
Load Sharing Scheme Incorporating Power Security Margins for Parallel Operation of Voltage Source Inverters


Abstract
:1. Introduction
- A Jacobian-based method that incorporates the operational power capabilities of the VSIs and associated dynamic state variables contributing towards potential power violations is proposed;
- A set of electrodynamic equations is developed that incorporates the VSM and PFT concepts in conjunction with the Jacobian-based method resulting in an amendable droop control that constrains the VSIs within their power capabilities during commensurate changes in load demand.
2. VSI-MG Mathematical Model
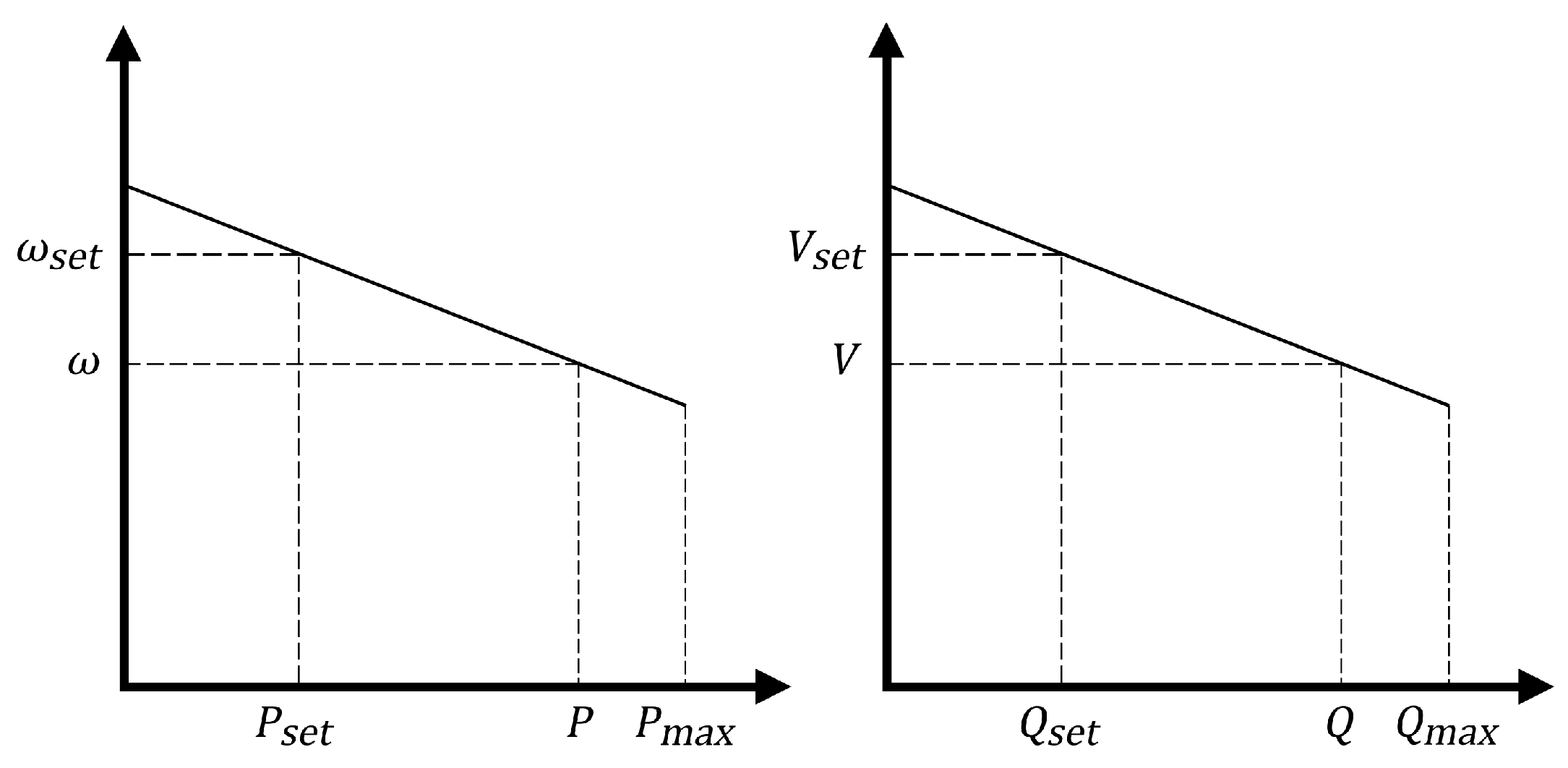
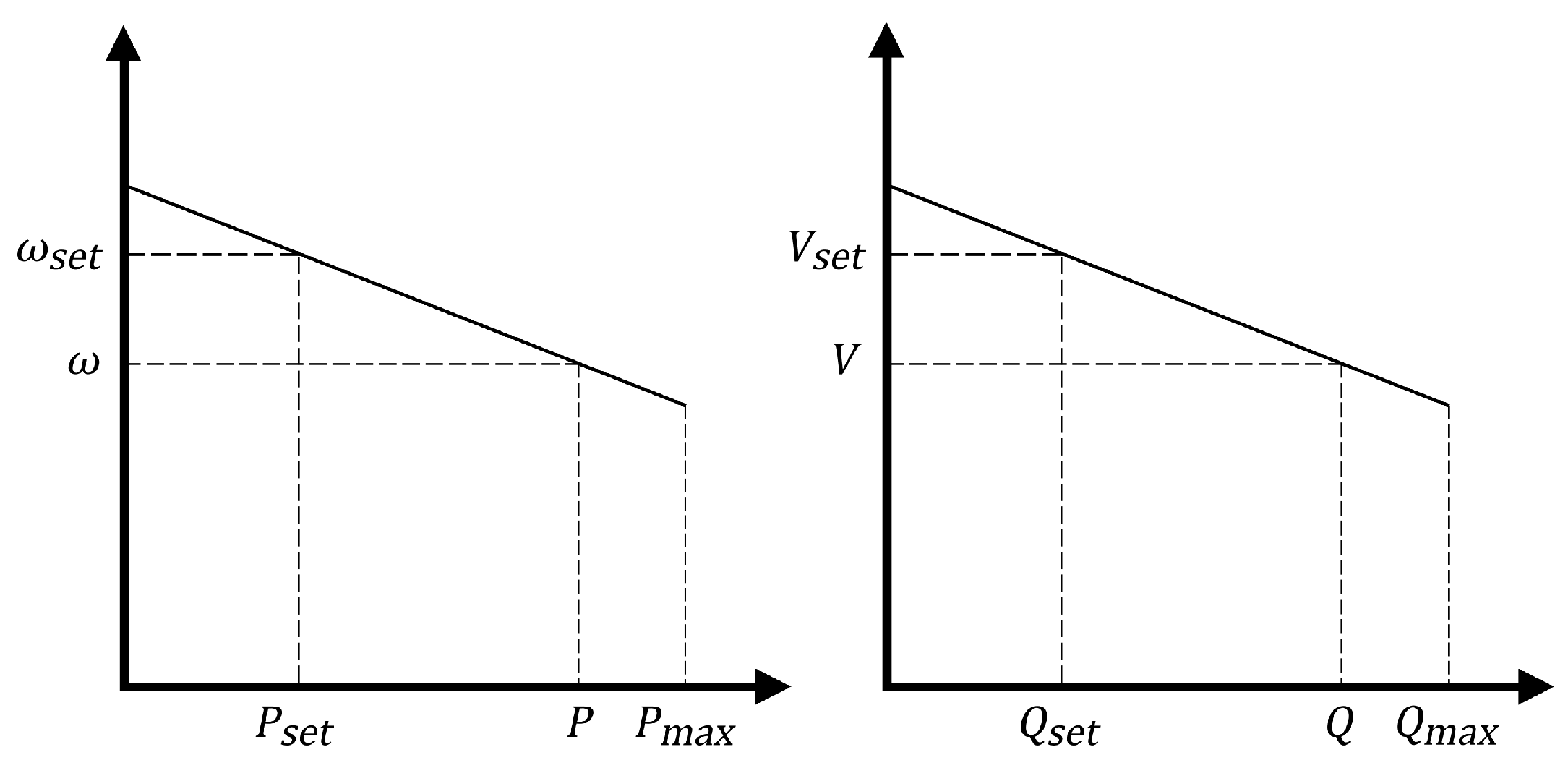
2.1. VSI Power and Droop Control
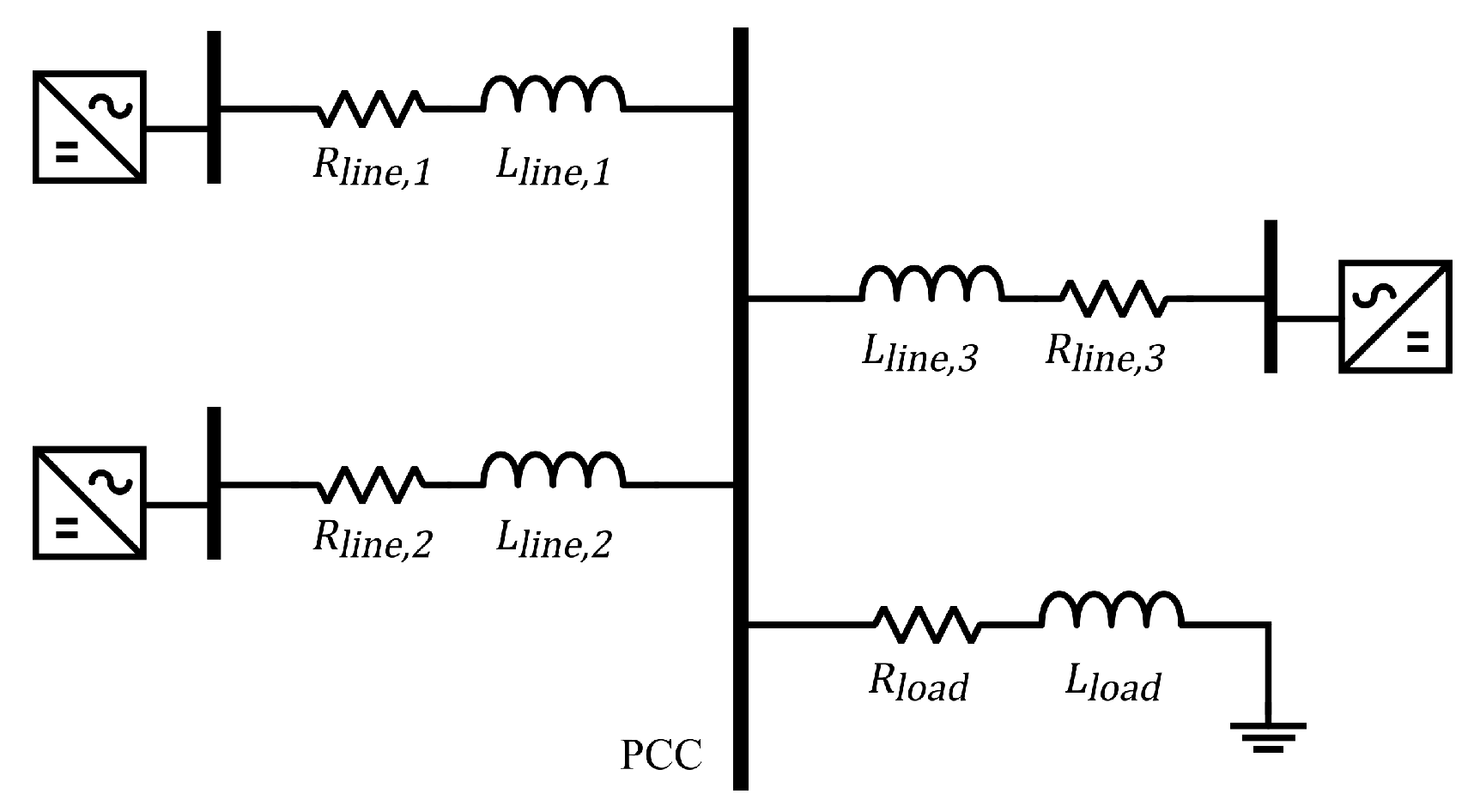
2.2. Interconnecting Load and Network
2.3. Concept of the VSM
2.4. Concept of the PFT
3. Jacobian-Based Method
4. Simulation Studies and Results
4.1. Simulation Results
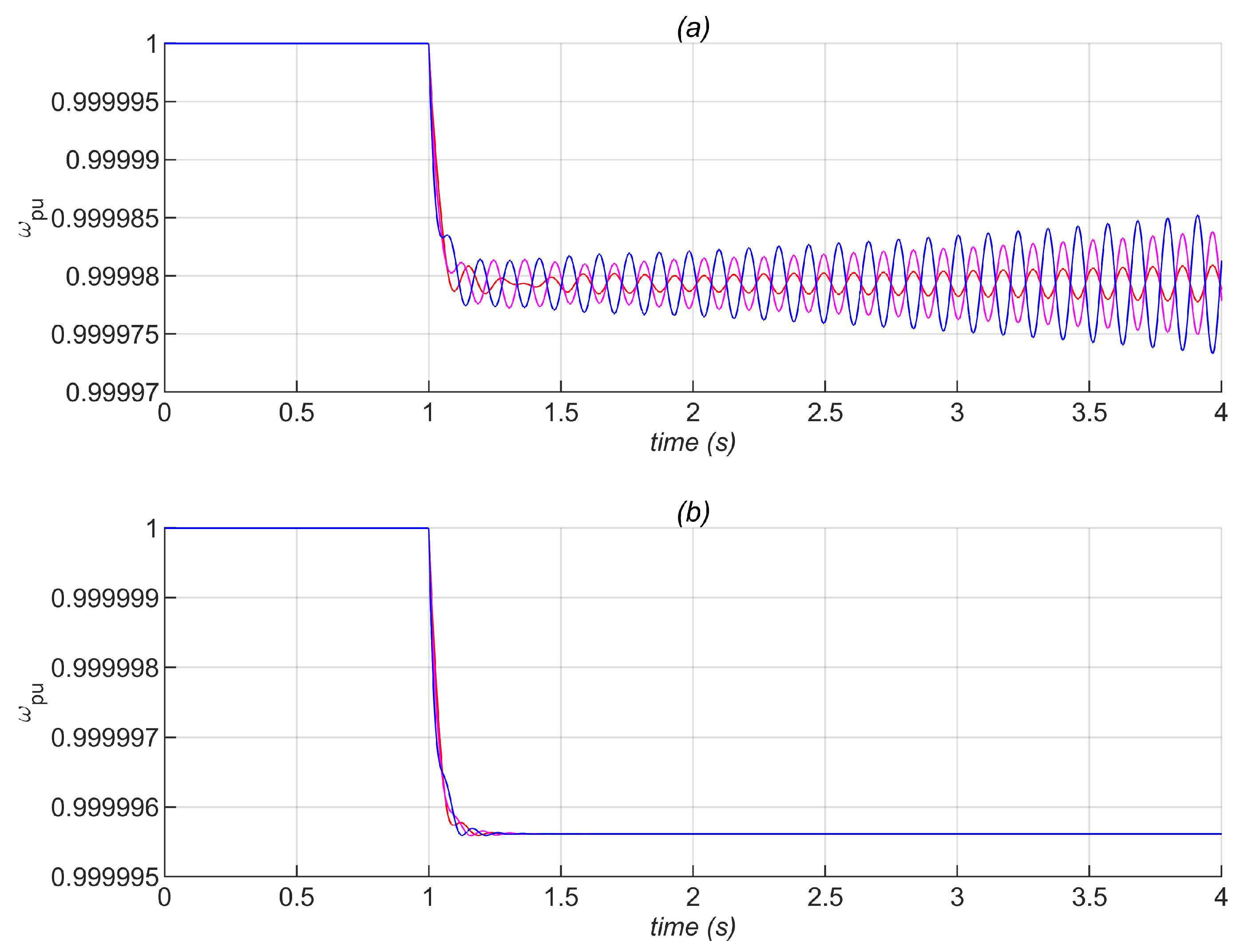
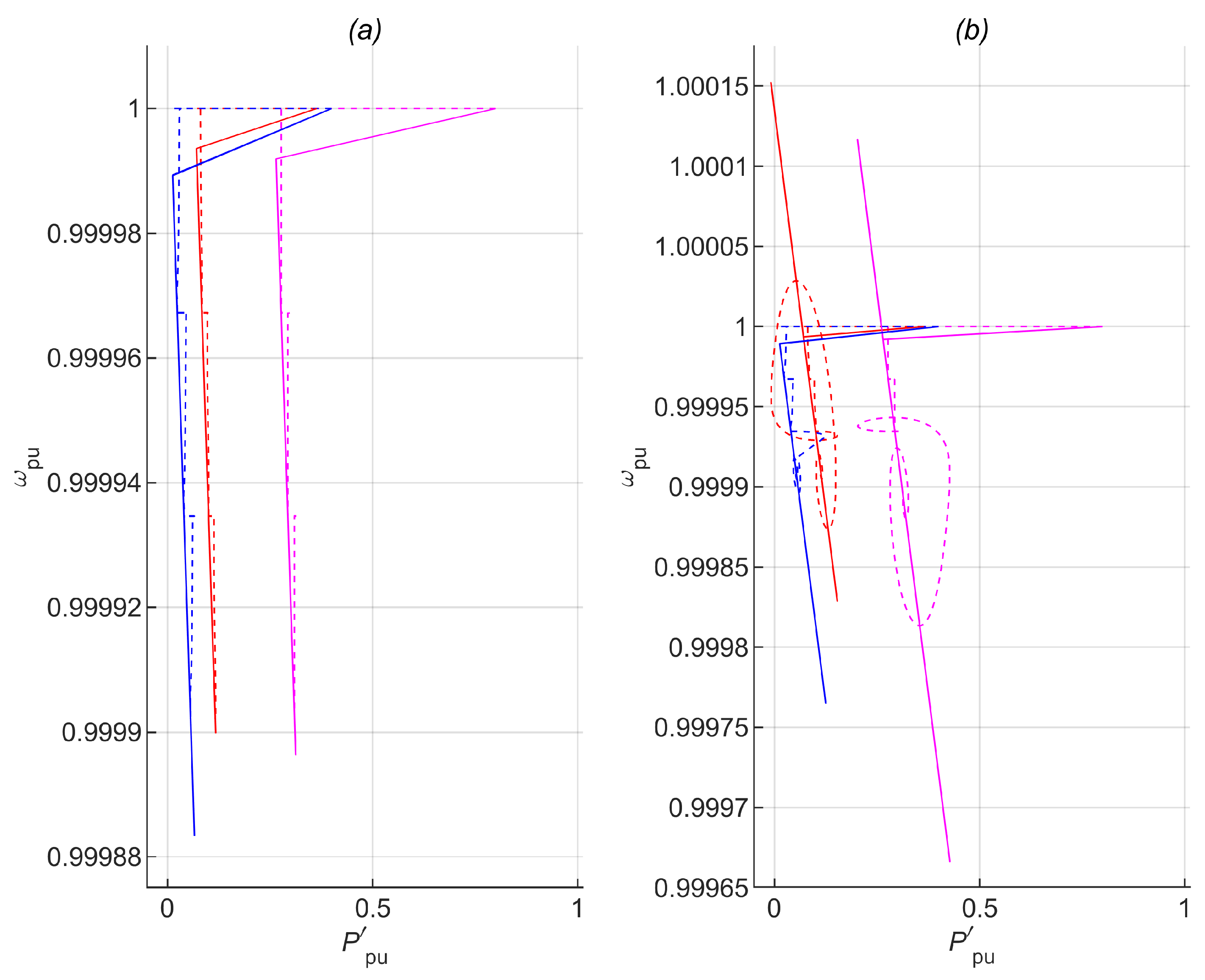
4.1.1. Analyzing and Impact on Stability
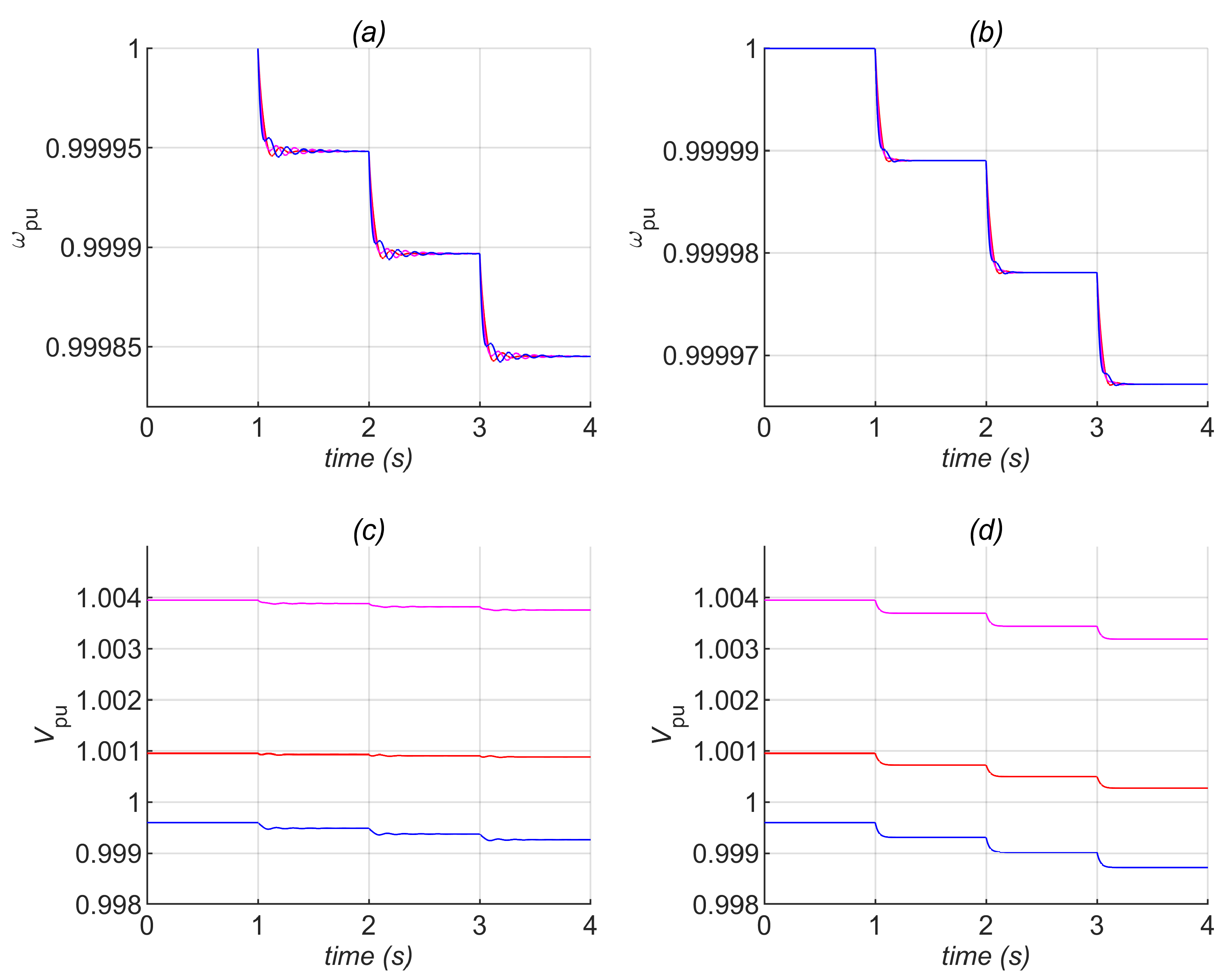
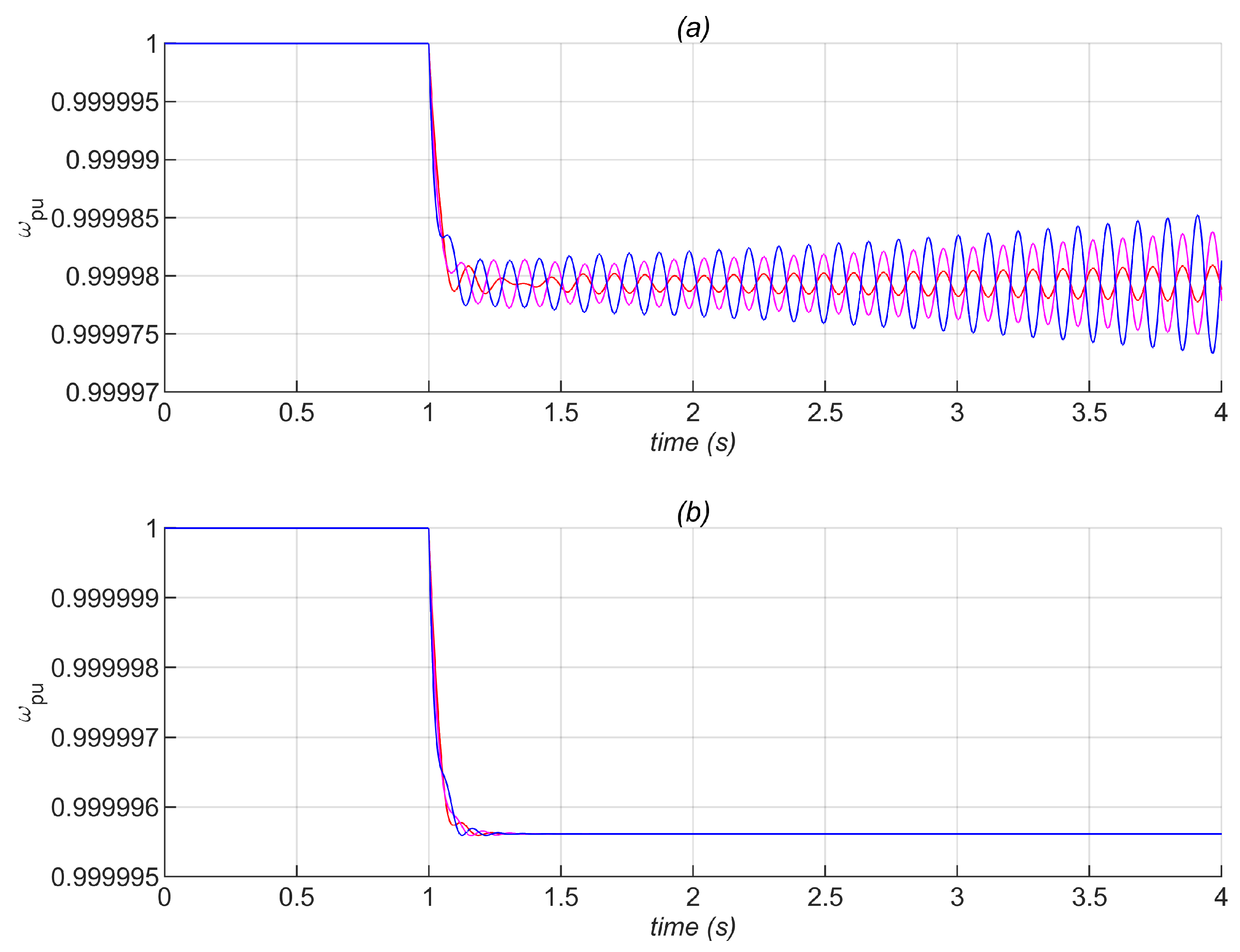
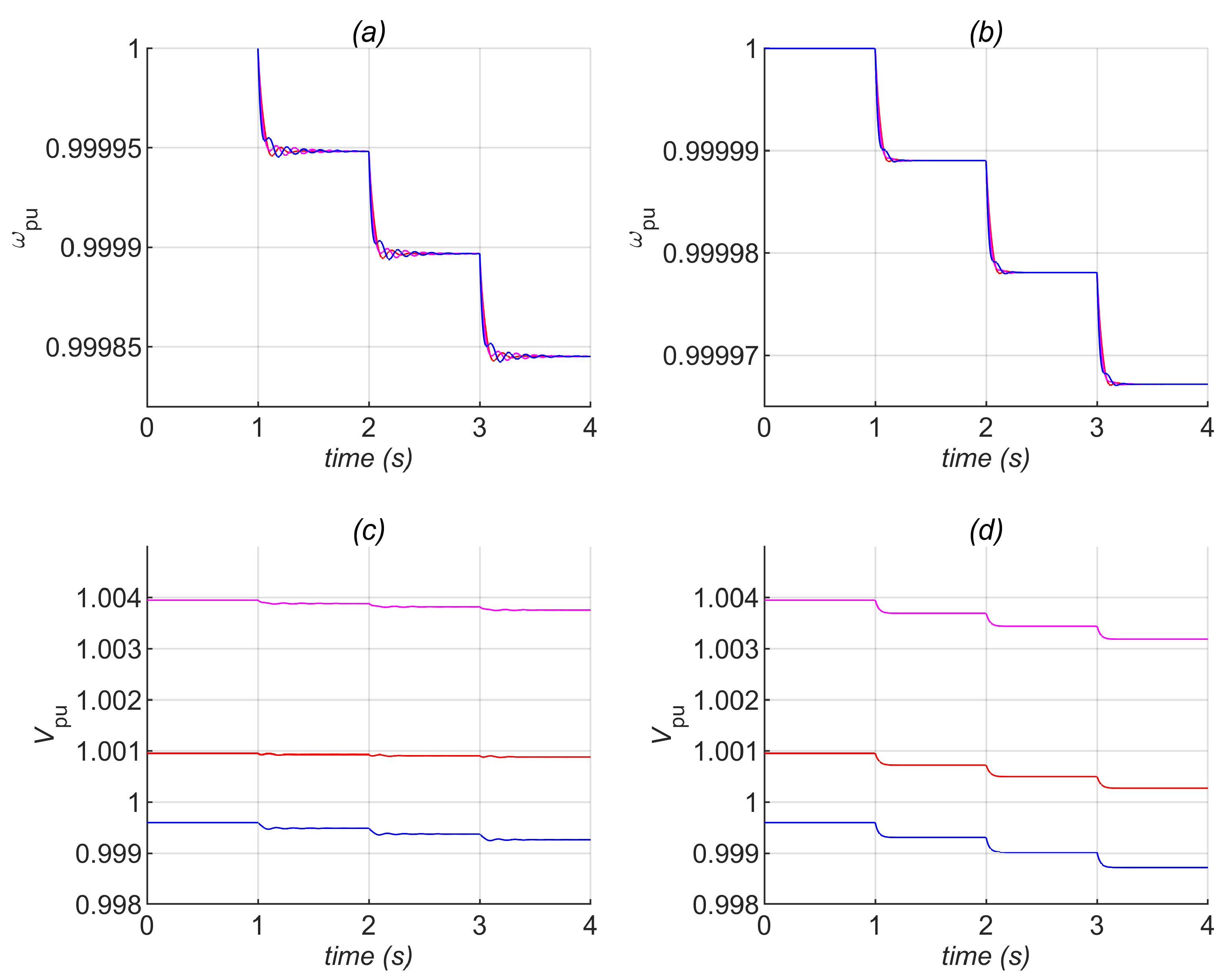
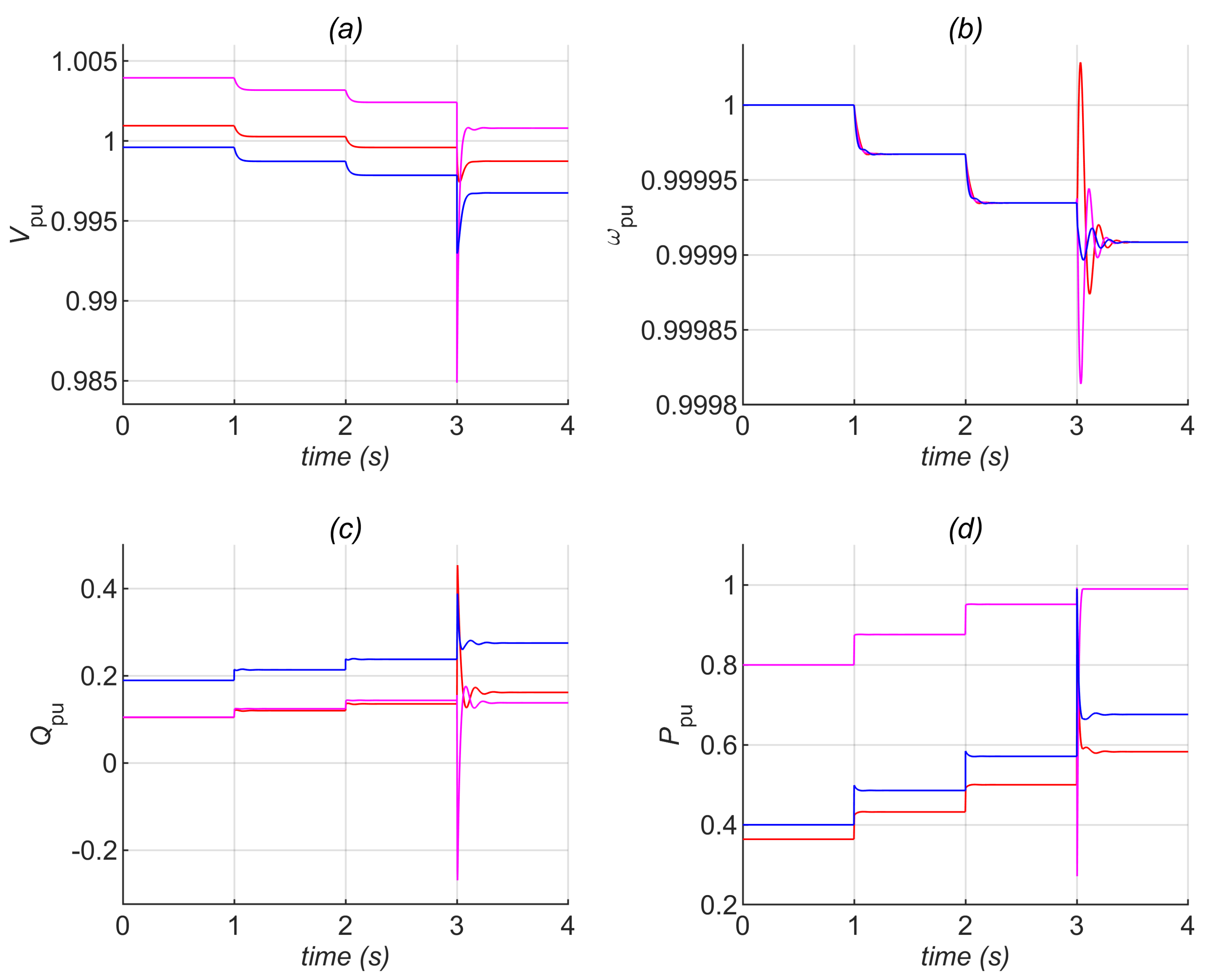
4.1.2. Voltage and Frequency Regulation
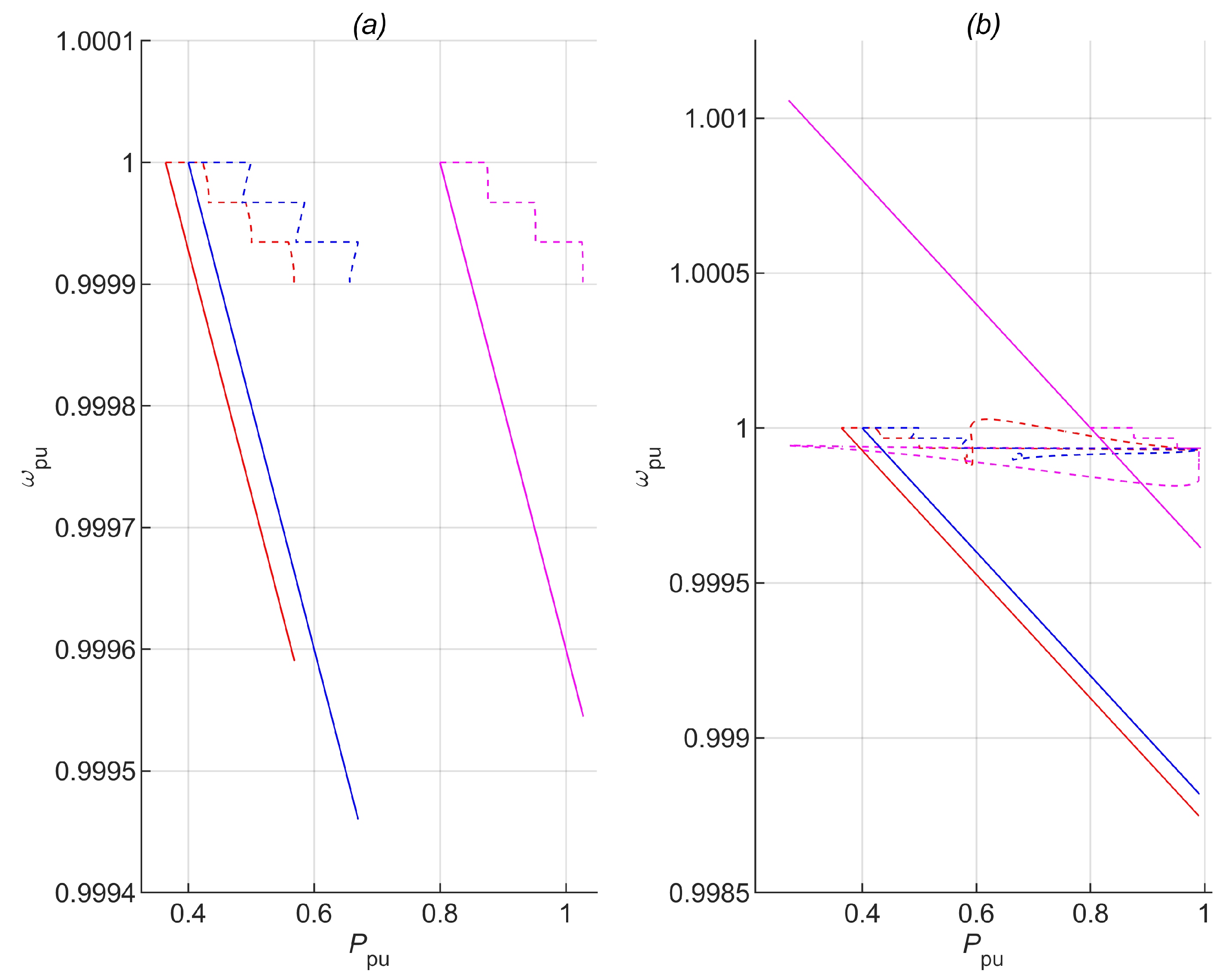
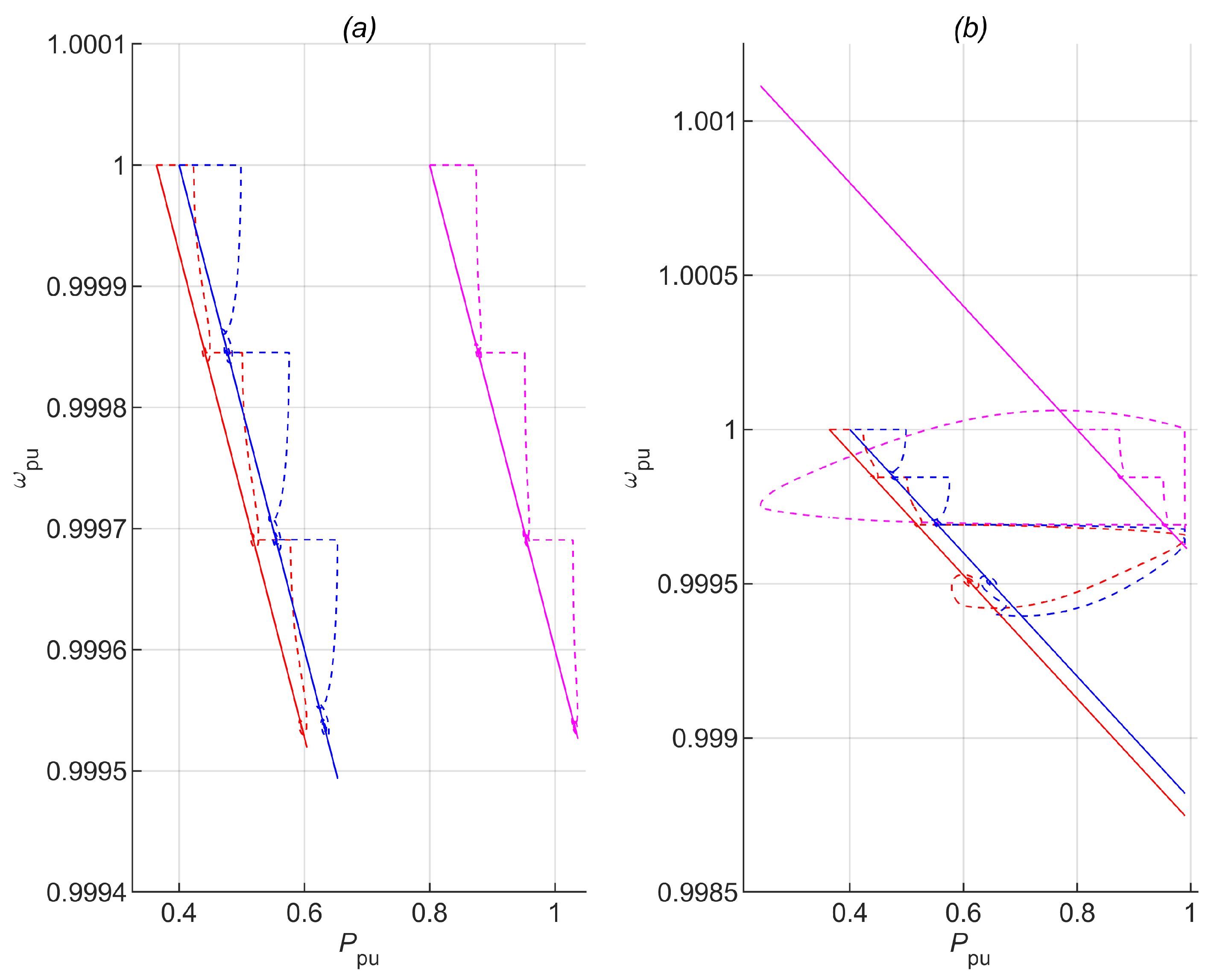
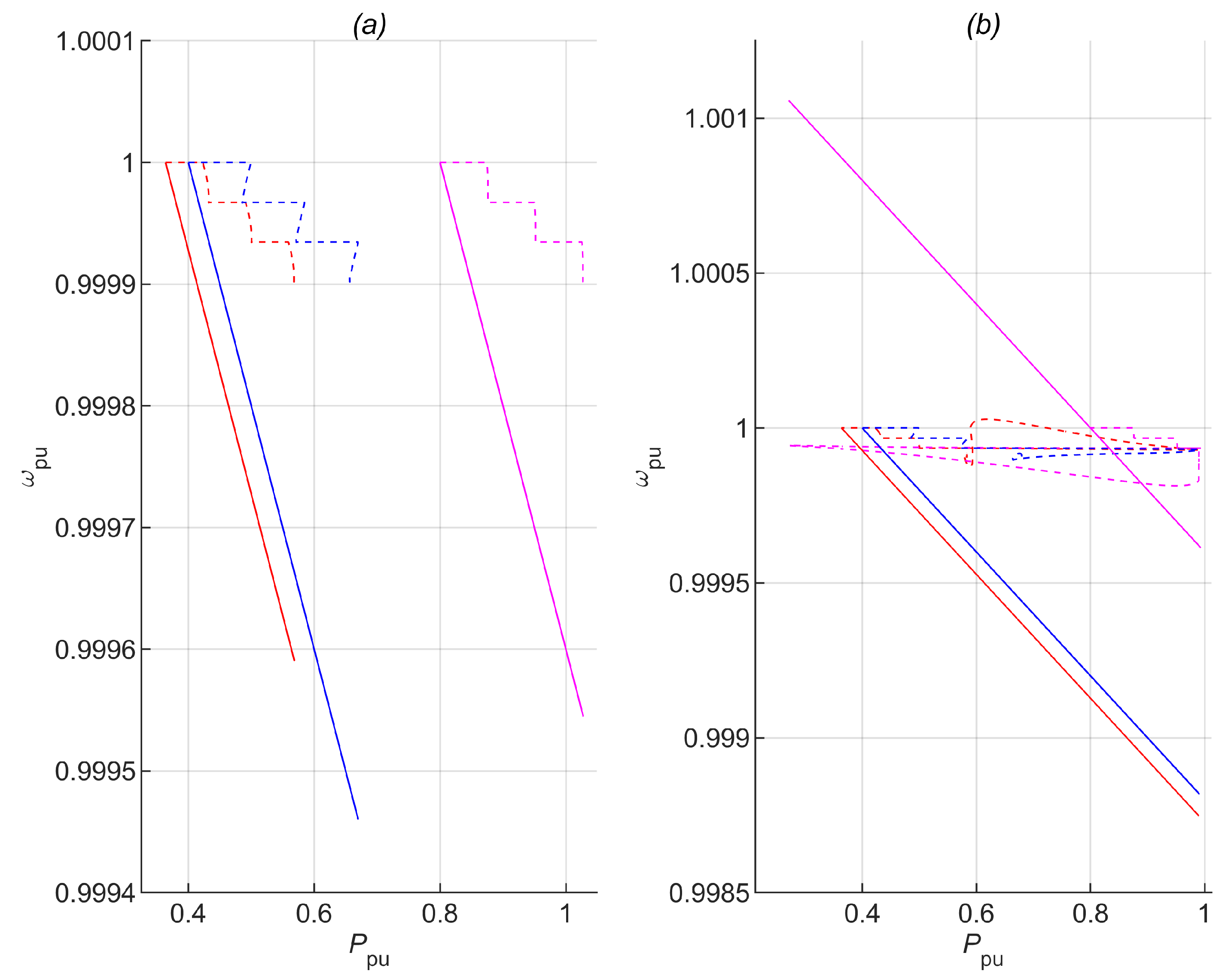
4.1.3. Application of the Jacobian-Based Method
