4.3. Evaluation of the Failure Rate of the Main Seal
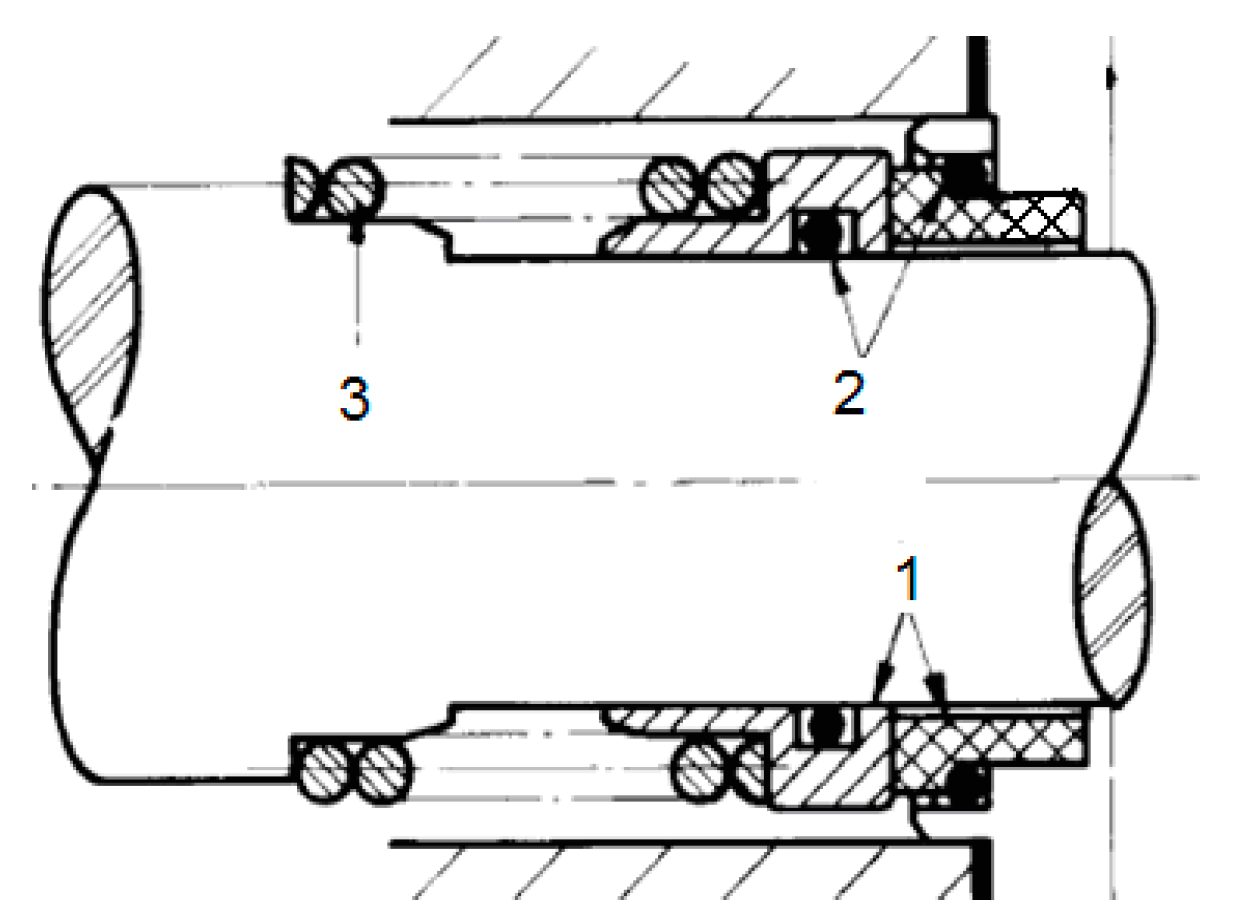
A rotating shaft seal is installed on the low-speed shaft to prevent leakage of seawater into the turbine nacelle (or the gearbox if the drive train is not enclosed in a nacelle). It is assumed that a mechanical face seal is used for this purpose. The main groups of parts of this type of seal are shown in
Figure 6. In accordance with the dimensions of the low-speed shaft, the balance (or sliding) diameter of the seal is 220 mm. The inside and outside diameters of the sealing surface are 221.6 mm and 229.6 mm, respectively. The seal face material combination is carbon/silicon carbide, which demonstrated excellent performance in seawater applications (e.g., [
31]).
In principle, the operating life of a mechanical face seal should be controlled by wear out of the seal face. However, a relatively small proportion of mechanical seals fail due to wear [
32]. Apart from excessive wear, other common modes of seal failure are separation of faces, fatigue-like surface embrittlement, thermal-stress cracking, abrasive removal of surface material and corrosion. The reliable performance of a mechanical face seal mainly depends on the conditions at the seal interface, particularly on the lubrication regime between the seal faces. Most mechanical seals operate under a mixed lubrication regime when the load between the seal faces is carried partly by fluid pressure and partly by mechanical contact (e.g., [
33]). Thus, the parameters which affect the operating life and failures of mechanical seals include pressure, sliding velocity and temperature at the seal interface, surface finish of seal faces, properties of the surrounding fluid and its contamination.
Thus, the failure rate of a mechanical face seal,
λS, Equation (3) can be calculated as [
10]:
where
λS,B is the base failure rate,
CQ the influence factor for allowable leakage,
CF the influence factor for surface finish,
Cν the influence factor for fluid viscosity,
CT the influence factor for seal face temperature,
CN the influence factor for contamination,
CPV the influence factor for the pressure-velocity (PV) parameter, and
CM takes into account the model uncertainty.
The base failure rate is estimated using results of 274 tests presented in [
32]. Seals in the tests were made of carbon graphite and tungsten carbide and operated in water; the water temperature was not reported. Statistical analysis of the test results yielded the mean of 46.9 failures per million hours (pmh) and standard deviation of 23.3 pmh. The average PV parameter in the tests was 6.9 MPa∙m/s. In absence of more detailed information, it is assumed that the variability of the base failure rate can be described by a lognormal distribution.
According to [
10],
CQ = 4.2 −
Qf, where
Qf is the allowable leakage rate under conditions of usage. Since the leakage should not be allowed
Qf ≈ 0 so that
CQ = 4.2. For the material combination carbon/silicon carbide typical surface finish in RMS is 0.125 μm [
32]. Thus, according to [
10],
CF = 1. The tests results used to estimate
λS,B were obtained for seals operating in water, while the seal in the HATT operates in seawater. The influence factor for viscosity is
Cν =
νw/
νsw [
10], where
νw and
νsw are the dynamic viscosities of water and seawater, respectively. The viscosity of seawater is slightly higher than that of water, e.g., for
T = 10 °C
νw = 1.27 × 10
−3 Pa∙s and
νsw = 1.38 × 10
−3 Pa∙s. Since
Cv should be slightly less than unity in the following analysis it is conservatively assumed that
Cν = 1.
As noted above, no information about the temperature was provided for the test results. Since values of the pressure and sliding velocity at the seal interface were much higher in the tests than in the seal under consideration, it is expected that the temperatures in the tests were also higher. This means that
CT should be less than unity [
10]; because of the lack of more concrete data, it is conservatively assumed that
CT = 1.
Seawater around the seal may contain abrasive solid particles like sand; therefore, the seal environment is characterised as rather harsh. Due to a lack of reliable data on actual contamination of the seal environment,
CN is treated as a random variable, which can take values between 1 and its upper bound 4 for a harsh environment [
10]. It is assumed that
CN is modelled as a beta random variable defined on (1, 4) with mean 3.5 and coefficient of variation (COV) 0.10.
The influence factor for the PV parameter is determined as
CPV =
PVOP/
PVB [
10], where
PVOP and
PVB are the PV parameters for actual seal operation and for the base case operation, respectively. According to the information on the tests, which results were employed to determine
λS,B, PVB = 6.9 MPa∙m/s.
PVOP can be estimated based on the net face pressure as [
32]:
where Δ
p is the pressure differential across the seal,
B the balance ratio (=1.2 [
33]),
K the pressure gradient factor (=0.5),
ps the pressure at the seal interface due to the spring (= 0.2 MPa), and
V the sliding velocity at the seal face (= 0.33 m/s for the rotor rotational speed of 14 rpm). The pressure inside the nacelle is assumed to be atmospheric. Hence, since the average water depth at the rotor hub level is 15 m, the mean Δ
p is around 0.15 MPa. However, Δ
p fluctuates due to the water level variations caused by tides and waves and effects of water flow. It is estimated that these fluctuations can result in changes of Δ
p within ±0.035 MPa. Thus, Δ
p is presented as the sum of its mean value (= 0.15 MPa) and a beta random variable
δp defined on (−0.035, 0.035) with zero mean and standard deviation 0.0105, i.e., Δ
p = 0.15 +
δp (MPa).
