribution inside the PST (Based on Selected Type)
- Positive (advanced) αSL—is when voltage vector (phase 1, 2, 3) of load side UL is leading the relevant vector voltage (phase 1, 2, and 3) on the source side US.
- Negative (retard) αSL—is when voltage vector (phase 1, 2, 3) of load side UL is lagging the relevant vector voltage (phase 1, 2, and 3) on the source side US.
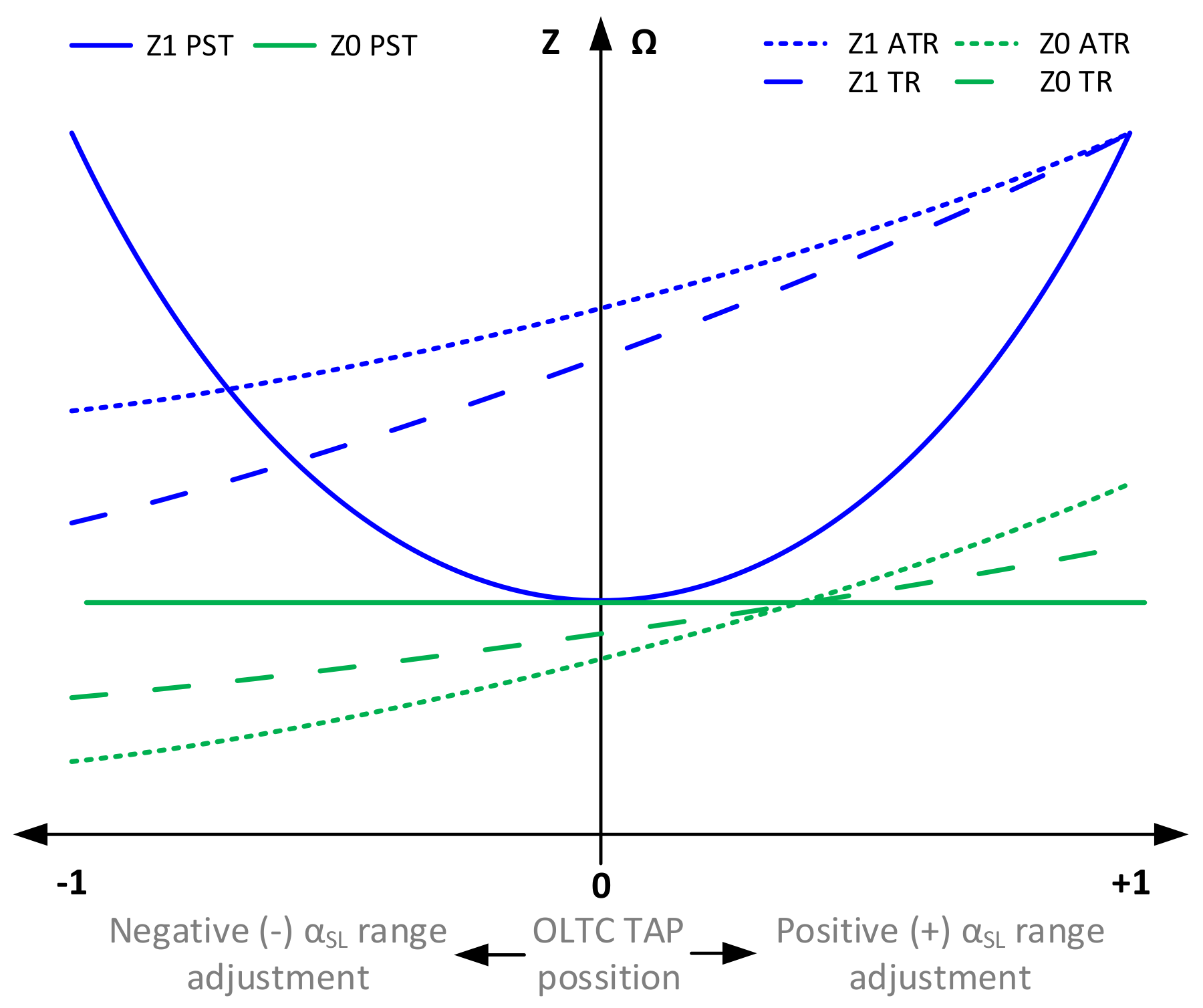
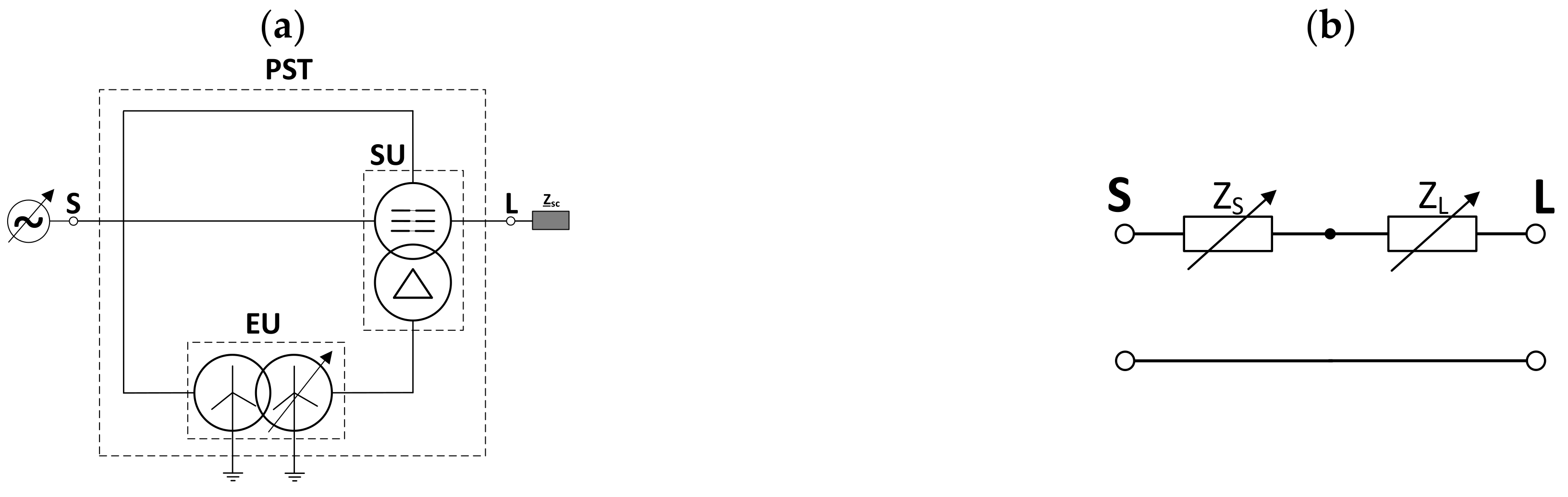
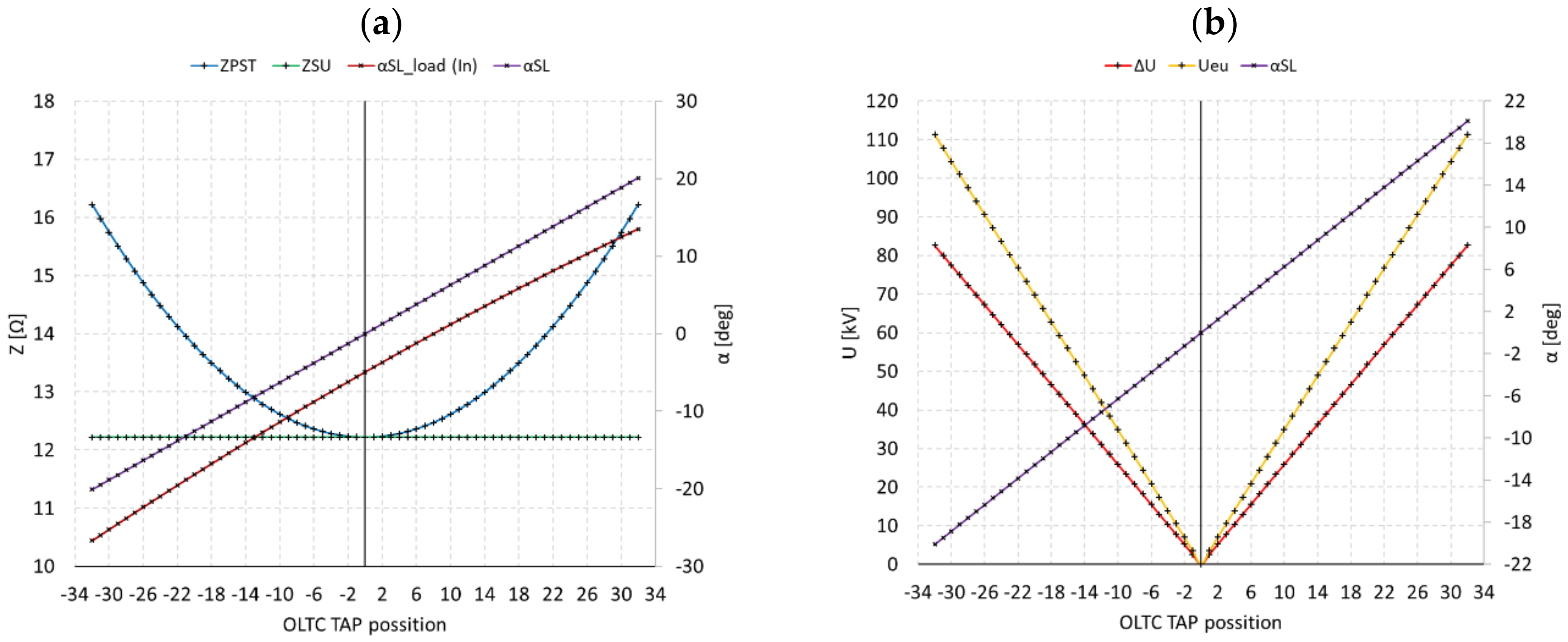
2.3. PST Load Condition Impact on the Phase Shift Adjustment
