
Hybrid Forecast and Control Chain for Operation of Flexibility Assets in Micro-Grids

 , , ,
, , , 
Abstract
1. Introduction
2. State-of-the-Art Review and Related Work
2.1. Photovoltaic (PV) Forecasting
2.2. Load Forecasting
2.3. Scheduling and Optimization
2.4. Summary from the State of the Art
- Hybrid long- and short-range forecast and optimization are needed to better exploit resources ahead-of-time and deal with uncertainties;
- It is necessary to reduce unnecessary complexity of the calculations where possible to make separate modules more flexible in terms of time and computation;
- Regressive model with and without recurrence units can handle long- and short-range forecasting, respectively;
- An evolutionary algorithm and a greedy one can handle long- and short-range optimizations, respectively.
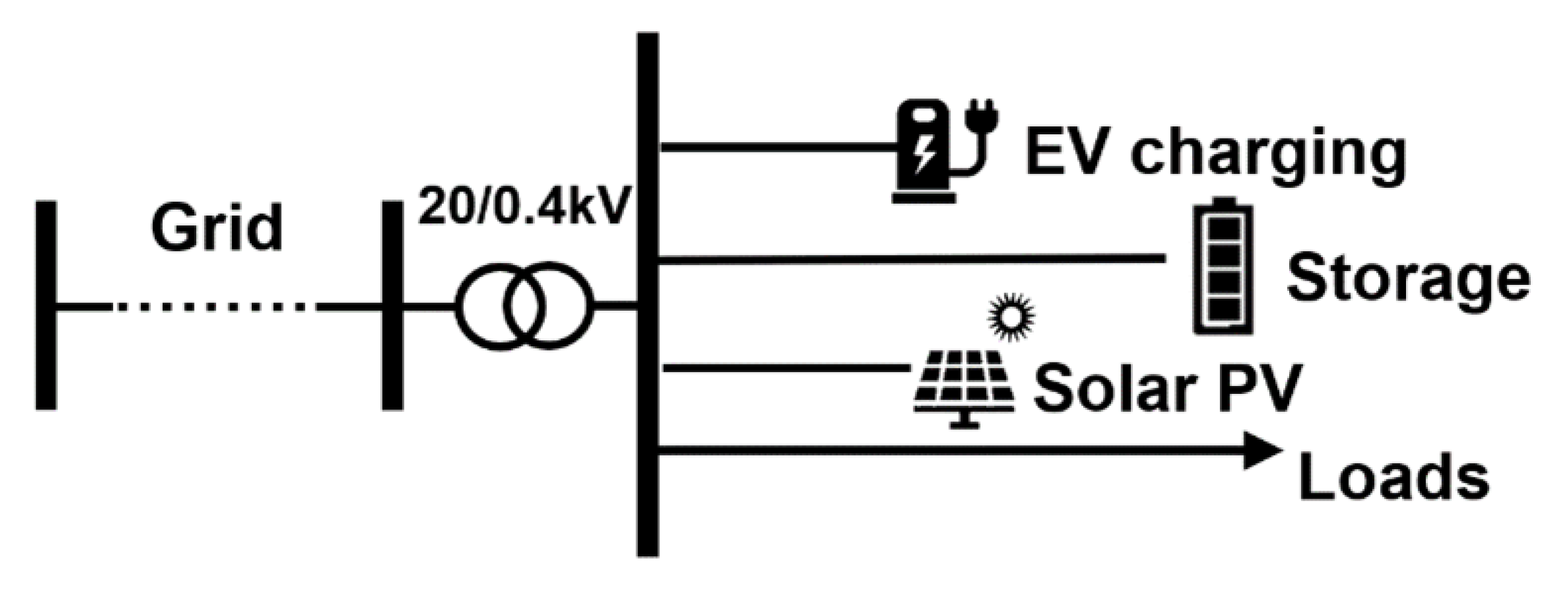
3. Management Process for Microgrid Operation
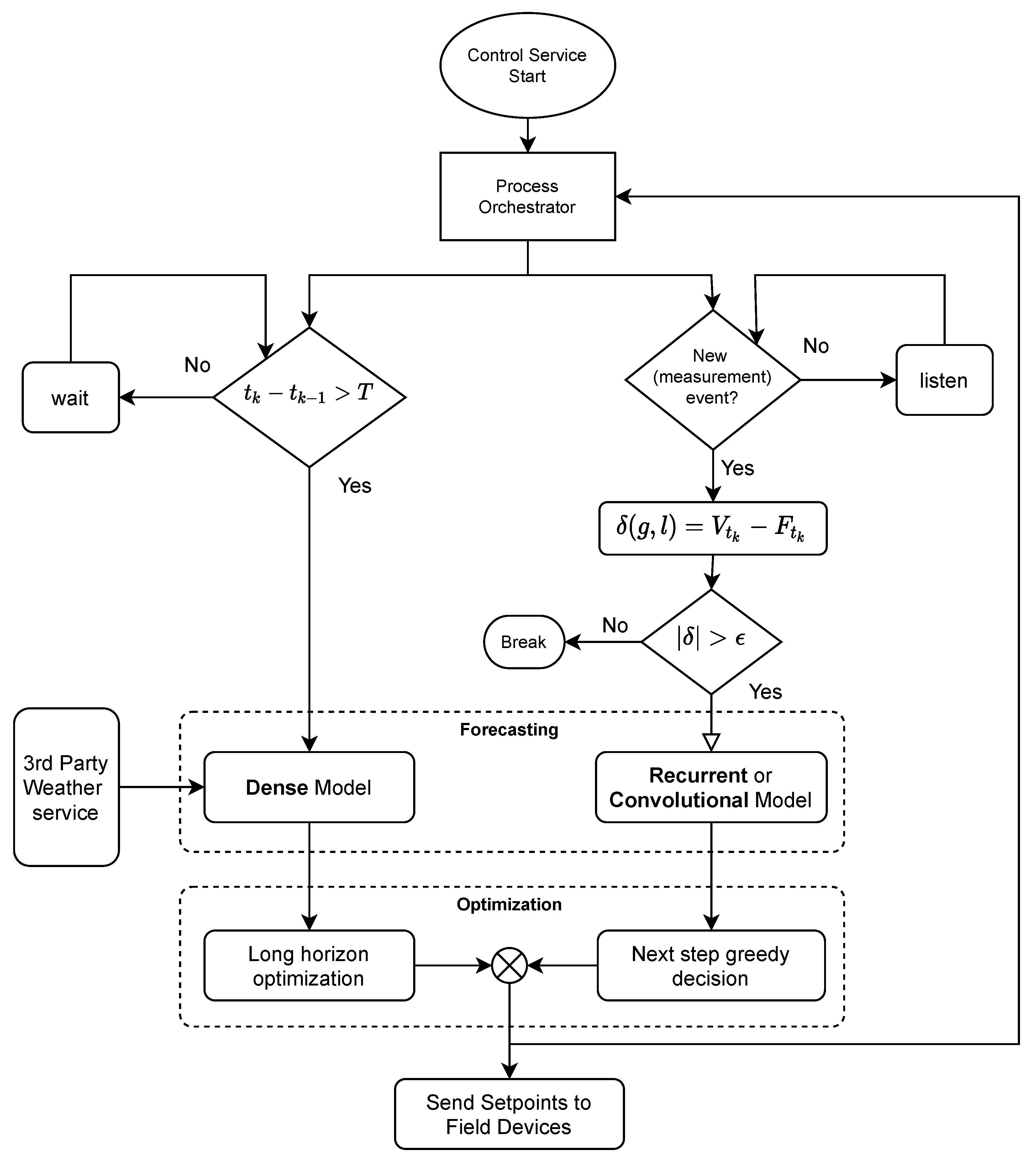
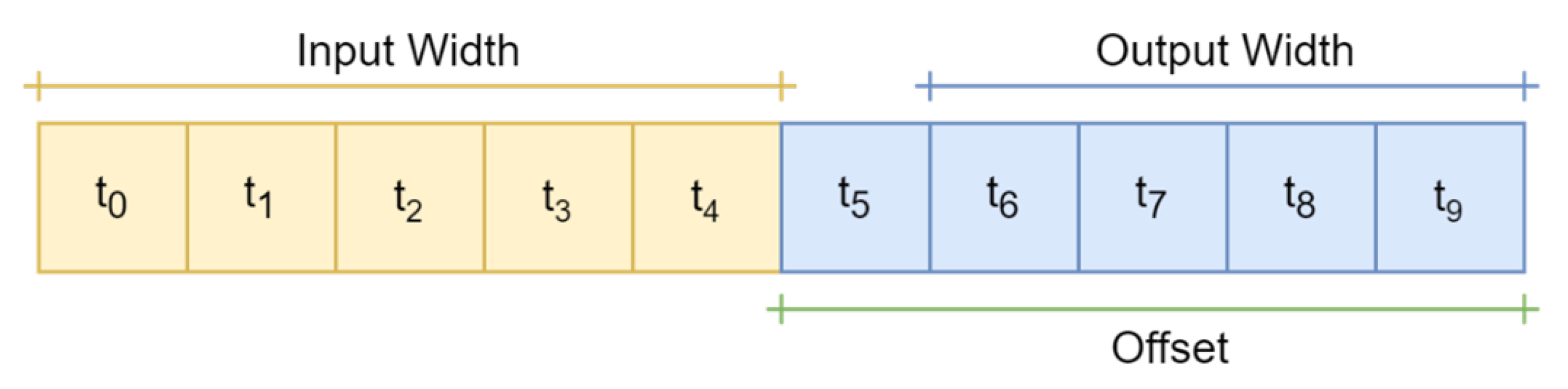
