
Relay Identification Using Shifting Method for PID Controller Tuning


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
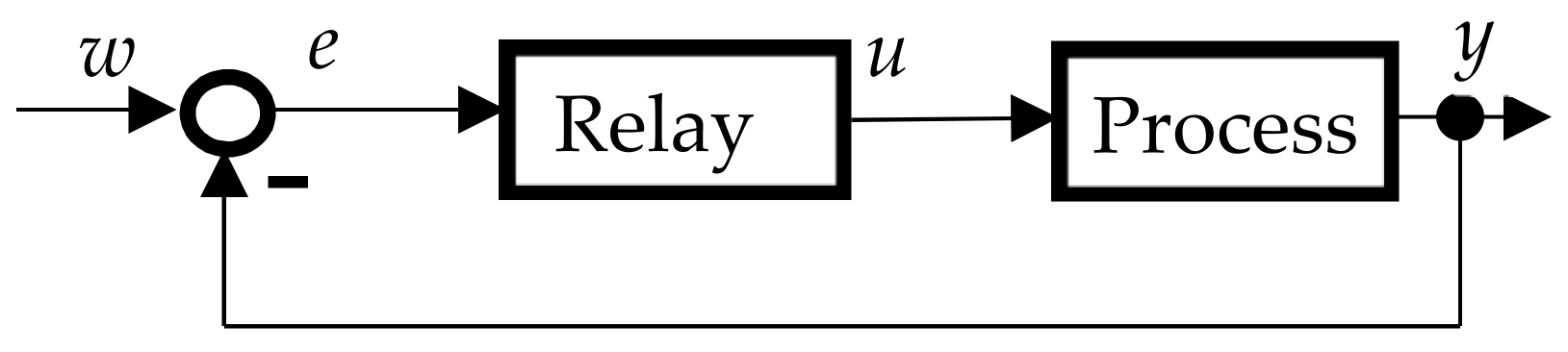
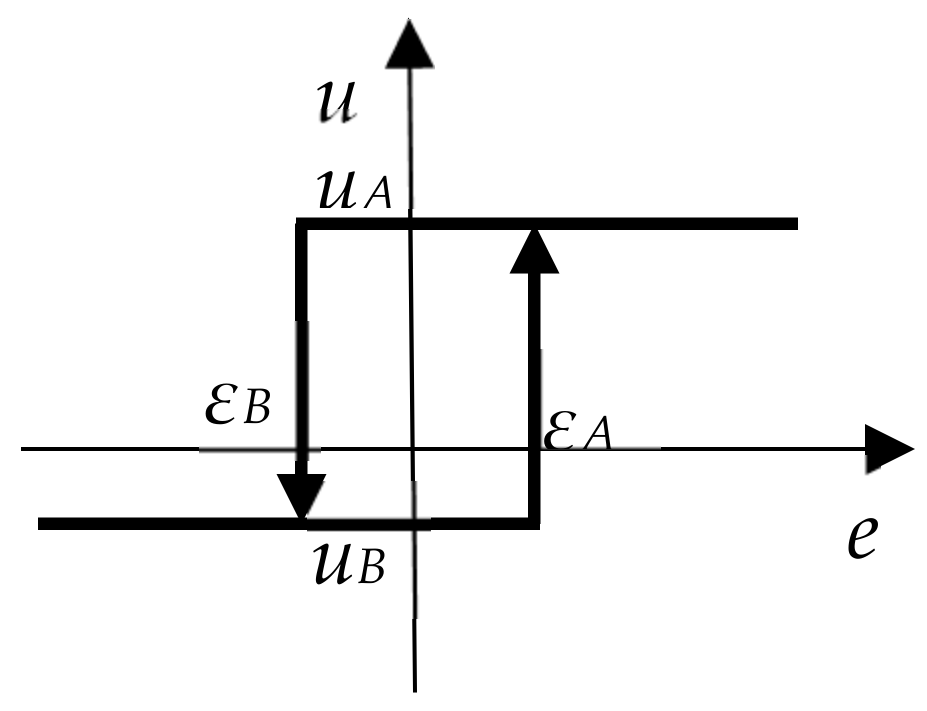
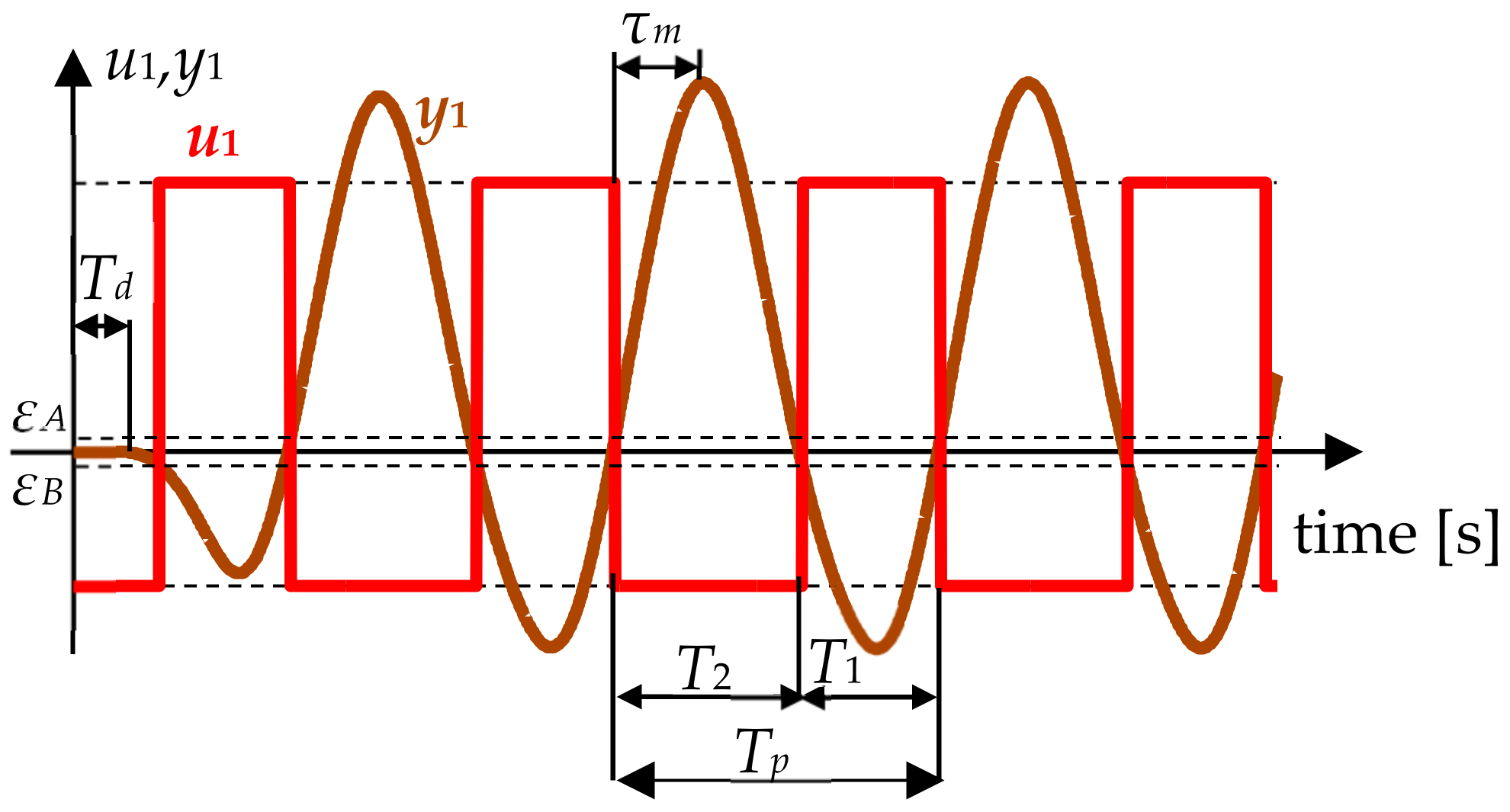
2. Relay Shifting Method
Background
3. Model Fitting
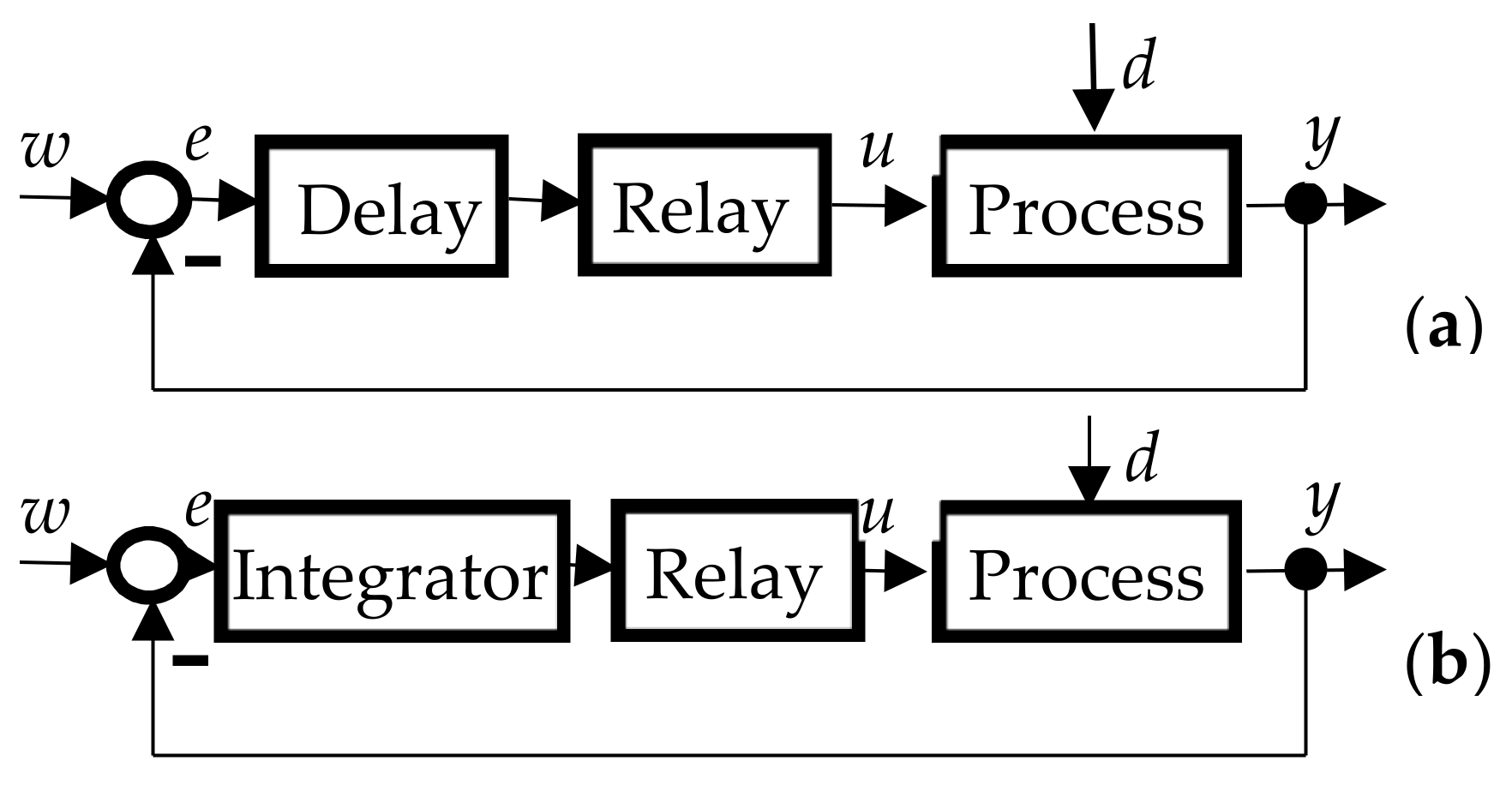
4. Relay Shifting Method with Additional Delay or Integrator