- ideal transformer without losses (internal impedance ZPST = 0 Ω), which represents the introduction of quadrature voltage ΔU;
- transformer with ratio 1:1 with losses (internal impedance ZPST ≠ 0 Ω), which represents voltage drop on PST during the load condition.
- for the advanced position “A” the actual phase shift αSL_A is lower compare to the phase shift in no-load condition αSL0:
- while for retard position “R” the actual phase shift αSL_R is higher compare to the phase shift in no-load condition αSL0:
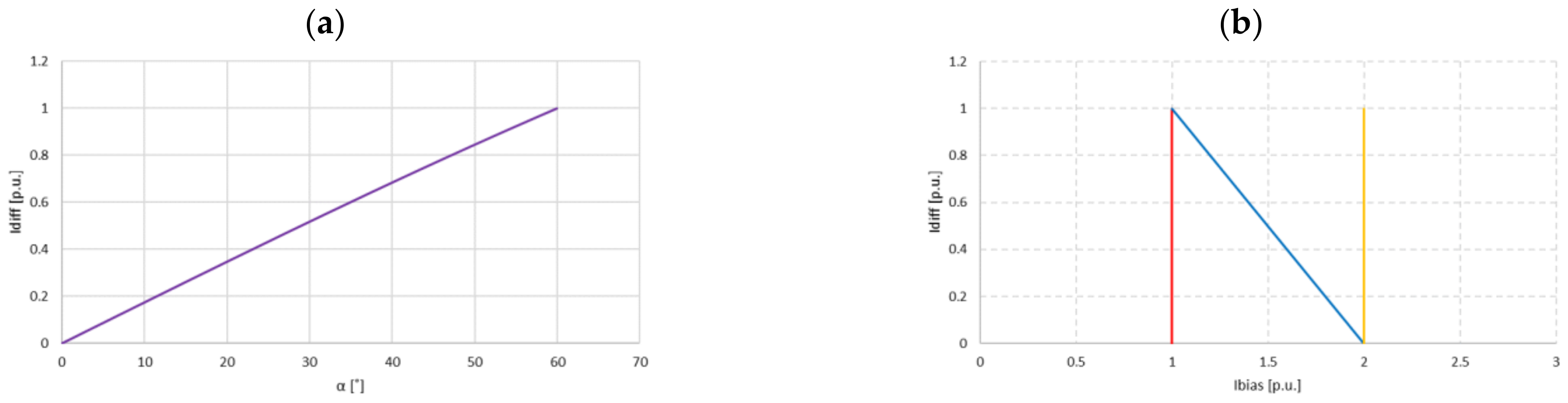
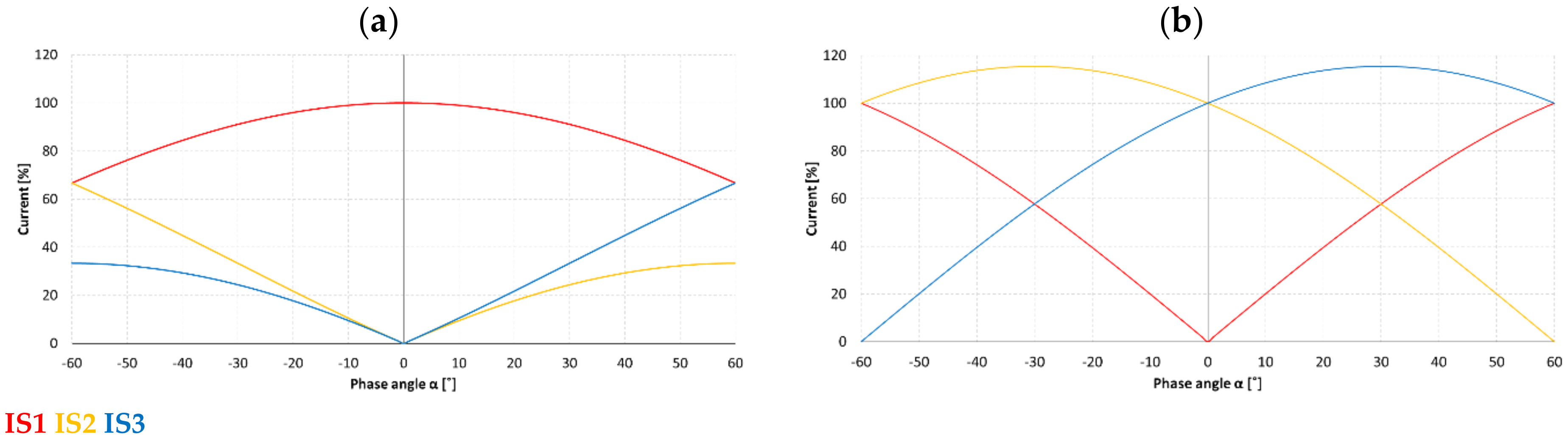