- A baseline regressive model to generate a forecast with long horizon H and big granularity, e.g., 48 h and 30 min, respectively.
- A recurrent model, for smaller time horizon and steps, e.g., 5 min ahead and 10 s steps, which gets activated upon errors between observed values and long-term forecast model.
- Longer horizon and wider step optimization, matching baseline forecast (same time window and step) and triggered by that forecast updates. This optimization uses the meta-heuristics method as it deals with a complex problem, while it is less constrained in terms of calculation time.
- Spot decision-maker, namely greedy optimization, for very close actions, triggered by the recurrent forecast model.
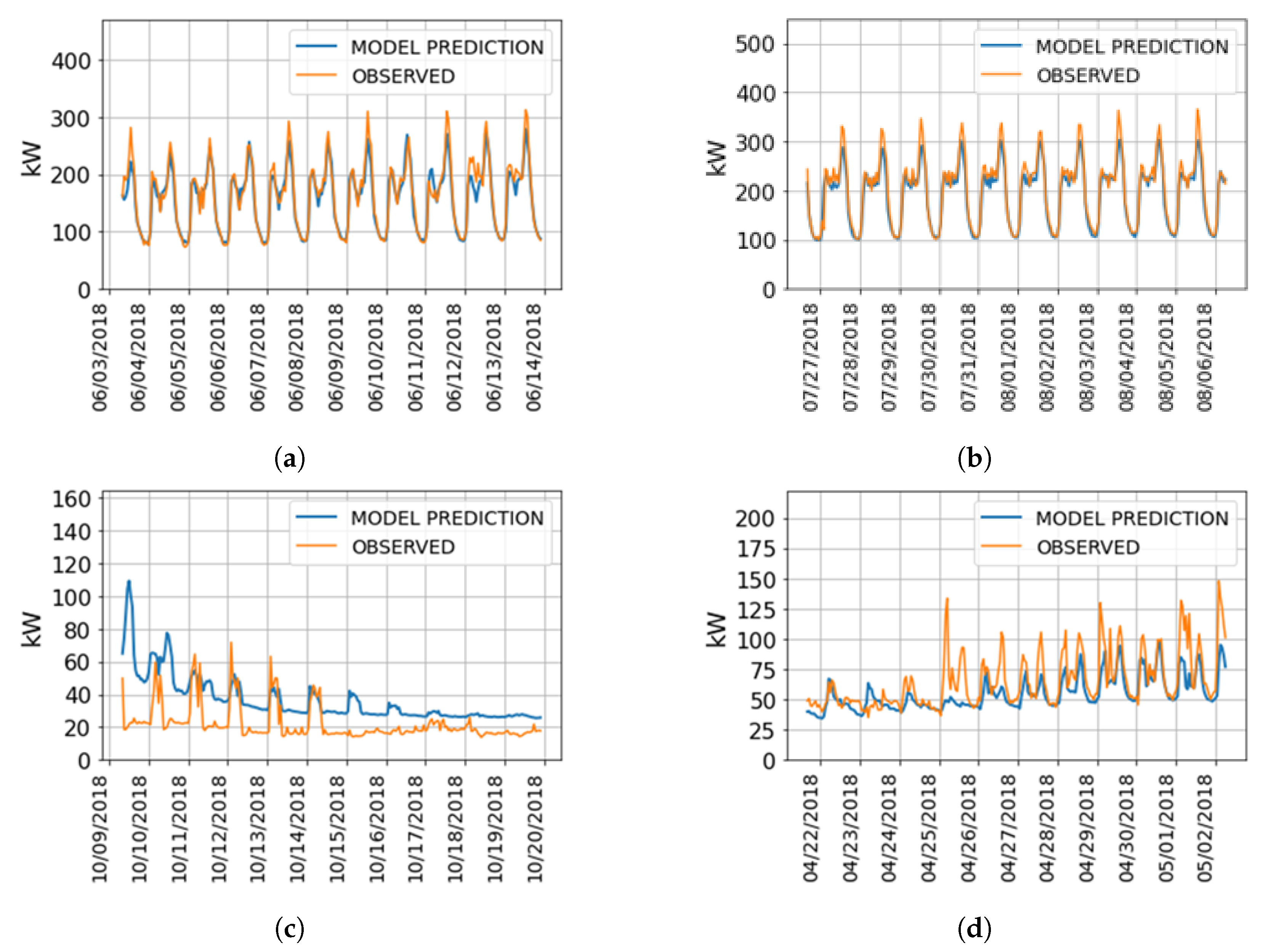
4. Forecasting
4.1. Renewable Generation
4.1.1. The Hybrid Approach
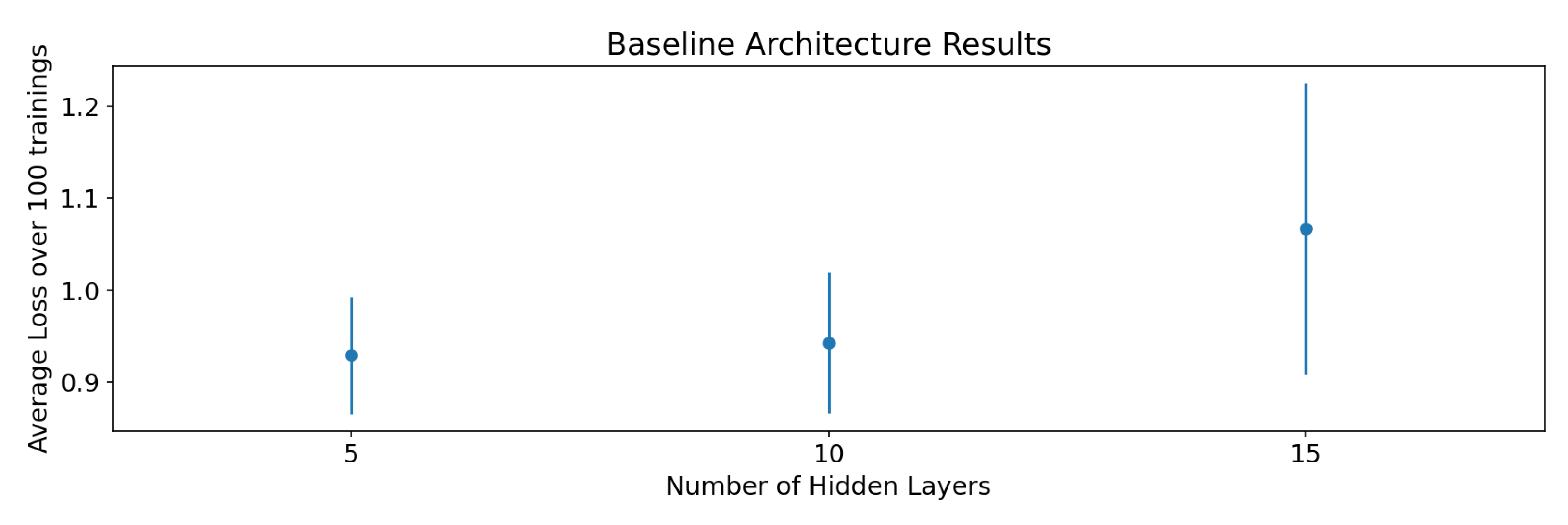
Long-Term Neural Network Design
- Baseline Layer Hidden Size - hidden_size
- Number of Baseline Layers -
- Batch Size - batch_size
