
Dynamic Voltage Stability Assessment in Remote Island Power System with Renewable Energy Resources and Virtual Synchronous Generator

 , , ,
, , ,  ,
, 


Abstract
:1. Introduction
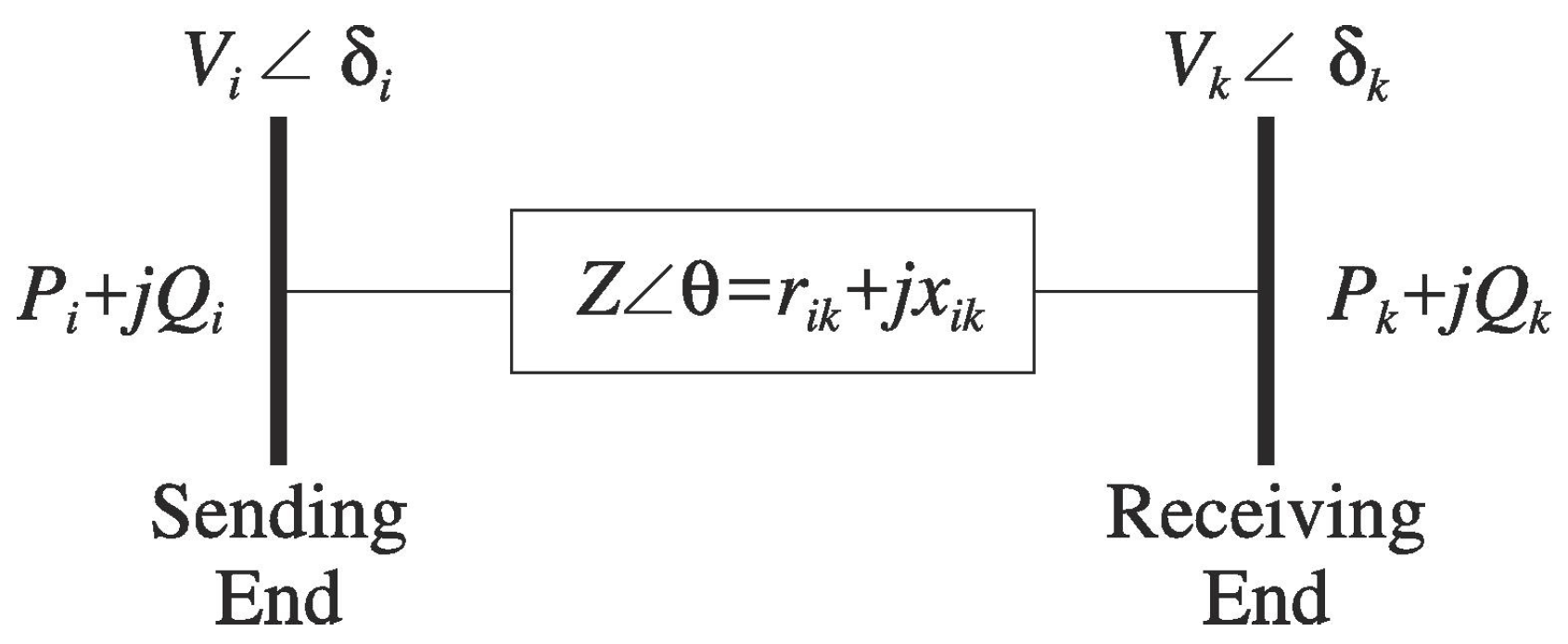
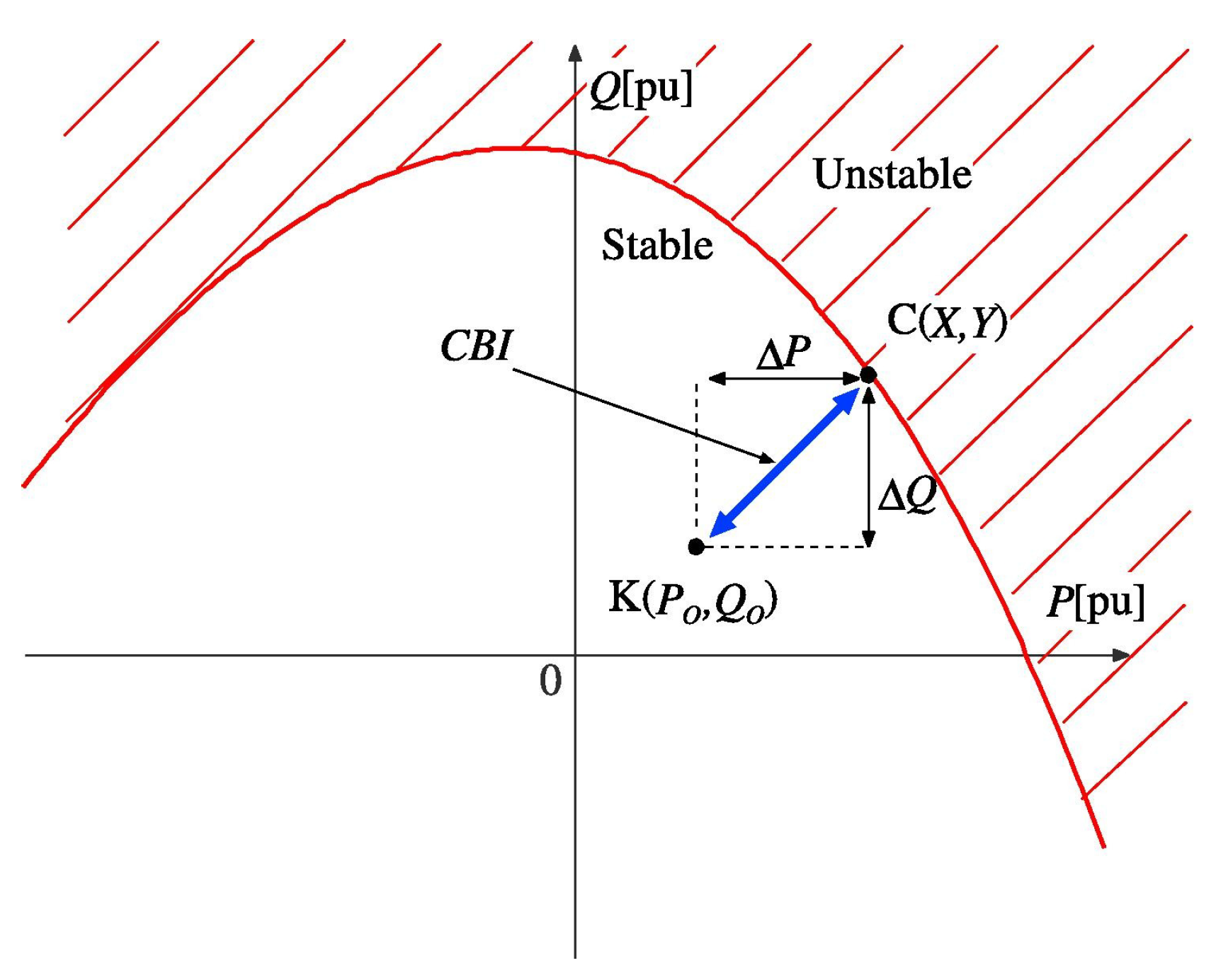