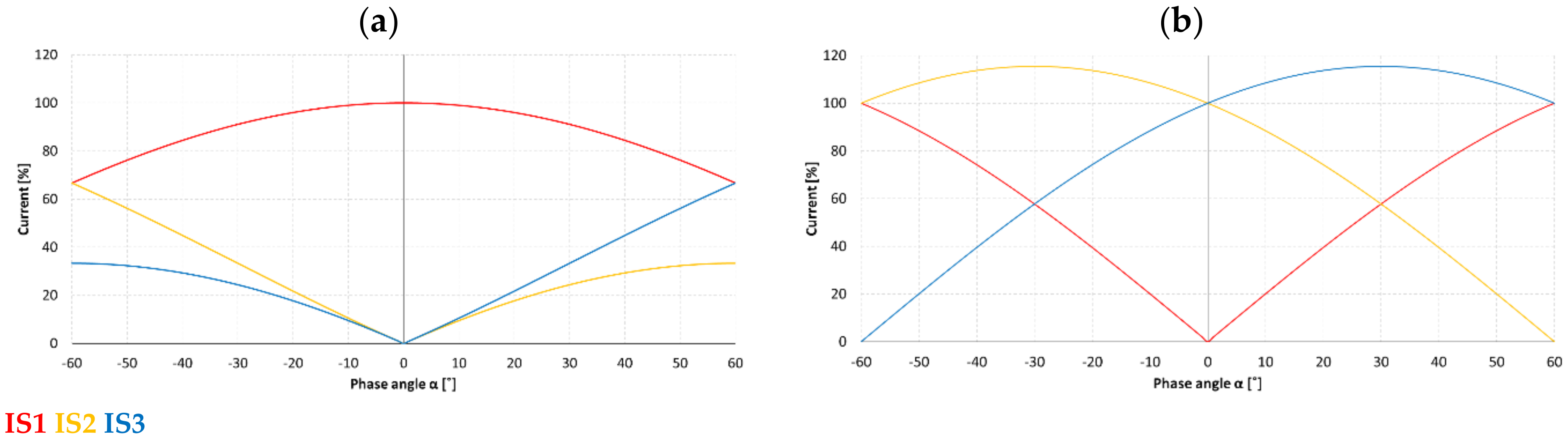
2.4. Current Distribution inside the PST during the Load Condition
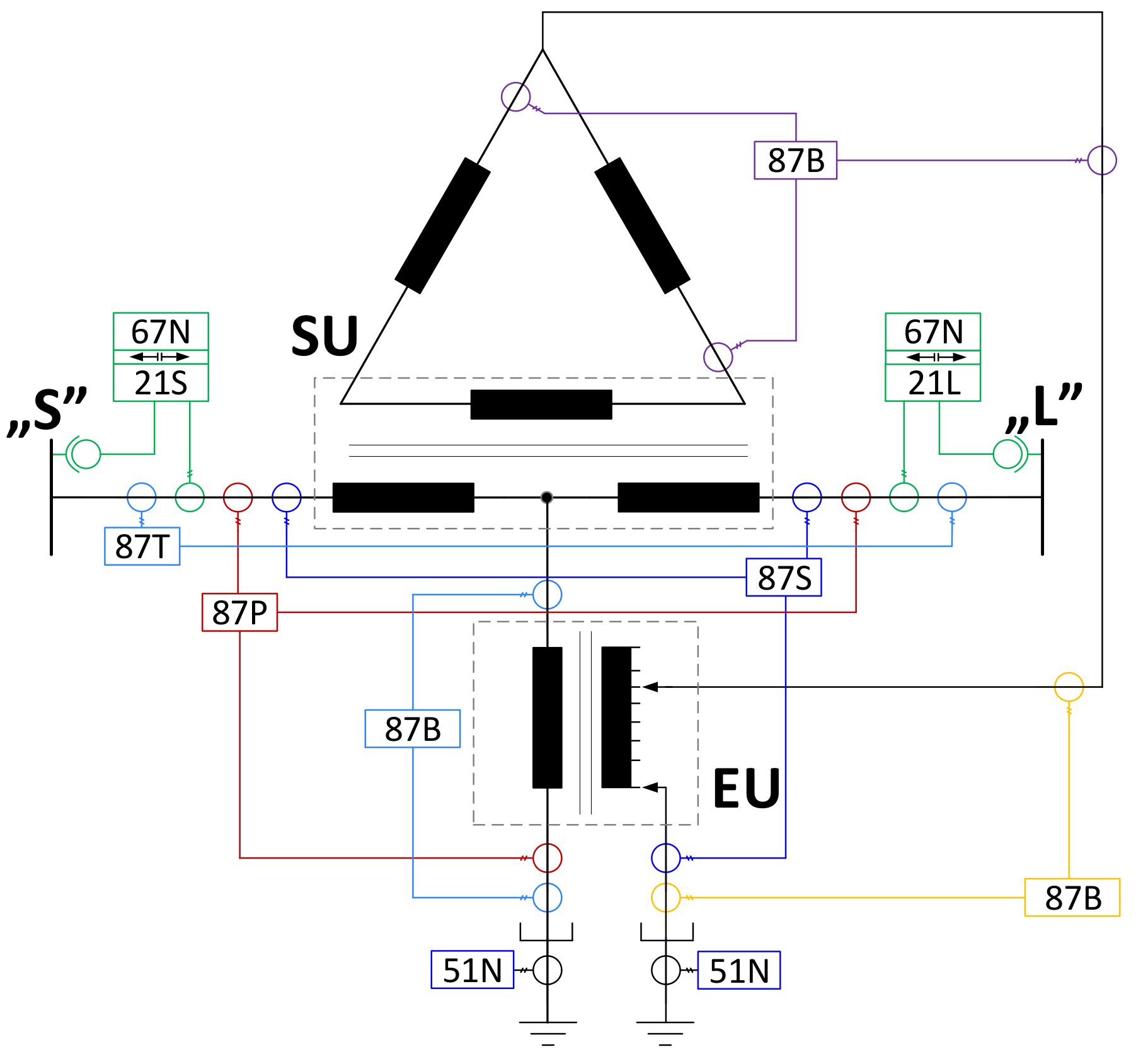
3. Power System Protection Scheme Applied for PST
- −
- 87P (P—Primary) is configured as a differential function based on the KCB (Kirchoff Current Balance) and using the current signals from source and load (SU) and primary side of EU,
- −
- 87S (S—Secondary) is configured as a differential function based on the ATB (Ampere Turns Balance) and using the current signals from source and load (SU) and secondary side of EU.