- Dropout Rate - dropout_rate
Short-Term Neural Network Design
- Long Short-Term Memory (LSTM) [39]: a key recurrent neural network architecture that outperformed vanilla RNNs by solving the vanishing gradient problems by the usage of additive components and forget gate activations;
- Gated Recurrent Unit (GRU) [40]: a type of recurrent neural network similar to an LSTM. The main difference is that it has only two gates (reset gate and update gate) and no output gate. Generally, it is easier and faster to train than the LSTM architecture.
- WaveNet [41]: it is a type of convolutional neural network developed in the context of the homonymous audio generative model. The architecture is based on dilated casual convolutions, which unveil a very large receptive field suitable to deal with long-range temporal dependencies.
- LSTM and GRU
- Layer Hidden Size - hidden_size
- Number of Layers -
- Dropout Rate -
- WaveNet
- Layer Hidden Size - hidden_size
- Dropout Rate -
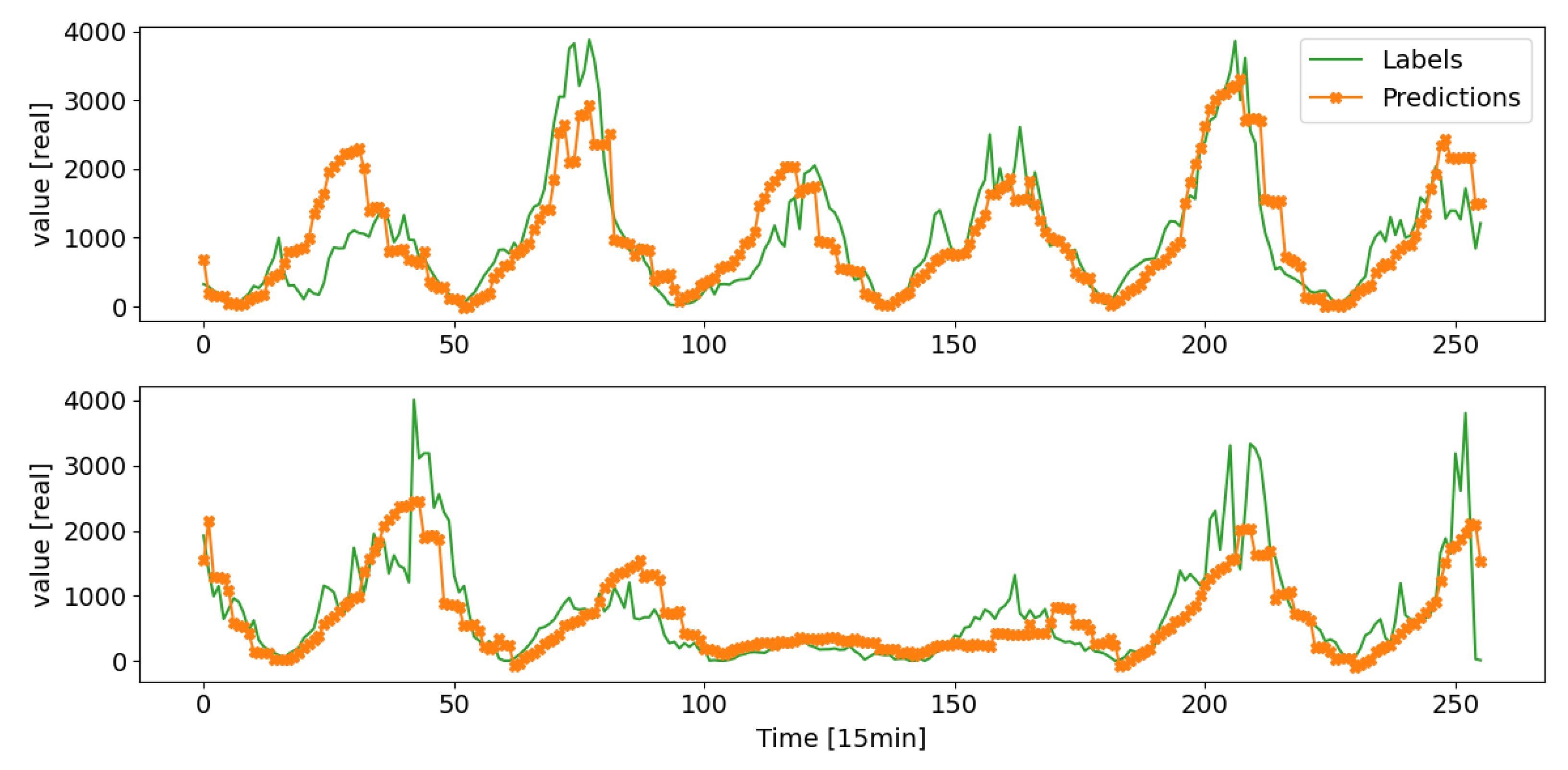