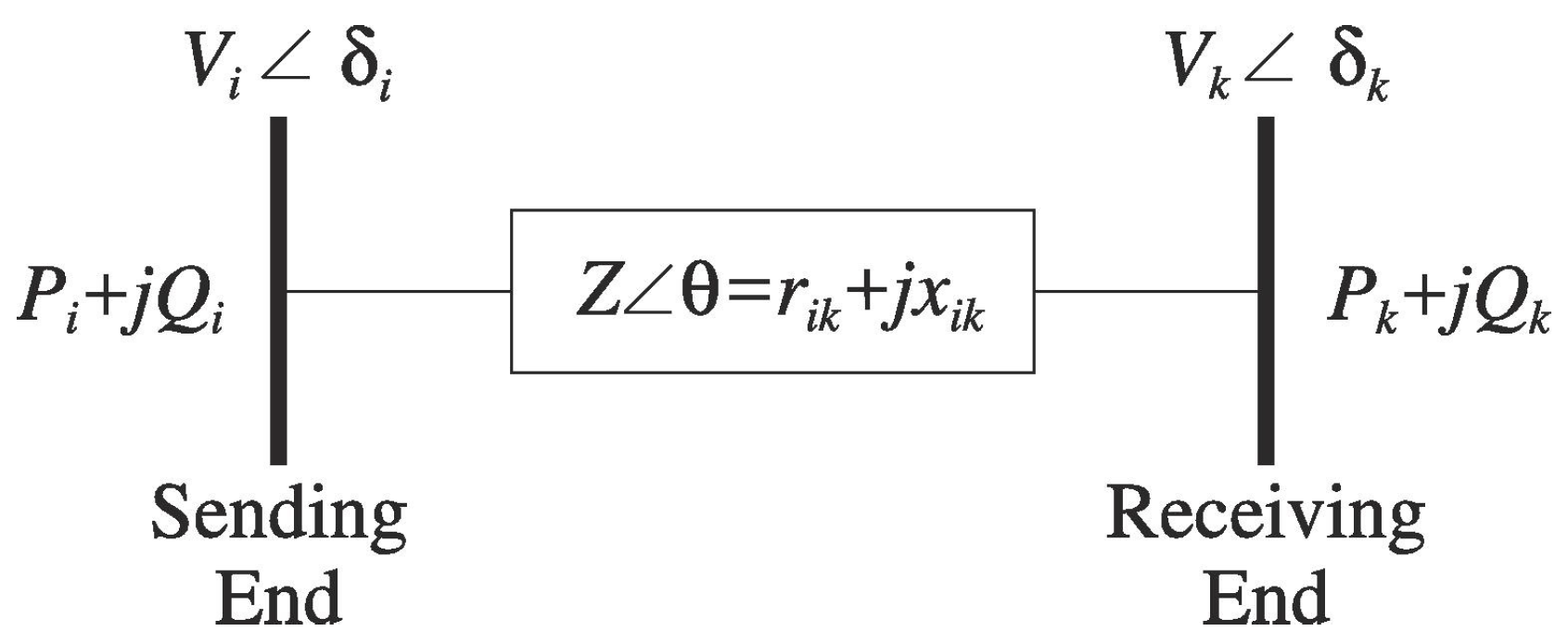
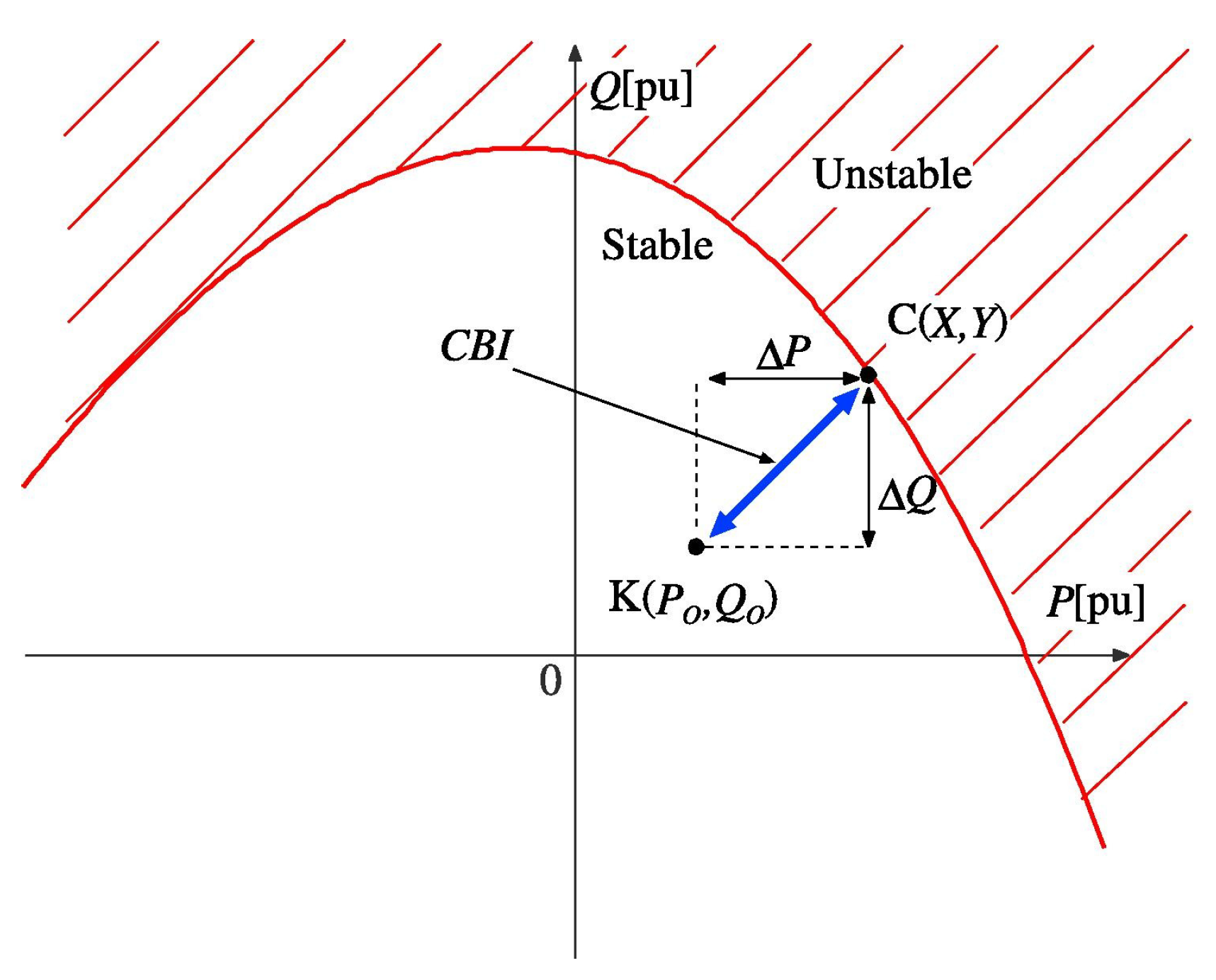
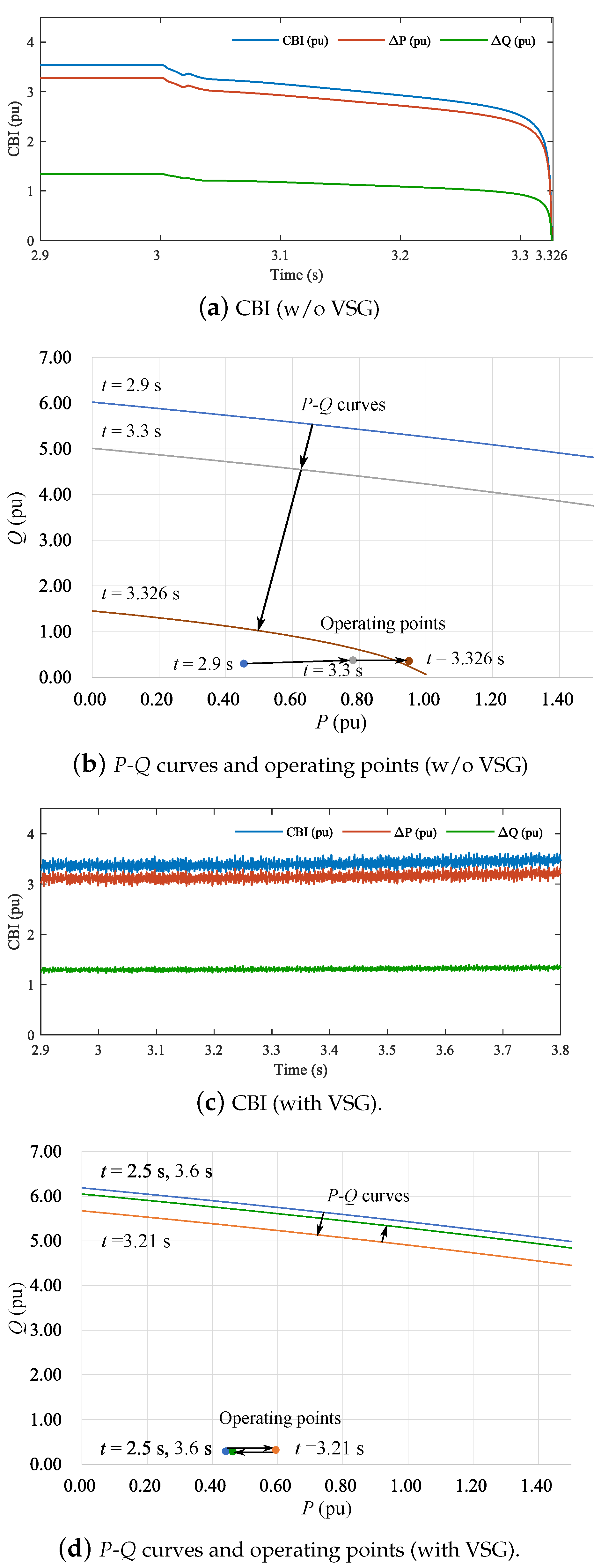
2. Critical Boundary Index (CBI)
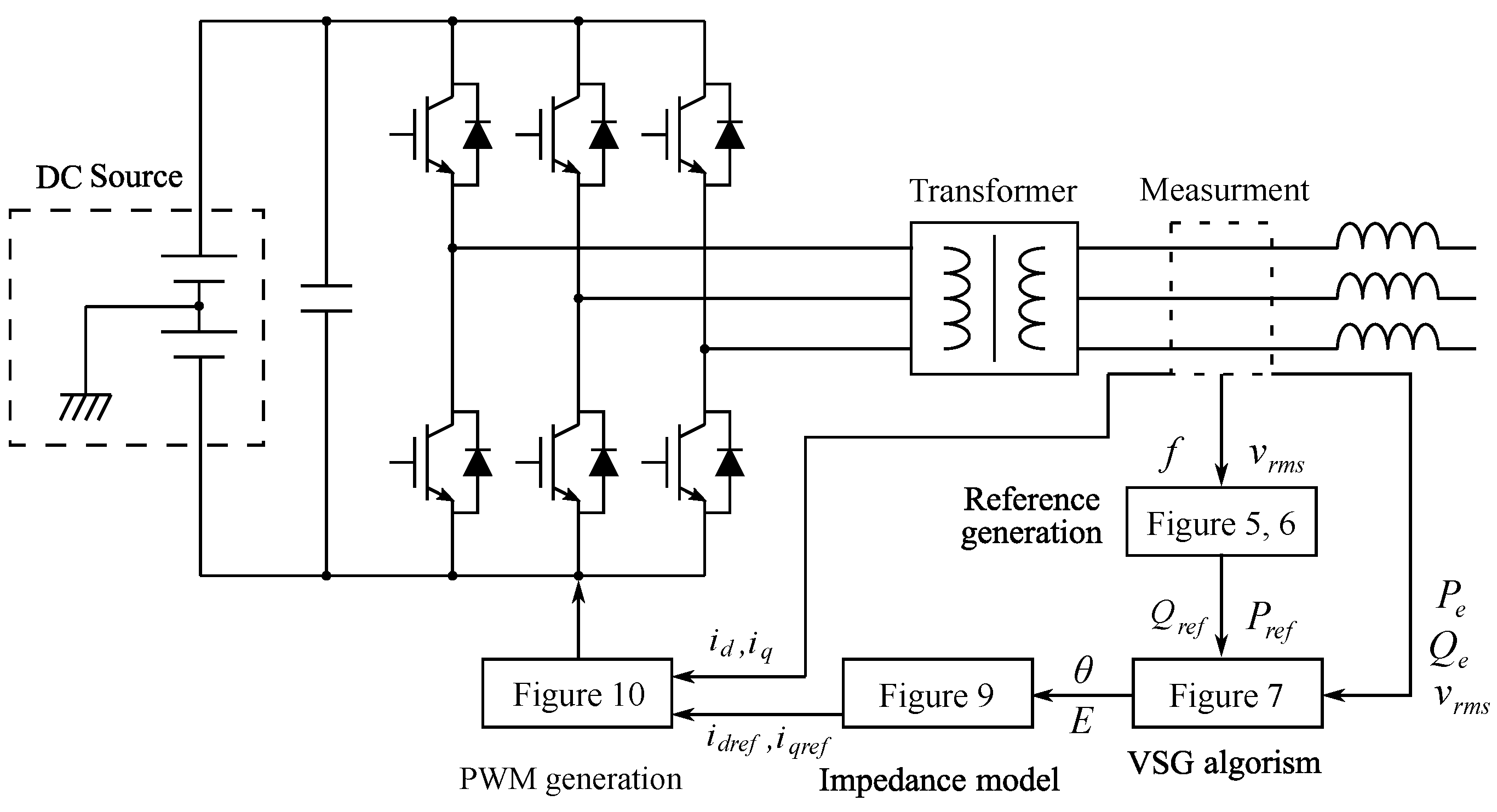
3. Virtual Synchronous Generator Model
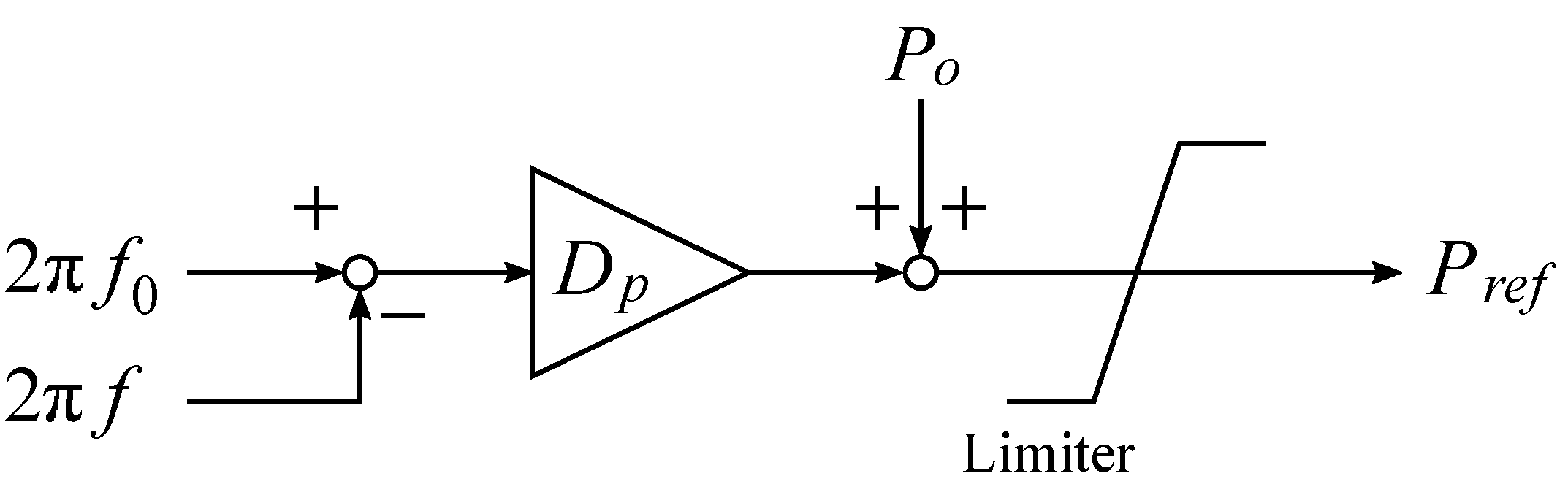