4.2. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lasseter, R.H. Microgrids. In Proceedings of the 2002 IEEE Power Engineering Society Winter Meeting, New York, NY, USA, 27–31 January 2002; pp. 305–308. [Google Scholar]
- Sen, S.; Kumar, V. Microgrid modelling: A comprehensive survey. Annu. Rev. Control 2018, 46, 216–250. [Google Scholar] [CrossRef]
- Arani, A.A.K.; Gharehpetian, G.B.; Abedi, M. Review on energy storage systems control methods in microgrids. Int. J. Electr. Power Energy Syst. 2019, 107, 745–757. [Google Scholar] [CrossRef]
- Eyisi, C.; Al-Sumaiti, A.S.; Turitsyn, K.; Li, Q. Mathematical models for optimization of grid-integrated energy storage systems: A review. In Proceedings of the 2019 North American Power Symposium (NAPS), Wichita, KS, USA, 13–15 October 2019; pp. 1–5. [Google Scholar]
- Parhizi, S.; Lotfi, H.; Khodaei, A.; Bahramirad, S. State of the art in research on microgrids: A review. IEEE Access 2015, 3, 890–925. [Google Scholar] [CrossRef]
- Sen, S.; Kumar, V. Microgrid control: A comprehensive survey. Annu. Rev. Control 2018, 45, 118–151. [Google Scholar] [CrossRef]
- Farrokhabadi, M.; Cañizares, C.A.; Simpson-Porco, J.W.; Nasr, E.; Fan, L.; Mendoza-Araya, P.A.; Tonkoski, R.; Tamrakar, U.; Hatziargyriou, N.; Lagos, D.; et al. Microgrid stability definitions, analysis, and examples. IEEE Trans. Power Syst. 2020, 35, 13–29. [Google Scholar] [CrossRef]
