
Hybrid Controller Based on LQR Applied to Interleaved Boost Converter and Microgrids under Power Quality Events

 ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
- It proposes a hybrid controller ensuring voltage equilibrium at the PCC, according to the regulations overseeing MGs, while reducing harmonic content from nonlinear loads connected to the PCC.
- It provides a comparison between three MHs for finding the best controller configuration in terms of the IBC and MG dynamics.
- It describes controller performance for an IBC connected to VSI while the MG is working in grid-tied mode.
- It delivers different controller proposals that outperform recent developments from relevant literature while using photovoltaic cells as an energy source.
- It introduces a testing scenario closer to reality, which includes non-ideal elements such as voltage sources.
2. Fundamentals
2.1. Interleaved Boost Converter Model
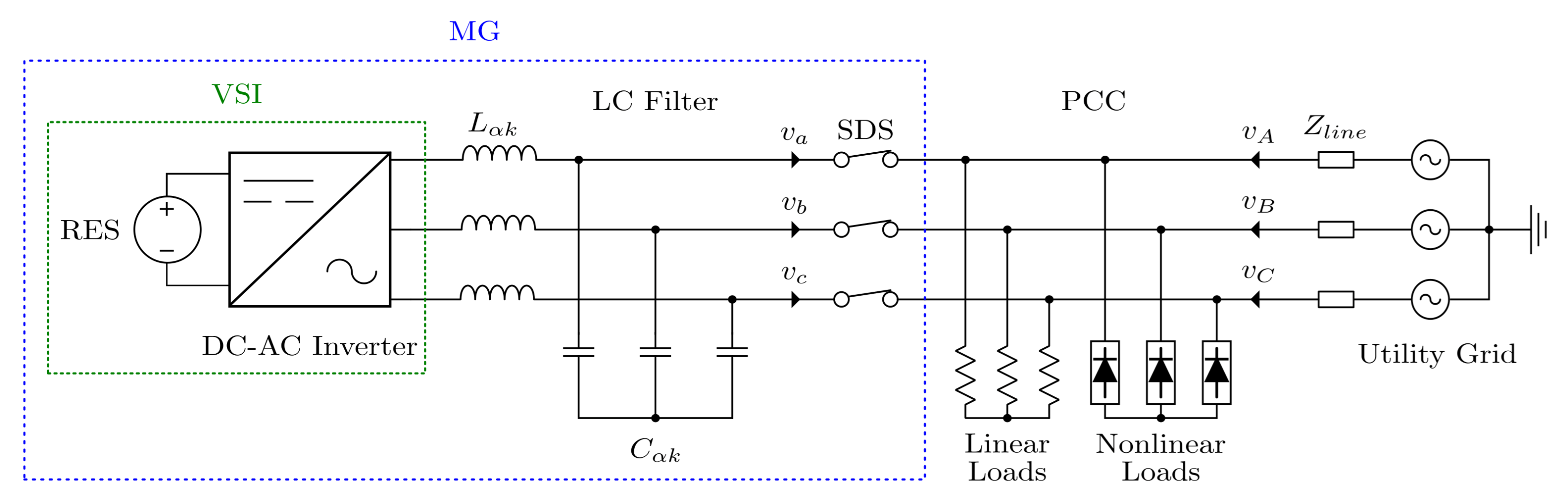
2.2. Microgrid Model
2.3. Metaheuristics
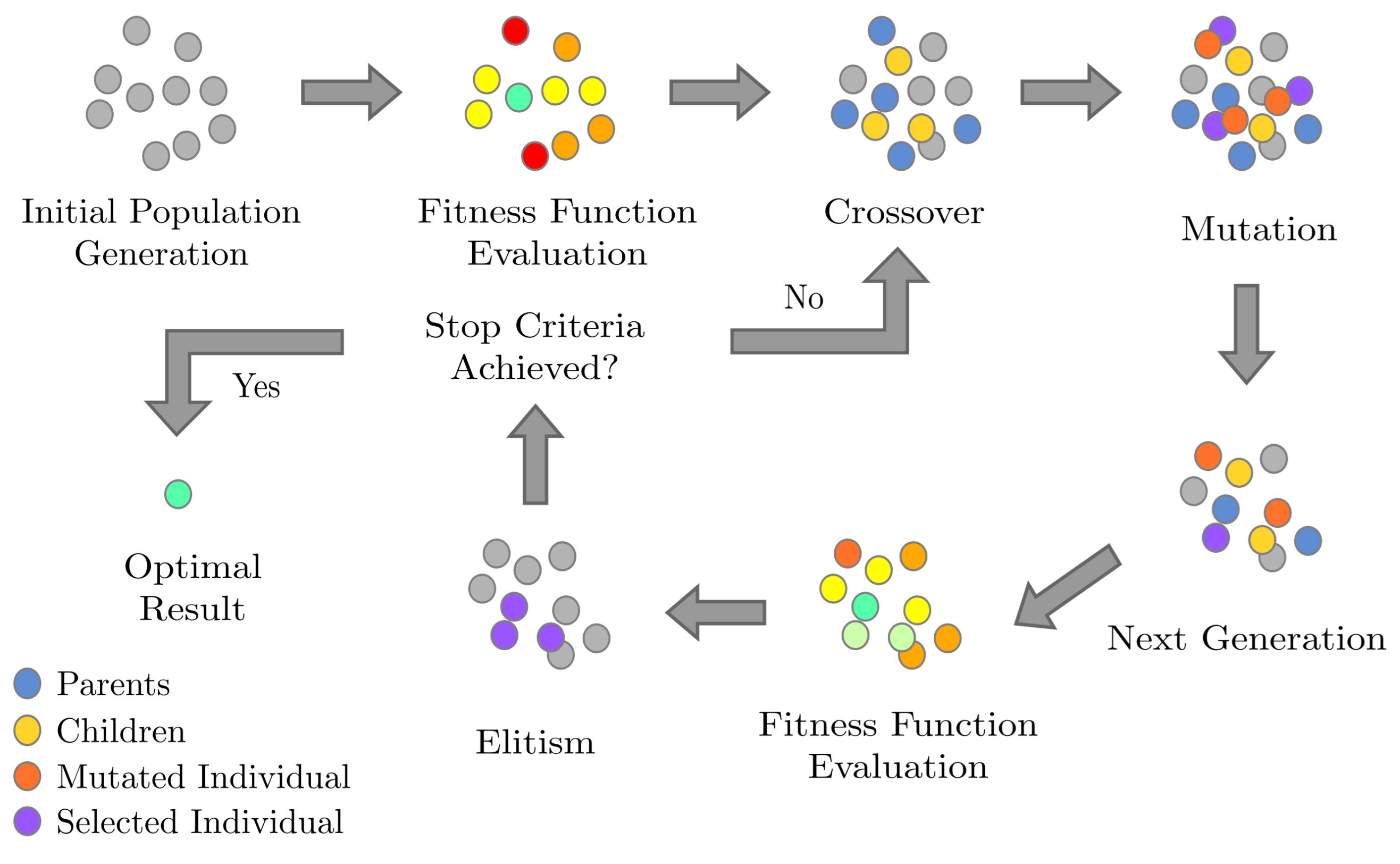
2.3.1. Genetic Algorithms
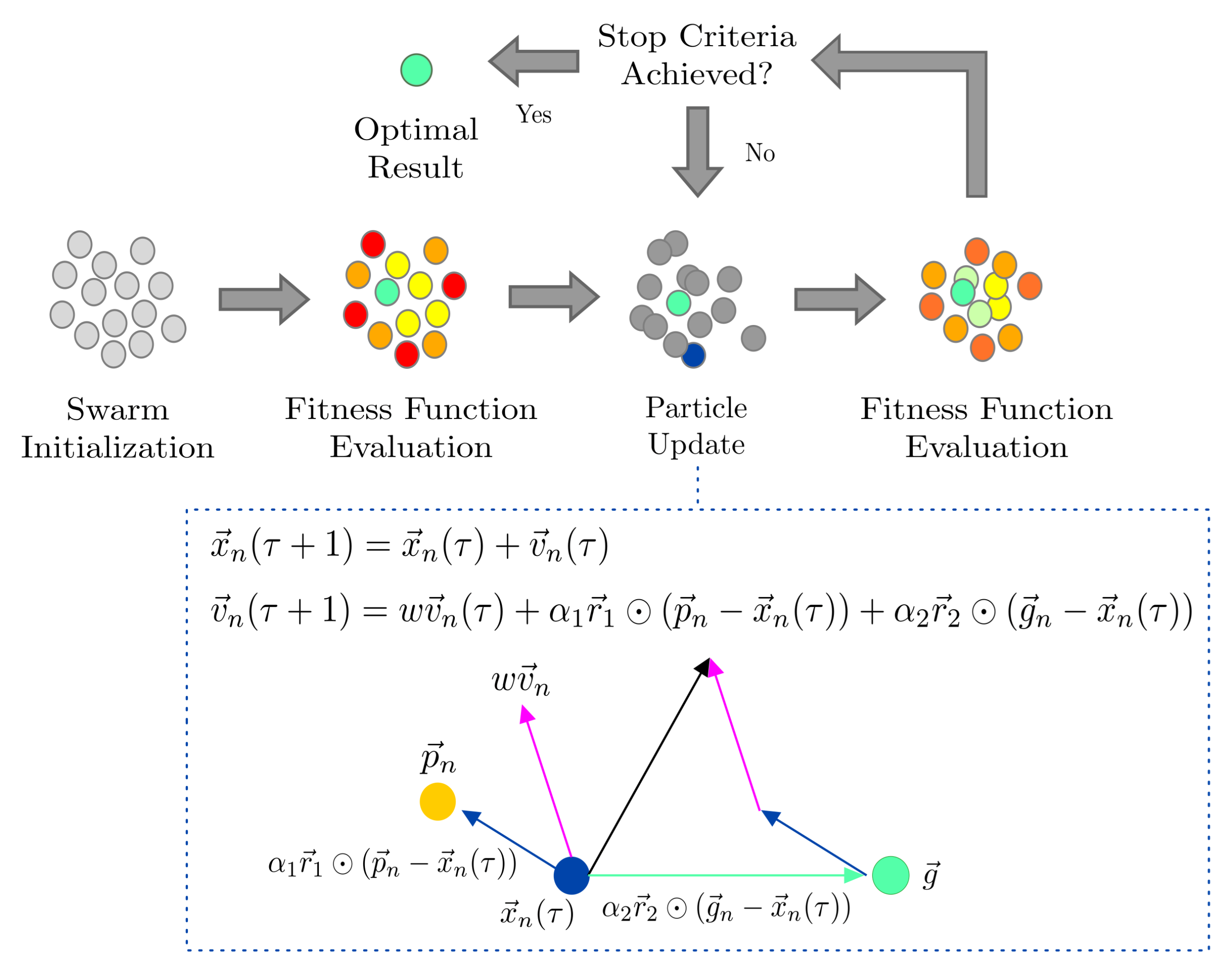