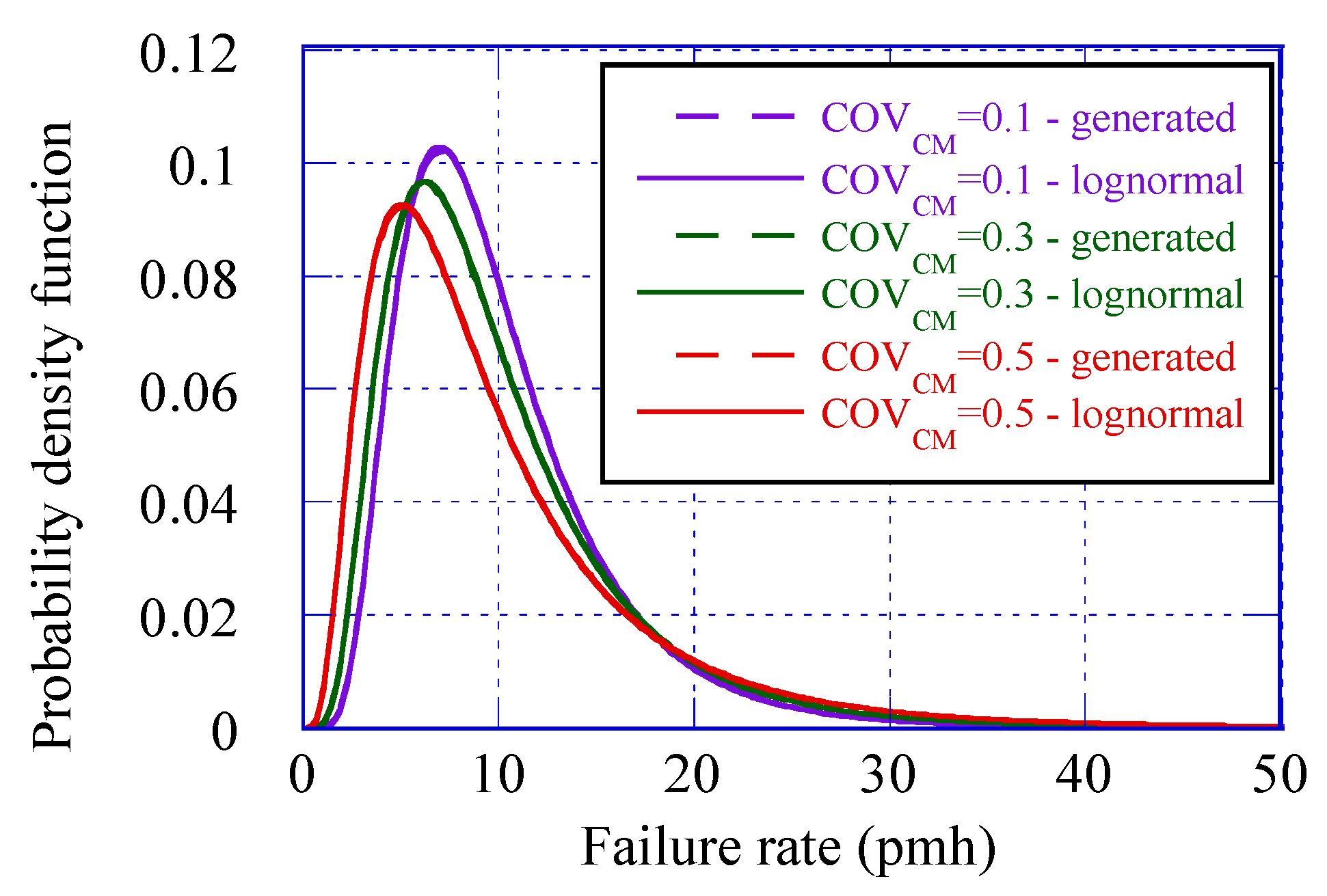
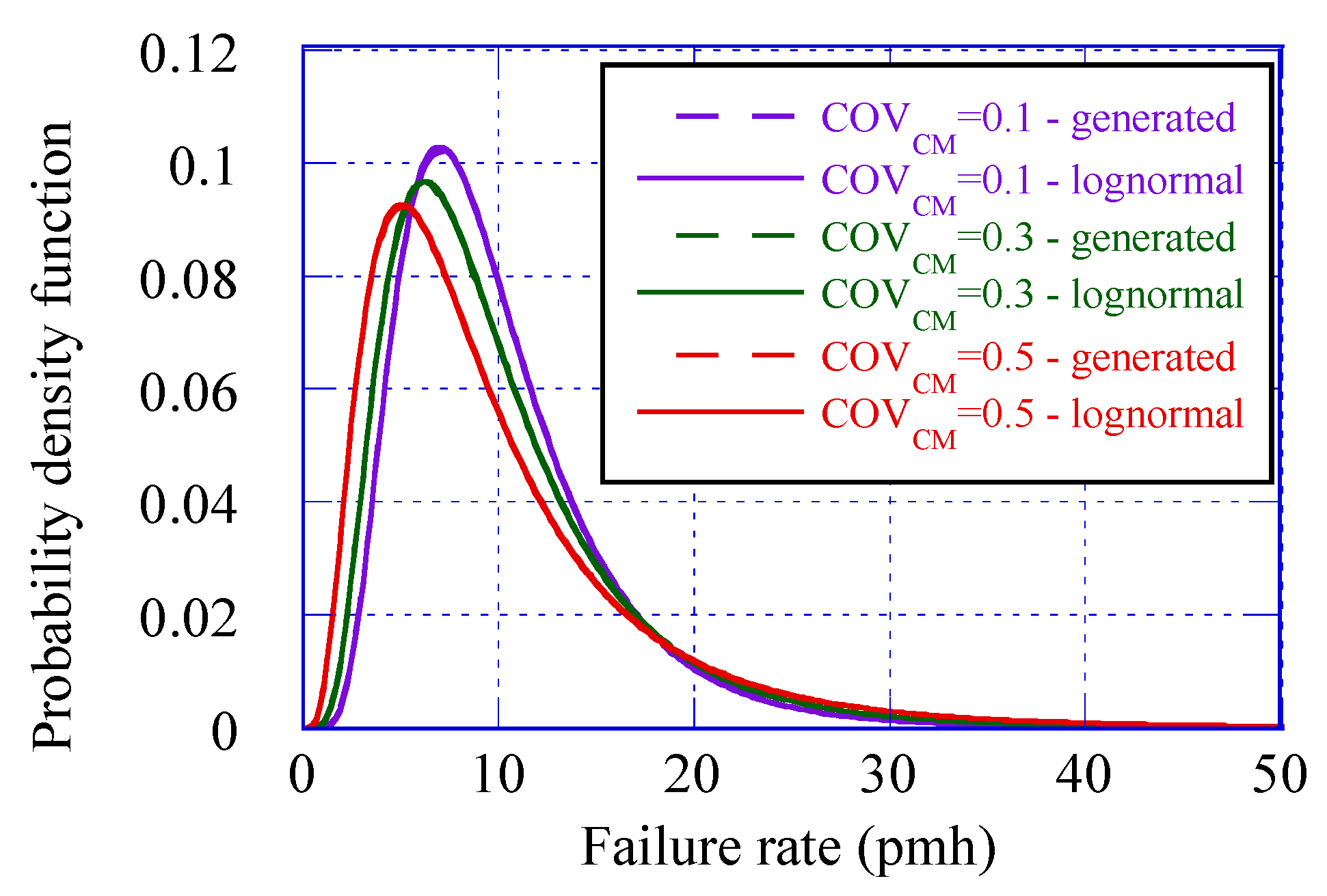
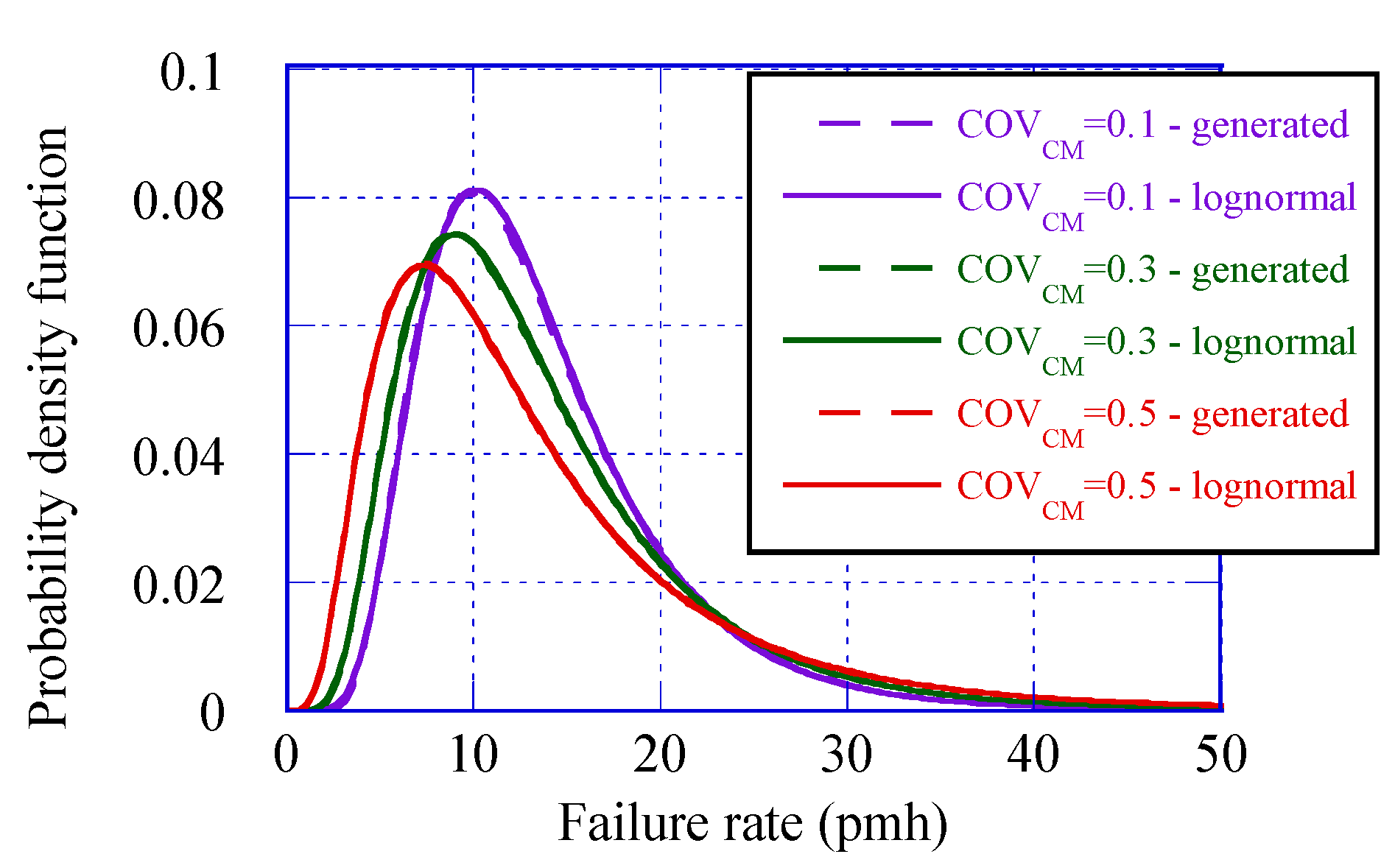
As explained previously, CM represents the model uncertainty or, in other words, various uncertainties associated with the method of the influence factors, i.e., Equation (11) for the seal. The latter equation is used to construct a prior distribution of the failure rate so that CM can also be used to represent the degree of belief in this prior. In the following, CM will be treated as a lognormal random variable with a mean of unity. Three values of its COV, denoted further as COVCM, representing different degrees of belief will be considered: 0.1—strong belief, 0.3—medium belief, and 0.5—weak belief. Since a lognormal distribution is skewed to the right its choice for CM also means that results obtained by the proposed method will tend to overestimate the failure rate, i.e., to be on a conservative side.
Initially, as explained previously, a prior distribution of the failure rate of the seal is obtained by generating values of the random variables described above and substituting them into Equation (11). This is done using Monte Carlo simulation. The