
Phasor Estimation of Transient Electrical Signals Composed of Harmonics and Interharmonics


Abstract
:1. Introduction
- The parameters that the digital filter has to provide to the protection and/or fault location functions must be completely reliable and precise.
- The execution time of the calculations must be kept to a minimum so that the relay responses are as fast as possible.
- It must be independent of the fault moment so that there are not other unknowns in the equations for its calculation, and it must have the ability to operate correctly before, during, and after the fault.
2. Proposed Method
2.1. Biunivocal Frequency Relationship of Phasors, or BFRP
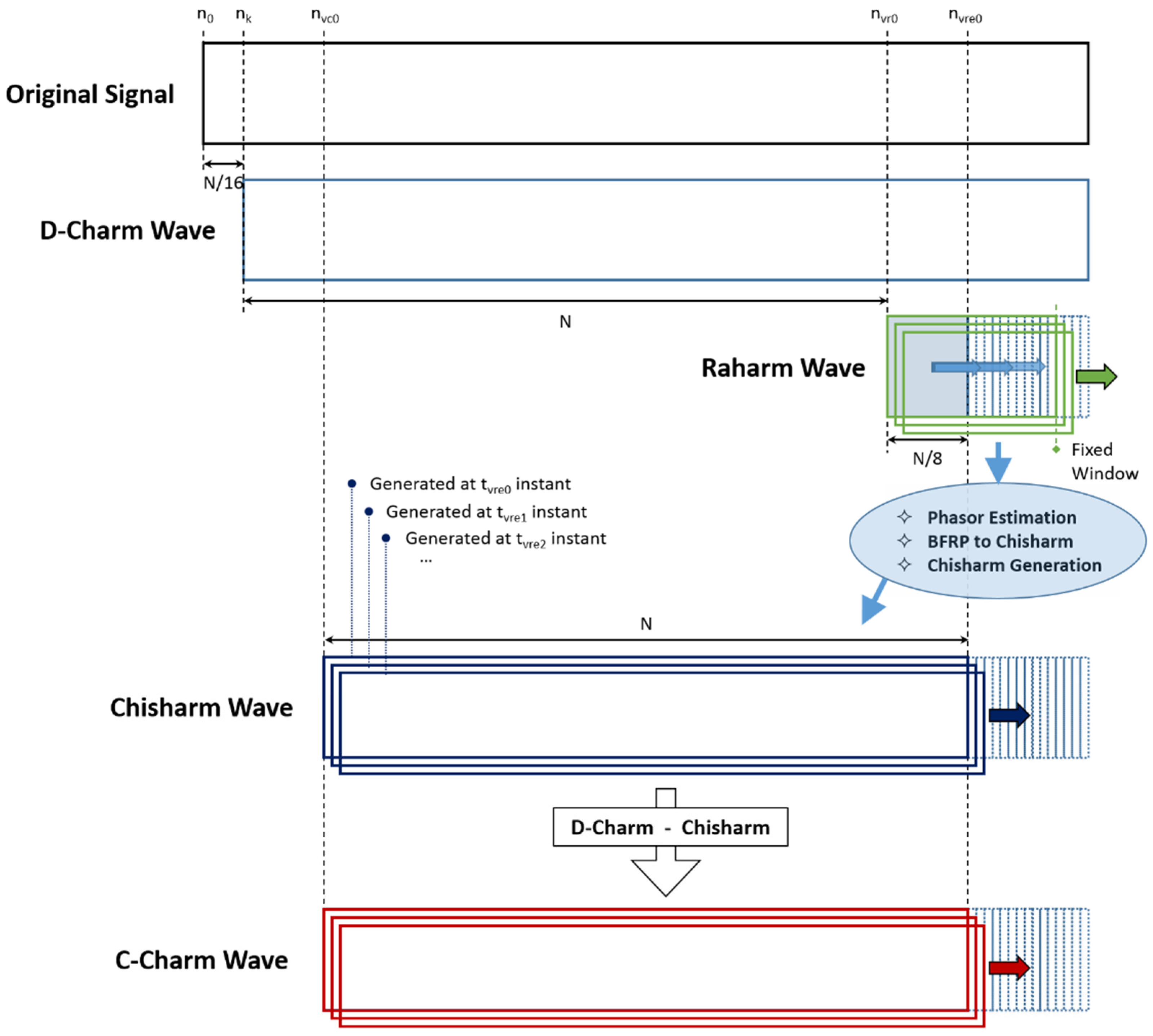
2.2. Obtaining the C-Charm Wave
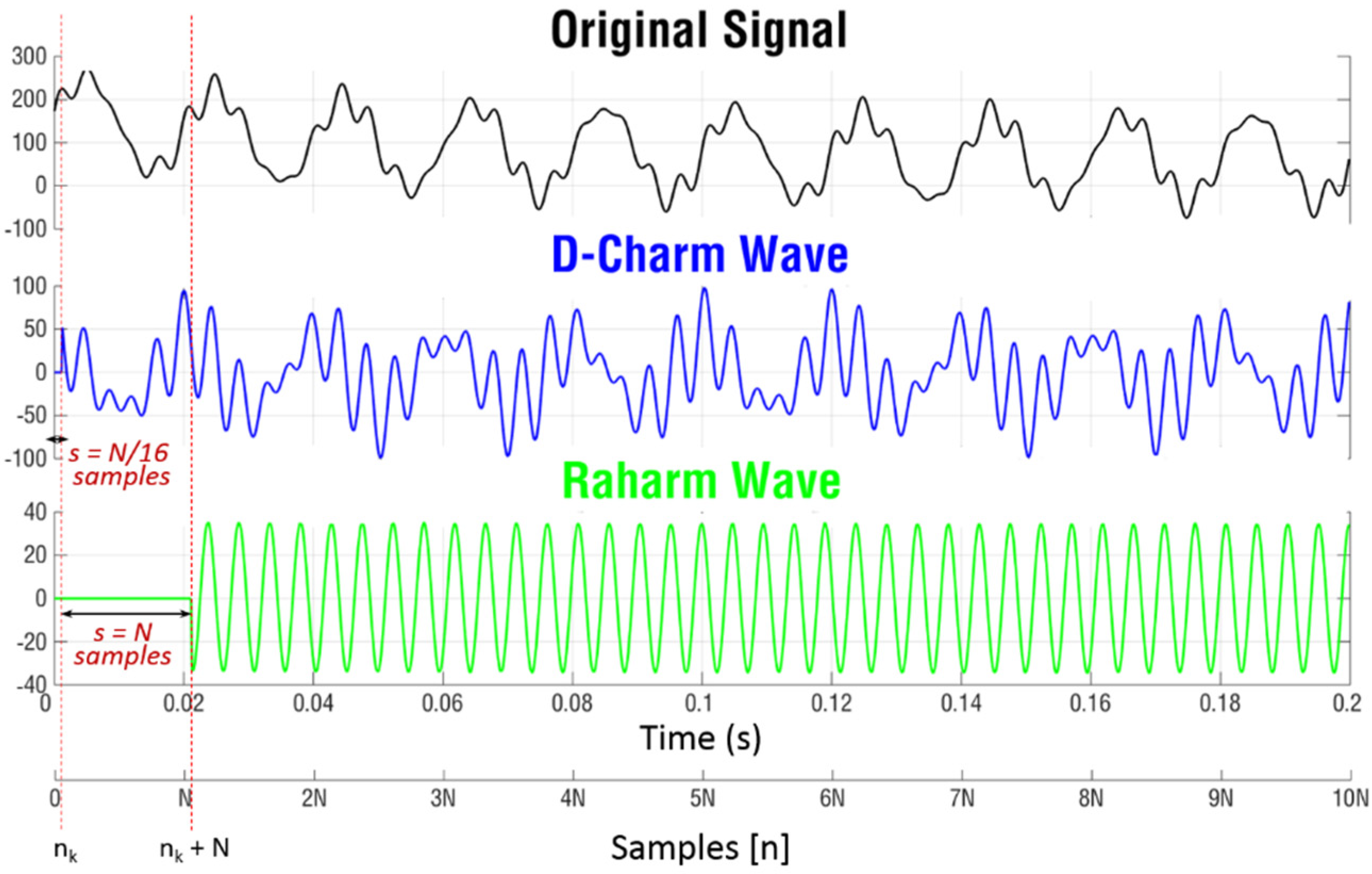
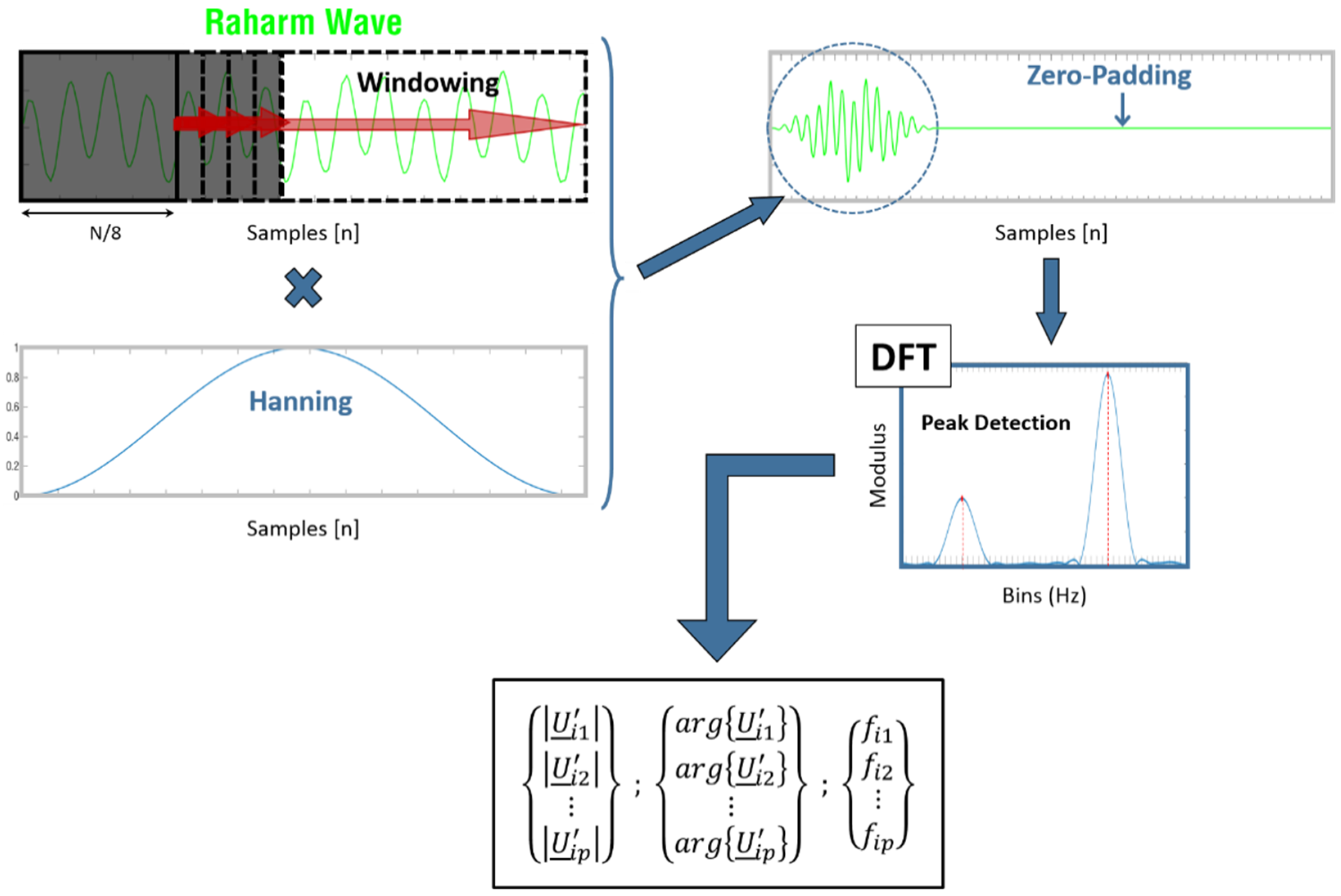
- When the Raharm signal reaches data samples, equivalent to the period of a 400 Hz component, the signal is windowed.
- The HZP (Hanning and Zero-Padding) technique is applied to the windowing: the windowed signal is multiplied by a Hanning function in order to smooth the spectral response, and enough zeros are added (zero-padding) to the end of the sequence to increase the spectral resolution [37]. This assures the estimation of the non-harmonic frequency components.
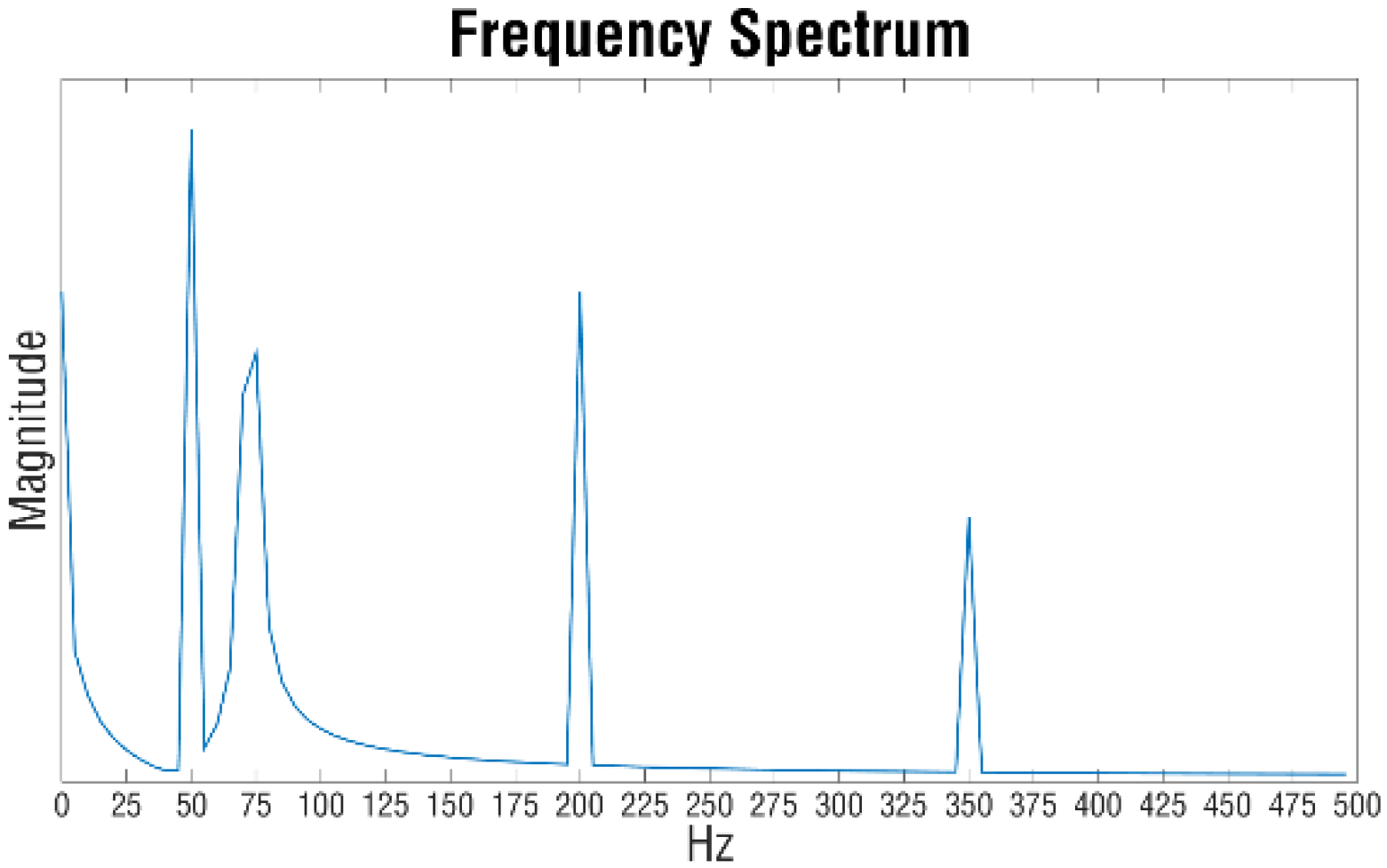
- The DFT is calculated for the previous signal, and the peaks or maximum values are located from the magnitude spectrum. By peak detection, not only can information be extracted from the magnitudes of the components, but the frequency associated with each maximum can also be obtained. Once the frequency is known, the phase of each component can be obtained through the phase spectrum. All the above-mentioned information is easily applicable with a simple programming code and can be verified in the Matlab environment [38].
- For each new sample of the Raham signal, steps 2 and 3 are repeated but with an adaptive data window. The window gains one more Raharm signal sample each time, but one less zero is added. In this way, the increased spectral resolution is maintained.
- The size of the window is set when a certain criterion of values is reached in terms of the magnitude, phase, and frequency of the estimated components. At this point, a suitable window for the correct estimation is considered, and from there, the window advances.
- If the estimated values vary once they have remained constant, this fact will be an indicator that shows that the original signal has changed, and therefore the whole process should be applied from step 1. In this case, it is necessary to re-estimate the new components from the beginning.
2.3. Phasor Calculation of the Original Signal
3. Results
- Type A: this type of signal was defined to test the response of the filter to extreme conditions of the analyzed signal. Such conditions can reach more demanding levels than those normally existing in an electrical system.
- Type B: this type of signal was defined to test the response of the filter to situations that originated from faults in an electrical system in transition conditions from pre-fault to post-fault.