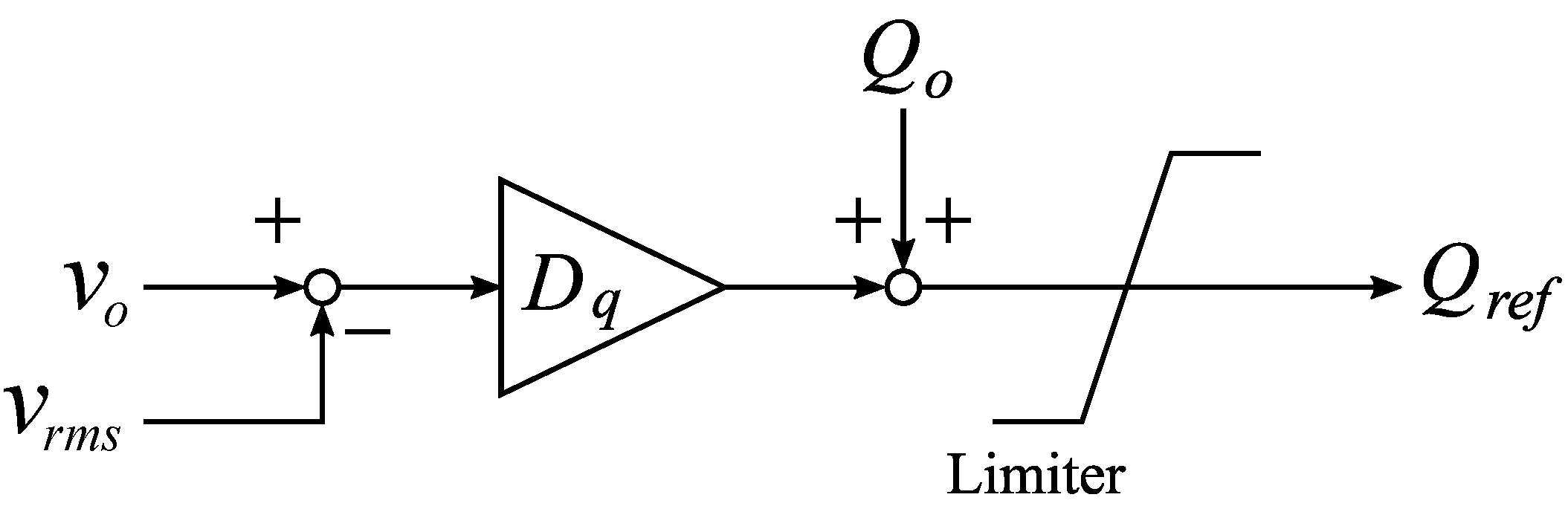
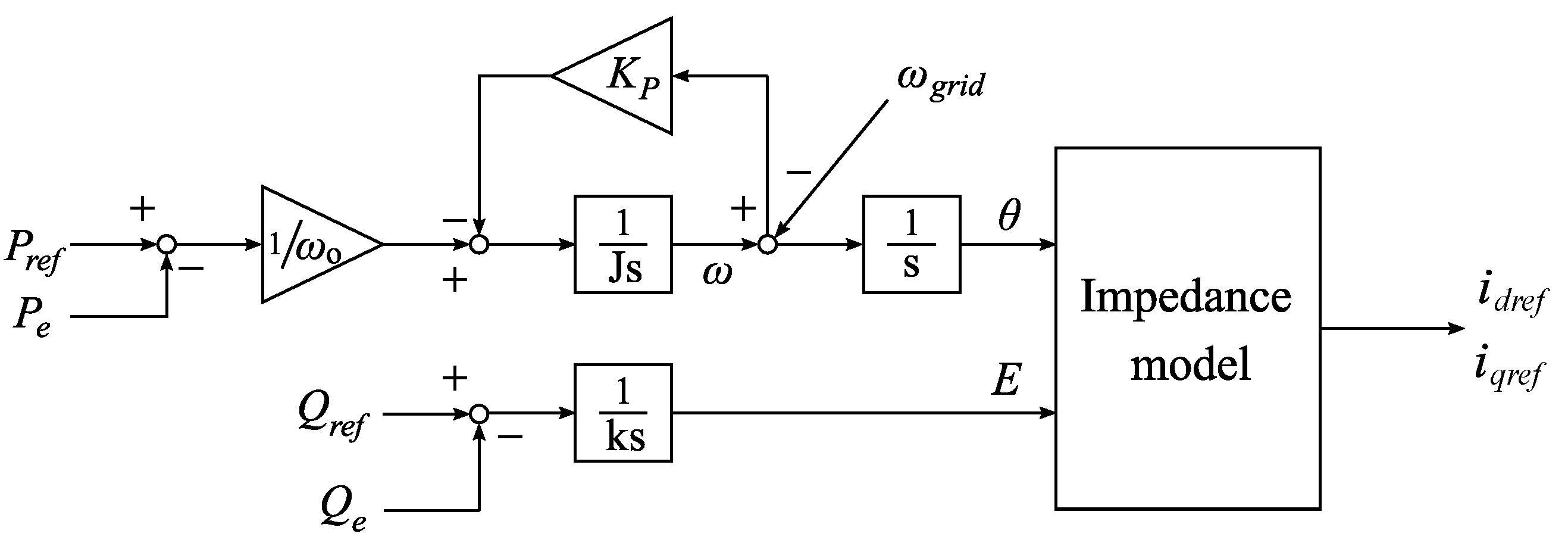
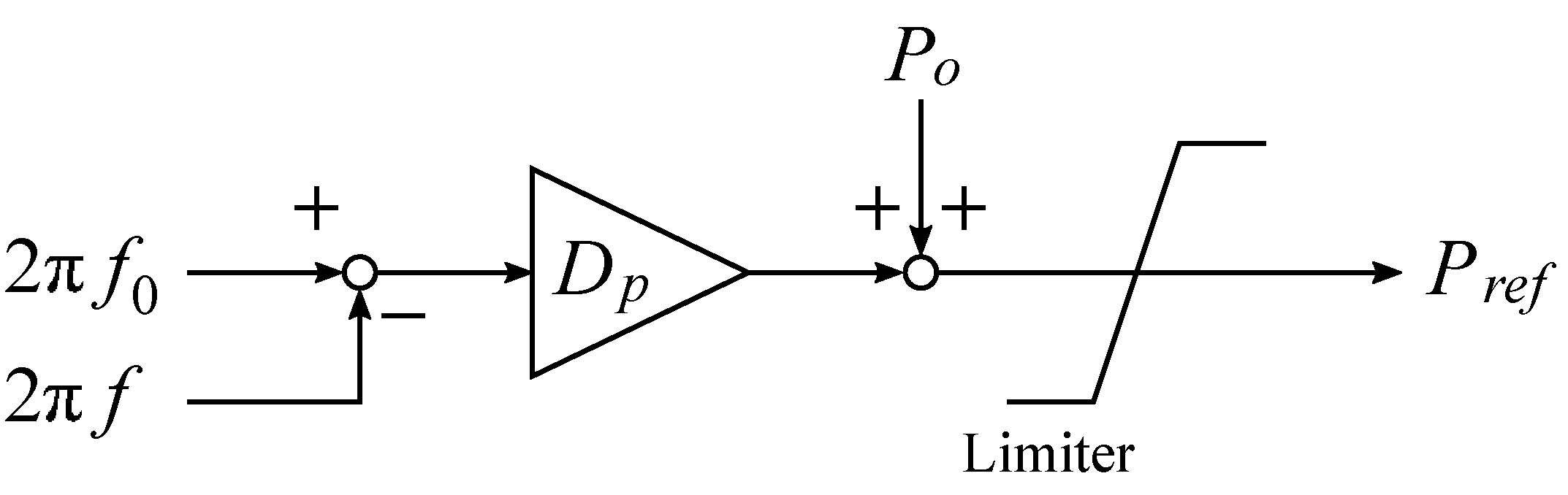
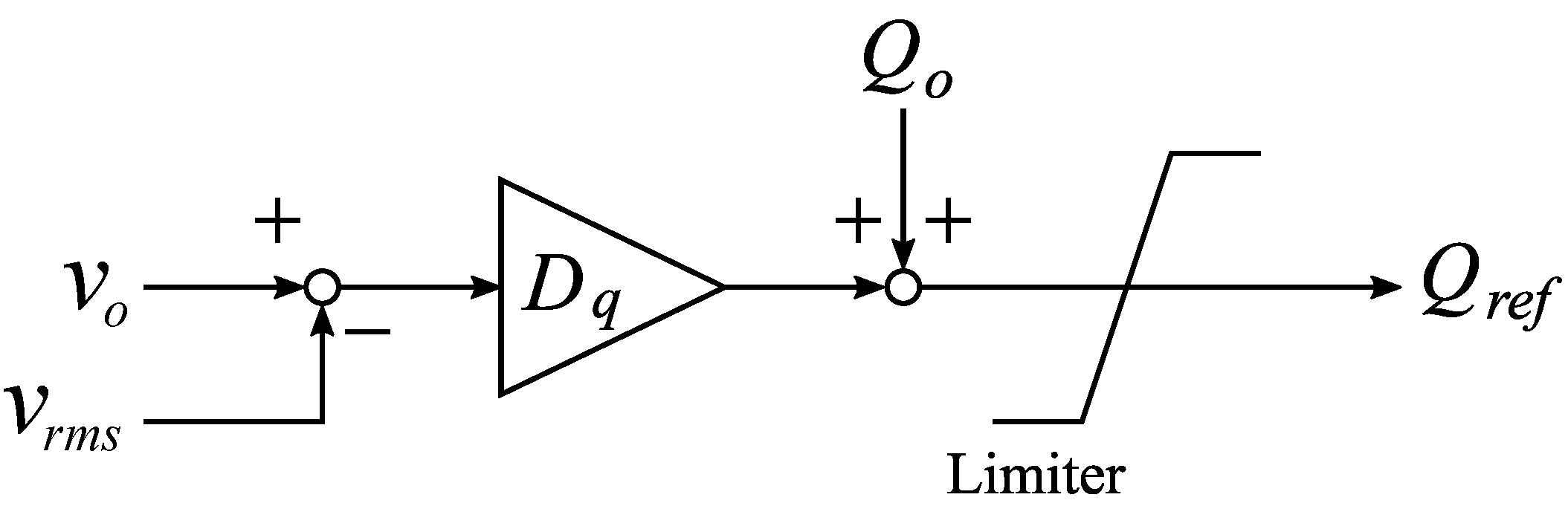
3.1. Active and Reactive Power Reference Generation Strategy
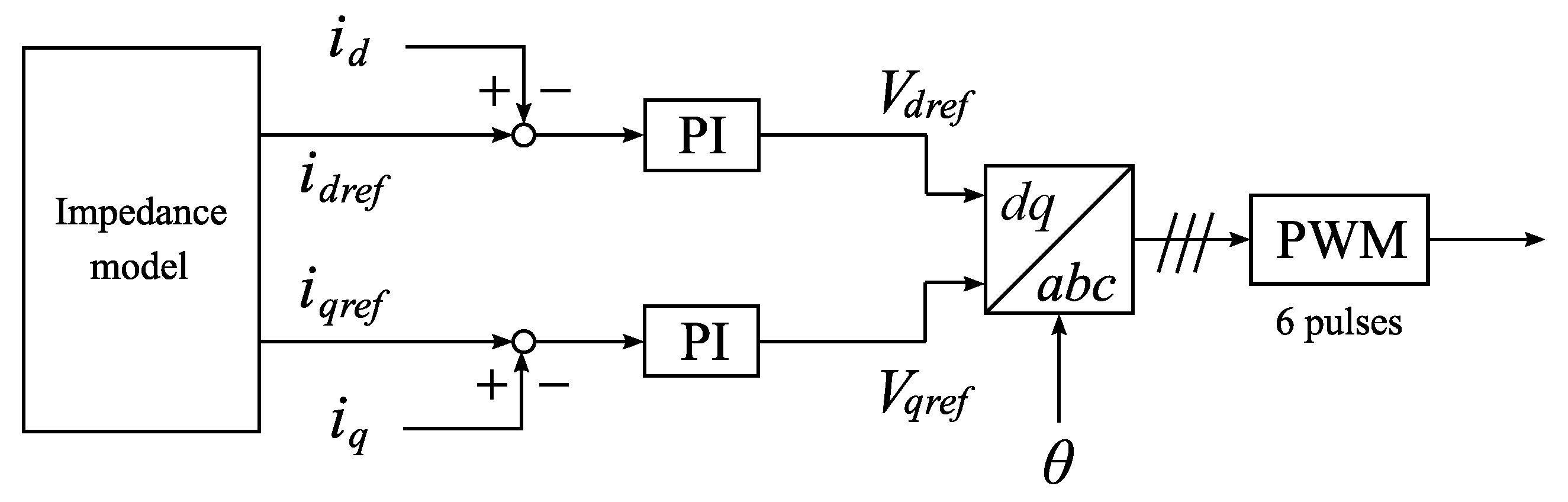