- Schiffer, J.; Zonetti, D.; Ortega, R.; Stanković, A.M.; Sezi, T.; Raisch, J. A survey on modeling of microgrids—From fundamental physics to phasors and voltage sources. Automatica 2016, 74, 135–150. [Google Scholar] [CrossRef] [Green Version]
- Sahoo, S.K.; Sinha, A.K.; Kishore, N.K. Control techniques in AC, DC, and hybrid AC–DC microgrid: A review. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 738–759. [Google Scholar] [CrossRef]
- Olivares, D.E.; Mehrizi-Sani, A.; Etemadi, A.H.; Cañizares, C.A.; Iravani, R.; Kazerani, M.; Hajimiragha, A.H.; Gomis-Bellmunt, O.; Saeedifard, M.; Palma-Behnke, R.; et al. Trends in microgrid control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Han, H.; Hou, X.; Yang, J.; Wu, J.; Su, M.; Guerrero, J.M. Review of power sharing control strategies for islanding operation of AC microgrids. IEEE Trans. Smart Grid 2016, 7, 200–215. [Google Scholar] [CrossRef] [Green Version]
- Han, Y.; Li, H.; Shen, P.; Coelho, E.A.A.; Guerrero, J.M. Review of active and reactive power sharing strategies in hierarchical controlled microgrids. IEEE Trans. Power Electron. 2017, 32, 2427–2451. [Google Scholar] [CrossRef] [Green Version]
- Guerrero, J.M.; Chandorkar, M.; Lee, T.-L.; Loh, P.C. Advanced control architectures for intelligent microgrids—Part I: Decentralized and hierarchical control. IEEE Trans. Ind. Electron. 2013, 60, 1254–1262. [Google Scholar] [CrossRef] [Green Version]
- Eid, B.M.; Abd Rahim, N.; Selvaraj, J.; El Khateb, A.H. Control methods and objectives for electronically coupled distributed energy resources in microgrids: A review. IEEE Syst. J. 2016, 10, 446–458. [Google Scholar] [CrossRef]