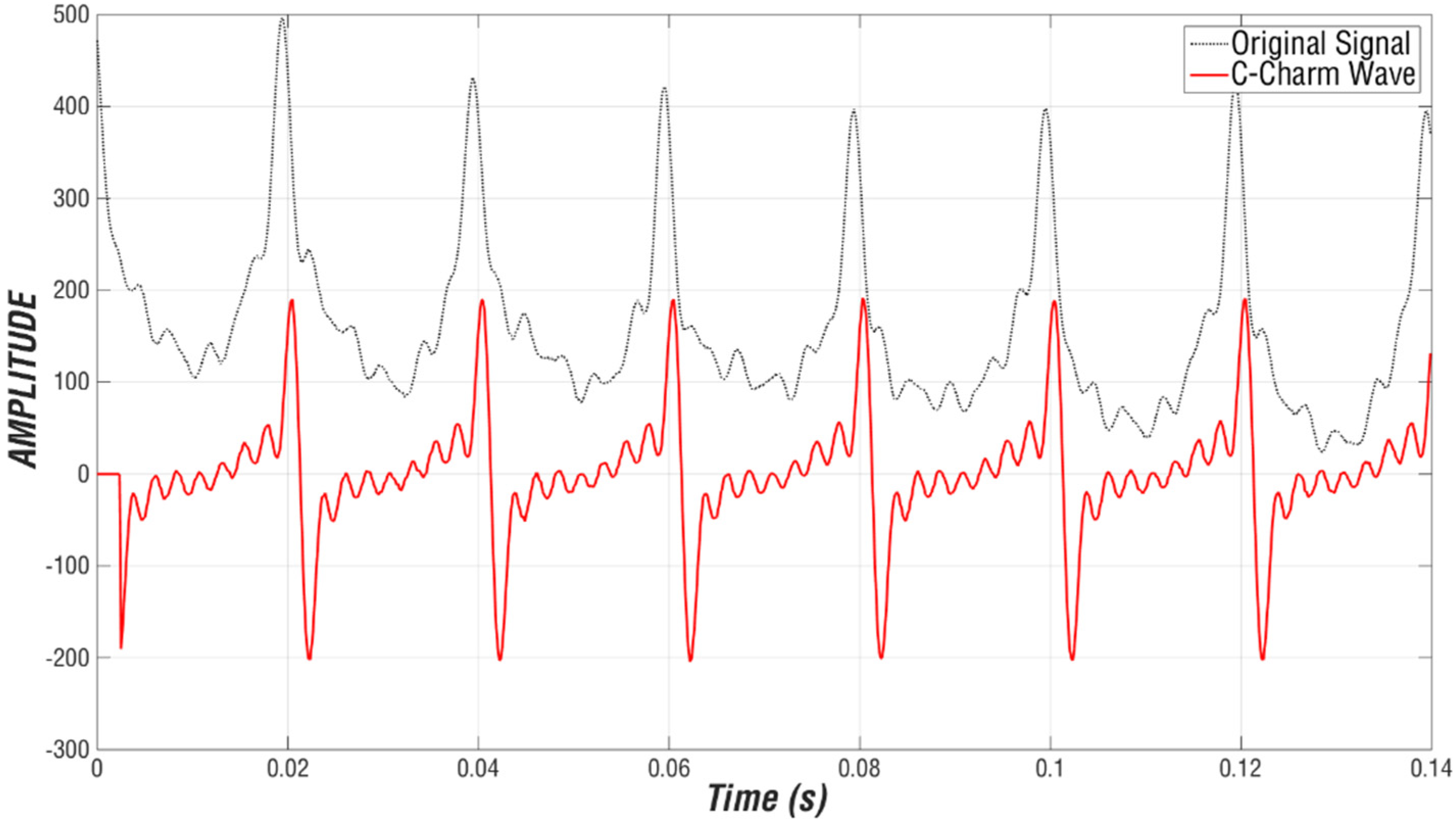
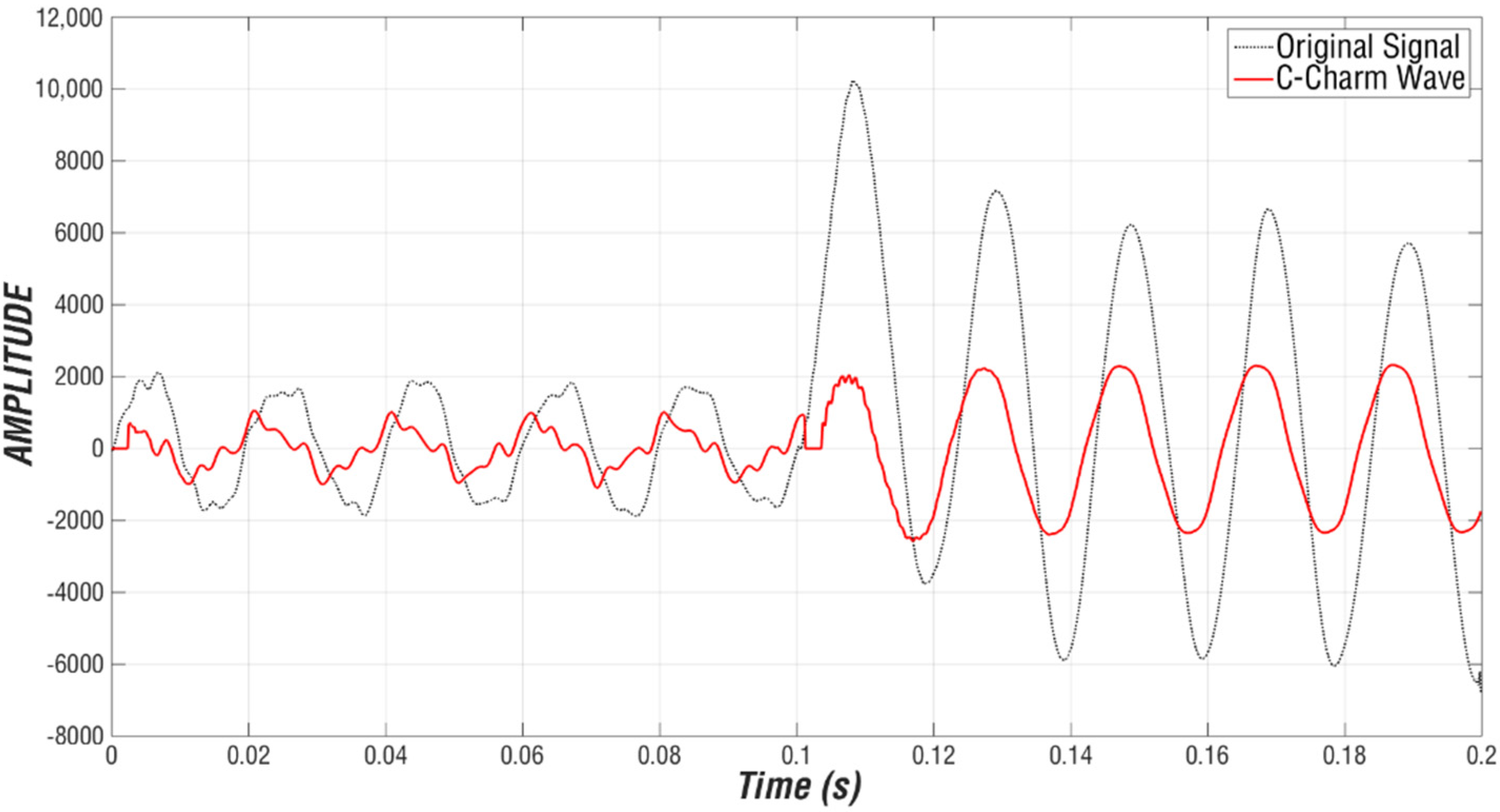
- The original signal and its corresponding C-Charm signal.