2.3.2. Particle Swarm Optimization
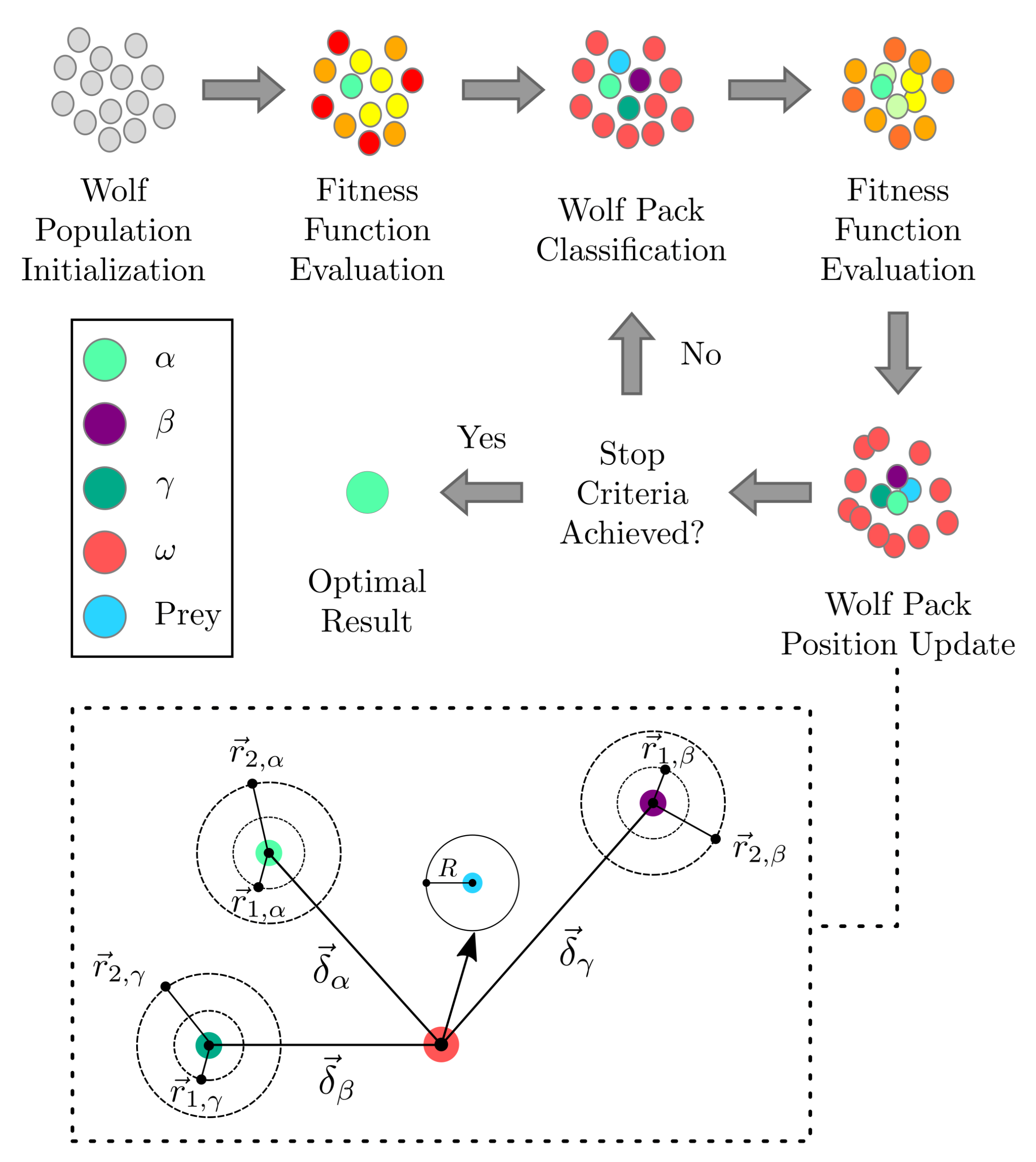
2.3.3. Gray Wolf Optimizer
2.4. Energy Quality
3. Our Proposed Approach
3.1. IBC Controller Optimization
3.2. MG Controller Optimization
3.3. Fitness Function
4. Methodology
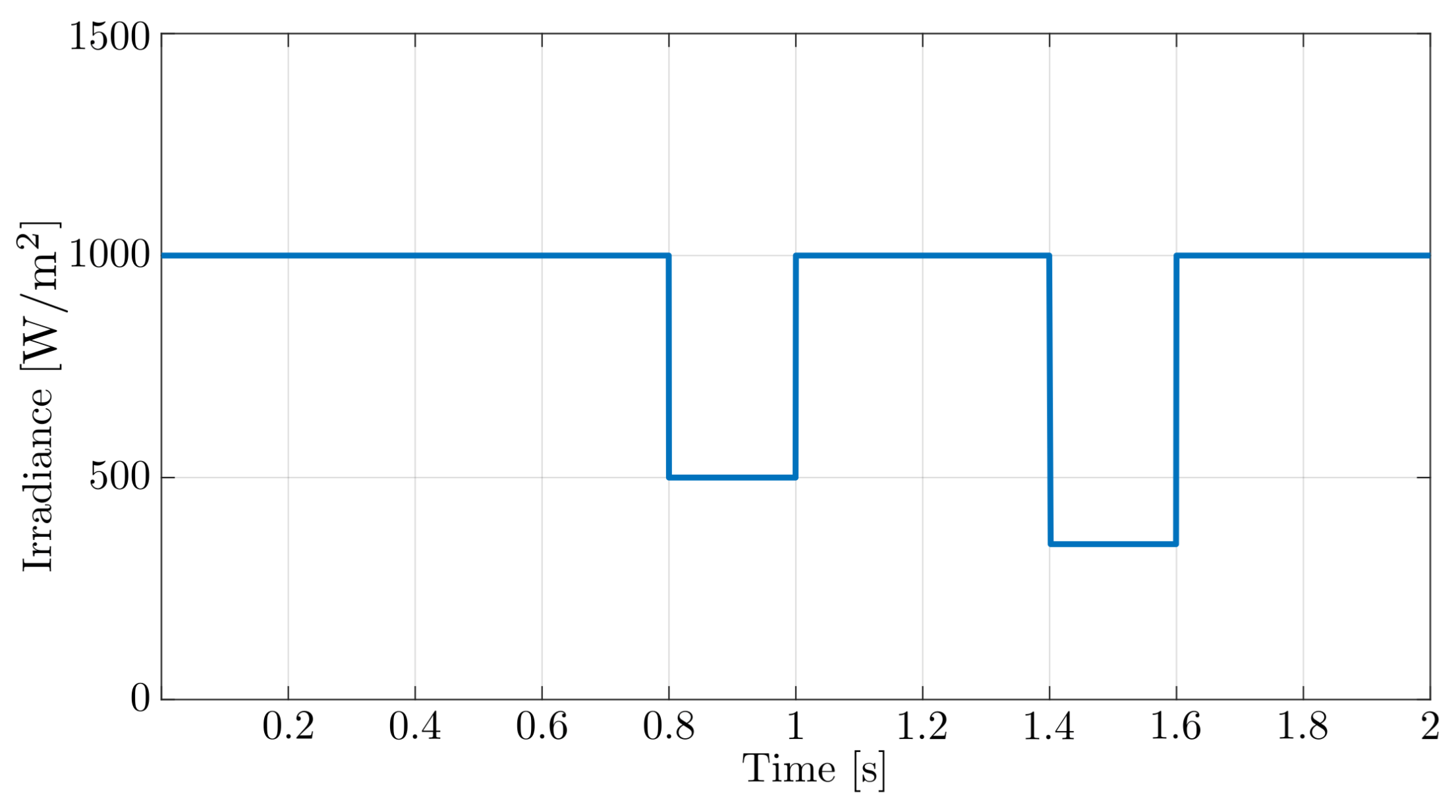
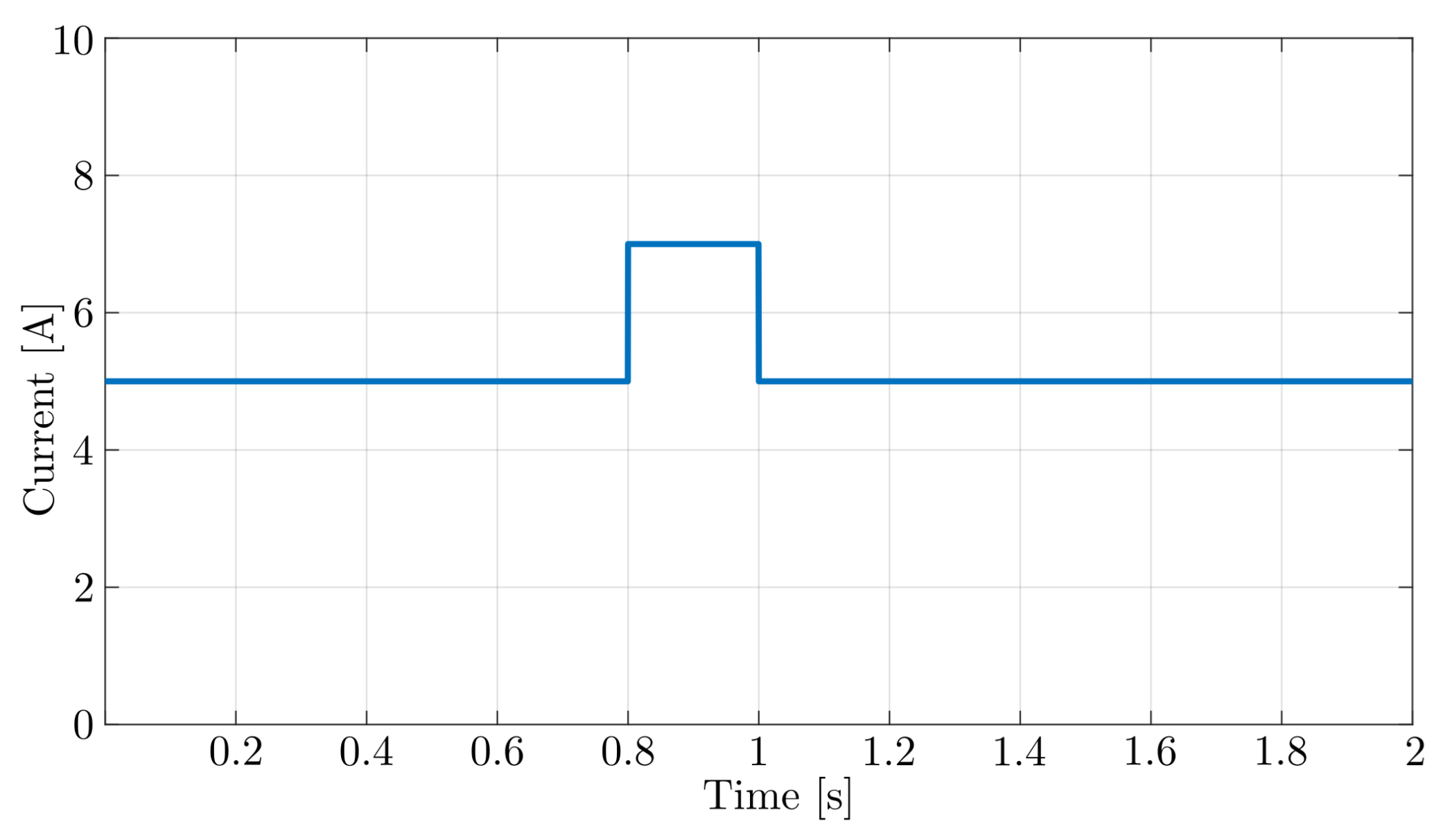
4.1. IBC Experiments
4.2. Experiments with the MG
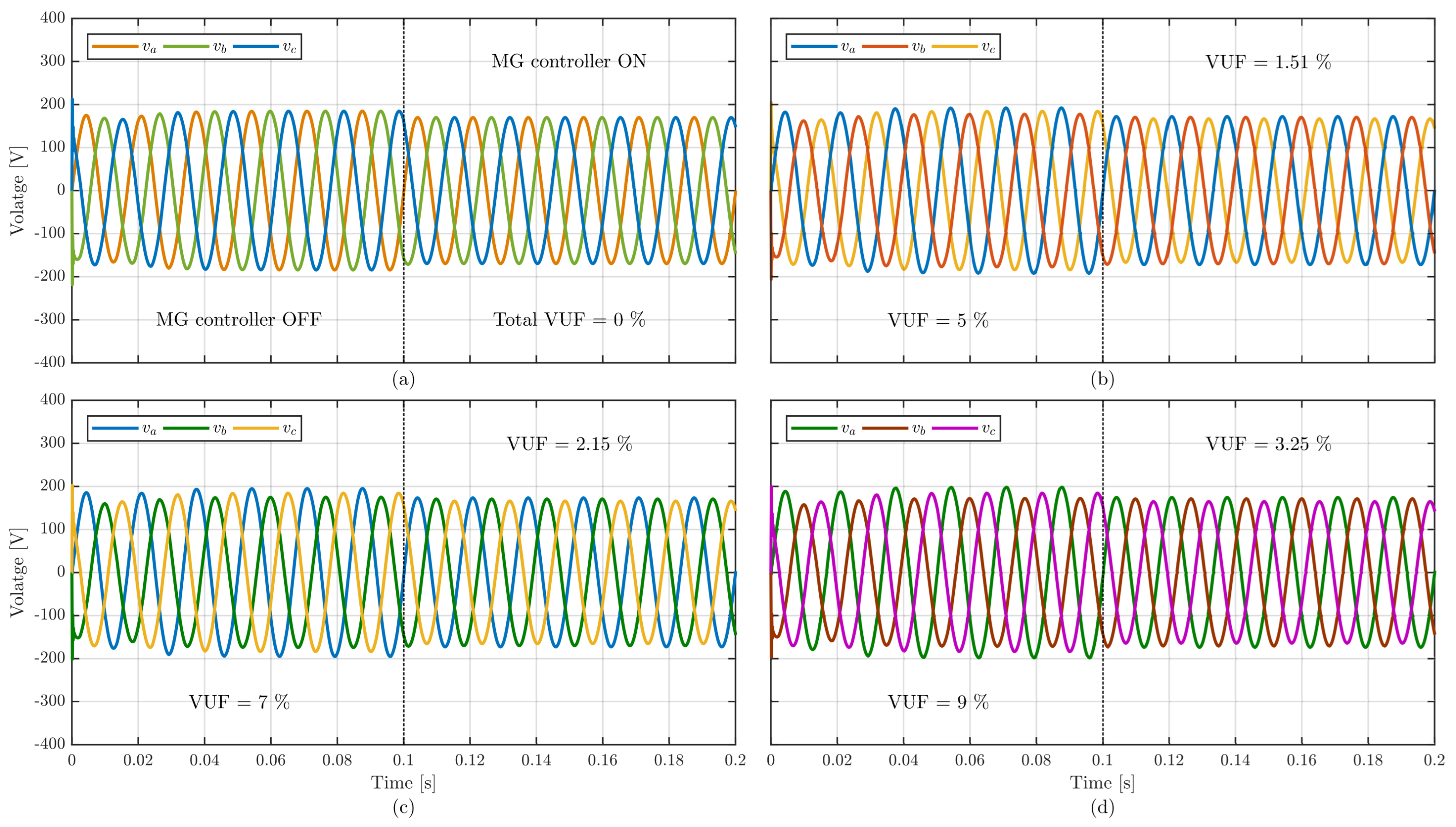
- The MG is loaded with different unbalanced voltages that come from distribution network failures, including negative sequence.
