
Configuration Method and Multi-Functional Strategy for Embedding Energy Storage into Wind Turbine

Abstract
:1. Introduction
- (1)
- An ES Configuration method is proposed, which allows a small ES capacity to assist the DFIG to meet the demands of system inertia and speed recovery at different wind speeds; and
- (2)
- A coordinated control strategy between wind turbines with ES is proposed, where the ES assists the DFIG to provide better frequency support and speed recovery capabilities at different wind speeds. The strategy uses the ES to smooth the wind power ramp events in the non-frequency modulation period, improving the wind power consumption and ES utilization.
2. Frequency Modulation Response Characteristics of DFIG
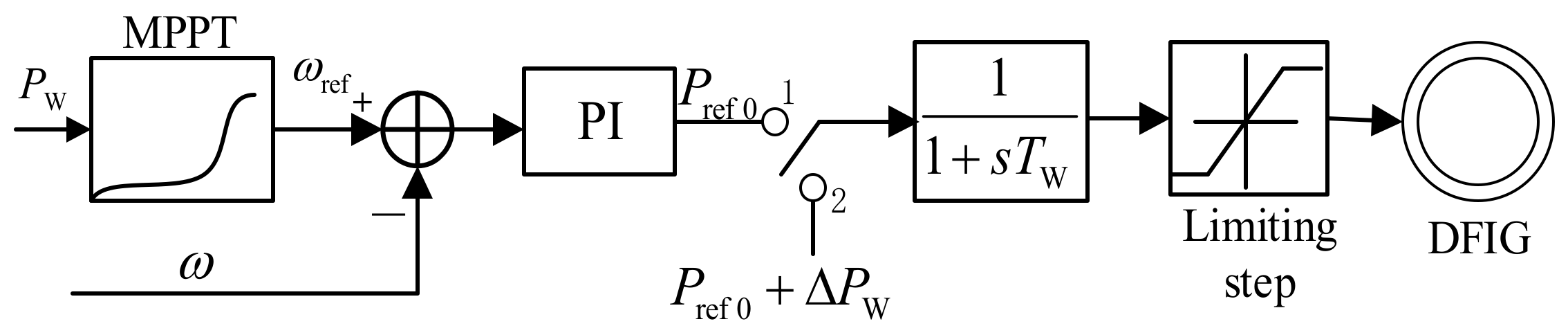
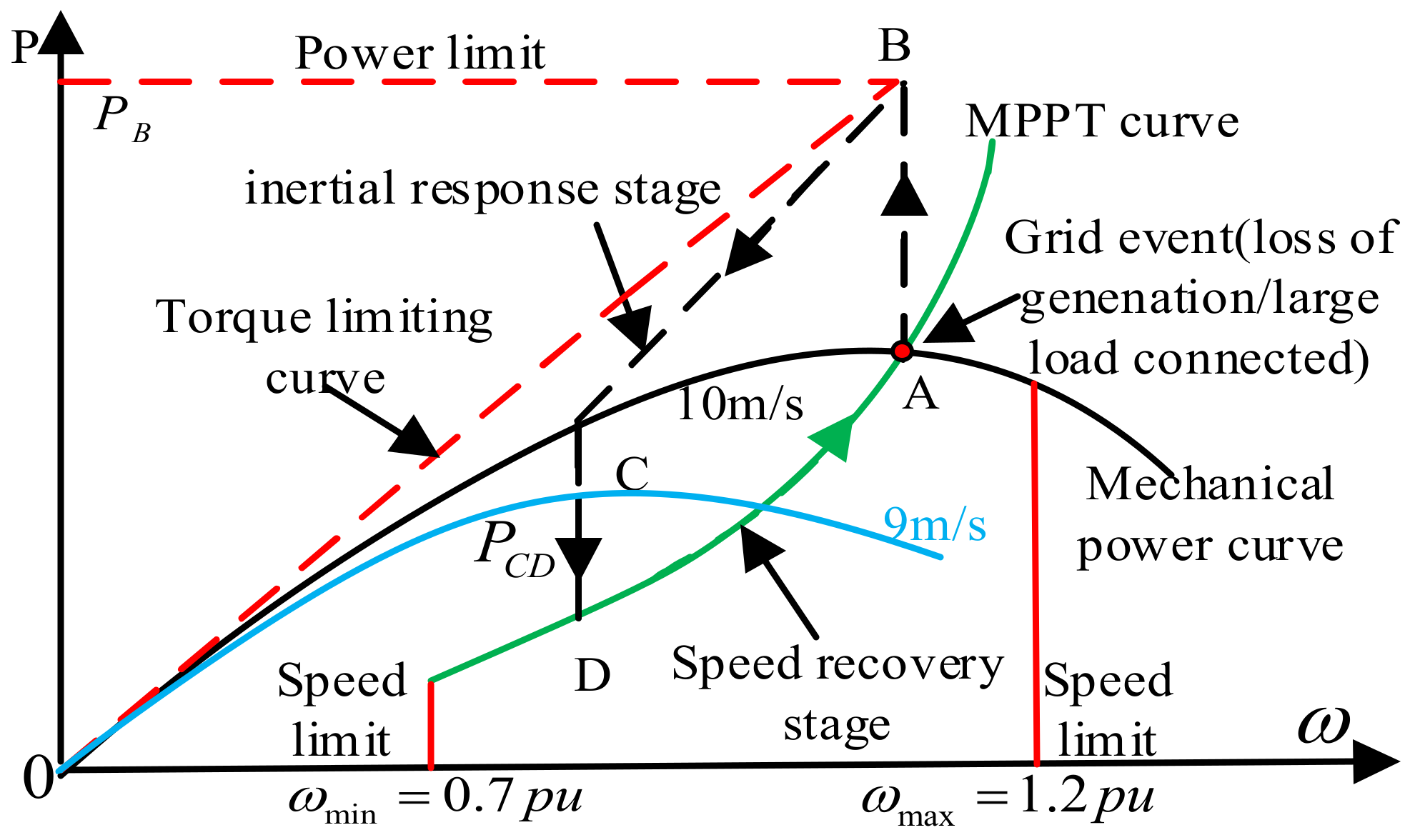
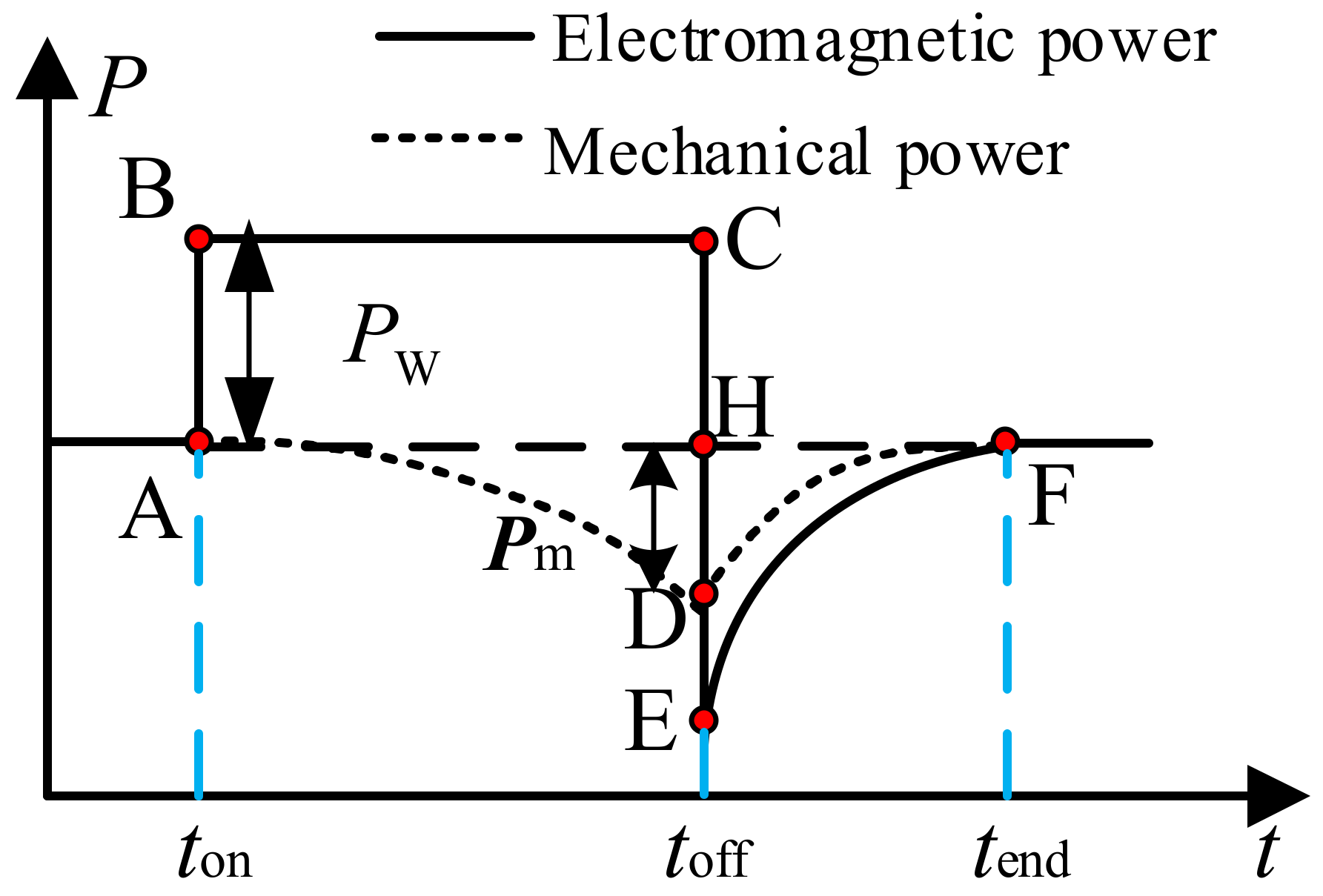
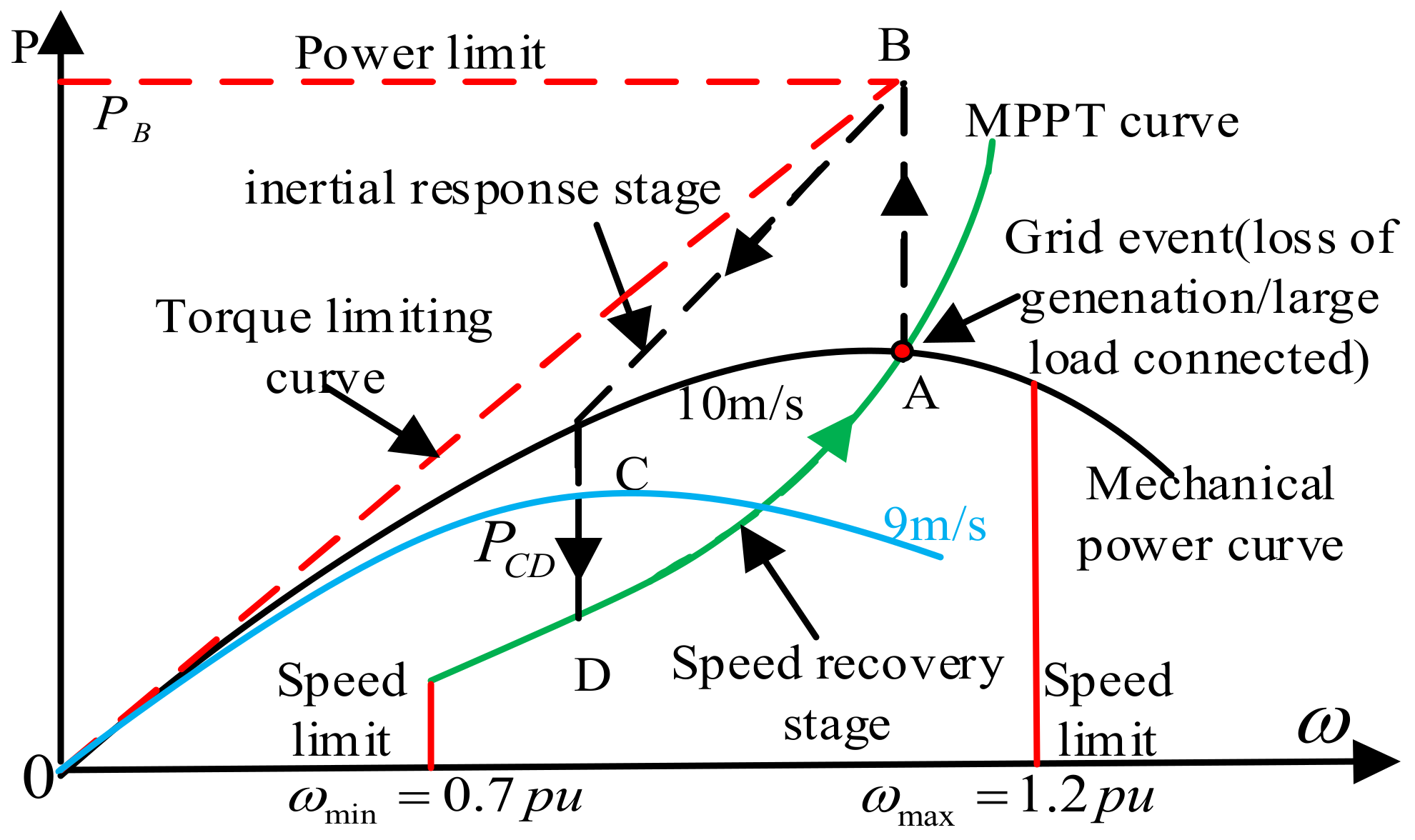
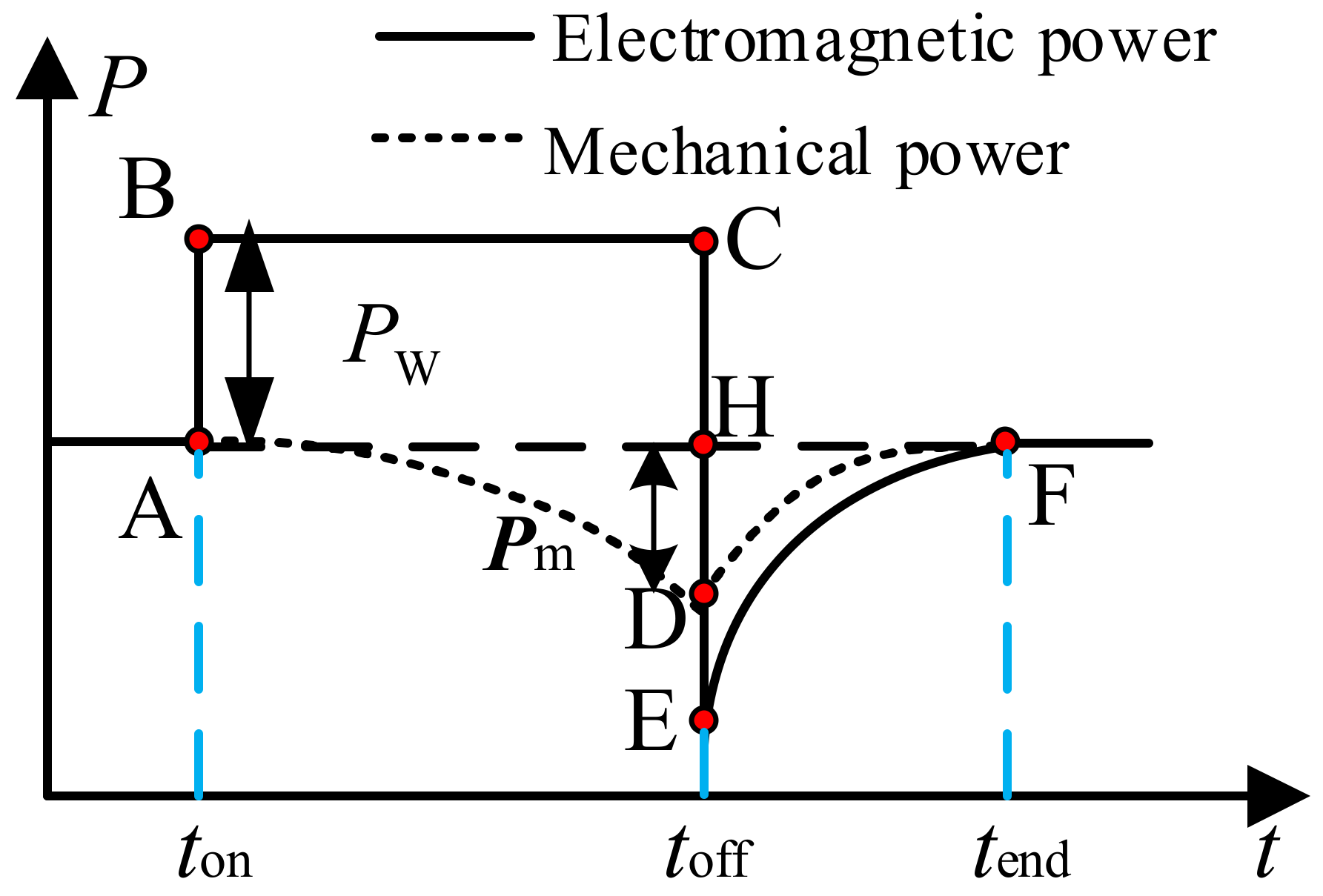
2.1. Dynamic Frequency Modulation Process of DFIG
