
Application of Electrical Tomography Imaging Using Machine Learning Methods for the Monitoring of Flood Embankments Leaks

 , , , and
, , , and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Electrical Tomography
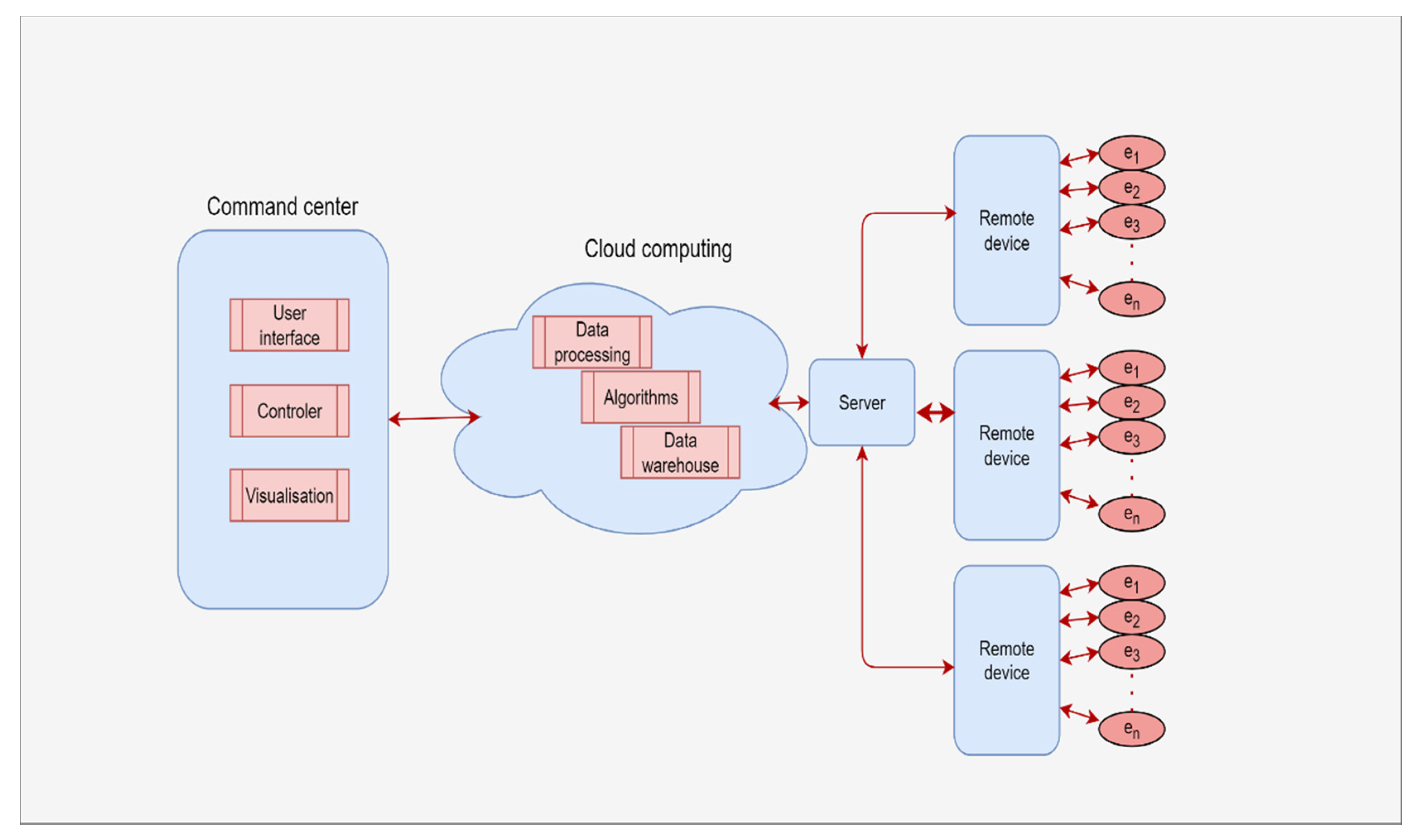
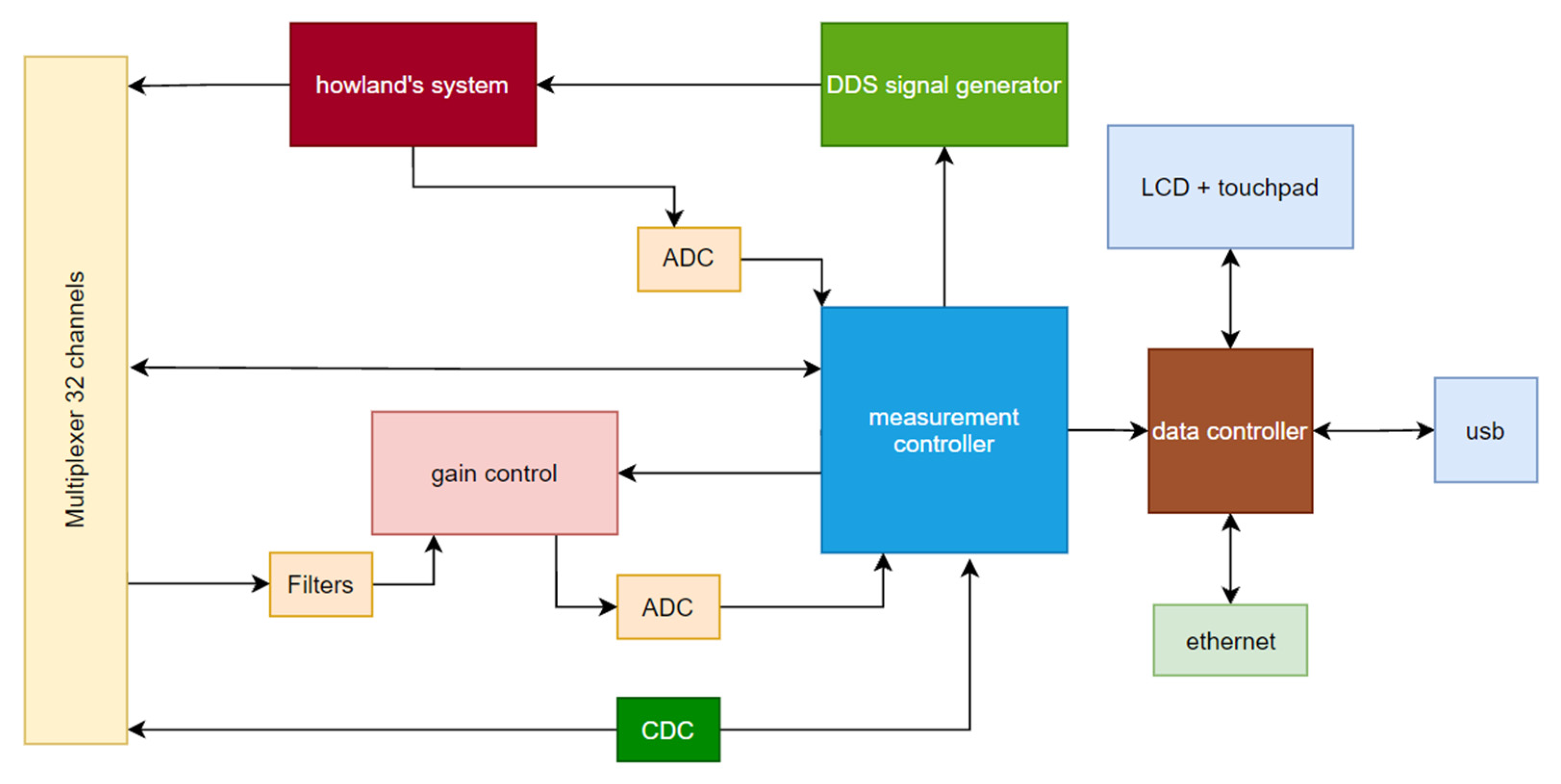
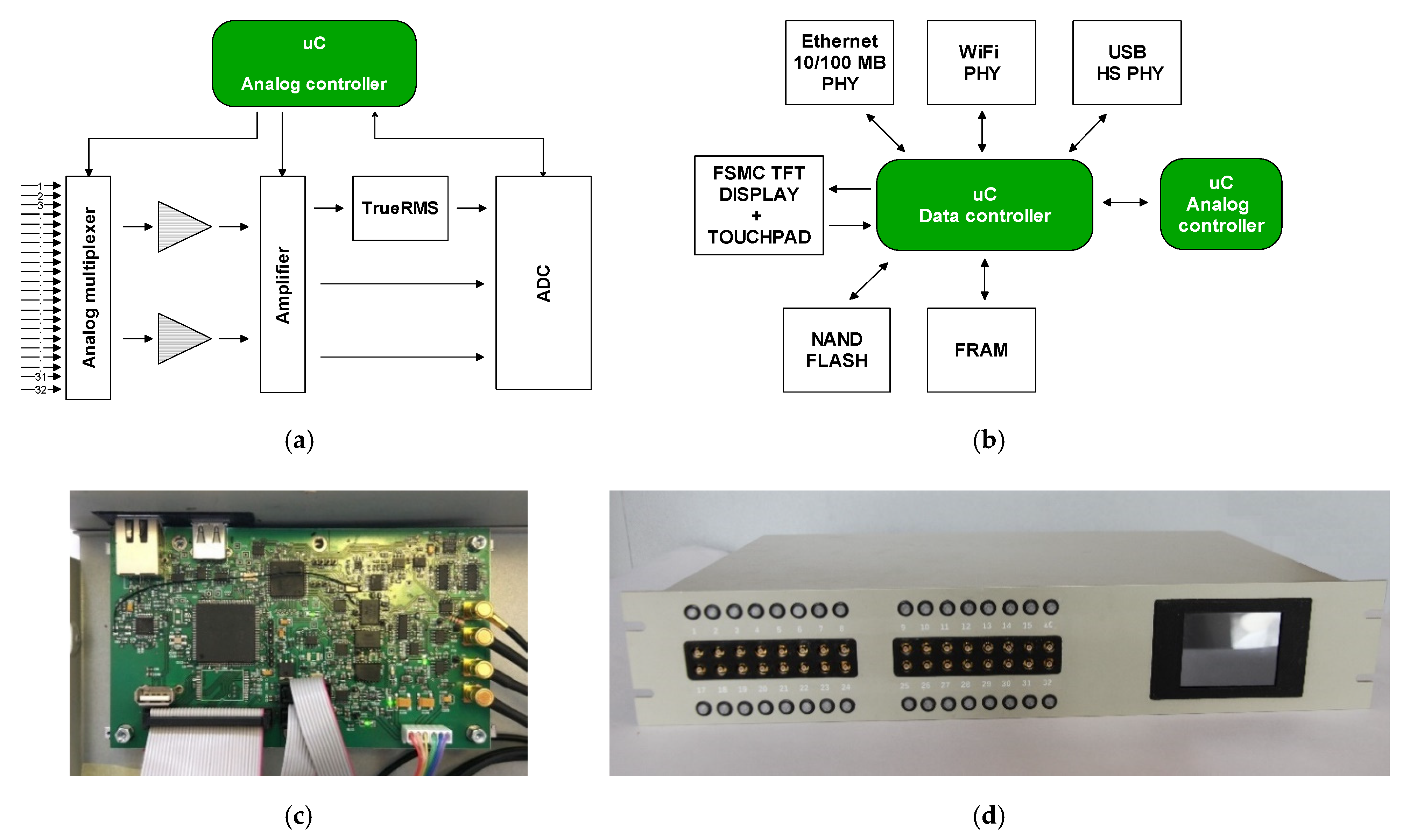
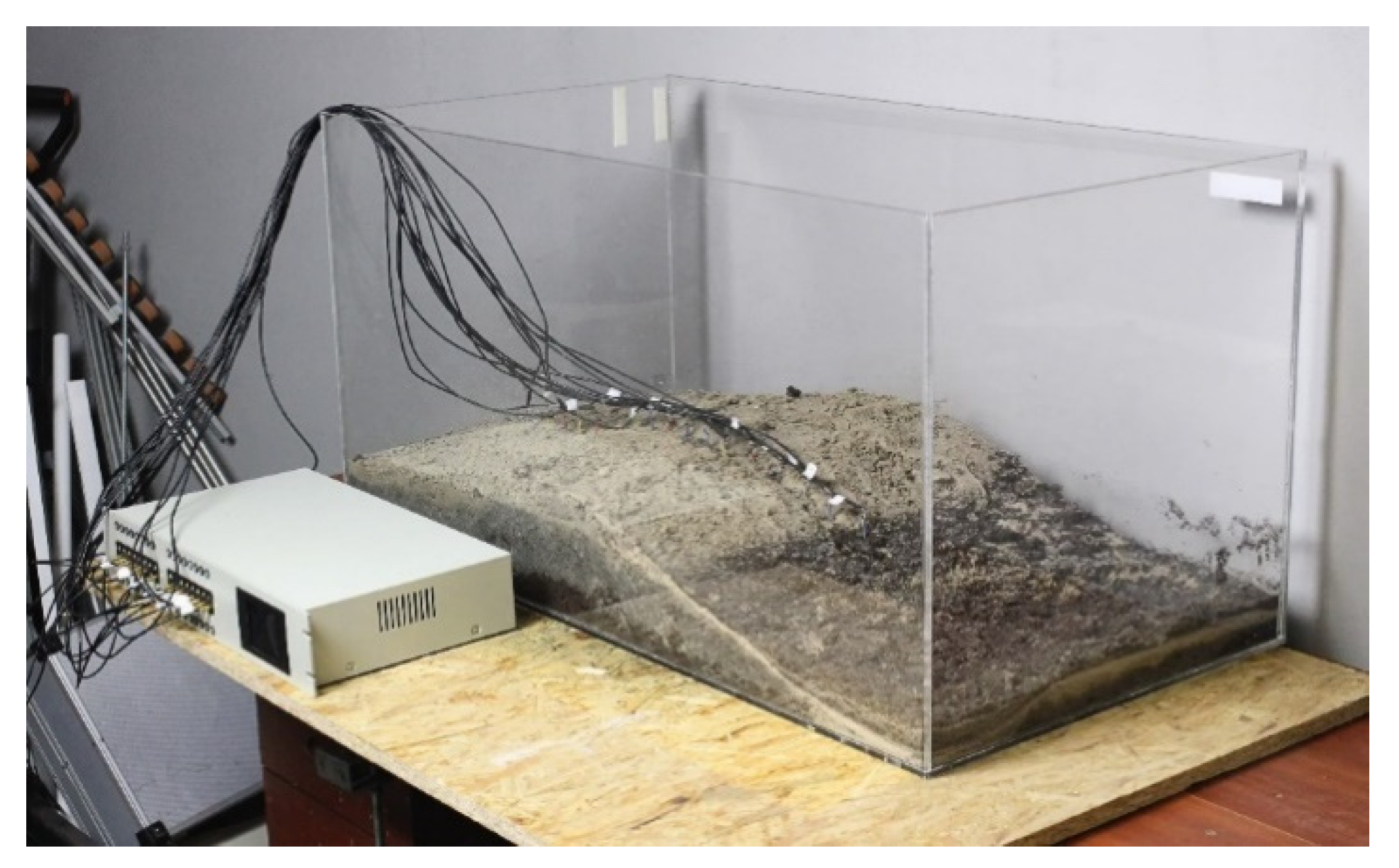
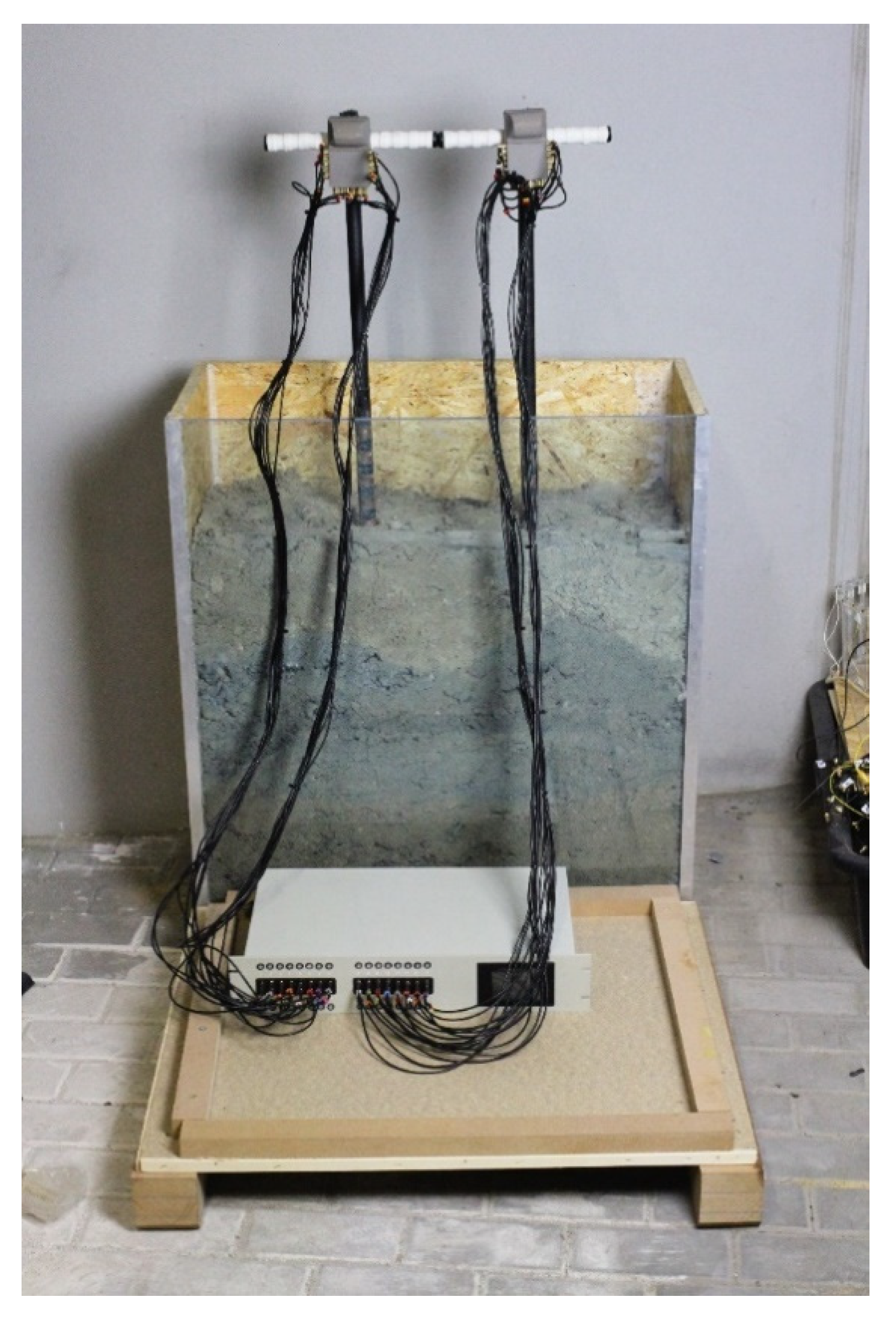
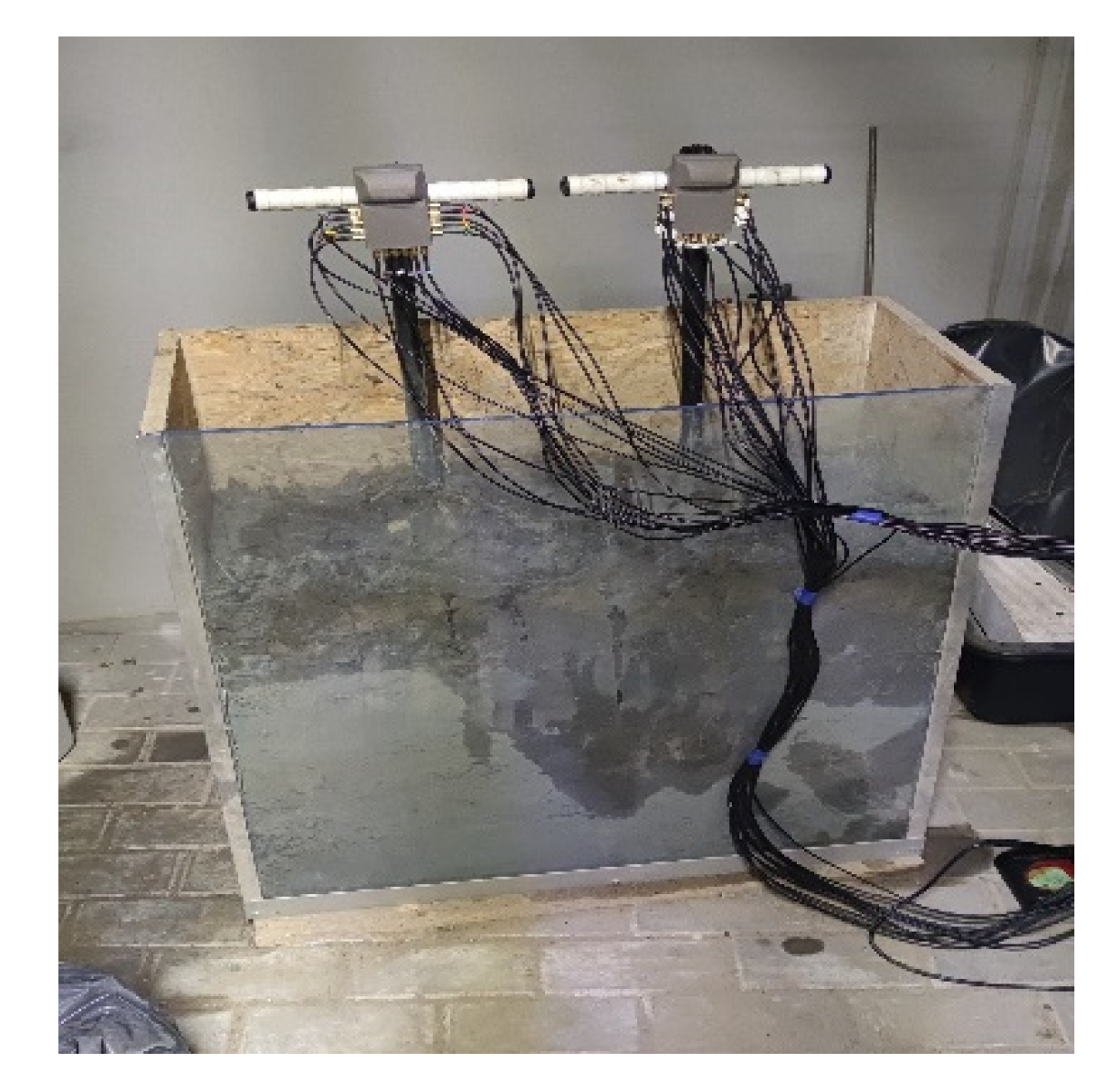
2.2. Measurement System
2.3. Algorithms and Methods
2.3.1. Logistic Regression
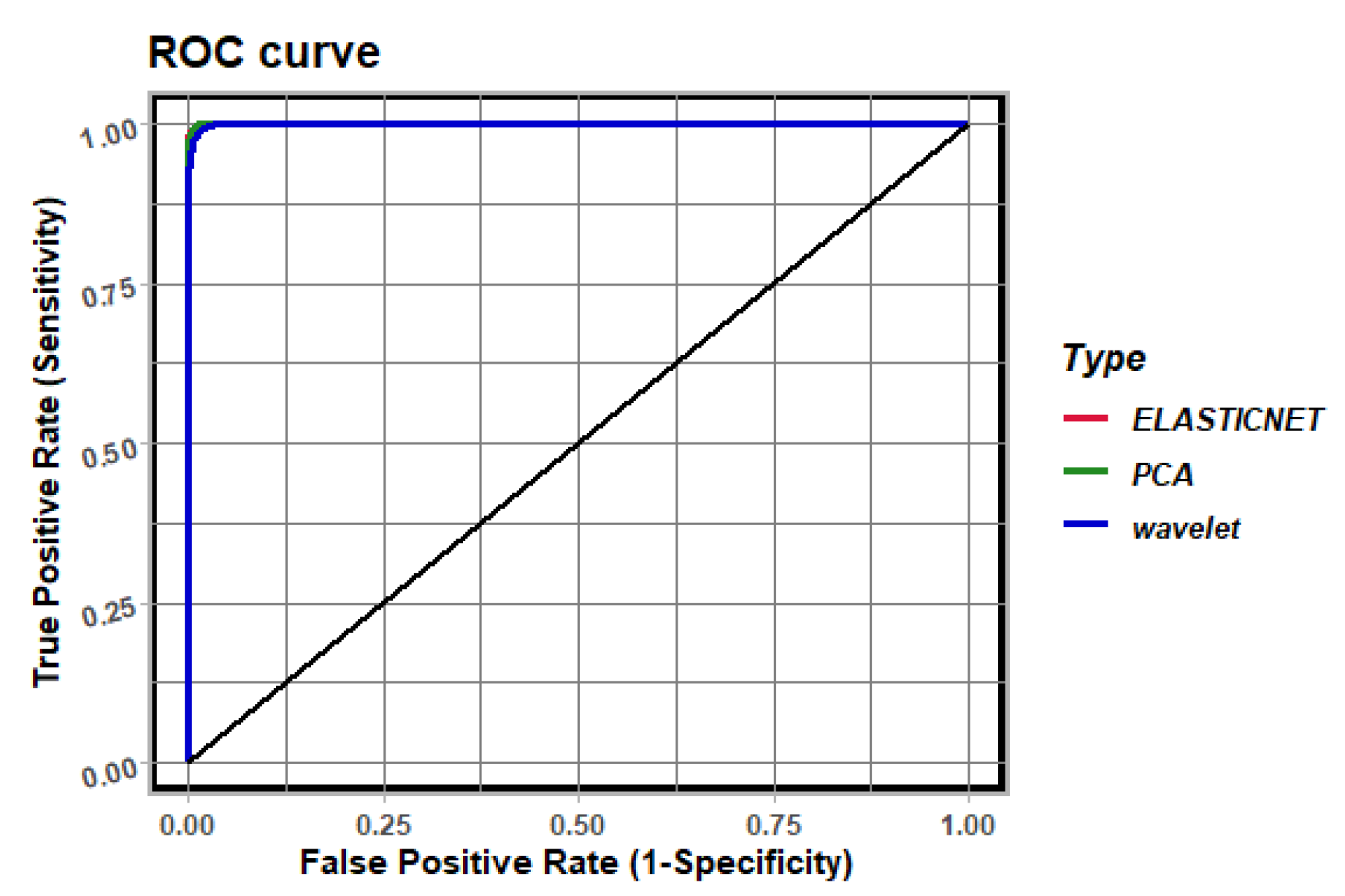
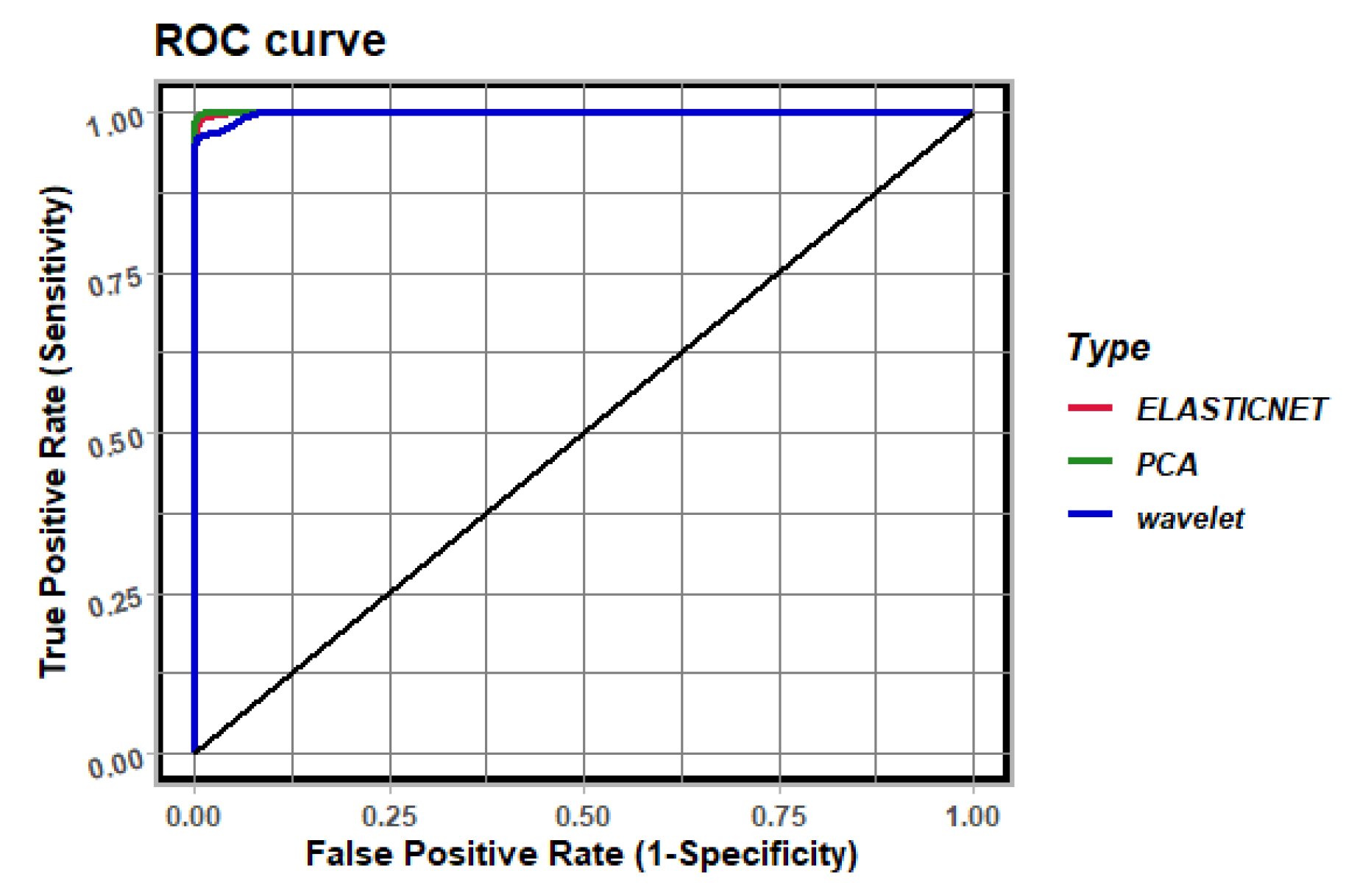
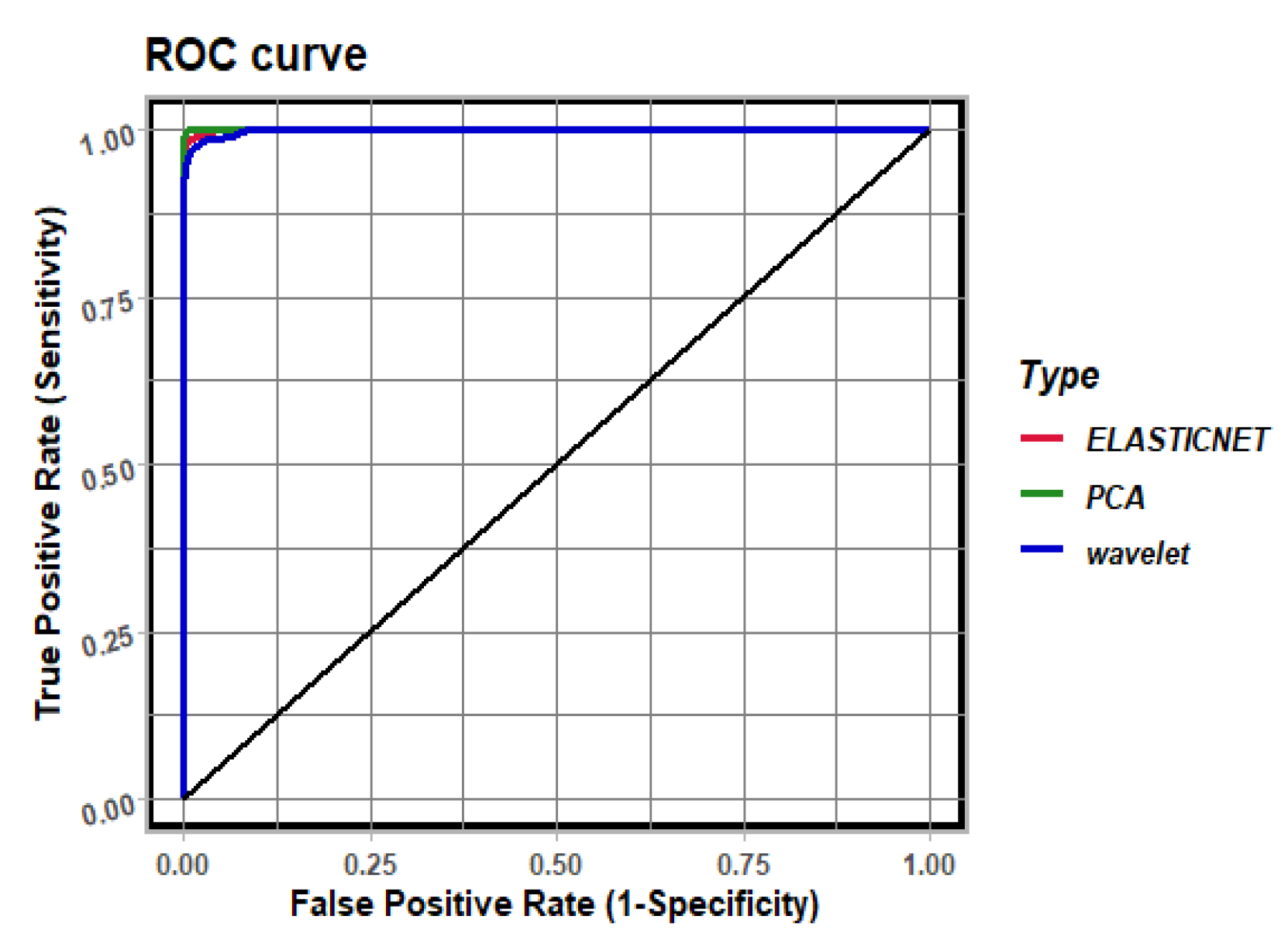
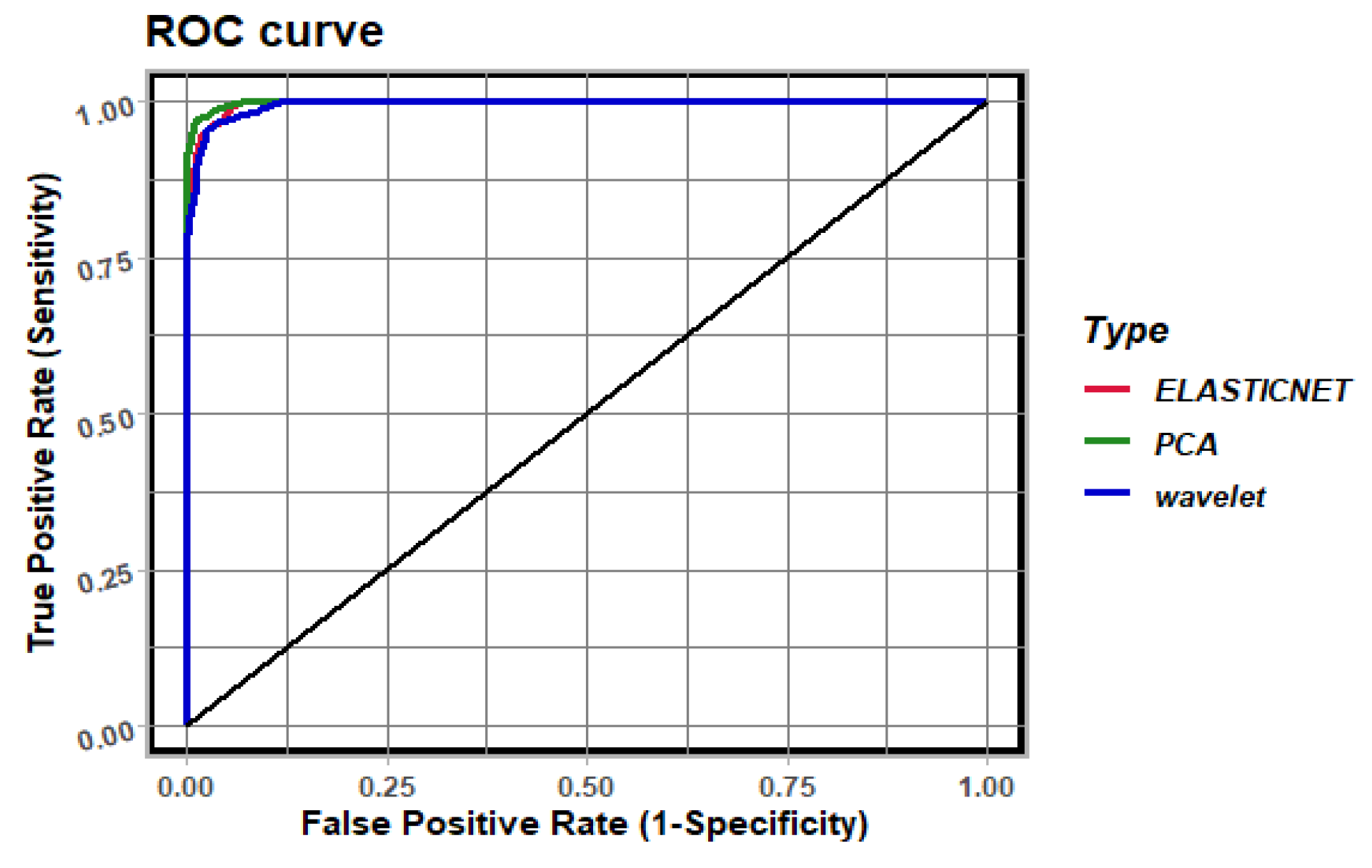
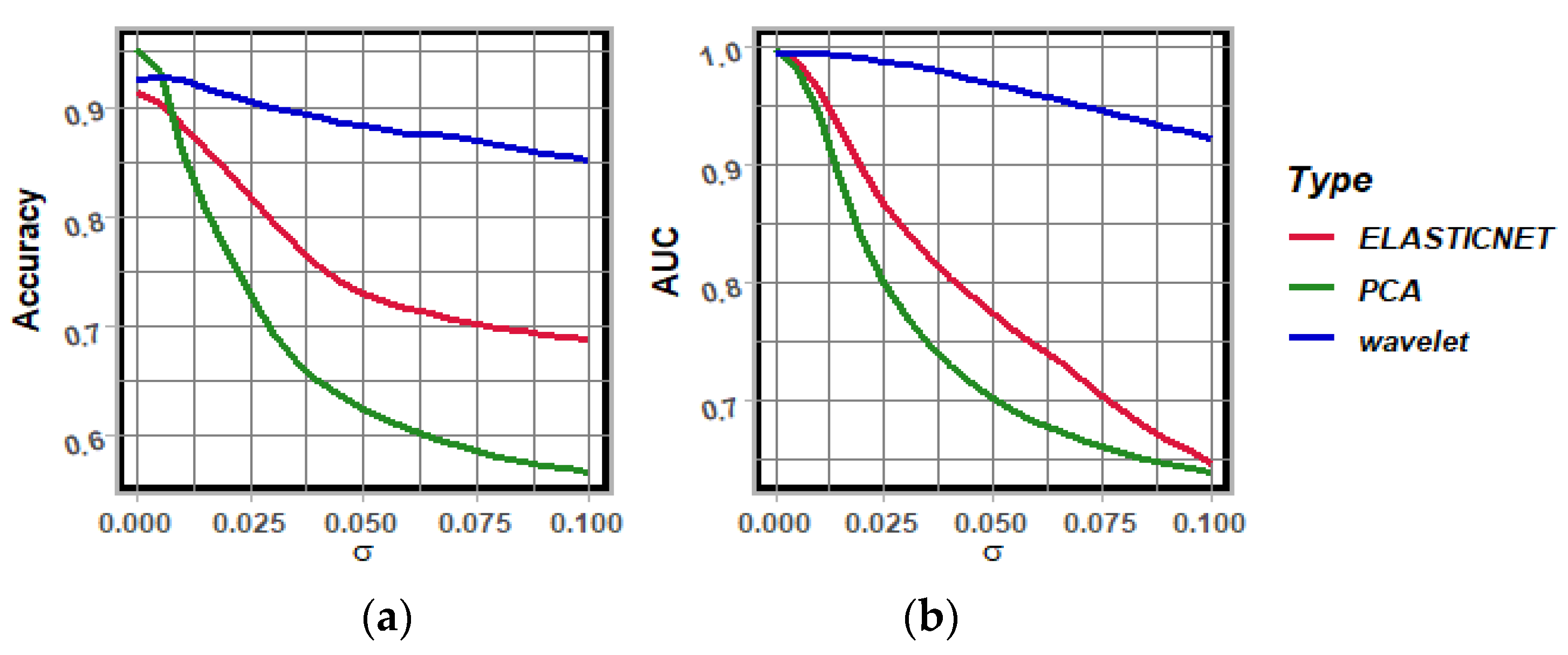
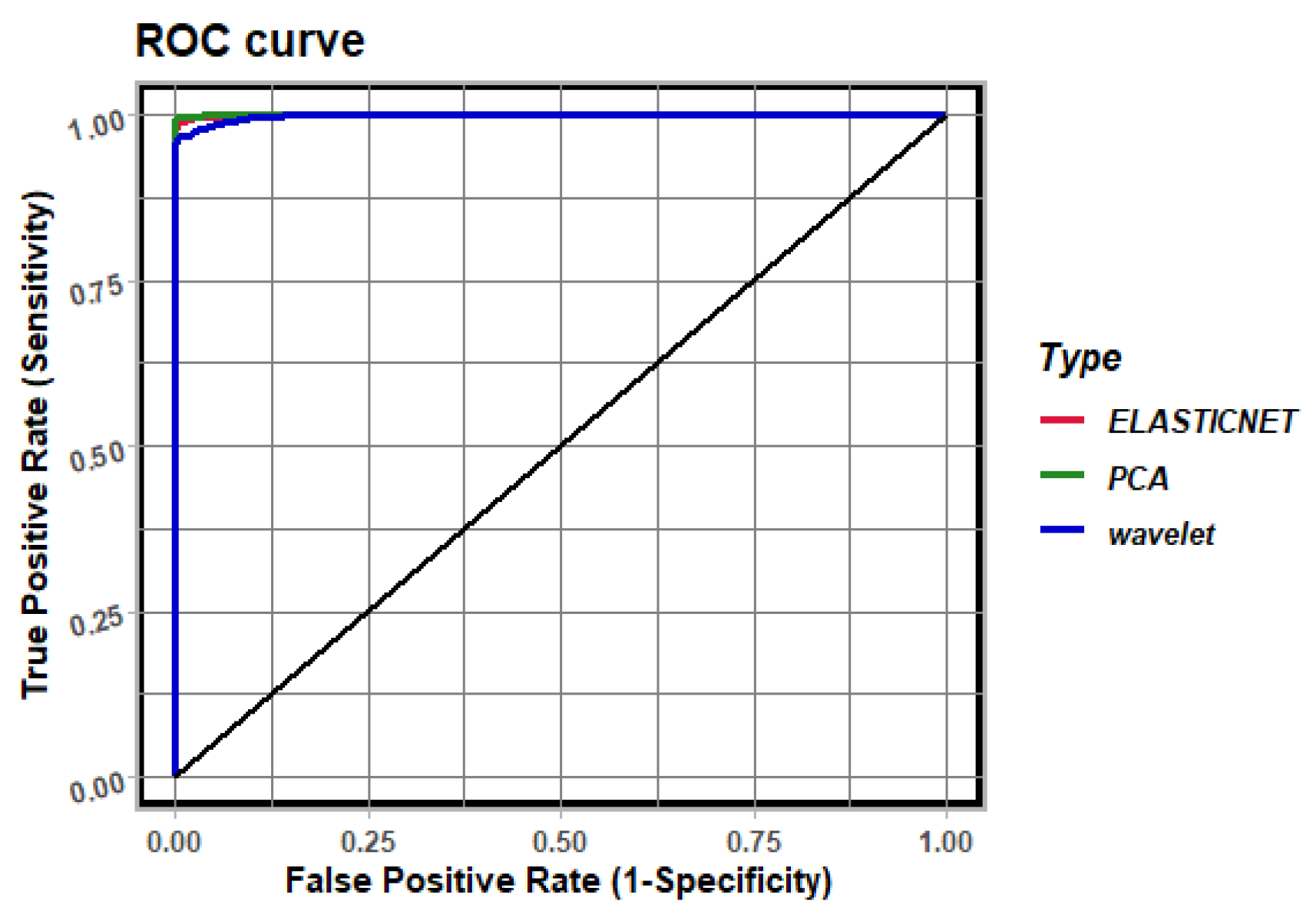
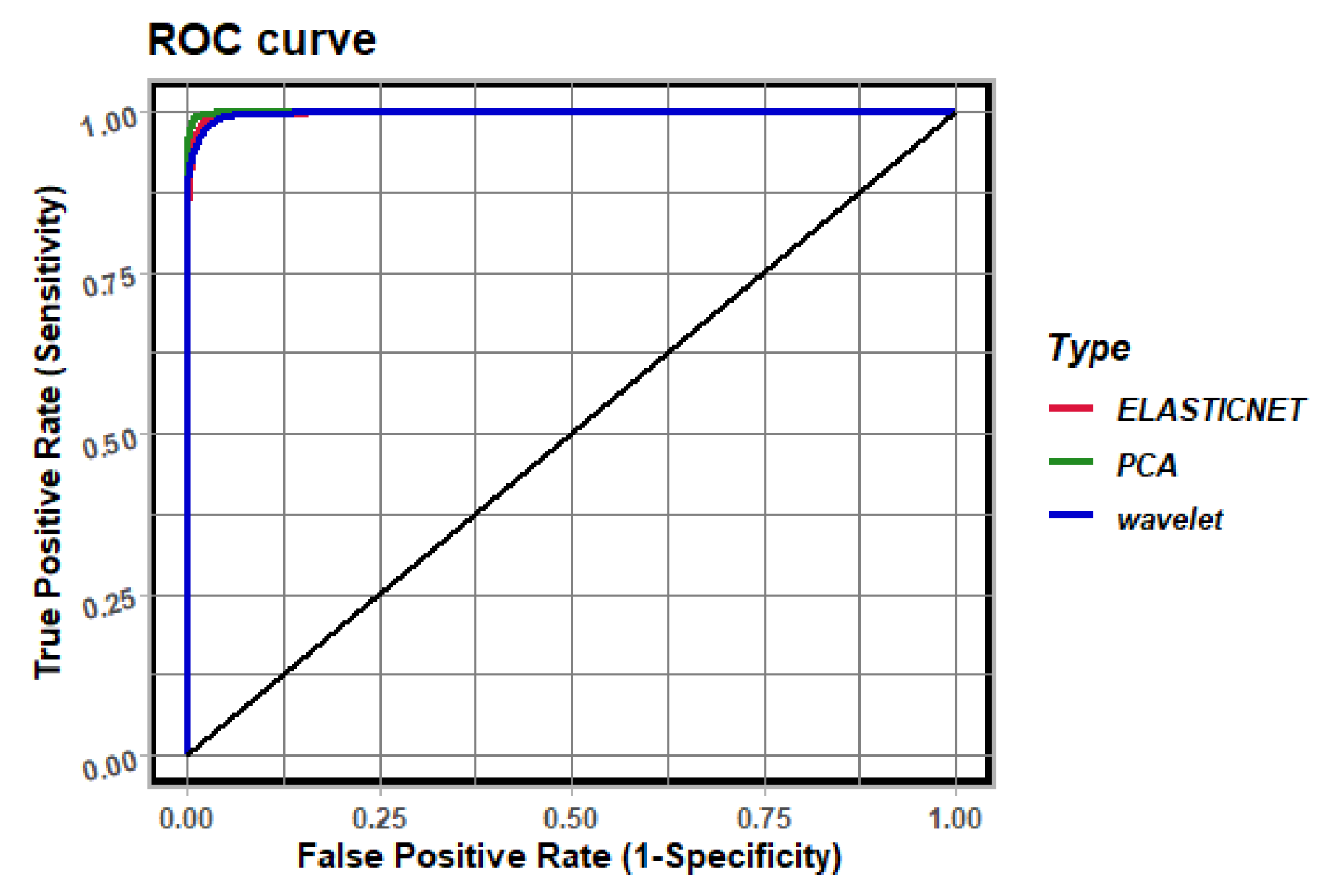
2.3.2. Receiver Operating Characteristic (ROC)
2.3.3. Elastic Net
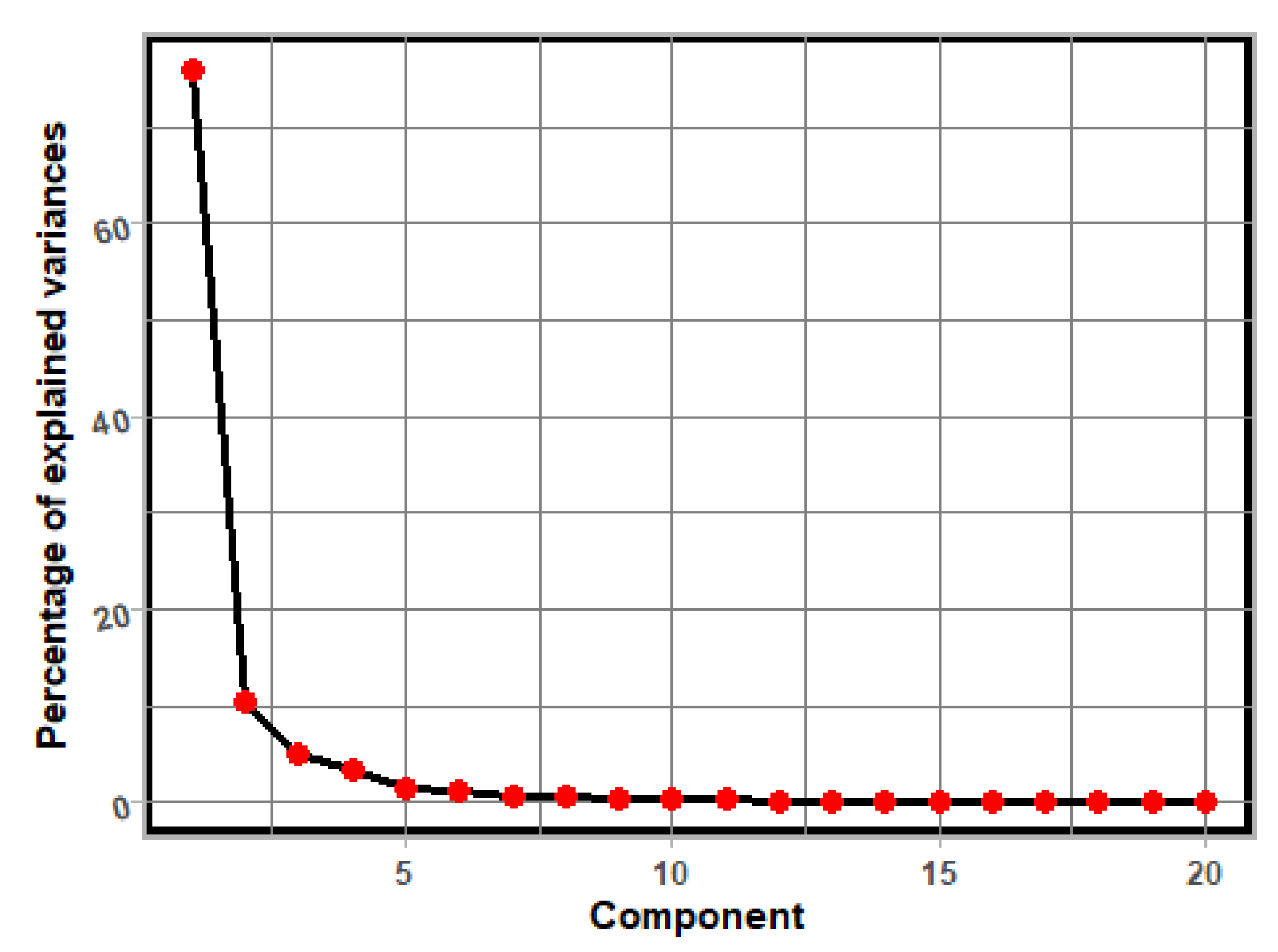
2.3.4. Principal Components Analysis
2.3.5. Discrete Wavelet Transformation (DWT)
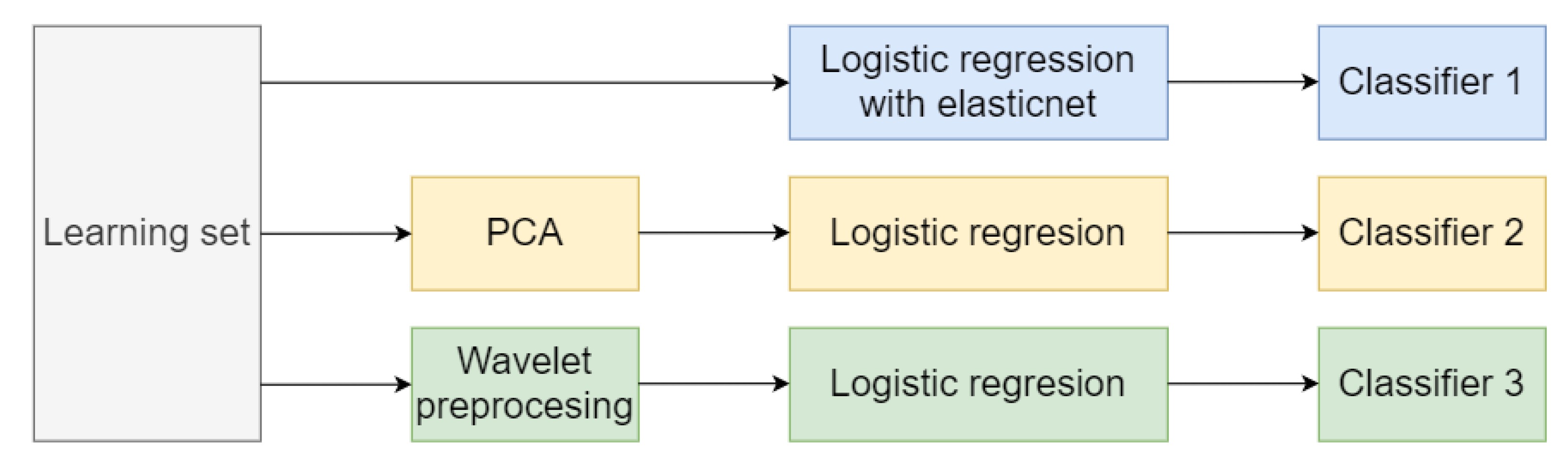
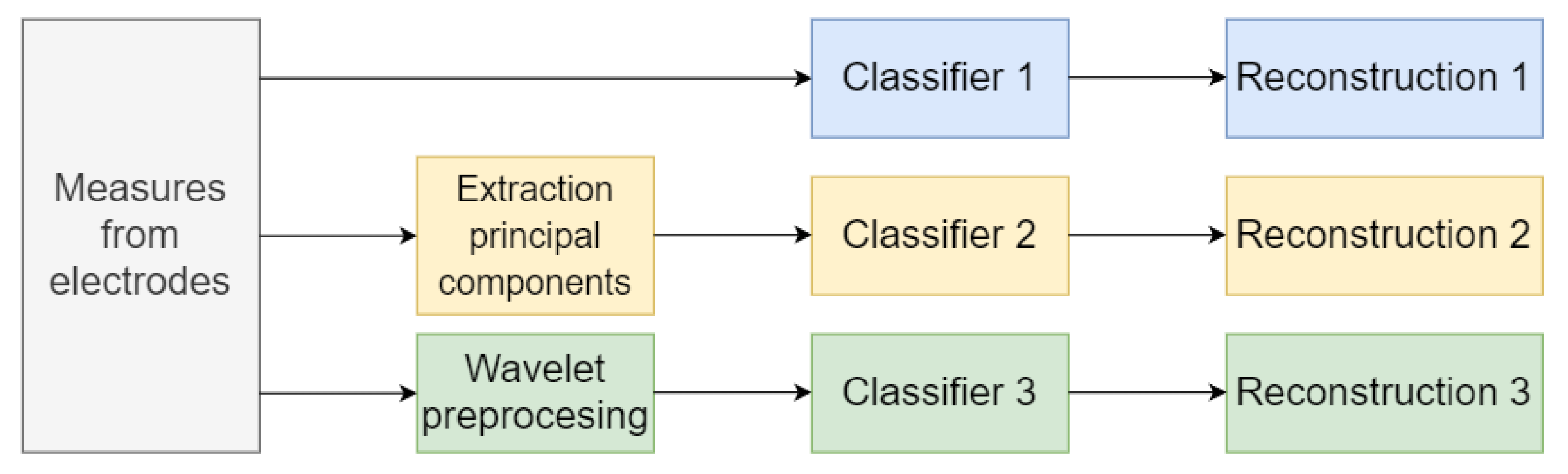
2.3.6. Algorithm Implementation
3. Results
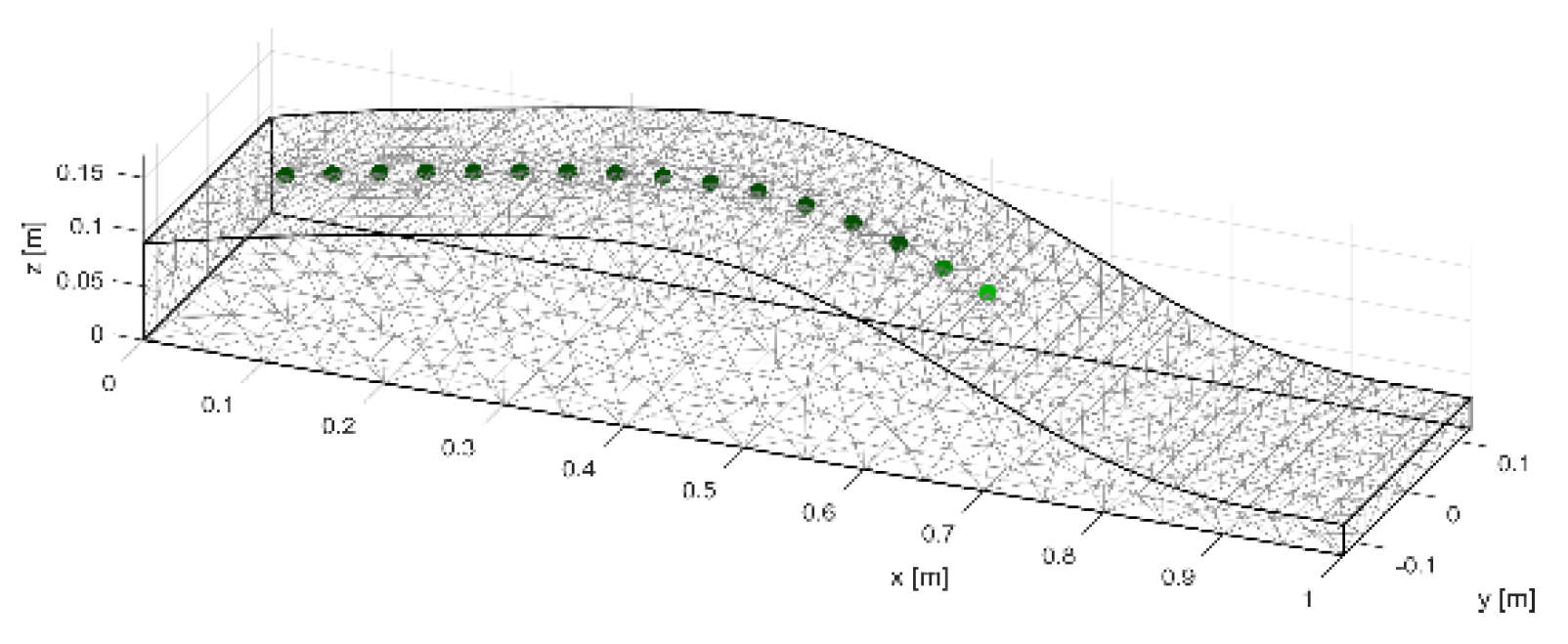
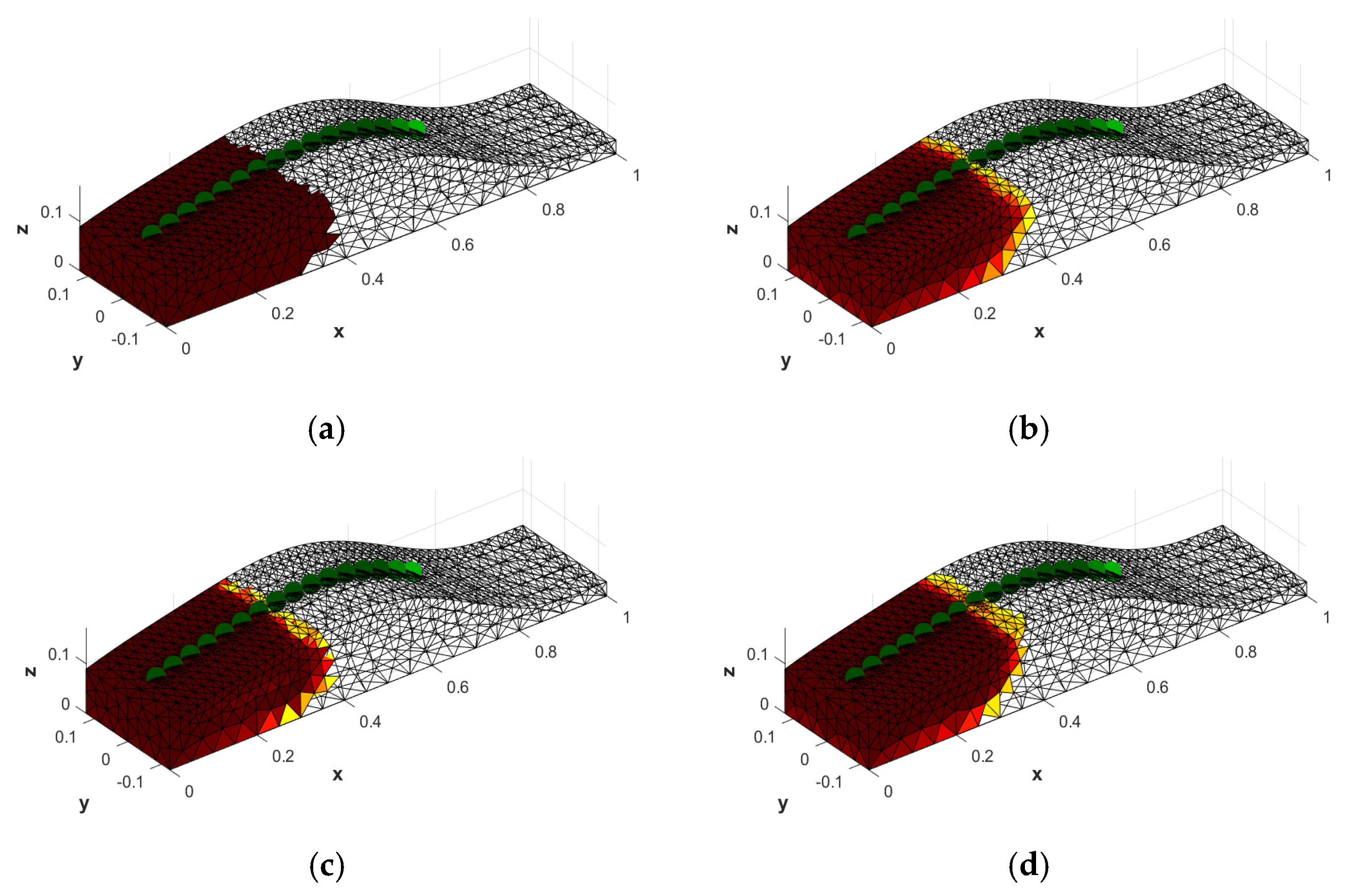
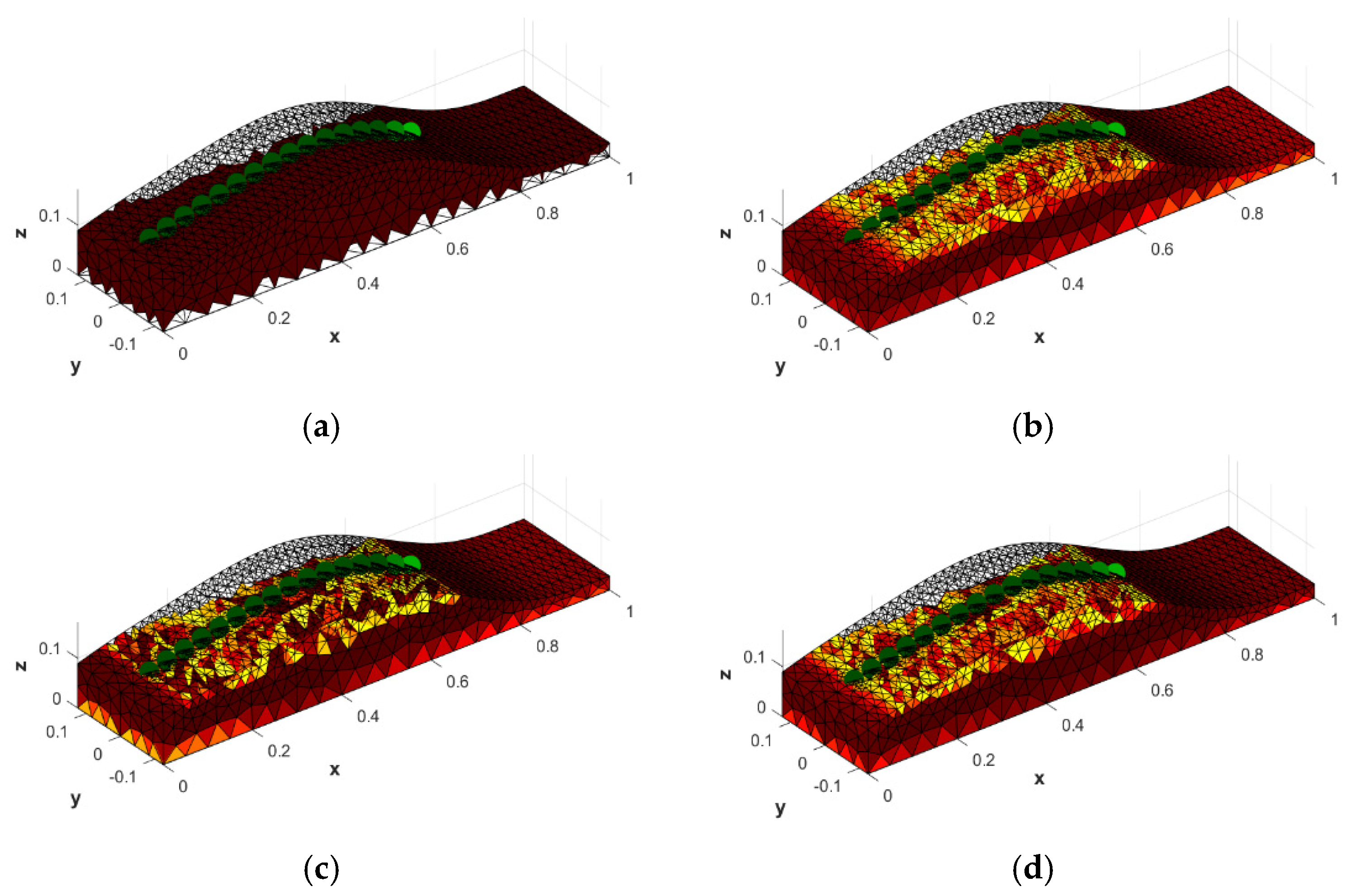
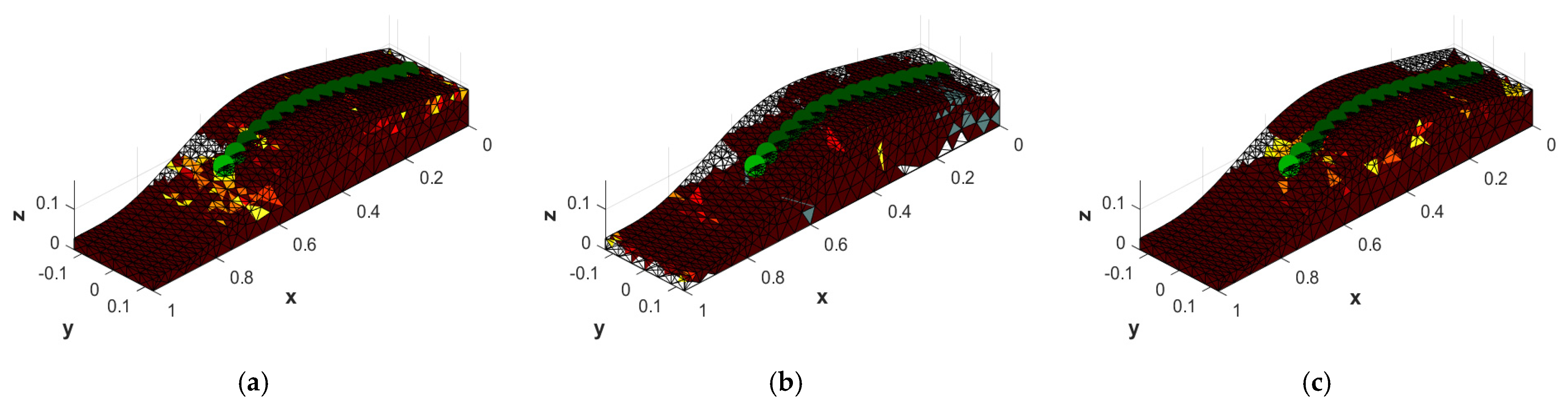
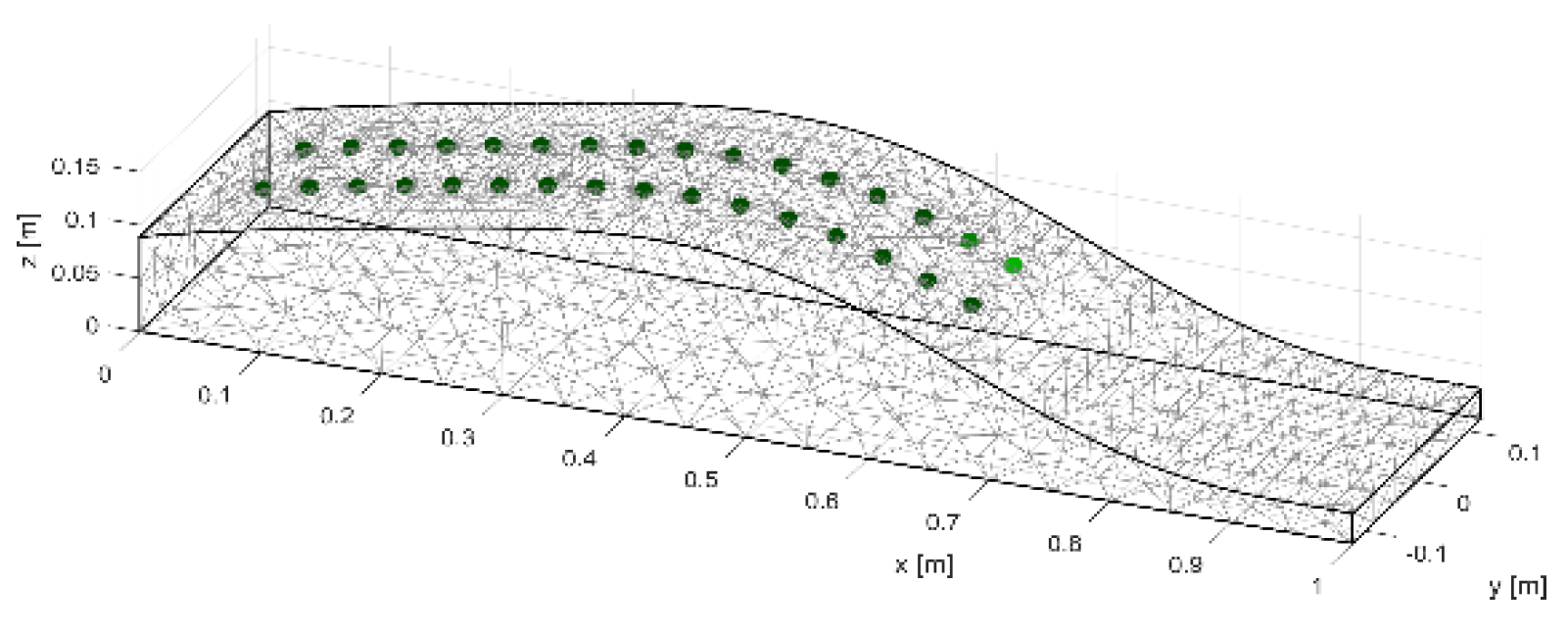
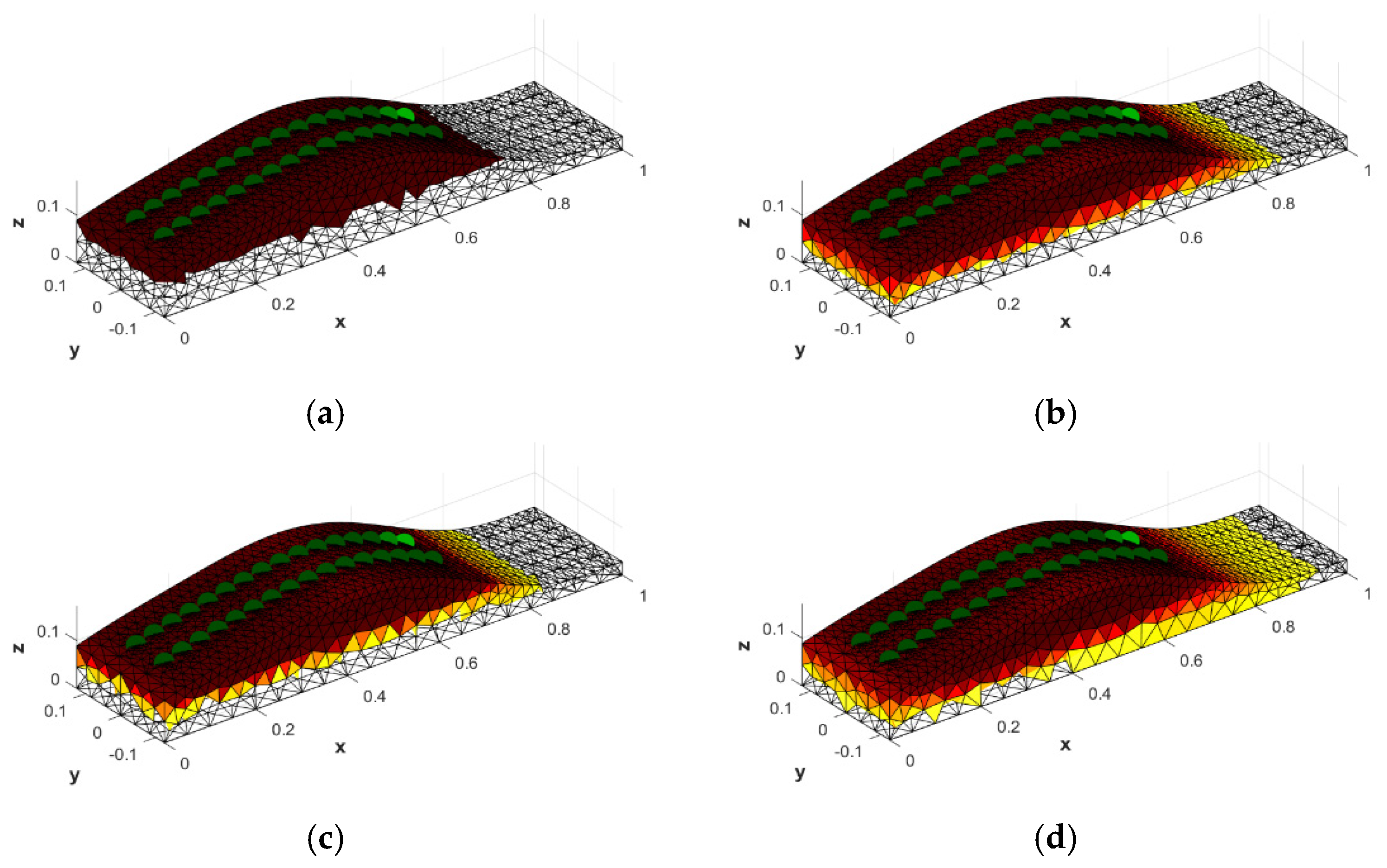
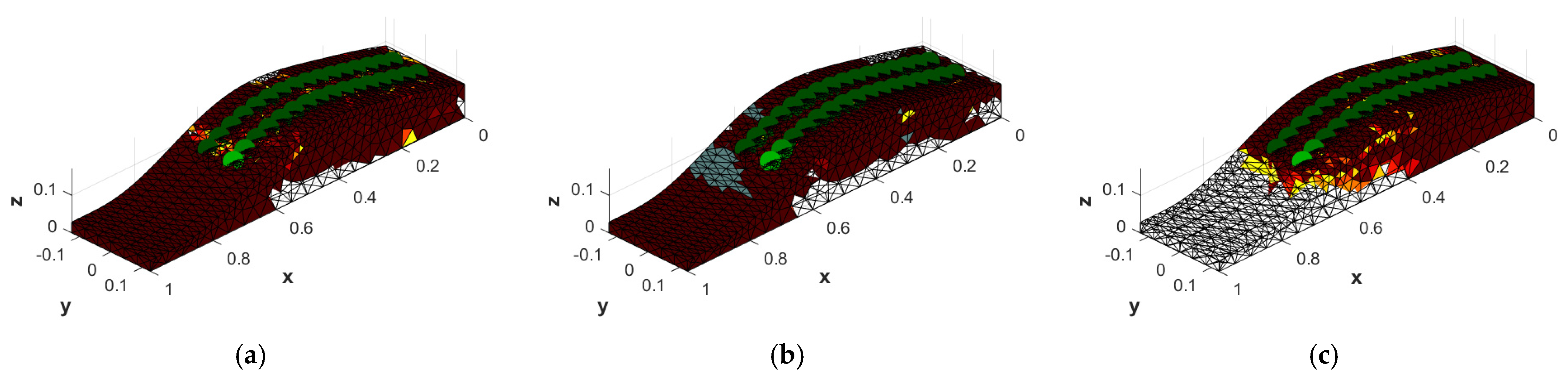
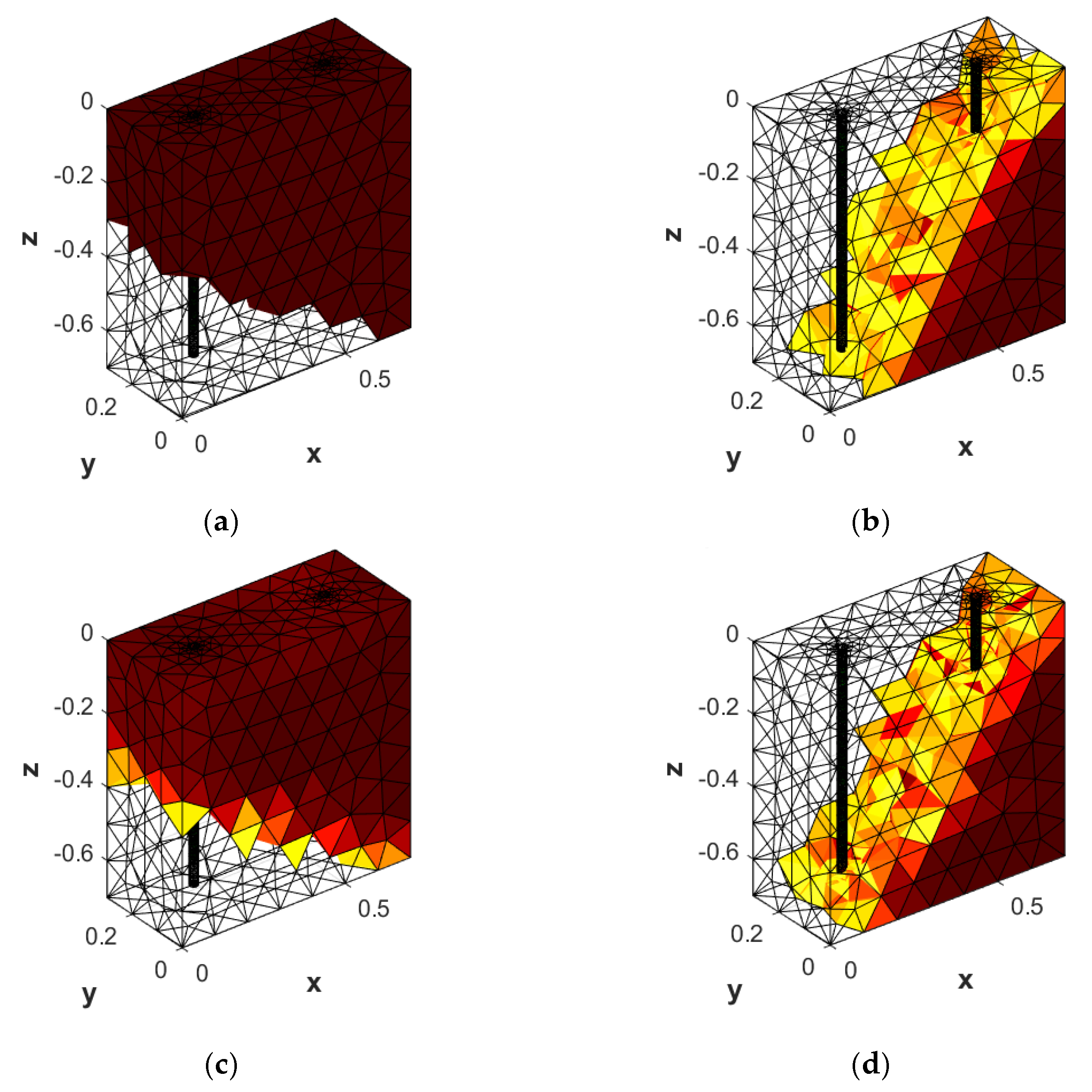
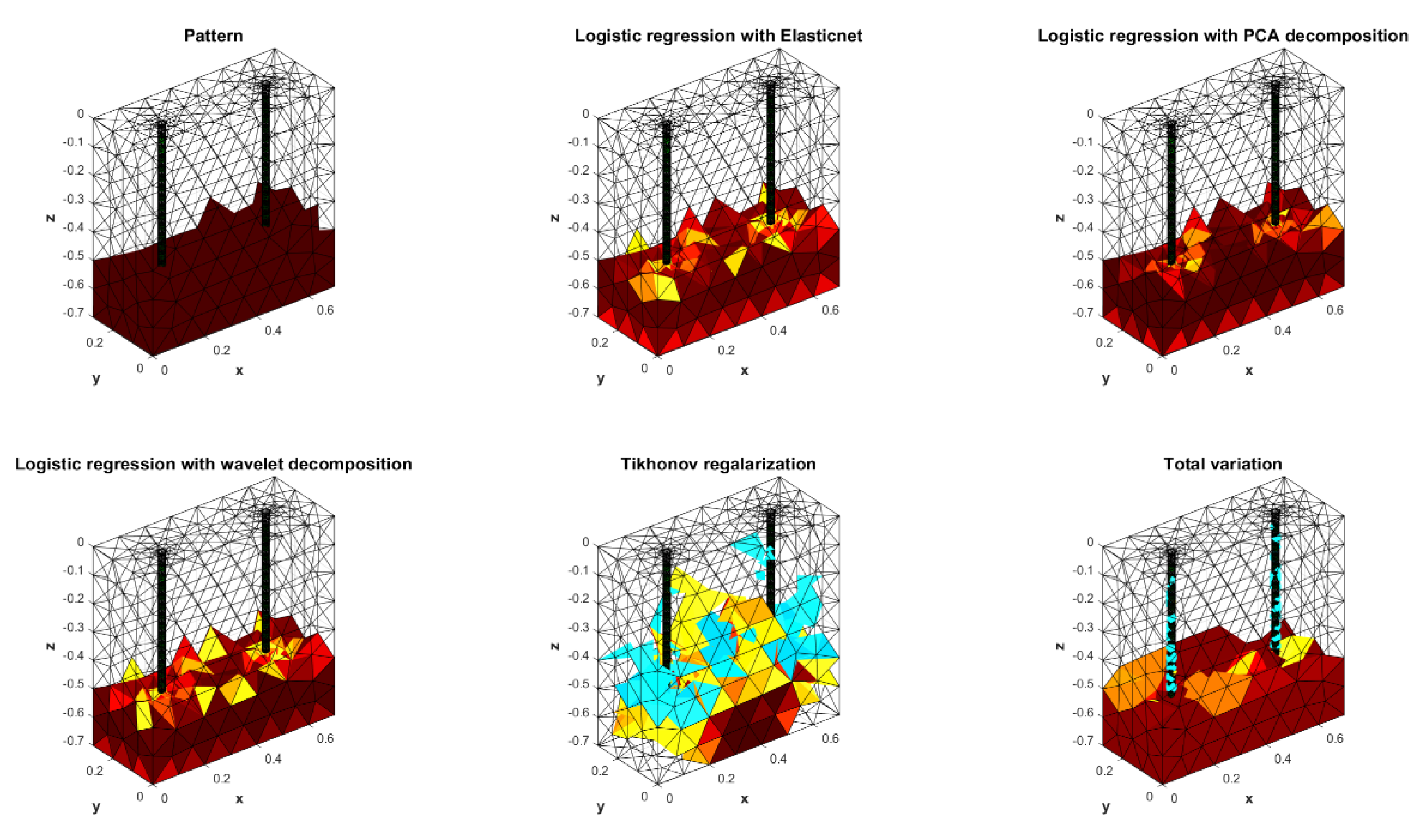
3.1. Image Reconstruction for Model I
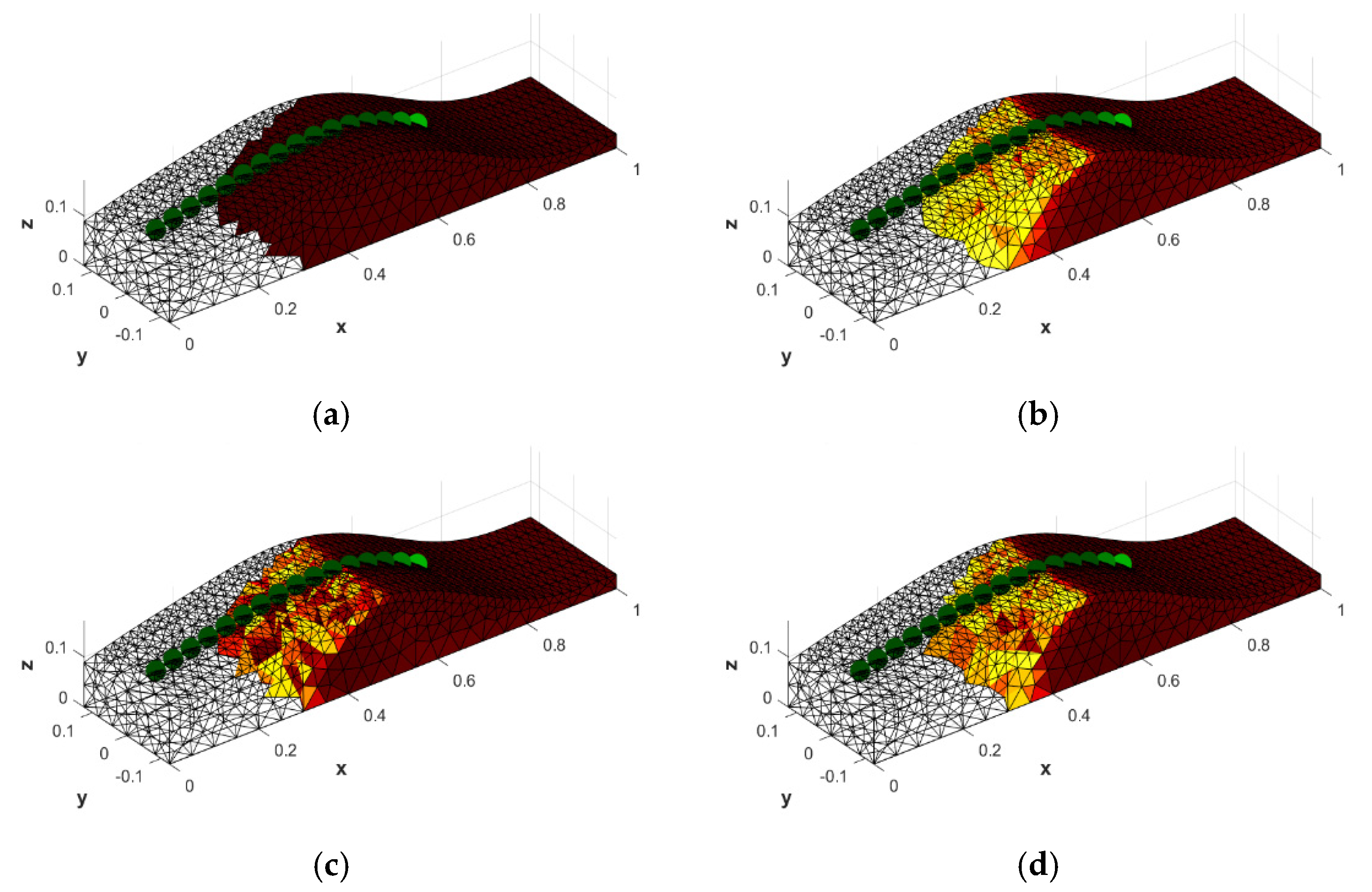
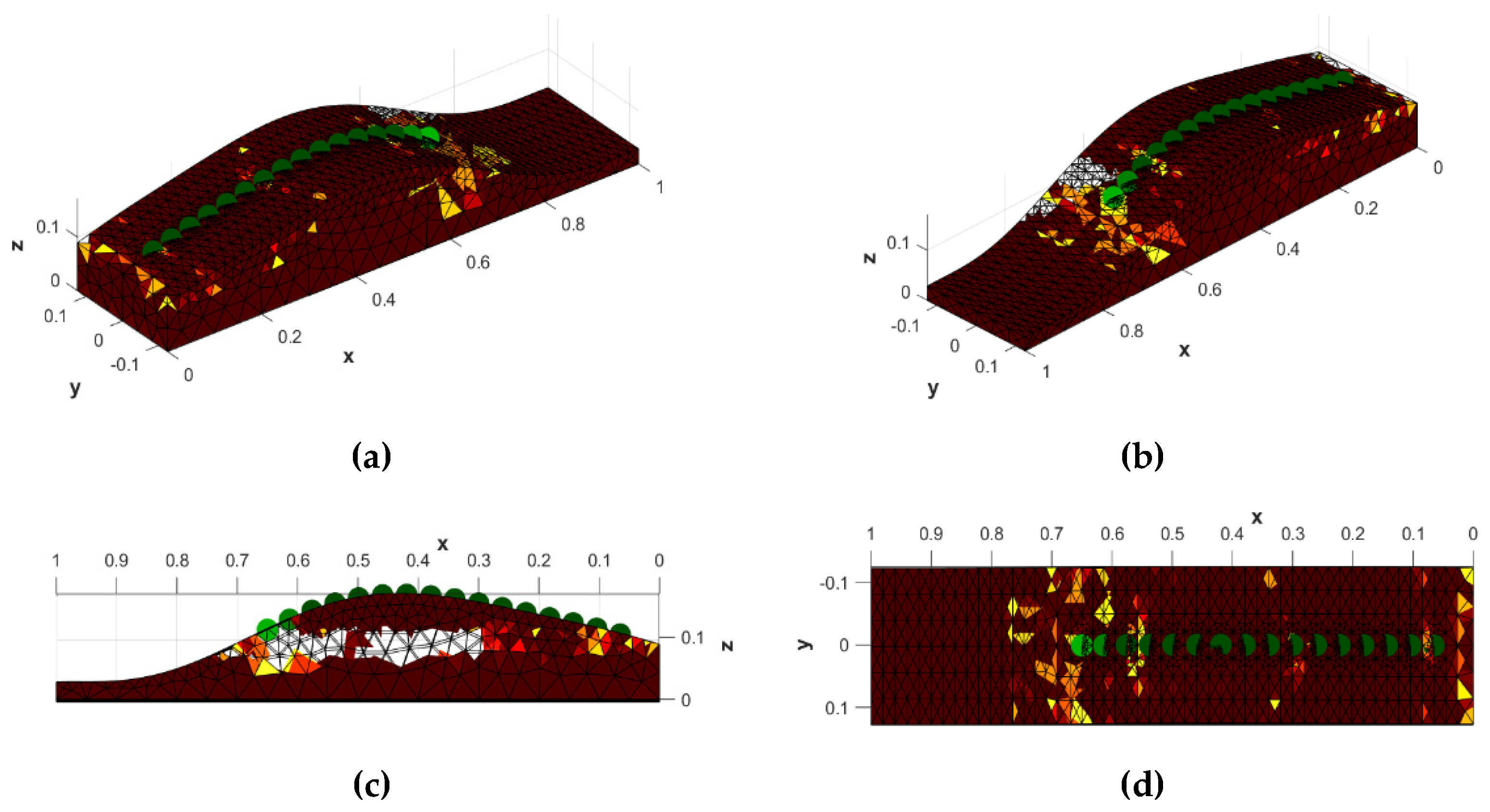
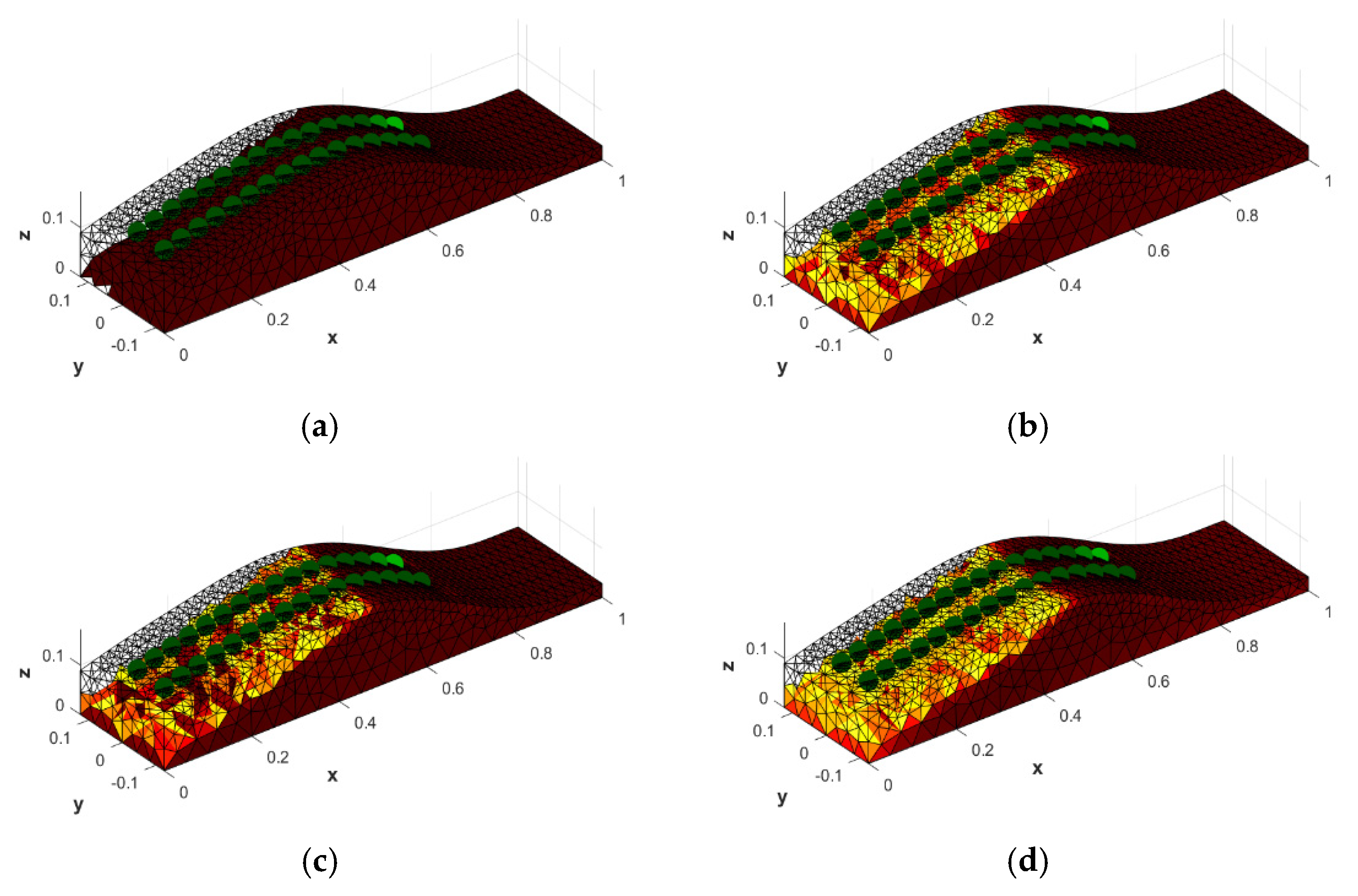
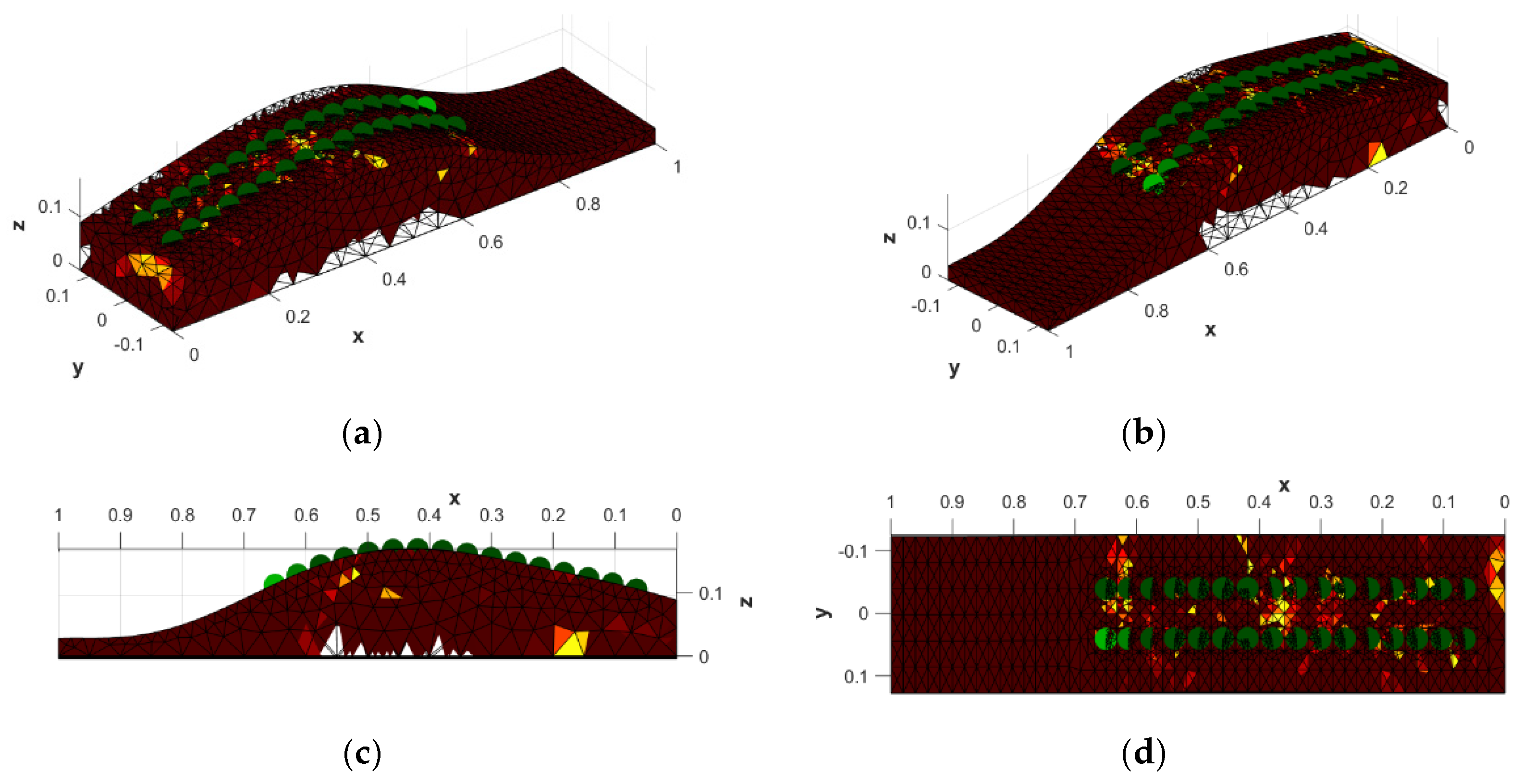
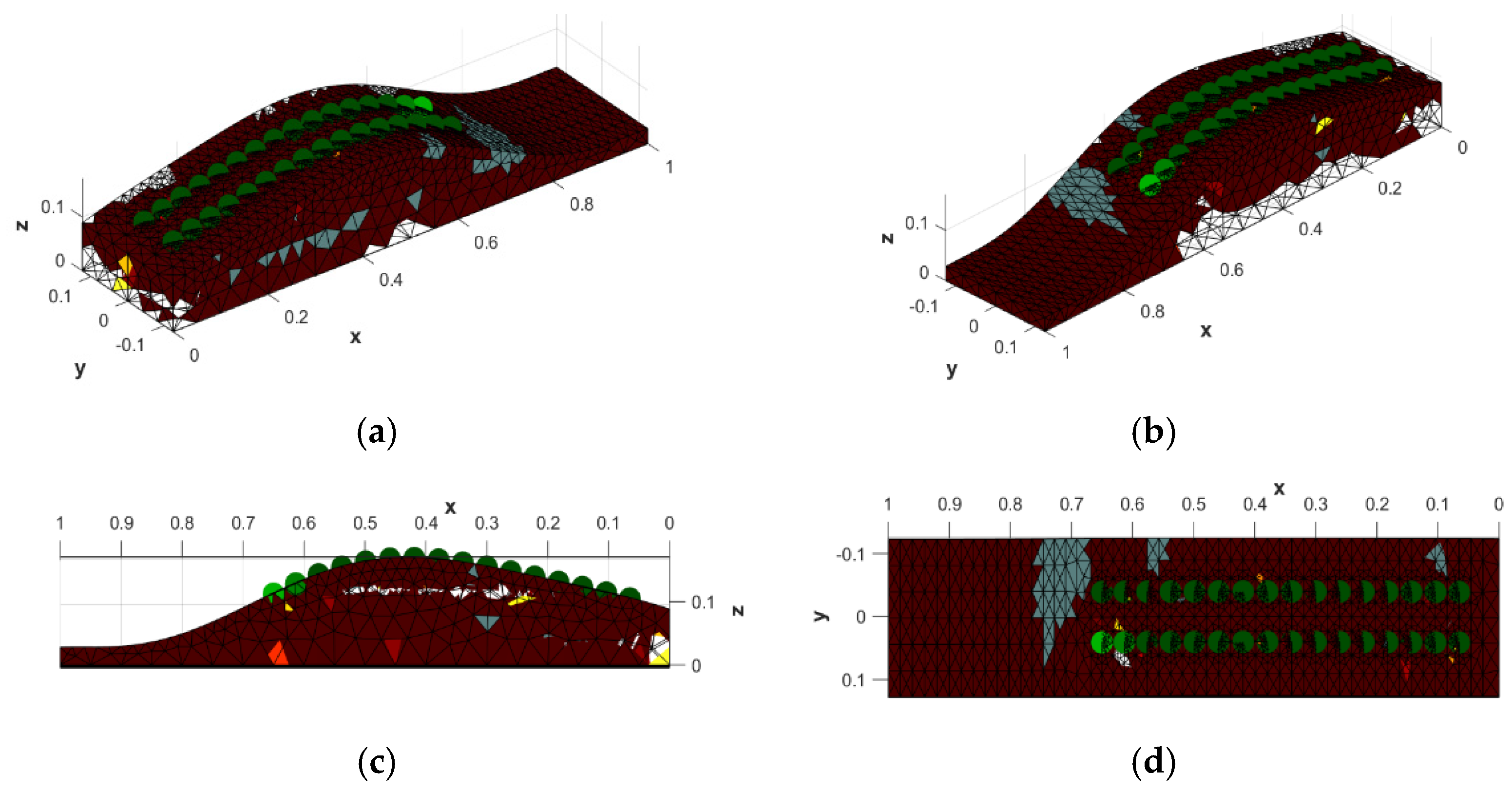
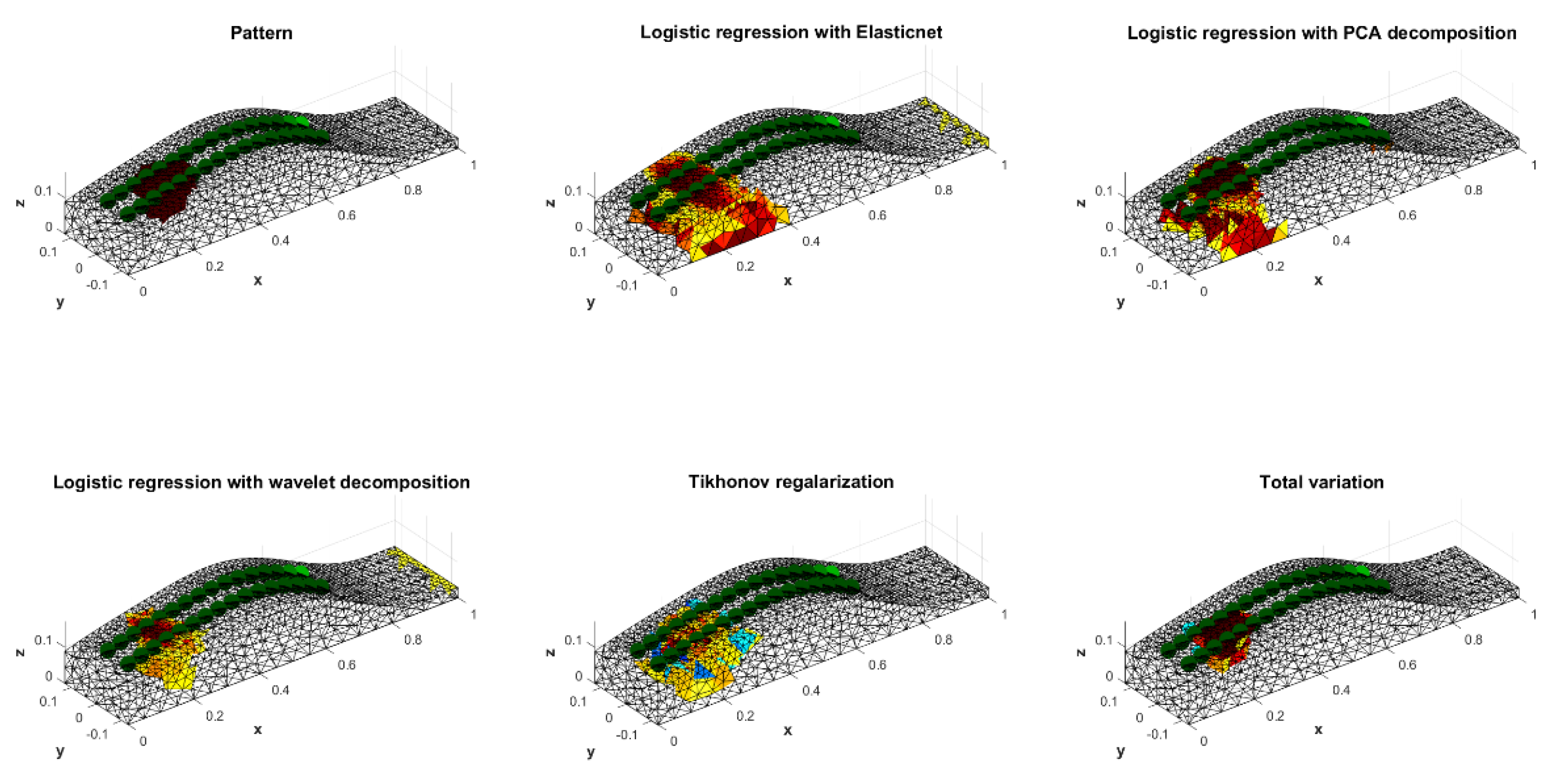
3.2. Image Reconstruction for Model II
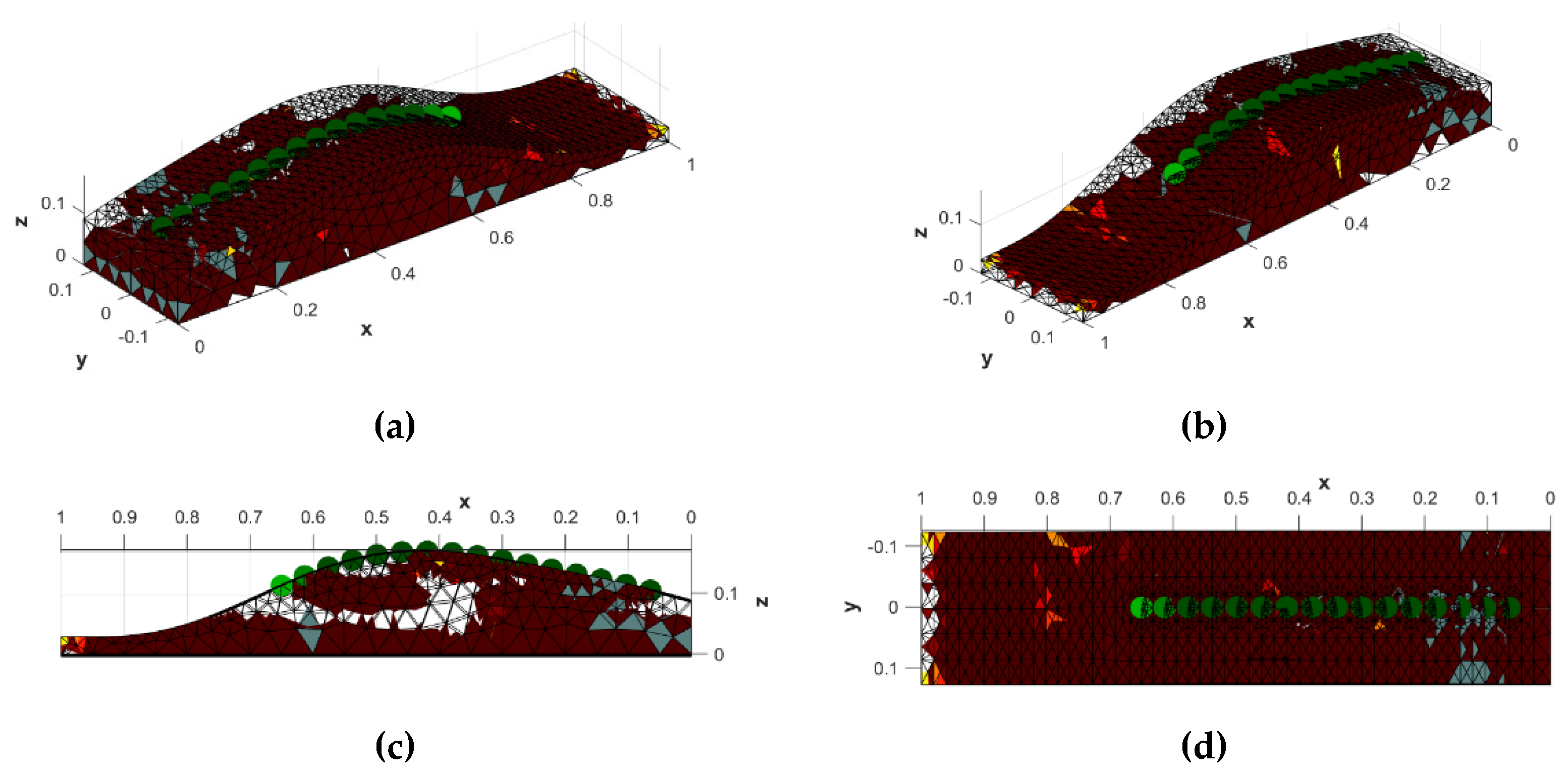
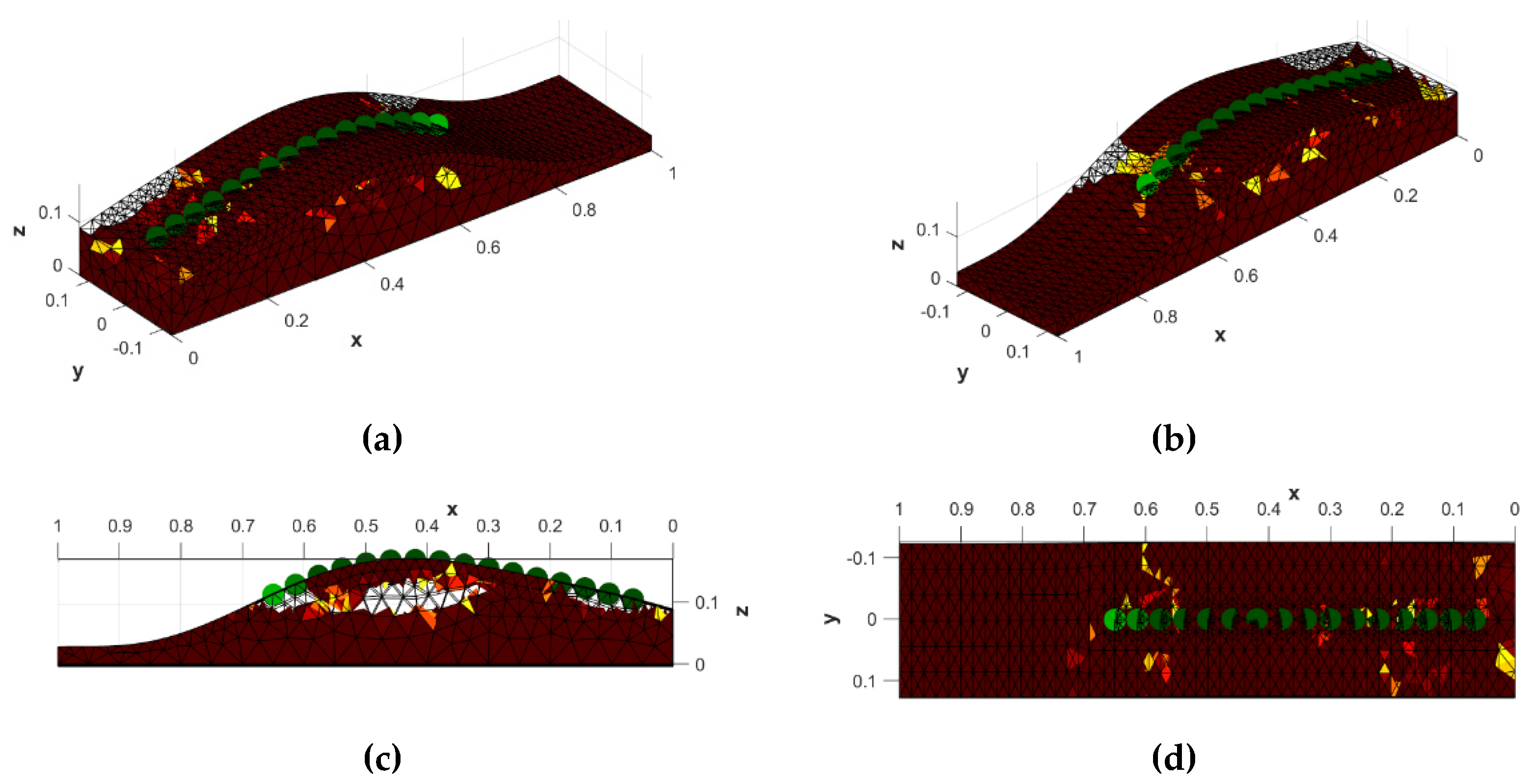
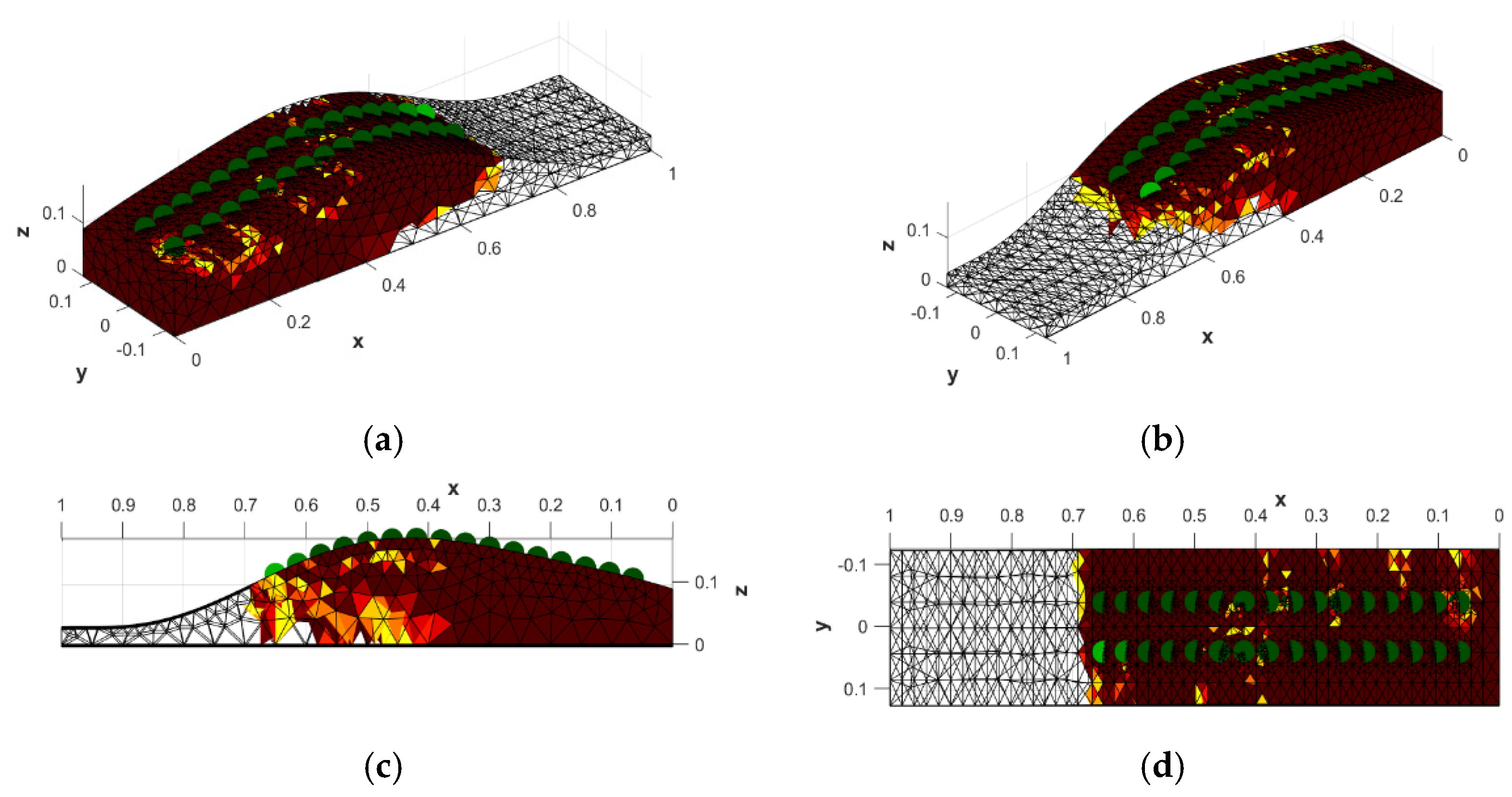
3.3. Image Reconstruction for Model III
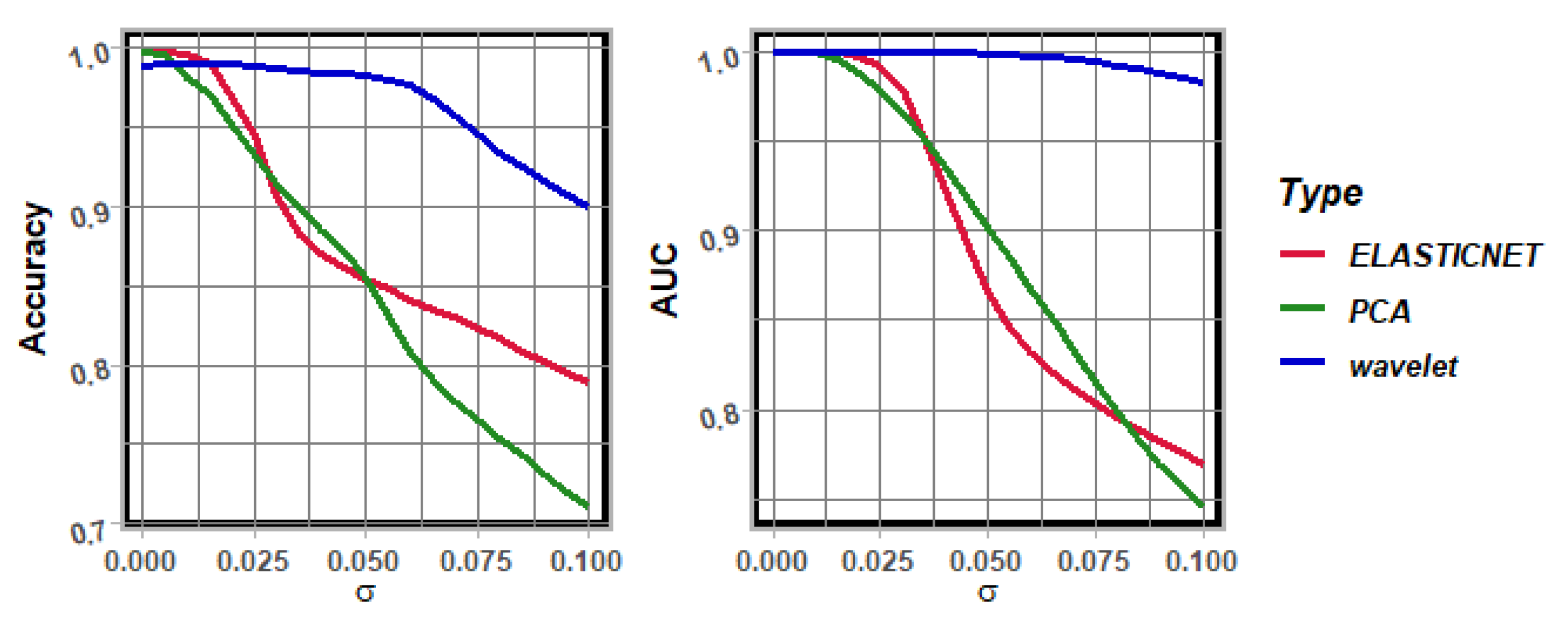
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Forson, A.; Comas, X.; Whitman, D. Integration of electrical resistivity imaging and ground penetrating radar to investigate solution features in the Biscayne Aquifer. J. Hydrol. 2014, 515, 129–138. [Google Scholar] [CrossRef]
- De Donno, G.; Di Giambattista, L.; Orlando, L. High-resolution investigation of masonry samples through GPR and electrical resistivity tomography. Constr. Build. Mater. 2017, 154, 1234–1249. [Google Scholar] [CrossRef]
- Bukowska-Belniak, B.; Borecka, A.; Leśniak, A. The continuous thermal imaging of the flood embankment to identify location of the leaks. In Proceedings of the 14th Quantitative InfraRed Thermography Conference, Berlin, Germany, 25–29 June 2018. [Google Scholar]