- The MG is faced with balanced nonlinear loads that exhibit harmonic contents.
- The MG is simultaneously connected to nonlinear loads and unbalanced voltages generated by the utility grid.
5. Simulation Results and Discussion
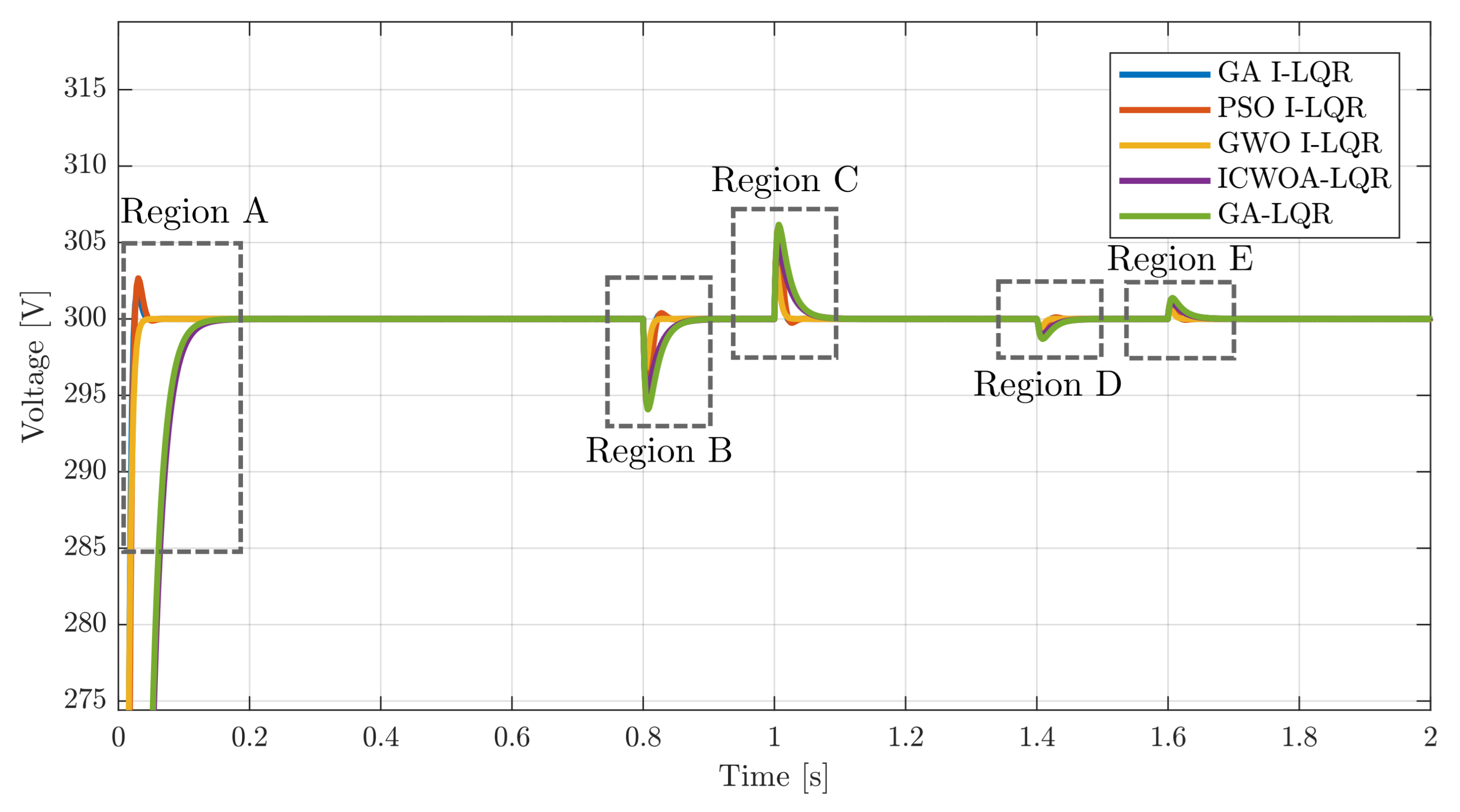
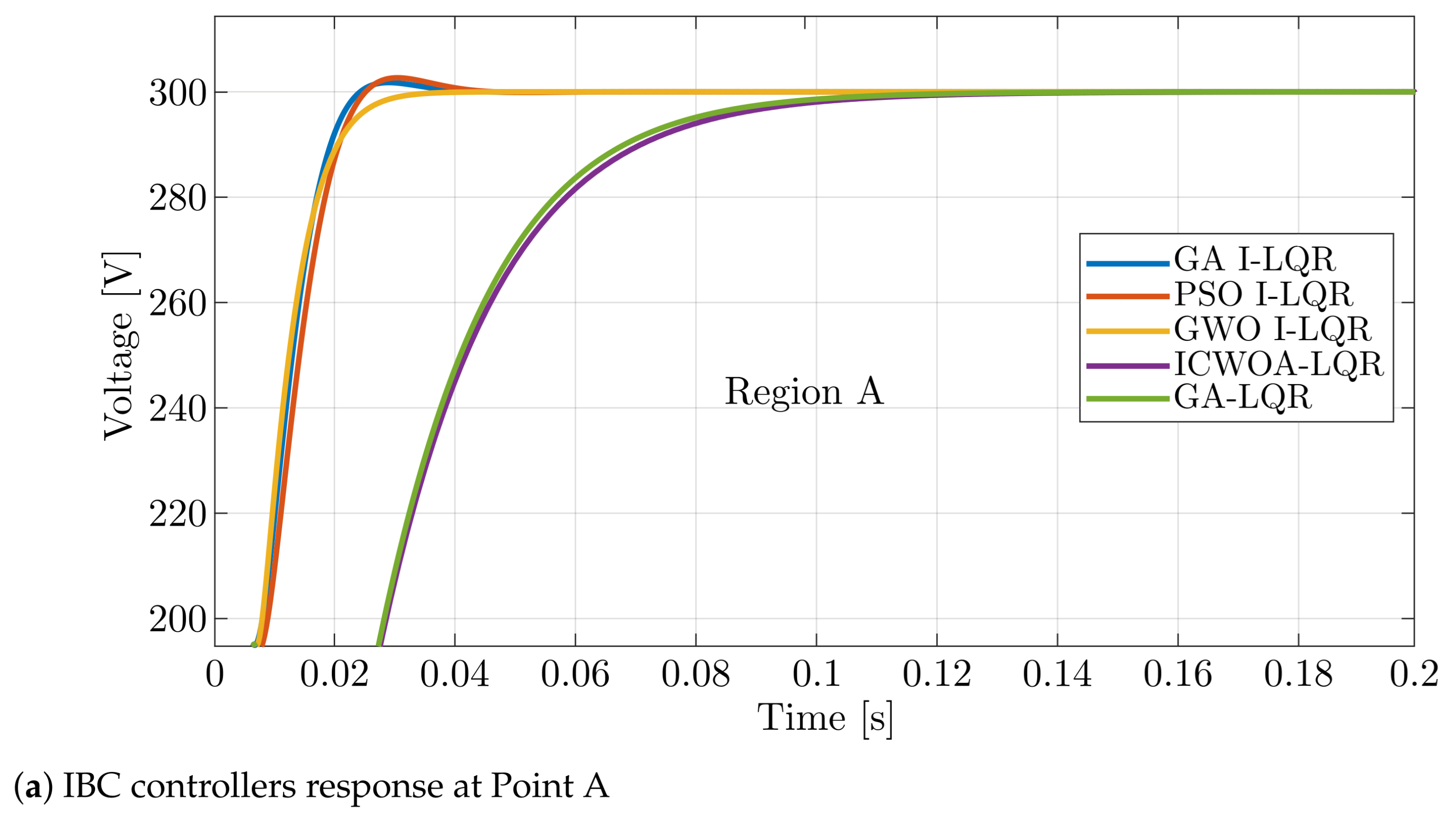
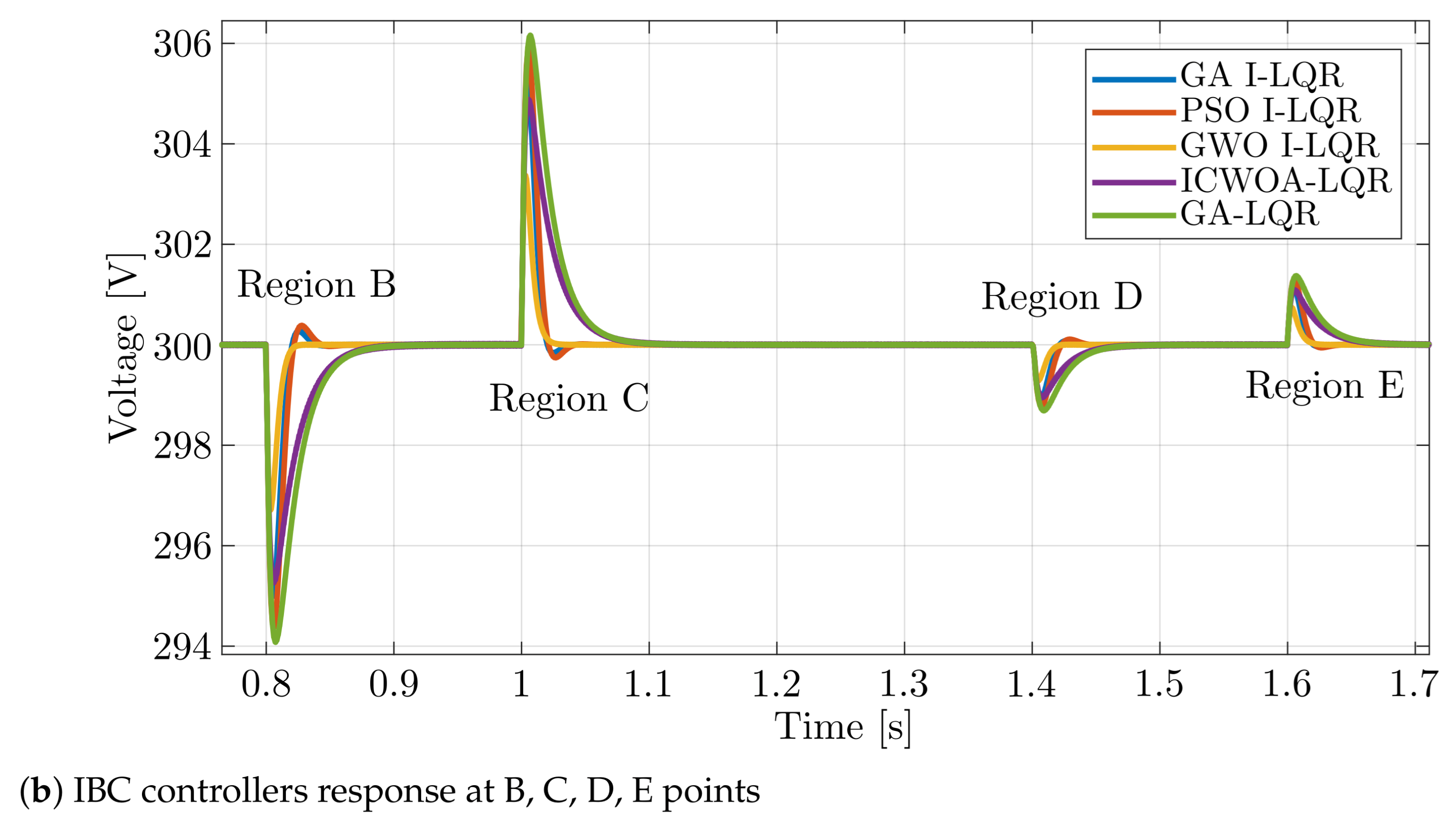
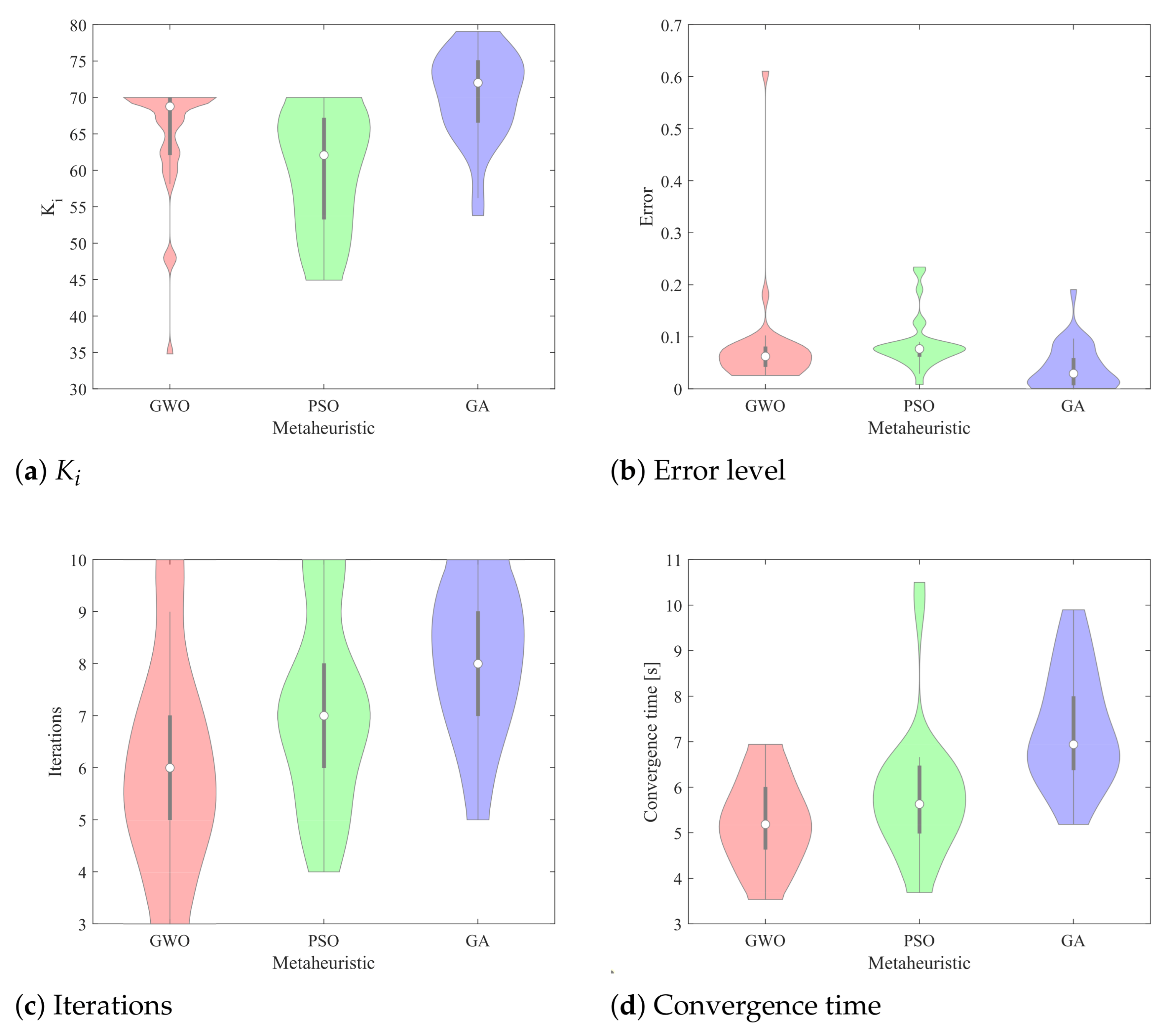
5.1. IBC Experiments
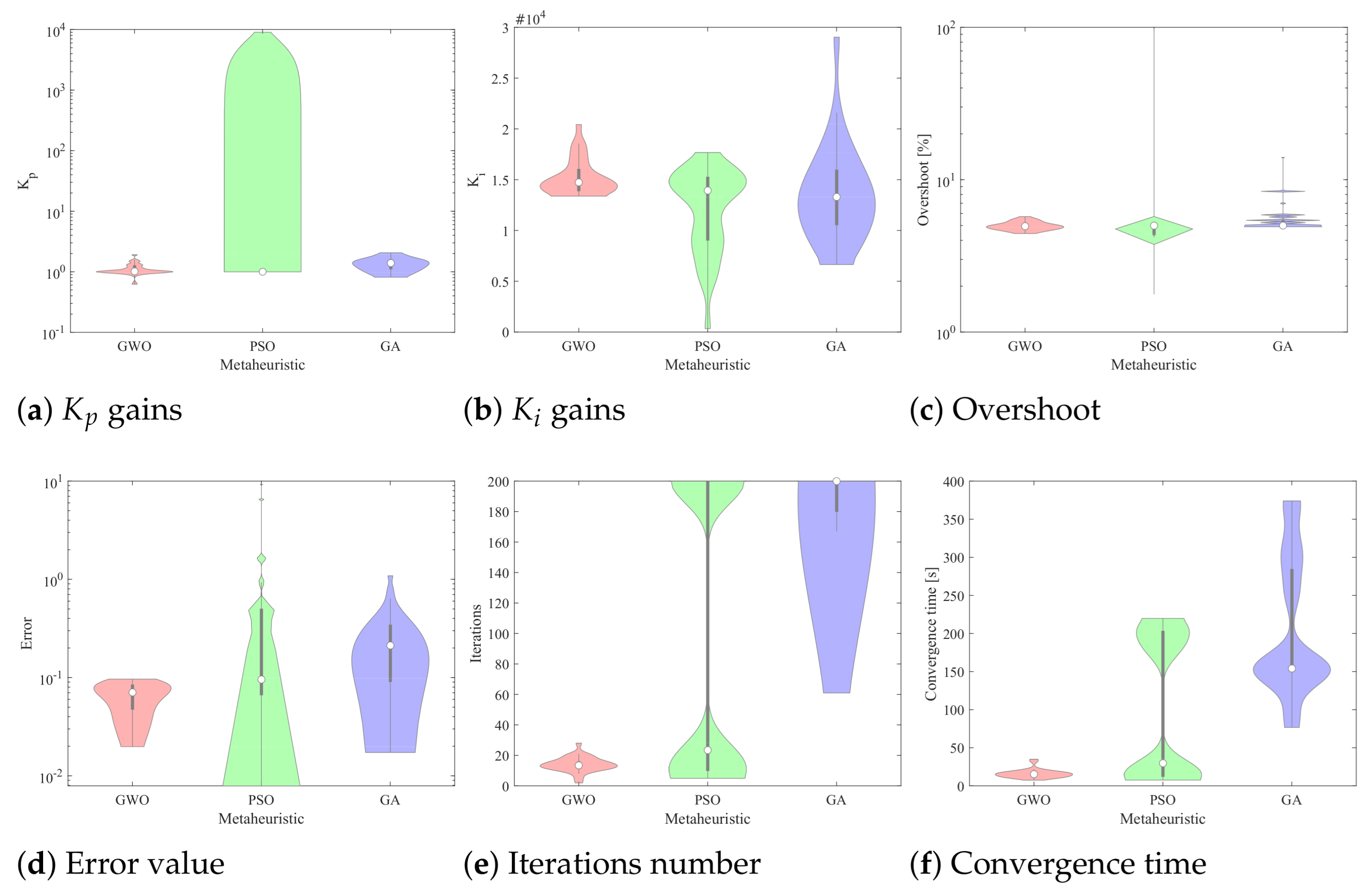
5.2. MG Experiments
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Hirsch, A.; Parag, Y.; Guerrero, J. Microgrids: A review of technologies, key drivers, and outstanding issues. Renew. Sustain. Energy Rev. 2018, 90, 402–411. [Google Scholar] [CrossRef]
- Wu, P.; Huang, W.; Tai, N.; Liang, S. A novel design of architecture and control for multiple microgrids with hybrid AC/DC connection. Appl. Energy 2018, 210, 1002–1016. [Google Scholar] [CrossRef]
- Sahoo, B.; Routray, S.; Rout, P. AC, DC, and hybrid control strategies for smart microgrid application: A review. Int. Trans. Electr. Energy Syst. 2021, 31, 1–53. [Google Scholar] [CrossRef]
- Cagnano, A.; De Tuglie, E.; Mancarella, P. Microgrids: Overview and guidelines for practical implementations and operation. Appl. Energy 2020, 258, 1–18. [Google Scholar] [CrossRef]
- Hoseinnia, S.; Akhbari, M.; Hamzeh, M.; Guerrero, J. A control scheme for voltage unbalance compensation in an islanded microgrid. Electr. Power Syst. Res. 2019, 177, 1–8. [Google Scholar] [CrossRef]
- IEEE Std 1159–2019. IEEE Recommended Practice for Monitoring Electric Power Quality; IEEE Standard; IEEE Power & Energy Society: New York, NY, USA, 2019. [Google Scholar]
- IEC 61000-4-7. Testing and Measurement Techniques—General Guide on Harmonics and Interharmonics Measurements and Instrumentation, for Power Supply Systems and Equipment Connected Thereto; IEEE Standard; International Electrotechnical Commission: Geneva, SW, USA, 2002. [Google Scholar]
- Ensermu, G.; Bhattacharya, A.; Panigrahy, N. Real-Time Simulation of Smart DC Microgrid with Decentralized Control System Under Source Disturbances. Arab. J. Sci. Eng. 2019, 44, 7173–7185. [Google Scholar] [CrossRef]
- Xiong, X.; Yang, Y. A photovoltaic-based DC microgrid system: Analysis, design and experimental results. Electronics 2020, 9, 941. [Google Scholar] [CrossRef]
- Habib, M.; Khoucha, F.; Harrag, A. GA-based robust LQR controller for interleaved boost DC–DC converter improving fuel cell voltage regulation. Electr. Power Syst. Res. 2017, 152, 438–456. [Google Scholar] [CrossRef]
- Huangfu, Y.; Zhuo, S.; Chen, F.; Pang, S.; Zhao, D.; Gao, F. Robust Voltage Control of Floating Interleaved Boost Converter for Fuel Cell Systems. IEEE Trans. Ind. Appl. 2018, 54, 665–674. [Google Scholar] [CrossRef]
- Reddy, K.J.; Sudhakar, N. High Voltage Gain Interleaved Boost Converter With Neural Network Based MPPT Controller for Fuel Cell Based Electric Vehicle Applications. IEEE Access 2018, 6, 3899–3908. [Google Scholar] [CrossRef]
- Buswig, Y.M.; Othman, A.; Julai, N.; Yi, S.S.; Utomo, W.M.; Siang, A.J.L.M. Voltage Tracking of a Multi-Input Interleaved Buck-Boost DC-DC Converter Using Artificial Neural Network Control. J. Telecommun. Electron. Comput. Eng. 2018, 10, 29–32. [Google Scholar]
- Ahmadi, S.; Abdi, S.; Kakavand, M. Maximum power point tracking of a proton exchange membrane fuel cell system using PSO-PID controller. Int. J. Hydrog. Energy 2017, 42, 20430–20443. [Google Scholar] [CrossRef]