generated prior distribution of the failure rate is then approximated by a lognormal distribution; since the failure rate is the product of several random variables (see Equation (11)) it is expected, in accordance with the central limit theorem (e.g., [
9]), that its distribution approaches a lognormal distribution.
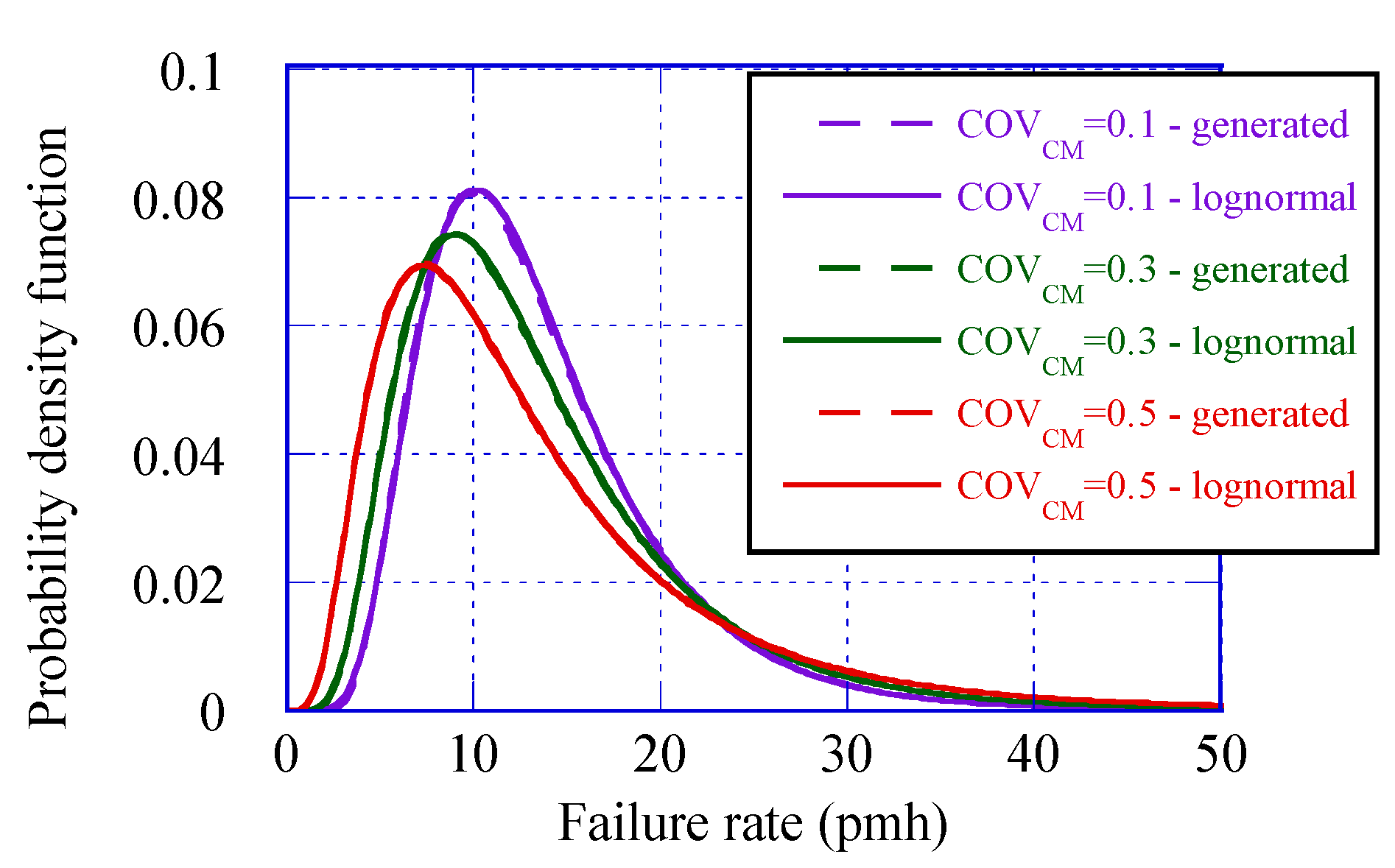
Figure 7 shows the generated prior distributions of
λS and their lognormal approximations (more exactly, probability density functions of the distributions) for the three different values of COV
CM. As can be seen, there is an excellent agreement between the generated distributions and their lognormal approximations (at the scale of the figure, no difference between the generated distributions and their approximations can even be observed). In addition to
Figure 7, the prior estimates of the failure rate of the seal obtained are presented in
Table 1 in the format employed in the OREDA database [
7], i.e., in terms of its mean value,
μλ,s, COV
λ,s (instead of standard deviation given in [
7]) and 90% uncertainty interval defined by its lower (5%) and upper (95%) limits (denoted as
λS,0.05 and
λS,0.95, respectively).