- Crawford, M.M.; Bryson, L.S.; Woolery, E.W.; Wang, Z. Using 2-D electrical resistivity imaging for joint geophysical and geotechnical characterization of shallow landslides. J. Appl. Geophys. 2018, 157, 37–46. [Google Scholar] [CrossRef]
- Lesparre, N.; Nguyen, F.; Kemna, A.; Robert, T.; Hermans, T.; Daoudi, M.; Flores-Orozco, A. A new approach for time-lapse data weighting in electrical resistivity tomography. Geophysics 2017, 82, E325–E333. [Google Scholar] [CrossRef]
- Hojat, A.; Ferrario, M.; Arosio, D.; Brunero, M.; Ivanov, V.; Longoni, L.; Madaschi, A.; Papini, M.; Tresoldi, G.; Zanzi, L. Laboratory Studies Using Electrical Resistivity Tomography and Fiber Optic Techniques to Detect Seepage Zones in River Embankments. Geosciences 2021, 11, 69. [Google Scholar] [CrossRef]
- Ghafoori, Y.; Vidmar, A.; Říha, J.; Kryžanowski, A. A Review of Measurement Calibration and Interpretation for Seepage Monitoring by Optical Fiber Distributed Temperature Sensors. Sensors 2020, 20, 5696. [Google Scholar] [CrossRef]
- Bossi, G.; Bersan, S.; Cola, S.; Schenato, L.; De Polo, F.; Menegazzo, C.; Boaga, J.; Cassiani, G.; Donini, F.; Simonini, P. Multidisciplinary analysis and modelling of a river embankment affected by piping. In European Working Group on Internal Erosion; Springer: Cham, Switzerland, 2018; pp. 234–244. [Google Scholar]
- Schenato, L. A Review of Distributed Fibre Optic Sensors for Geo-Hydrological Applications. Appl. Sci. 2017, 7, 896. [Google Scholar] [CrossRef]
- Bersan, S.; Koelewijn, A.R.; Simonini, P. Effectiveness of distributed temperature measurements for early detection of piping in river embankments. Hydrol. Earth Syst. Sci. Discuss. 2018, 22, 1491–1508. [Google Scholar] [CrossRef] [Green Version]
- Habel, W.R.; Krebber, K. Fiber-optic sensor applications in civil and geotechnical engineering. Photonics Sens. 2011, 1, 268–280. [Google Scholar] [CrossRef] [Green Version]
- Ghafoori, Y.; Maček, M.; Vidmar, A.; Říha, J.; Kryžanowski, A. Analysis of Seepage in a Laboratory Scaled Model Using Passive Optical Fiber Distributed Temperature Sensor. Water 2020, 12, 367. [Google Scholar] [CrossRef] [Green Version]
- Rymarczyk, T. Using electrical impedance tomography to monitoring flood banks. Int. J. Appl. Electromagn. Mech. 2014, 45, 489–494. [Google Scholar] [CrossRef]
- Jones, G.; Sentenac, P.; Zielinski, M. Desiccation cracking detection using 2-D and 3-D Electrical Resistivity Tomography: Validation on a flood embankment. J. Appl. Geophys. 2014, 106, 196–211. [Google Scholar] [CrossRef] [Green Version]
- Michta, E.; Szulim, R.; Sojka-Piotrowska, A.; Piotrowski, K. IoT-based flood embankments monitoring system. In Photonics Applications in Astronomy, Communications, Industry, and High Energy Physics Experiments 2017; SPIE: Bellingham, WA, USA, 2017; Volume 10445, p. 104455Y. [Google Scholar] [CrossRef]
- Sekuła, K.; Połeć, M.; Borecka, A. Innovative solutions in monitoring systems in flood protection. E3S Web Conf. Water Wastewater Energy Smart Cities 2018, 30, 01005. [Google Scholar] [CrossRef] [Green Version]