- Habib, M.; Khoucha, F. An Improved LQR-based Controller for PEMFC Interleaved DC-DC Converter. Balk. J. Electr. Comput. Eng. 2015, 3, 30–35. [Google Scholar] [CrossRef] [Green Version]
- Banerjee, S.; Ghosh, A.; Rana, N. An Improved Interleaved Boost Converter With PSO-Based Optimal Type-III Controller. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 323–337. [Google Scholar] [CrossRef]
- Cao, Y.; Li, Y.; Zhang, G.; Jermsittiparsert, K.; Nasseri, M. An efficient terminal voltage control for PEMFC based on an improved version of whale optimization algorithm. Energy Rep. 2020, 6, 530–542. [Google Scholar] [CrossRef]
- Kim, K.; Kim, H.G.; Song, Y.; Paek, I. Design and simulation of an LQR-PI control algorithm for medium wind turbine. Energies 2019, 12, 2248. [Google Scholar] [CrossRef] [Green Version]
- Savaghebi, M.; Jalilian, A.; Vasquez, J.C.; Guerrero, J.M. Secondary control for voltage quality enhancement in microgrids. IEEE Trans. Smart Grid 2012, 3, 1893–1902. [Google Scholar] [CrossRef] [Green Version]
- Dasgupta, S.; Mohan, S.N.; Sahoo, S.K.; Panda, S.K. Lyapunov Function-Based Current Controller to Control Active and Reactive Power Flow From a Renewable Energy Source to a Generalized Three-Phase Microgrid System. IEEE Trans. Ind. Electron. 2013, 60, 799–813. [Google Scholar] [CrossRef]
- Lotfollahzade, M.; Akbarimajd, A.; Javidan, J. Design LQR and PID Controller for Optimal Load Sharing of an Electrical Microgrid. Int. Res. J. Appl. Basic Sci. 2013, 4, 704–712. [Google Scholar]
- Shi, H.; Zhuo, F.; Yi, H.; Geng, Z. Control strategy for microgrid under three-phase unbalance condition. J. Mod. Power Syst. Clean Energy 2016, 4, 94–102. [Google Scholar] [CrossRef] [Green Version]
- Mousavi, S.Y.M.; Jalilian, A.; Savaghebi, M.; Guerrero, J.M. Flexible compensation of voltage and current unbalance and harmonics in microgrids. Energies 2017, 10, 1568. [Google Scholar] [CrossRef]
- Hadidian, M.; Kalam, A.; Miveh, M.; Naderipour, A.; Gandoman, F.; Ghadimi, A.; Abdul-Malek, Z. Improved Voltage Unbalance and Harmonics Compensation Control Strategy Improved Voltage Unbalance and Harmonics Compensation Control Strategy for an Isolated Microgrid. Energies 2018, 11, 1–27. [Google Scholar]
- Beus, M.; Banis, F.; Pandžić, H.; Poulsen, N.K. Three-level hierarchical microgrid control—model development and laboratory implementation. Electr. Power Syst. Res. 2020, 189, 1–7. [Google Scholar] [CrossRef]
- Faria, J.; Fermeiro, J.; Pombo, J.; Calado, M.; Mariano, S. Proportional Resonant Current Control and Output-Filter Design Optimization for Grid-Tied Inverters Using Grey Wolf Optimizer. Energies 2020, 13, 1923. [Google Scholar] [CrossRef] [Green Version]
- Ebrahim, M.; Aziz, B.A.; Nashed, M.; Osman, F. Optimal design of proportional-resonant controller and its harmonic compensators for grid-integrated renewable energy sources based three-phase voltage source inverters. IET Gener. Transm. Distrib. 2021, 15, 1371–1386. [Google Scholar] [CrossRef]
- Nagarkar, M.P.; Bhalerao, Y.J.; Patil, G.J.V.; Patil, R.N.Z. Multi-Objective Optimization of Nonlinear Quarter Car Suspension System – PID and LQR Control. Procedia Manuf. 2018, 20, 420–427. [Google Scholar] [CrossRef]
- Lindiya, S.; Subashini, N.; Vijayarekha, K. Cross Regulation Reduced Optimal Multivariable Controller Design for Single Inductor DC-DC Converters. Energies 2019, 12, 477. [Google Scholar] [CrossRef] [Green Version]