2.2. Frequency Modulation Response Capability of DFIG
3. Strategies of ES Configuration and DFIG and ES Coordinated Control
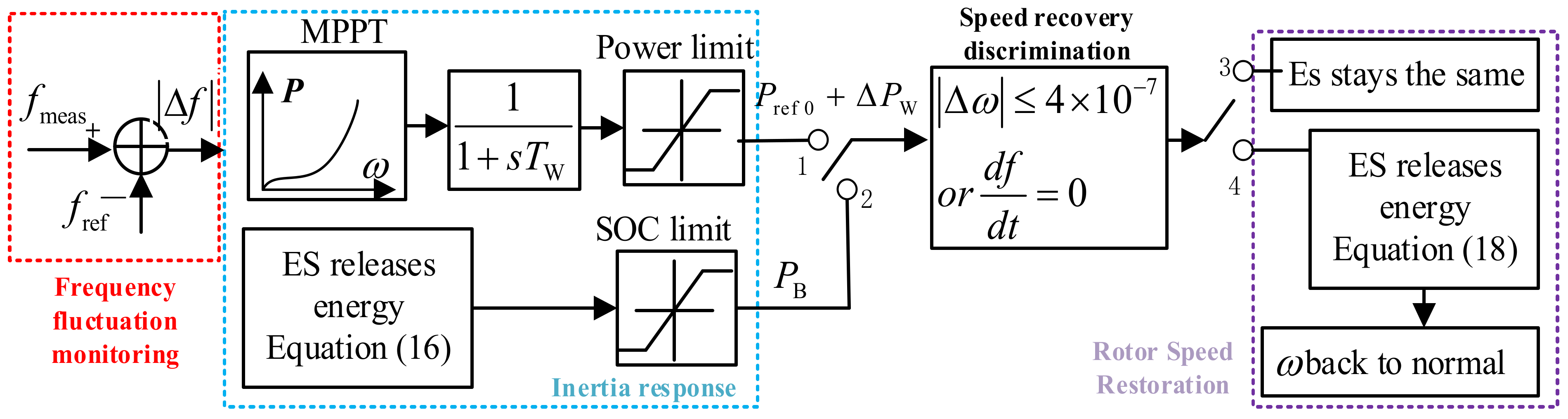
3.1. DFIG and ES Coordinated Control Strategy
- (1)
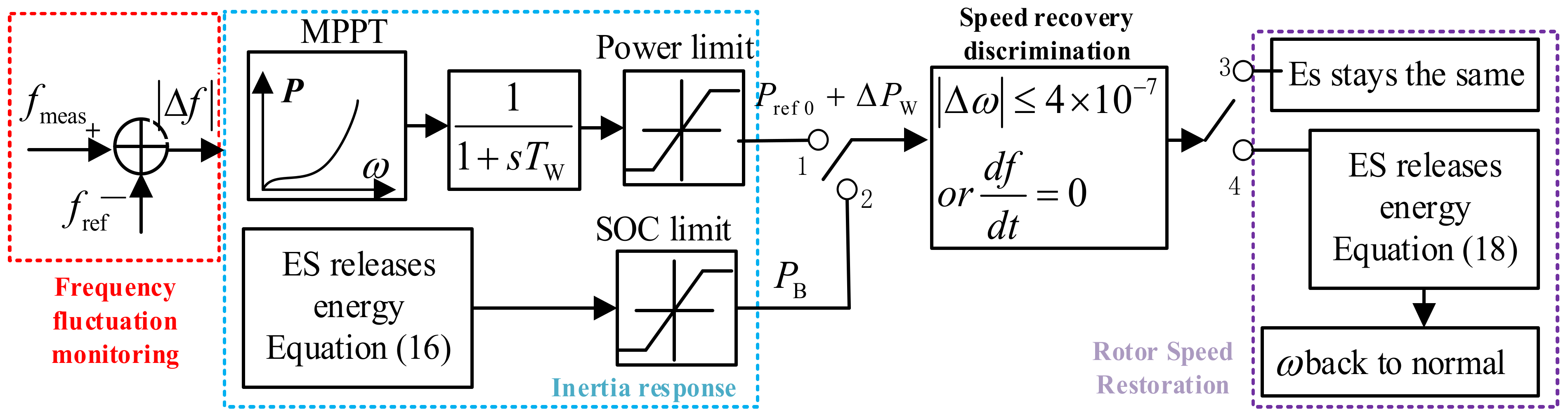
- When monitoring that the system frequency deviation Δf is greater than the dead zone, the DFIG and ES frequency modulation system starts.
- (2)
- Inertia response stage: at the low wind speed, the DFIG maintains the original operating state, and the ES provides the DFIG and ES system inertia if its state of charge (SOC) meets the requirements; at the medium wind speed, the DFIG provides the inertia, and the ES state remains unchanged.
- (3)
- Speed recovery stage: at the low wind speed, the running status of DFIG will not change, no need to restore speed; at the medium wind speed, the ES provides additional active power PCD to quickly restore the MPPT state of the DFIG when its SOC is more than the minimum value.