5. Examples of Using the Relay Shifting Method
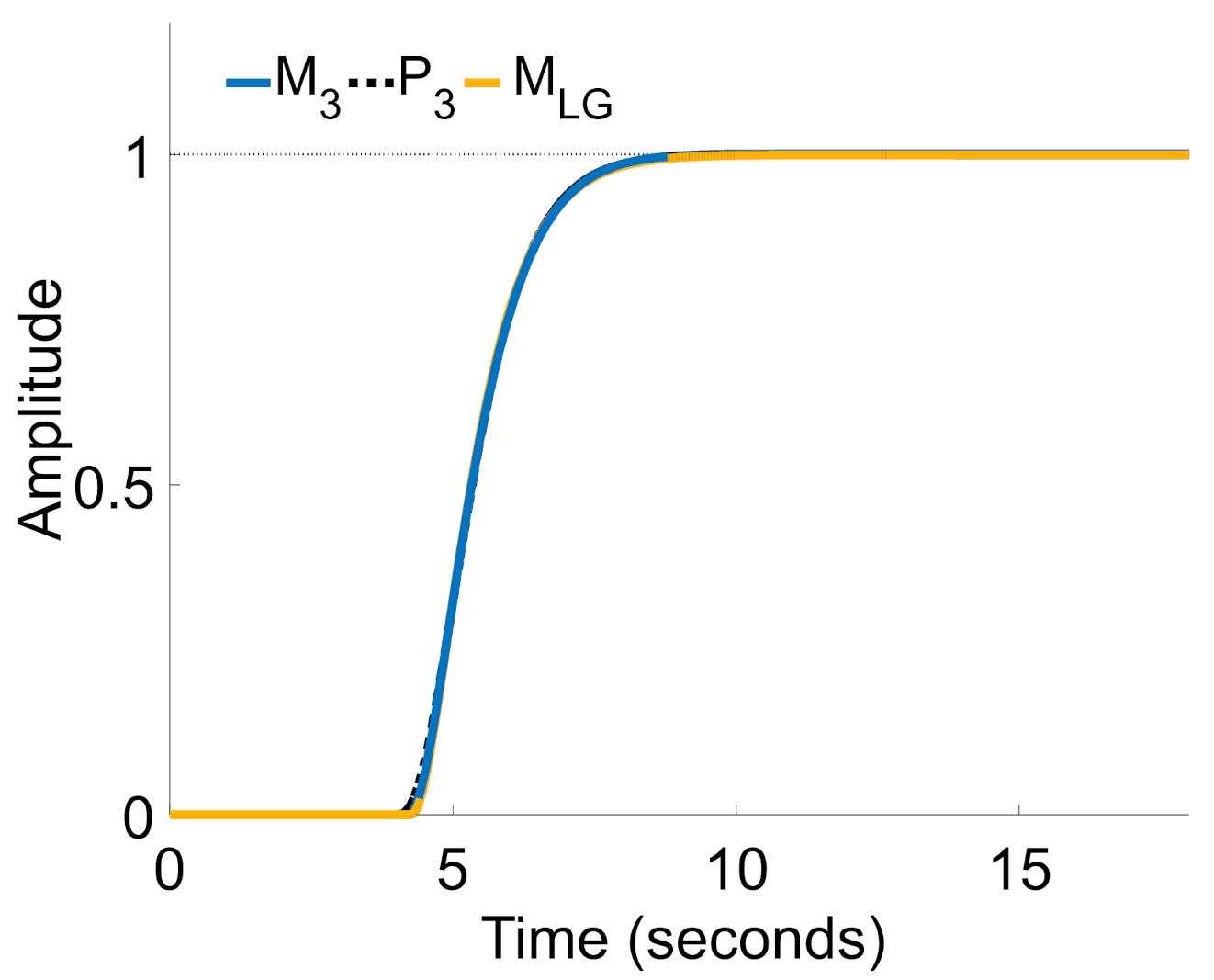
5.1. Lag-Dominated Non-Oscillatory Proportional Process
5.2. Lag-Dominated Oscillatory Proportional Process
5.3. Delay-Dominated Non-Oscillatory Proportional Process
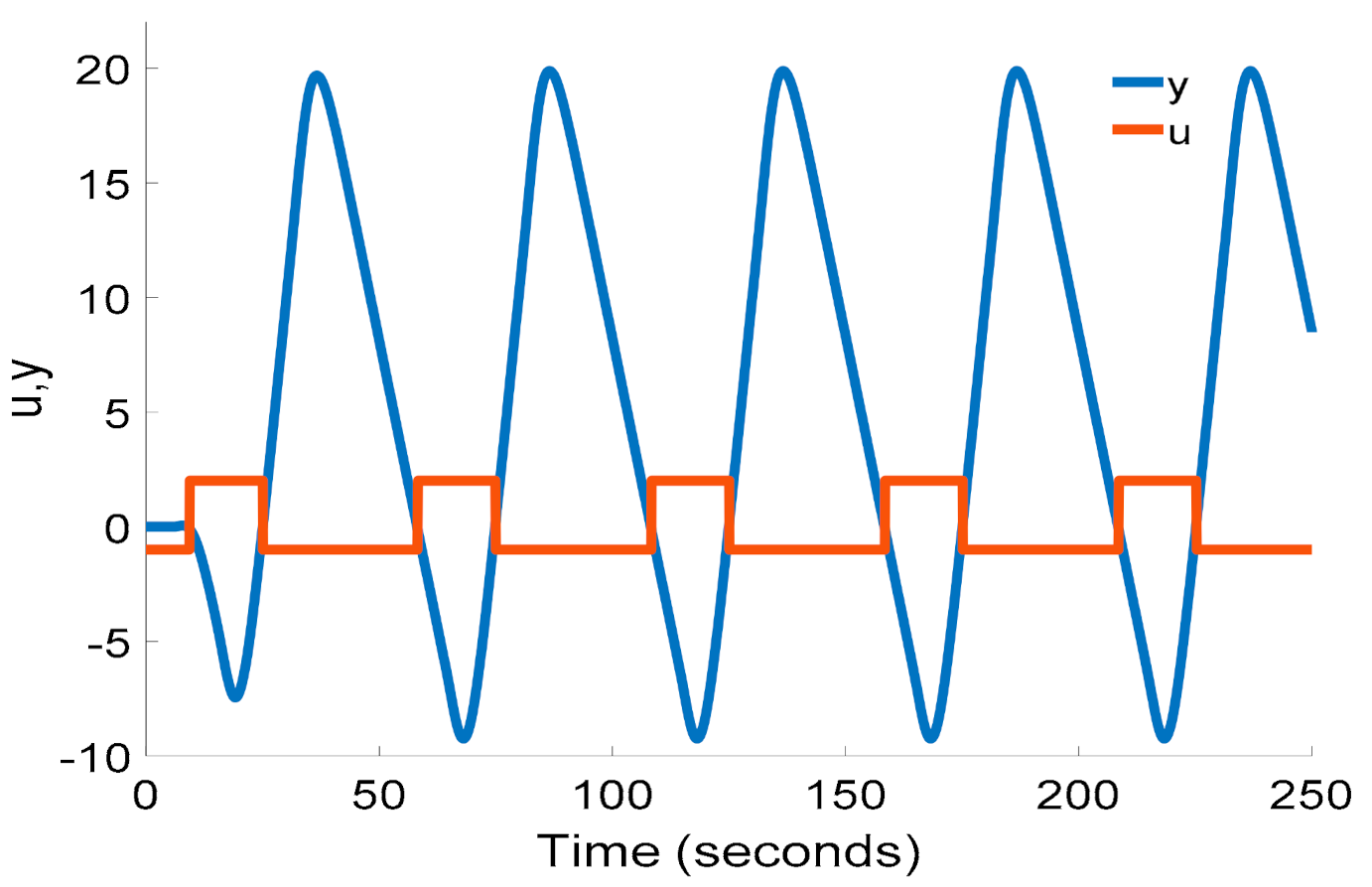
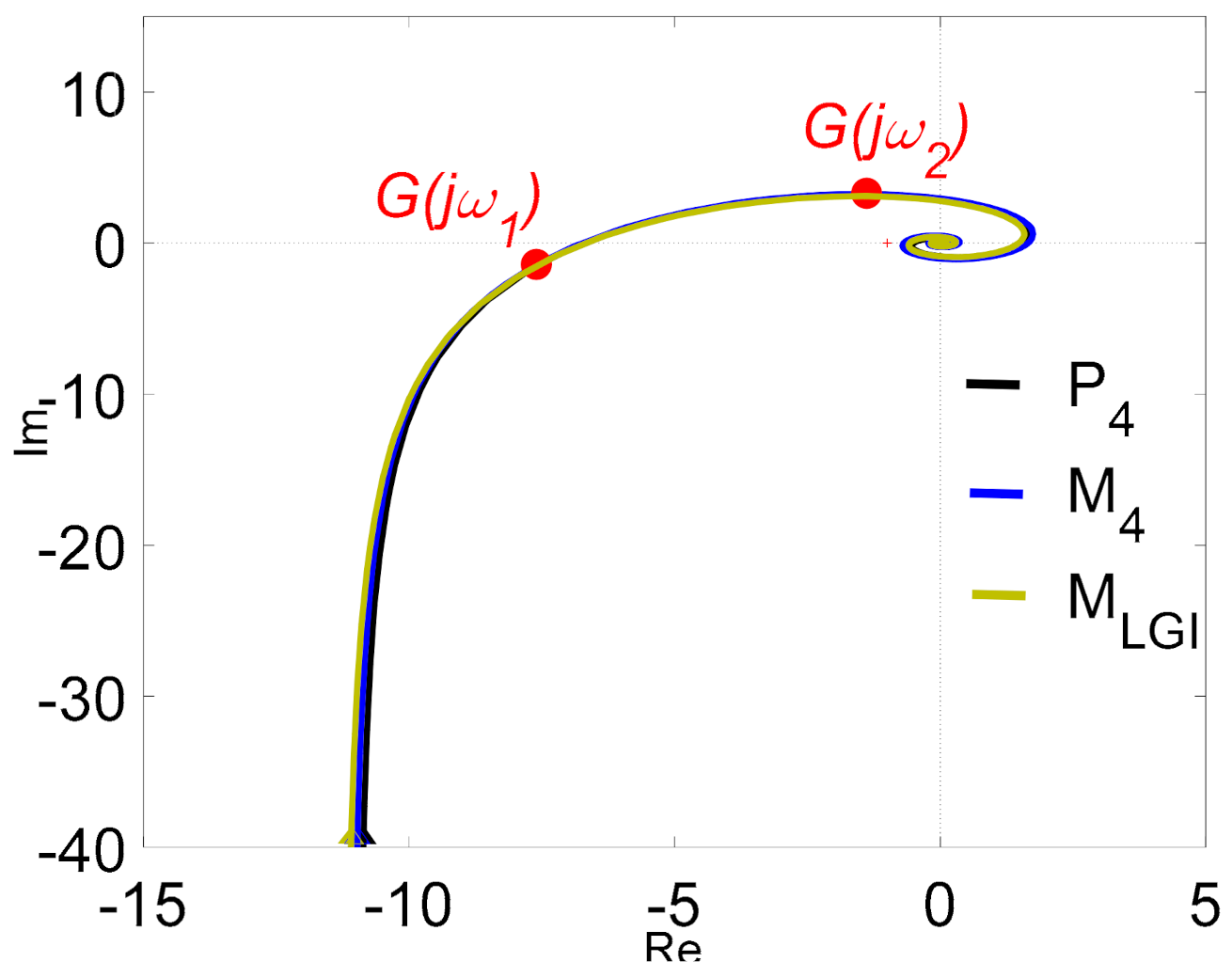
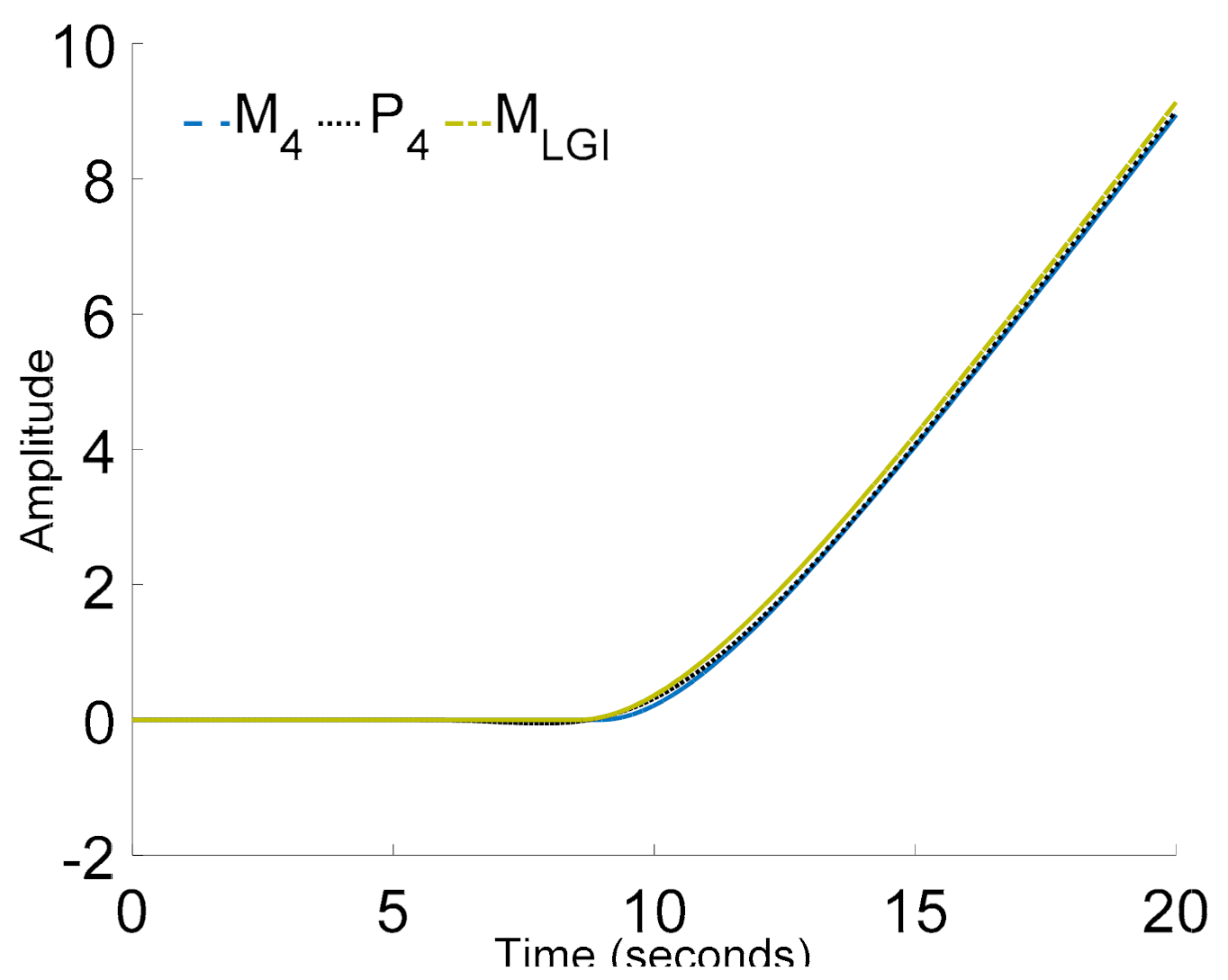
5.4. Integrating Process
5.5. Unstable Process with Delay