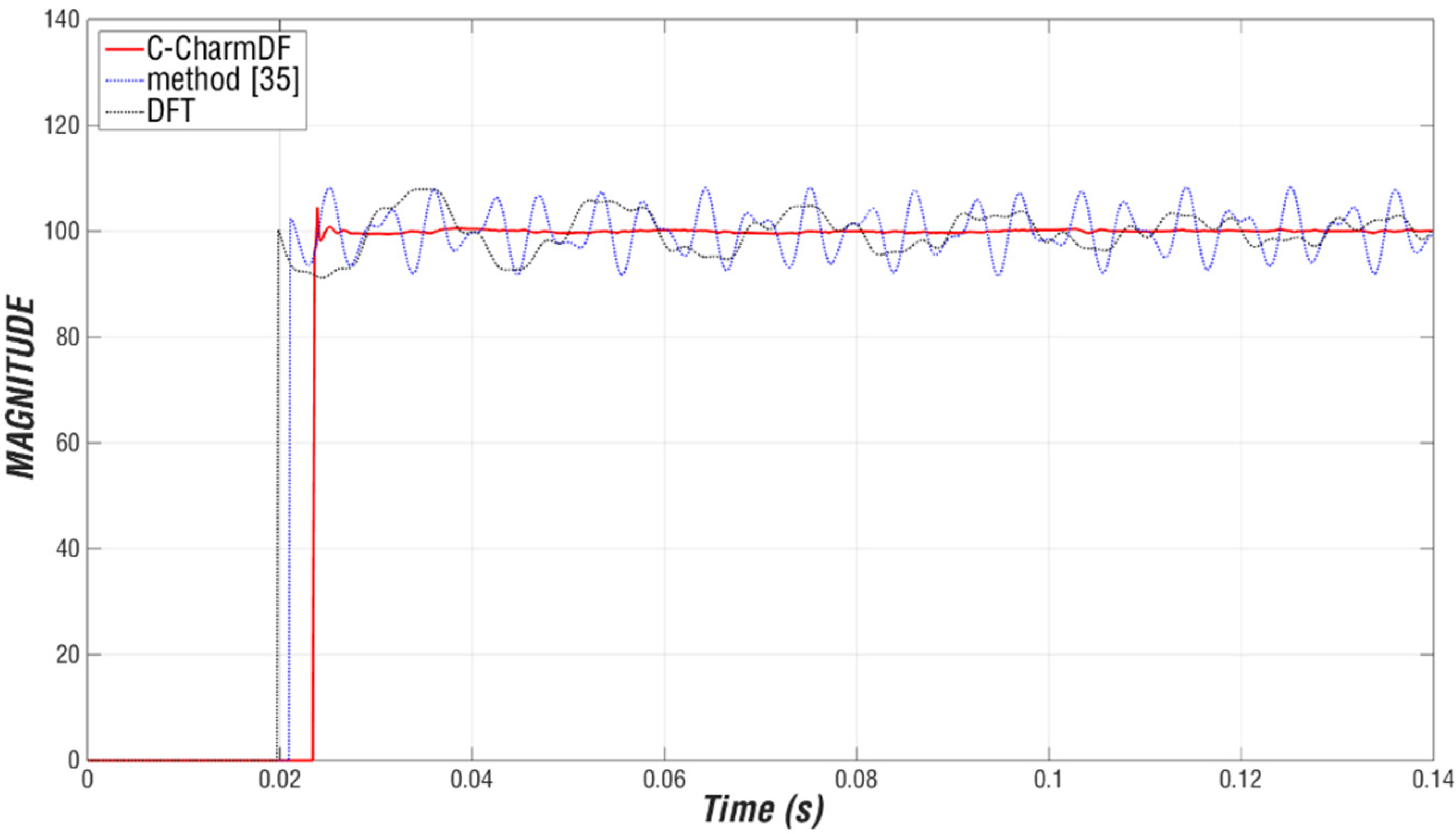
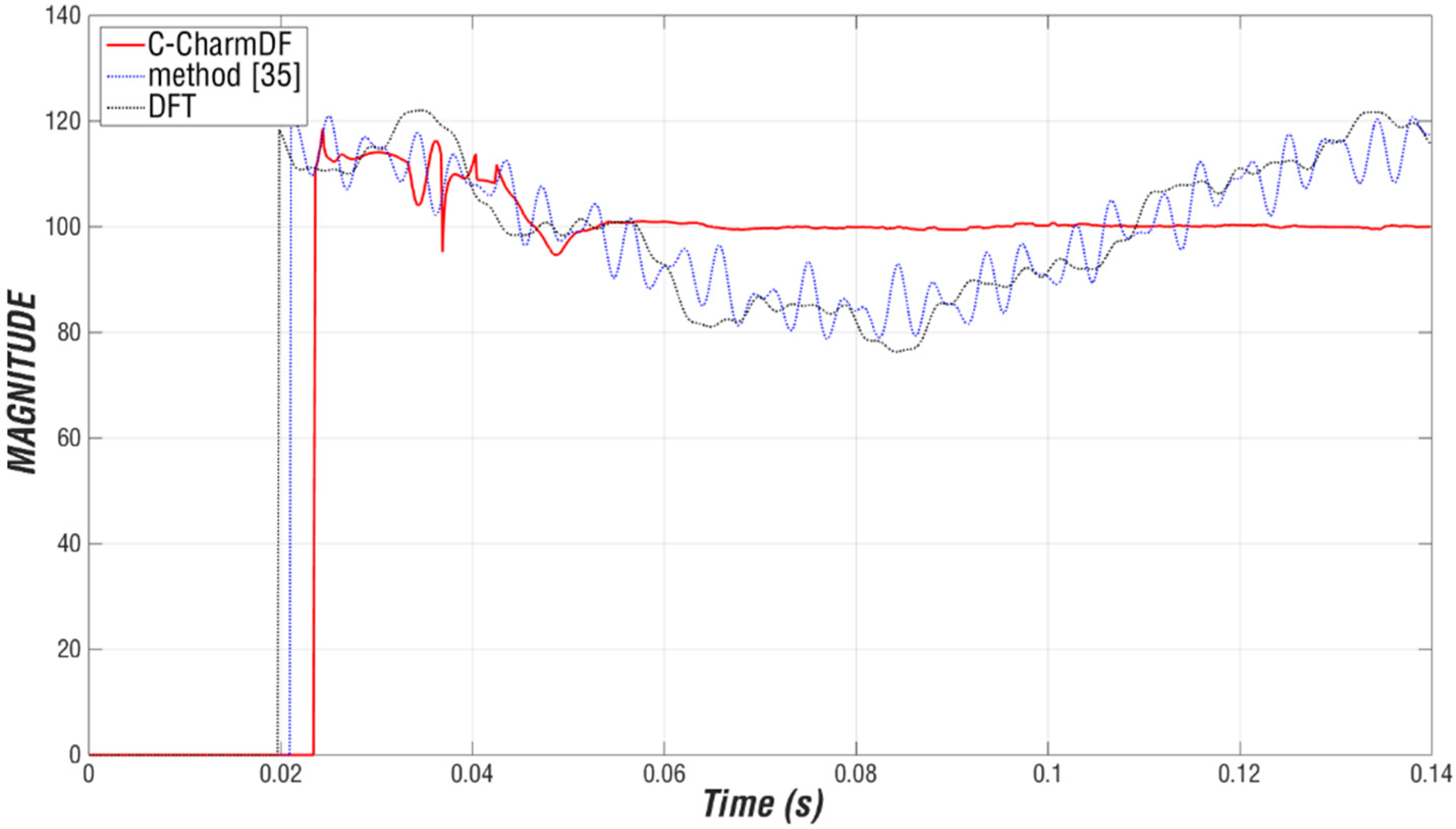
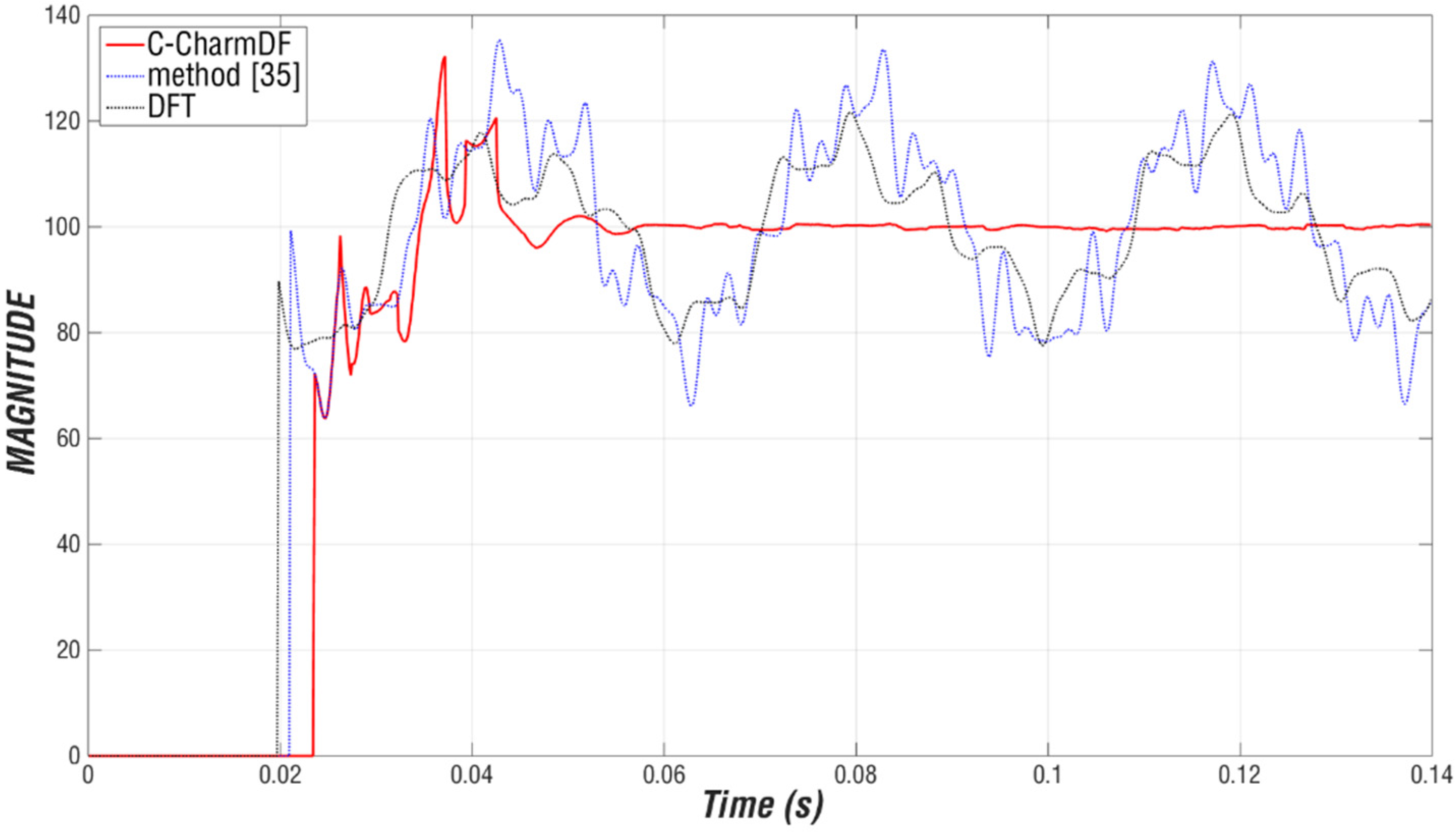
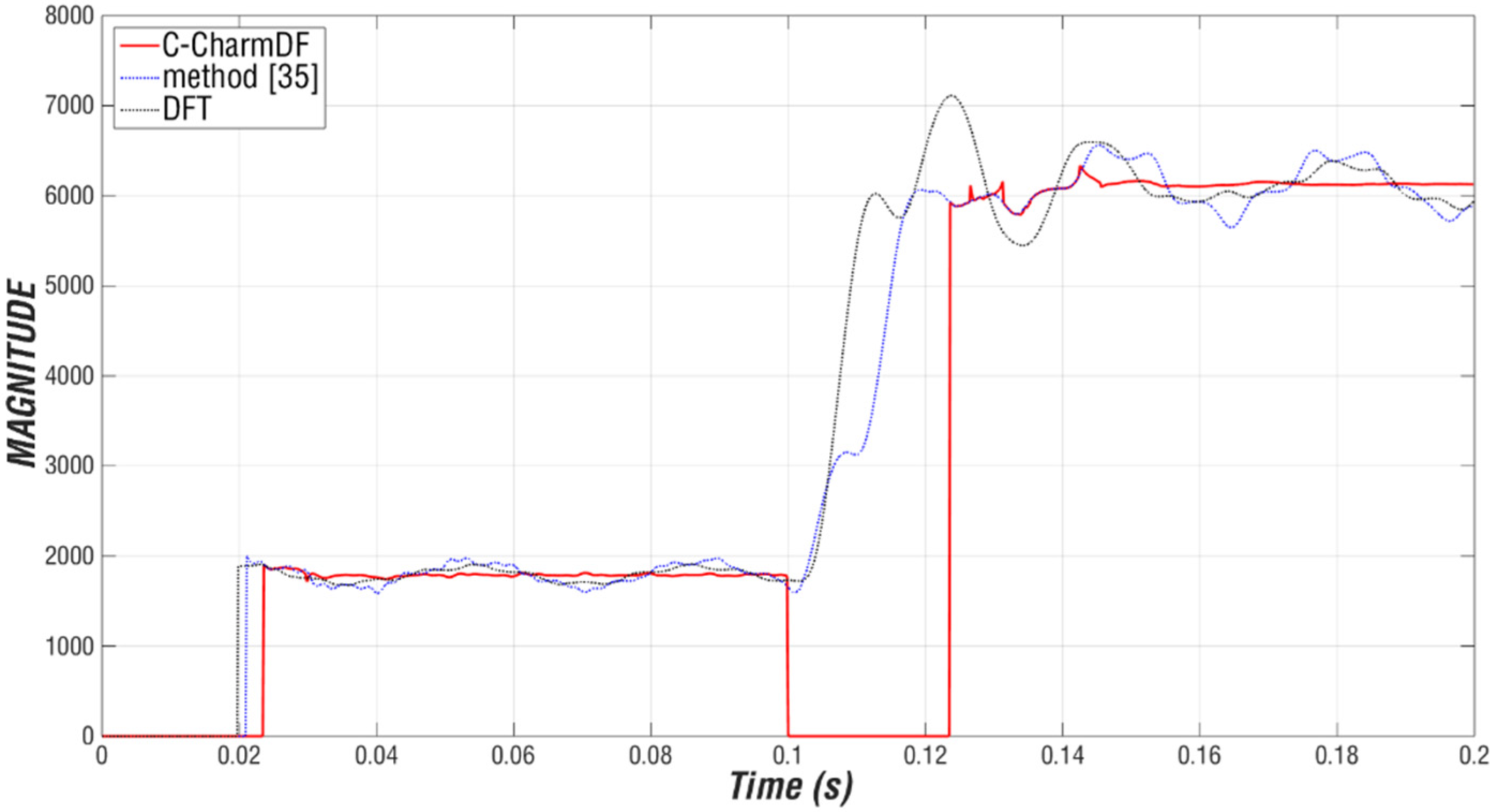
- The estimation of the fundamental