- Rymarczyk, T.; Kozłowski, E.; Kłosowski, G. Electrical impedance tomography in 3D flood embankments testing—Elastic net approach. Trans. Inst. Meas. Control 2020, 42, 680–690. [Google Scholar] [CrossRef]
- Rymarczyk, T.; Kłosowski, G. Application of neural reconstruction of tomographic images in the problem of reliability of flood protection facilities. Eksploat. Niezawodn.-Maint. Reliab. 2018, 20, 425–434. [Google Scholar] [CrossRef]
- Daniewski, K.; Kosicka, E.; Mazurkiewicz, D. Analysis of the correctness of determination of the effectiveness of maintenance service actions. Manag. Prod. Eng. Rev. 2018, 9, 20–25. [Google Scholar]
- Korzeniewska, E.; Sekulska-Nalewajko, J.; Gocawski, J.; Droż, T.; Kiebasa, P. Analysis of changes in fruit tissue after the pulsed electric field treatment using optical coherence tomography. EPJ Appl. Phys. 2020, 91, 30902. [Google Scholar] [CrossRef]
- Dusek, J.; Mikulka, J. Measurement-Based Domain Parameter Optimization in Electrical Impedance Tomography Imaging. Sensors 2021, 21, 2507. [Google Scholar] [CrossRef]
- Mosorov, V.; Rybak, G.; Sankowski, D. Plug Regime Flow Velocity Measurement Problem Based on Correlability Notion and Twin Plane Electrical Capacitance Tomography: Use Case. Sensors 2021, 21, 2189. [Google Scholar] [CrossRef]
- Szczesny, A.; Korzeniewska, E. Selection of the method for the earthing resistance measurement. Przegląd Elektrotech. 2018, 94, 178–181. [Google Scholar]
- Liu, S.; Huang, Y.; Wu, H.; Tan, C.; Jia, J. Efficient Multitask Structure-Aware Sparse Bayesian Learning for Frequency-Difference Electrical Impedance Tomography. IEEE Trans. Ind. Inform. 2021, 17, 463–472. [Google Scholar] [CrossRef] [Green Version]
- Wajman, R.; Banasiak, R.; Babout, L. On the Use of a Rotatable ECT Sensor to Investigate Dense Phase Flow: A Feasibility Study. Sensors 2020, 20, 4854. [Google Scholar] [CrossRef] [PubMed]
- Zou, H.; Hastie, T. Regularization and variable selection via the elastic net. J. R. Stat. Soc. Ser. B 2005, 67, 301–320. [Google Scholar] [CrossRef] [Green Version]
- Mevik, B.-H.; Wehrens, R. The pls Package: Principal Component and Partial Least Squares Regression in R. J. Stat. Softw. 2007, 18, 1–23. [Google Scholar] [CrossRef] [Green Version]
- Daubechies, I. Orthonormal Bases of Compactly Supported Wavelets. Commun. Pure Appl. Math. 1992, 41, 909–996. [Google Scholar] [CrossRef] [Green Version]
- Holder, D.S. Introduction to Biomedical Electrical Impedance Tomography Electrical Impedance Tomography Methods; History and Applications Bristol, Institute of Physics: Bristol, UK, 2005. [Google Scholar]
- Rymarczyk, T. New methods to determine moisture areas by electrical impedance tomography. Int. J. Appl. Electromagn. Mech. 2016, 52, 79–87. [Google Scholar] [CrossRef]
- Adler, A.; Lionheart, W. Uses and abuses of EIDORS: An extensible software base for EIT. Physiol. Meas. 2006, 27, S25–S42. [Google Scholar] [CrossRef] [Green Version]