6. PID Controller Tuning
7. Examples of PID Tuning to Control Stable Processes Identified by the Relay Shifting Method
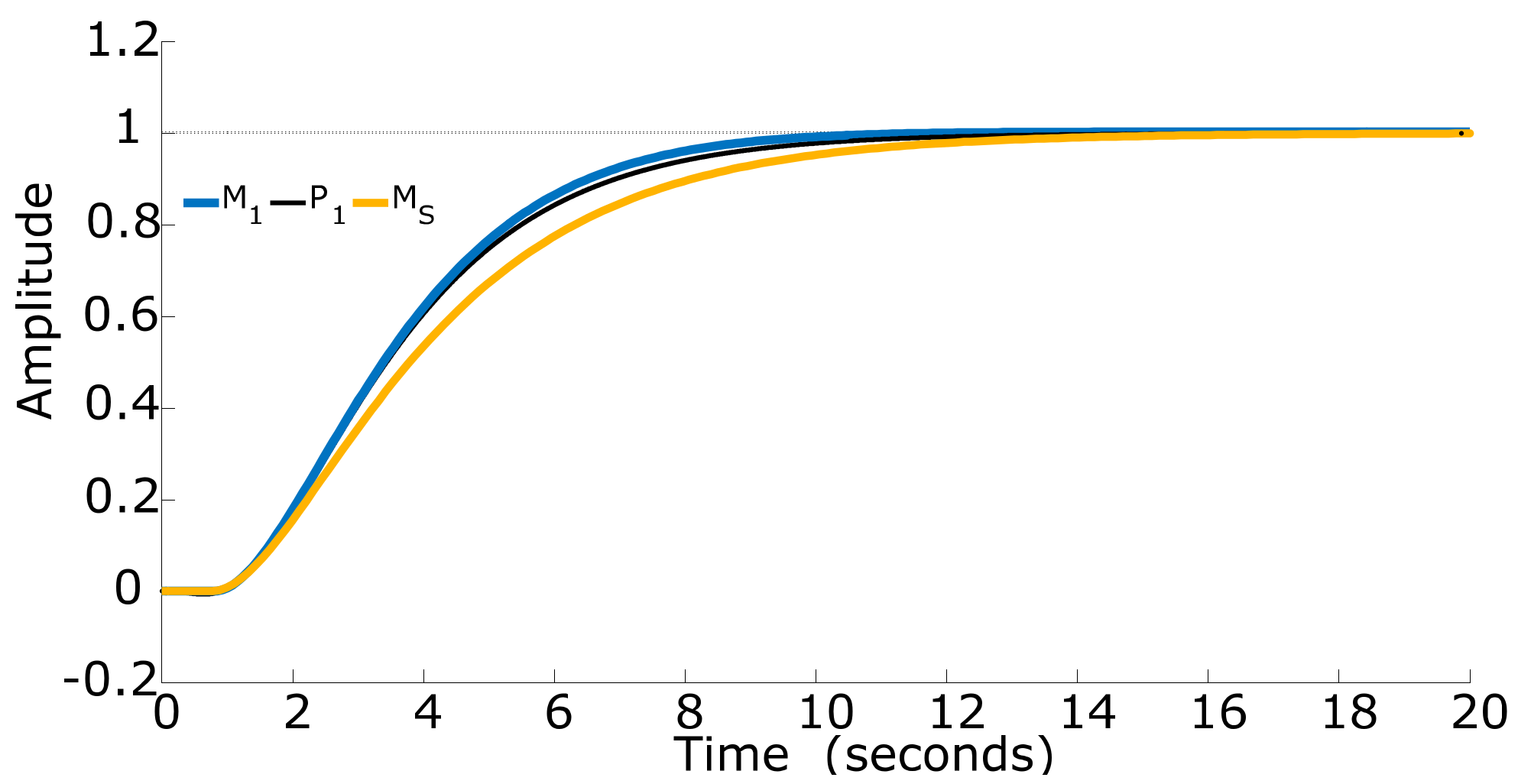
7.1. PID Control of Process P1
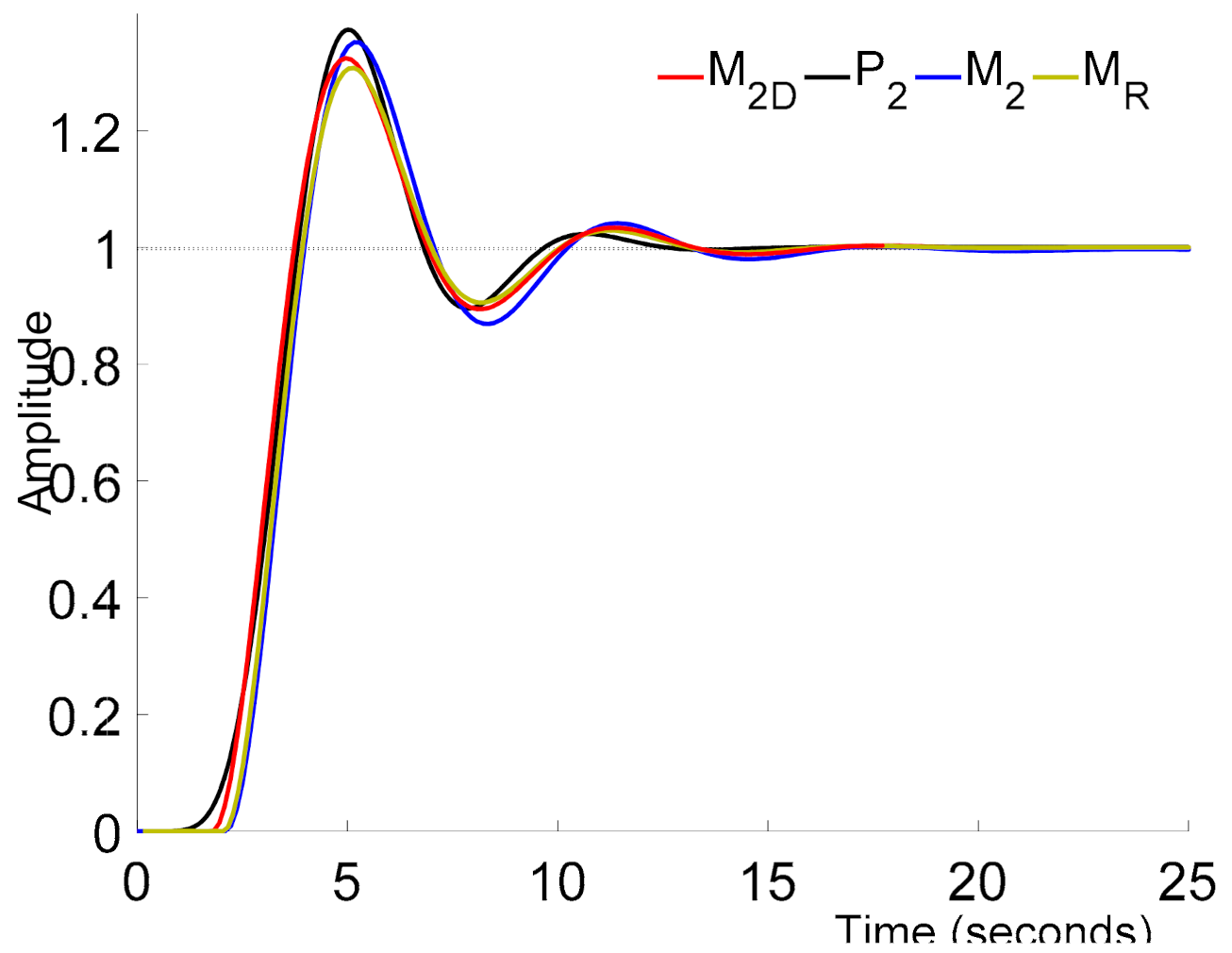
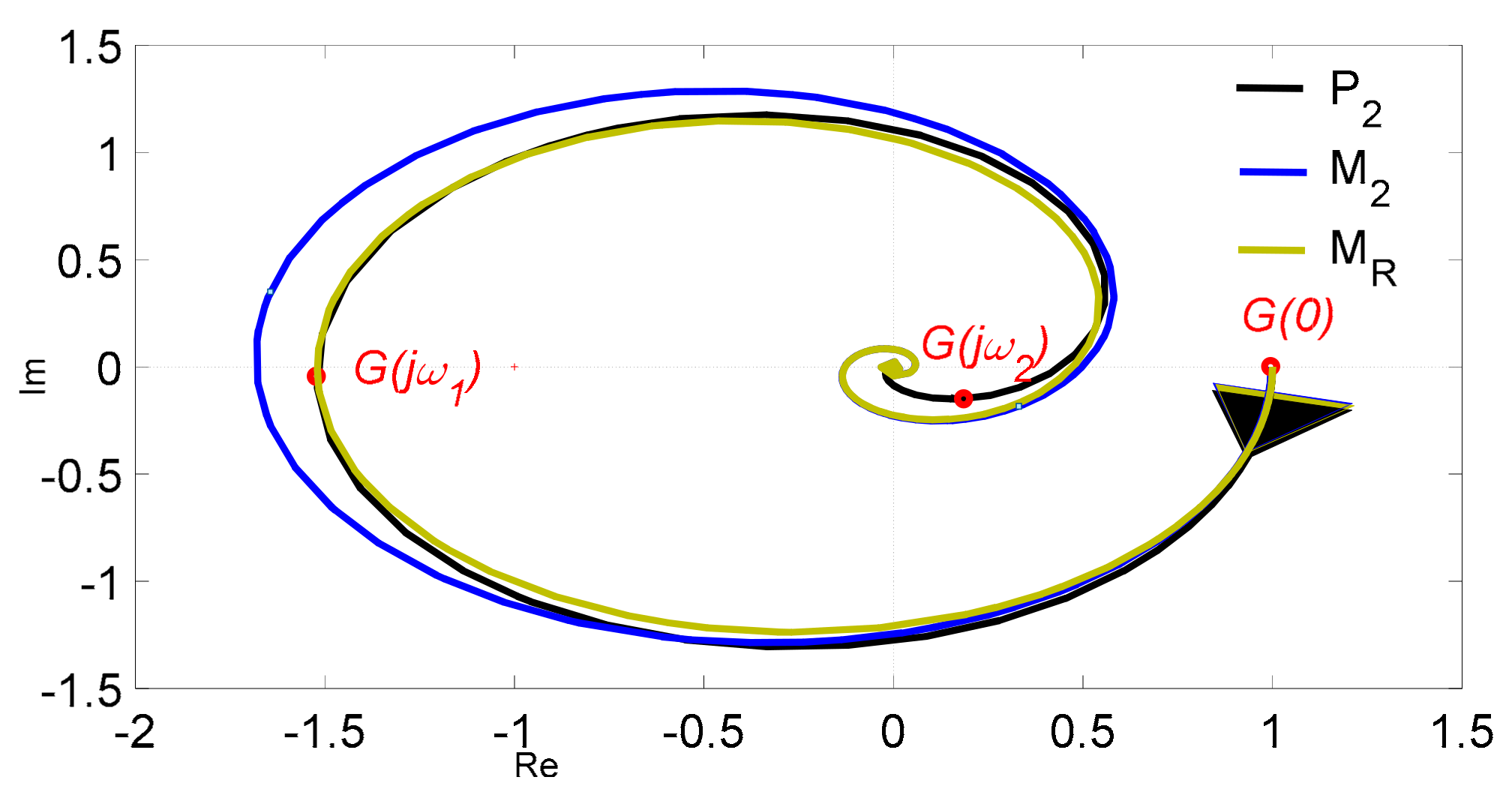
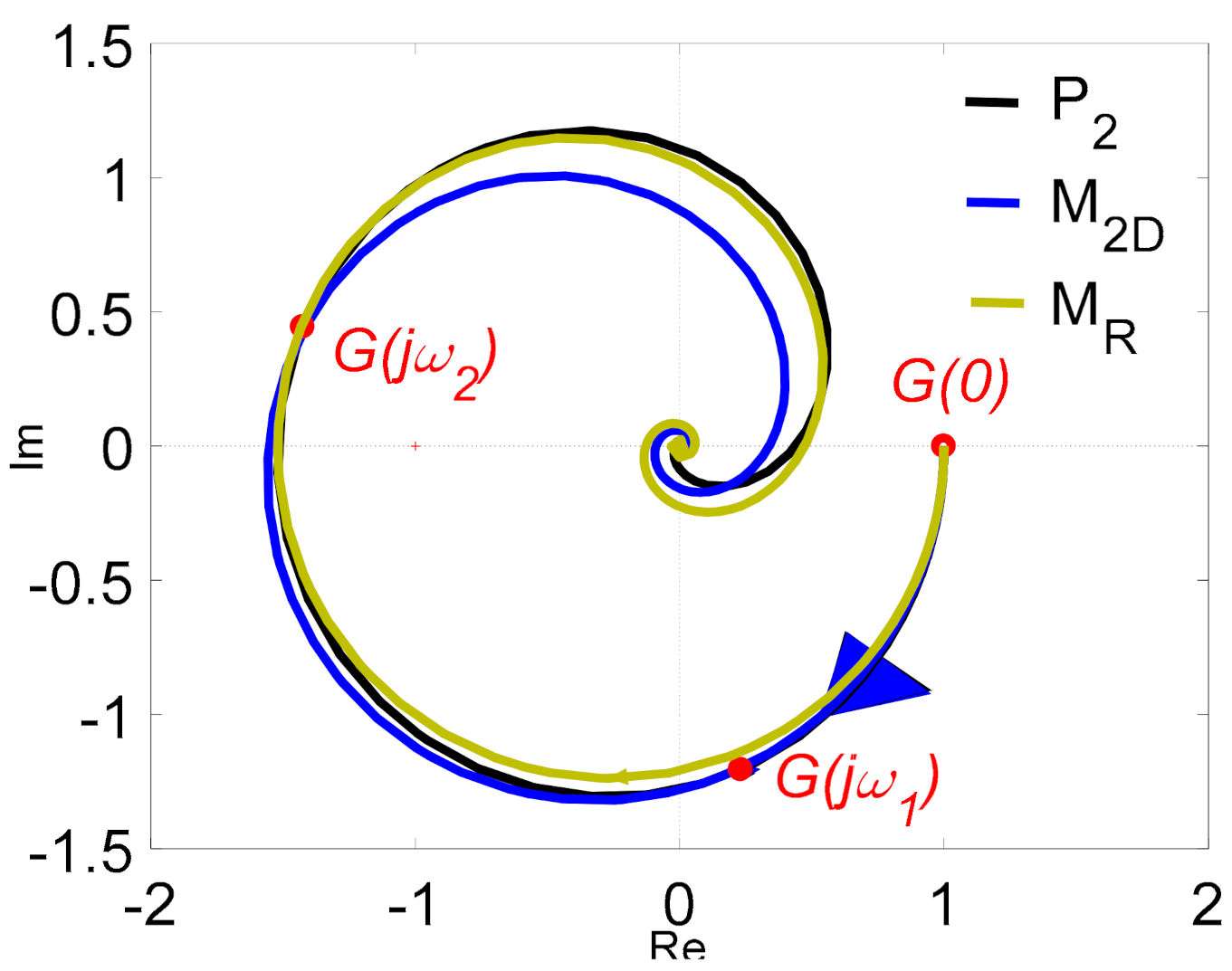
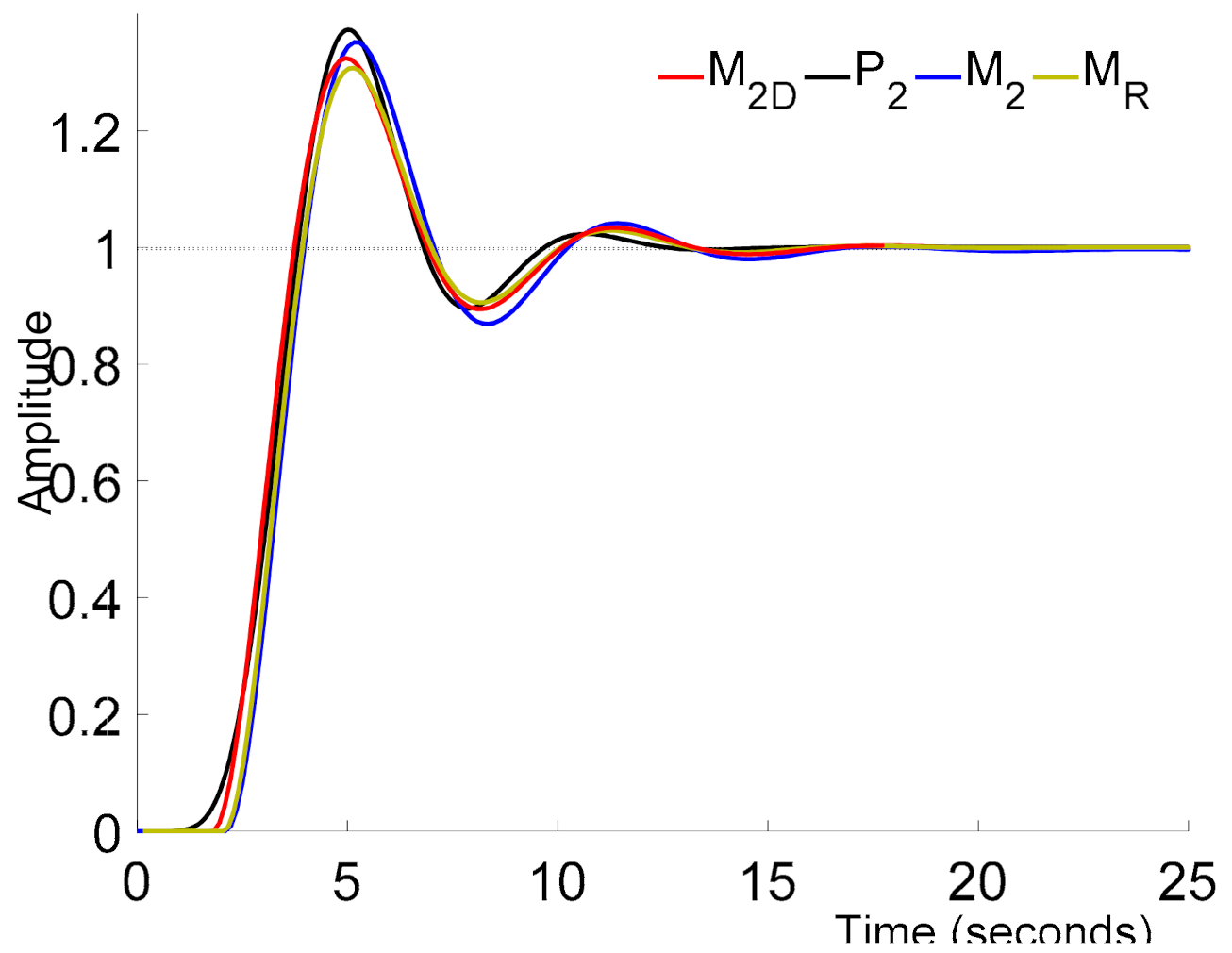
7.2. PID Control of Process P2
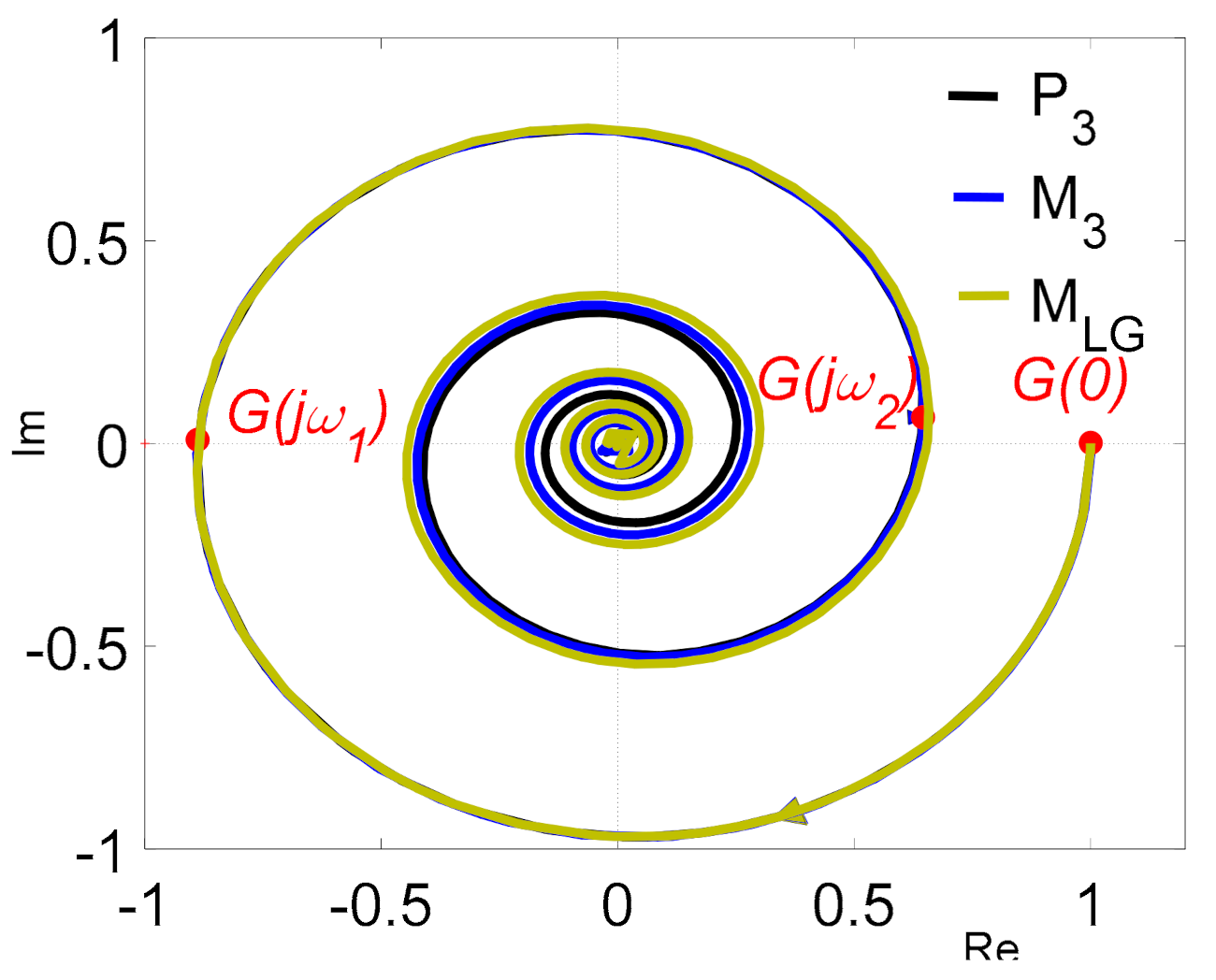