phasor modulus, with a comparison of the result applying the DFT and the method proposed in [35].
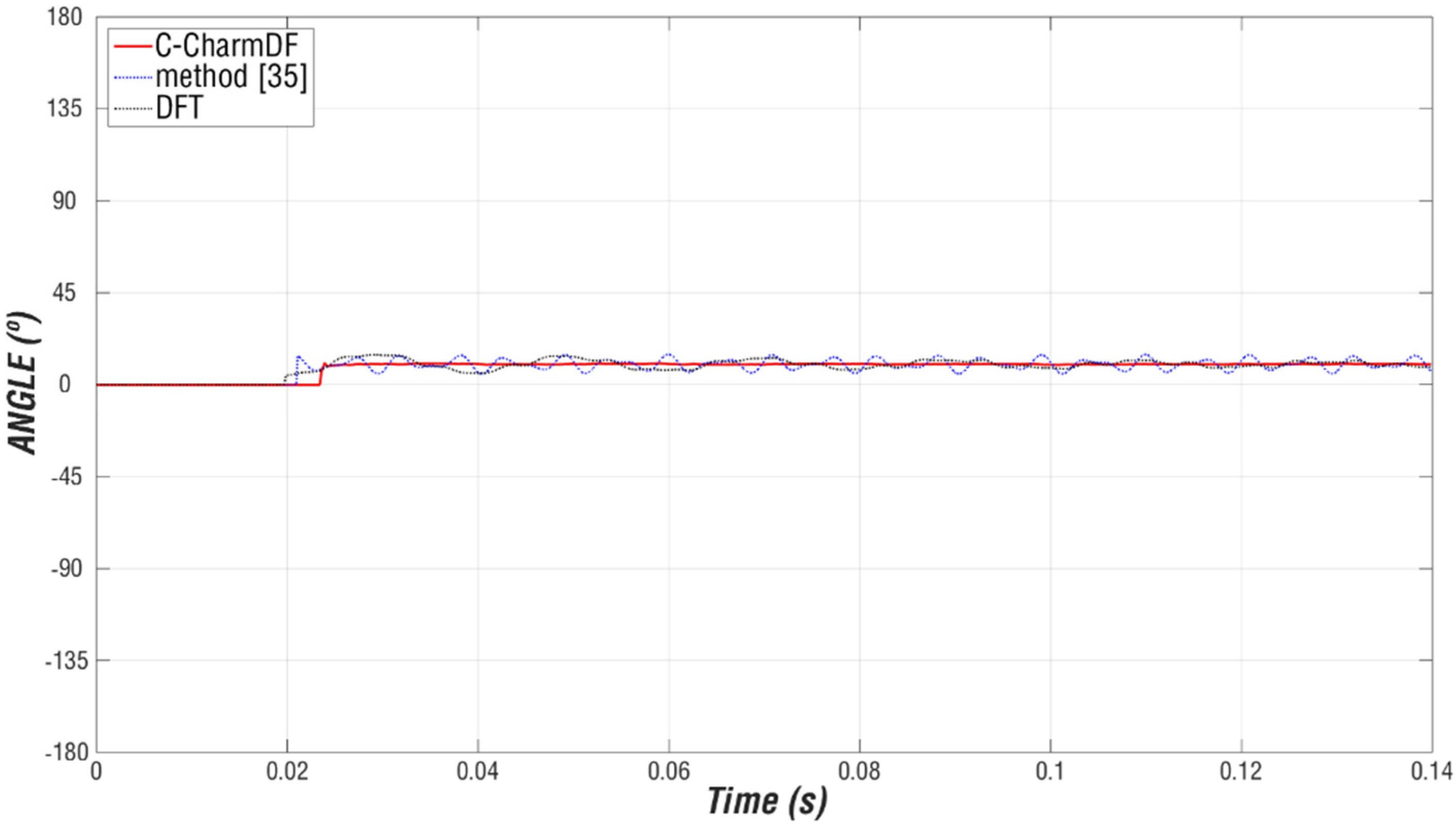
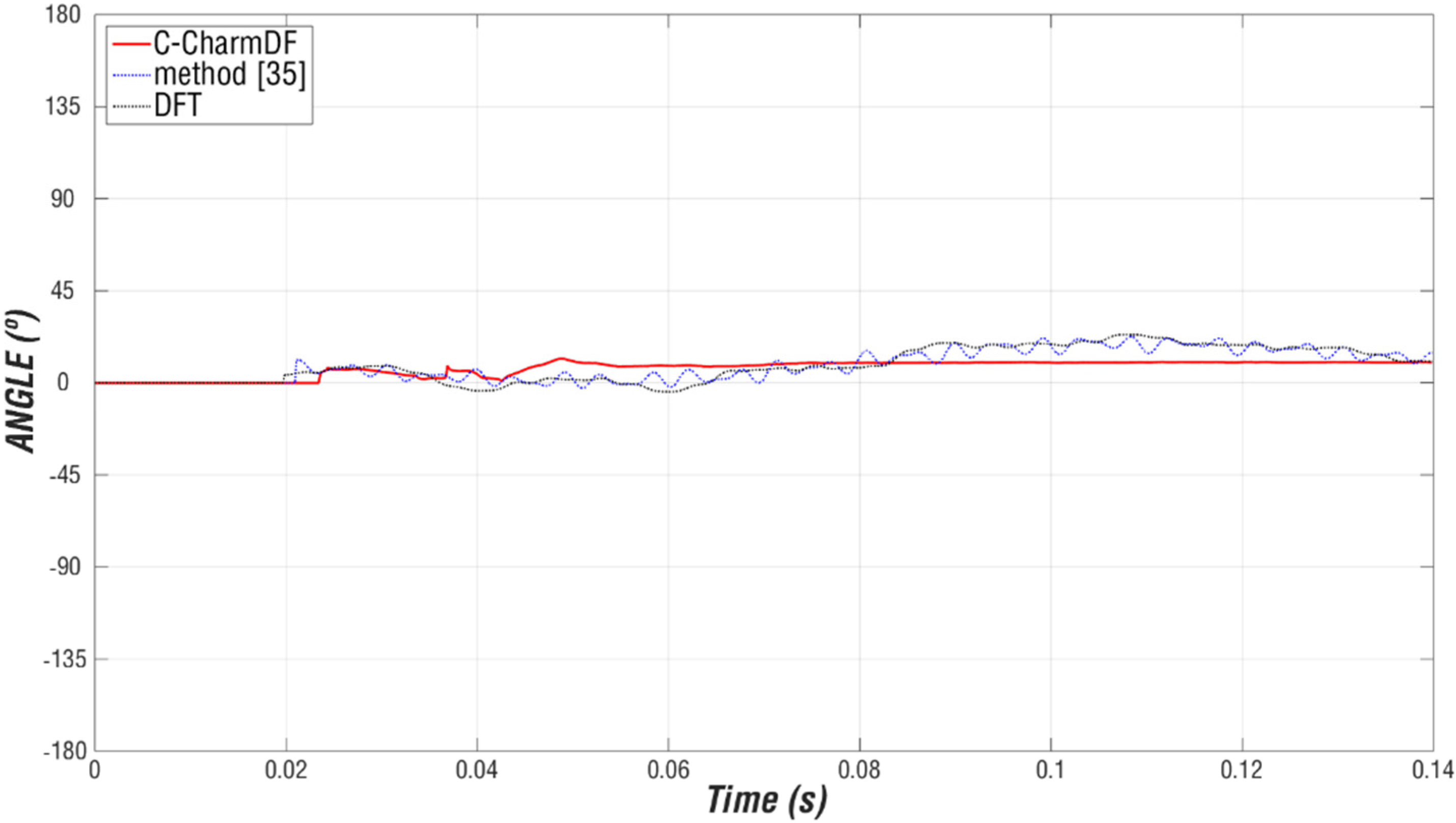