- Dušek, J.; Hladký, D.; Mikulka, J. Electrical Impedance Tomography Methods and Algorithms Processed with a GPU. In Proceedings of the 2017 Progress in Electromagnetics Research Symposium—Spring (PIERS), St. Petersburg, Russia, 22–25 May 2017; pp. 1710–1714. [Google Scholar]
- Kozłowski, E.; Mazurkiewicz, D.; Żabiński, T.; Prucnal, S.; Sęp, J. Assessment model of cutting tool condition for real-time supervision system. Eksploat. Niezawodn.-Maint. Reliab. 2019, 21, 679–685. [Google Scholar] [CrossRef]
- Rymarczyk, T.; Kłosowski, G.; Hoła, A.; Sikora, J.; Wołowiec, T.; Tchórzewski, P.; Skowron, S. Comparison of Machine Learning Methods in Electrical Tomography for Detecting Moisture in Building Walls. Energies 2021, 14, 2777. [Google Scholar] [CrossRef]
- Rymarczyk, T.; Nita, P.; Vejar, A.; Woś, M.; Stefaniak, B.; Adamkiewicz, P. Wearable mobile measuring device based on electrical tomography. Przegląd Elektrotech. 2019, 95, 211–214. [Google Scholar]
- Chen, B.; Abascal, J.F.P.J.; Soleimani, M. Extended Joint Sparsity Reconstruction for Spatial and Temporal ERT Imaging. Sensors 2018, 18, 4014. [Google Scholar] [CrossRef] [Green Version]
- Rymarczyk, T.; Kłosowski, G.; Tchórzewski, P.; Cieplak, T.; Kozłowski, E. Area monitoring using the ERT method with multisensor electrodes. Przegląd Elektrotech. 2019, 95, 153–156. [Google Scholar] [CrossRef] [Green Version]
- Rybak, G.; Strzecha, K. Short-Time Fourier Transform Based on Metaprogramming and the Stockham Optimization Method. Sensors 2021, 21, 4123. [Google Scholar] [CrossRef] [PubMed]
- Voss, A.; Pour-Ghaz, M.; Vauhkonen, M.; Seppänen, A. Retrieval of the saturated hydraulic conductivity of cement-based materials using electrical capacitance tomography. Cem. Concr. Compos. 2020, 112, 103639. [Google Scholar] [CrossRef]
- Shi, X.; Tan, C.; Dong, F.; dos Santos, E.N.; da Silva, M.J. Conductance Sensors for Multiphase Flow Measurement: A Review. IEEE Sens. J. 2021, 21, 12913–12925. [Google Scholar] [CrossRef]
- Midura, M.; Wróblewski, P.; Wanta, D.; Domański, G.; Stosio, M.; Kryszyn, J.; Smolik, W.T. The system for complex magnetic susceptibility measurement of nanoparticles with 3d printed carcass for integrated receive coils. Inform. Autom. Pomiary Gospod. Ochr. Sr. 2021, 11, 4–9. [Google Scholar] [CrossRef]
- Sekulska-Nalewajko, J.; Gocławski, J.; Korzeniewska, E. A method for the assessment of textile pilling tendency using optical coherence tomography. Sensors 2020, 20, 3687. [Google Scholar] [CrossRef]
- Rzasa, M.; Czapla-Nielacna, B. Analysis of the Influence of the Vortex Shedder Shape on the Metrological Properties of the Vortex Flow Meter. Sensors 2021, 21, 4697. [Google Scholar] [CrossRef]
- Fiala, P.; Bartušek, K.; Dědková, J.; Dohnal, P. EMG field analysis in dynamic microscopic/nanoscopic models of matter. Inform. Autom. Pomiary Gospod. Ochr. Sr. 2019, 9, 4–10. [Google Scholar] [CrossRef]