4.2. Load Consumption
5. Optimization-Based Control
5.1. Price-Related Parameters
- Base energy item: hourly energy cost with two-timing slots and , and corresponding tariffs called Competitive Energy Tariffs (CET), namely , .
- Base power item: charge being activated for certain time slots () and applied to the peak power in that time-slot, called Competitive Power Tariffs (CPT). Where is the time slot between 7 a.m. and 11 p.m. on working days.
- TSO Charge Power: or so-called Regulatory TSO Charge Power (TSOP) applied to the power term for a certain slot of time , as a regulatory charge for using the infrastructure of the transmission network.
- DSO Charge Power: or so-called Regulatory DSO Charge Power (DSOP) applied to the power term for a certain slot of time (), as a regulatory charges for using the infrastructure of the distribution network.
- DSO Charge Energy: or so-called Regulatory DSO Charge Energy (DSOE) applied to the energy term for a certain slot of time (), as a sort of regulatory charges for using the infrastructure of the distribution network. Time slots coincide with the same as in first item.
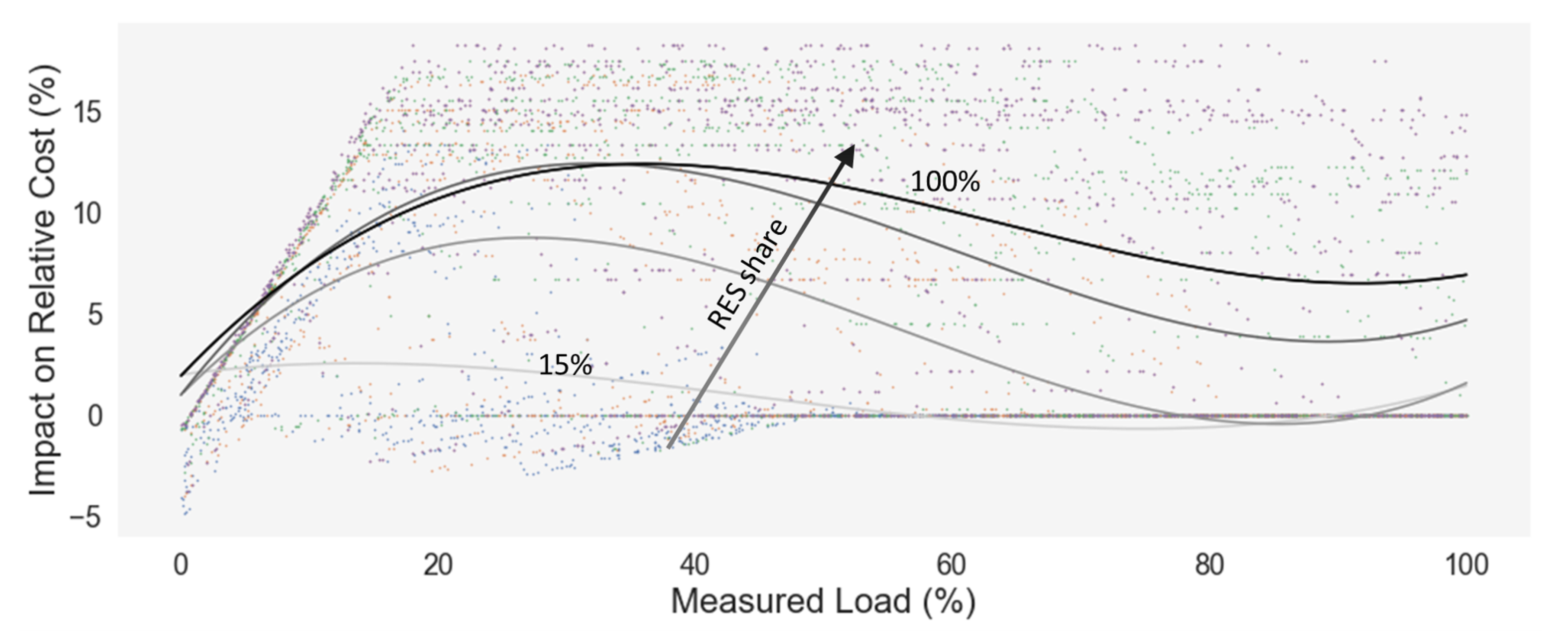
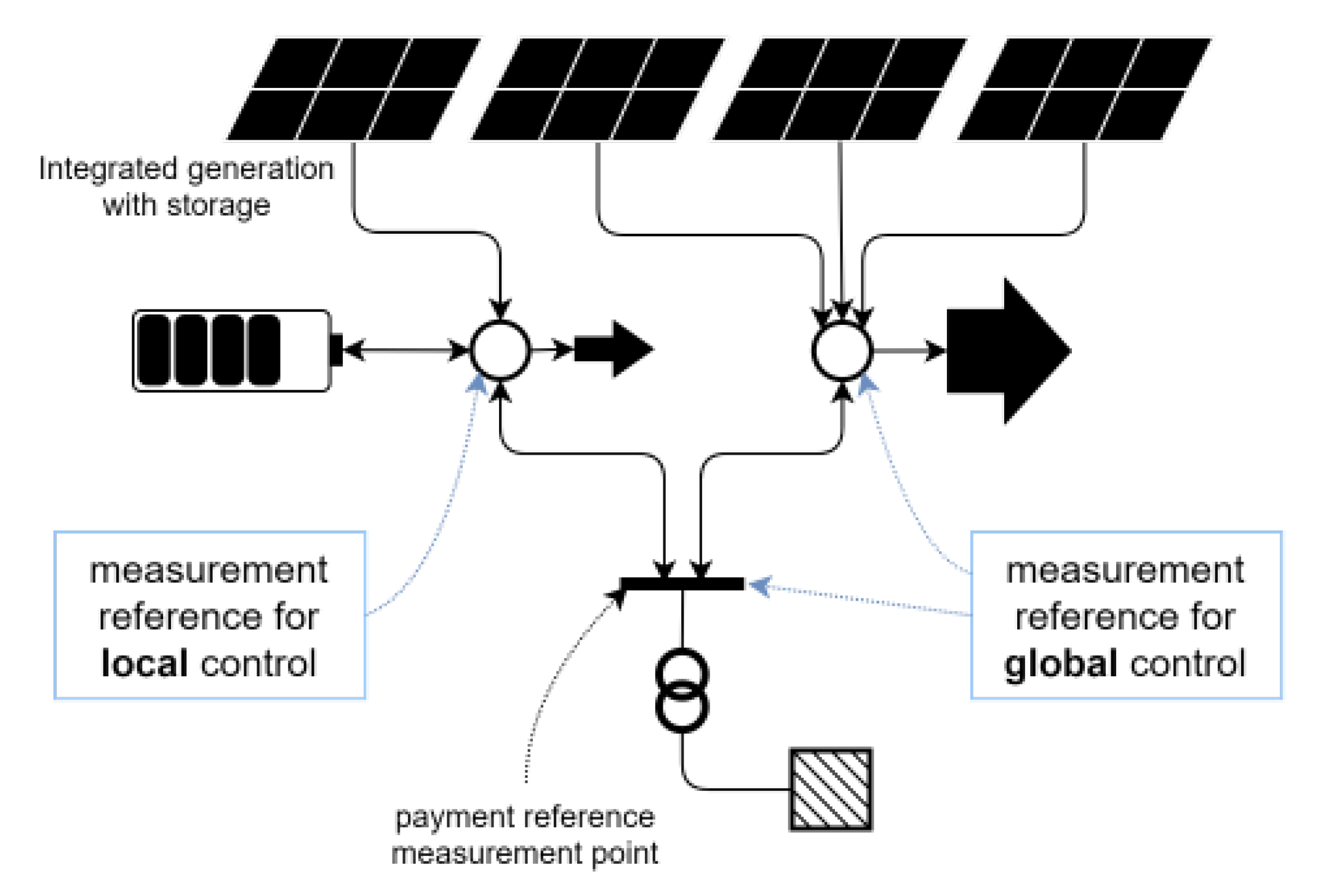
5.2. Localized Control Considerations
5.3. Proposed Method
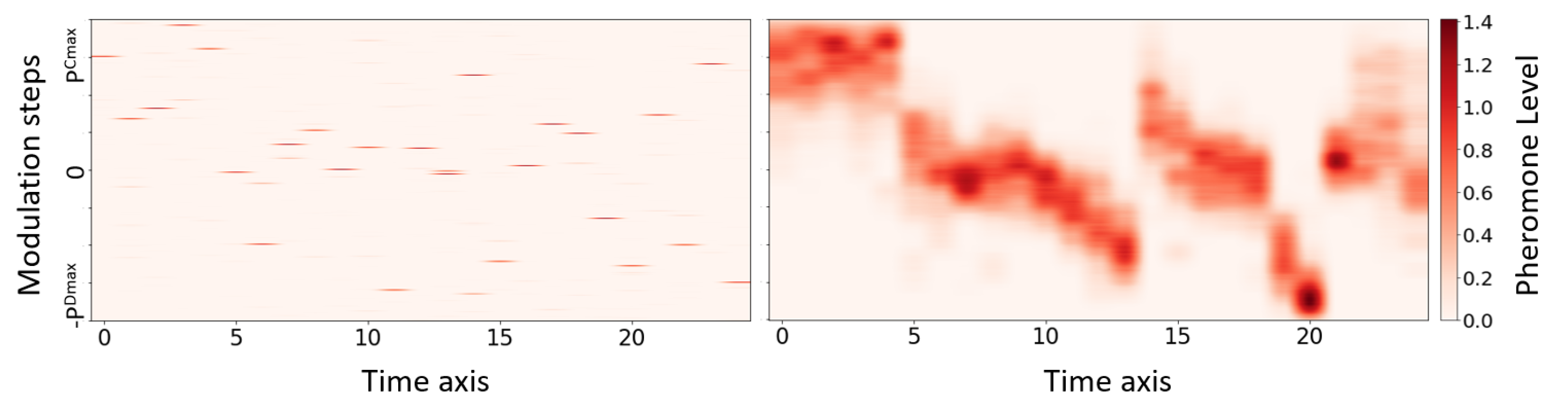
5.3.1. ACO for Smart Storage System Management
- From certain state , a group of artificial ants with a population of individuals start exploring the search space towards the end of a single path, according to the pheromones left on the route, but also the quality of next states. This forms a single solution.
- Evaluation of the found solution and associate it with a pheromone level, to be left on the path.
- Add the pheromone which is directly proportional with solution goodness on the traveled path.
- Apply evaporation rule, to balance the chances to select other routes, to avoid getting stuck in local optima.
- Repeating step 1 until a stop criterion is met.