3.2. Frequency Modulation Demand Configuration of ES
3.2.1. Inertia Response Configuration
3.2.2. Speed Recovery Configuration
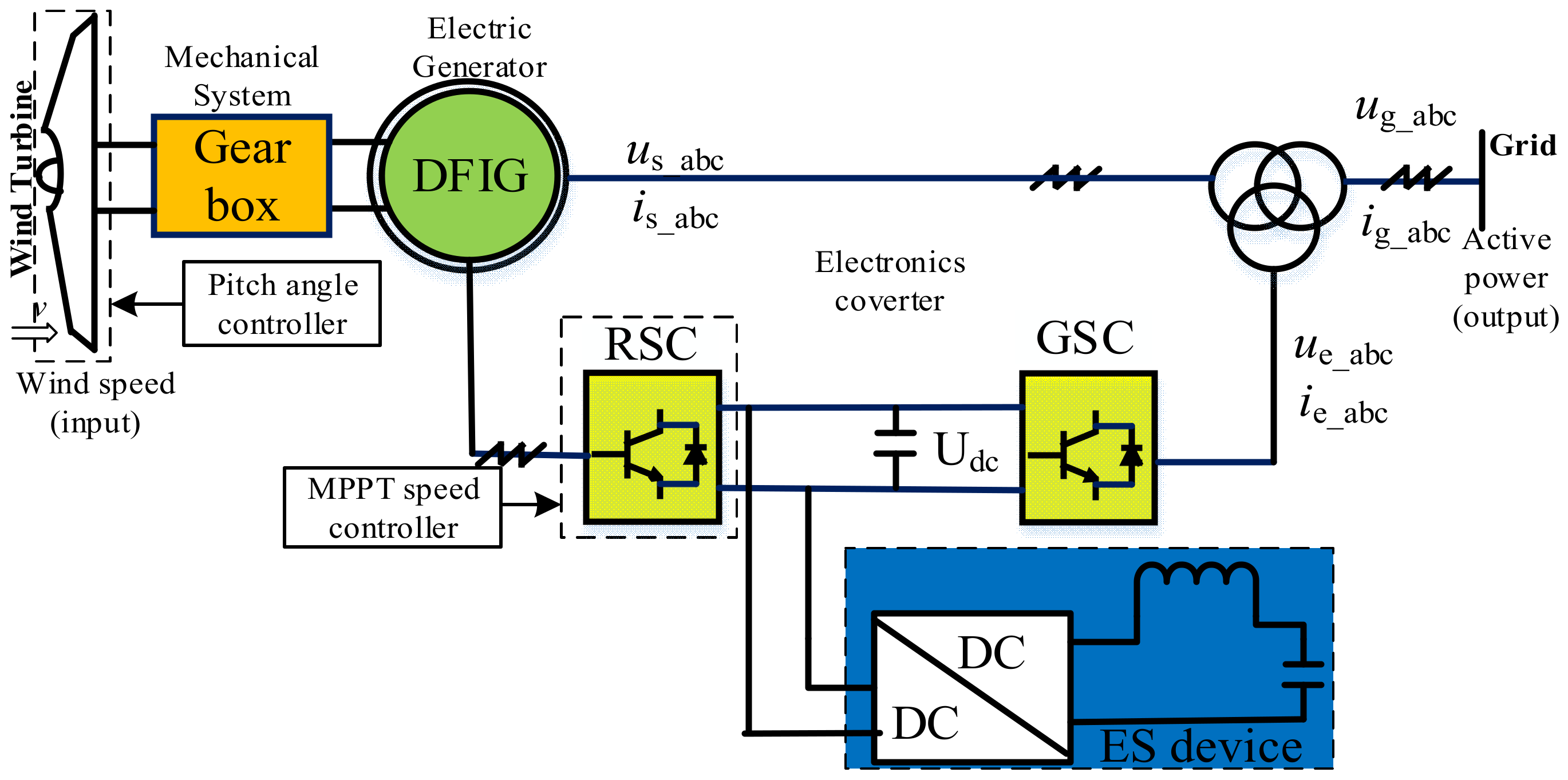
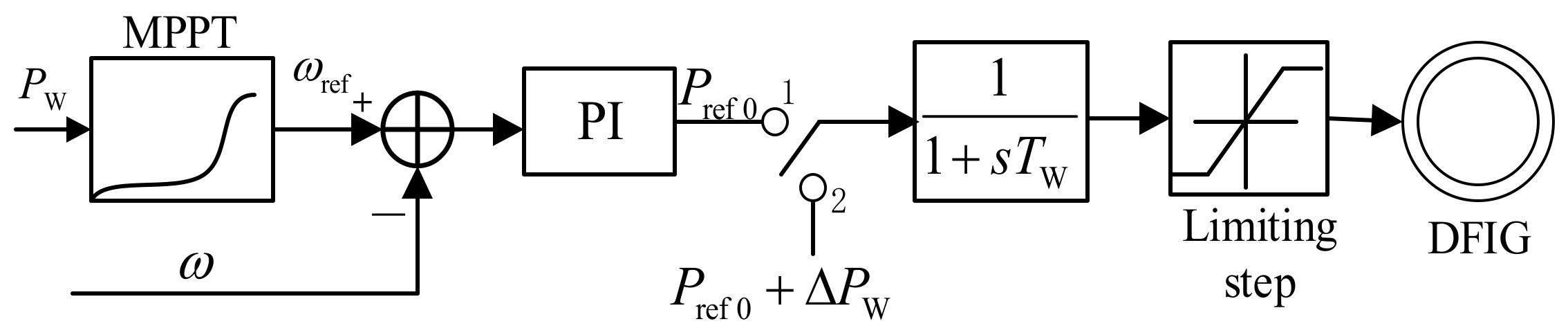
4. DFIG and ES System Structure Model
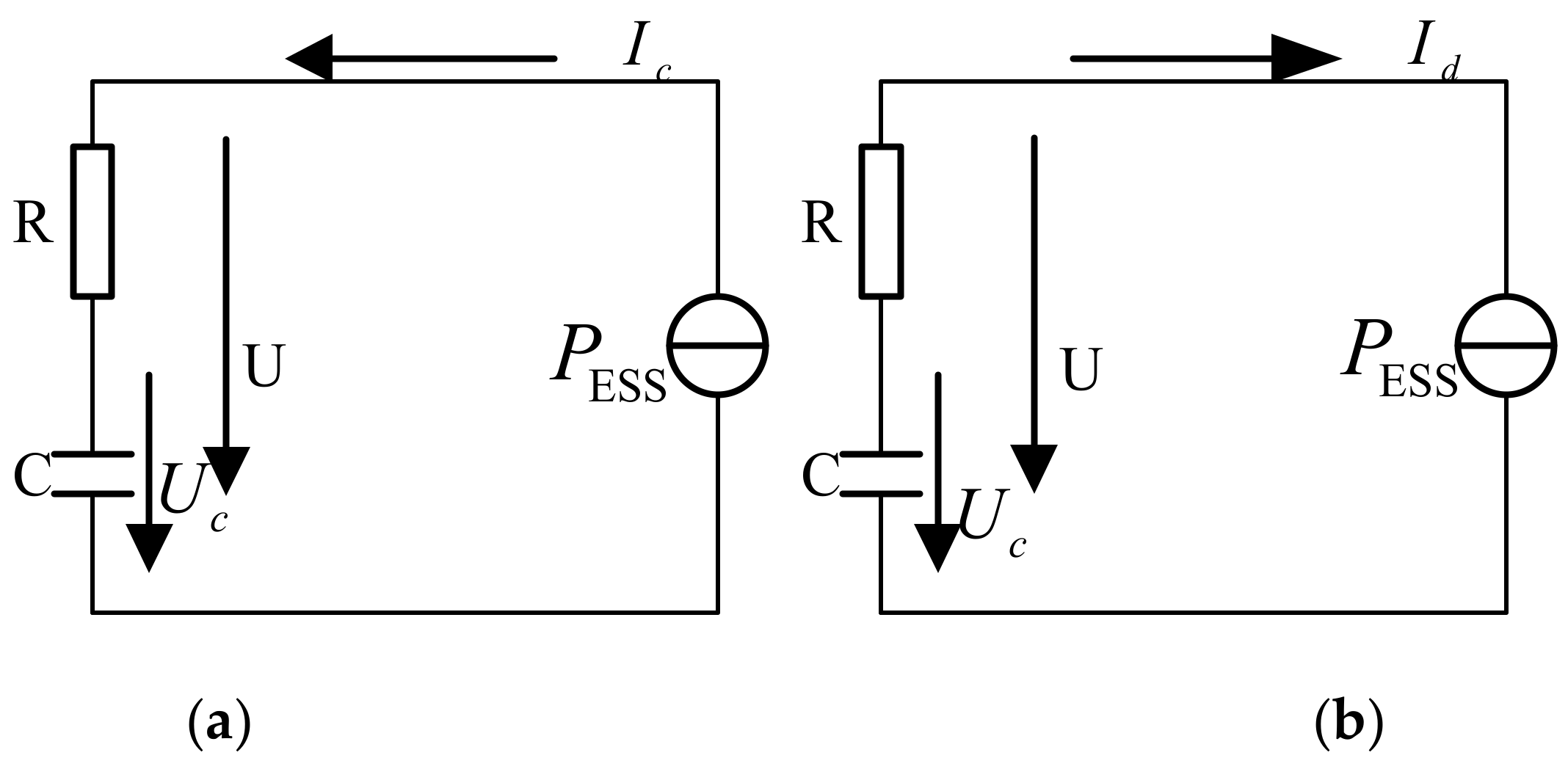
4.1. ES Selection
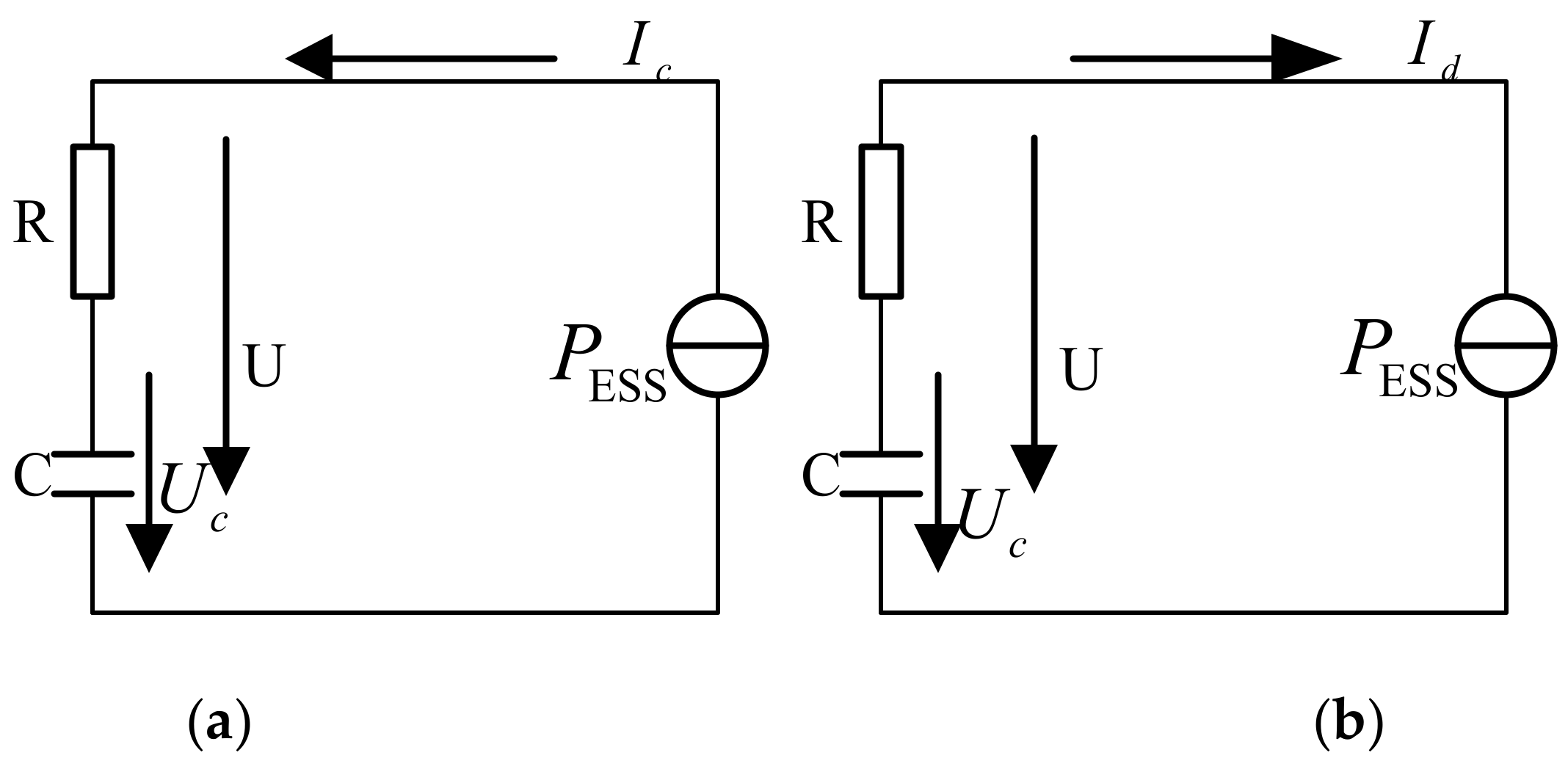
4.2. Safety Inspection
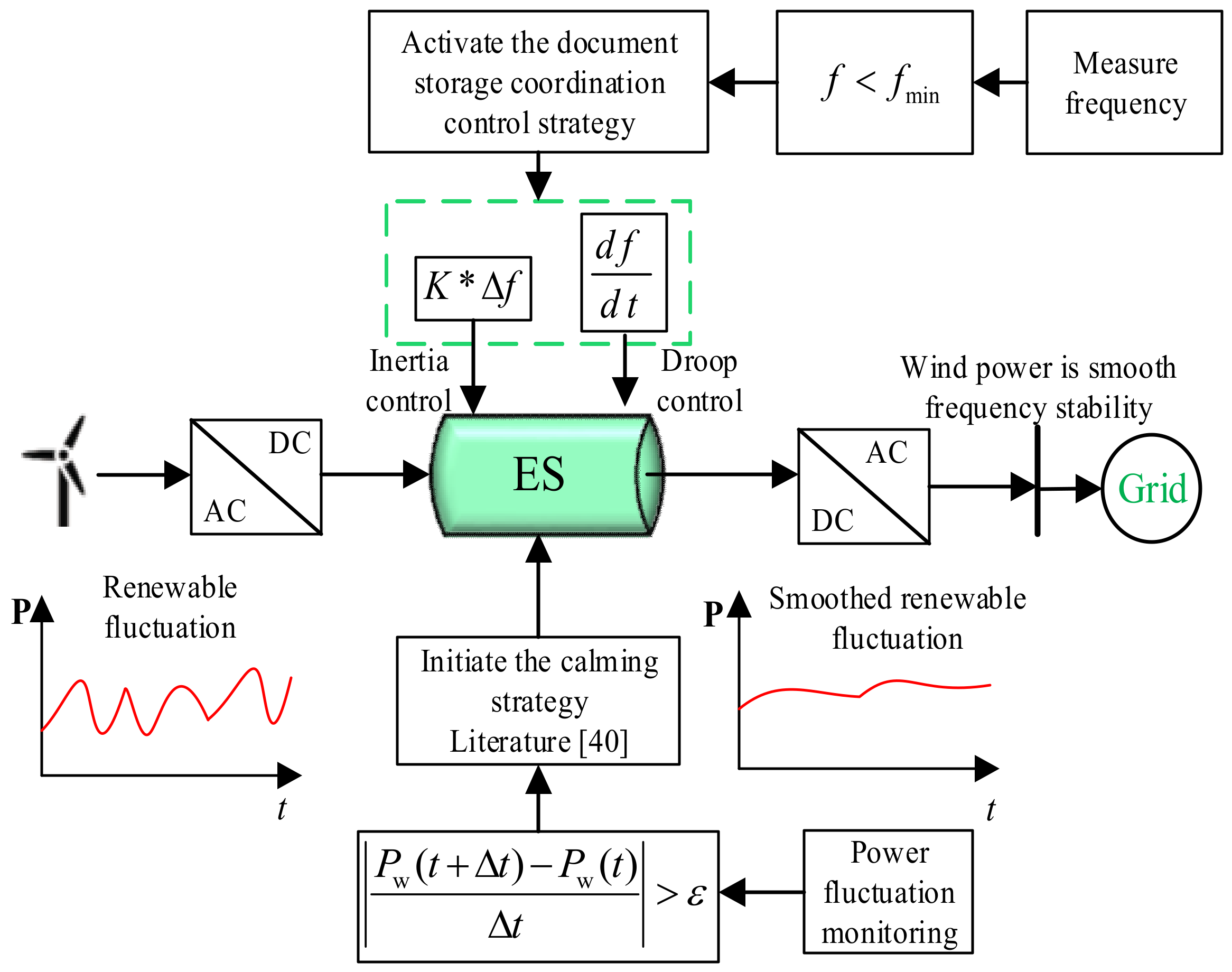
4.3. Multi-Functional Control Strategy of ES