- Şen, M.A.; Kalyoncu, M. Grey Wolf Optimizer Based Tuning of a Hybrid LQR-PID Controller for Foot Trajectory Control of a Quadruped Robot. Gazi Univ. J. Sci. 2019, 32, 674–684. [Google Scholar]
- Ibrahim, M.; Abdulla, A.I. Elevation, pitch and travel axis stabilization of 3DOF helicopter with hybrid control system by GA-LQR based PID controller. Int. J. Electr. Comput. Eng. 2020, 10, 1868–1884. [Google Scholar]
- Guilbert, D.; Guarisco, M.; Gaillard, A.; N’Diaye, A.; Djerdir, A. FPGA based fault-tolerant control on an interleaved DC/DC boost converter for fuel cell electric vehicle applications. Int. J. Hydrog. Energy 2015, 40, 15815–15822. [Google Scholar] [CrossRef]
- Wang, F.; Duarte, J.L.; Hendrix, M.A.M. Grid-Interfacing Converter Systems With Enhanced Voltage Quality for Microgrid Application—Concept and Implementation. IEEE Trans. Power Electron. 2011, 26, 3501–3513. [Google Scholar] [CrossRef]
- Verdugo, C.; Tarraso, A.; Candela, J.I.; Rocabert, J.; Rodriguez, P. Synchronous Frequency Support of Photovoltaic Power Plants with Inertia Emulation. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 4305–4310. [Google Scholar]
- Feng, Z.; Zhang, X.; Wang, J.; Yu, S. A High-Efficiency Three-Level ANPC Inverter Based on Hybrid SiC and Si Devices. Energies 2020, 5, 1159. [Google Scholar] [CrossRef] [Green Version]
- Gamit, R.; Vyas, R. Harmonic Elimination in Three Phase System By Means of a Shunt Active Filter. Int. Res. J. Eng. Technol. 2018, 5, 313–322. [Google Scholar]
- Alexander, C.; Sadiku, M.N.O. Fundamentals of Electric Circuits, 5th ed.; McGrawHill: New York, NY, USA, 2013; p. 995. [Google Scholar]
- Escudero, R.; Noel, J.; Elizondo, J.; Kirtley, J. Microgrid fault detection based on wavelet transformation and Park’s vector approach. Electr. Power Syst. Res. 2017, 152, 401–410. [Google Scholar] [CrossRef]
- Halim, A.H.; Ismail, I.; Das, S. Performance assessment of the metaheuristic optimization algorithms: An exhaustive review. Artif. Intell. Rev. 2020, 54, 2323–2409. [Google Scholar] [CrossRef]
- Lambora, A.; Gupta, K.; Chopra, K. Genetic algorithm-A literature review. In Proceedings of the 2019 International Conference on Machine Learning, Big Data, Cloud and Parallel Computing (COMITCon), Faridabad, India, 14–16 February 2019; pp. 380–384. [Google Scholar]
- Abdel-Basset, M.; Abdel-Fatah, L.; Sangaiah, A.K. Chapter 10—Metaheuristic Algorithms: A Comprehensive Review. In Computational Intelligence for Multimedia Big Data on the Cloud with Engineering Applications; Sangaiah, A.K., Sheng, M., Zhang, Z., Eds.; Intelligent Data-Centric Systems; Academic Press: Cambridge, MA, USA, 2018; pp. 185–231. [Google Scholar]
- Sotoudeh-Anvari, A.; Hafezalkotob, A. A bibliography of metaheuristics-review from 2009 to 2015. Int. J. Knowl. Based Intell. Eng. Syst. 2018, 22, 83–95. [Google Scholar] [CrossRef]
- Sörensen, K. Metaheuristics-the metaphor exposed. Int. Trans. Oper. Res. 2015, 22, 3–18. [Google Scholar] [CrossRef]
- Cruz-Duarte, J.M.; Ortiz-Bayliss, J.C.; Amaya, I.; Shi, Y.; Terashima-Marín, H.; Pillay, N. Towards a generalised metaheuristic model for continuous optimisation problems. Mathematics 2020, 8, 2046. [Google Scholar] [CrossRef]
- Roetzel, W.; Luo, X.; Chen, D. Chapter 6—Optimal design of heat exchanger networks. In Design and Operation of Heat Exchangers and Their Networks; Academic Press: Cambridge, MA, USA, 2020; pp. 231–317. [Google Scholar]
- Robandi, I.; Nishimori, K.; Nishimura, R.; Ishihara, N. Optimal feedback control design using genetic algorithm in multimachine power system. Int. J. Electr. Power Energy Syst. 2001, 23, 263–271. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar] [CrossRef]