- Kłosowski, G.; Rymarczyk, T.; Wójcik, D.; Skowron, S.; Adamkiewicz, P. The Use of Time-Frequency Moments as Inputs of LSTM Network for ECG Signal Classification. Electronics 2020, 9, 1452. [Google Scholar] [CrossRef]
- Fawcett, T. An introduction to ROC analysis. Pattern Recognit. Lett. 2006, 27, 861–874. [Google Scholar] [CrossRef]
- Hand, D.J.; Till, R.J. A simple generalisation of the area under the roc curve for multiple class classification problems. Mach. Learn. 2001, 45, 171–186. [Google Scholar] [CrossRef]
- Rymarczyk, T.; Kozłowski, E.; Kłosowski, G.; Niderla, K. Logistic Regression for Machine Learning in Process Tomography. Sensors 2019, 19, 3400. [Google Scholar] [CrossRef] [Green Version]
- Wehrens, R. Chemometrics with R. Multivariate Data Analysis in the Natural Science and Life Sciences; Springer: New York, NY, USA, 2011. [Google Scholar]
- Hastie, T.; Tibshirani, R.; Friedman, J. The Elements of Statistical Learning: Data Mining, Inference, and Prediction; Springer Science & Business Media: New York, NY, USA, 2009. [Google Scholar]
- James, G.; Witten, D.; Hastie, T.; Tibshirani, R. An Introduction to Statistical Learning with Applications in R; Springer: New York, NY, USA, 2013. [Google Scholar]
- Tibshirani, R. Regression Shrinkage and Selection Via the Lasso. J. R. Stat. Soc. Ser. B 1996, 58, 267–288. [Google Scholar] [CrossRef]
- Friedman, J.; Tibshirani, R.; Hastie, T. Regularization paths for generalised linear models via coordinate descent. J. Stat. Softw. 2010, 33, 1–22. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yan, X.; Su, X.G. Linear Regression Analysis; World Scientific Publishing Company: London, UK, 2009. [Google Scholar]
- Percival, D.B.; Walden, A. Wavelet Methods for Time Series Analysis; Cambridge University Press: Cambridge, UK, 2000; Volume 4. [Google Scholar]
- Walnut, D.F. An Introduction to Wavelet Analysis; Springer Nature: Basingstoke, UK, 2004. [Google Scholar]














































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Advantages | Disadvantages | |
|---|---|---|
| Point measurements | Simple solution. Low costs. Constant monitoring. | No spatial analysis of the study site. Invasive. |
| Thermography | Ability to quickly analyze the external shaft. Low cost. Non-invasive. | No information on damage, internal seepage. Unit measurements. |
| Geophysical methods | Large area analysis/ Non-invasive. | Low efficiency in testing for leakage and shaft saturation. |
| Ground penetrating radar | Quick and easy measurements. Low costs. Non-invasive. | Proper development of radarograms is very complicated. |
| Optical methods | Ability to analyze the dike along its course. Continuous monitoring. | No information on area changes. |
| Electrical Resistance Tomography device | Ability to analyze 2D/3D parts of the shaft with the ERT device. Non-invasive. | Using only built-in measurement and reconstruction methods. Unit measurements. |