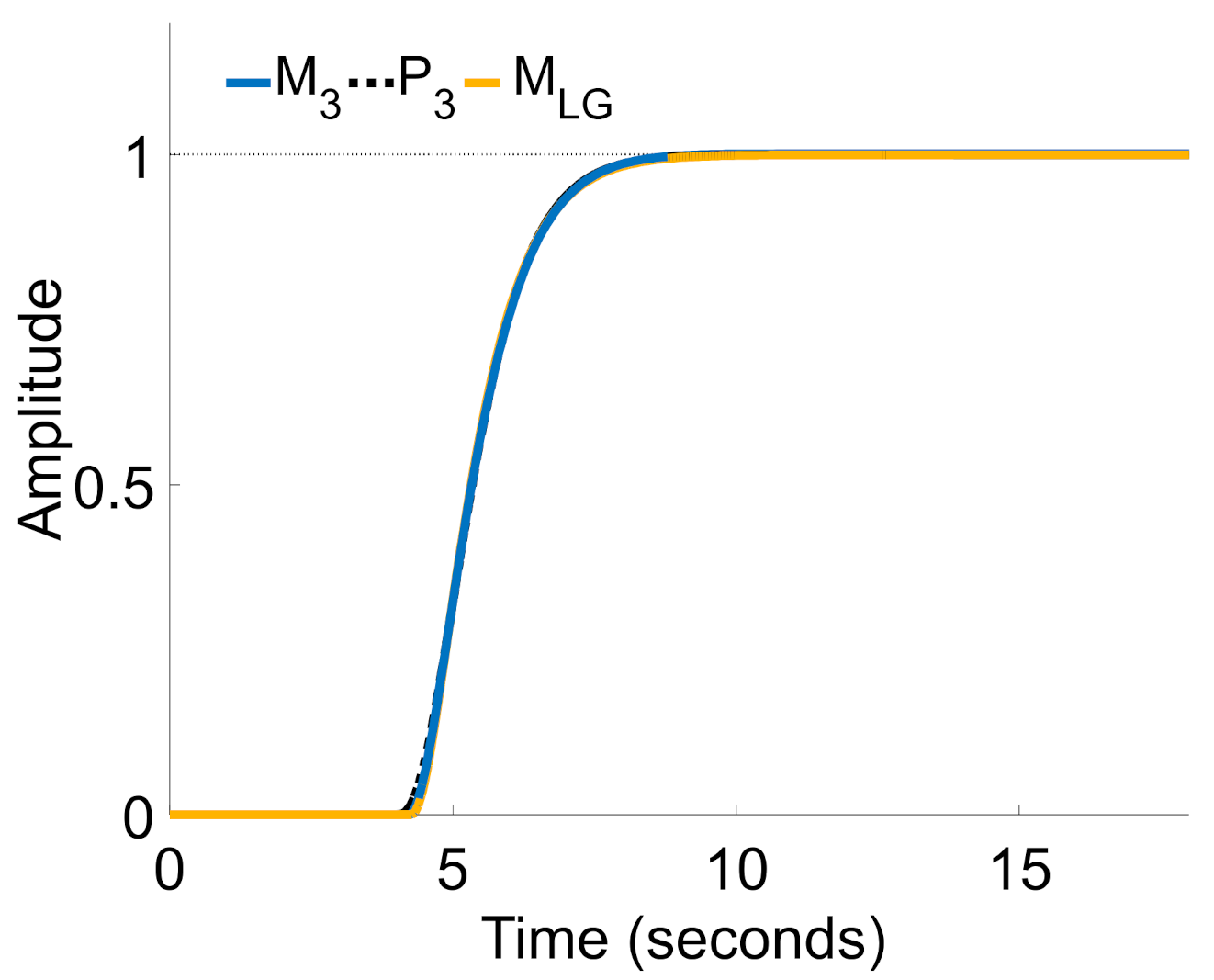
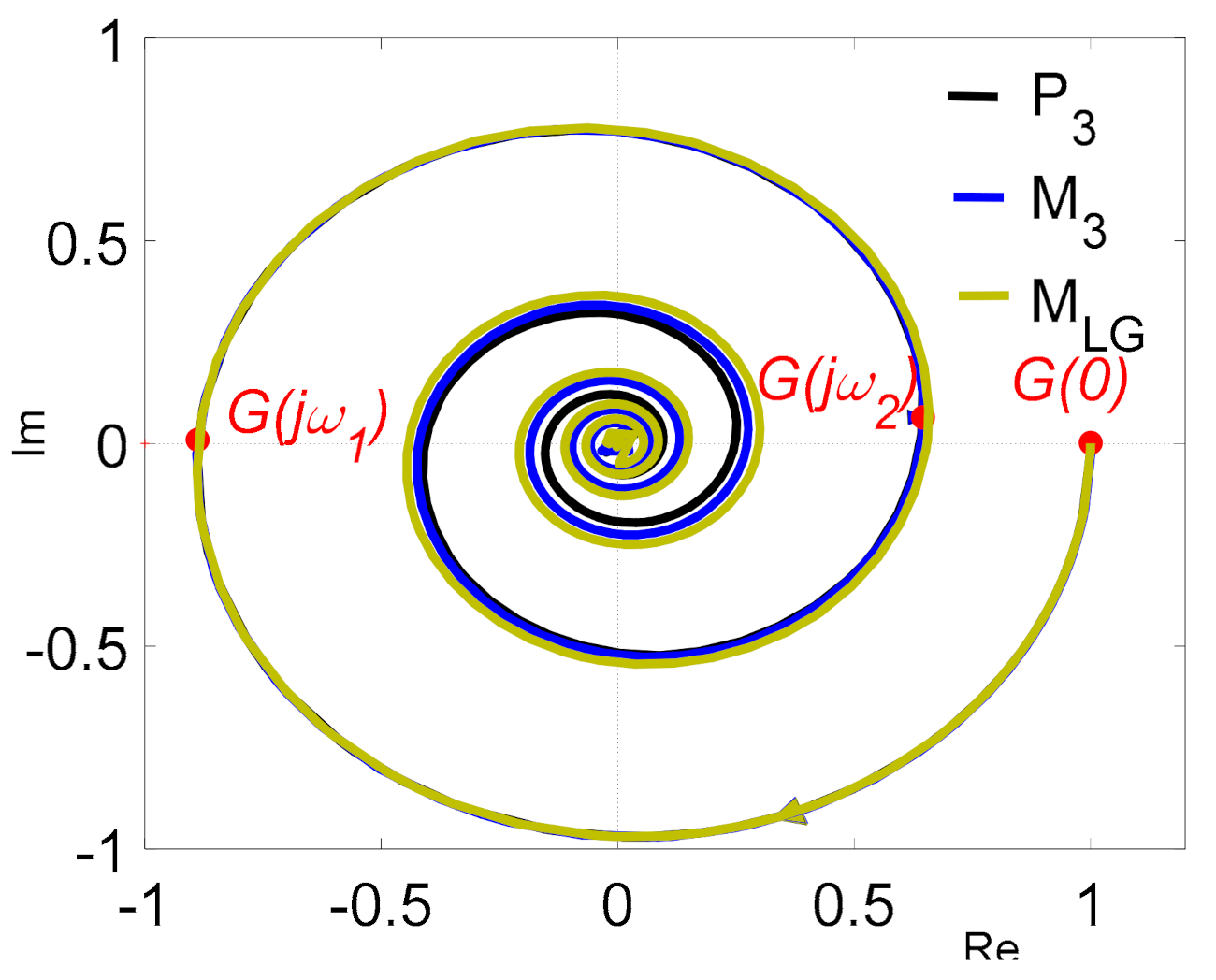
7.3. PID Control of Process P3
8. Verification and Implementation
9. Conclusions
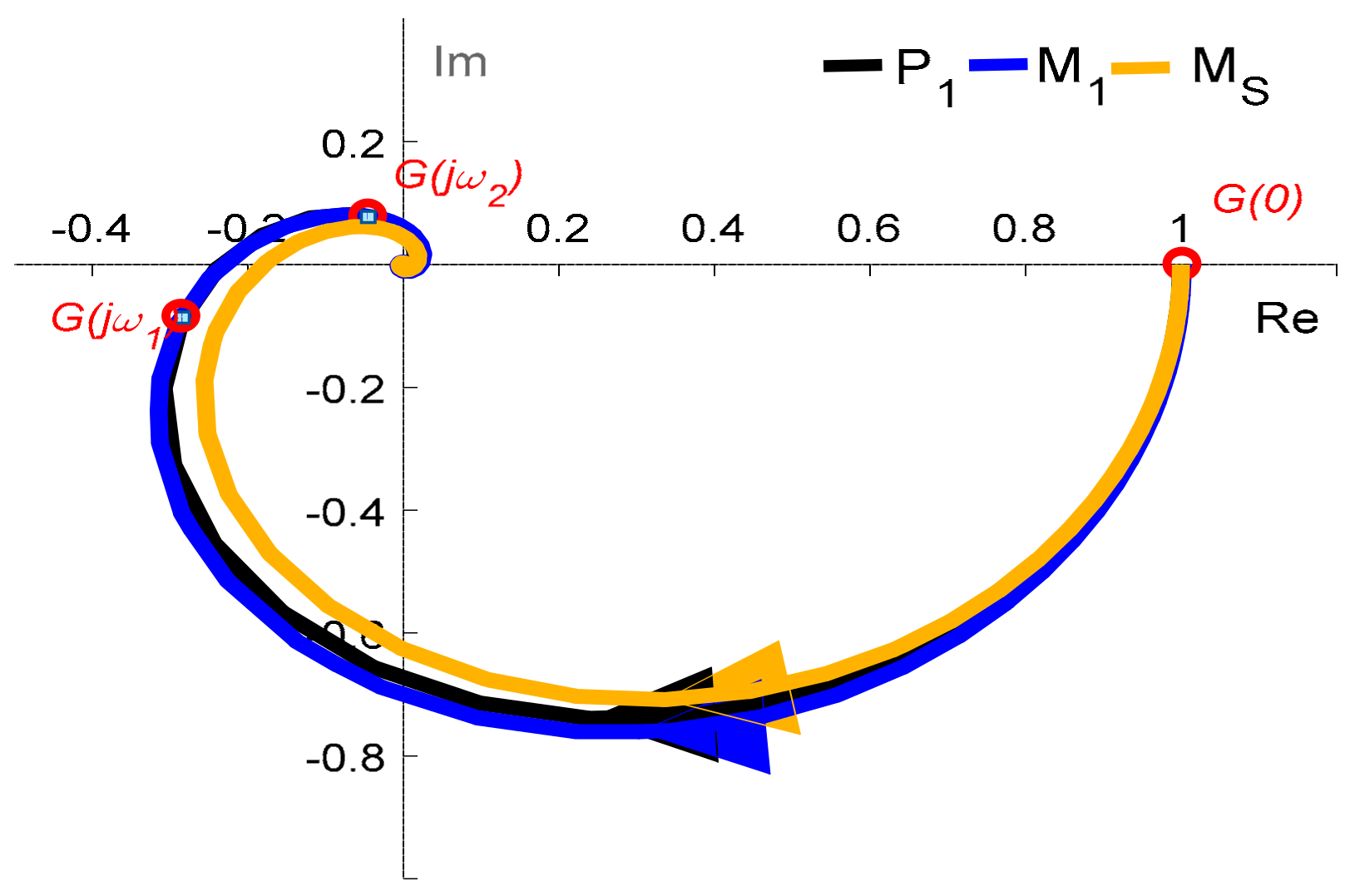
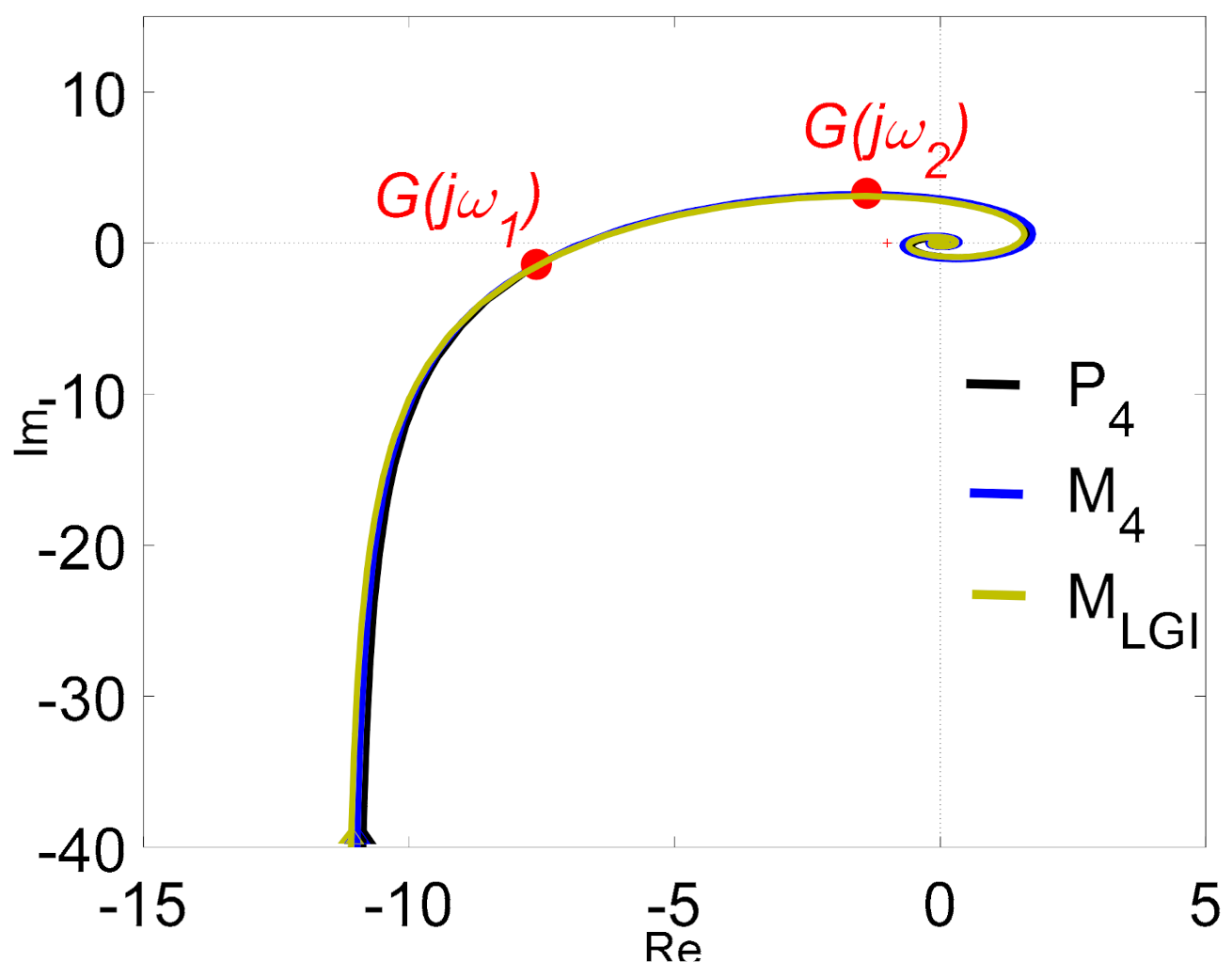
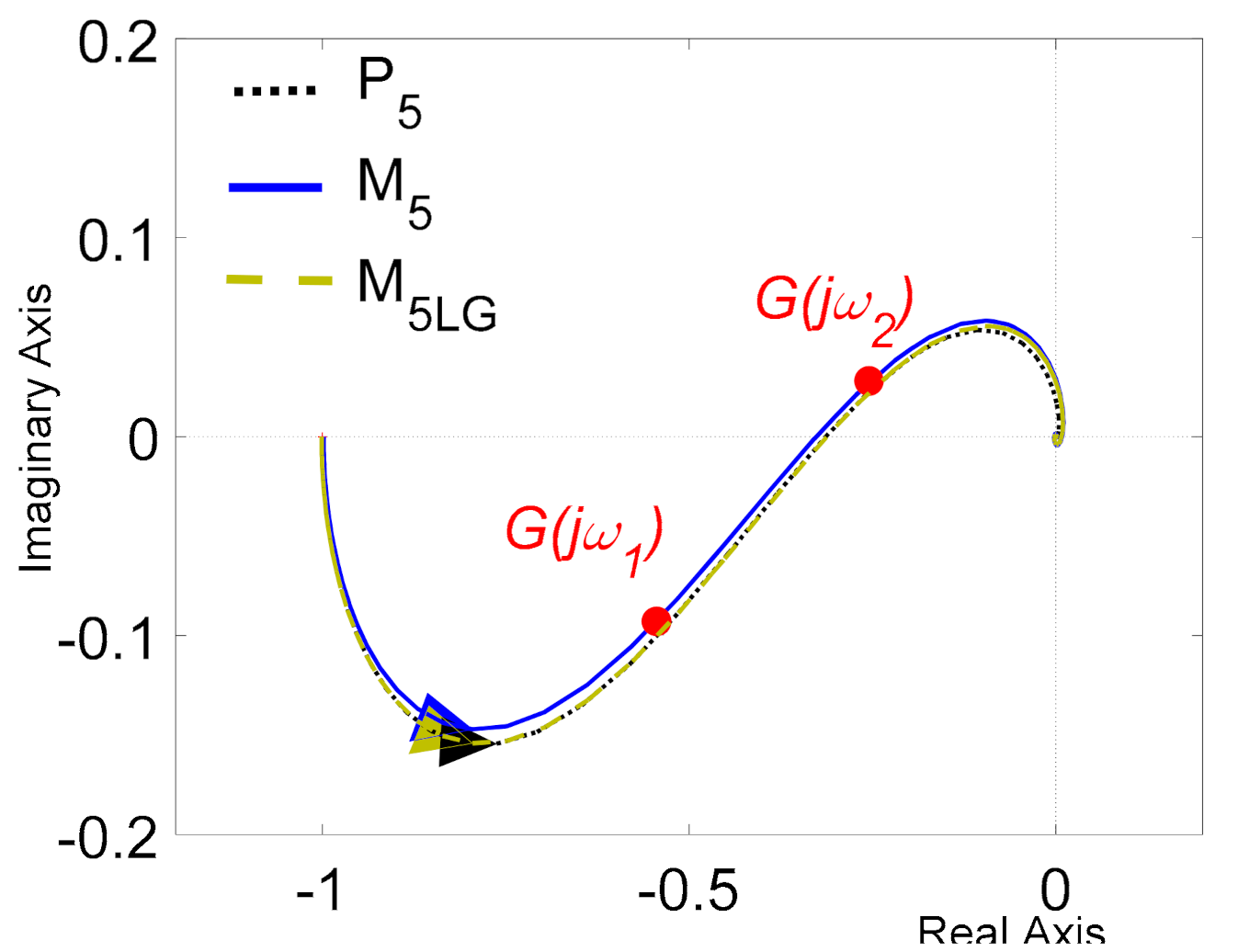
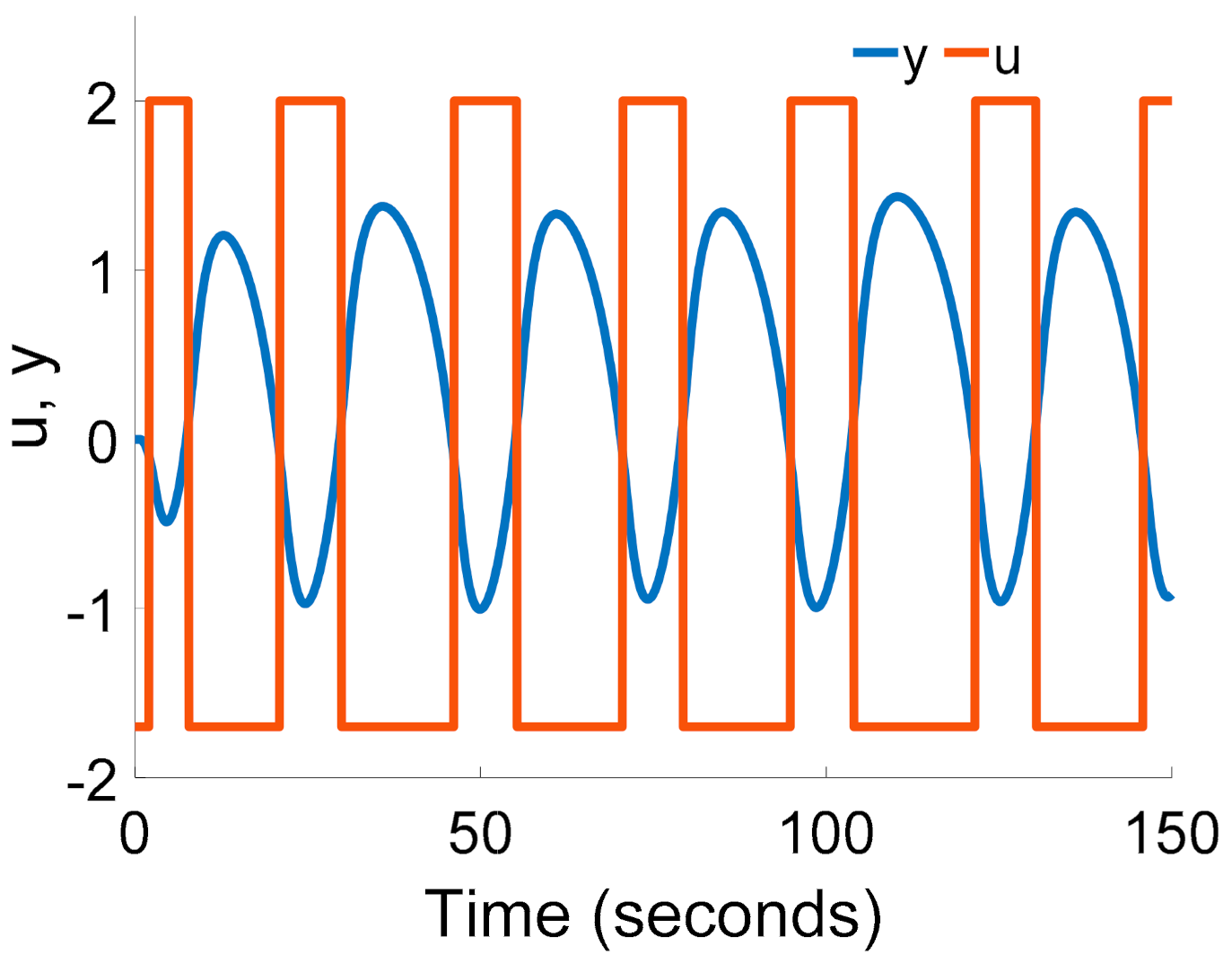
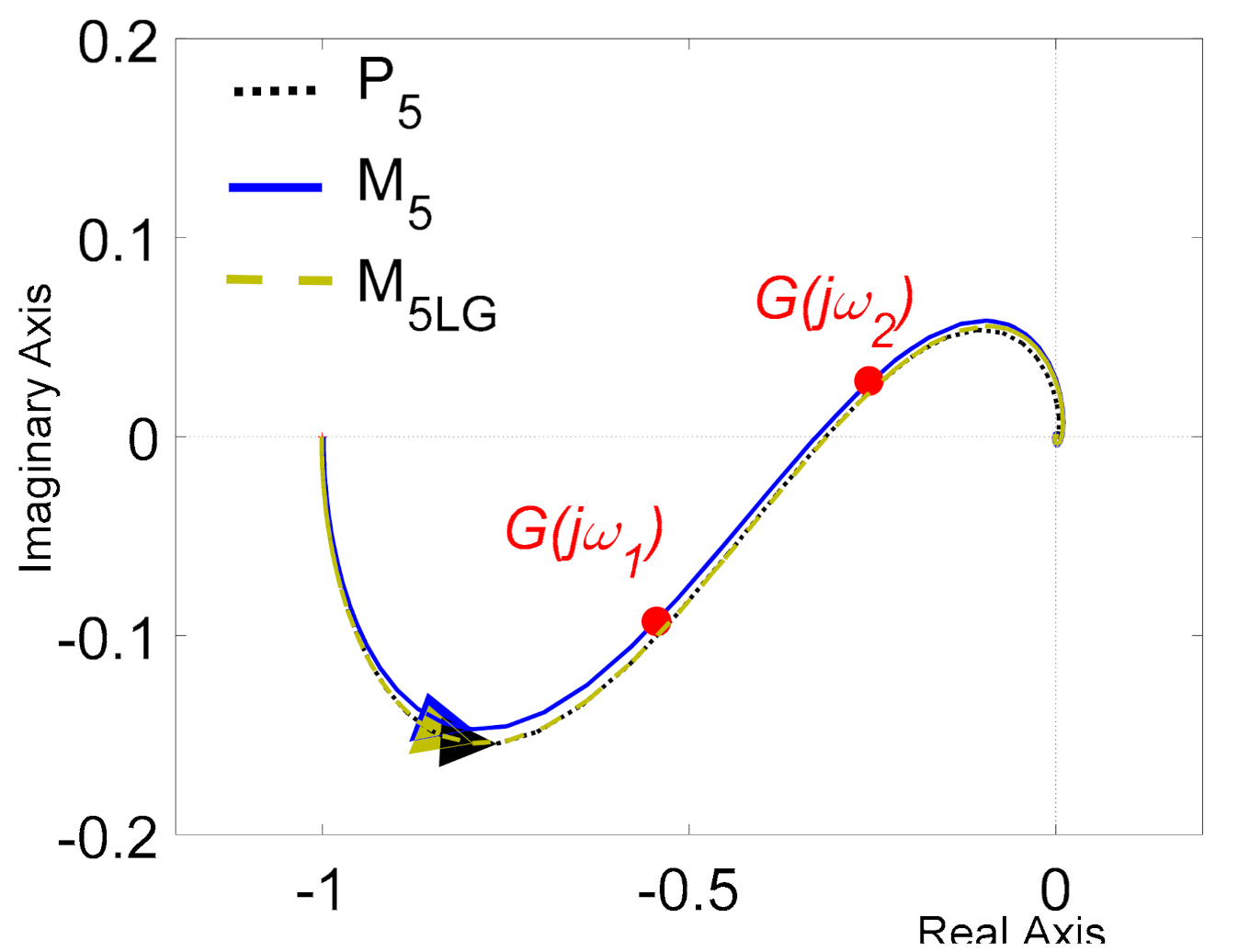