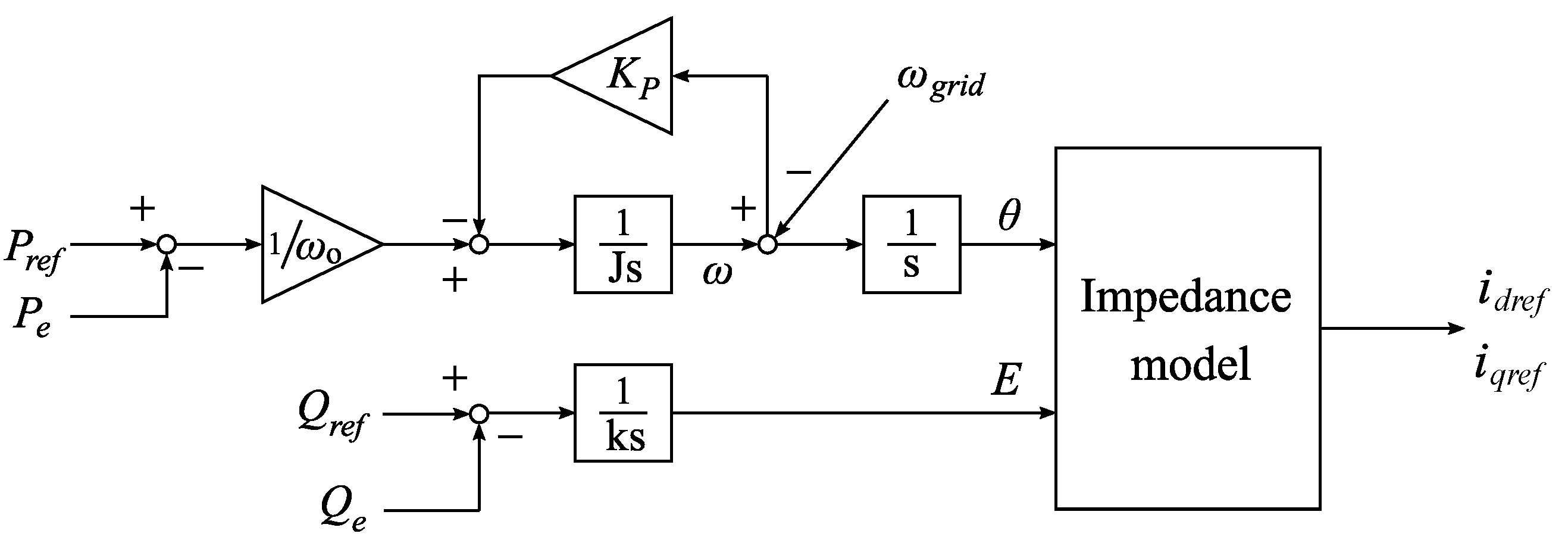
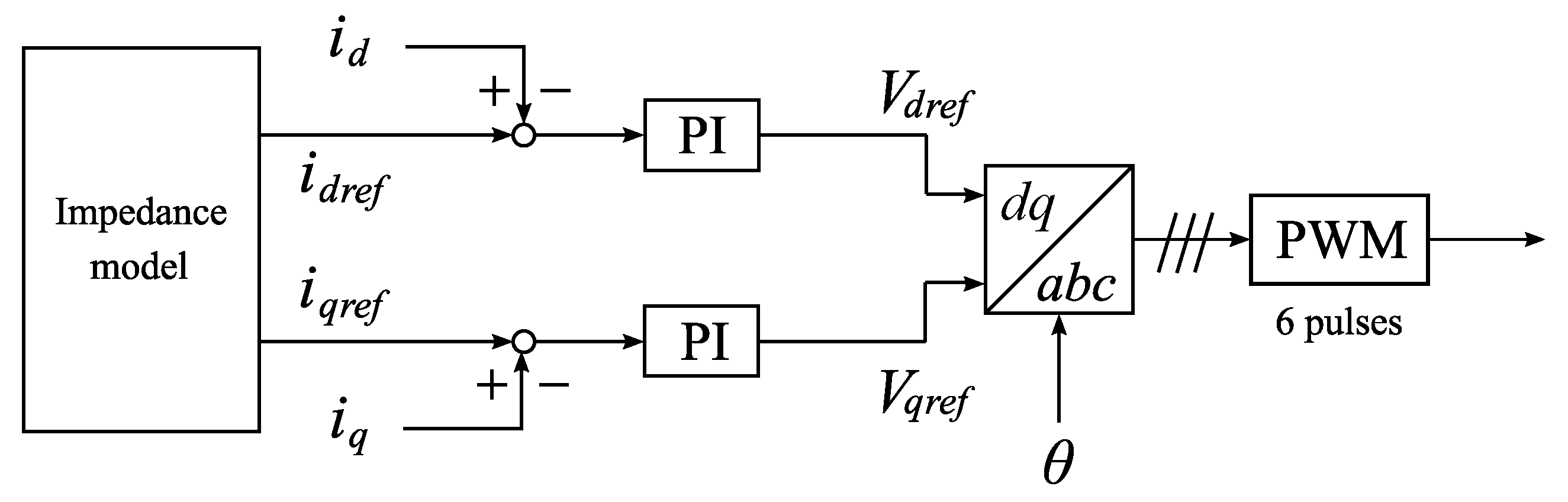
3.2. Virtual Synchronous Generator Control Strategy
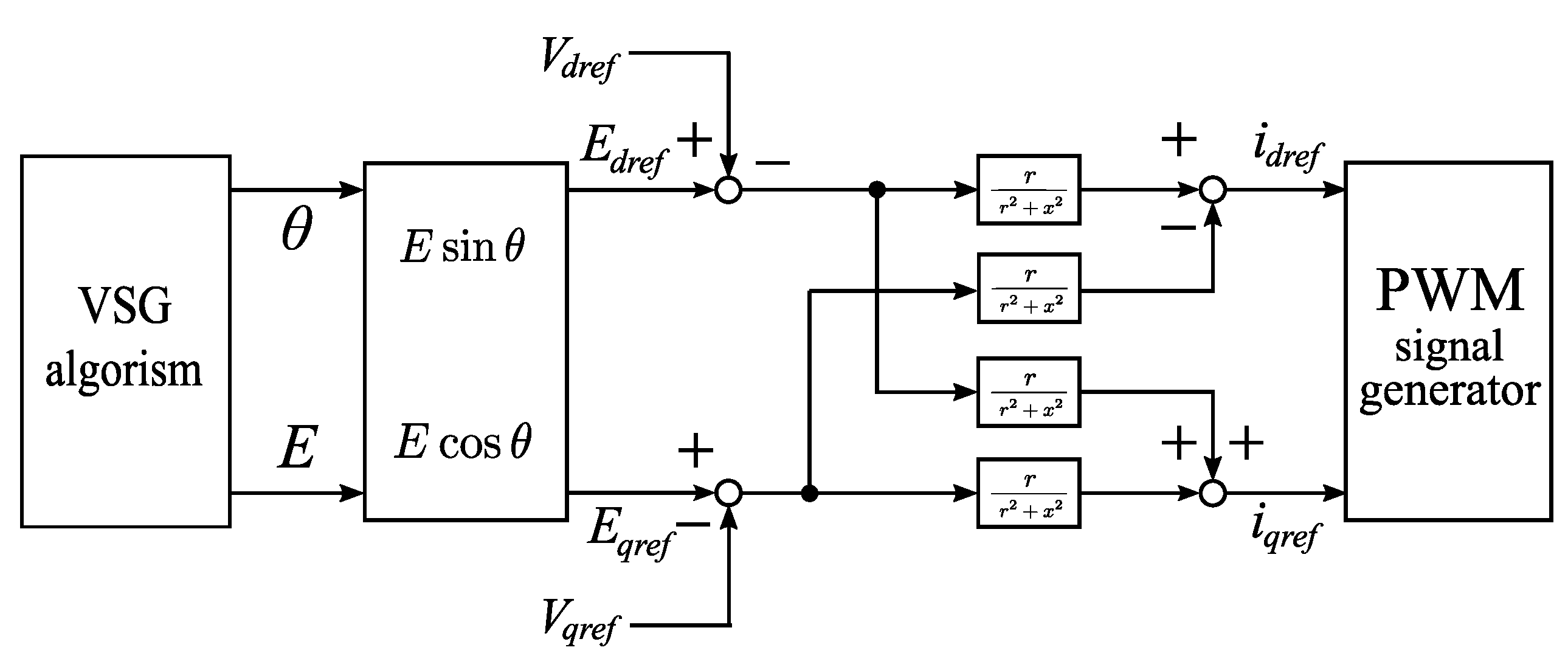
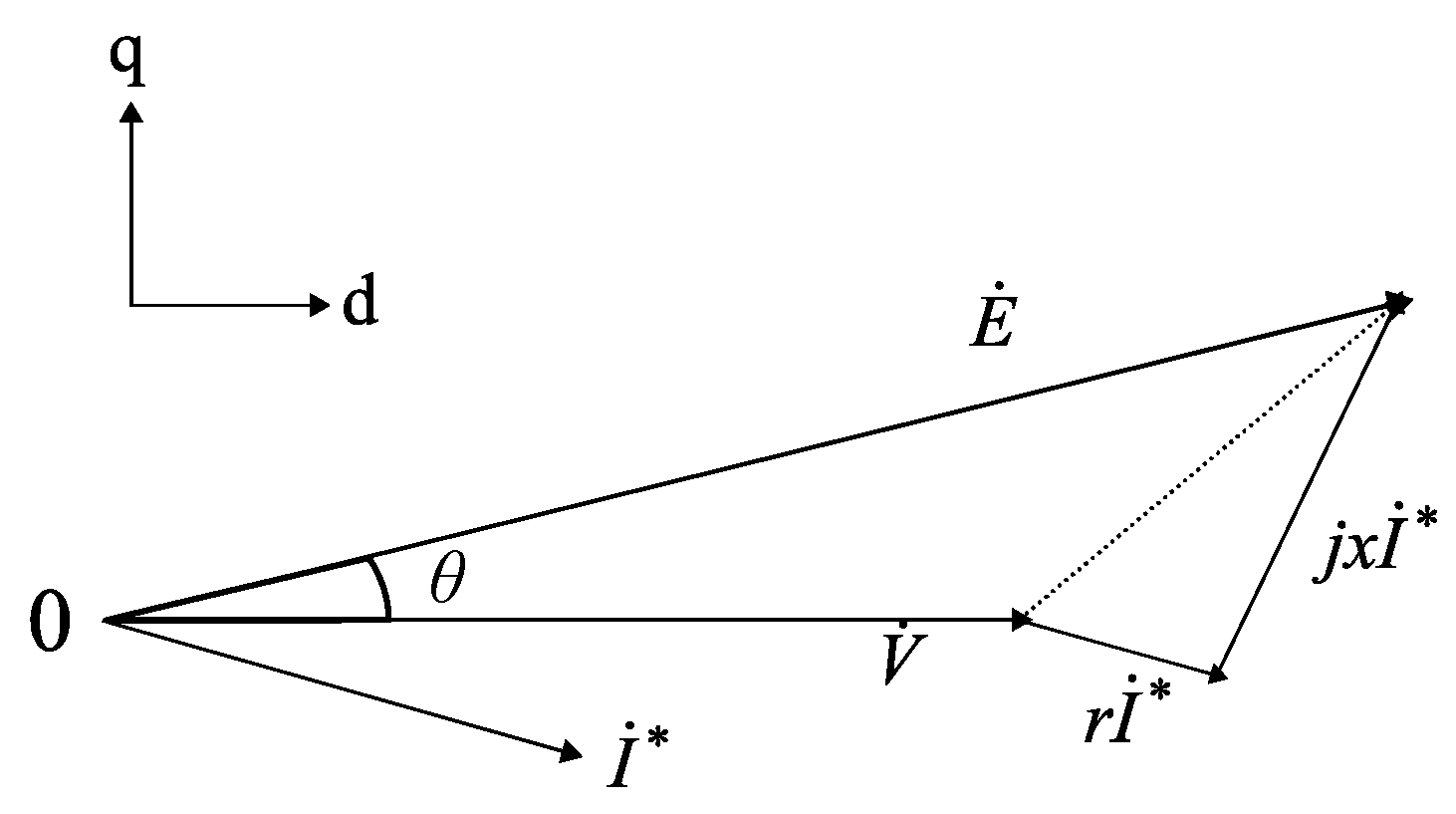
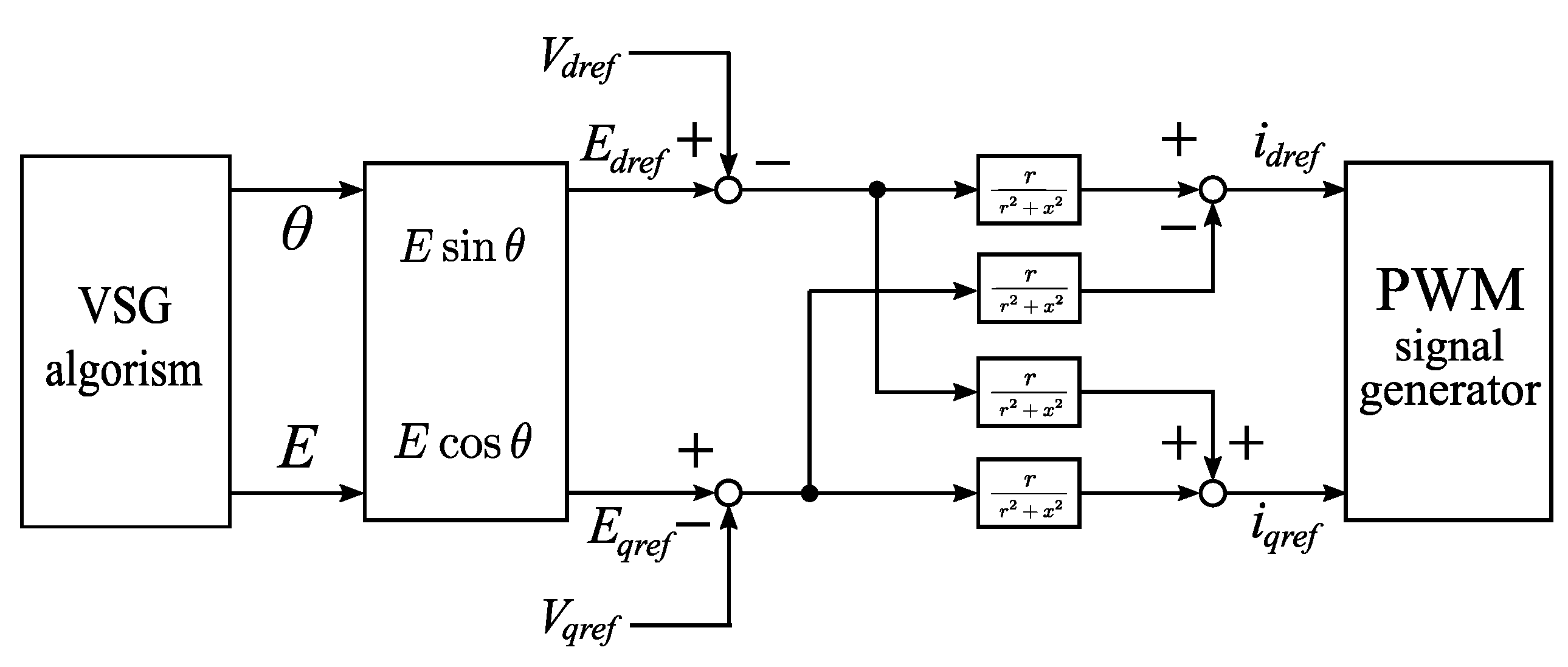
3.3. Virtual Impedance Model