- Ahn, S.-J.; Park, J.-W.; Chung, I.-Y.; Moon, S.-I.; Kang, S.-H.; Nam, S.-R. Power-sharing method of multiple distributed generators considering control modes and configurations of a microgrid. IEEE Trans. Power Deliv. 2010, 25, 2007–2016. [Google Scholar] [CrossRef]
- Chandorkar, M.C.; Divan, D.M.; Adapa, R. Control of parallel connected inverters in standalone AC supply systems. IEEE Trans. Ind. Appl. 1993, 29, 136–143. [Google Scholar] [CrossRef]
- Vijay, A.S.; Dheer, D.K.; Tiwari, A.; Doolla, S. Performance evaluation of homogeneous and heterogeneous droop-based systems in microgrid—Stability and transient response perspective. IEEE Trans. Energy Convers. 2019, 34, 36–46. [Google Scholar] [CrossRef]
- Pogaku, N.; Prodanovic, M.; Green, T.C. Modeling, analysis and testing of autonomous operation of an inverter-based microgrid. IEEE Trans. Power Electron. 2007, 22, 613–625. [Google Scholar] [CrossRef] [Green Version]
- Mohamed, Y.A.-R.I.; El-Saadany, E.F. Adaptive decentralized droop controller to preserve power sharing stability of paralleled inverters in distributed generation microgrids. IEEE Trans. Power Electron. 2008, 23, 2806–2816. [Google Scholar] [CrossRef]
- Bottrell, N.; Prodanovic, M.; Green, T.C. Dynamic stability of a microgrid with an active load. IEEE Trans. Power Electron. 2013, 28, 5107–5119. [Google Scholar] [CrossRef] [Green Version]