| Distributed electrical impedance tomography system | Area ability analyze any portion of the levee or all of it through a distributed cyber-physical system. Continuous monitoring. Non-invasive. | High costs. |
| Positive | Negative | |
|---|---|---|
| PositivePrediction | TP | FP |
| NegativePrediction | FN | TN |
| Elasticnet | PCA | Wave | |
|---|---|---|---|
| Sensitivity | 0.9697954 | 0.9808379 | 0.9632998 |
| Specificity | 0.9984709 | 0.9997816 | 0.9912626 |
| Pos Pred Value | 0.9976612 | 0.9996690 | 0.9866933 |
| Neg Pred Value | 0.9800600 | 0.9872735 | 0.9757041 |
| Precision | 0.9976612 | 0.9996690 | 0.9866933 |
| Recall | 0.9697954 | 0.9808379 | 0.9632998 |
| F1 | 0.9835310 | 0.9901639 | 0.9748562 |
| Prevalence | 0.4021157 | 0.4021157 | 0.4021157 |
| Detection Rate | 0.3899700 | 0.3944103 | 0.3873580 |
| Detection Prevalence | 0.3908842 | 0.3945409 | 0.3925820 |
| Balanced Accuracy | 0.9841332 | 0.9903097 | 0.9772812 |
| AUC | 0.9995741 | 0.9998988 | 0.9980552 |
| Elasticnet | PCA | Wave | |
|---|---|---|---|
| Sensitivity | 0.9746222 | 0.9923011 | 0.9751925 |
| Specificity | 0.9966265 | 0.9975904 | 0.9795181 |
| Pos Pred Value | 0.9959207 | 0.9971347 | 0.9757489 |
| Neg Pred Value | 0.9789349 | 0.9935205 | 0.9790462 |
| Precision | 0.9959207 | 0.9971347 | 0.9757489 |
| Recall | 0.9746222 | 0.9923011 | 0.9751925 |
| F1 | 0.9851564 | 0.9947120 | 0.9754706 |
| Prevalence | 0.4580123 | 0.4580123 | 0.4580123 |
| Detection Rate | 0.4463889 | 0.4544861 | 0.4466501 |
| Detection Prevalence | 0.4482173 | 0.4557921 | 0.4577511 |
| Balanced Accuracy | 0.9856243 | 0.9949457 | 0.9773553 |
| AUC | 0.9994711 | 0.9999436 | 0.9983900 |
| Elasticnet | PCA | Wave | |
|---|---|---|---|
| Sensitivity | 1.0000000 | 0.9989063 | 0.9963544 |
| Specificity | 0.8658934 | 0.9277574 | 0.8858364 |
| Pos Pred Value | 0.8062904 | 0.8852989 | 0.8296903 |
| Neg Pred Value | 1.0000000 | 0.9993424 | 0.9977080 |
| Precision | 0.8062904 | 0.8852989 | 0.8296903 |
| Recall | 1.0000000 | 0.9989063 | 0.9963544 |
| F1 | 0.8927583 | 0.9386776 | 0.9054166 |
| Prevalence | 0.3582343 | 0.3582343 | 0.3582343 |
| Detection Rate | 0.3582343 | 0.3578425 | 0.3569283 |
| Detection Prevalence | 0.4442993 | 0.4042053 | 0.4301946 |
| Balanced Accuracy | 0.9329467 | 0.9633319 | 0.9410954 |
| AUC | 0.9965007 | 0.9984147 | 0.9947318 |
| Elasticnet | PCA | Wave | |
|---|---|---|---|
| Sensitivity | 1.0000000 | 1.0000000 | 1.0000000 |
| Specificity | 0.7619853 | 0.9125776 | 0.7507050 |
| Pos Pred Value | 0.9500828 | 0.9810675 | 0.9478405 |
| Neg Pred Value | 1.0000000 | 1.0000000 | 1.0000000 |
| Precision | 0.9500828 | 0.9810675 | 0.9478405 |
| Recall | 1.0000000 | 1.0000000 | 1.0000000 |
| F1 | 0.9744025 | 0.9904433 | 0.9732219 |
| Prevalence | 0.8191739 | 0.8191739 | 0.8191739 |
| Detection Rate | 0.8191739 | 0.8191739 | 0.8191739 |