- −
- 87B (B—busbar) in some cases is used as an additional differential function based on KCB,
- −
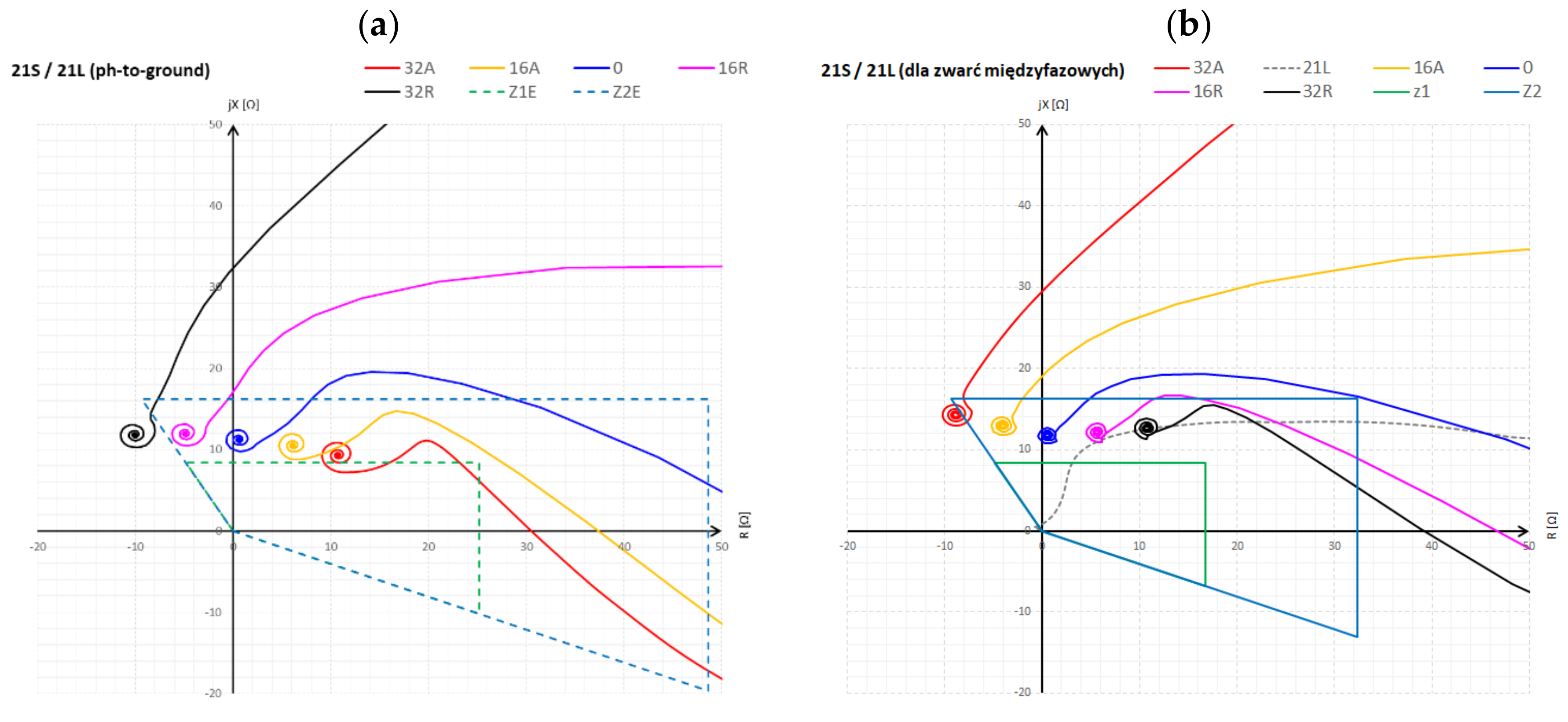
- 21S & 21L (S—Source and L—Load PST side) distance protection,
- −
- 51N (N—neutral) earth overcurrent function,
- −
- 67N directional earth overcurrent function.
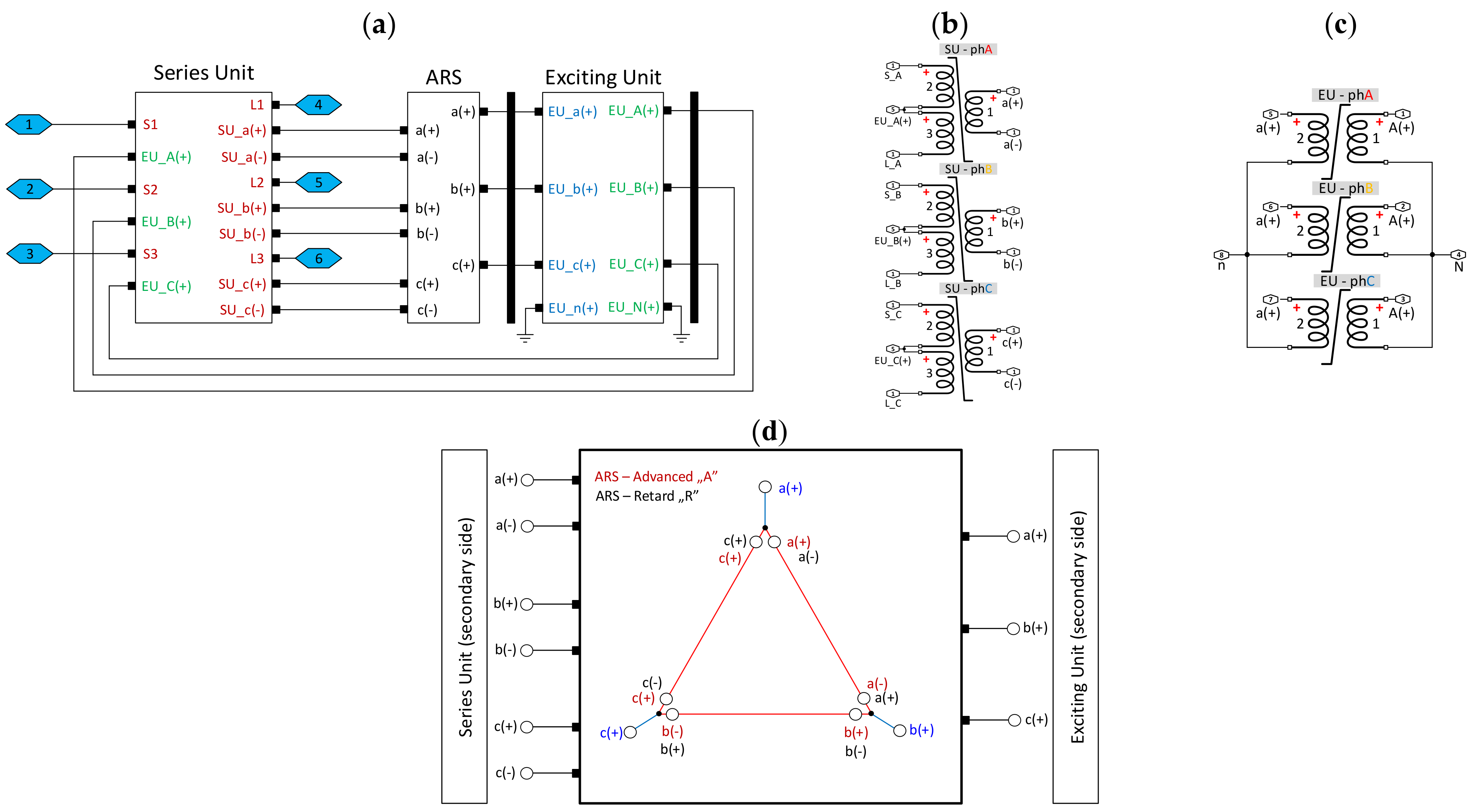
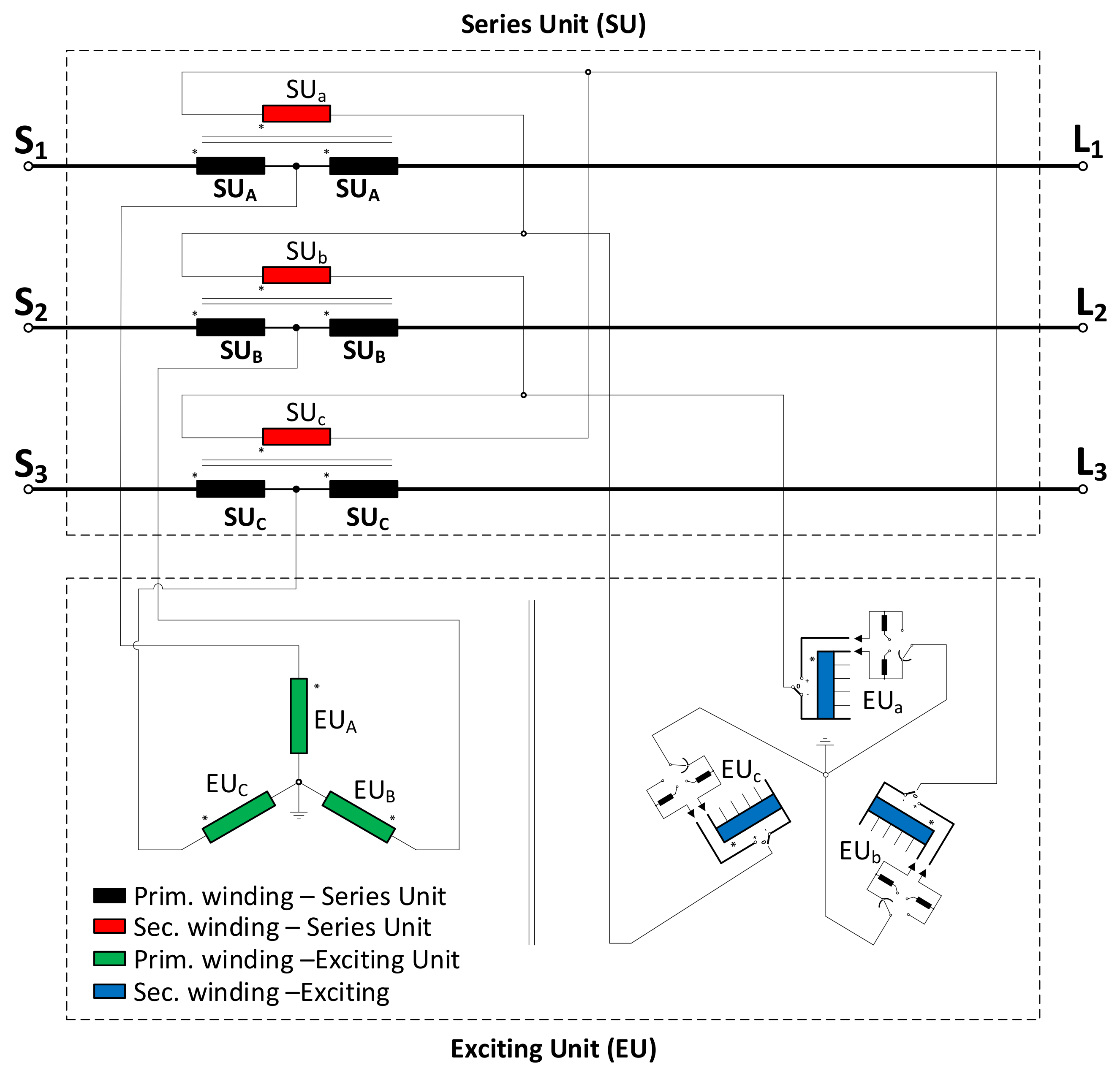
4. Electromagnetic Model of Symmetrical Dual-Tank PST
4.1. General Information about the Model
4.2. Series Unit Parameter Calculations for 3-Winding Transformer Model
- Primary and secondary winding of three-winding transformer will represent series winding of SU as it has two equal windings between which primary side of EU is connected;
- Tertiary winding will represent secondary side of SU connected in delta configuration.
4.3. Exciting Unit Parameters Calculations for 2-Winding Transformer Model
4.4. Compleate PST Model Description
5. Discussion of the Simulation Results
5.1. Steady State PST Model Verification
- according to the regulation type (symmetrical) by changing the EU OLTC TAP position will only lead to a change the phase shift αSL without changing the magnitude of voltage on the “L” side of the PST (test performed in accordance with [3]—tests shall be performed with the assumption of a symmetrical power source on the “S” side and no load on the PST).
- determination of short circuit voltage Usc% for the positive symmetric components in the order of compliance and zero for representative PST TAP positions (test performed according to [3]).
- determination of the full range of changes of αSL value in the PST operating state without load and with rated load (@1200 MVA cosφ = 1,0) for the extreme PST control positions (32A—maximum support αSL = +20.1°, 0—neutral position αSL = 0°, 32R—maximum blocking αSL = −20.1°).