- Rasheduzzaman, M.; Mueller, J.A.; Kimball, J.W. An accurate small-signal model of inverter-dominated islanded microgrids using dq reference frame. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 1070–1080. [Google Scholar] [CrossRef]
- Luo, L.; Dhople, S.V. Spatiotemporal model reduction of inverter-based islanded microgrids. IEEE Trans. Energy Convers. 2014, 29, 823–832. [Google Scholar] [CrossRef] [Green Version]
- Nikolakakos, I.P.; Zeineldin, H.H.; El-Moursi, M.S.; Hatziargyriou, N.D. Stability evaluation of interconnected multi-inverter microgrids through critical clusters. IEEE Trans. Power Syst. 2016, 31, 3060–3072. [Google Scholar] [CrossRef]
- Rasheduzzaman, M.; Mueller, J.A.; Kimball, J.W. Reduced-order small-signal model of microgrid systems. IEEE Trans. Sustain. Energy 2015, 6, 1292–1305. [Google Scholar] [CrossRef]
- Vorobev, P.; Huang, P.-H.; Al Hosani, M.; Kirtley, J.L.; Turitsyn, K. High-fidelity model order reduction for microgrids stability assessment. IEEE Trans. Power Syst. 2018, 33, 874–887. [Google Scholar] [CrossRef] [Green Version]
- Piagi, P.; Lasseter, R.H. Autonomous control of microgrids. In Proceedings of the 2006 IEEE Power Engineering Society General Meeting, Montreal, QC, Canada, 18–22 June 2006; pp. 1–8. [Google Scholar]
- Kang, H.-K.; Ahn, S.-J.; Moon, S.-I. A new method to determine the droop of inverter-based DGs. In Proceedings of the 2009 IEEE Power & Energy Society General Meeting, Calgary, AB, Canada, 26–30 July 2009; pp. 1–6. [Google Scholar]