| Detection Prevalence | 0.8622132 | 0.8349822 | 0.8642529 |
| Balanced Accuracy | 0.8809927 | 0.9562888 | 0.8753525 |
| AUC | 0.9995332 | 0.9998610 | 0.9978940 |
| Elasticnet | PCA | Wave | |
|---|---|---|---|
| Sensitivity | 0.9912896 | 0.9893775 | 0.9923518 |
| Specificity | 0.9784229 | 0.9856807 | 0.9354649 |
| Pos Pred Value | 0.9769682 | 0.9845666 | 0.9342000 |
| Neg Pred Value | 0.9918473 | 0.9901478 | 0.9925078 |
| Precision | 0.9769682 | 0.9845666 | 0.9342000 |
| Recall | 0.9912896 | 0.9893775 | 0.9923518 |
| F1 | 0.9840768 | 0.9869662 | 0.9623983 |
| Prevalence | 0.4800612 | 0.4800612 | 0.4800612 |
| Detection Rate | 0.4758797 | 0.4749618 | 0.4763896 |
| Detection Prevalence | 0.4870984 | 0.4824069 | 0.5099439 |
| Balanced Accuracy | 0.9848562 | 0.9875291 | 0.9639084 |
| AUC | 0.9994805 | 0.9994952 | 0.9978997 |
| Elasticnet | PCA | Wave | |
|---|---|---|---|
| Sensitivity | 0.9705573 | 0.9826498 | 0.9613565 |
| Specificity | 1.0000000 | 0.9973338 | 0.9951675 |
| Pos Pred Value | 1.0000000 | 0.9957379 | 0.9921324 |
| Neg Pred Value | 0.9816784 | 0.9890927 | 0.9759765 |
| Precision | 1.0000000 | 0.9957379 | 0.9921324 |
| Recall | 0.9705573 | 0.9826498 | 0.9613565 |
| F1 | 0.9850587 | 0.9891506 | 0.9765020 |
| Prevalence | 0.3879653 | 0.3879653 | 0.3879653 |
| Detection Rate | 0.3765426 | 0.3812341 | 0.3729730 |
| Detection Prevalence | 0.3765426 | 0.3828659 | 0.3759306 |
| Balanced Accuracy | 0.9852787 | 0.9899918 | 0.9782620 |
| AUC | 0.9998313 | 0.9998497 | 0.9993635 |
| Elasticnet | PCA | Wave | |
|---|---|---|---|
| Sensitivity | 0.9993290 | 1.0000000 | 0.9793659 |
| Specificity | 0.9878393 | 0.9936764 | 0.9857963 |
| Pos Pred Value | 0.9794476 | 0.9892134 | 0.9756016 |
| Neg Pred Value | 0.9996062 | 1.0000000 | 0.9880070 |
| Precision | 0.9794476 | 0.9892134 | 0.9756016 |
| Recall | 0.9993290 | 1.0000000 | 0.9793659 |
| F1 | 0.9892884 | 0.9945775 | 0.9774801 |
| Prevalence | 0.3670567 | 0.3670567 | 0.3670567 |
| Detection Rate | 0.3668103 | 0.3670567 | 0.3594828 |
| Detection Prevalence | 0.3745074 | 0.3710591 | 0.3684729 |
| Balanced Accuracy | 0.9935841 | 0.9968382 | 0.9825811 |
| AUC | 0.9998543 | 0.9999899 | 0.9992118 |
| Elasticnet | PCA | Wave | |
|---|---|---|---|
| Sensitivity | 0.9673838 | 0.9871617 | 0.9906315 |
| Specificity | 0.9870179 | 0.9842497 | 0.9722222 |
| Pos Pred Value | 0.9761905 | 0.9718190 | 0.9515081 |
| Neg Pred Value | 0.9821429 | 0.9928743 | 0.9947260 |
| Precision | 0.9761905 | 0.9718190 | 0.9515081 |
| Recall | 0.9673838 | 0.9871617 | 0.9906315 |
| F1 | 0.9717672 | 0.9794302 | 0.9706757 |
| Prevalence | 0.3549261 | 0.3549261 | 0.3549261 |
| Detection Rate | 0.3433498 | 0.3503695 | 0.3516010 |
| Detection Prevalence | 0.3517241 | 0.3605296 | 0.3695197 |
| Balanced Accuracy | 0.9772009 | 0.9857057 | 0.9814269 |
| AUC | 0.9989309 | 0.9994747 | 0.9992595 |
| Elasticnet | PCA | Wave | |
|---|---|---|---|
| Sensitivity | 0.9981336 | 0.9960237 | 0.9982959 |