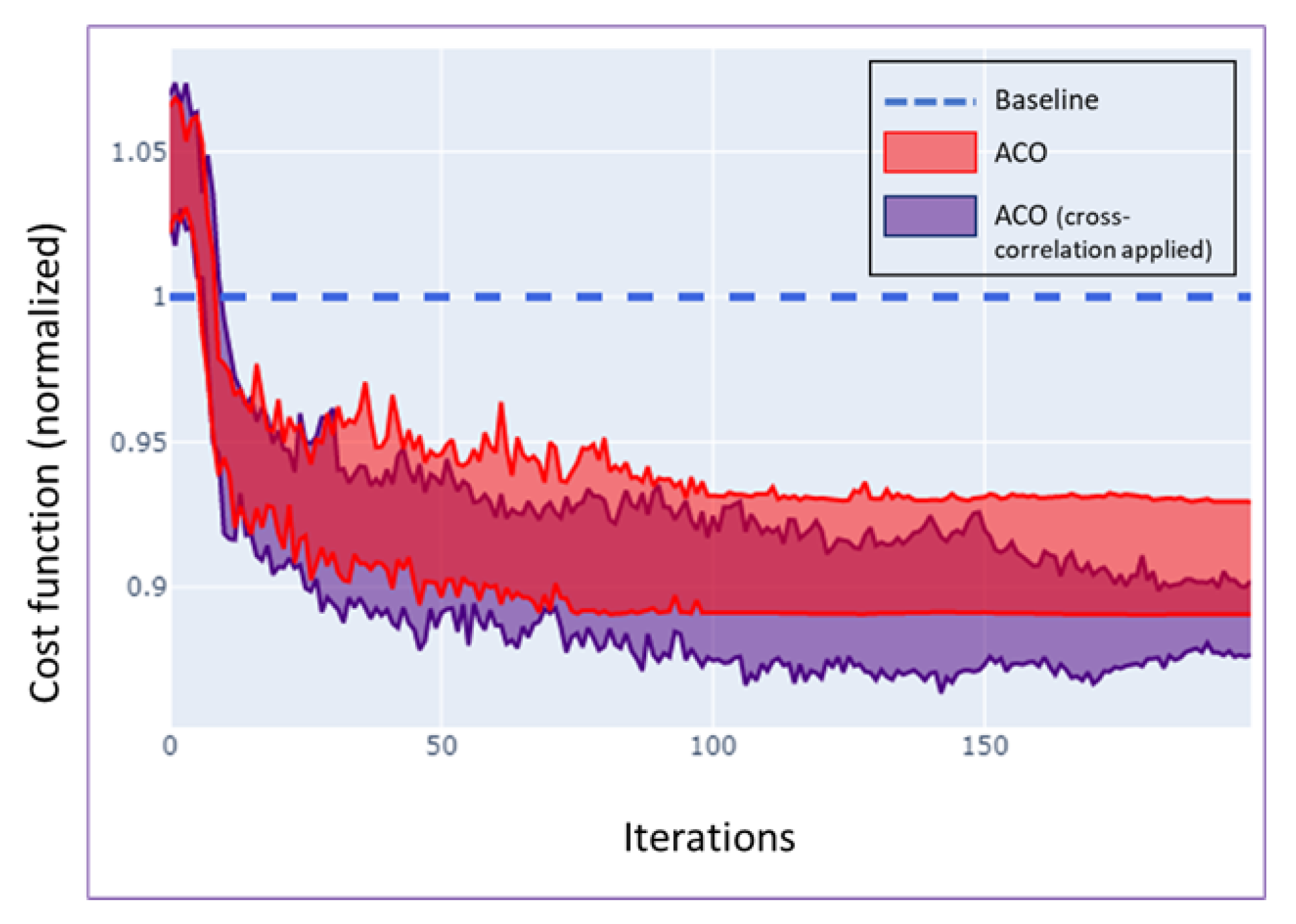
5.3.2. Extended ACO for Smart Storage System Management
5.3.3. Greedy Logic
5.3.4. Reactive Power Support
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Edmund, G.; Brown, G., Jr. Microgrid Analysis and Case Studies Report–California, North America, and Global Case Studies; Technical Report; California Energy Commission: San Francisco, CA, USA, 2008. [Google Scholar]
- Hatziargyriou, N.; Asano, H.; Iravani, R.; Marnay, C. Microgrids. IEEE Power Energy Mag. 2007, 5, 78–94. [Google Scholar] [CrossRef]
- Skarvelis-Kazakos, S.; Papadopoulos, P.; Unda, I.G.; Gorman, T.; Belaidi, A.; Zigan, S. Multiple energy carrier optimisation with intelligent agents. Appl. Energy 2016, 167, 323–335. [Google Scholar] [CrossRef]
- Karfopoulos, E.L.; Papadopoulos, P.; Skarvelis-Kazakos, S.; Grau, I.; Cipcigan, L.M.; Hatziargyriou, N.; Jenkins, N. Introducing electric vehicles in the microgrids concept. In Proceedings of the 2011 16th International Conference on Intelligent System Applications to Power Systems, Hersonissos, Greece, 25–28 September 2011; pp. 1–6. [Google Scholar]
- Tsikalakis, A.G.; Hatziargyriou, N.D. Centralized control for optimizing microgrids operation. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–8. [Google Scholar]
- Ali, H.; Hussain, A.; Bui, V.H.; Kim, H.M. Consensus algorithm-based distributed operation of microgrids during grid-connected and islanded modes. IEEE Access 2020, 8, 78151–78165. [Google Scholar] [CrossRef]
- Hatziargyriou, N. Microgrids: Architectures and Control; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Ren, Y.; Suganthan, P.; Srikanth, N. Ensemble methods for wind and solar power forecasting—A state-of-the-art review. Renew. Sustain. Energy Rev. 2015, 50, 82–91. [Google Scholar] [CrossRef]
- Diagne, M.; David, M.; Lauret, P.; Boland, J.; Schmutz, N. Review of solar irradiance forecasting methods and a proposition for small-scale insular grids. Renew. Sustain. Energy Rev. 2013, 27, 65–76. [Google Scholar] [CrossRef]
- Sbrana, G.; Silvestrini, A. Random switching exponential smoothing and inventory forecasting. Int. J. Prod. Econ. 2014, 156, 283–294. [Google Scholar] [CrossRef]
- David, M.; Ramahatana, F.; Trombe, P.J.; Lauret, P. Probabilistic forecasting of the solar irradiance with recursive ARMA and GARCH models. Sol. Energy 2016, 133, 55–72. [Google Scholar] [CrossRef]
- Haiges, R.; Wang, Y.; Ghoshray, A.; Roskilly, A. Forecasting electricity generation capacity in Malaysia: An auto regressive integrated moving average approach. Energy Procedia 2017, 105, 3471–3478. [Google Scholar] [CrossRef]
- Cadenas, E.; Rivera, W.; Campos-Amezcua, R.; Heard, C. Wind speed prediction using a univariate ARIMA model and a multivariate NARX model. Energies 2016, 9, 109. [Google Scholar] [CrossRef]
- Bui, K.T.T.; Bui, D.T.; Zou, J.; Van Doan, C.; Revhaug, I. A novel hybrid artificial intelligent approach based on neural fuzzy inference model and particle swarm optimization for horizontal displacement modeling of hydropower dam. Neural Comput. Appl. 2018, 29, 1495–1506. [Google Scholar] [CrossRef]
- Hertz, J.A. Introduction to the Theory of Neural Computation; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Deng, L.; Yu, D. Deep Learning: Methods and Applications. Found. Trends Signal Process. 2014, 7, 197–387. [Google Scholar] [CrossRef]
- Hao, Y.; Dong, L.; Liang, J.; Liao, X.; Wang, L.; Shi, L. Power forecasting-based coordination dispatch of PV power generation and electric vehicles charging in microgrid. Renew. Energy 2020, 155, 1191–1210. [Google Scholar] [CrossRef]
- Wen, L.; Zhou, K.; Yang, S.; Lu, X. Optimal load dispatch of community microgrid with deep learning based solar power and load forecasting. Energy 2019, 171, 1053–1065. [Google Scholar] [CrossRef]