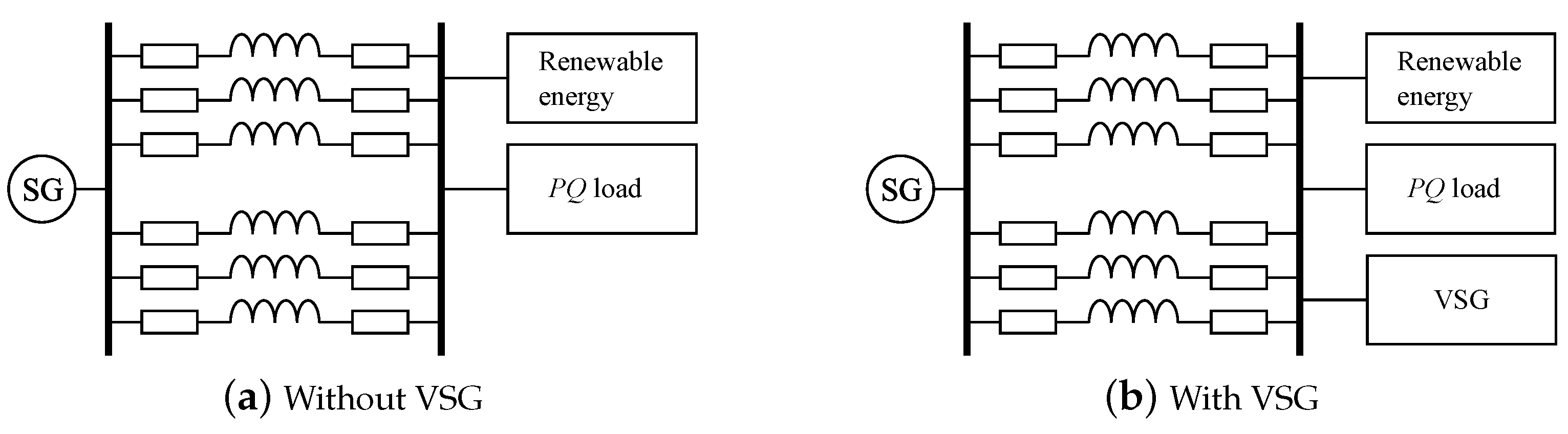
4. Simulation Results
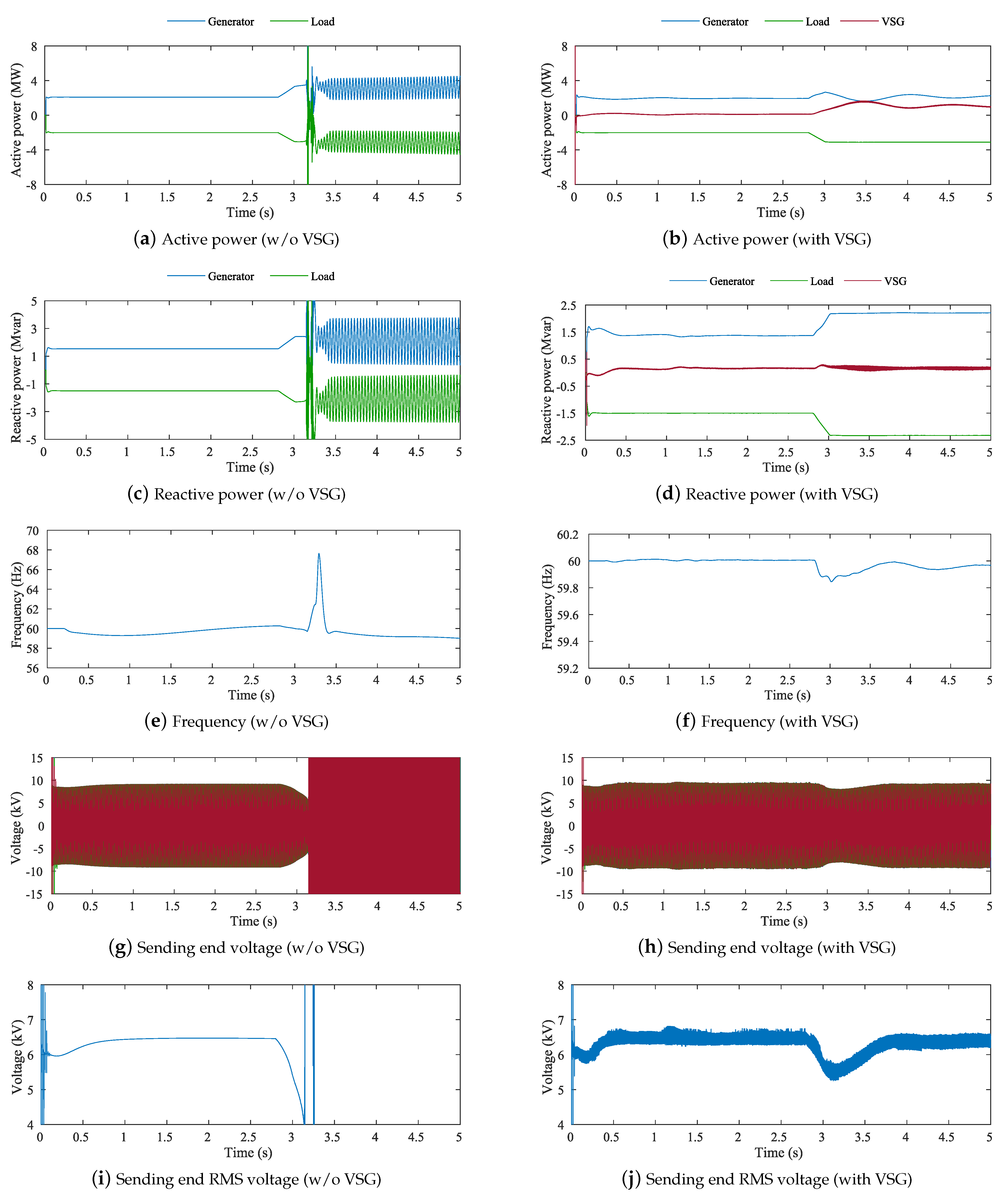
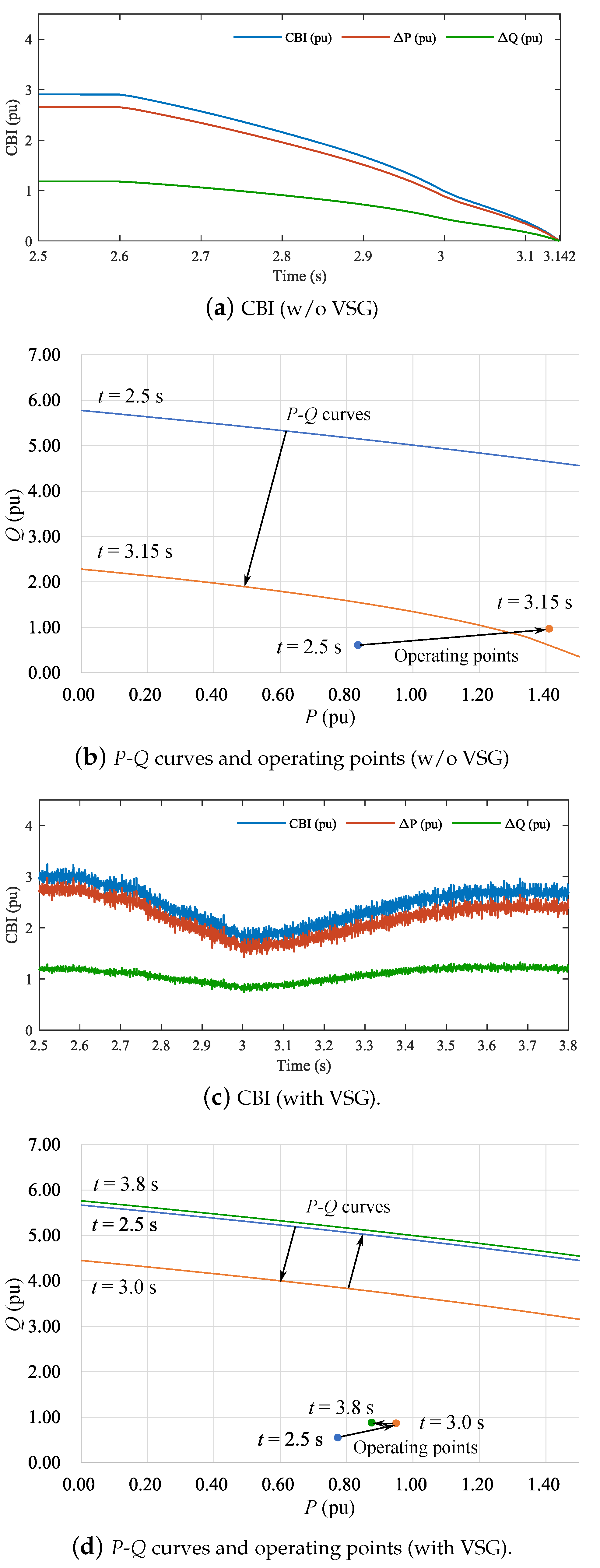
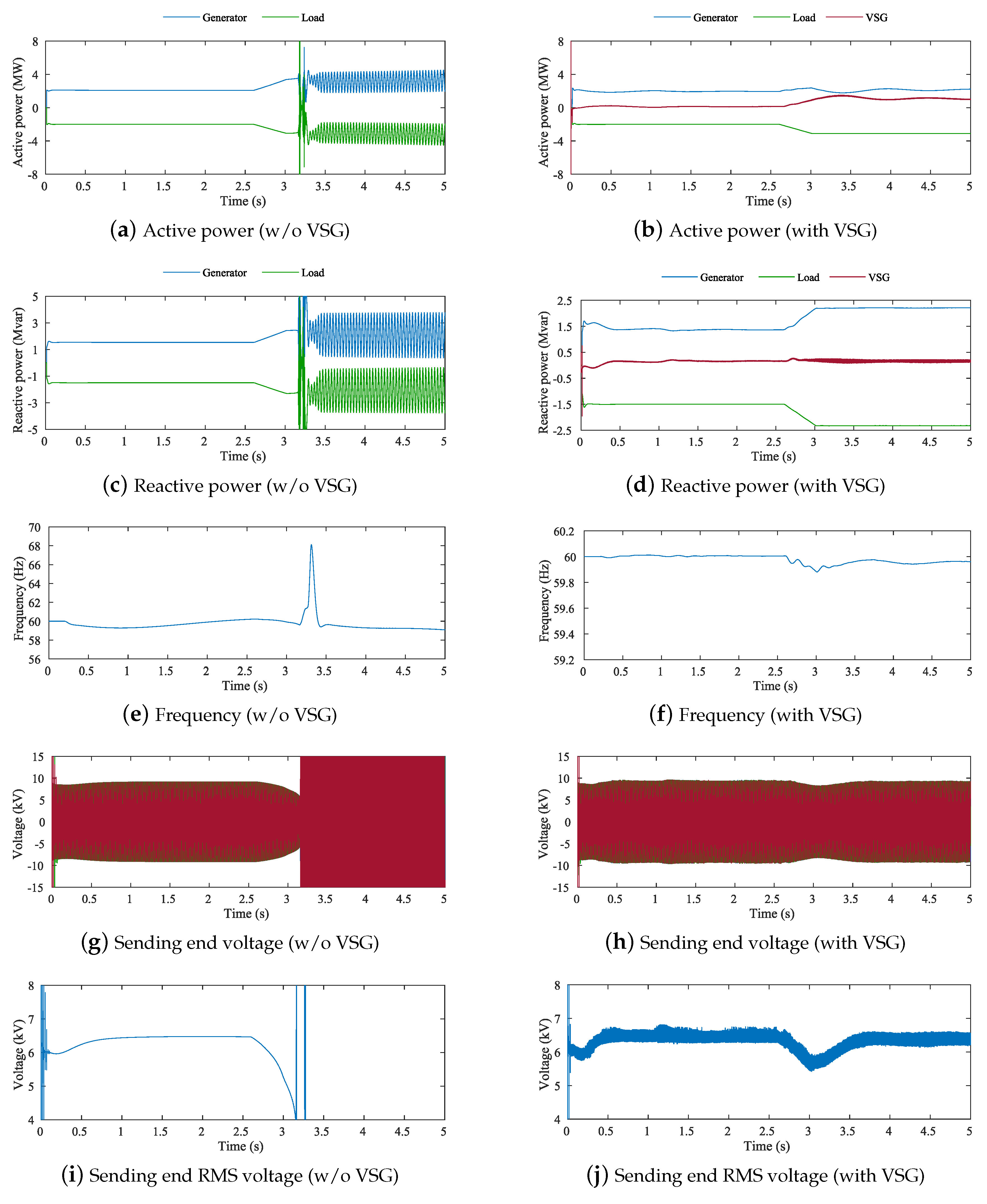
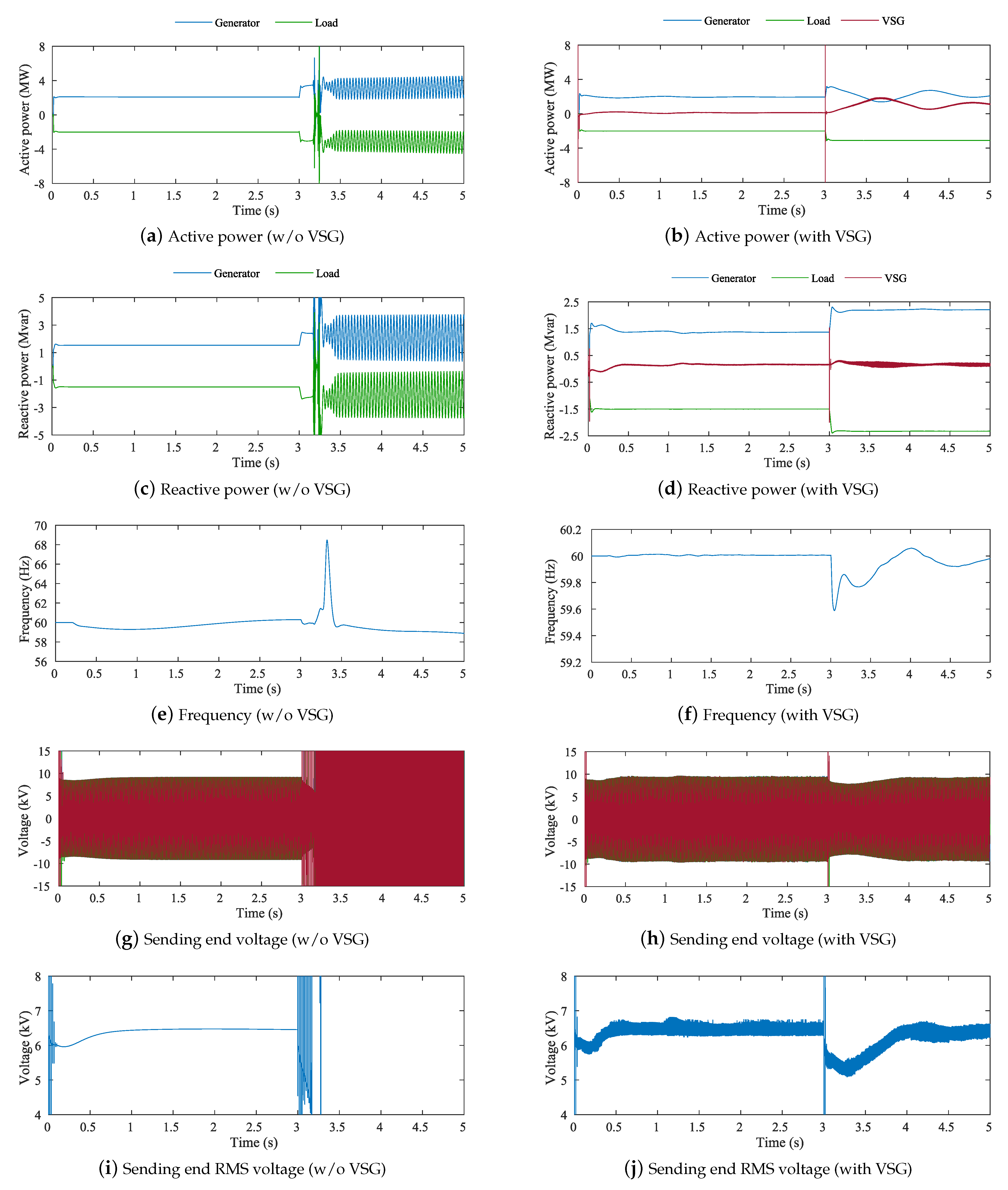
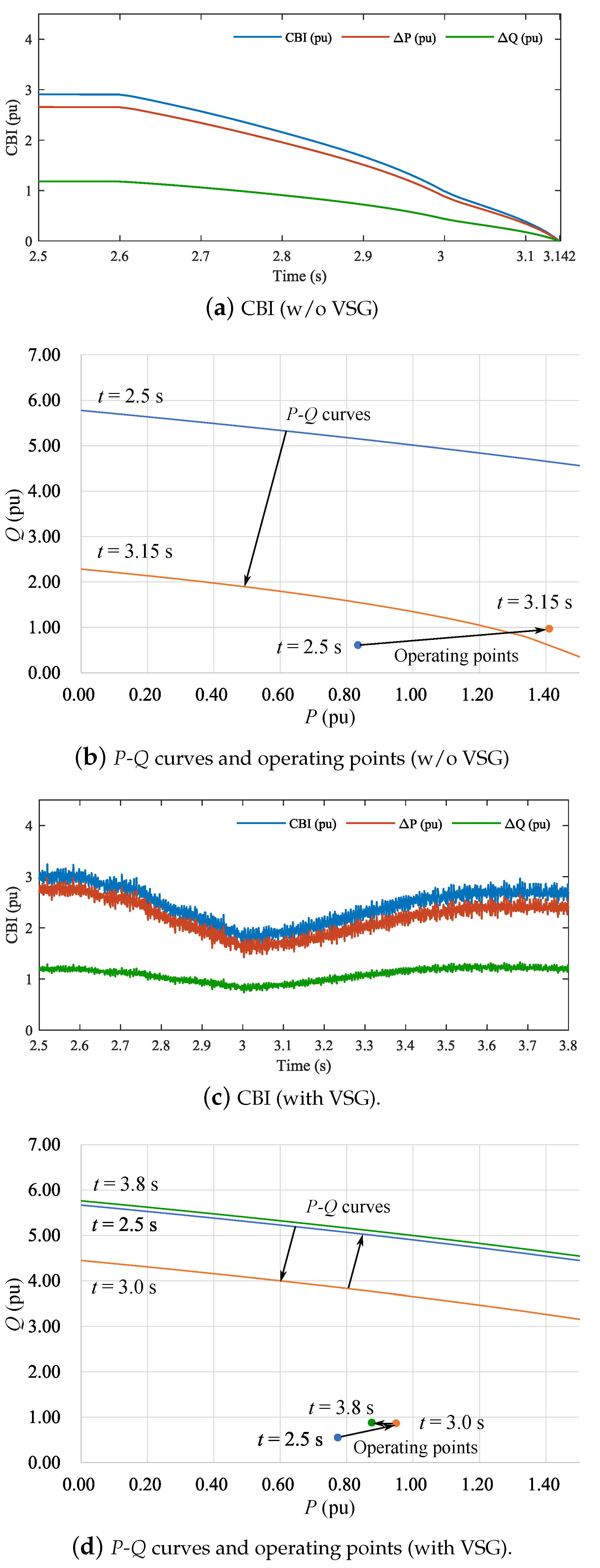