- Sahab, M.G.; Toropov, V.V.; Gandomi, A.H. 2—A Review on Traditional and Modern Structural Optimization: Problems and Techniques. In Metaheuristic Applications in Structures and Infrastructures; Gandomi, A.H., Yang, X.S., Talatahari, S., Alavi, A.H., Eds.; Elsevier: Amsterdam, The Netherlands, 2013; pp. 25–47. [Google Scholar]
- de Almeida, B.S.G.; Leite, V.C. Particle Swarm Optimization: A Powerful Technique for Solving Engineering Problems. In Swarm Intelligence—Recent Advances, New Perspectives and Applications; IntechOpen: London, UK, 2019; pp. 1–21. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Mazin, H.E.; Xu, W. Harmonic cancellation characteristics of specially connected transformers. Electr. Power Syst. Res. 2009, 79, 1689–1697. [Google Scholar] [CrossRef]
- Fadali, M.S.; Visioli, A. Chapter 9—State Feedback Control. In Digital Control Engineering, 2nd ed.; Fadali, M.S., Visioli, A., Eds.; Academic Press: Cambridge, MA, USA, 2013; pp. 351–397. [Google Scholar]
- Dean, S.; Mania, H.; Matni, N.; Recht, B.; Tu, S. On the Sample Complexity of the Linear Quadratic Regulator. Found. Comput. Math. 2020, 20, 633–679. [Google Scholar] [CrossRef] [Green Version]
- Reyes-Lúa, A.; Skogestad, S. Multiple-input single-output control for extending the steady-state operating range-use of controllers with different setpoints. Processes 2019, 7, 941. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inputs | Outputs | ||||||
|---|---|---|---|---|---|---|---|
| 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1 | 0 | 0 | 1 | 0 | 0 | ||
| 0 | 1 | 1 | 0 | 0 | 0 | ||
| 0 | 0 | 1 | 1 | ||||
| PV Array | |
|---|---|
| Module | SunPower |
| SPR-X20-250-BLK | |
| Maximum Power | 249.952 W |
| Open circuit voltage () | 50.93 V |
| Voltage at maximum power point () | 42.8 V |
| Temperature coefficient of | −0.35602%/°C |
| Cells per module | 72 |
| Short-circuit current () | 6.2 A |
| Current at maximum power point | 5.84 A |
| Temperature coefficient of | 0.07%/°C |
| Temperature | 25 °C |
| IBC | |
| Resistance (R) | 50 |
| Inductors () | 5 mH |
| Capacitor () | 1 mF |
| PV array input voltage | 150 V |
| Switching frequency | 10 kHz |
| Voltage set-point | 300 V |
| Parameters | IBC Controller | MG Controller | ||||
|---|---|---|---|---|---|---|
| GA | PSO | GWO | GA | PSO | GWO | |
| Population size (N) | 10 | 10 | 10 | 100 | 100 | 100 |
| Max. iterations () | 10 | 10 | 10 | 200 | 200 | 200 |
| Elitism ratio | 0.20 | – | – | 0.05 | – | – |
| Crossover ratio | 0.60 | – | – | 0.75 | – | – |
| Mutation ratio | 0.20 | – | – | 0.20 | – | – |
| Inertia factor (w) | – | 0.50 | – | – | 0.50 | – |
| Confidence coef. () | – | 0.50 | – | – | 0.50 | – |
| Swarm coef. () | – | 0.50 | – | – | 0.50 | – |
| MG voltage | 300 V |
| Converter switching frequency | 10 kHz |
| Grid voltage | 120 |
| Grid frequency | 60 Hz |
| Distribution impedance line | 0.64 + 0.0377i |
| Filter inductance | 12 mH |
| Filter capacitance | 16 F |
| Three-phase load | 20 |
| Three-phase nonlinear load capacitance | 2 mF |
| Three-phase nonlinear load resistance | 10 |
| Approach | Iter. | [s] | Error | , , | |
|---|---|---|---|---|---|
| GA | 9 | 0.0486 | 0.0486 | 1.5168, 0.1220, 0.5358 | 67.6403 |
| PSO | 8 | 0.0514 | 0.0714 | 4.6516, 0.3066, 1.3903 | 63.0782 |
| GWO | 5 | 0.0556 | 0.0644 | 1.8119, 0.3056, 1.2533 | 70 |
| Habib et al. [10] | 10 | 0.1410 | 1.0666 | 1.4259, 0.1127, 0.5056 | 27.2183 |