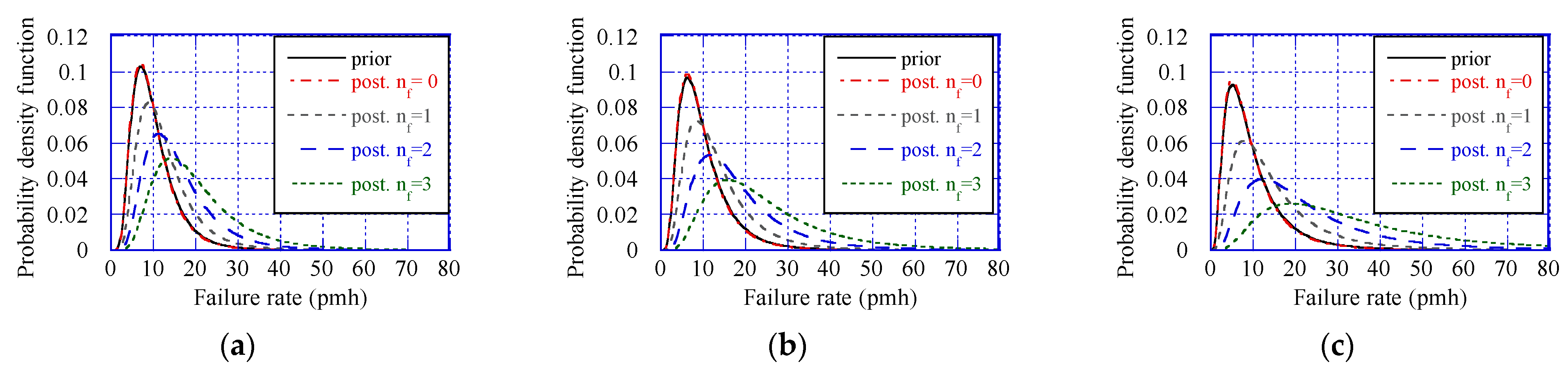
To illustrate the updating, i.e., how new information about the seal performance in operating HATT(s) may affect the distribution and the main characteristics
λS, several possible scenarios have been considered. First, four possible outcomes—no failure and one, two and three failures, for a single main seal in an HATT, which has been in operation for one calendar year, have been taken into account. Results of this analysis for the three values of COV
CM are presented in
Figure 8 and
Table 1 in terms of the posterior distributions and the main characteristics of
λS, respectively. As can be seen, the information that one seal has operated during one calendar year without failure has a very small effect on the distribution of
λS (the posterior distributions for
nf = 0 are practically identical to the corresponding priors) and, subsequently, on its main characteristics. This occurs because the probability of the seal failure within one calendar year based on its prior mean value is relatively low (less than 0.06) so that this outcome is more or less expected. The effect of this new information is slightly more noticeable but still small when belief in the prior distribution is weak (i.e., COV
CM = 0.5)—the mean value of
λS and the width of the uncertainty interval marginally decrease. However, if the seal fails during one calendar year of its operation this significantly affects the distribution and the main characteristics of
λS—the distribution becomes flatter, its mean value and standard deviation increase, and subsequently the uncertainty interval widens. It is interesting to note that the COVs of the posterior distributions change very little compared to their values of the corresponding priors (even slightly decrease) but the increase in the mean values results in a major increase in values of the standard deviations. Obviously, as the number of failures increases, their influence on the distribution of
λS becomes more prominent.
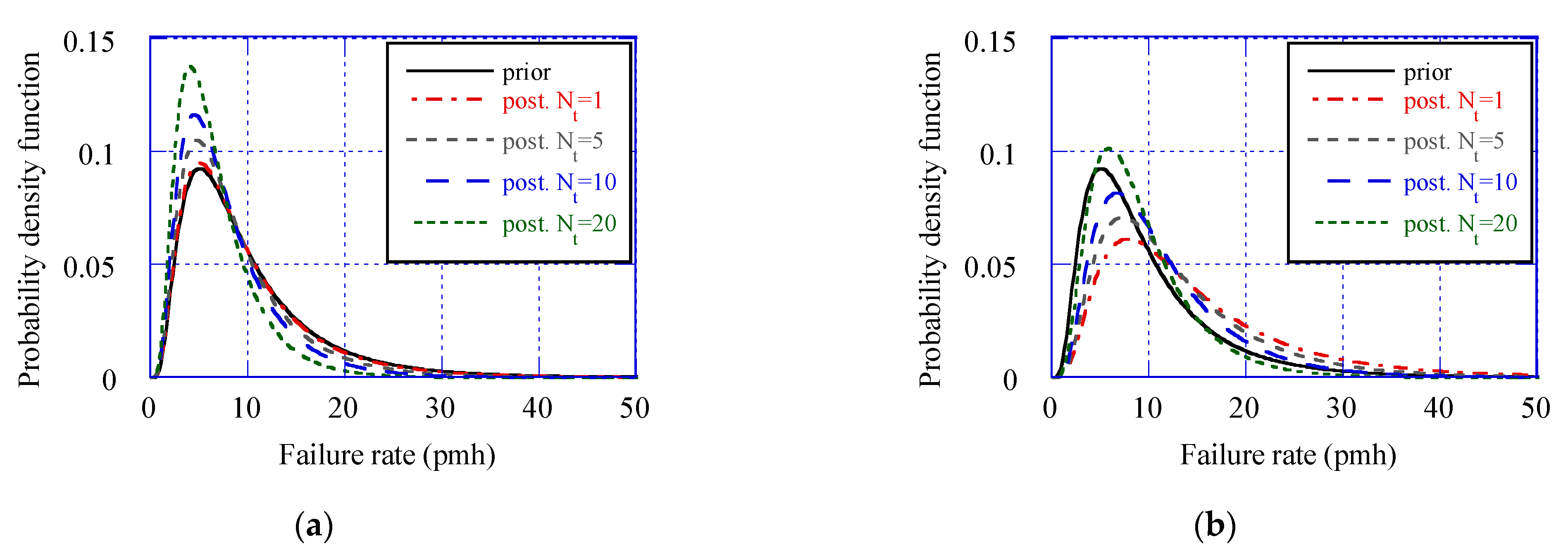
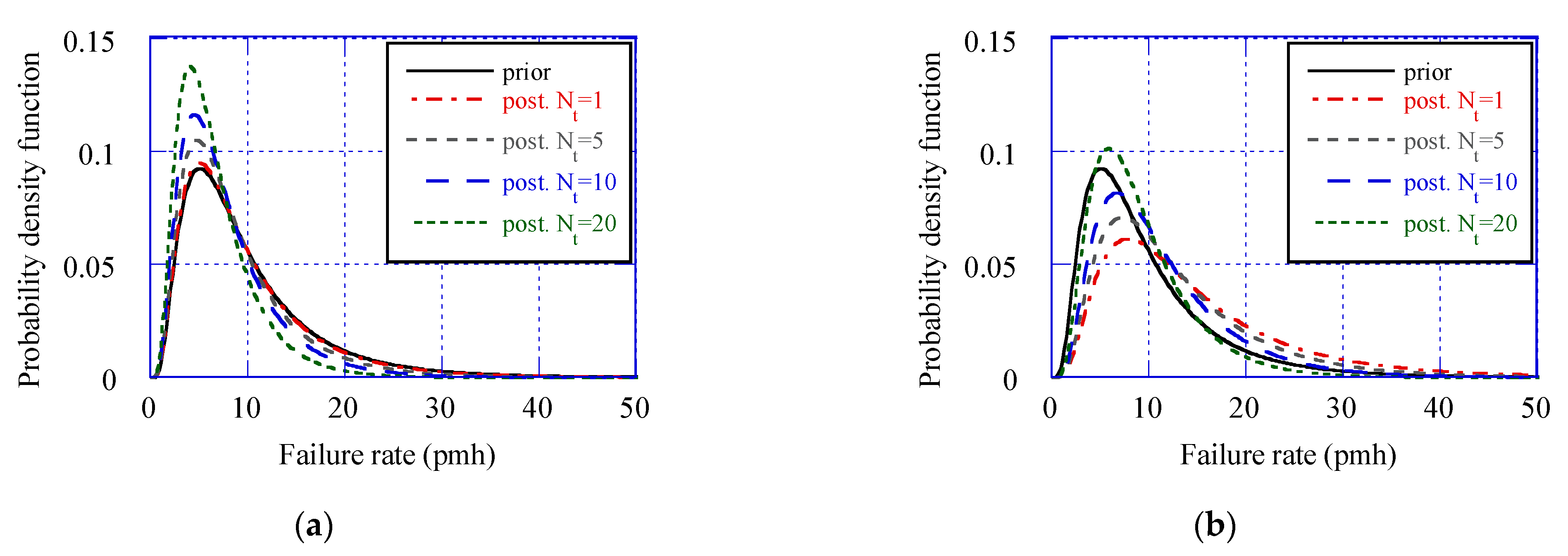
Second, the influence on new information is examined when an array of the identical HATTs (described previously) has been in operation for one calendar year. Three values of the number of the HATTs in the array,
Nt, are considered—5, 10 and 20. Two possible outcomes are considered—no failures of the seal and one failure across all HATTs in the array. The main characteristics of the seal’s failure rate after updating are presented in
Table 2 for the three values of COV
CM; the results for one HATT have been included in the table for ease of comparison. In addition, the posterior distributions of
λS for COV
CM = 0.5 are presented in
Figure 9 for visual comparison. As expected, as the number of the identical seals for which the new information becomes available increases, the impact of this information on the evaluation of the seal’s failure rate becomes more significant. In the case of no observed failure (i.e.,
nf = 0), both the mean value and COV of the failure rate steadily decrease as the number of seals increases. If one failure has occurred, then for the smaller numbers of the seals (i.e., 1, 5 and 10) the mean value of
λS and uncertainty associated with its evaluation increase compared to the prior data. However, when
Nt = 20, the mean value and the uncertainty become smaller than the corresponding priors. As expected, the impact of the new information is stronger when belief in the prior distribution of
λS is weaker (i.e., the strongest for COV
CM = 0.5).