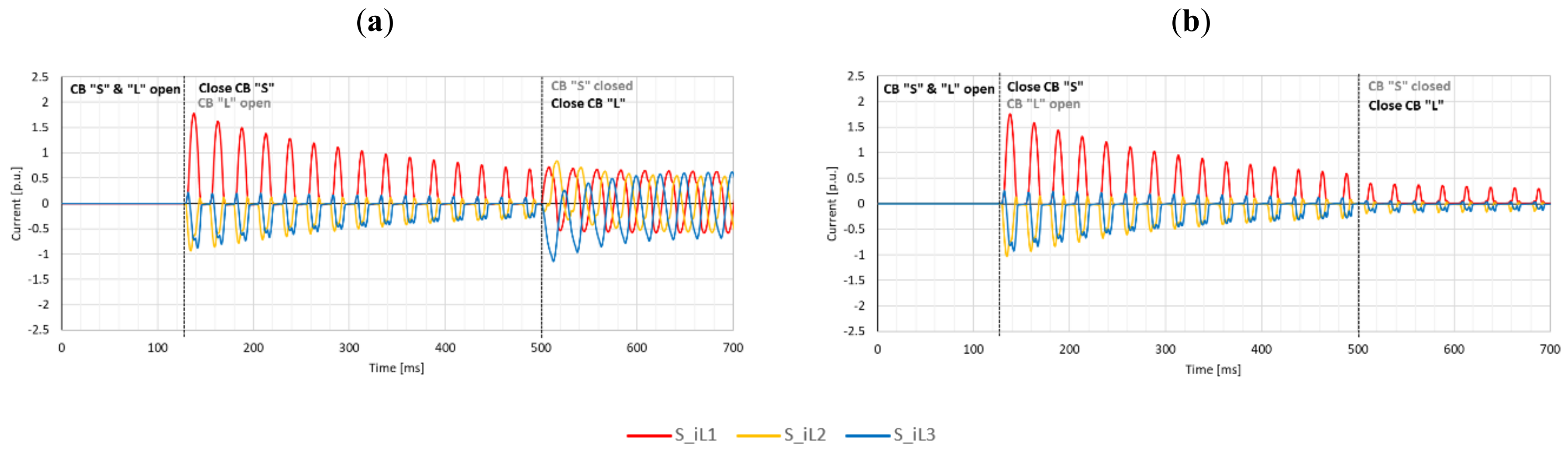
5.2. Transient PST Model Verification
6. Using PST Electromagnetic Model for Power System Protection Purposes
6.1. PSP Settings Calculations
- −
- different fault loops for extreme and neutral TAP positions: phase-to-ground (LG), phase-to-phase (LL), phase-to-phase with ground (LLG), 3-phase (LLL);
- −
- to check the CT’s possible saturations the maximum fault current (LLL) should be investigated for minimum PST impedance (neutral—0°);
- −
- for symmetrical dual core PST additionally for EU CT’s possible saturation should be investigated for maximum and minimum PST TAP position;
- −
- for external faults with maximum and minimum PST TAP position check possible overexcitation of the SU.
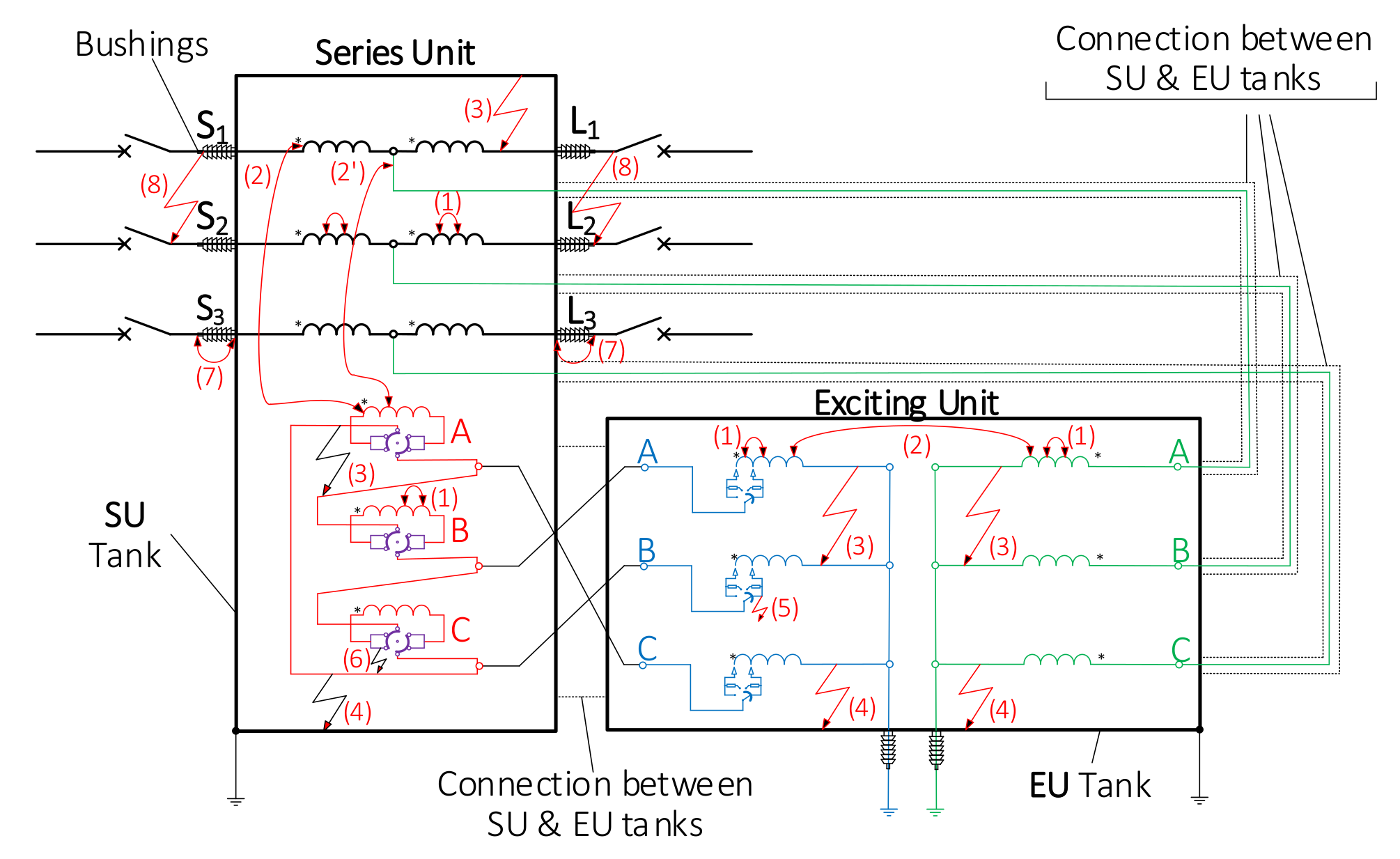
6.2. PSP Verification in a Transient Conditions
- −
- Internal faults (Figure 19): on bushings (LG, LL, LLG, and LLL) and inside the tank SU & EU with turn-to-ground and turn-to-turn faults for different fault position and for extreme and neutral PST TAP position
- −
- external faults (Figure 19): on busbar “S” and “L” PST side as on the relevant lines (LG, LL, LLG, and LLL) for extreme and neutral PST TAP position;
- (a)
- Differential protection (87):
- −
- trajectory of differential/restraint current in a differential plane for applied functions (87T or 87P or 87S) considering CT saturations;
- −
- energization current inrush studies;
- −
- saturation of SU (external faults).