- The frequency points G(jωi), i = 1, 2, N are determined from one relay feedback test without any prior knowledge of the model.
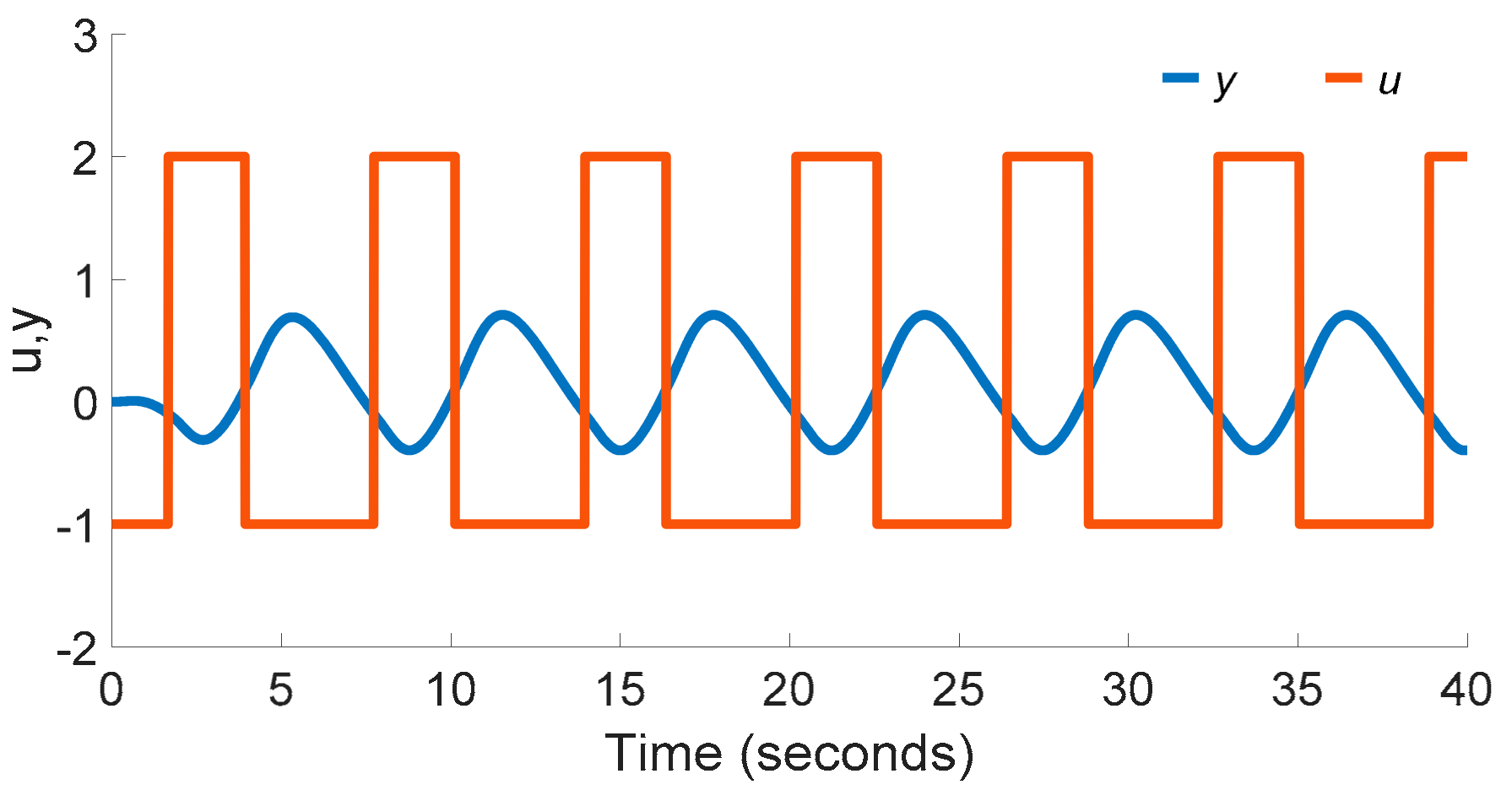
- The relay shifting method is very versatile, the same procedure can be used for the model parameter estimation of stable/unstable/integrating, non-oscillatory/oscillatory, and lag/delay dominated processes and the noisy environment if there are stable oscillations for the relay feedback test.