4.1. Case 1: Dynamic Voltage Stability during Renewable Energy Output Fluctuation
- Case 1.1:
- Slow ramp-down of renewable energy output
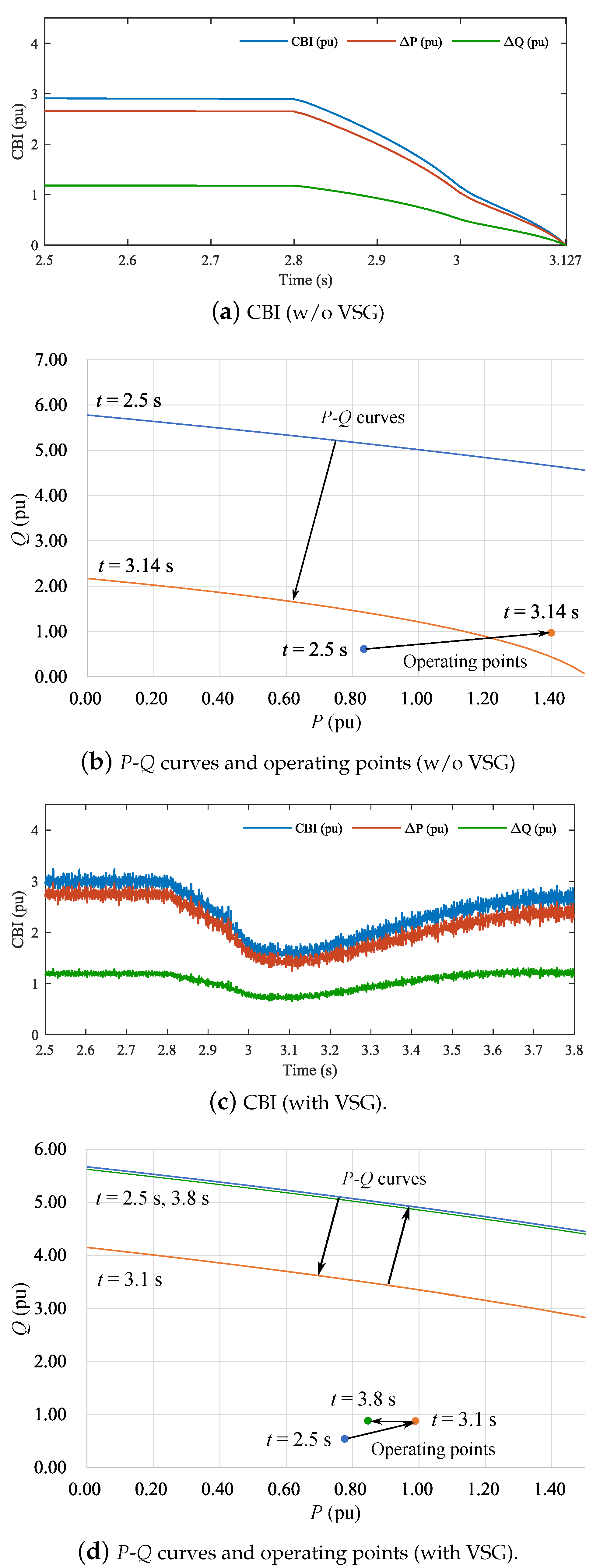
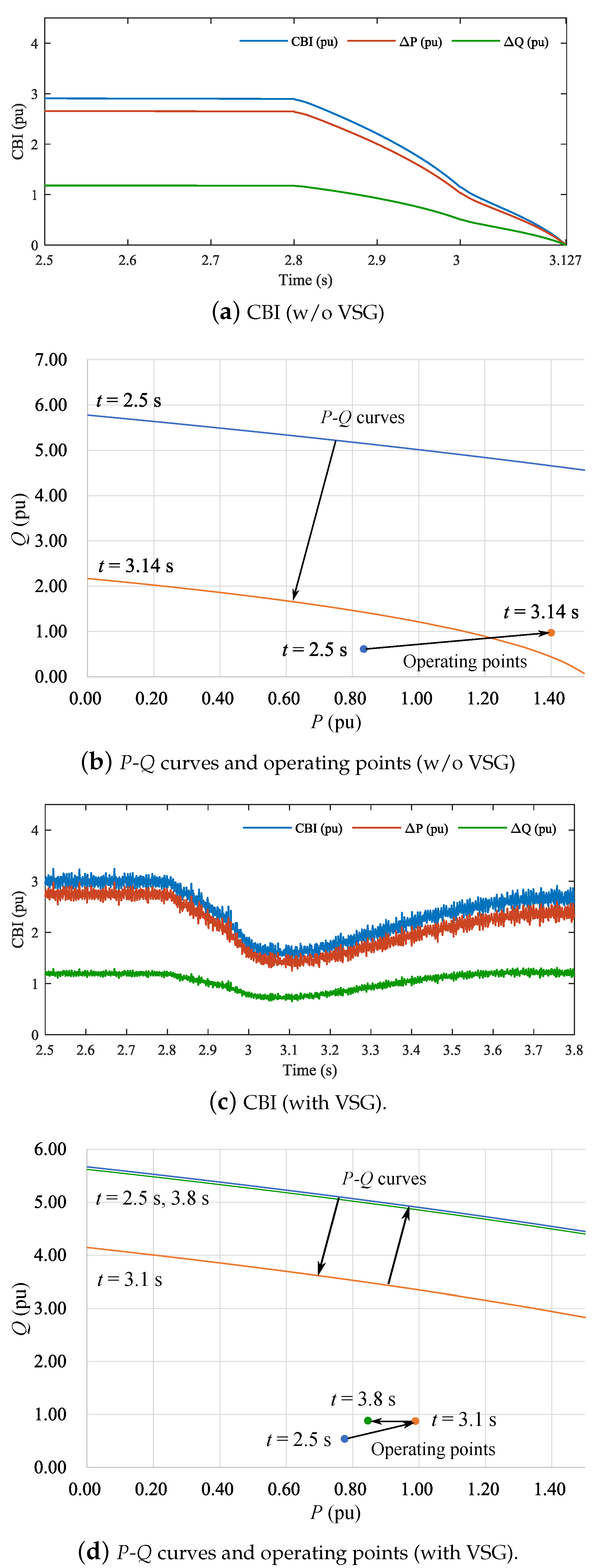
- Case 1.2:
- Fast ramp-down of renewable energy output.