4.4. Evaluation of the Failure Rate of the Main Bearing
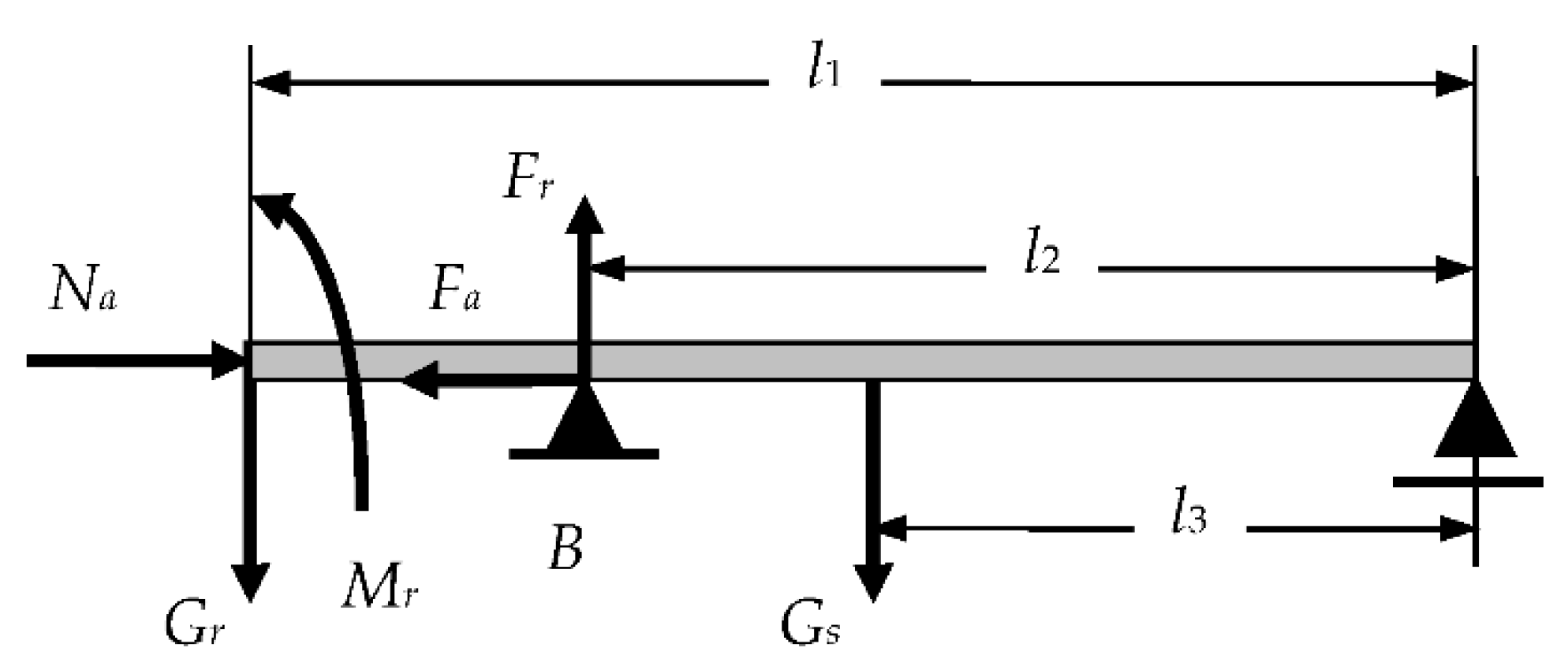
The main bearing is located at point B (see
Figure 5). Magnitudes of the horizontal and vertical support reactions acting at B on the shaft are equal to the bearing axial,
Fa, and radial,
Fr, loads, respectively. The equilibrium of the shaft requires
Fa =
Na and
Fr = (
l1/
l2)(
Gr + 0.5
Gs). The values of the parameters appearing in the formula for
Fr have been described previously in
Section 4.2; substituting them into the formula results in
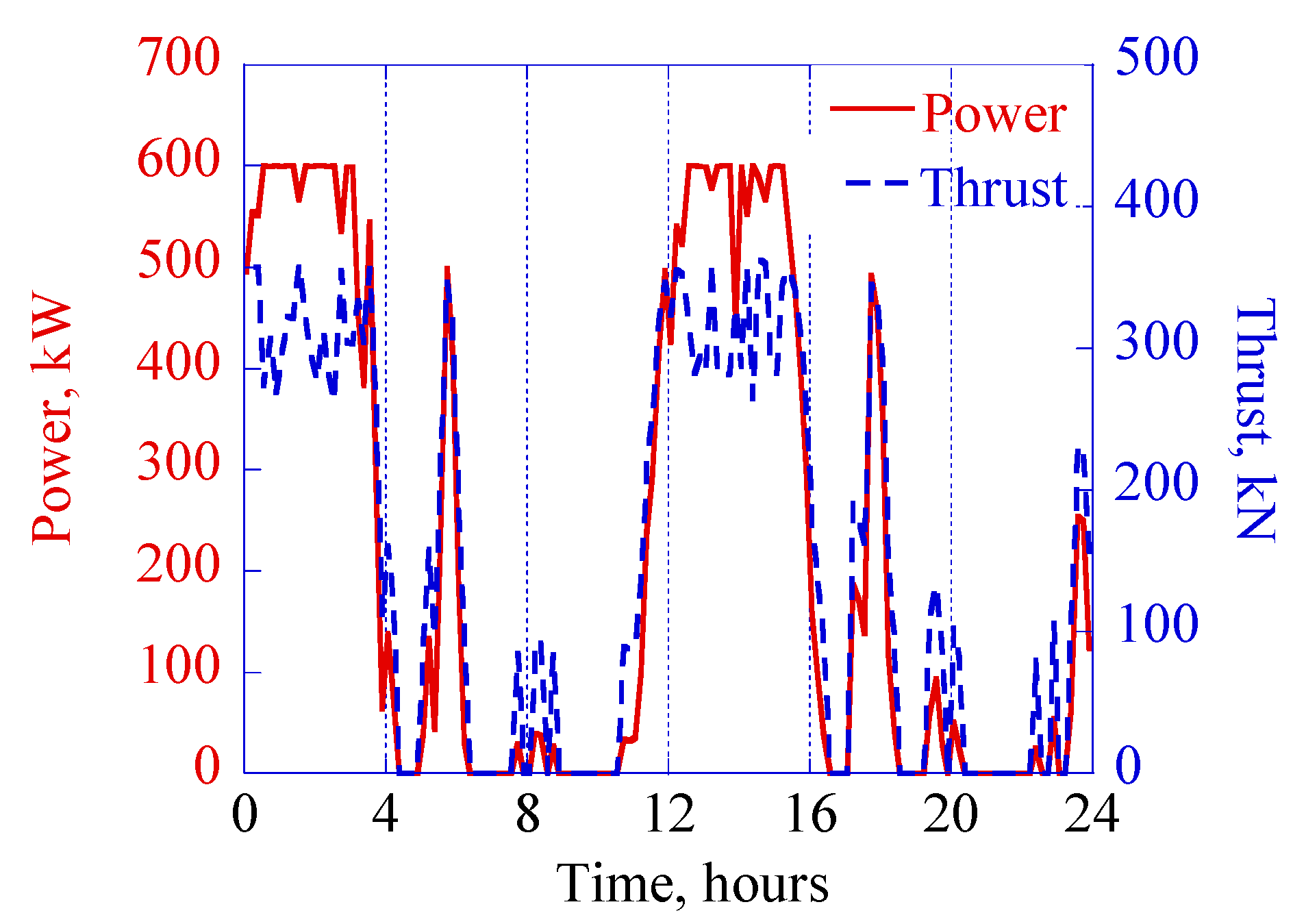
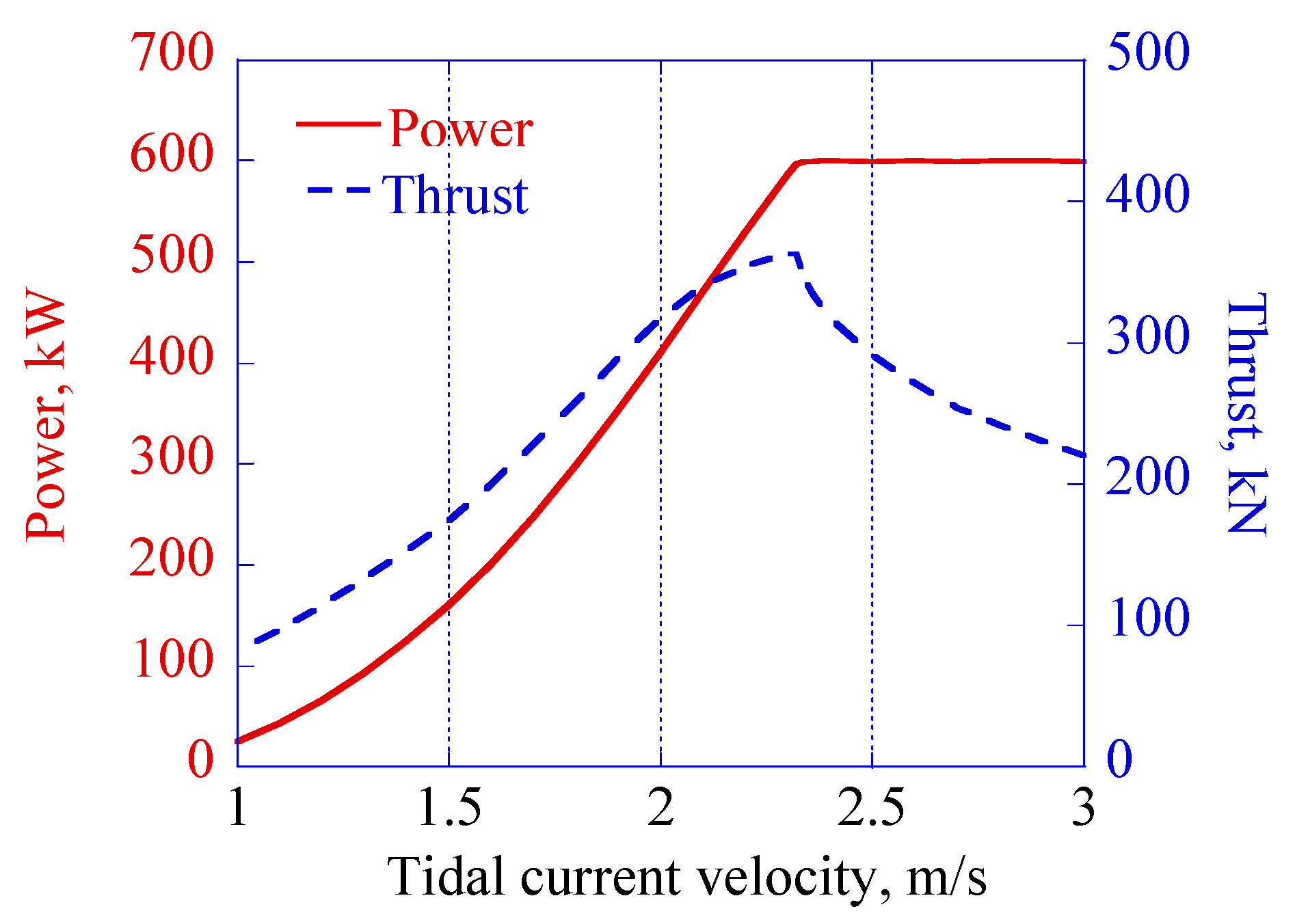
Fr = 27.6 kN. Comparing the calculated value of the radial load with the values of the thrust shown in
Figure 4, it can be seen that the radial load on the main bearing is much smaller than the axial load. Thus, a rolling bearing that is capable to support high axial load along with radial load is needed. A spherical roller bearing suits this requirement. An additional advantage of this type of rolling bearing is that it tolerates misalignment of the shaft relative to the housing and shaft deflection during operation. According to the shaft diameter and estimated axial and radial loads a spherical roller bearing 23,244 CC [
34] has been selected for the main bearing in this example. It has the following characteristics: bore diameter
d = 220 mm, outside diameter
D = 400 mm and basic dynamic load rating
C = 2360 kN.
Performance of a rolling bearing is characterised by its basic rating life
L10, which is bearing fatigue life associated with 90% reliability expressed in 10
6 revolutions (e.g., [
35])
where
P is the dynamic equivalent load and
p the load-life exponent (=10/3 for roller bearings). The dynamic equivalent load is estimated by combining axial and radial loads as
where
X is the dynamic radial load factor and
Y the dynamic axial load factor; for 23,244 CC
X = 0.67 and
Y = 2.9 [
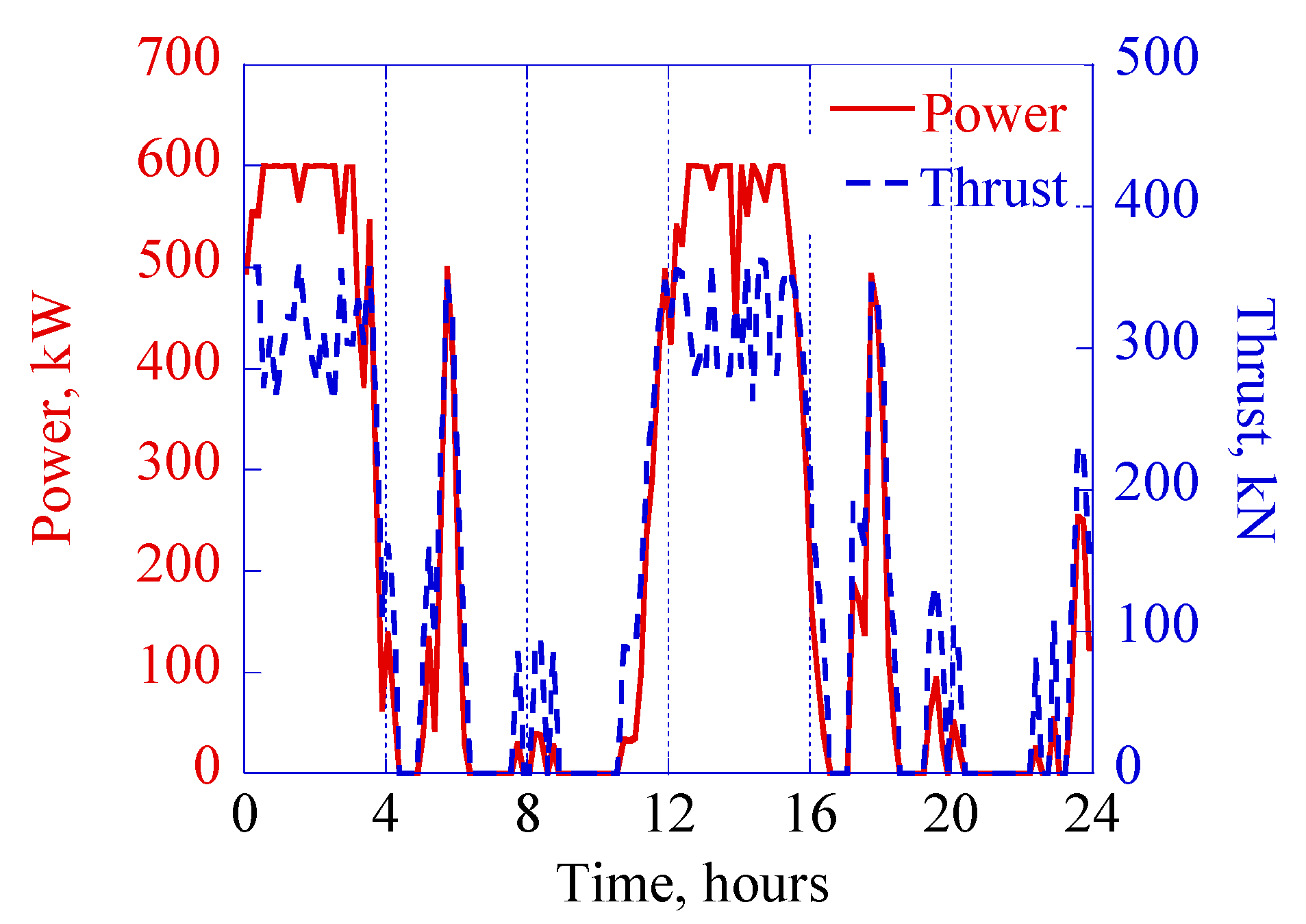
34]. The trust and, subsequently, the axial load
Fa vary with time (see