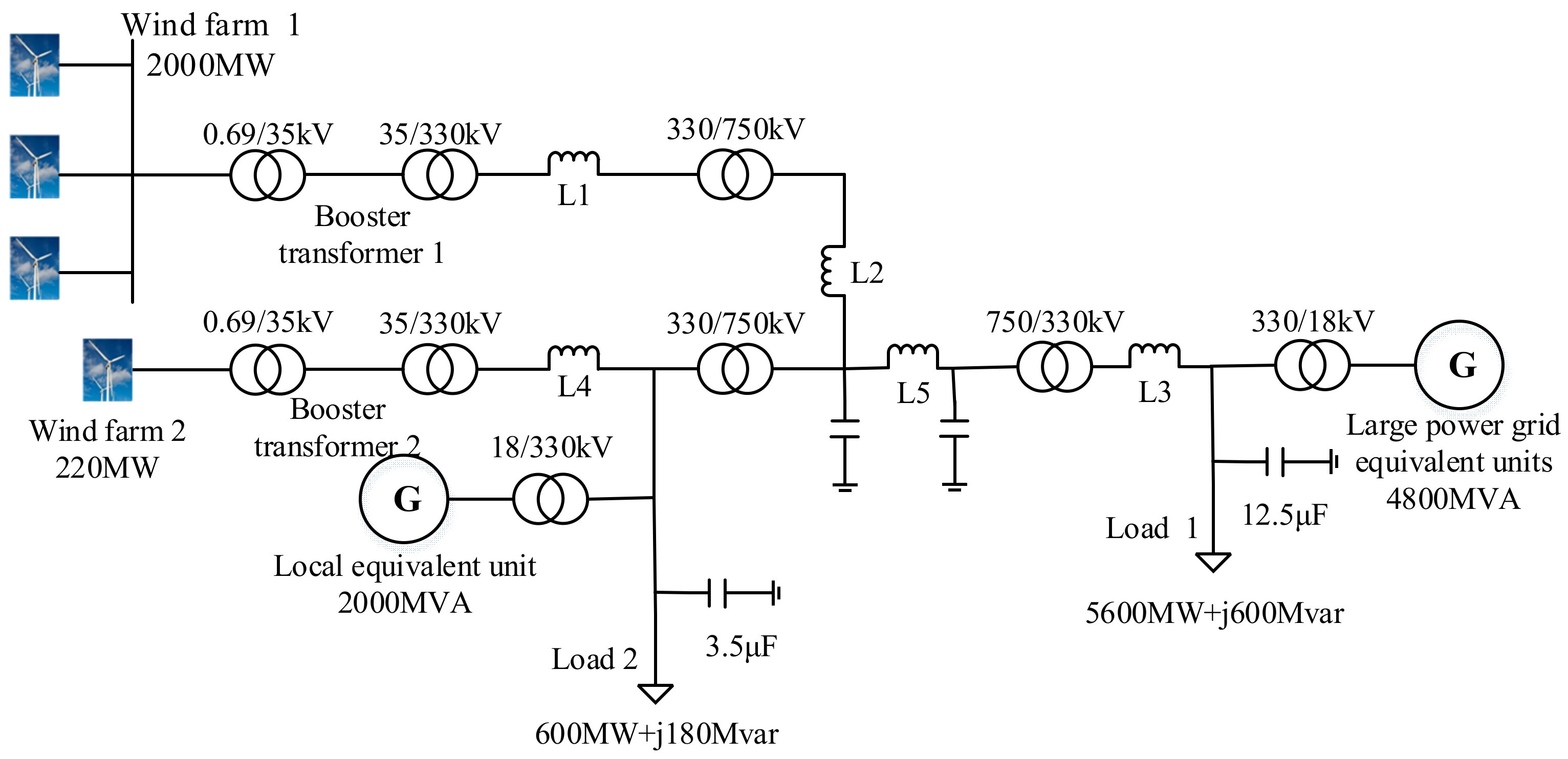
5. Simulation Analysis
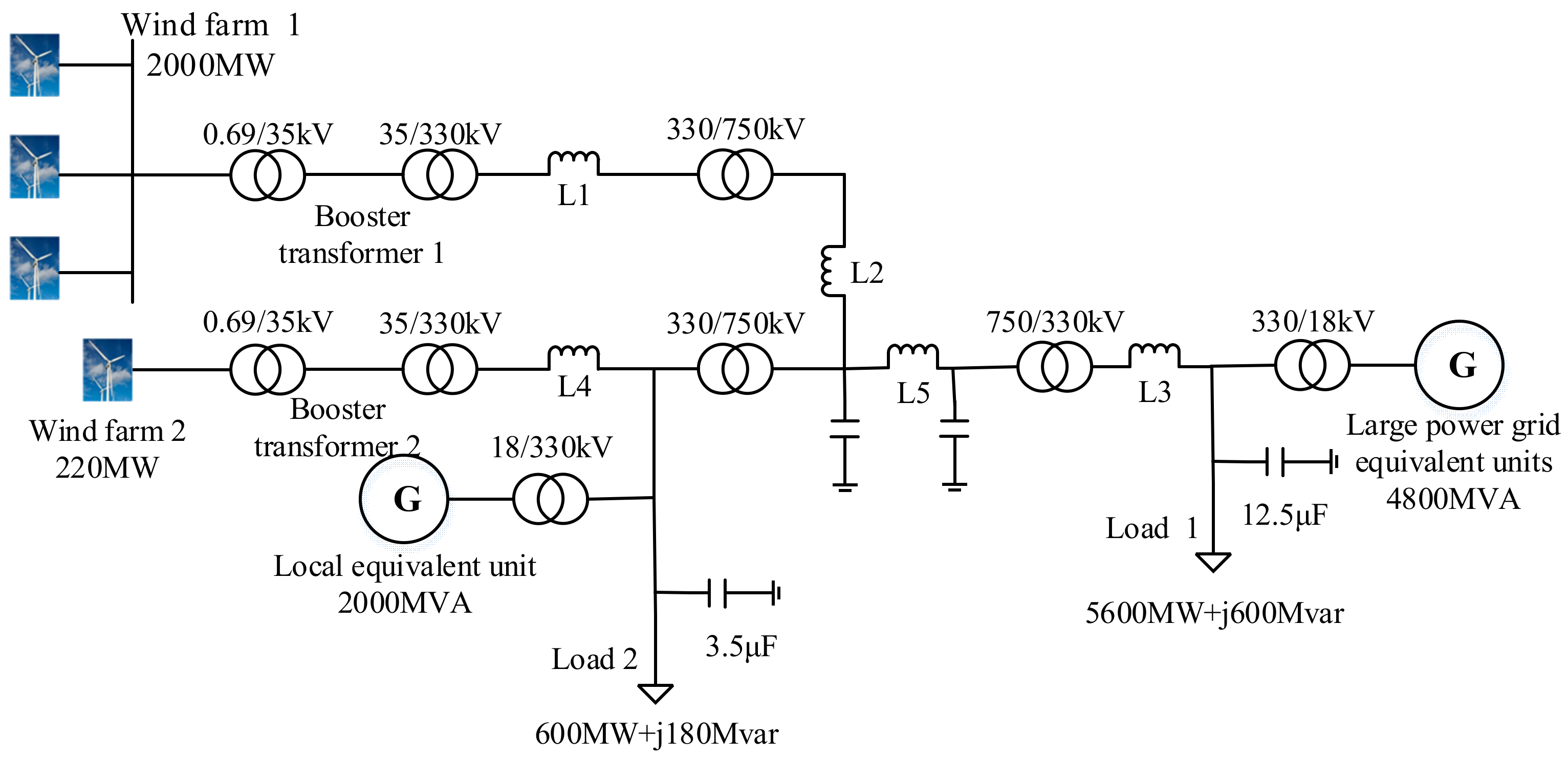
5.1. Simulation Parameters
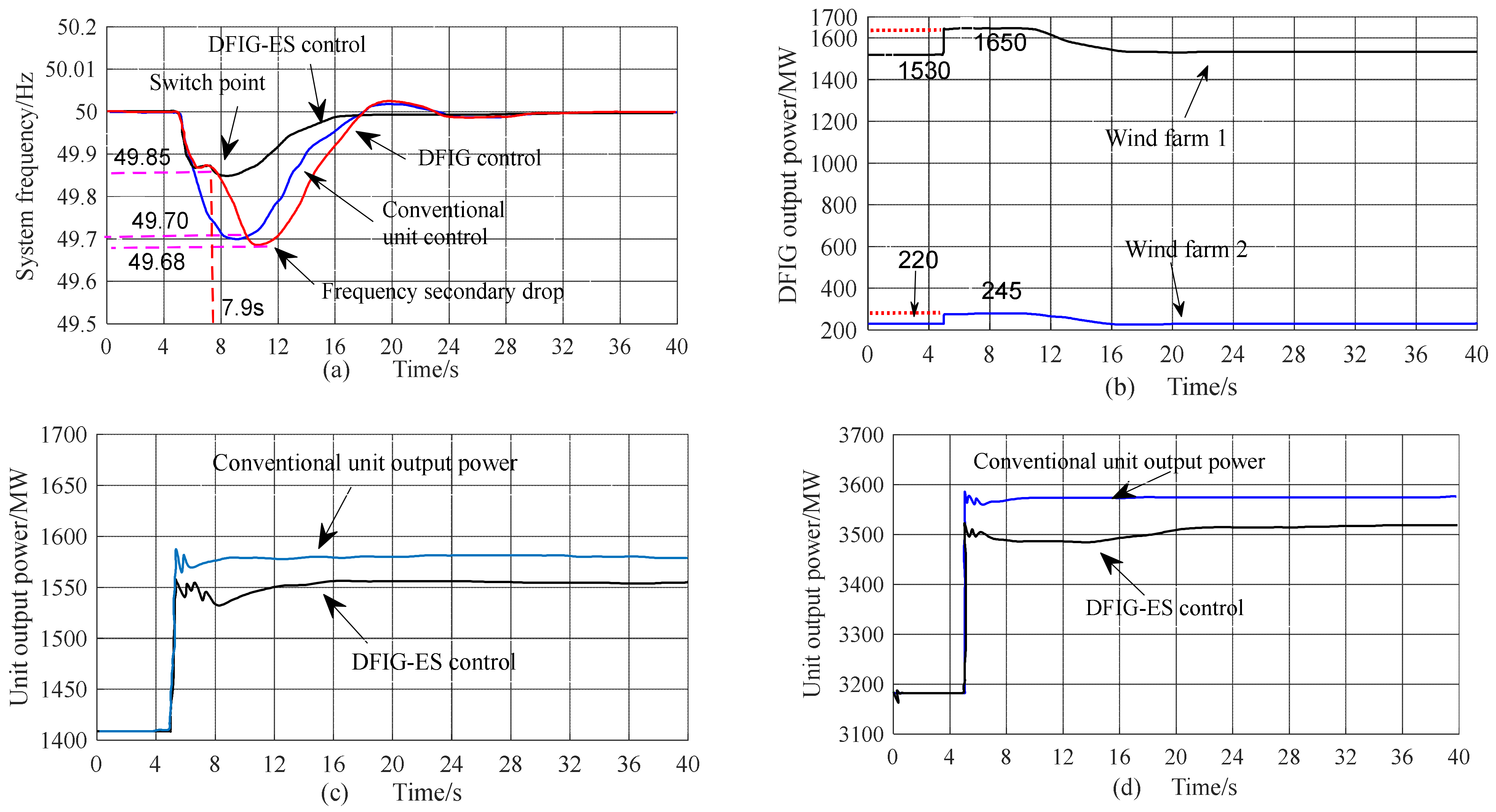
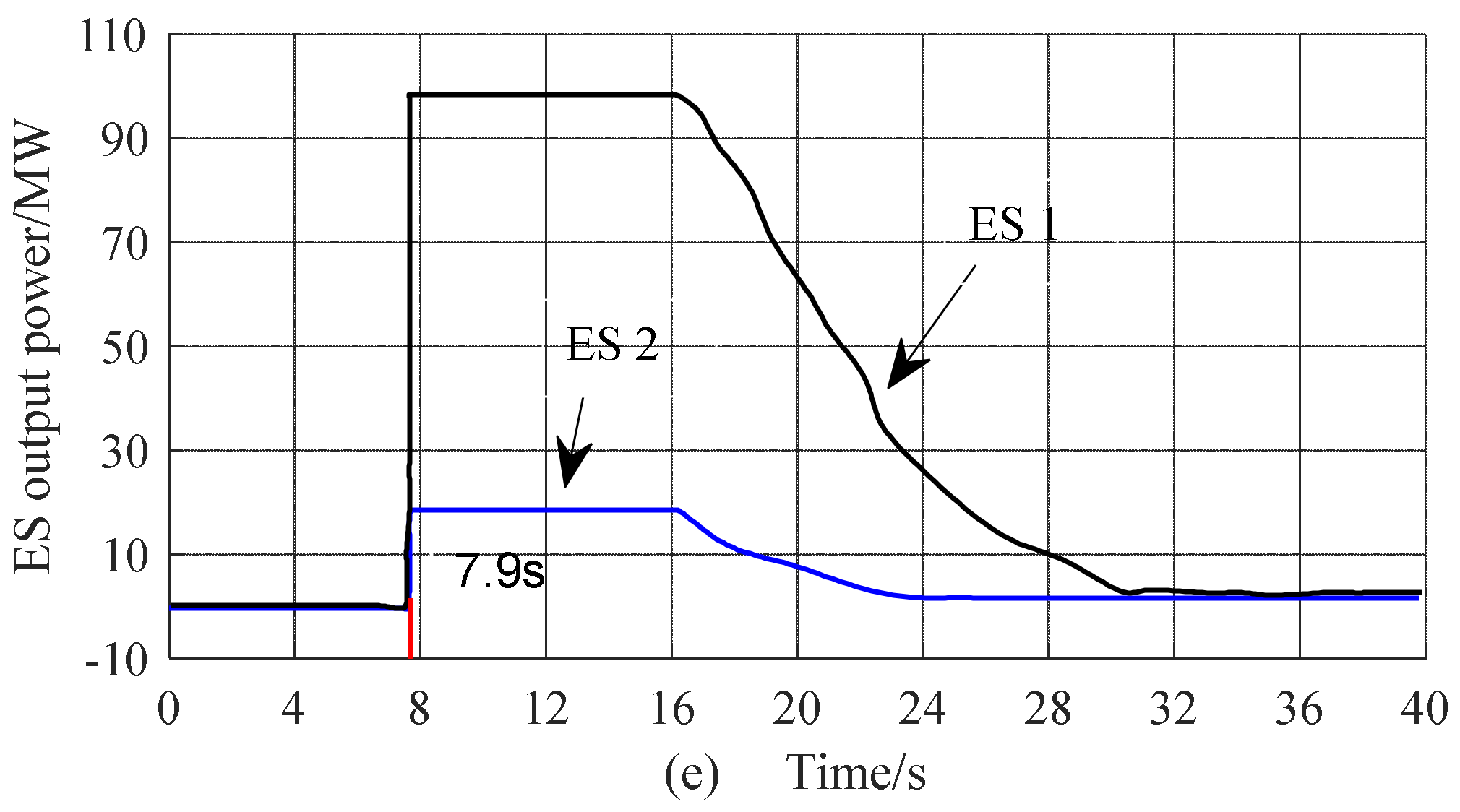
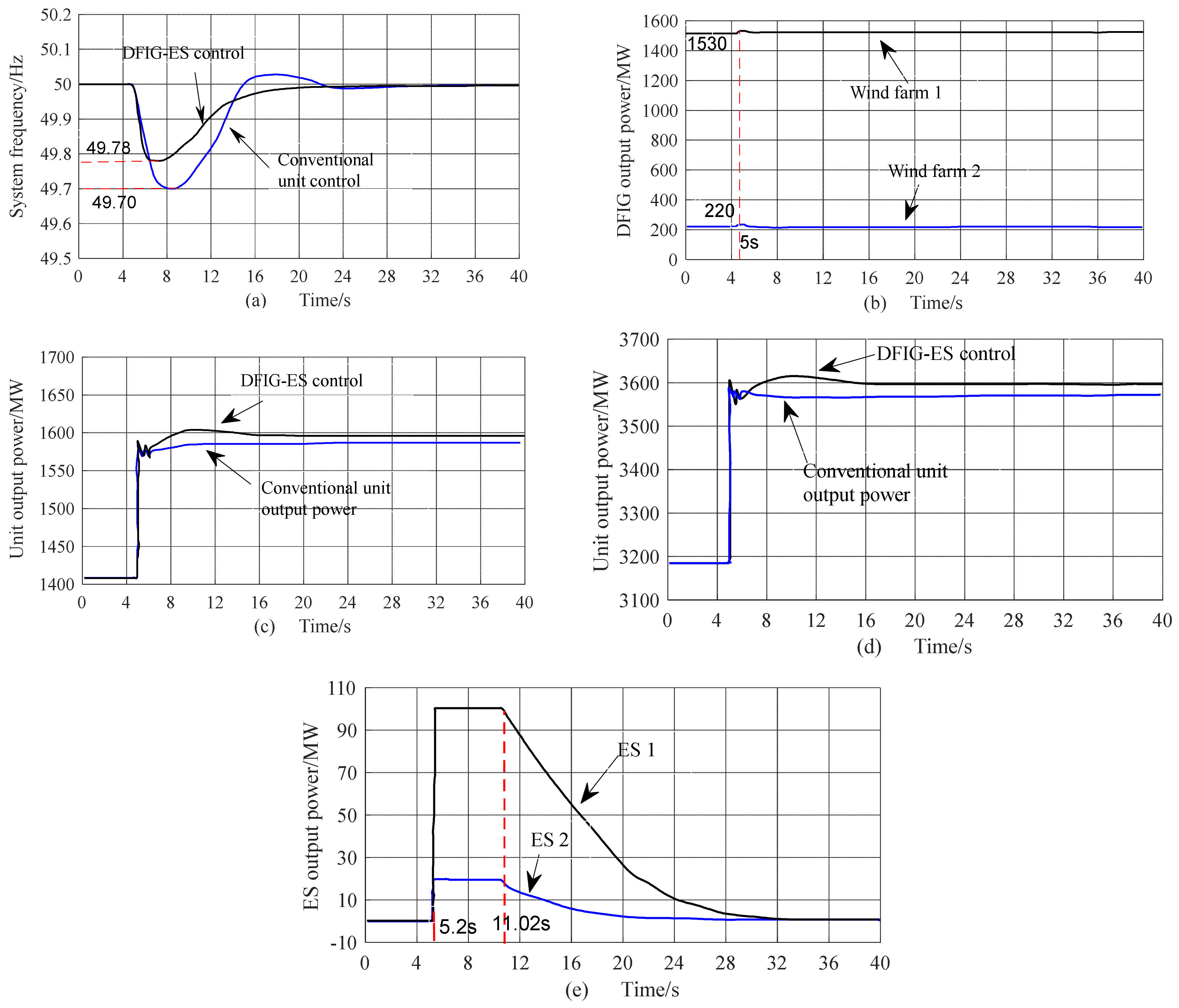
5.2. Load Step Disturbance at the Moderate Wind Speed
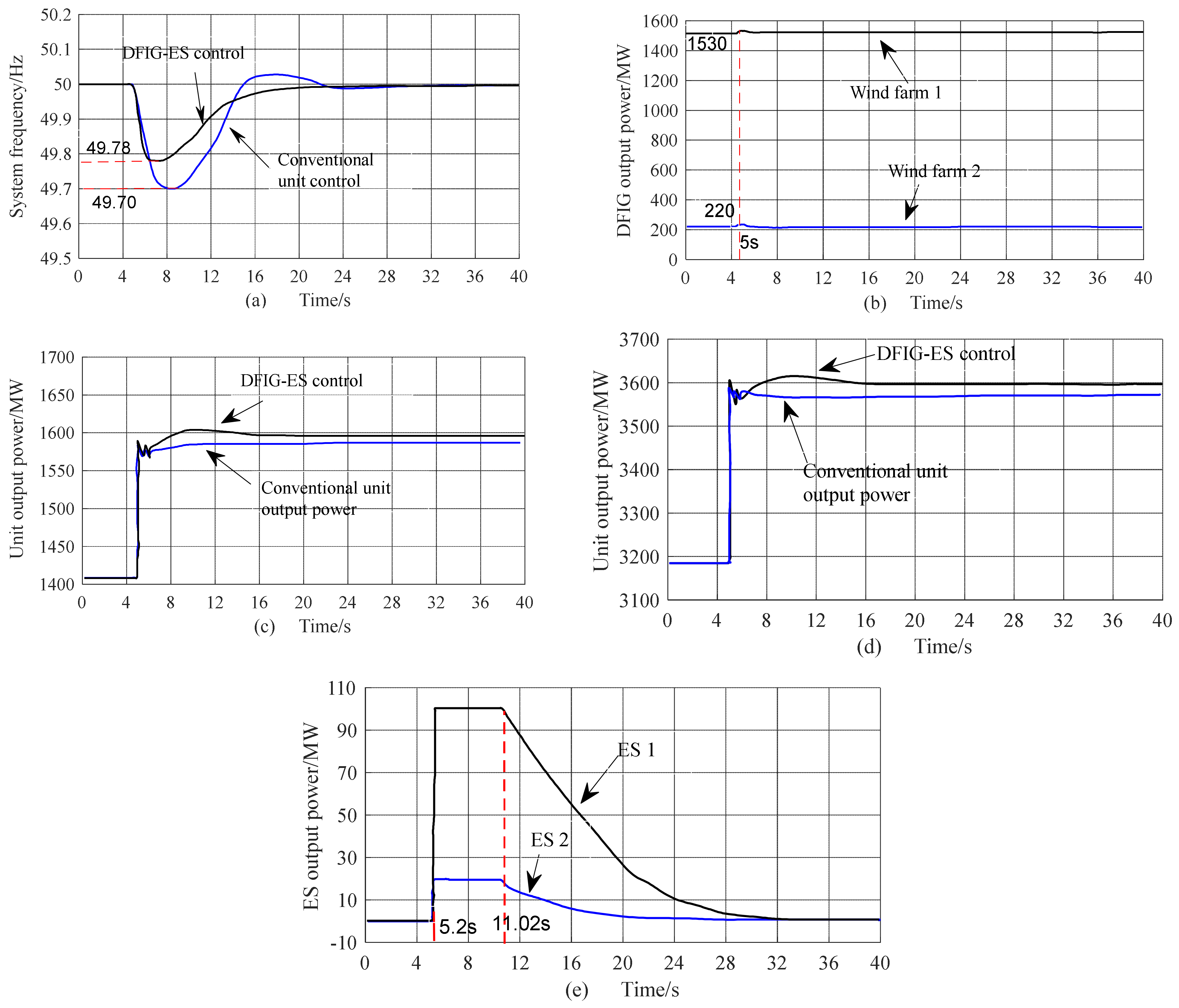
5.3. Load Step Disturbance at the Low Wind Speed
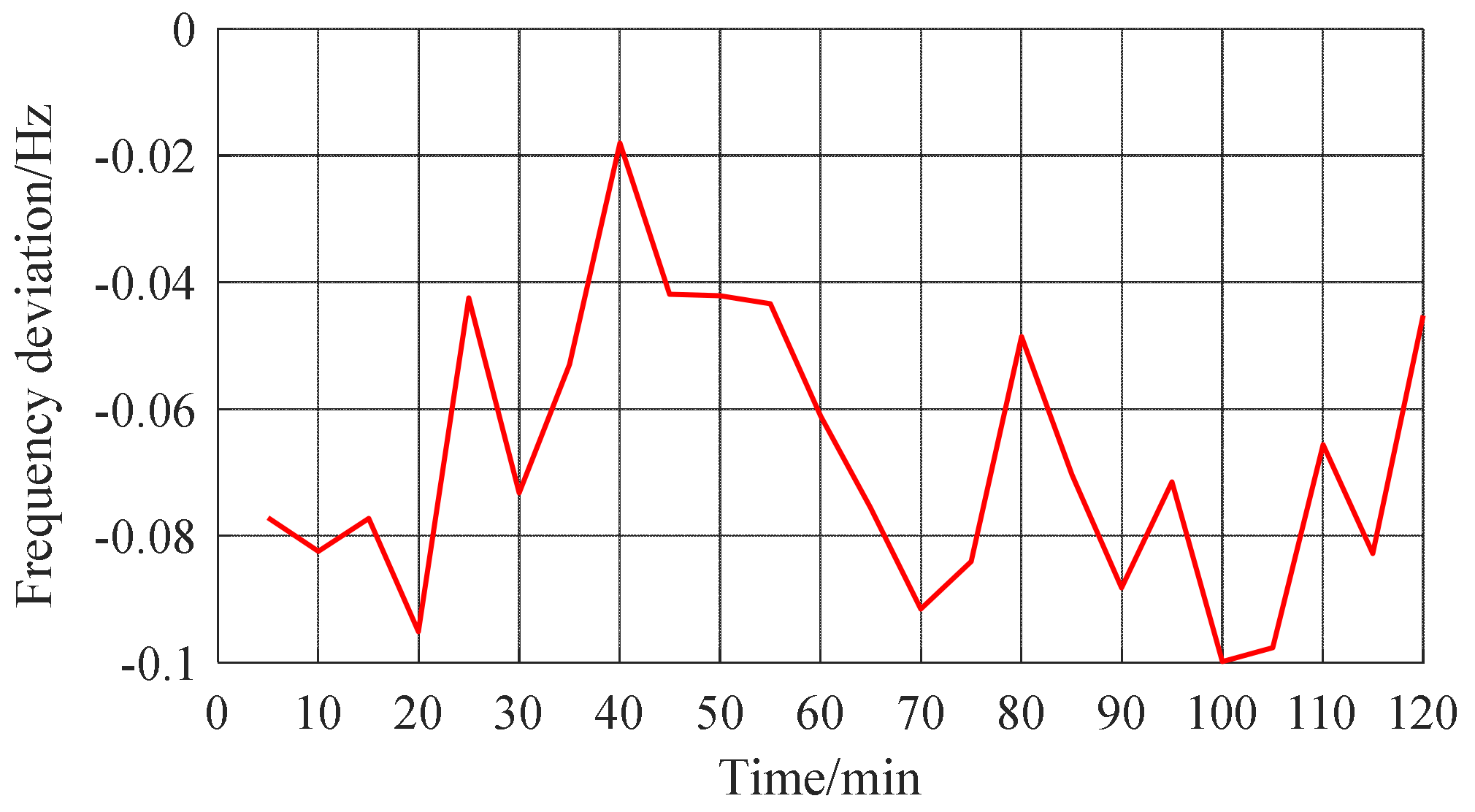