- Sabzehgar, R.; Amirhosseini, D.Z.; Rasouli, M. Solar power forecast for a residential smart microgrid based on numerical weather predictions using artificial intelligence methods. J. Build. Eng. 2020, 32, 101629. [Google Scholar] [CrossRef]
- Anwar, T.; Sharma, B.; Chakraborty, K.; Sirohia, H. Introduction to Load Forecasting. Int. J. Pure Appl. Math. 2018, 119, 1527–1538. [Google Scholar]
- Hong, T.; Fan, S. Probabilistic electric load forecasting: A tutorial review. Int. J. Forecast. 2016, 32, 914–938. [Google Scholar] [CrossRef]
- Baliyan, A.; Gaurav, K.; Mishra, S.K. A review of short term load forecasting using artificial neural network models. Procedia Comput. Sci. 2015, 48, 121–125. [Google Scholar] [CrossRef]
- Almeshaiei, E.; Soltan, H. A methodology for electric power load forecasting. Alex. Eng. J. 2011, 50, 137–144. [Google Scholar] [CrossRef]
- Ortega-Vazquez, M.A.; Kirschen, D.S. Economic impact assessment of load forecast errors considering the cost of interruptions. In Proceedings of the 2006 IEEE Power Engineering Society General Meeting, Montreal, QC, Canada, 18–22 June 2006; pp. 1–8. [Google Scholar]
- Carvallo, J.P.; Larsen, P.H.; Sanstad, A.H.; Goldman, C.A. Long term load forecasting accuracy in electric utility integrated resource planning. Energy Policy 2018, 119, 410–422. [Google Scholar] [CrossRef]
- Marzooghi, H.; Emami, K.; Wolfs, P.; Holcombe, B. Short-term Electric Load Forecasting in Microgrids: Issues and Challenges. In Proceedings of the 2018 Australasian Universities Power Engineering Conference (AUPEC), Auckland, New Zealand, 27–30 November 2018; pp. 1–6. [Google Scholar]
- Zinder, Y.; Ha Do, V.; Oğuz, C. Computational complexity of some scheduling problems with multiprocessor tasks. Discret. Optim. 2005, 2, 391–408. [Google Scholar] [CrossRef][Green Version]
- Tisseur, R.; de Bosio, F.; Chicco, G.; Fantino, M.; Pastorelli, M. Optimal scheduling of distributed energy storage systems by means of ACO algorithm. In Proceedings of the 2016 51st International Universities Power Engineering Conference (UPEC), Coimbra, Portugal, 6–9 September 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Mirtaheri, H.; Bortoletto, A.; Fantino, M.; Mazza, A.; Marzband, M. Optimal Planning and Operation Scheduling of Battery Storage Units in Distribution Systems. In Proceedings of the 2019 IEEE Milan PowerTech, Milan, Italy, 23–27 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Mazza, A.; Mirtaheri, H.; Chicco, G.; Russo, A.; Fantino, M. Location and Sizing of Battery Energy Storage Units in Low Voltage Distribution Networks. Energies 2020, 13, 52. [Google Scholar] [CrossRef]
- Jeong, B.C.; Shin, D.H.; Im, J.B.; Park, J.Y.; Kim, Y.J. Implementation of optimal two-stage scheduling of energy storage system based on big-data-driven forecasting—An actual case study in a campus microgrid. Energies 2019, 12, 1124. [Google Scholar] [CrossRef]
- Tang, D.H.; Eghbal, D. Cost optimization of battery energy storage system size and cycling with residential solar photovoltaic. In Proceedings of the 2017 Australasian Universities Power Engineering Conference (AUPEC), Melbourne, Australia, 19–22 November 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Telaretti, E.; Ippolito, M.; Dusonchet, L. A Simple Operating Strategy of Small-Scale Battery Energy Storages for Energy Arbitrage under Dynamic Pricing Tariffs. Energies 2016, 9, 12. [Google Scholar] [CrossRef]
- Vedullapalli, D.T.; Hadidi, R.; Schroeder, B. Combined HVAC and Battery Scheduling for Demand Response in a Building. IEEE Trans. Ind. Appl. 2019, 55, 7008–7014. [Google Scholar] [CrossRef]
- Meindl, B.; Templ, M. Analysis of Commercial and Free and Open Source Solvers for the Cell Suppression Problem. Trans. Data Privacy 2013, 6, 147–159. [Google Scholar]