Figure 4). In this case,
P in Equation (13) can be replaced by a mean effective bearing load,
Pm [
35]
where
Nr is the total number of revolutions in one load cycle. Since the rotational speed of the rotor is constant this formula is equivalent to:
where
t is the duration of one load cycle, which can be taken as 24 h (for simplicity, seasonal variations in tidal current velocity are not considered in this example). Equation (16) was integrated numerically using the results for the axial trust shown in
Figure 4 that yielded
Pm = 820 kN.
The rating life, Equation (13), accounts only for fatigue failure of a properly manufactured rolling bearing, which operates under conventional operating conditions, i.e., when the bearing is properly mounted, protected from foreign matter, adequately lubricated and not exposed to extreme temperature or excessive loads [
36]. However, the actual operating conditions of a bearing may differ from the conventional ones. Poor lubrication, contamination, misalignment, shock and vibration, overheating and overload—all these and some other factors may cause premature failures (i.e., earlier than predicted by Equation (13)), whose mechanisms are different from that of rolling contact fatigue. Possible rolling bearing failure modes and their mechanisms are well documented in [
37].
To account for the possible failure modes, Equation (3) for the failure rate of a rolling bearing,
λRB, can be expressed in the following form [
10]:
where
λRB,B is the base failure rate,
Cν is the influence factor for lubricant,
CC the influence factor for contamination,
CT the influence factor for operating temperature,
CSF the influence factor for operating service conditions, and
CM takes into account model uncertainty. Since the selected bearing 23,244 CC is tolerant to misalignment the corresponding influence factor is not taken into account. It is estimated that the operating temperature of the main bearing does not exceed 100 °C; in such conditions
CT = 1 [
10] and, therefore, may be excluded from further consideration.