- Du, W.; Lasseter, R.H.; Khalsa, A.S. Survivability of autonomous microgrid during overload events. IEEE Trans. Smart Grid 2019, 10, 3515–3524. [Google Scholar] [CrossRef]
- Shuai, Z.; Sun, Y.; Shen, Z.J.; Tian, W.; Tu, C.; Li, Y.; Yin, X. Microgrid stability: Classification and a review. Renew. Sustain. Energy Rev. 2016, 58, 167–179. [Google Scholar] [CrossRef]
- D’Arco, S.; Suul, J.A. Virtual synchronous machines—Classification of implementations and analysis of equivalence to droop controllers for microgrids. In Proceedings of the 2013 IEEE Grenoble Conference, Grenoble, France, 16–20 June 2013; pp. 1–7. [Google Scholar]
- Beck, H.-P.; Hesse, R. Virtual synchronous machine. In Proceedings of the 2007 9th International Conference on Electrical Power Quality and Utilisation, Barcelona, Spain, 9–11 October 2007; pp. 1–6. [Google Scholar]
- Soni, N.; Doolla, S.; Chandorkar, M.C. Inertia design methods for islanded microgrids having static and rotating energy sources. IEEE Trans. Ind. Appl. 2016, 52, 5165–5174. [Google Scholar] [CrossRef]
- Liu, J.; Miura, Y.; Ise, T. Comparison of dynamic characteristics between virtual synchronous generator and droop control in inverter-based distributed generators. IEEE Trans. Power Electron. 2016, 3, 3600–3611. [Google Scholar] [CrossRef]
- Alsiraji, H.A.; El-Shatshat, R. Comprehensive assessment of virtual synchronous machine based voltage source converter controllers. IET Gener. Transm. Distrib. 2017, 11, 1762–1769. [Google Scholar] [CrossRef]