| Specificity | 0.8562676 | 0.9793209 | 0.8593311 |
| Pos Pred Value | 0.9562311 | 0.9934439 | 0.9571306 |
| Neg Pred Value | 0.9931892 | 0.9873874 | 0.9937998 |
| Precision | 0.9562311 | 0.9934439 | 0.9571306 |
| Recall | 0.9981336 | 0.9960237 | 0.9982959 |
| F1 | 0.9767331 | 0.9947322 | 0.9772799 |
| Prevalence | 0.7588054 | 0.7588054 | 0.7588054 |
| Detection Rate | 0.7573892 | 0.7557882 | 0.7575123 |
| Detection Prevalence | 0.7920567 | 0.7607759 | 0.7914409 |
| Balanced Accuracy | 0.9272006 | 0.9876723 | 0.9288135 |
| AUC | 0.9981009 | 0.9995930 | 0.9978249 |
| Percentage of Variance | Cumulative Percentage of Variance | |
|---|---|---|
| comp 1 | 75.88 | 75.88 |
| comp 2 | 10.48 | 86.37 |
| comp 3 | 4.87 | 91.24 |
| comp 4 | 3.26 | 94.50 |
| comp 5 | 1.30 | 95.80 |
| comp 6 | 1.19 | 96.99 |
| comp 7 | 0.60 | 97.58 |
| comp 8 | 0.50 | 98.09 |
| comp 9 | 0.30 | 98.39 |
| comp 10 | 0.25 | 98.64 |
| Methods | TSS | MSE | MAE | MAPE |
|---|---|---|---|---|
| Logistic regression with Elasticnet | 788.349 | 0.049 | 0.083 | 4.201 |
| Logistic regression with PCA | 425.786 | 0.026 | 0.028 | 1.705 |
| Logistic regression with wavelet | 611.791 | 0.038 | 0.049 | 3.453 |
| Tikhonov regularization | 23,993.577 | 1.477 | 0.689 | 28.752 |
| Total variation | 7051.689 | 0.434 | 0.379 | 24.462 |
| Methods | TSS | MSE | MAE | MAPE |
|---|---|---|---|---|
| Logistic regression with Elasticnet | 3848.001 | 0.392 | 0.288 | 19.663 |
| Logistic regression with PCA | 2255.186 | 0.230 | 0.140 | 10.586 |
| Logistic regression with wavelet | 4683.420 | 0.478 | 0.262 | 11.266 |
| Tikhonov regularization | 6118.022 | 0.624 | 0.353 | 17.557 |
| Total variation | 1852.541 | 0.189 | 0.158 | 9.344 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rymarczyk, T.; Król, K.; Kozłowski, E.; Wołowiec, T.; Cholewa-Wiktor, M.; Bednarczuk, P. Application of Electrical Tomography Imaging Using Machine Learning Methods for the Monitoring of Flood Embankments Leaks. Energies 2021, 14, 8081. https://doi.org/10.3390/en14238081
Rymarczyk T, Król K, Kozłowski E, Wołowiec T, Cholewa-Wiktor M, Bednarczuk P. Application of Electrical Tomography Imaging Using Machine Learning Methods for the Monitoring of Flood Embankments Leaks. Energies. 2021; 14(23):8081. https://doi.org/10.3390/en14238081
Chicago/Turabian StyleRymarczyk, Tomasz, Krzysztof Król, Edward Kozłowski, Tomasz Wołowiec, Marta Cholewa-Wiktor, and Piotr Bednarczuk. 2021. "Application of Electrical Tomography Imaging Using Machine Learning Methods for the Monitoring of Flood Embankments Leaks" Energies 14, no. 23: 8081. https://doi.org/10.3390/en14238081
APA StyleRymarczyk, T., Król, K., Kozłowski, E., Wołowiec, T., Cholewa-Wiktor, M., & Bednarczuk, P. (2021). Application of Electrical Tomography Imaging Using Machine Learning Methods for the Monitoring of Flood Embankments Leaks. Energies, 14(23), 8081. https://doi.org/10.3390/en14238081