As should be clear from the previous discussion,
λRB,B represents the fatigue failure mode and, therefore, should be related to
L10. The latter is derived from the distribution of the rolling bearing fatigue life, which is described by a Weibull distribution [
35]:
where
θ is the characteristic life and
α the Weibull slope; for roller bearings, it is recommended to use
α = 9/8 [
35]. According to the definition of
L10, there is the following relationship between the latter and the characteristic life:
The average failure rate is the reciprocal of the mean time to failure (MTTF) [
7], i.e.,
λRB,B = 1/MTTF, while for the Weibull distribution MTTF =
θΓ(1/α + 1), where Γ(.) is a gamma function. For α = 9/8, Γ(1/α + 1) = 0.9580 that leads to
λRB,B = 0.1412/
L10. To take into account various uncertainties associated with the determination of
λRB,B (in particular, with the determination of
L10), the latter will be treated as a lognormal random variable with a mean equal to 0.14/
L10 and COV = 0.20.
The influence factor for lubricant,
Cν, can be estimated as [
10]:
where ν is the actual kinematic viscosity of the lubricant at the operating temperature and ν
1 the reference kinematic viscosity required to obtain adequate lubrication condition. For rotational speed ω < 1000 rpm, the latter can be calculated as [
36]:
where
dm = 0.5(
d +
D) is the mean bearing diameter in mm. For the main bearing considered in the example
ν1 = 286 mm
2/s. The lubrication condition is characterised by the viscosity ratio
κ =
ν/
ν1. The higher
κ, the smaller
Cν and the lower the failure rate, i.e., the longer the bearing life. However, the viscosity ratio should not exceed 5 because of increased friction losses at higher values of
κ. Lubricant viscosity decreases exponentially with increasing operating temperature. Therefore,
Cν is very sensitive to the operating temperature of the main bearing, which may vary significantly over the turbine operating time. It is estimated that the operating temperature varies between 20 °C and 100 °C with a mean of 60 °C. This variability of the operating temperature is described by a beta distribution with COV = 0.20. For illustrative purposes, a synthetic lubricant of ISO VG 1500 class with VI = 160 is selected for the main bearing. The relationship between the kinematic viscosity (in mm
2/s) of this lubricant and the operating temperature (in °C),
To, can be approximately described by the following formula:
The influence factor for contamination takes into account both water and particle contamination and is expressed as [
12]:
where c
w is the percentage of water in the lubricant and
FR the oil filter rating in μm (it is assumed that
FR = 20 μm). The percentage of water in the lubricant is treated as a random variable. It is assumed that it can be described by a beta distribution defined on the interval (0.01,1) with mean 0.2% and COV = 0.30.
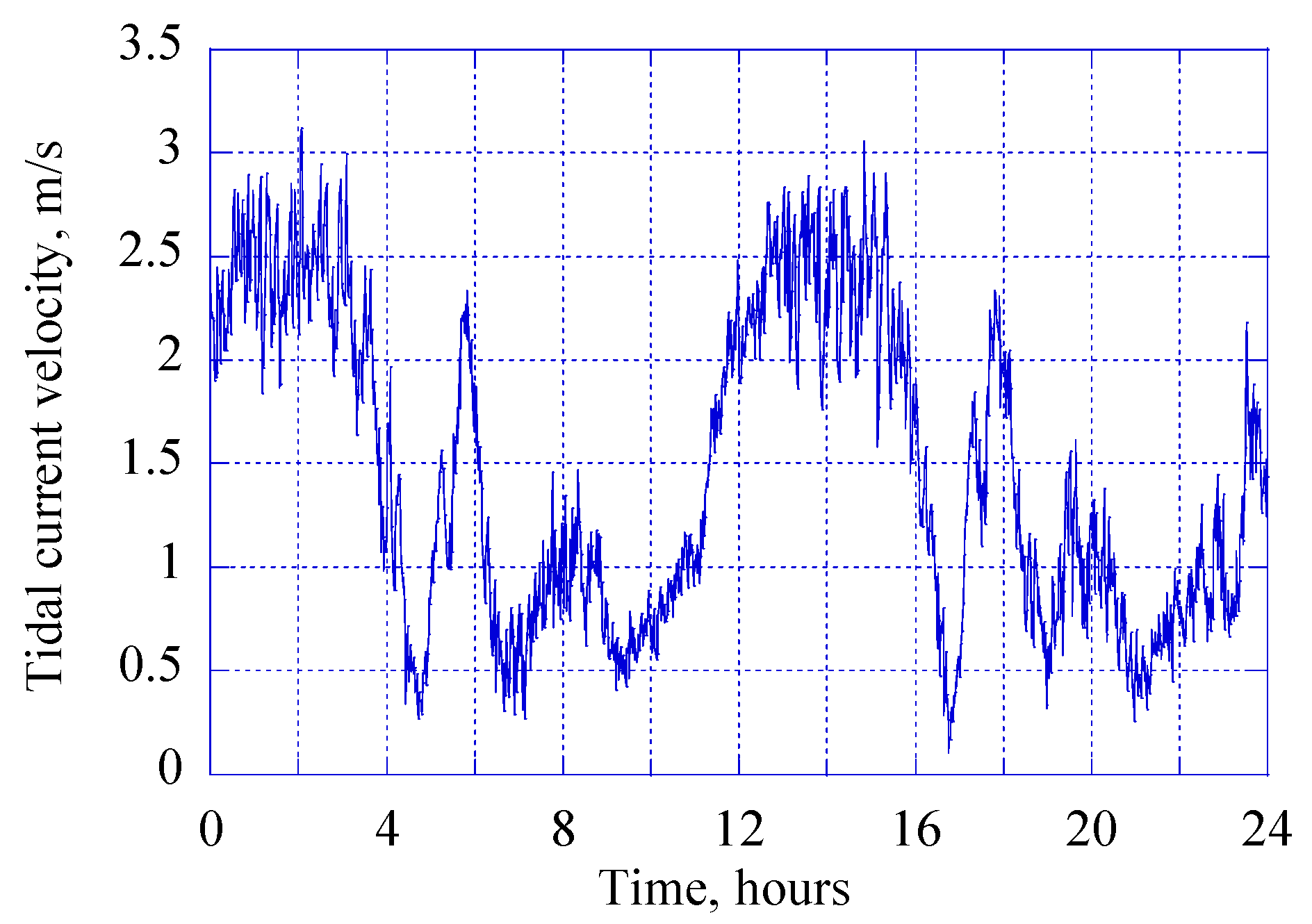
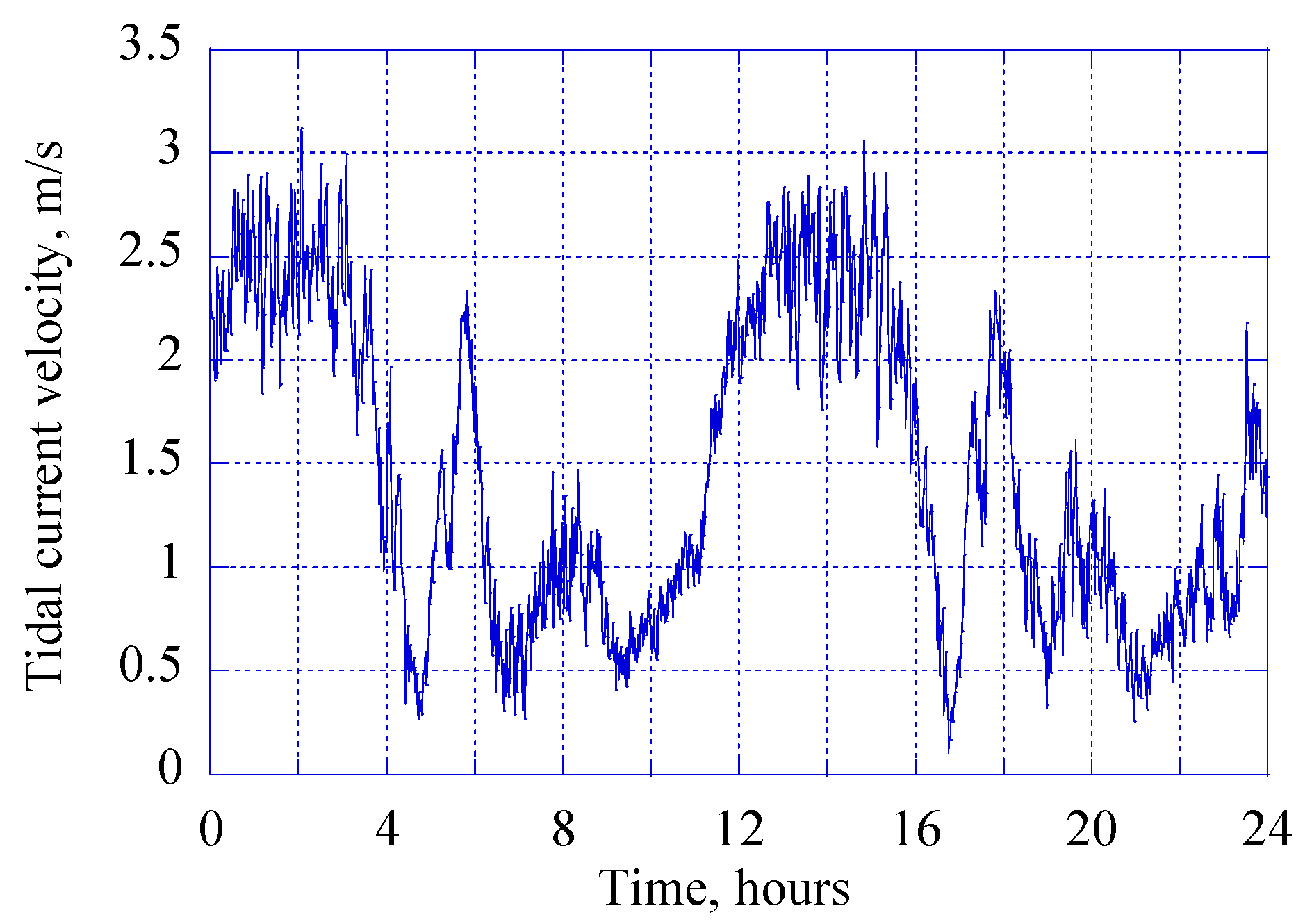
The influence factor for operating service conditions accounts for a negative effect of shock and vibration on the failure rate of a rolling bearing. As can be seen from
Figure 2, there is significant turbulence of tidal flow that causes shock loads and possible vibrations of the main bearing. Thus,
CSF is modelled as a beta random variable defined on (1, 3) [
10] with a mean of 1.5 and COV = 0.20.