- Eyisi, C.; Tian, G.; Vorobev, P.; Li, Q. Load Sharing Strategy Incorporating Power Limits in Islanded Inverter-Based Microgrids. In Proceedings of the 2020 IEEE Electric Power and Energy Conference (EPEC), Edmonton, AB, Canada, 9–10 November 2020; pp. 1–6. [Google Scholar]
- De Brabandere, K.; Bolsens, B.; Van den Keybus, J.; Woyte, A.; Driesen, J.; Bemlans, R. A voltage and frequency droop control method for parallel inverters. IEEE Trans. Power Electron. 2007, 22, 1107–1115. [Google Scholar] [CrossRef]
- Qunais, T.; Karimi-Ghartemani, M. Systematic modeling of a class of microgrids and its application to impact analysis of cross-coupling droop terms. IEEE Trans. Energy Convers. 2019, 34, 1632–1643. [Google Scholar] [CrossRef]
- Raman, G.; Peng, J.C.-H. Mitigating stability issues due to line dynamics in droop-controlled multi-inverter systems. IEEE Trans. Power Syst. 2020, 35, 2082–2092. [Google Scholar] [CrossRef]
- Mohan, N. Electric Power Systems: A First Course; John Wiley & Sons: Hoboken, NJ, USA, 2012; pp. 178–188. [Google Scholar]
- Hou, X.; Sun, Y.; Zhang, X.; Lu, J.; Wang, P.; Guerrero, J.M. Improvement of frequency regulation in VSG-based AC microgrid via adaptive virtual inertia. IEEE Trans. Power Electron. 2020, 35, 1589–1602. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description (Value) |
|---|---|
| Inverter Base Apparent Power (10 kVA) | |
| Nominal Voltage (381 V) | |
| Nominal Frequency ( rad/s) | |
| Filter Constant ( rad/s/W) | |