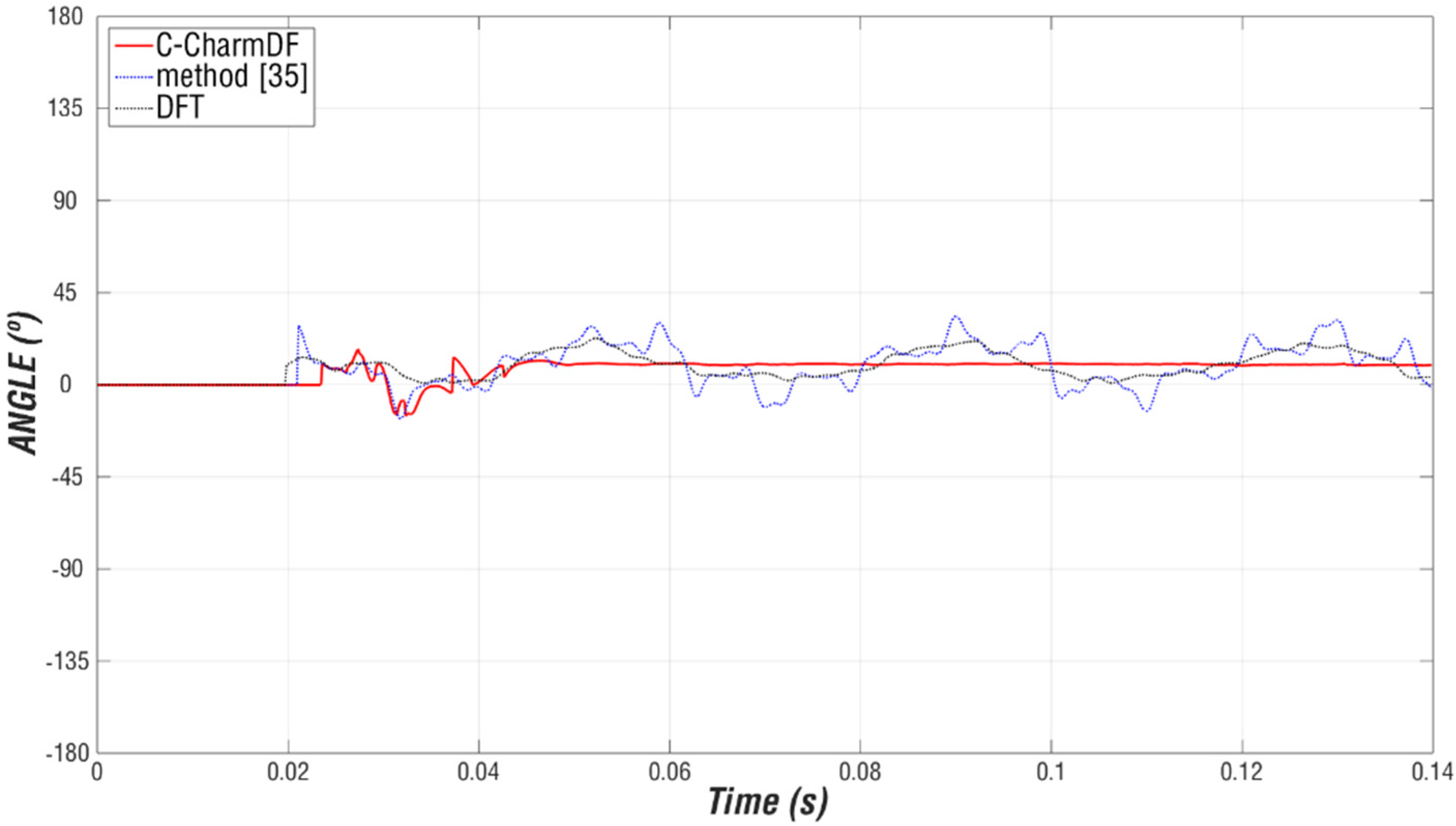
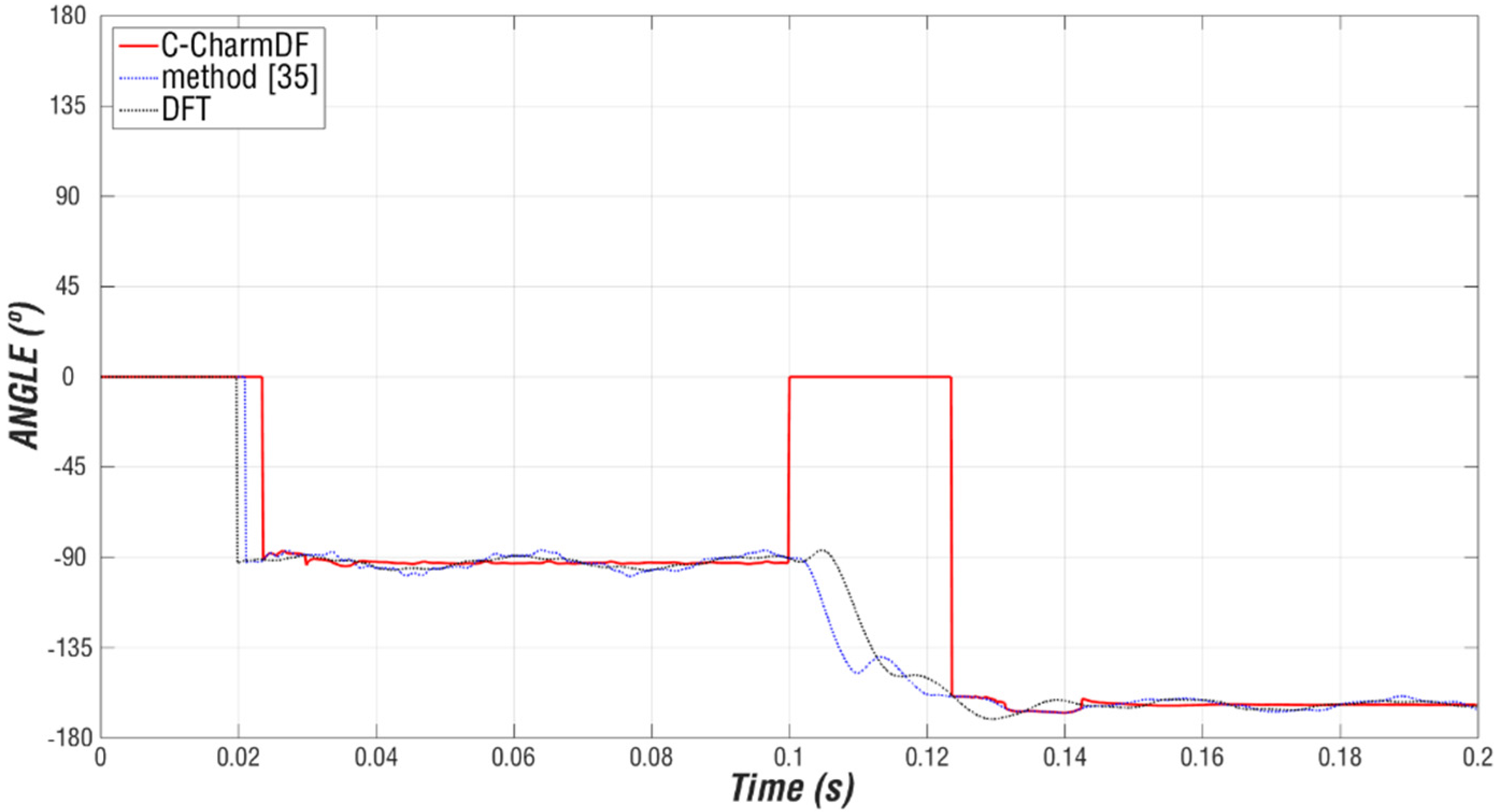
- The estimation of the fundamental phasor angle, with a comparison of the result applying the DFT and the method proposed in [35].