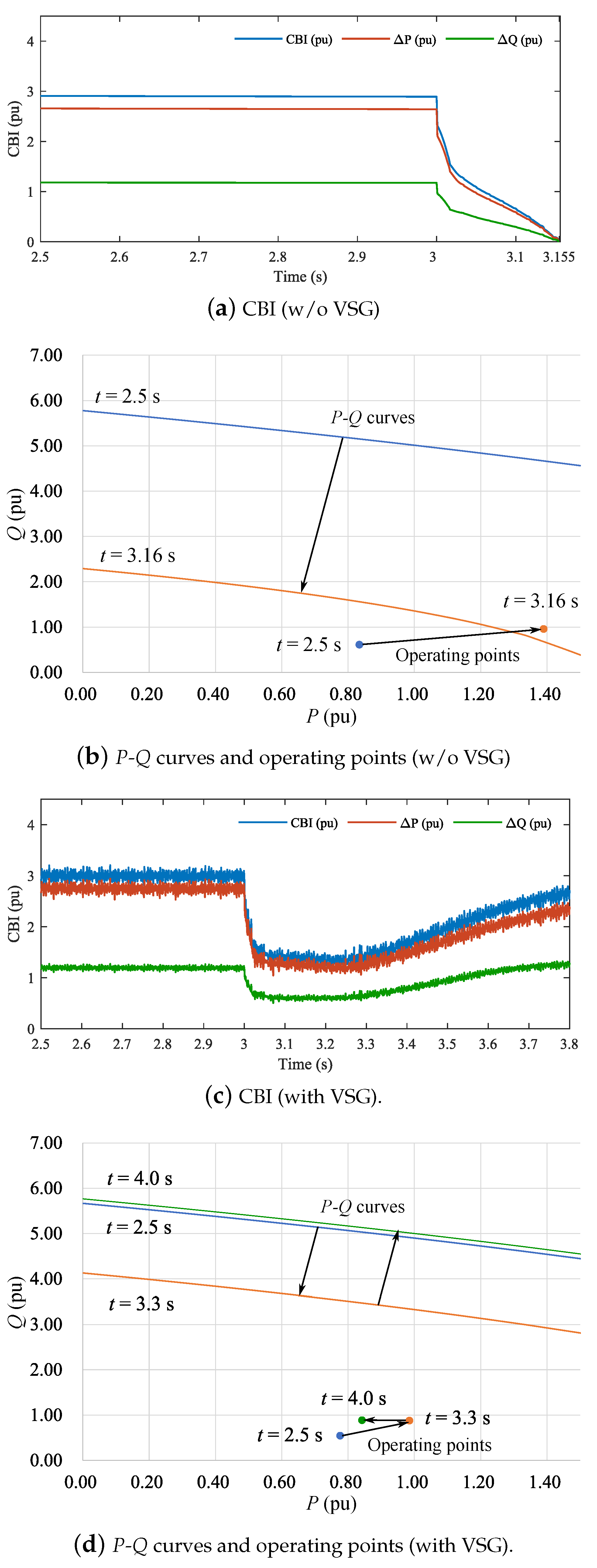
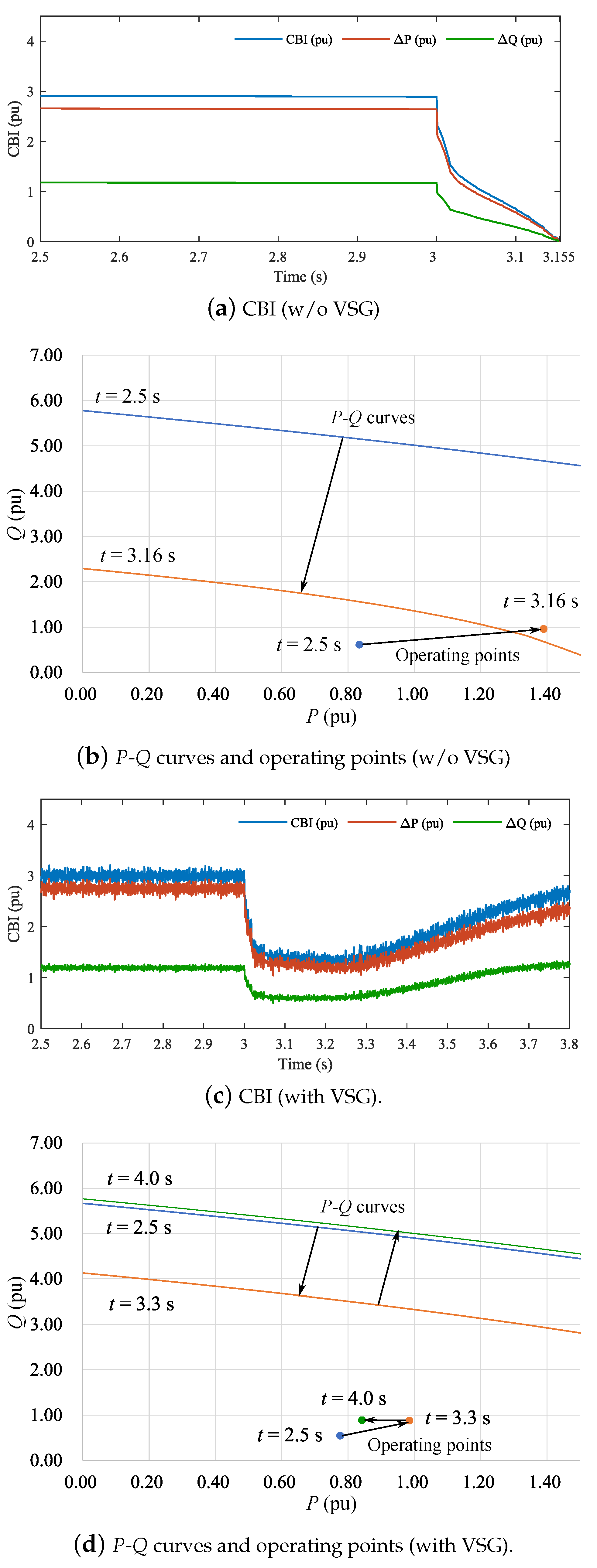
- Case 1.3:
- Sudden drop in renewable energy output.
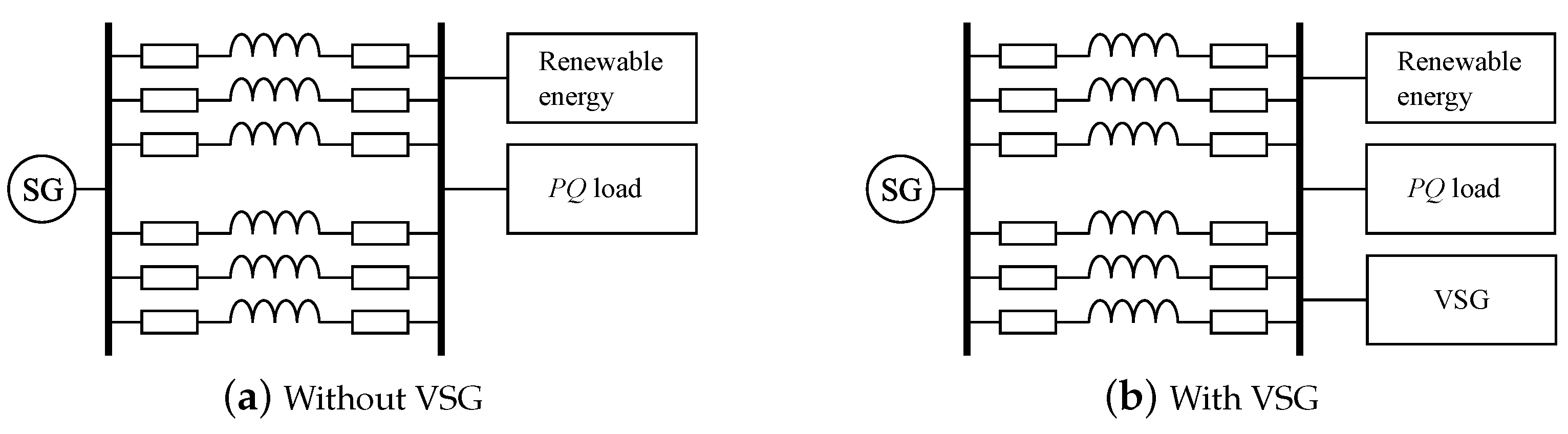
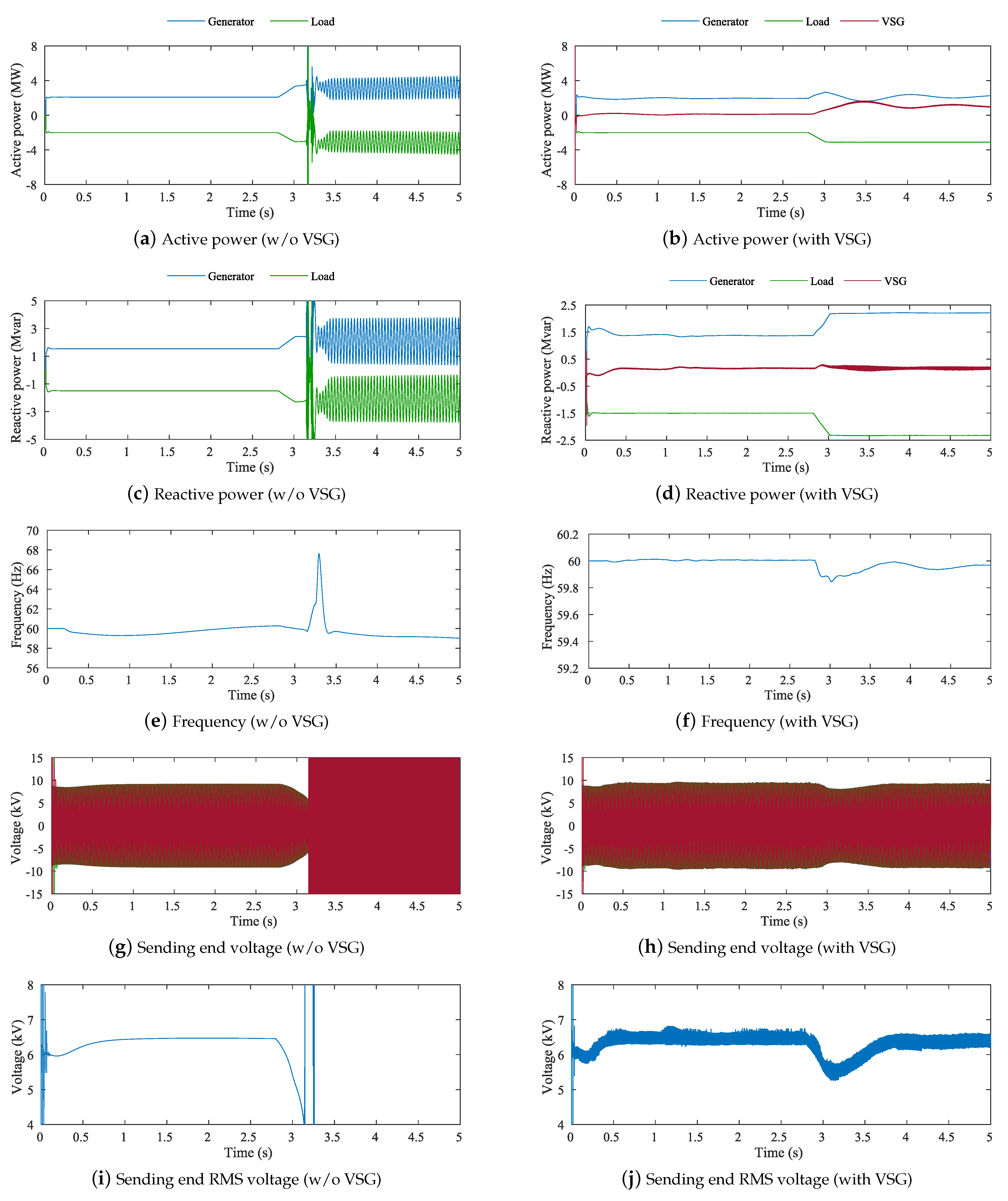
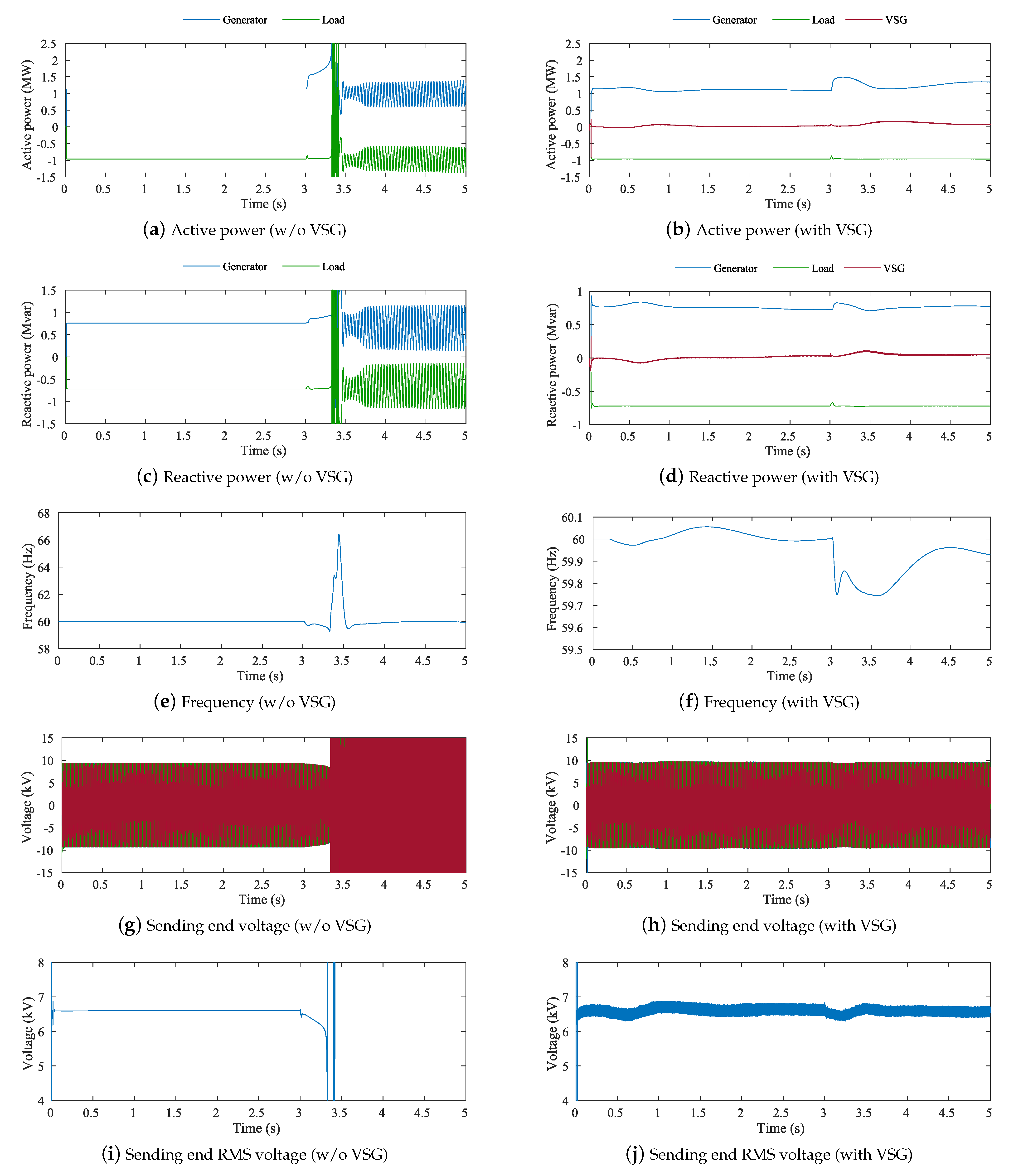
4.2. Case 2: Dynamic Voltage Stability during One-Line Outage of Transmission Line
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Shin, H.; Jung, J.; Oh, S.; Hur, K.; Iba, K.; Lee, B. Evaluating the Influence of Momentary Cessation Mode in Inverter-Based Distributed Generators on Power System Transient Stability. IEEE Trans. Power Syst. 2020, 35, 1618–1626. [Google Scholar] [CrossRef]
- Drhorhi, I.; El Fadili, A.; El Kasmi, D.; Stitou, M. Evaluation of the moroccan electrical grid dynamic stability after large scale renewable energies integration. In Proceedings of the 3rd Renewable Energies, Power Systems and Green Inclusive Economy, REPS and GIE 2018, Casablanca, Morocco, 23–24 April 2018; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2018. [Google Scholar] [CrossRef]
- Wang, Y.; Chiang, H.D.; Wang, T. A two-stage method for assessment of voltage stability in power system with renewable energy. In Proceedings of the 2013 IEEE Electrical Power and Energy Conference, Halifax, NS, Canada, 21–23 August 2013; EPEC 2013. IEEE Computer Society: Piscataway, NJ, USA, 2013. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhou, Q.; Zhao, L.; Ma, Y.; Lv, Q.; Gao, P. Dynamic reactive power configuration of high penetration renewable energy grid based on transient stability probability assessment. In Proceedings of the 2020 IEEE 4th Conference on Energy Internet and Energy System Integration: Connecting the Grids Towards a Low-Carbon High-Efficiency Energy System, EI2 2020, Wuhan, China, 30 October–1 November 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020; pp. 3801–3805. [Google Scholar] [CrossRef]
- Radovanovic, A.; Naranjo Plaza, J.; Li, X.; Milanovic, J.V. The influence of hybrid renewable energy source plant composition on transmission system stability. In Proceedings of the IEEE PES Innovative Smart Grid Technologies Conference Europe, The Hague, The Netherlands, 26–28 October 2020; IEEE Computer Society: Piscataway, NJ, USA, 2020; pp. 584–588. [Google Scholar] [CrossRef]
- Cheema, K.M.; Mehmood, K. Improved virtual synchronous generator control to analyse and enhance the transient stability of microgrid. IET Renew. Power Gener. 2020, 14, 495–505. [Google Scholar] [CrossRef]
- Liu, J.; Yang, D.; Yao, W.; Fang, R.; Zhao, H.; Wang, B. PV-based virtual synchronous generator with variable inertia to enhance power system transient stability utilizing the energy storage system. Prot. Control Mod. Power Syst. 2017, 2, 1–8. [Google Scholar] [CrossRef]
- Shi, R.; Zhang, X.; Hu, C.; Xu, H.; Gu, J.; Cao, W. Self-tuning virtual synchronous generator control for improving frequency stability in autonomous photovoltaic-diesel microgrids. J. Mod. Power Syst. Clean Energy 2018, 6, 482–494. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.; Dong, Z.Y.; Meng, K.; Yao, W.F.; Zhang, R.; Wong, K.P. Multi-objective dynamic VAR planning against short-term voltage instability using a decomposition-based evolutionary algorithm. IEEE Trans. Power Syst. 2014, 29, 2813–2822. [Google Scholar] [CrossRef]
- Moghavvemi, M.; Omar, F. Technique for contingency monitoring and voltage collapse prediction. IEE Proc.-Gener. Transm. Distrib. 1998, 145, 634–640. [Google Scholar] [CrossRef]
- Moghavvemi, M.; Faruque, M.O. Technique for assessment of voltage stability in Ill-conditioned radial distribution network. IEEE Power Eng. Rev. 2001, 21, 58–60. [Google Scholar] [CrossRef]
- Musirin, I.; Rahman, T.K. Estimation of maximum loadability in power systems by using fast voltage stability index. Int. J. Power Energy Syst. 2005, 25, 181–189. [Google Scholar] [CrossRef]