- Yang, Z.; Long, K.; You, P.; Chow, M.Y. Joint Scheduling of Large-Scale Appliances and Batteries Via Distributed Mixed Optimization. IEEE Trans. Power Syst. 2015, 30, 2031–2040. [Google Scholar] [CrossRef]
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A simple way to prevent neural networks from overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Cho, K.; Van Merriënboer, B.; Gulcehre, C.; Bahdanau, D.; Bougares, F.; Schwenk, H.; Bengio, Y. Learning phrase representations using RNN encoder-decoder for statistical machine translation. arXiv 2014, arXiv:1406.1078. [Google Scholar]
- Oord, A.V.D.; Dieleman, S.; Zen, H.; Simonyan, K.; Vinyals, O.; Graves, A.; Kalchbrenner, N.; Senior, A.; Kavukcuoglu, K. Wavenet: A generative model for raw audio. arXiv 2016, arXiv:1609.03499. [Google Scholar]
- Delgoshaei, P.; Freihaut, J.D. Development of a Control Platform for a Building-Scale Hybrid Solar PV-Natural Gas Microgrid. Energies 2019, 12, 4202. [Google Scholar] [CrossRef]
- Wikner, E.; Thiringer, T. Extending Battery Lifetime by Avoiding High SOC. Appl. Sci. 2018, 8, 1825. [Google Scholar] [CrossRef]
- Nwankpa, C.; Ijomah, W.; Gachagan, A.; Marshall, S. Activation Functions: Comparison of trends in Practice and Research for Deep Learning. arXiv 2018, arXiv:1811.03378. [Google Scholar]
- Wang, C. Kernel Learning For Visual Perception. Ph.D. Thesis, Nanyang Technological University, Singapore, 2019. [Google Scholar]
- Xu, G.; Zhang, B.; Yang, L.; Wang, Y. Active and Reactive Power Collaborative Optimization for Active Distribution Networks Considering Bi-Directional V2G Behavior. Sustainability 2021, 13, 6489. [Google Scholar] [CrossRef]
- Andrade, I.; Pena, R.; Blasco-Gimenez, R.; Riedemann, J.; Jara, W.; Pesce, C. An Active/Reactive Power Control Strategy for Renewable Generation Systems. Electronics 2021, 10, 1061. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Temperature | Feels Like | Pressure | Humidity | Dew Point | UVI | Clouds | |
|---|---|---|---|---|---|---|---|
| id | temp | feels_like | pressure | humidity | dew_point | uvi | clouds |
| unit | °C | °C | hPa | % | °C | UV | % |
| mean | 10.78 | 8.09 | 1017.47 | 75.0 | 6.27 | 1.03 | 42.15 |
| std | 4.73 | 5.71 | 9.15 | 15.35 | 5.20 | 1.26 | 34.04 |
| min | −3.91 | −12.84 | 979.0 | 15.0 | −17.63 | 0.0 | 0.0 |
| max | 25.28 | 24.73 | 1047.0 | 100.0 | 20.83 | 4.25 | 100.0 |
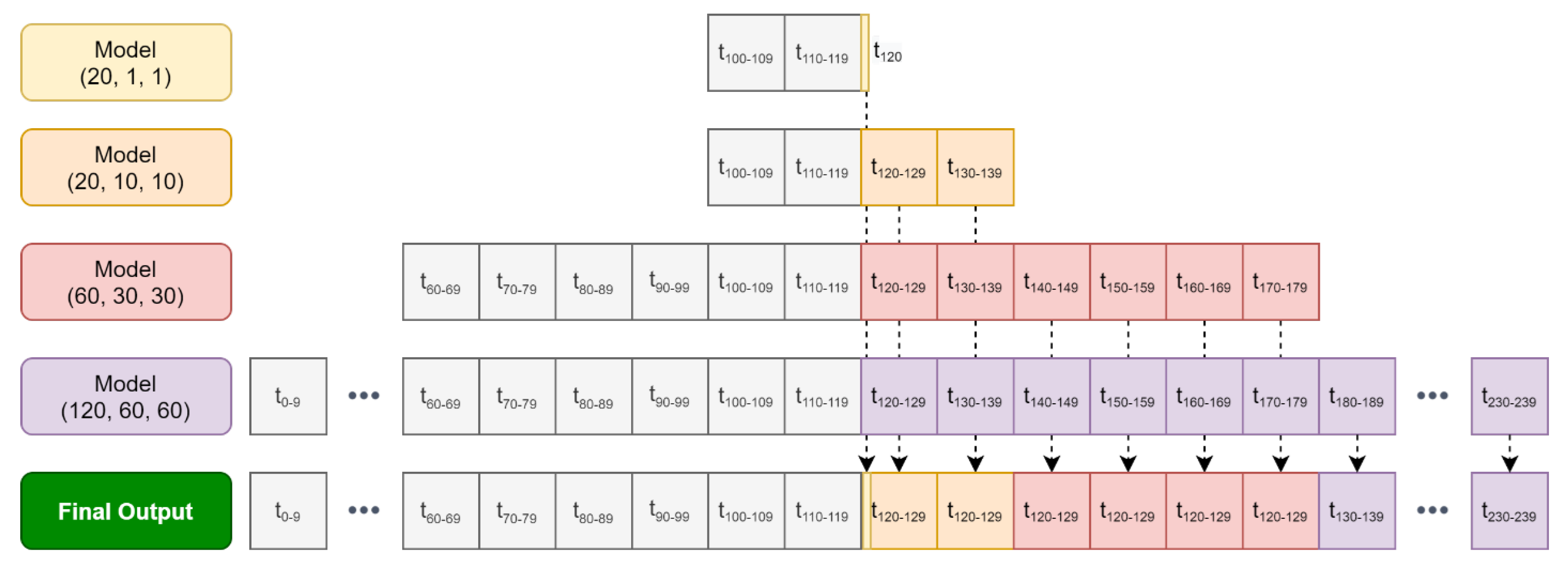
| Architecture | (20, 1, 1) | (20, 10, 10) | (60, 30, 30) | (120, 60, 60) |
|---|---|---|---|---|
| LSTM | 0.11502 | 0.15777 | 0.24711 | 0.34303 |
| GRU | 0.11405 | 0.18512 | 0.26997 | 0.34971 |
| WaveNet | 0.12145 | 0.15497 | 0.25024 | 0.35345 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mirtaheri, H.; Macaluso, P.; Fantino, M.; Efstratiadi, M.; Tsakanikas, S.; Papadopoulos, P.; Mazza, A. Hybrid Forecast and Control Chain for Operation of Flexibility Assets in Micro-Grids. Energies 2021, 14, 7252. https://doi.org/10.3390/en14217252
Mirtaheri H, Macaluso P, Fantino M, Efstratiadi M, Tsakanikas S, Papadopoulos P, Mazza A. Hybrid Forecast and Control Chain for Operation of Flexibility Assets in Micro-Grids. Energies. 2021; 14(21):7252. https://doi.org/10.3390/en14217252
Chicago/Turabian StyleMirtaheri, Hamidreza, Piero Macaluso, Maurizio Fantino, Marily Efstratiadi, Sotiris Tsakanikas, Panagiotis Papadopoulos, and Andrea Mazza. 2021. "Hybrid Forecast and Control Chain for Operation of Flexibility Assets in Micro-Grids" Energies 14, no. 21: 7252. https://doi.org/10.3390/en14217252
APA StyleMirtaheri, H., Macaluso, P., Fantino, M., Efstratiadi, M., Tsakanikas, S., Papadopoulos, P., & Mazza, A. (2021). Hybrid Forecast and Control Chain for Operation of Flexibility Assets in Micro-Grids. Energies, 14(21), 7252. https://doi.org/10.3390/en14217252