CM is treated exactly in the same way as in the evaluation of the failure rate of the main seal.
Initially, the prior distributions of the failure rate of the main bearing were generated for the three different values of COV
CM and their lognormal approximations were found. These results are presented in
Figure 10, while the main characteristics of the prior estimates of the failure rate are shown in
Table 3. Similar to the corresponding results for the main seal, an excellent agreement can be observed between the generated prior distributions and their lognormal approximations. To illustrate the effects of updating, first, four possible outcomes of the bearing operating during one calendar year—no failure, one, two and three failures, were considered. The updated values of
μλ,RB, COV
λ,RB,
λRB,0.05 and
λRB,0.95 are presented in
Table 3. Similar to the corresponding results for the main seal, the information that one bearing has operated without failures for one year does not change significantly the failure rate estimates compared to their prior values. However, if the main bearing fails during one year the updated values of its failure rate become noticeably higher and the uncertainty interval much wider, in particular when belief in the prior estimate is weak (i.e., COV
CM = 0.5). The results obviously also depend on the number of failures over the one-year period.
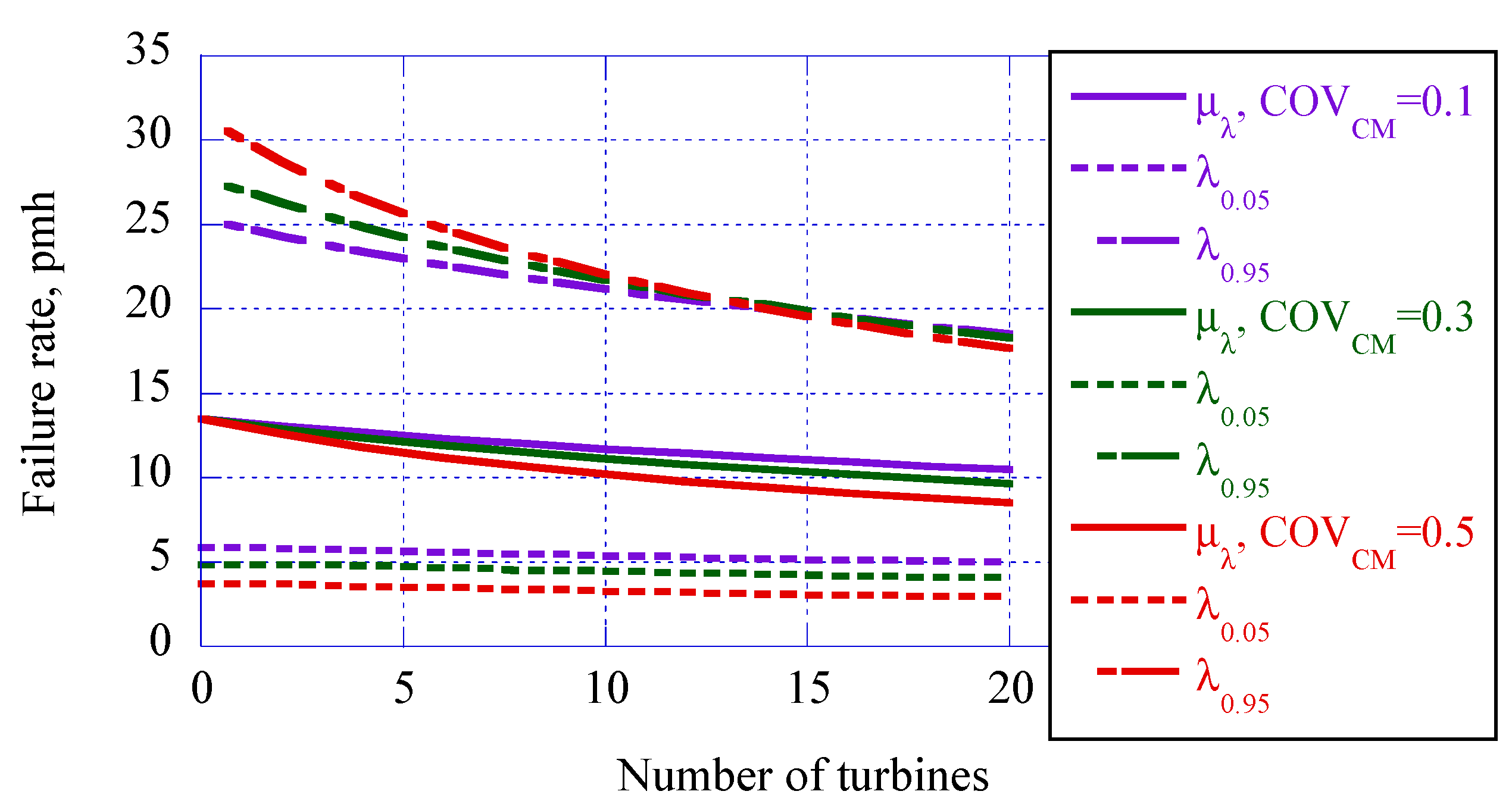
Second, the effect of operating without failures of the main bearing of several identical HATTs (up to 20) during one calendar year was considered. The posterior distributions of the failure rate were derived using Equation (7), where
t was equal to the number of the turbines. Using these posterior distributions, values of
μλ,RB,
λRB,0.05 and
λ RB,0.95 were estimated. Results of the analysis are shown in
Figure 11. According to the results, if belief in the prior estimate is strong or medium (i.e., COV
CM ≤ 0.3) updating leads to relatively small changes in the failure rate characteristics. However, if belief in the prior estimate is weak then the use of the new information becomes more beneficial. The results demonstrate the importance of selecting a value of COV
CM. They show that this value should depend not only on existing data and knowledge about the performance of the mechanical component in other operating and environmental conditions but also on the availability of new reliability data related to the performance of this component in tidal stream turbines. If a large amount of such data is expected to become available within a relatively short period of time then a high value of COV
CM may be set to benefit more from these new data. However, if new data are scarce (e.g., obtained from testing a single prototype device) then more efforts need to be put into the validation and quantification of a prior model in order to increase our confidence in this model and reduce the value of COV
CM. The selection of COV
CM needs to be re-assessed as new data become available. If there is a noticeable difference between the observed number of failures and the expected one in accordance to the prior distribution, this may indicate that the model used to derive the prior does not take into account all possible failure modes and/or the influence factors do not fully cover the effects of actual operating and environmental conditions. As a result, the degree of belief in the prior model needs to be re-considered and then either the model should be modified or COV
CM increased.
Regarding the frequency of the failure rate updating, for mechanical components like the main seal and main bearing with the expected failure rate of the order of 10
−5 pmh, it can be recommended this is carried out annually, like in the case studies presented above. Taking into account the bathtub curve for failure rates (e.g., [
9]), it is expected that initially the failure rate of a component will be converging to its actual expected value. A steady increase of the failure rate over time will indicate that the component has reached its wear-out stage. At this stage, the proposed approach can still be used (with constant updating of the failure rate) or, if there are enough data, a time-dependent model of the failure rate can be introduced. However, modelling of the failure rate at this stage is not that important from a practical point of view because if there is an indication of wear, the component should be replaced rapidly.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}