- Yazdanpanah-Goharrizi, A.; Asghari, R. A Novel Line Stability Index (NLSI) for Voltage Stability Assessment of Power Systems. In Proceedings of the 7th WSEAS International Conference on Power Systems, Beijing, China, 15–17 September 2007; pp. 164–167. [Google Scholar]
- Lim, Z.J.; Mustafa, M.W.; Bt Muda, Z. Evaluation of the effectiveness of voltage stability indices on different loadings. In Proceedings of the 2012 IEEE International Power Engineering and Optimization Conference, PEOCO 2012-Conference Proceedings, Melaka, Malaysia, 6–7 June 2012; pp. 543–547. [Google Scholar] [CrossRef] [Green Version]
- Furukakoi, M.; Adewuyi, O.B.; Shah Danish, M.S.; Howlader, A.M.; Senjyu, T.; Funabashi, T. Critical Boundary Index (CBI) based on active and reactive power deviations. Int. J. Electr. Power Energy Syst. 2018, 100, 50–57. [Google Scholar] [CrossRef]
- Kamel, M.; Karrar, A.A.; Eltom, A.H. Development and Application of a New Voltage Stability Index for On-Line Monitoring and Shedding. IEEE Trans. Power Syst. 2018, 33, 1231–1241. [Google Scholar] [CrossRef] [Green Version]
- Zheng, T.; Chen, L.; Guo, Y.; Mei, S. Comprehensive control strategy of virtual synchronous generator under unbalanced voltage conditions. IET Gener. Transm. Distrib. 2018, 12, 1621–1630. [Google Scholar] [CrossRef]
- Hirase, Y.; Sugimoto, K.; Sakimoto, K.; Ise, T. Analysis of Resonance in Microgrids and Effects of System Frequency Stabilization Using a Virtual Synchronous Generator. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1287–1298. [Google Scholar] [CrossRef]
- Hirase, Y.; Abe, K.; Sugimoto, K.; Sakimoto, K.; Bevrani, H.; Ise, T. A novel control approach for virtual synchronous generators to suppress frequency and voltage fluctuations in microgrids. Appl. Energy 2018, 210, 699–710. [Google Scholar] [CrossRef]
- Hirase, Y.; Abe, K.; Sugimoto, K.; Shindo, Y. A grid-connected inverter with virtual synchronous generator model of algebraic type. IEEJ Trans. Power Energy 2013, 184, 371–380. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Value |
|---|---|
| Sending end voltage | 6.6 kV |
| Initial load | 2.5 MW |
| Load power factor | 0.8 pu |
| Frequency | 60 Hz |
| Line resistance | 1 |
| Line inductance | 0.001 H |
| Description | Symbol | Value |
|---|---|---|
| Nominal active power | 200 kW | |
| Nominal reactive power | 150 kvar | |
| Nominal frequency | 60 Hz | |
| Nominal voltage | 6.6 kV | |
| Droop coefficient of frequency | 3,000,000 | |
| Droop coefficient of voltage | 30.3 | |
| Virtual inertia coefficient | J | 0.002 |
| Virtual damping coefficient | 0.2 | |
| Integral gain | k | 20,000 |
| Virtual resistance | r | 2 |
| Virtual reactance | x | 27 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nakadomari, A.; Miyara, R.; Alharbi, T.; Prabaharan, N.; Rangarajan, S.S.; Collins, E.R.; Senjyu, T. Dynamic Voltage Stability Assessment in Remote Island Power System with Renewable Energy Resources and Virtual Synchronous Generator. Energies 2021, 14, 5851. https://doi.org/10.3390/en14185851
Nakadomari A, Miyara R, Alharbi T, Prabaharan N, Rangarajan SS, Collins ER, Senjyu T. Dynamic Voltage Stability Assessment in Remote Island Power System with Renewable Energy Resources and Virtual Synchronous Generator. Energies. 2021; 14(18):5851. https://doi.org/10.3390/en14185851
Chicago/Turabian StyleNakadomari, Akito, Ryo Miyara, Talal Alharbi, Natarajan Prabaharan, Shriram Srinivasarangan Rangarajan, Edward Randolph Collins, and Tomonobu Senjyu. 2021. "Dynamic Voltage Stability Assessment in Remote Island Power System with Renewable Energy Resources and Virtual Synchronous Generator" Energies 14, no. 18: 5851. https://doi.org/10.3390/en14185851
APA StyleNakadomari, A., Miyara, R., Alharbi, T., Prabaharan, N., Rangarajan, S. S., Collins, E. R., & Senjyu, T. (2021). Dynamic Voltage Stability Assessment in Remote Island Power System with Renewable Energy Resources and Virtual Synchronous Generator. Energies, 14(18), 5851. https://doi.org/10.3390/en14185851