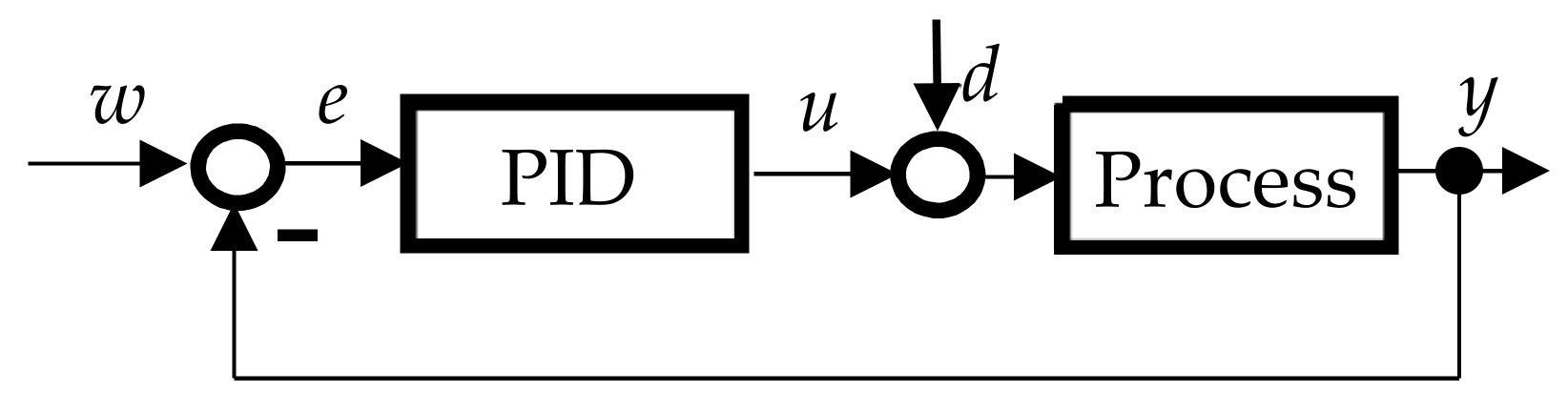
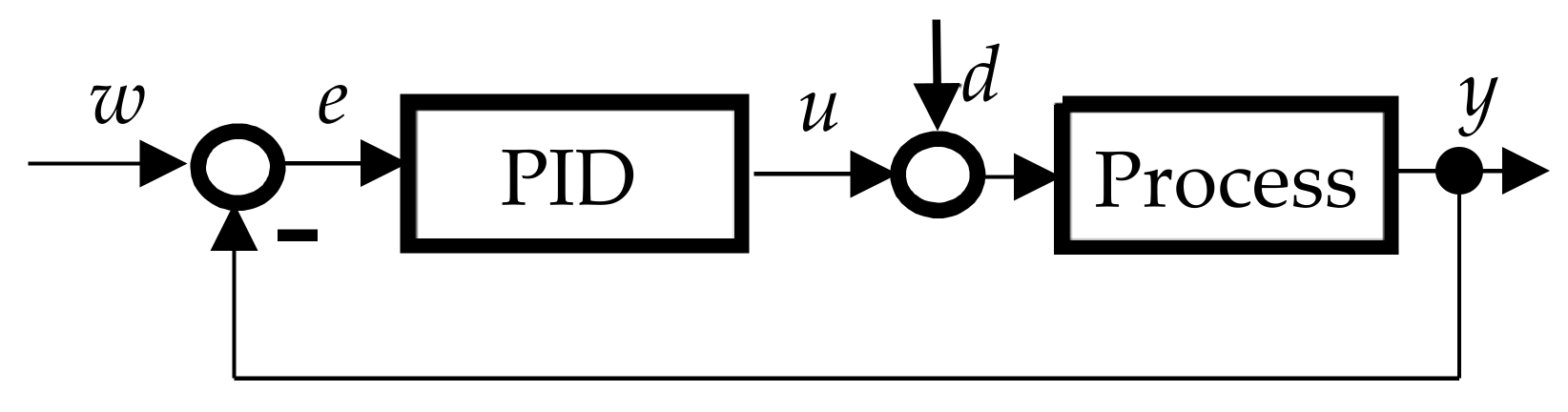
- The static load disturbance has no effect on the locations of the frequency points G(jωi), i = 1, 2, N.
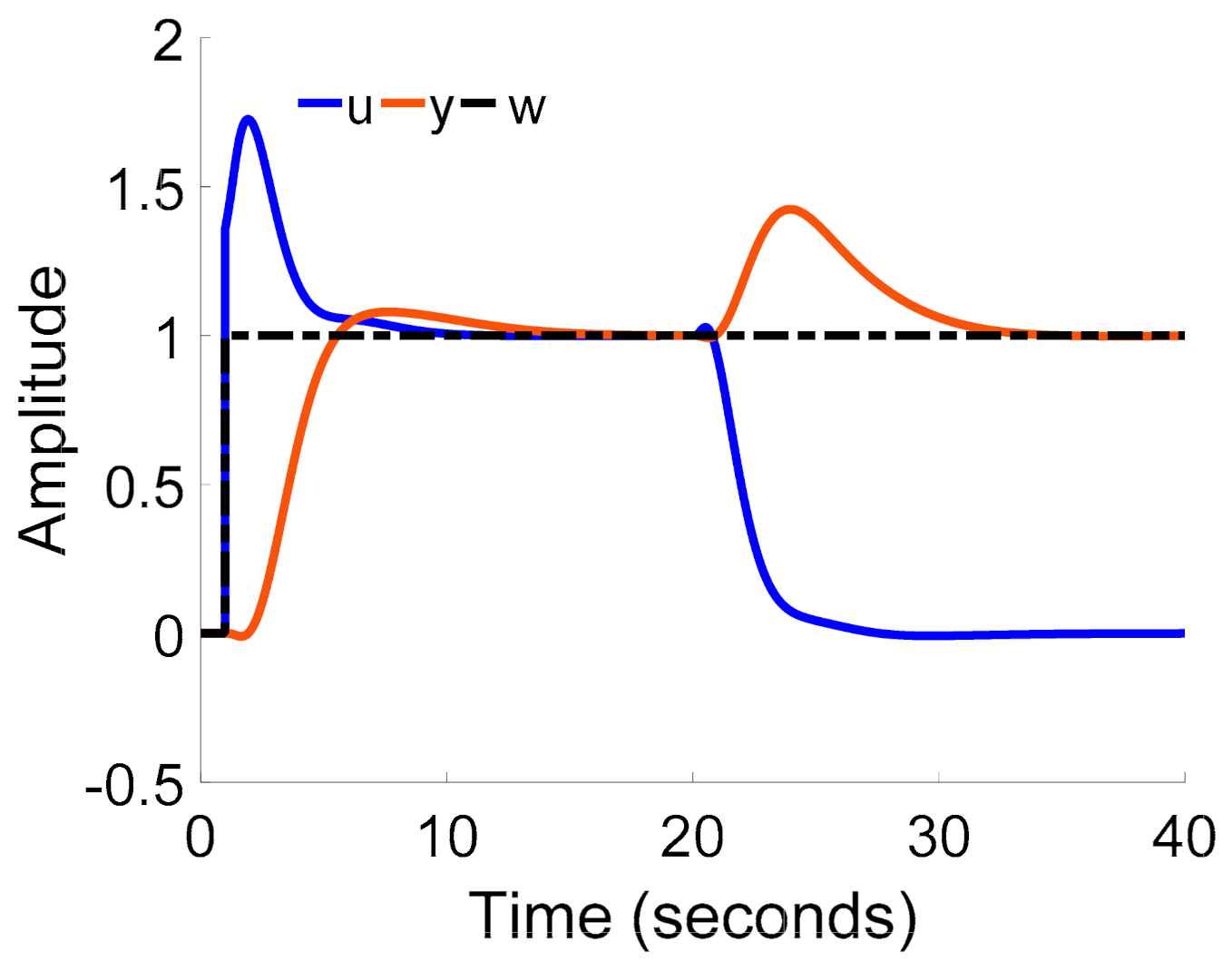
- By using the SOTD model, it is possible to estimate the steady-state gain even in the presence of a constant load disturbance.
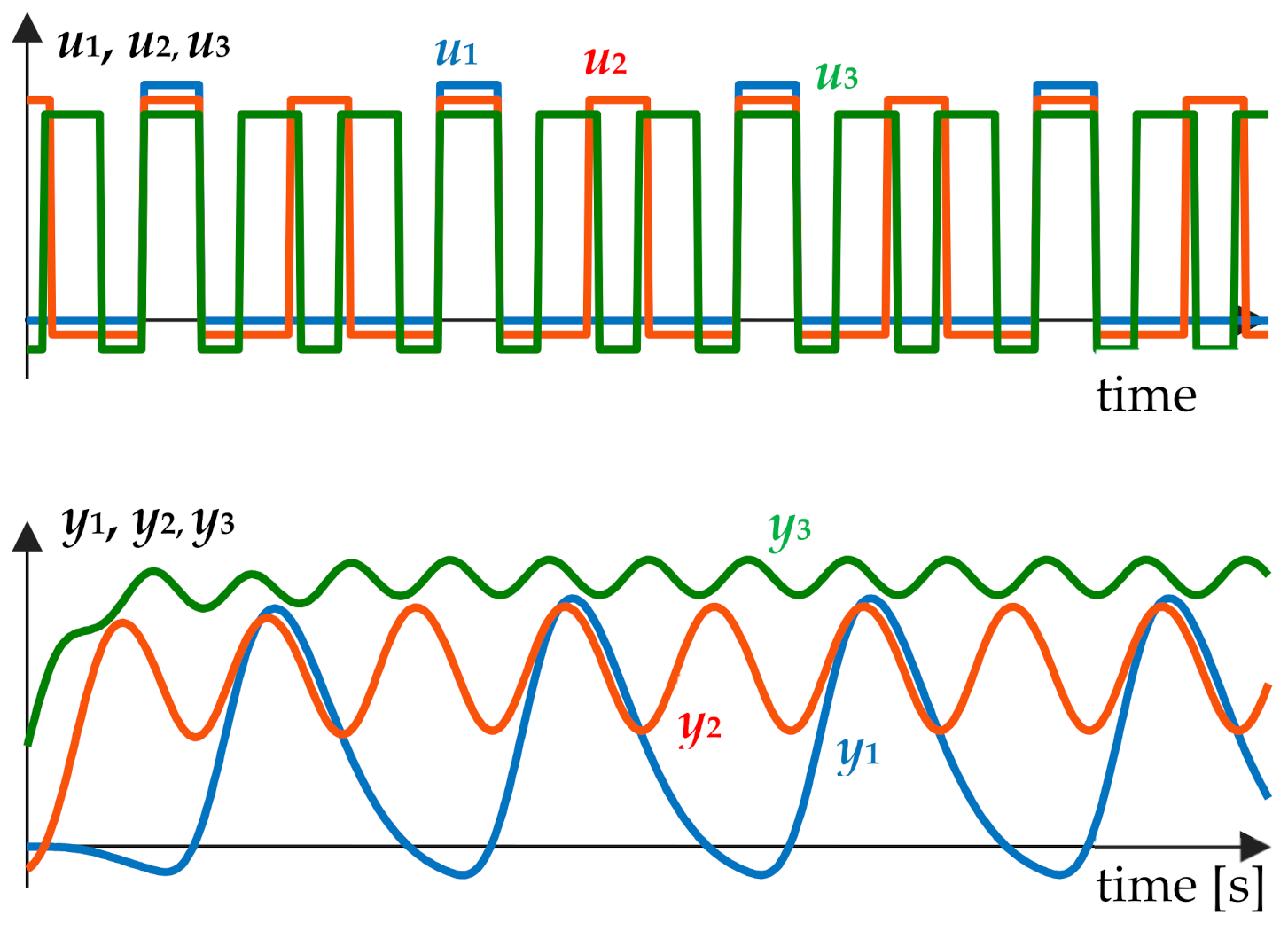
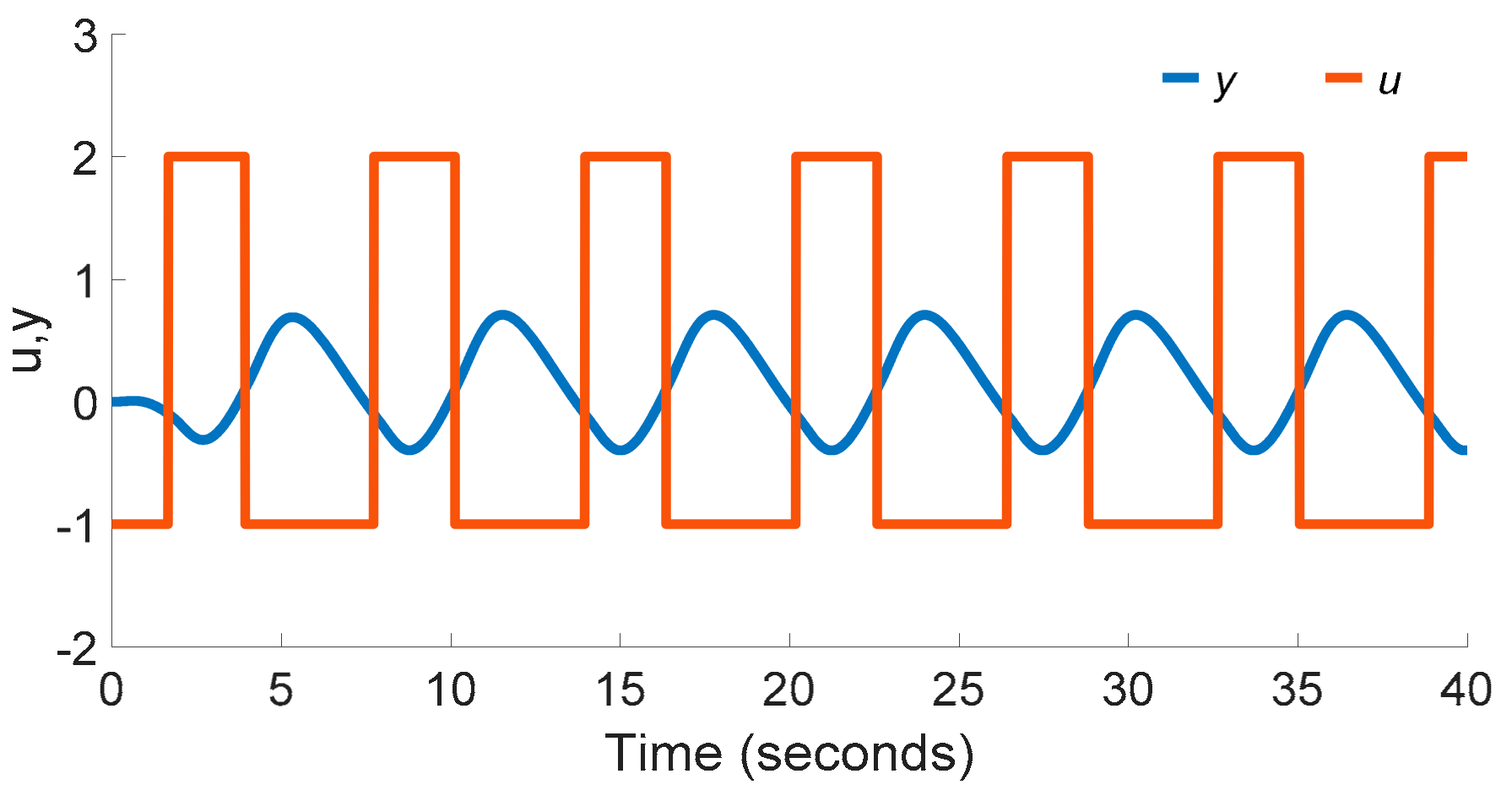
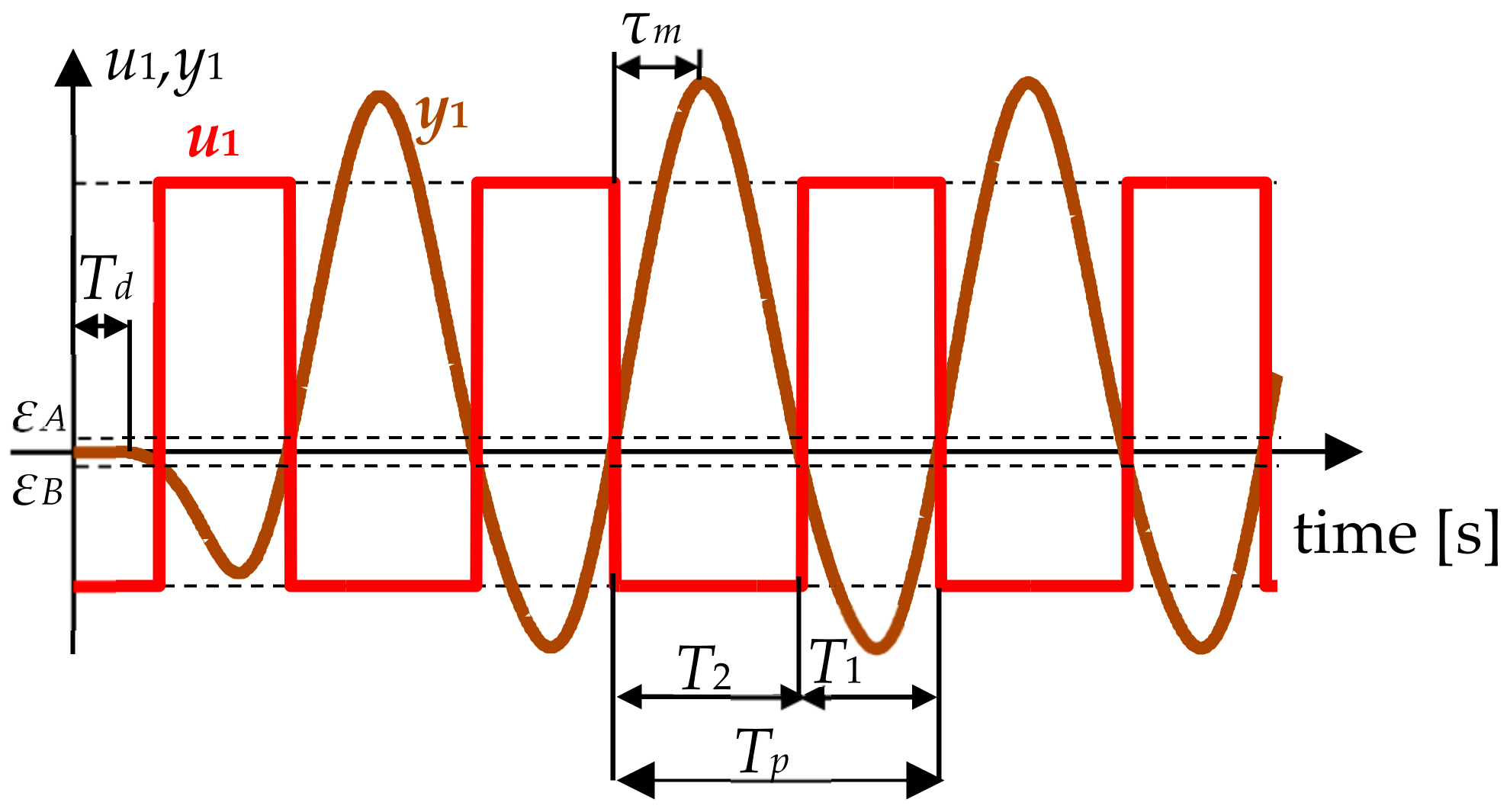
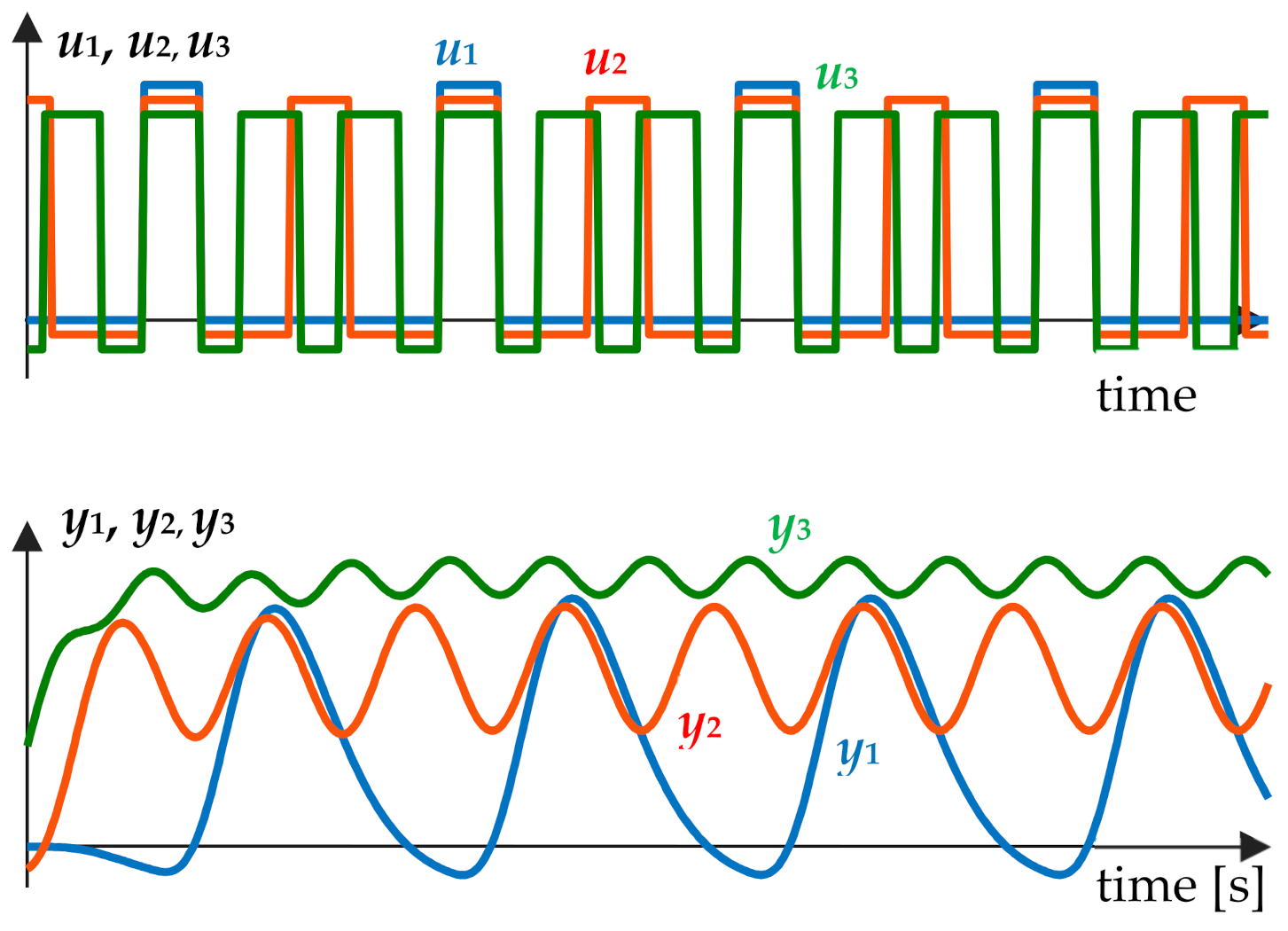
- The shifting filter described by (1) and (2) filters out the lower harmonics and amplifies the n-th