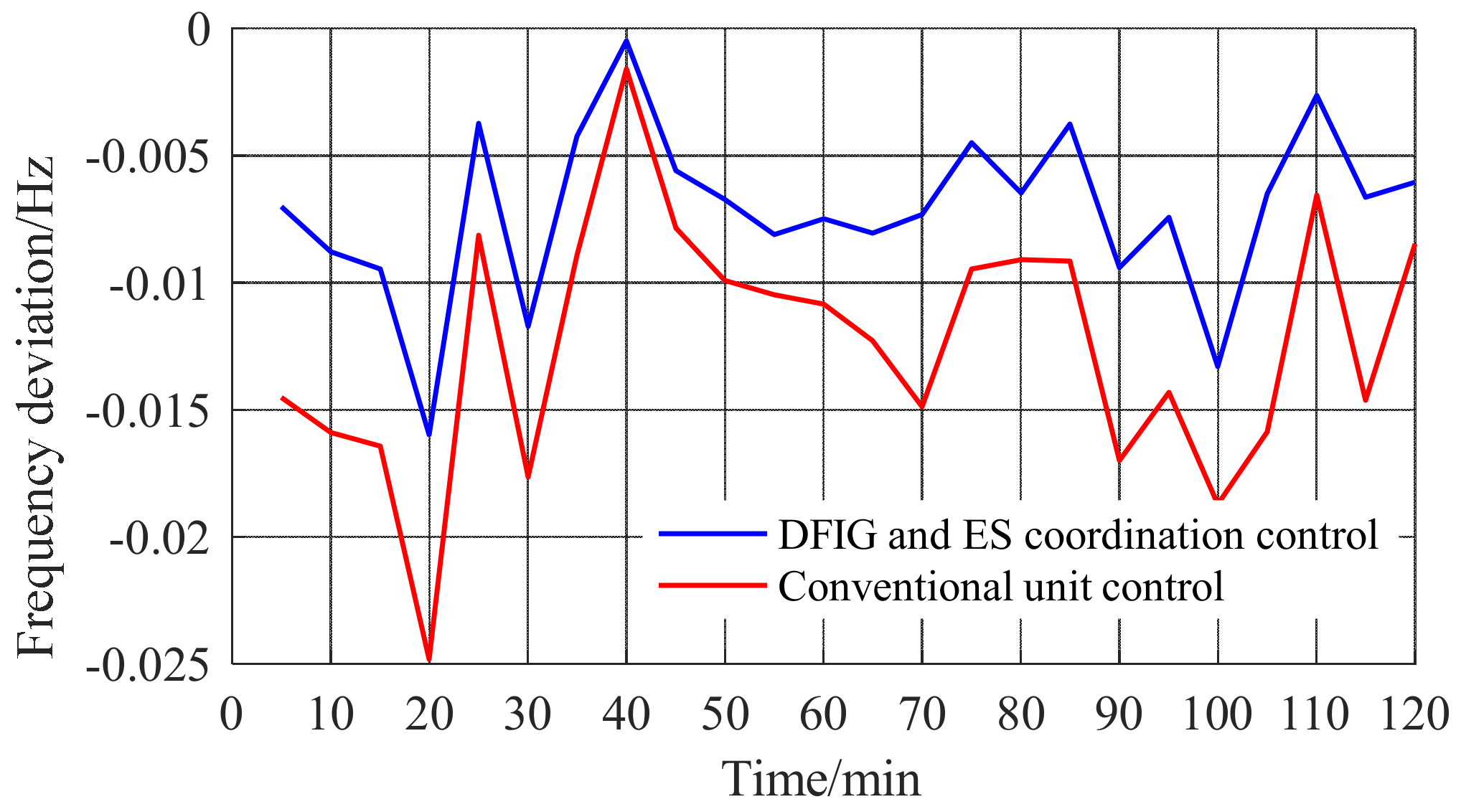
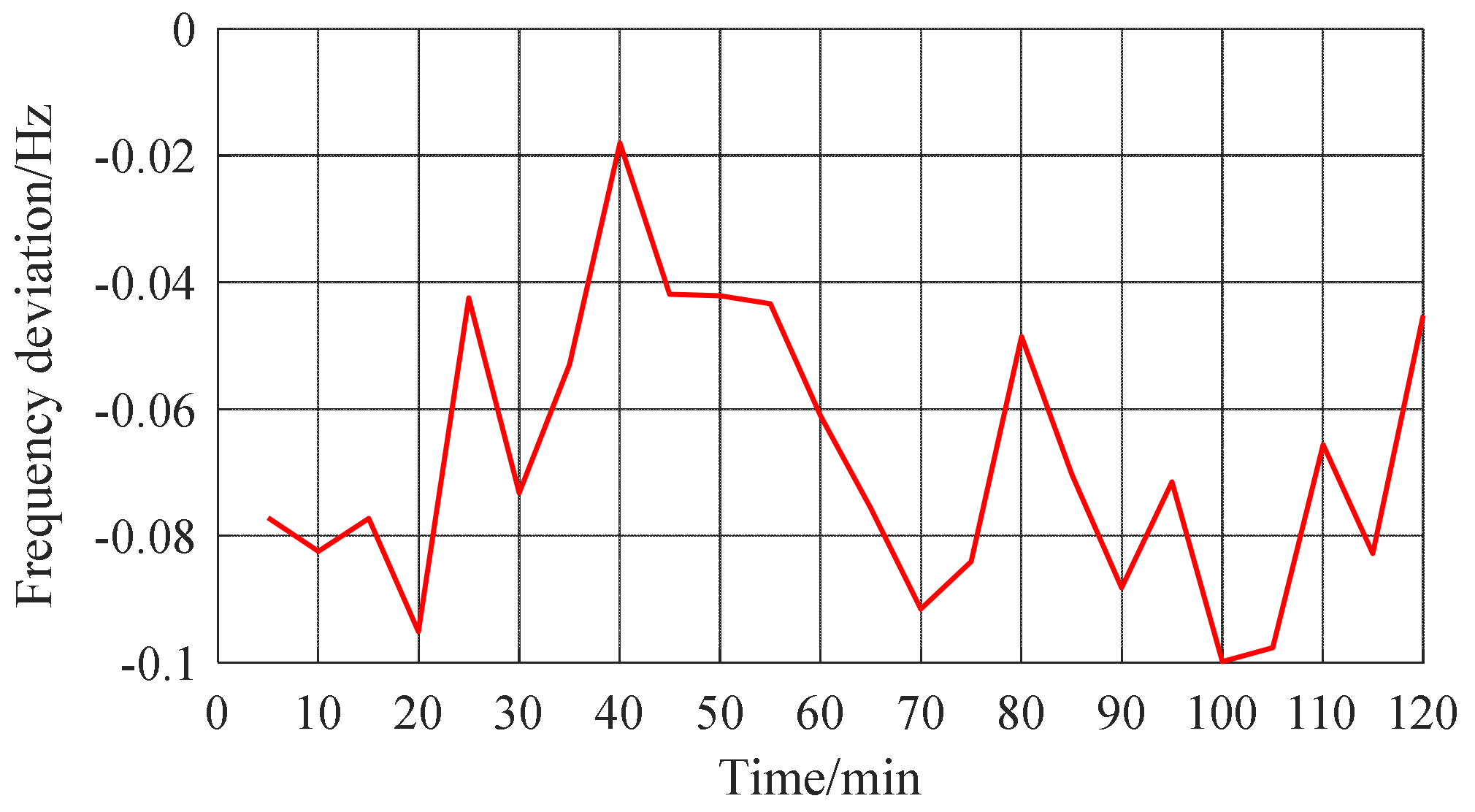
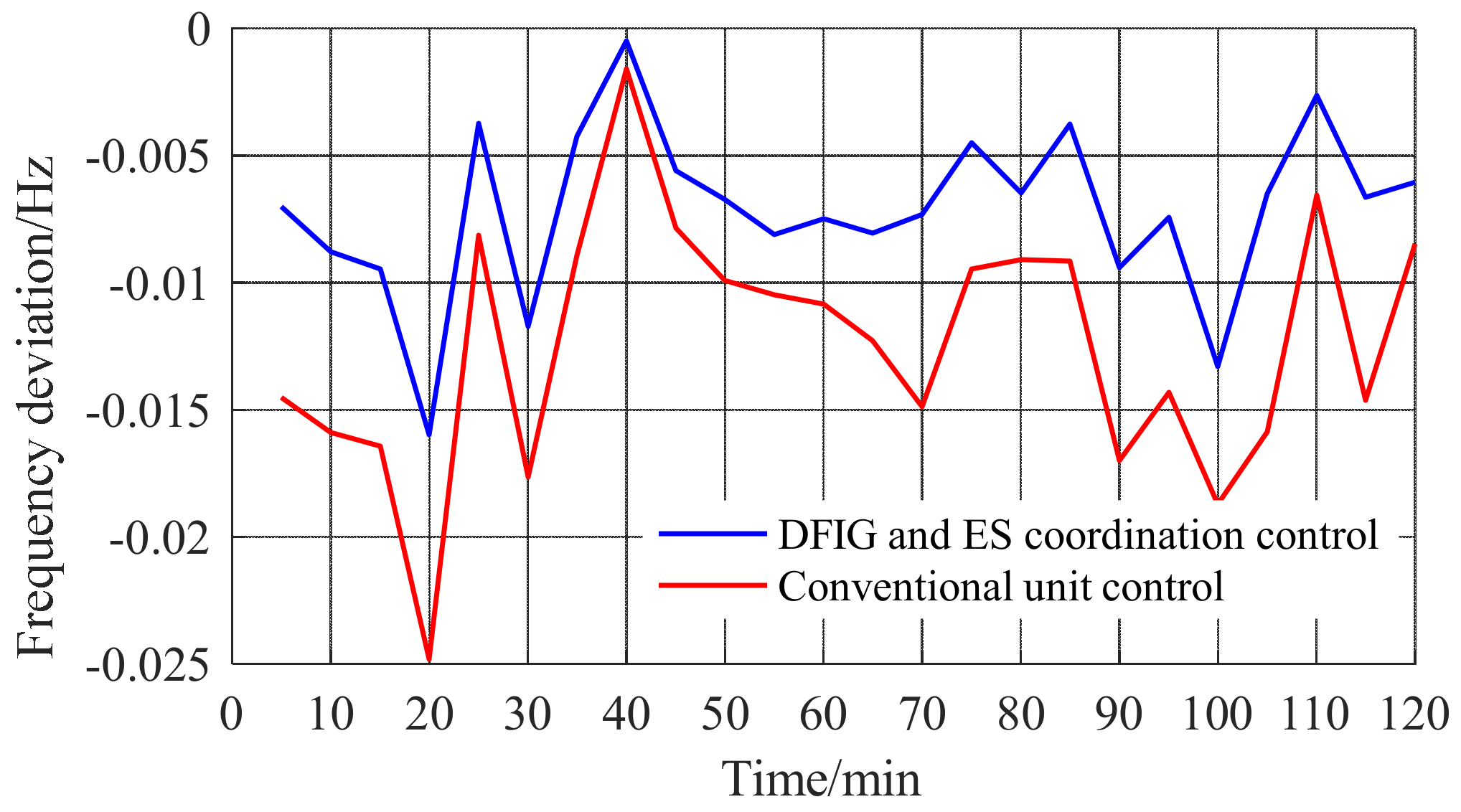
5.4. Continuous Load Disturbance
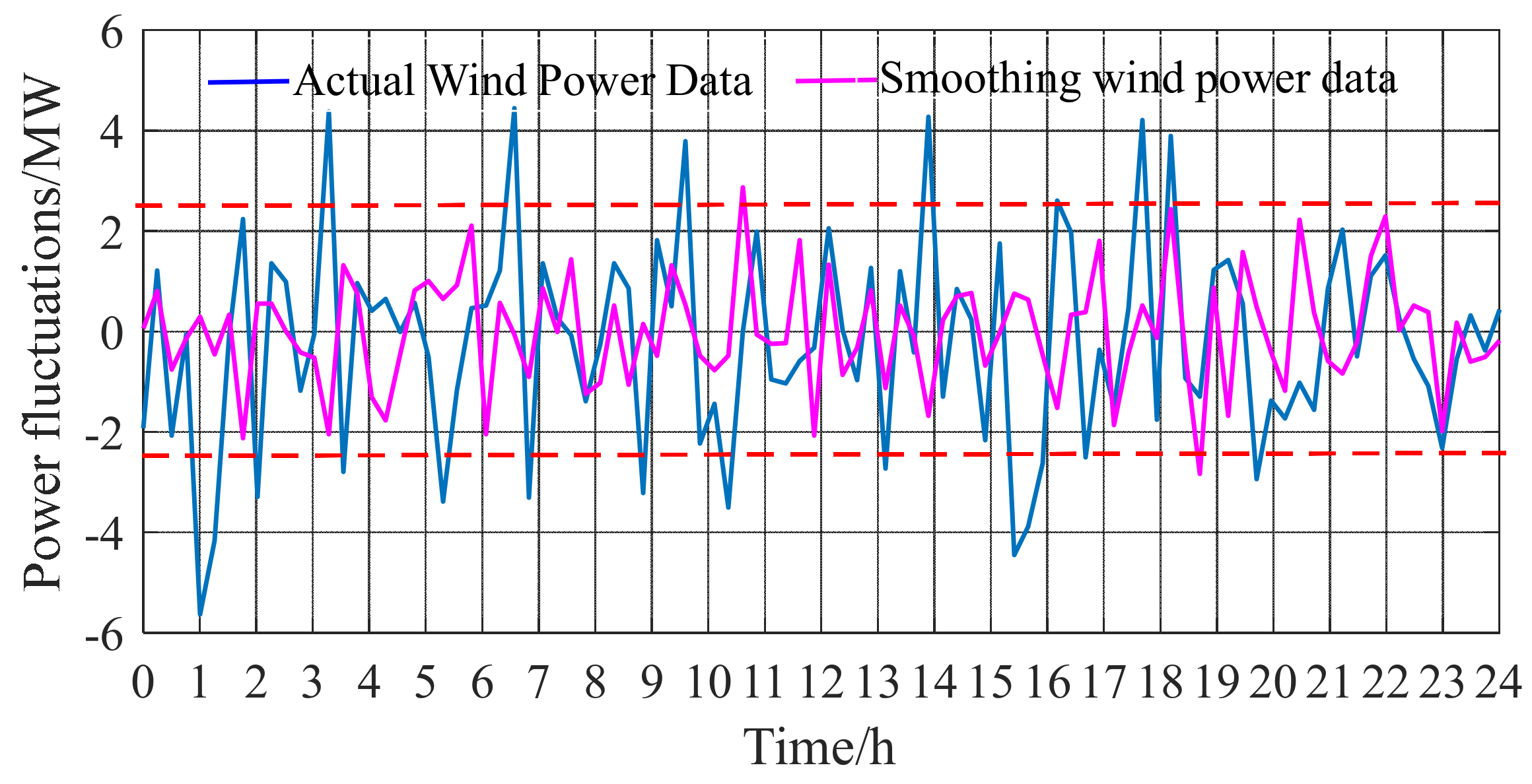
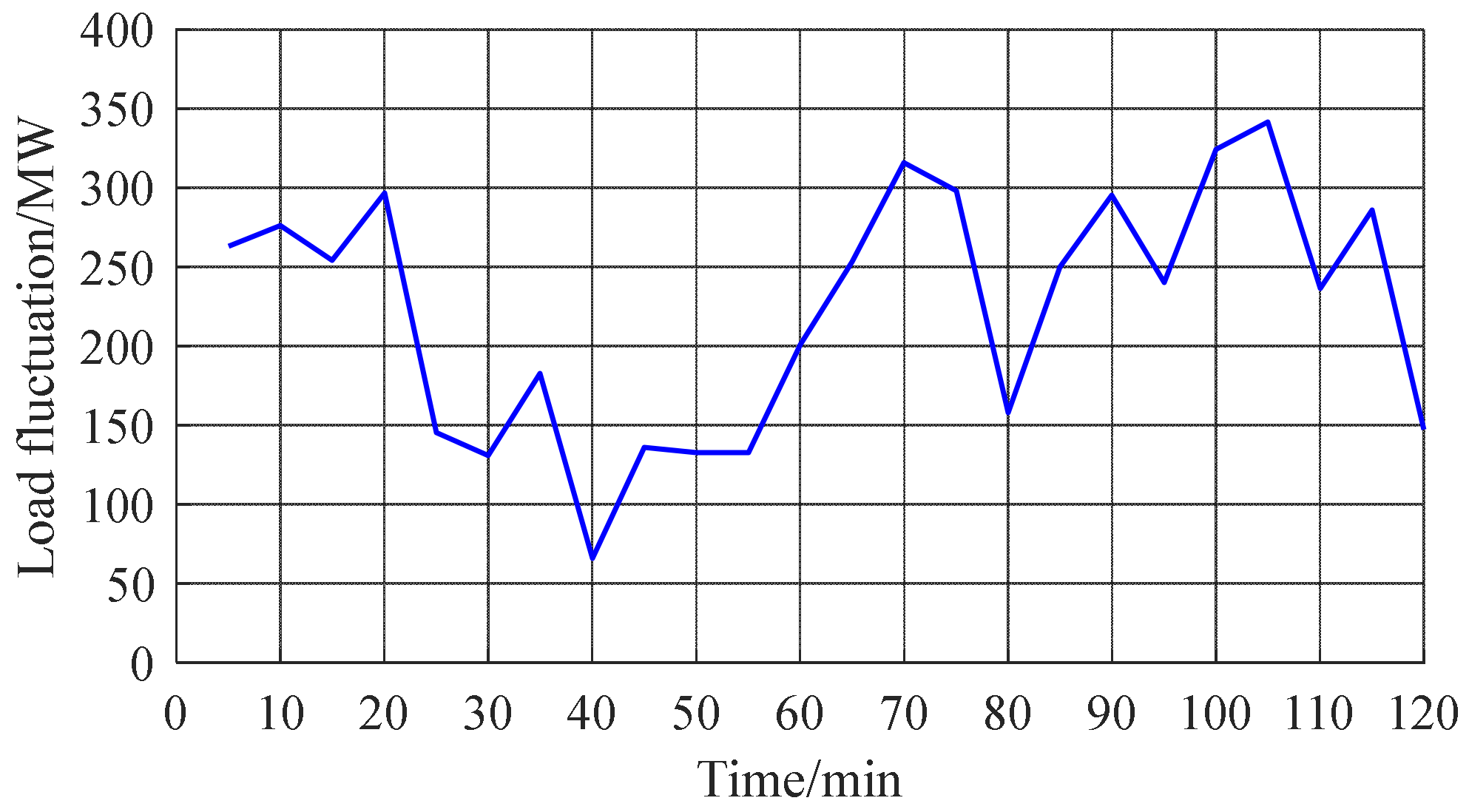
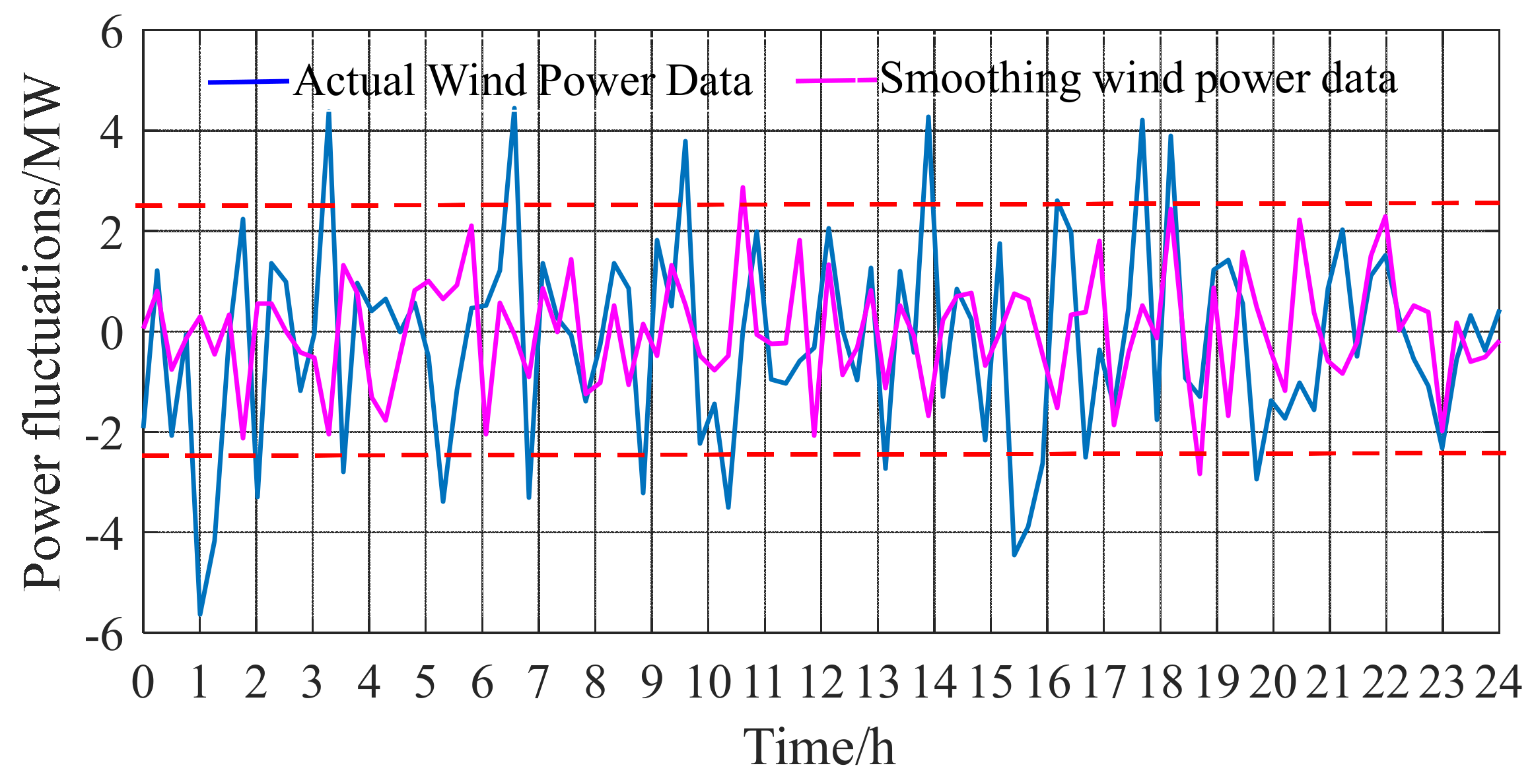
5.5. Smoothing Function of ES
- (1)
- Sum of fluctuation over-limit amplitude ΔPk: the sum of the difference between the power fluctuation exceeding the target value at any two adjacent sampling moments in the operating period of T, which is expressed asIn the equation: ΔPk is the over-limit power of the k-th climb.
- (2)
- Probability of fluctuation over-limit (r): the ratio of over-limit time to the total time in the operating period of T, which is written as
6. Conclusions
- (1)
- An ES Configuration method is proposed, in which the ES inertia of ES is equal to an equal capacity synchronous generator. By configuration about 5% of the wind farm rated power for ES, the system inertia response ability can remain unchanged after the DFIGs are connected to the system for replacing the conventional generators. Through the DFIG and ES coordinated control strategy, the ES assists the DFIG speed recovery to avoid the secondary frequency drop and improve the frequency modulation stability of the DFIG and ES system at different wind speeds.