| Droop Gain ( rad/s/W), | |
| i.e., ( at = 10 kW) | |
| Droop Gain ( V/Var), | |
| i.e., ( at = 10 kVar) | |
| Line Resistance ( /km) | |
| Line Inductance ( mH/km) | |
| Line Length in km () | |
| Load Resistance ( ) | |
| Load Inductance ( mH) |
| Parameter | Description (Value) |
|---|---|
| Nominal System Frequency () | |
| Voltage at PCC () | |
| Voltage Angle in rad at PCC () | |
| Bus a Voltages () | |
| Bus a Voltage Angles in rad () | |
| Nominal a-VSI Voltage Setpoints () | |
| Nominal a-VSI Frequency Setpoints | |
| () | |
| a-VSI Power Outputs (, | |
| , ) | |
| Line a Currents (, | |
| , ) | |
| Load Current () |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Eyisi, C.; Li, Q. Load Sharing Scheme Incorporating Power Security Margins for Parallel Operation of Voltage Source Inverters. Energies 2021, 14, 5825. https://doi.org/10.3390/en14185825
Eyisi C, Li Q. Load Sharing Scheme Incorporating Power Security Margins for Parallel Operation of Voltage Source Inverters. Energies. 2021; 14(18):5825. https://doi.org/10.3390/en14185825
Chicago/Turabian StyleEyisi, Chiebuka, and Qifeng Li. 2021. "Load Sharing Scheme Incorporating Power Security Margins for Parallel Operation of Voltage Source Inverters" Energies 14, no. 18: 5825. https://doi.org/10.3390/en14185825
APA StyleEyisi, C., & Li, Q. (2021). Load Sharing Scheme Incorporating Power Security Margins for Parallel Operation of Voltage Source Inverters. Energies, 14(18), 5825. https://doi.org/10.3390/en14185825