harmonic, and the frequency response point G(jωn) can be determined by relation (5) or by using the approximation of the periodic signals un(t) and yn(t) by harmonic functions.
- The relay shifting filter helps to eliminate parasitic signals.
- The relay shifting method is appropriate only for processes describable by linear time-invariant models.
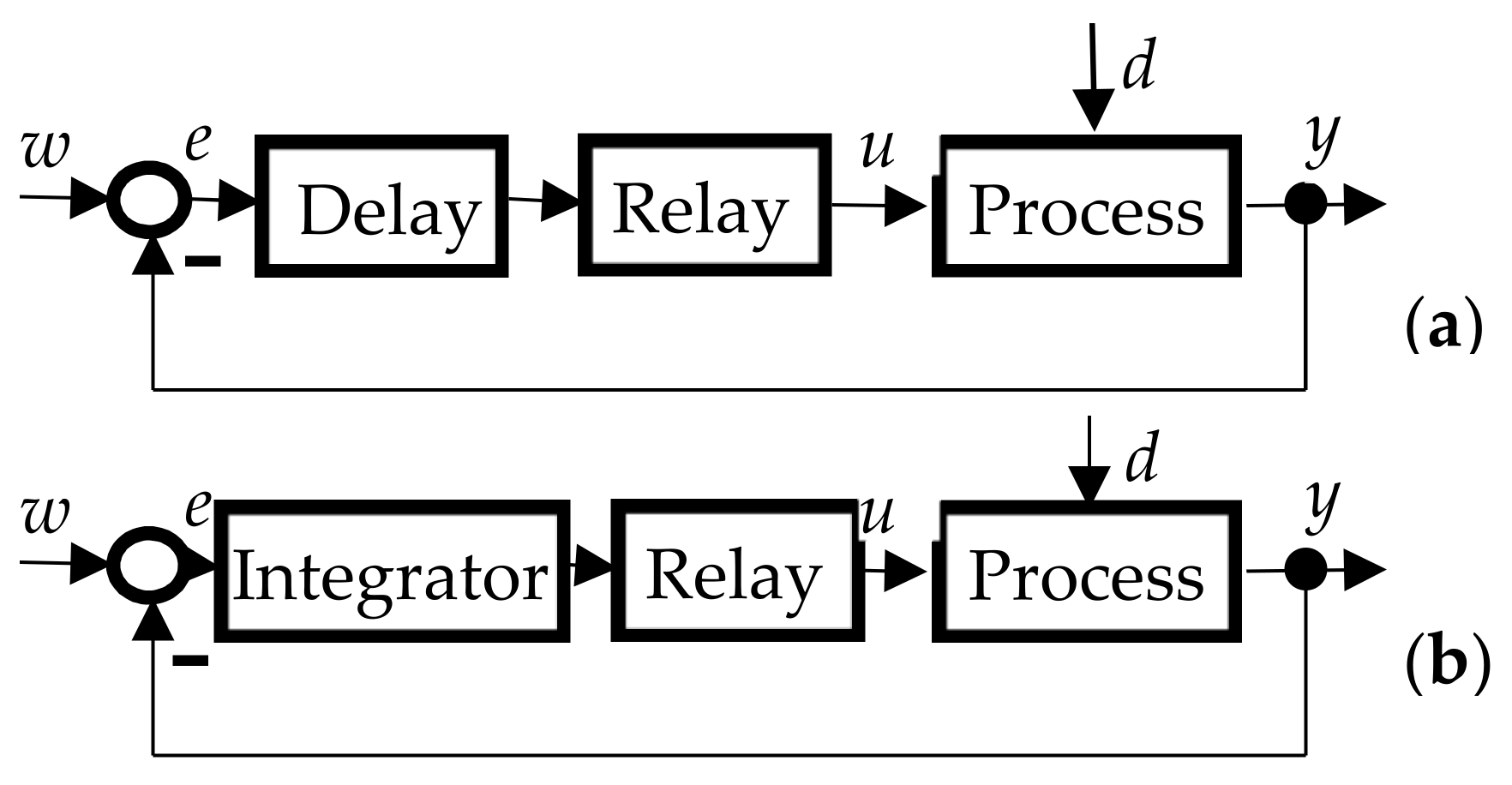
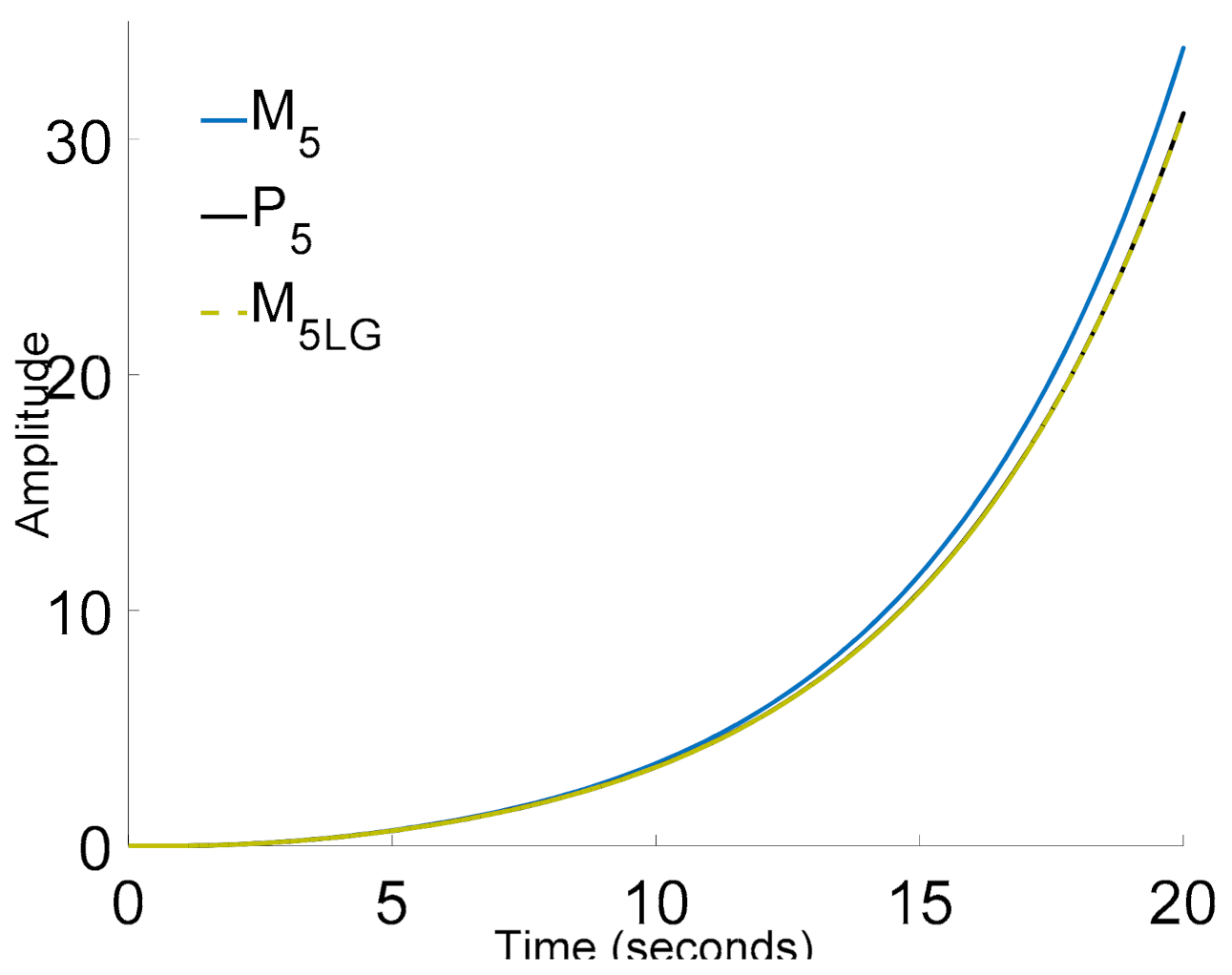
- The position of the points G(jωi), i = 1, 2, …, N significantly affects the estimation of the model parameters. An additional integrator or a delay helps to improve the parameter estimation.