3.1. Evaluation of the Method for Type A Signals
- The response time of the proposed method was independent of the analyzed wave characteristics. According to Figure 7, the response time was the same as () samples (just over one signal cycle) from the moment that the original signal began to be analyzed. This means that the method began to provide results (modulus and angle) just a bit later than one cycle after beginning to receive data.
- The response converged quickly to the correct value (modulus and phase).
- The proposed method reached the solution quickly and, once achieving it, had no significant oscillations, even with severe signals in demanding conditions.
- The other methods were not able to carry out a correct estimation of the analyzed signals.
- The presence of more than one exponential and the added signal noise minimally affected the precision of the proposed method and the speed of its convergence to the correct value.
- The convergence speed depended on the types and numbers of interharmonic components present in the signal. The higher the interharmonic signal frequencies were, the faster and the better the digital filter converged. The slowest interharmonic components in frequency, such as subharmonics, slowed down the convergence process because more signal information was needed to detect them and to make the estimation correctly. Moreover, the increase in the number of interharmonics present in the signal made the process of detection difficult (more noticeable with lower frequencies). This fact meant having higher convergence times to the correct value than those that could be obtained with a lower number of components.
- In Case 1, with a single high-frequency interharmonic, the convergence took place almost immediately from the necessary delay due to processing.
- In Case 2, the convergence was produced approximately one cycle after the processing delay on account of the subharmonic contained in the signal, which delayed the estimation.
- In Case 3, given that the signal contained three interharmonic components, and one of them could be considered slow (frequency close to the fundamental), the method suffered a delay in obtaining the correct phasor values of the fundamental component. This delay was a bit longer than one and a half cycles from the response time.
- In any case, the method converged quickly to the correct value (less than three cycles from the moment that the first information of the analyzed signal was received).
- As explained in Section 2.2, the effect of the exponential term could almost completely be removed by improving the filter response. However, the maximum noise present in the analyzed signal must be taken into account to choose the most suitable s slip value. This requires a compromise between the speed required for the protection and the maximum noise present in the analyzed signal.
- The harmonic and interharmonic components that could be detected could have a higher frequency following the Nyquist theorem [37]. Nevertheless, this is not critical for the method, as the numerical relay antialiasing filter does not allow higher frequencies of 400 Hz (in 50 Hz networks) to go through it.
- The detection of the interharmonic components can be done with higher precision because an increase in the sampling frequency entails a better spectral resolution [36]. Consequently, the phasor detection can be more concrete. This does not imply the possibility of reducing the interharmonics processing and detection time. Having a better spectral resolution does not mean having more spectral information. The interharmonic phasors can be detected with less error but not faster. A higher amount of temporal information is needed for more spectral information. This is the reason why the method uses an adaptive data window of the Raharm signal for the process of interharmonic components estimation.
3.2. Evaluation of the Method for Type B Signals
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Phadke, A.G.; Thorp, J.S. Computer Relaying for Power Systems, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Pavlatos, C.; Vita, V.; Dimopoulos, A.C.; Ekonomou, L. Transmission lines′ fault detection using syntactic pattern recognition. Energy Syst. 2019, 10, 299–320. [Google Scholar] [CrossRef]
- Chen, K.; Huang, C.; He, J. Fault detection, classification and location for transmission lines and distribution systems: A review on the methods. High Volt. 2016, 1, 25–33. [Google Scholar] [CrossRef]
- Pavlatos, C.; Vita, V. Linguistic representation of power system signals. In Electricity Distribution. Energy Systems Series; Springer: Berlin/Heidelberg, Germany, 2016; pp. 285–295. [Google Scholar]
- Yang, J.Z.; Liu, C.W. A new method for transmission line fault signal phases estimation. In Proceedings of the IEEE ICSS2005 International Conference on Systems & Signals, Kaohsiung, Taiwan, 28–29 April 2005. [Google Scholar]
- Pan, J.; Vu, K.; Hu, Y. An eficiente compensation algorithm for current transformer saturation effects. IEEE Trans. Power Deliv. 2004, 19, 1623–1628. [Google Scholar] [CrossRef]
- Sidhu, T.S.; Ghotra, D.S.; Sachdev, M.S. An adaptative distance relay and its performance comparison with a fixed data window distance relay. IEEE Trans. Power Deliv. 2002, 17, 691–697. [Google Scholar] [CrossRef]
- Rosolowski, E.; Izykowski, J.; Kasztenny, B. A new half-cycle adaptive phasor estimator immune to the decaying DC component for digital protective relaying. Proceedings of Thirty-Second Annual NAPS-2000, Waterloo, ON, Canada, 23–24 October 2000. [Google Scholar]
- Benmouyal, G. Removal of DC-offset in current waveforms using digital mimic filtering. IEEE Trans. Power Deliv. 1995, 10, 621–630. [Google Scholar] [CrossRef]
- Gu, J.-C.; Yu, S.-L. Removal of DC offset in current and voltage signals using a novel Fourier filter algorithm. IEEE Trans. Power Deliv. 2000, 15, 73–79. [Google Scholar]
- Guo, Y.; Kezunovic, M.; Chen, D. Simplified algorithms for removal of the effect of exponentially decaying DC-offset on the Fourier algorithm. IEEE Trans. Power Deliv. 2003, 18, 711–717. [Google Scholar]
- Sidhu, T.S.; Zhang, X.; Albasri, F.; Sachdev, M.S. Discrete-Fourier-transform-based technique for removal of decaying DC offset from phasor estimates. IET Proc. Gener. Transm. Distrib. 2003, 150, 745–752. [Google Scholar] [CrossRef]
- Lázaro, J.; Miñambres, J.F.; Zorrozua, M.A. Filtering Techniques: An historical overview and summary of current status. In Proceedings of the International Conference on Renewable Energies and Power Quality (ICREPQ′13), Bilbao, Spain, 22 March 2013. [Google Scholar]
- Ren, J.; Kezunovic, M. Elimination of DC Offset in Accurate Phasor Estimation Using Recursive Wavelet Transform. In Proceedings of the IEEE Power Energy Society PowerTech, Bucharest, Romania, 28 June–2 July 2009. [Google Scholar]
- Wong, C.-K.; Leong, I.-T.; Lei, C.-S.; Wu, J.-T.; Han, Y.-D. A novel algorithm for phasor calculation based on wavelet analysis. In Proceedings of the Power Engineering Society Summer Meeting, Vancouver, BC, Canada, 15–19 July2001. [Google Scholar]
- Liang, F.; Jeyasurya, B. Transmission line distance protection using wavelet transform algorithm. IEEE Trans. Power Deliv. 2004, 19, 545–553. [Google Scholar] [CrossRef]
- Zahra, F.; Jeyasurya, B.; Quaicoe, J.E. High-speed transmission line relaying using artificial neural networks. Electr. Power Syst. Res. 2000, 53, 173–179. [Google Scholar] [CrossRef]