| Cao et al. [17] | 500 | 0.1781 | 1.4788 | 1.1935, 0.1165, 0.4963 | 25.7612 |
| 0.1290, 1.0120, 0.5645 | 29.2894 |
| Performance Metric | Controller | Value in Region of Interest | |||||
|---|---|---|---|---|---|---|---|
| A | B | C | D | E | Avg. Value | ||
| Maximum overshoot [%] | GA I-LQR | 0.50 | 0.01 | 1.74 | 0.25 | 0.38 | 0.57 |
| PSO I-LQR | 0.88↓ | 0.12↓ | 1.96↓ | 0.37↓ | 0.43↓ | 0.75↓ | |
| GWO I-LQR | 0↑ | 0↑ | 1.11↑ | 0↑ | 0.25↑ | 0.27↑ | |
| Cao et al. [17] | 0 | 0 | 1.74 | 0 | 0.38 | 0.42 | |
| Habib et al. [10] | 0 | 0 | 2.24 | 0 | 0.51 | 0.55 | |
| Response time [ms] | GA I-LQR | 60 | 40 | 40 | 40 | 35 | 43 |
| PSO I-LQR | 70 | 60 | 45 | 50 | 50 | 55 | |
| GWO I-LQR | 50↑ | 30↑ | 30↑ | 25↑ | 30↑ | 33↑ | |
| Cao et al. [17] | 170↓ | 100↓ | 100↓ | 100↓ | 100↓ | 114↓ | |
| Habib et al. [10] | 140 | 90 | 100 | 70 | 80 | 96 | |
| Ripple [mV] | GA I-LQR | 3.30 | 3.90 | 3.30 | 3.40 | 3.20 | 3.40 |
| PSO I-LQR | 12.80 | 1.80↑ | 1.30↑ | 1.30↑ | 1.30↑ | 3.70 | |
| GWO I-LQR | 3.00↑ | 3.50 | 3.00 | 3.10 | 2.90 | 3.10↑ | |
| Cao et al. [17] | 20.00↓ | 34.50↓ | 20.50↓ | 23.50↓ | 20.50↓ | 23.80↓ | |
| Habib et al. [10] | 12.00 | 16.00 | 13.00 | 12.00 | 12.00 | 13.00 | |
| Method | Iter. | [ms] | [%] | Error | , | ||
|---|---|---|---|---|---|---|---|
| GA | 61 | 0.3579 | 5.0276 | 0.0529 | 317.9907, 66.0267 | 1.4178 | 13,813.8517 |
| PSO | 5 | 0.3367 | 5 | 0.0266 | 360.2644, 86.5263 | 1 | 15,030.9159 |
| GWO | 19 | 0.3321 | 4.9122 | 0.0198 | 369.4960, 89.4125 | 1 | 15,265.7446 |
| Balanced Nonlinear Loads | Unbalanced Linear and Nonlinear Conditions | ||||
|---|---|---|---|---|---|
| MG Harmonics (Original) | MG Harmonics (Compensated) | MG Harmonics (Original) | MG Harmonics (Compensated) | ||
| Phase | , , | , , | , , | , , | |
| Order | Third (3rd) | 1.97, 1.97, 1.97 | 0.00↓, 0.00↓, 0.00↓ | 0.52, 3.52, 3.86 | 0.29↓, 0.33↓, 0.51↓ |
| Fifth (5th) | 3.95, 3.95, 3.95 | 4.63↑, 4.63↑, 4.63↑ | 3.41, 4.18, 4.80 | 3.77↑, 4.18, 4.80 | |
| Seventh (7th) | 2.16, 2.16, 2.16 | 2.75↑, 2.75↑, 2.75↑ | 2.69, 0.98, 1.91 | 2.36↓, 2.76↑, 0.87↓ | |
| Ninth (9th) | 0.18, 0.18, 0.18 | 0.00↓, 0.00↓, 0.00↓ | 0.23, 0.58, 0.56 | 0.44↑, 0.45↓, 0.07↓ | |
| Eleventh (11th) | 0.86, 0.86, 0.86 | 0.77↓, 0.77↓, 0.77↓ | 0.47, 1.45, 0.77 | 0.31↓, 0.94↓, 1.02↑ | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Valencia-Rivera, G.H.; Amaya, I.; Cruz-Duarte, J.M.; Ortíz-Bayliss, J.C.; Avina-Cervantes, J.G. Hybrid Controller Based on LQR Applied to Interleaved Boost Converter and Microgrids under Power Quality Events. Energies 2021, 14, 6909. https://doi.org/10.3390/en14216909
Valencia-Rivera GH, Amaya I, Cruz-Duarte JM, Ortíz-Bayliss JC, Avina-Cervantes JG. Hybrid Controller Based on LQR Applied to Interleaved Boost Converter and Microgrids under Power Quality Events. Energies. 2021; 14(21):6909. https://doi.org/10.3390/en14216909
Chicago/Turabian StyleValencia-Rivera, Gerardo Humberto, Ivan Amaya, Jorge M. Cruz-Duarte, José Carlos Ortíz-Bayliss, and Juan Gabriel Avina-Cervantes. 2021. "Hybrid Controller Based on LQR Applied to Interleaved Boost Converter and Microgrids under Power Quality Events" Energies 14, no. 21: 6909. https://doi.org/10.3390/en14216909
APA StyleValencia-Rivera, G. H., Amaya, I., Cruz-Duarte, J. M., Ortíz-Bayliss, J. C., & Avina-Cervantes, J. G. (2021). Hybrid Controller Based on LQR Applied to Interleaved Boost Converter and Microgrids under Power Quality Events. Energies, 14(21), 6909. https://doi.org/10.3390/en14216909