- (2)
- The component-level design option of the structural model is presented. The supercapacitor installation mode with a total of 10 groups of 5 in series and 2 in parallel is selected. It can meet the economic and safety requirements of the DFIG and ES system structure. An ES multi-functional strategy is proposed, which can smooth the ramp events, thereby improving the wind power consumption and ES utilization. Besides, the frequency modulation stability and anti-interference of the single DFIG are improved. This system structure has enormous application potential for future smart grids and microgrids.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Transmission Line | R/(Ω/km) | X/(Ω/km) | B/(10−6 S/km) | Length/km | UN/kV |
|---|---|---|---|---|---|
| L1 | 0.040 | 0.321 | 3.54 | 21.9 | 330 |
| L2 | 0.013 | 0.139 | 4.43 | 279 | 750 |
| L3 | 0.040 | 0.321 | 3.04 | 150 | 330 |
| L4 | 0.046 | 0.331 | 3.50 | 10 | 330 |
| L5 | 0.013 | 0.139 | 4.43 | 560 | 750 |
| Generator Name | Xd | X′d | X″d | Xq | X′q | X″q | Xa |
| Northwest Generator | 1.651 | 0.232 | 0.171 | 1.59 | 0.332 | 0.171 | 0.003 |
| Jiuquan Generator | 1.861 | 0.2 | 0.17 | 1.814 | 0.333 | 0.167 | 0.002 |
| Generator Name | X1 | T′d0 | T″d0 | T′q0 | T″q0 | TJ | H |
| Northwest Generator | 0.102 | 5.9 | 0.033 | 0.956 | 0.078 | 10 | 6.5 |
| Jiuquan Generator | 0.073 | 0.47 | 0.035 | 0.9 | 0.06 | 8 | 6.5 |
| Generator Name | Rs | Ls | Rr | Lr | Lm | TJ |
|---|---|---|---|---|---|---|
| Equivalent DFIG | 0.069 | 0.084 | 0.126 | 0.126 | 3.78 | 5.4 |
| Generator Name | Rated Power (MW) | Maximum Output Power |
|---|---|---|
| Wind farm 1/ES1 | 2000/100 | 1530/100 |
| Wind farm 2/ES2 | 400/20 | 220/20 |
References
- Zhang, D.; Wu, Y.; Xiong, L.; Zhao, C. Analysis of inertia characteristics of direct-drive permanent-magnet synchronous generator in microgrid. Energies 2019, 12, 3141. [Google Scholar]
- Wu, Z.; Gao, W.; Gao, T.; Yan, W.; Zhang, H.; Yan, S.; Wang, X. State-of-the-art review on frequency response of wind power plants in power systems. J. Mod. Power Syst. Clean Energy 2018, 1, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.K.; Chang, S.M.; Hu, Y.L.; Hsu, W.H.; Lan, B.R. Frequency regulation technologies from a single wind turbine or wind farm. In Proceedings of the IEEE International Conference on Applied System Innovation, Chiba, Japan, 13–17 April 2018; pp. 1240–1243. [Google Scholar]
- Van de Vyver, J.; De Kooning, J.D.; Meersman, B.; Vandevelde, L.; Vandoorn, T.L. Droop control as an alternative inertial response strategy for the synthetic inertia on wind turbines. IEEE Trans. Power Syst. 2016, 2, 1129–1138. [Google Scholar] [CrossRef]
- Ochoa, D.; Martinez, S. Fast-Frequency Response Provided by DFIG-Wind Turbines and its Impact on the Grid. IEEE Trans. Power Syst. 2017, 32, 4002–4011. [Google Scholar] [CrossRef]
- Phulpin, Y. Communication-free inertia and frequency control for wind generators connected by an HVDC-link. IEEE Trans. Power Syst. 2012, 2, 1136–1137. [Google Scholar] [CrossRef]
- Zhang, Z.; Sun, Y.; Lin, J.; Li, G. Coordinated frequency regulation by doubly fed induction generator-based wind power plants. IET Renew. Power Gener. 2012, 1, 38–47. [Google Scholar] [CrossRef]
- He, J.; Wu, K.; Huang, L.; Xin, H.; Lu, C.; Wang, H. A coordinated control scheme to realize frequency support of PMSG-based wind turbines in weak grid. In Proceedings of the 2018 IEEE Power & Energy Society General Meeting (PESGM), Portland, OR, USA, 5–10 August 2018; pp. 1–5. [Google Scholar]
- Wu, B.; Abuduwayiti, X.; Chen, Y.; Tian, Y. RoCoF Droop Control of PMSG-Based Wind Turbines for System Inertia Response Rapidly. IEEE Access 2020, 8, 181154–181162. [Google Scholar]
- Wu, Y.K.; Yang, W.H.; Hu, Y.L.; Dzung, P.Q. Frequency Regulation at a Wind Farm Using Time-Varying Inertia and Droop Controls. IEEE Trans. Ind. Appl. 2019, 55, 213–224. [Google Scholar] [CrossRef]
- Miao, L.; Wen, J.; Xie, H.; Yue, C.; Lee, W.J. Coordinated Control Strategy of Wind Turbine Generator and Energy Storage Equipment for Frequency Support. IEEE Trans. Ind. Appl. 2015, 4, 2732–2742. [Google Scholar] [CrossRef]
- Bhatt, P.; Roy, R.; Ghoshal, S.P. Dynamic active power support by doubly fed induction generator for frequency control. In Proceedings of the 2010 IEEE 11th International Conference on Probabilistic Methods Applied to Power Systems, Singapore, 14–17 June 2010. [Google Scholar]
- Yao, L.; Yang, B.; Cui, H.; Zhuang, J.; Ye, J.; Xue, J. Challenges and progresses of energy storage technology and its application in power systems. J. Mod. Power Syst. Clean Energy 2016, 4, 519–528. [Google Scholar] [CrossRef] [Green Version]
- Zhang, F.; Xu, Z.; Meng, K. Optimal sizing of substation scale energy storage station considering seasonal variations in wind energy. IET Gener. Transm. Distrib. 2016, 13, 3241–3250. [Google Scholar] [CrossRef]
- Ngamroo, I.; Karaipoom, T. Improving low-voltage ride-through performance and alleviating power fluctuation of DFIG wind turbine in dc microgrid by optimal SMES with fault current limiting function. IEEE Trans. Appl. Supercond. 2014, 24, 2333031. [Google Scholar] [CrossRef]
- Liu, Y.; Du, W.; Xiao, L.; Wang, H.; Bu, S. Sizing Energy Storage Based on a Life-Cycle Saving Dispatch Strategy to Support Frequency Stability of an Isolated System with Wind Farms. IEEE Access 2019, 2, 166329–166336. [Google Scholar] [CrossRef]
- Delille, G.; Francois, B.; Malarange, G. Dynamic frequency control support by energy storage to reduce the impact of wind and solar generation on isolated power system’s inertia. IEEE Trans. Sustain. Energy 2012, 4, 931–939. [Google Scholar] [CrossRef]
- Ye, H.; Tang, Y.; Liu, Y.; Li, Z.; Qi, Z. Transient frequency response model-based energy storage optimum size in power systems. In Proceedings of the 2017 IEEE International Conference on Energy Internet (ICEI), Beijing, China, 17–21 April 2017; pp. 65–71. [Google Scholar]
- Knap, V.; Chaudhary, S.K.; Stroe, D.I.; Swierczynski, M.; Craciun, B.I.; Teodorescu, R. Sizing of an energy storage system for grid inertial response and primary frequency reserve. IEEE Trans. Power Syst. 2016, 5, 3447–3456. [Google Scholar] [CrossRef] [Green Version]
- Yue, M.; Wang, X. Grid inertial response-based probabilistic determination of energy storage system capacity under high solar penetration. IEEE Trans. Sustain. Energy 2015, 3, 1039–1049. [Google Scholar] [CrossRef]
- Masuta, T.; Yokoyama, A. Supplementary load frequency control by use of a number of both electric vehicles and heat pump water heaters. IEEE Trans. Smart Grid 2012, 3, 1253–1262. [Google Scholar] [CrossRef]
- Ullah, R.N.; Thiringer, T.; Karlsson, D. Temporary primary frequency control support by variable speed wind turbines potential and applications. IEEE Trans Power Syst. 2008, 2, 601–612. [Google Scholar] [CrossRef]
- Kang, M.; Kim, K.; Muljadi, E.; Park, J.W.; Kang, Y.C. Frequency control support of a doubly-fed induction generator based on the torque limit. IEEE Trans. Power Syst. 2016, 6, 4574–4583. [Google Scholar] [CrossRef]
- Chang-Chien, L.R.; Yin, Y.C. Strategies for operating wind power in a similar manner of conventional power plant. IEEE Trans. Power Syst. 2009, 4, 926–933. [Google Scholar] [CrossRef]
- Han, X.; Chen, Y.; Wu, Z. Research on frequency regulation of power system containing wind farm. In Proceedings of the IEEE International Conference on Probabilistic Methods Applied to Power Systems (PMAPS), Taiyuan, China, 14–17 June 2010; pp. 14–17. [Google Scholar]
- Wu, Z.; Gao, W.; Wang, J.; Gu, S. A coordinated primary frequency regulation from permanent magnet synchronous wind turbine generation. In Proceedings of the 2012 IEEE in Power Electronics and Machines in Wind Applications (PEMWA), Denver, CO, USA, 16–18 July 2012; pp. 1–6. [Google Scholar]
- Yang, D.; Kim, J.; Kang, Y.C.; Muljadi, E.; Zhang, N.; Hong, J.; Song, S.H.; Zheng, T. Temporary Frequency Support of a DFIG for High Wind Power Penetration. IEEE Trans. Power Syst. 2018, 3, 3428–3437. [Google Scholar] [CrossRef]
- Kundur, P. Power System Stability and Control; McGraw-Hill Professional: New York, NY, USA, 1994; pp. 128–136. [Google Scholar]
- Australian Energy Market Operator. Black System South Australia 28 September 2016: Final Report. 28 March 2017. Available online: https://apo.org.au/node/74886 (accessed on 10 August 2021).
- Erinmez, I.A.; Bickers, D.O.; Wood, G.F.; Hung, W.W. NGC experience with frequency control in England and Wales-provision of frequency response by generators. In Proceedings of the IEEE Power Engineering Society 1999 Winter Meeting, New York, NY, USA, 31 January–4 February 1999; pp. 590–596. [Google Scholar]
- De Leon, C.P.; Frías-Ferrer, A.; González-García, J.; Szánto, D.A.; Walsh, F.C. Redox flow cells f or energy conversion. J. Power Sources 2006, 1, 716–732. [Google Scholar] [CrossRef] [Green Version]
- Datta, U.; Kalam, A.; Shi, J. Battery Energy Storage System Control for Mitigating PV Penetration Impact on Primary Frequency Control and State-of-Charge Recovery. IEEE Trans. Sustain. Energy 2020, 2, 746–757. [Google Scholar] [CrossRef] [Green Version]
- Banakar, H.; Luo, C.; Ooi, B.T. Impacts of wind power minute-to-minute variations on power system operation. IEEE Trans. Power Syst. 2008, 1, 150–160. [Google Scholar] [CrossRef]
- Ferreira, C.; Gama, J.; Matias, L.; Botterud, A.; Wang, J. A Survey on Wind Power Ramp Forecasting; Argonne National Laboratory (ANL): Argonne, IL, USA, 2011. [Google Scholar]
- Jiang, Q.; Wang, H. Two-time-scale coordination control for a battery energy storage system to mitigate wind power fluctuations. IEEE Trans Energy Convers. 2013, 1, 52–61. [Google Scholar] [CrossRef]




| ES Type | η | DOD × N | C (RMB/kWh) | Maintenance Cost (RMB/kWh) | r |
|---|---|---|---|---|---|
| Lead-acid batteries | 70~75 | 1 × 800 | 1 | 0.05 | −54 |
| Lithium-Ion battery | 90~95 | 1 × 1000 | 4.5 | 0.05 | −86 |
| Full flow battery | 70~80 | 1 × 13,000 | 5~10 | 0.1 | −30~26 |
| Super capacitor | 80~95 | 1 × 200,000 | 27 | 0.05 | 247 |
| Group Numbers in Series | Group Numbers in Parallel | Umin/V | Umax/V | Discharge Efficiency (%) |
|---|---|---|---|---|
| 6 | 2 | 30 | 864 | 97.7 |
| 5 | 2 | 32 | 720 | 96.9 |
| 4 | 2 | 36 | 576 | 95.7 |
| Control Strategy | Non-Frequency Modulation DFIG and ES | Frequency Modulation DFIG and ES | Conventional Generator |
|---|---|---|---|
| Maximum deviation/Hz | −0.0998 | −0.0133 | −0.0187 |
| Mean deviation/Hz | −0.0678 | −0.0066 | −0.0119 |
| Improvement (%) | / | 86.67 | 81.25 |
| Operation Mode | ΔPS | R (%) |
|---|---|---|
| ES smoothing | 0.16 | 3.77 |
| Original wind power | 0.59 | 25.16 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.; Li, X. Configuration Method and Multi-Functional Strategy for Embedding Energy Storage into Wind Turbine. Energies 2021, 14, 5354. https://doi.org/10.3390/en14175354
Chen C, Li X. Configuration Method and Multi-Functional Strategy for Embedding Energy Storage into Wind Turbine. Energies. 2021; 14(17):5354. https://doi.org/10.3390/en14175354
Chicago/Turabian StyleChen, Changqing, and Xinran Li. 2021. "Configuration Method and Multi-Functional Strategy for Embedding Energy Storage into Wind Turbine" Energies 14, no. 17: 5354. https://doi.org/10.3390/en14175354
APA StyleChen, C., & Li, X. (2021). Configuration Method and Multi-Functional Strategy for Embedding Energy Storage into Wind Turbine. Energies, 14(17), 5354. https://doi.org/10.3390/en14175354