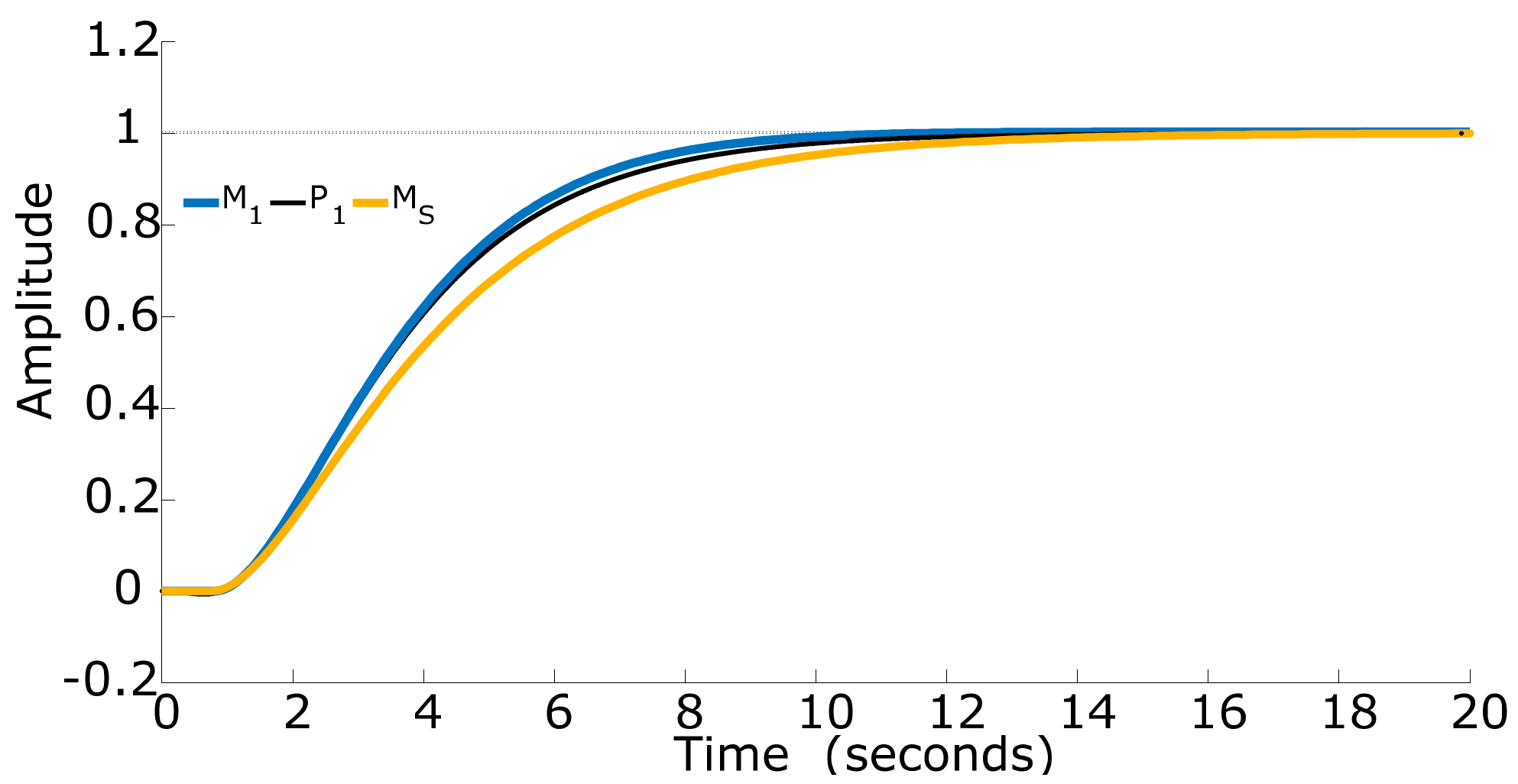
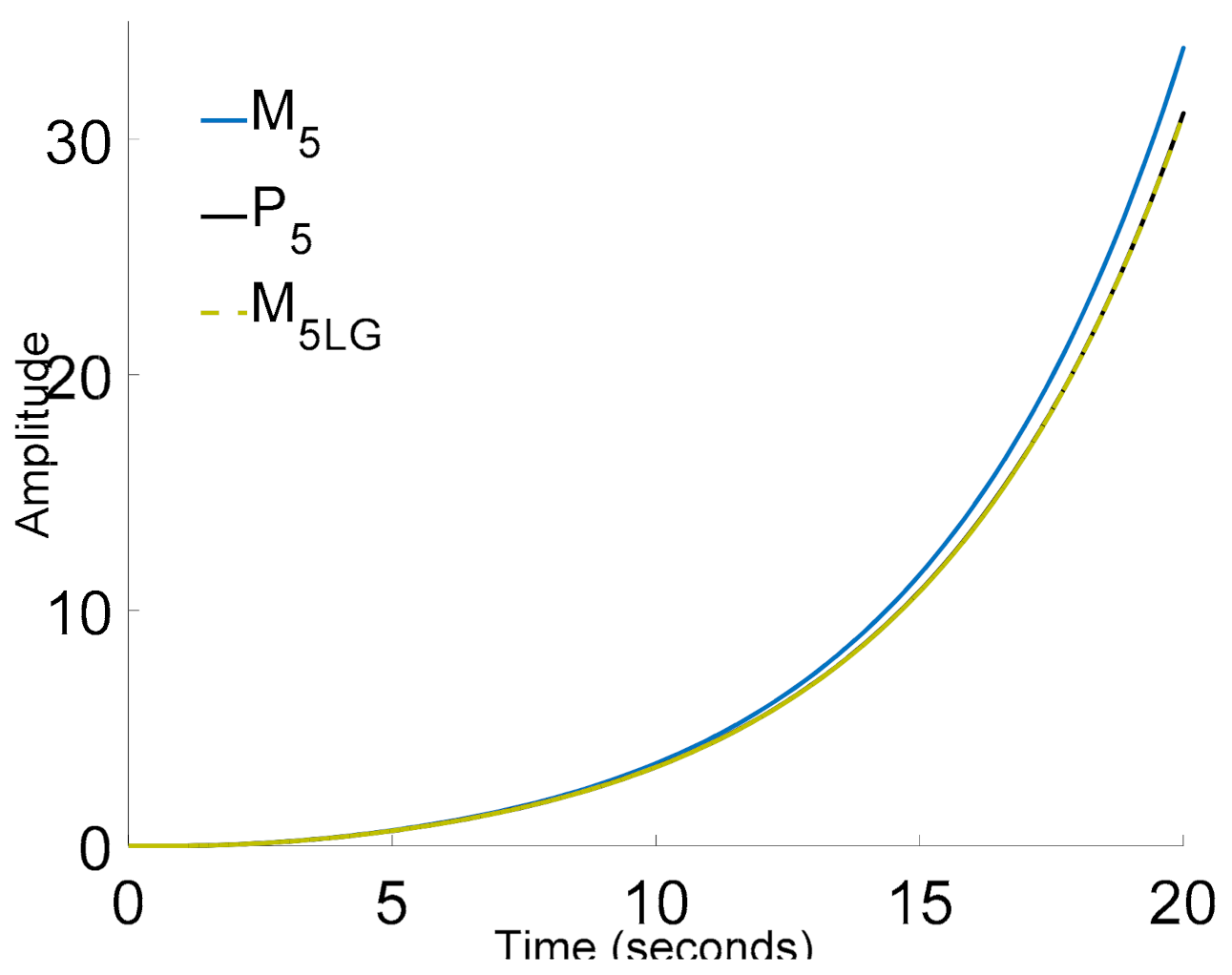
- Using the SOTD model, it is possible to model processes that can be described by high-order models.
- The relay shifting method is primarily suggested for the automatic tuning of controllers.
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Rotač, V.J. Rasčet Nastrojki Promyšlenych Sistem Regulirovanija; Gosenergoizdat: Moskva, Russia, 1961. [Google Scholar]
- Åström, K.J.; Hägglund, T. Automatic Tuning of Simple Regulators with Specifications on Phase and Amplitude Margins. Automatica 1984, 20, 645–651. [Google Scholar] [CrossRef] [Green Version]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002; ISBN 978-0-13-067389-3. [Google Scholar]
- Ziegler, J.G.; Nichols, N.B. Optimum Settings for Automatic Controllers. Trans. ASME 1942, 64, 759–768. [Google Scholar] [CrossRef]
- Luyben, W.L. Derivation of Transfer Functions for Highly Nonlinear Distillation Columns. Ind. Eng. Chem. Res. 1987, 26, 2490–2495. [Google Scholar] [CrossRef]
- Shen, S.-H.; Wu, J.-S.; Yu, C.-C. Use of Biased-Relay Feedback for System Identification. AIChE J. 1996, 42, 1174–1180. [Google Scholar] [CrossRef]
- Li, W.; Eskinat, E.; Luyben, W.L. An Improved Autotune Identification Method. Ind. Eng. Chem. Res. 1991, 30, 1530–1541. [Google Scholar] [CrossRef]
- Bi, Q.; Wang, Q.-G.; Hang, C.-C. Relay-Based Estimation of Multiple Points on Process Frequency Response. Automatica 1997, 33, 1753–1757. [Google Scholar] [CrossRef]
- Chidambaram, M.; Sathe, V. Relay Autotuning for Identification and Control; Cambridge University Press: Cambridge, UK, 2014; ISBN 978-1-107-41596-6. [Google Scholar]
- Liu, T.; Wang, Q.-G.; Huang, H.-P. A Tutorial Review on Process Identification from Step or Relay Feedback Test. J. Process. Control 2013, 23, 1597–1623. [Google Scholar] [CrossRef]
- Liu, T.; Gao, F. Industrial Process Identification and Control Design: Step-Test and Relay-Experiment-Based Methods. In Advances in Industrial Control; Springer: London, UK, 2011. [Google Scholar]
- Dharmalingam, K.; Thangavelu, T. Parameter Estimation Using Relay Feedback. Rev. Chem. Eng. 2019, 35, 505–529. [Google Scholar] [CrossRef]
- Yu, C.C. Autotuning of PID Controllers; Springer: London, UK, 2006; ISBN 978-1-84628-036-8. [Google Scholar]
- Ruderman, M. Relay Feedback Systems—Established Approaches and New Perspectives for Application. IEEJ J. IA 2019, 8, 271–278. [Google Scholar] [CrossRef] [Green Version]
- Sánchez Moreno, J.; Dormido Bencomo, S.; Díaz Martínez, J.M. Fitting of Generic Process Models by an Asymmetric Short Relay Feedback Experiment—The n-Shifting Method. Appl. Sci. 2021, 11, 1651. [Google Scholar] [CrossRef]
- Vivek, S.; Chidambaram, M. Identification Using Single Symmetrical Relay Feedback Test. Comput. Chem. Eng. 2005, 29, 1625–1630. [Google Scholar] [CrossRef]
- Hofreiter, M. Extension of Relay Feedback Identification. In Proceedings of the 2015 7th International Congress on Ultra Modern Telecommunications and Control Systems and Workshops (ICUMT), Brno, Czech Republic, 6–8 October 2015; pp. 61–66. [Google Scholar]
- Hofreiter, M. Shifting Method for Relay Feedback Identification. IFAC-Pap. 2016, 49, 1933–1938. [Google Scholar] [CrossRef]
- Berner, J.; Hägglund, T.; Åström, K.J. Asymmetric Relay Autotuning—Practical Features for Industrial Use. Control Eng. Pract. 2016, 54, 231–245. [Google Scholar] [CrossRef]
- Berner, J.; Hagglund, T.; Astrom, K.J. Improved Relay Autotuning Using Normalized Time Delay. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 1869–1875. [Google Scholar]
- Seborg, D.E. Process Dynamics and Control, 3rd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2011; ISBN 978-0-470-12867-1. [Google Scholar]
- Skogestad, S. Simple Analytic Rules for Model Reduction and PID Controller Tuning. J. Process. Control 2003, 13, 291–309. [Google Scholar] [CrossRef] [Green Version]
- Novella-Rodríguez, D.F.; del Muro-Cuéllar, B.; Hernandez-Hernández, G.; Marquez-Rubio, J.F. Delayed Model Approximation and Control Design for Under-Damped Systems. IFAC-PapersOnLine 2017, 50, 1316–1321. [Google Scholar] [CrossRef]
- Hofreiter, M. Improved Relay Feedback Identification Using Shifting Method. In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics, Prague, Czech Republic, 29–31 July 2019; SCITEPRESS—Science and Technology Publications: Prague, Czech Republic, 2019; pp. 601–608. [Google Scholar]
- Åström, K.J.; Hägglund, T.; Åström, K.J. PID Controllers, 2nd ed.; International Society for Measurement and Control: Research Triangle Park, NC, USA, 1995; ISBN 978-1-55617-516-9. [Google Scholar]
- Skogestad, S.; Grimholt, C. The SIMC Method for Smooth PID Controller Tuning. PID Control in the Third Millennium: Lessons Learned and New Approaches. In Advances in Industrial Control; Springer: Berlin/Heidelberg, Germany, 2012; pp. 147–175. ISBN 978-1-4471-2424-5. [Google Scholar]
- O’Dwyer, A. Handbook of PI and PID Controller Tuning Rules, 3rd ed.; Imperial College Press: London, UK, 2009; ISBN 978-1-84816-242-6. [Google Scholar]
- Víteček, A.; Vítečková, M. Vysoká škola báňská—Technická univerzita Ostrava; Katedra automatizační techniky a řízení. In Closed-Loop Control of Mechatronic Systems; VŠB—Technical University of Ostrava: Ostrava, Czech Republic, 2013; ISBN 978-80-248-3149-7. [Google Scholar]
- Landau, Y.D.; Zito, G. Digital Control Systems: Design, Identification and Implementation; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010; ISBN 978-1-84996-551-4. [Google Scholar]
- Hornychová, A.; Hofreiter, M. Use of the Shifting Method Results for PID Controllers Parameters Estimation. MATEC Web Conf. 2019, 292, 01017. [Google Scholar] [CrossRef]
- Hofreiter, M. Relay Feedback Identification with Additional Integrator. IFAC-PapersOnLine 2019, 52, 66–71. [Google Scholar] [CrossRef]
- Hornychova, A.; Hofreiter, M. Relay Feedback Identification Method for PID Controller Tuning. In Proceedings of the 2020 21th International Carpathian Control Conference (ICCC), High Tatras, Slovakia, 27–29 October 2020; pp. 1–6. [Google Scholar]
- TECO Advanced Automation PLC Tecomat Foxtrot; TECO a.s.: Kolín, Czech Republic, 2021; Available online: https://www.Tecomat.Com/Products/Cat/Cz/Plc-Tecomat-Foxtrot-3/ (accessed on 2 March 2021).
- Vaněk, J.; Slabý, J. Computing of PID Parameters Using Tecomat Foxtrot and the Asymmetrical Relay Shifting. In Proceedings of the New Methods and Practices in the Instrumentation, Automatic Control and Informatics 2020; CTU in Prague: Lobeč, Czech Republic, 2020; pp. 24–32. [Google Scholar]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hofreiter, M. Relay Identification Using Shifting Method for PID Controller Tuning. Energies 2021, 14, 5945. https://doi.org/10.3390/en14185945
Hofreiter M. Relay Identification Using Shifting Method for PID Controller Tuning. Energies. 2021; 14(18):5945. https://doi.org/10.3390/en14185945
Chicago/Turabian StyleHofreiter, Milan. 2021. "Relay Identification Using Shifting Method for PID Controller Tuning" Energies 14, no. 18: 5945. https://doi.org/10.3390/en14185945
APA StyleHofreiter, M. (2021). Relay Identification Using Shifting Method for PID Controller Tuning. Energies, 14(18), 5945. https://doi.org/10.3390/en14185945