- (b)
- Distance protection (21) and additional active functions:
- −
- trajectory of short circuit impedance in a complex impedance plane considering CT saturations;
- −
- zone reaches;
- −
- tele-protection scheme (if applied);
- −
- power swing blocking function
- (c)
- Overcurrent protection (51):
- −
- Time grading and current threshold with accordance to the line protection settings;
- −
- energization current inrush studies.
6.3. Example of Transient PSP Studies
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Anderski, T. Grid Development for Long Term Planning. e-Highway2050, Final Conference Brussels. 3–4 November 2015. Available online: http://www.pfbach.dk/firma_pfb/e_highway2050_booklet.pdf (accessed on 25 January 2021).
- Peirano, E. Technologies Data Base and Technological Innovation Needs Up to 2050. e-Highway2050, Final Conference Brussels. 3–4 November 2015. Available online: https://docs.entsoe.eu/baltic-conf/bites/www.e-highway2050.eu/fileadmin/documents/Results/D3_1_Technology_assessment_from_2030_to_2050.pdf (accessed on 25 January 2021).
- Jemielity, J.; Opala, K.; Ogryczak, T. System Sterowania Przesuwnikami Fazowymi SSPF w SE Mikułowa. IEN Gdańsk. 2014. Available online: http://www.ien.gda.pl/pl/offer/705 (accessed on 25 January 2021).
- Białas, T.; Dobroczek, A.; Dytry, H.; Lubosny, Z.; Machowski, J.; Tomica, M.; Romantowska, K.; Wroblewska, S.; Wojcik, A. Zasady Doboru i Nastawiania Zabezpieczeń Elementów Systemu Elektroenergetycznego Wysokiego Napięcia; Transmission System Operator Library PSE; WNT: Warsaw, Poland, 2010; ISBN 978-83-931931-0-3. [Google Scholar]
- Szubert, K. Influence of Phase Shift Transformer on Distance Protection’s Operation; Available online: http://pe.org.pl/articles/2013/7/40.pdf (accessed on 25 January 2021).
- Solak, K.; Rebizant, W.; Schiel, L. Modeling and Analysis of the Single-Core Phase Shifting Transformer and Its Differential Protection. In Proceedings of the 2015 Modern Electric Power Systems (MEPS), Wroclaw, Poland, 6–9 July 2015. [Google Scholar]
- Solak, K.; Rebizant, W.; Schiel, L. EMTP Testing of Selected PST Protection Schemes. In Proceedings of the 2014 15th International Scientific Conference on Electric Power Engineering (EPE), Brno, Czech Republic, 12–14 May 2014. [Google Scholar]
- Gajić, Z.; Podboj, M.; Traven, B.; Krašovec, A. When existing recommendations can let you down. In Proceedings of the 11th IET International Conference on Developments in Power Systems Protection (DPSP 2012), Birmingham, UK, 23–26 April 2012; ISBN 978-1-84919-620-8. [Google Scholar]
- Halinka, A.; Rzepka, P.; Szablicki, M. The “Propagation” of Unsymmetrical Faults by Phase Shifting Transformers (Przenoszenie zwarć niesymetrycznych przez przesuwniki fazowe). Przegląd Elektrotechniczny 2017, 93, 109–112. [Google Scholar]
- Thomson, M.J.; Miller, H.; Burger, J. AEP Experience with Protection of Three Delta/Hex Phase Angle Regulating Transformers. In Proceedings of the 60th Annual Georgia Tech Protective Relaying Conference, Atlanta, GA, USA, 2–5 May 2006. [Google Scholar]
- Tziouvaras, D.A.; Jimenez, R. 138 kV phase shifting transformer protection: EMTP modeling and model power system testing. In Proceedings of the Eighth IEE International Conference on Developments in Power System Protection, Amsterdam, The Netherlands, 5–8 April 2004; Volume 1, pp. 343–347. [Google Scholar]
- Cook, B.; Thomson, M.J.; Garg, K.; Malichkar, M. Phase-Shifting Transformer Control and Protection Settings Verification. In Proceedings of the 2018 71st Annual Conference for Protective Relay Engineers (CPRE), College Station, TX, USA, 26–29 March 2018. [Google Scholar] [CrossRef]
- Bednarczyk, T.; Halinka, A.; Rzepka, P.; Szablicki, M. Analiza działania zabezpieczenia podimpedancyjnego dwukadziowego symetrycznego przesuwnika fazowego. Zesz. Nauk. Wydziału Elektrotechniki Autom. Politech. Gdan. 2017, 53, 1–4. [Google Scholar]
- Aghdam, H.N. Analysis of Phase-Shifting Transformer (PST), on Congestion management and Voltage Profile in Power System by MATLAB/Simulink Toolbox. Res. J. Appl. Sci. Eng. Technol. 2011, 3, 650–659, ISSN 2040-7467. [Google Scholar]
- Youssef, R.D. Phase Shifting Transformer in load flow and short-circuit analysis: Modelling and control. IEE Proc. C 1993, 140, 331–336. [Google Scholar] [CrossRef]
- Entsoe. Phase Shifting Transformer Modelling; Version 1.0.0. CGMES V2.4.14; Available online: https://eepublicdownloads.entsoe.eu/clean-documents/CIM_documents/Grid_Model_CIM/ENTSOE_CGMES_v2.4_28May2014_PSTmodelling.pdf (accessed on 25 January 2021).
- IEC/IEEE 60076-57-1202: Power Transformers—Part 57-1202: Liquid Immersed Phase-Shifting Transformers. Available online: https://ieeexplore.ieee.org/document/7932247 (accessed on 25 January 2021).
- IEEE Std. C57.135-2001. Guide for the Application, Specification, and Testing of Phase-Shifting Transformers. Available online: https://ieeexplore.ieee.org/document/1009183 (accessed on 25 January 2021).
- Orosz, T.; Tamus, Z.Á. Impact of short-circuit impedance and tap changing method selection on the key-design parameters of core-form power transformers. Electr. Eng. 2018, 100, 1631–1637. [Google Scholar] [CrossRef]
- IEEE Std. C37.91-2000. IEEE Guide for Protective Relay Applications to Power Transformers. Available online: https://ieeexplore.ieee.org/document/875997 (accessed on 25 January 2021).
- IEEE Std. C37.245-2018. IEEE Guide for the Application of Protective Relaying for Phase-Shifting Transformers. Available online: https://ieeexplore.ieee.org/document/8721751/definitions#definitions (accessed on 25 January 2021).