- Vasilic, S.; Kezunovic, M. New Design of a Neural Network Algorithm for Detecting and Classifying the Transmission Line Faults. In Proceedings of the IEEE PES Transmission & Distribution Conference, Atlanta, GA, USA, 28 October—2 November 2001. [Google Scholar]
- Cheong, W.J.; Aggarwal, R.K. Accurate fault location in high voltage transmission systems comprising an improved thyristor controlled series capacitor model using wavelet transforms and neural network. In Proceedings of the Transmission and Distribution Conference and Exhibition 2002—Asia Pacific, Yokohama, Japan, 6–10 October 2002. [Google Scholar]
- Martinez-Lozano, M.; Martinez, J. Clasificación y Localización de Faltas, utilizando Wavelets y Redes Neurales. In Proceedings of the Noveno Congreso Hispano—Luso de Ingeniería Eléctrica, Marbella, Spain, 30 June–2 July 2005. [Google Scholar]
- Silva, K.M.; Neves, W.L.A.; Souza, B.A. Distance protection using a novel phasor estimation algorithm based on wavelet transform. In Proceedings of the IEEE Power Engineering Society General Meeting, Pittsburgh, PA, USA, 20–24 July 2008. [Google Scholar]
- Srivani, S.G.; Vittal, K.P. On line fault detection and an adaptive algorithm to fast distance relaying. In Proceedings of the Joint International Conference on Power System Technology and IEEE Power India Conference 2008 (POWERCON 2008), New Delhi, India, 12–15 October 2008. [Google Scholar]
- Nam, S.-R.; Park, J.-Y.; Kang, S.-H.; Kezunovic, M. Phasor Estimation in the Presence of DC Offset and CT Saturation. IEEE Trans. Power Deliv. 2009, 24, 1842–1849. [Google Scholar] [CrossRef]
- Wu, Q.H.; Zhang, J.F.; Zhang, D.J. Ultra-high-speed directional protection of transmission lines using mathematical morphology. IEEE Trans. Power Deliv. 2003, 18, 1127–1133. [Google Scholar] [CrossRef]
- Buse, J.; Shi, D.Y.; Ji, T.Y.; Wu, Q.H. Decaying DC offset removal operator using mathematical morphology for phasor measurement. In Proceedings of the 2010 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT Europe), Gothenburg, Sweden, 11–13 October 2010. [Google Scholar]
- Byeon, G.; Oh, S.; Jang, G. A New DC Offset Removal Algorithm Using an Iterative Method for Real-Time Simulation. IEEE Trans. Power Deliv. 2011, 26, 2277–2286. [Google Scholar] [CrossRef]
- Oliveira, A.D.; Silva, L.R.M.; Duque, C.A.; Cerqueira, A.S. Fundamental Component Phasor Estimation in Presence of DC Exponential Decay, Harmonics and Noise. J. Control. Autom. Electr. Syst. 2013, 24, 784–793. [Google Scholar] [CrossRef]
- Oliveira, N.L.S.; Souza, B.A. Análise da Resposta no Tempo de Algoritmos para Estimação de Fasores utilizados em Relés Digitais. In Proceedings of the IV Simpósio Brasileiro de Sistemas Elétricos (SBSE 2012), Goiânia, Goiás, Brazil, 15–18 May 2012. [Google Scholar]
- Kim, Y.S.; Kim, C.-H.; Ban, W.-H.; Park, C.-W. A Comparative Study on Frequency Estimation Methods. J. Electr. Eng. Technol. 2013, 8, 70–79. [Google Scholar] [CrossRef]
- Oliveira, N.L.S.; Souza, B.A. Comparative Analysis of Algorithms for Elimination of Exponentially Decaying DC Component. In Proceedings of the IWSSIP 2012, Vienna, Austria, 11–13 April 2012. [Google Scholar]
- Miñambres, J.F.; Lázaro, J.; Zorrozua, M.A.; Sánchez, M.; Larrea, B.; Antiza, I. Stability and accuracy of Digital Filters in the presence of Interharmonics. In Proceedings of the 13th Spanish-Portuguese Congress on Electrical Engineering (13CHLIE), Valencia, Spain, 3–5 July 2013. [Google Scholar]
- Mishra, D.P. Interharmonics Calculation using Adaptive Window Width of time varying load. In Proceedings of the National Conference on Recent Advances in Modern Power Systems (RAMPS-2012), Burla, Odisha, India, 30 December 2012. [Google Scholar]
- Mojiri, M.; Karimi-Ghartemani, M.; Bakhshai, A. Processing of Harmonics and Interharmonics Using an Adaptive Notch Filter. IEEE Trans. Power Deliv. 2010, 25, 534–542. [Google Scholar] [CrossRef]
- Zhang, Q.; Liu, H.; Chen, H.; Li, Q.; Zhang, Z. A Precise and Adaptive Algorithm for Interharmonics Measurement Based on Iterative DFT. IEEE Trans. Power Deliv. 2007, 23, 1728–1735. [Google Scholar] [CrossRef]
- Lázaro, J.; Miñambres, J.F.; Zorrozua, M.A. Selective estimation of harmonic components in noisy electrical signals for protective relaying purposes. IJEPES 2014, 56, 140–146. [Google Scholar] [CrossRef]
- Dorran, D. Audio Time-Scale Modification. Ph.D. Thesis, Technological University Dublin, Dublin, Ireland, 2006. [Google Scholar]
- Oppenheim, A.V.; Schafer, R.W. Discrete-Time Signal. Processing, 3rd ed.; Pearson Prentice Hall: Hoboken, NJ, USA, 2012. [Google Scholar]
- Lyons, R.G. Understanding Digital Signal. Processing, 2nd ed.; Pearson Prentice Hall: Hoboken, NJ, USA, 2004. [Google Scholar]
- IEC. IEC Std. 61000-4-30. Power Quality Measurement Methods, Testing and Measurements Techniques, 1.0 ed.; IEC: Geneva, Switzerland, 2003. [Google Scholar]
- IEC. IEC Std. 61000-4-7. General Guide on Harmonics and Interharmonics Measurements, for Power Supply System and Equipment Connected Thereto, 2.0 ed.; IEC: Geneva, Switzerland, 2002. [Google Scholar]
- Diego García, R.I. Análisis Wavelet Aplicado a la Medida de Armónicos, Interarmónicos y Subarmónicos en Redes de Distribución de Energía Eléctrica. Ph.D. Thesis, Universidad de Cantabria, Santander, Cantabria, Spain, 2006. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| C0 | C1 | C2 | τ1 (ms) | τ2 (ms) | h | Ah | fh (Hz) | αh (°) | z [n] |
| 100 | 80 | 50 | 100 | 50 | 8 | 100/h | 50h | 180h/18 | 1% A1 |
| Ai1 | fi1 (Hz) | αi1 (°) | |||||||
| 15 | 230 | −40 |
| C0 | C1 | C2 | τ1 (ms) | τ2 (ms) | h | Ah | fh (Hz) | αh (°) | z [n] |
| 100 | 80 | 50 | 100 | 50 | 8 | 100/h | 50h | 180h/18 | 1% A1 |
| Ai1 | fi1 (Hz) | αi1 (°) | Ai2 | fi2 (Hz) | αi2 (°) | ||||
| 20 | 42 | 30 | 14 | 270 | −60 |
| C0 | C1 | C2 | τ1 (ms) | τ2 (ms) | h | Ah | fh (Hz) | αh (°) | z [n] |
| 100 | 80 | 50 | 100 | 50 | 8 | 100/h | 50h | 180h/18 | 1% A1 |
| Ai1 | fi1 (Hz) | αi1 (°) | Ai2 | fi2 (Hz) | αi2 (°) | Ai3 | fi3 (Hz) | αi3 (°) | |
| 25 | 77 | 45 | 20 | 180 | −40 | 15 | 370 | −30 |
| Ai1 | fi1 (Hz) | αi1 (°) | Ai2 | fi2 (Hz) | αi2 (°) | Ai3 | fi3 (Hz) | αi3 (°) | |
|---|---|---|---|---|---|---|---|---|---|
| Case 1 | 14.98 | 230 | −39.81 | ||||||
| Case 2 | 19.7 | 41.89 | 32 | 14.11 | 270 | −60.69 | |||
| Case 3 | 25.1 | 77.05 | 43.9 | 20 | 180 | −39.8 | 15 | 370 | −29.99 |
Publisher′s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vazquez, J.; Miñambres, J.F.; Zorrozua, M.A.; Lázaro, J. Phasor Estimation of Transient Electrical Signals Composed of Harmonics and Interharmonics. Energies 2021, 14, 5166. https://doi.org/10.3390/en14165166
Vazquez J, Miñambres JF, Zorrozua MA, Lázaro J. Phasor Estimation of Transient Electrical Signals Composed of Harmonics and Interharmonics. Energies. 2021; 14(16):5166. https://doi.org/10.3390/en14165166
Chicago/Turabian StyleVazquez, Jon, Jose Felix Miñambres, Miguel Angel Zorrozua, and Jorge Lázaro. 2021. "Phasor Estimation of Transient Electrical Signals Composed of Harmonics and Interharmonics" Energies 14, no. 16: 5166. https://doi.org/10.3390/en14165166
APA StyleVazquez, J., Miñambres, J. F., Zorrozua, M. A., & Lázaro, J. (2021). Phasor Estimation of Transient Electrical Signals Composed of Harmonics and Interharmonics. Energies, 14(16), 5166. https://doi.org/10.3390/en14165166