- Ibrahim, M.A.; Plumptre, F.P. Protection of Phase Angle Regulating Transformers; PSRC WG K1; IEEE Special Publication: Middlesex, NJ, USA, 1999; Available online: https://www.pes-psrc.org/kb/published/reports/Protection_of_PAR_Transformers_Report.pdf (accessed on 25 January 2021).
- Jabłoński, M. Podstawowe parametry i schemat zastępczy transformatora do przesuwania fazy. In Transformatory Energetyczne i Specjalne; ZREW: Kazimierz Dolny, Poland, 2002. [Google Scholar]
- Kacejko, P.; Machowski, J. Zwarcia w Systemach Elektroenergetycznych; WNT: Warszawa, Poland, 2012. [Google Scholar]
- Szablicki, M.; Rzepka, P.; Halinka, A.; Sowa, P. Concept of Control System for Optimal Switching of Phase Shifting Transformers. In Proceedings of the 12th International Conference, Mikulov, Czech Republic, 21–23 May 2018; pp. 1–5. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Parameter | Unit |
|---|---|---|
| Rated power | Sr | 1200 MVA |
| Rated voltage | Ur | 410 kV |
| Rated current | Ir | 1690 A |
| Number of turns SUPrim/delta winding | 1.345 | |
| Vector group | IIId S0-3/9 | |
| Phase shift adjustment (63 TAPs ±32 and 0) | OLTC + ARS in delta winding | |
| Phase adjustment angle range in no-load condition | αSL0 | ±20.1° |
| Phase adjustment angle range in load condition (1200 MVA and cosφ = 1) | αSL_load | +13.4° −26.7° |
| Short-circuit voltage in accordance with the characteristic OLTC/ARS positions | uk% αSL(−) | 11.58% |
| uk% αSL(0) | 8.71% | |
| uk% αSL(+) | 11.58% | |
| Load losses ΔPCu in accordance with the characteristic OLTC/ARS positions | αSL(−) | 2052 W |
| αSL(0) | 995.9 W | |
| αSL(+) | 2048 W | |
| Short circuit zero-sequence impedance | Z0 | 12.23 Ω |
| Unit | Rated Voltage | Rated Power | Short Circuit Voltage | Vector Group |
|---|---|---|---|---|
| UPn/USn/UTn | SPn/SSn/STn | Usc_PS%/Usc_PT%/Usc_ST% | ||
| kV | GVA | % | ||
| SU | 410/410/608.5 | 1200/1200/1200 | 4.36/4.36/2.18 @1.2 GVA | III/III/d3–9 |
| EU | 410/115 | 419 | 8.56 @0.419 GVA | YNyn0 |
| Option | OLTC/ARS TAP Position | ||
|---|---|---|---|
| 32(A) | 0 | −32(R) | |
| Adjustment angle αSL (no-load condition) | +20.1° | 0.1° | −20.1° |
| US/UL ratio (no-load condition) | 1.02 | 1.02 | 1.02 |
| Adjustment range of phase shift αSL in load condition (1200 MVA) | +13.4° | −5.1° | −26.7° |
| Determined short circuit voltage Usc% | 11.58% | 8.71% | 11.58% |
| Zero-sequence impedance | 12.22 Ω | ||
| α | IEEE | PST Model | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| IS (%) | IL (%) | IS (%) | IL (%) | Deviation (%) | |||||||||||
| S1 | S2 | S3 | L1 | L2 | L3 | S1 | S2 | S3 | L1 | L2 | L3 | S1 | S2 | S3 | |
| −20° | 95.97 | 21.75 | 17.73 | 100 | 0 | 0 | 95.97 | 21.76 | 17.73 | 100 | 0 | 0 | 0.000 | 0.015 | 0.017 |
| −10° | 98.98 | 10.53 | 9.51 | 100 | 0 | 0 | 98.99 | 10.53 | 9.51 | 100 | 0 | 0 | 0.005 | 0.003 | 0.006 |
| 0° | 100 | 0 | 0 | 100 | 0 | 0 | 100.0 | 0.04 | 0.03 | 100 | 0 | 0 | 0.000 | 0.000 | 0.000 |
| +10° | 98.98 | 9.51 | 10.53 | 100 | 0 | 0 | 98.99 | 9.51 | 10.53 | 100 | 0 | 0 | 0.005 | 0.006 | −0.003 |
| +20° | 95.97 | 17.73 | 21.75 | 100 | 0 | 0 | 95.97 | 17.73 | 21.75 | 100 | 0 | 0 | 0.000 | 0.017 | 0.012 |
| α | IEEE | PST Model | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| IS (%) | IL (%) | IS (%) | IL (%) | Deviation (%) | |||||||||||
| S1 | S2 | S3 | L1 | L2 | −L3 | S1 | S2 | S3 | L1 | L2 | −L3 | S1 | S2 | S3 | |
| −20° | 39.49 | 113.71 | 74.22 | 0 | 100 | 100 | 39.50 | 113.72 | 74.22 | 0 | 100 | 100 | 0.017 | 0.007 | 0.002 |
| −10° | 20.05 | 108.50 | 88.45 | 0 | 100 | 100 | 20.05 | 108.5 | 88.45 | 0 | 100 | 100 | 0.002 | 0.004 | 0.002 |
| 0° | 0 | 100 | 100 | 0 | 100 | 100 | 0.00 | 100.03 | 99.96 | 0 | 100 | 100 | 0.000 | 0.039 | −0.04 |
| +10° | 20.05 | 88.45 | 108.50 | 0 | 100 | 100 | 20.05 | 88.45 | 108.51 | 0 | 100 | 100 | 0.002 | 0.002 | 0.004 |
| +20° | 39.49 | 74.202 | 113.71 | 0 | 100 | 100 | 39.50 | 74.22 | 113.72 | 0 | 100 | 100 | 0.017 | 0.002 | 0.007 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bednarczyk, T.; Szablicki, M.; Halinka, A.; Rzepka, P.; Sowa, P. Phase Shifting Transformer Electromagnetic Model Dedicated for Power System Protection Testing in a Transient Condition. Energies 2021, 14, 627. https://doi.org/10.3390/en14030627
Bednarczyk T, Szablicki M, Halinka A, Rzepka P, Sowa P. Phase Shifting Transformer Electromagnetic Model Dedicated for Power System Protection Testing in a Transient Condition. Energies. 2021; 14(3):627. https://doi.org/10.3390/en14030627
Chicago/Turabian StyleBednarczyk, Tomasz, Mateusz Szablicki, Adrian Halinka, Piotr Rzepka, and Paweł Sowa. 2021. "Phase Shifting Transformer Electromagnetic Model Dedicated for Power System Protection Testing in a Transient Condition" Energies 14, no. 3: 627. https://doi.org/10.3390/en14030627
APA StyleBednarczyk, T., Szablicki, M., Halinka, A., Rzepka, P., & Sowa, P. (2021). Phase Shifting Transformer Electromagnetic Model Dedicated for Power System Protection Testing in a Transient Condition. Energies, 14(3), 627. https://doi.org/10.3390/en14030627