
Study on Image Correction and Optimization of Mounting Positions of Dual Cameras for Vehicle Test



Abstract
:1. Introduction
- Introduction of the lane detection algorithm.
- Input image distortion correction, stereo rectification, and focal length correction.
- Experimental evaluation of algorithm precision according to three variables for optimal dual-camera positioning.
- Proposal of equations for calculating the distance between the vehicle and objects in front of it in straight and curved roads for test evaluation.
- Applicability evaluation through real vehicle tests using the optimal camera position determined in step 3 and the distance calculation equation proposed in step 4.
2. Theoretical Background for Dual Camera-Based Image Correction and the Proposed Method of Distance Measurement
2.1. Road Lane Detection Method
2.1.1. Theoretical Background for Lane Detection
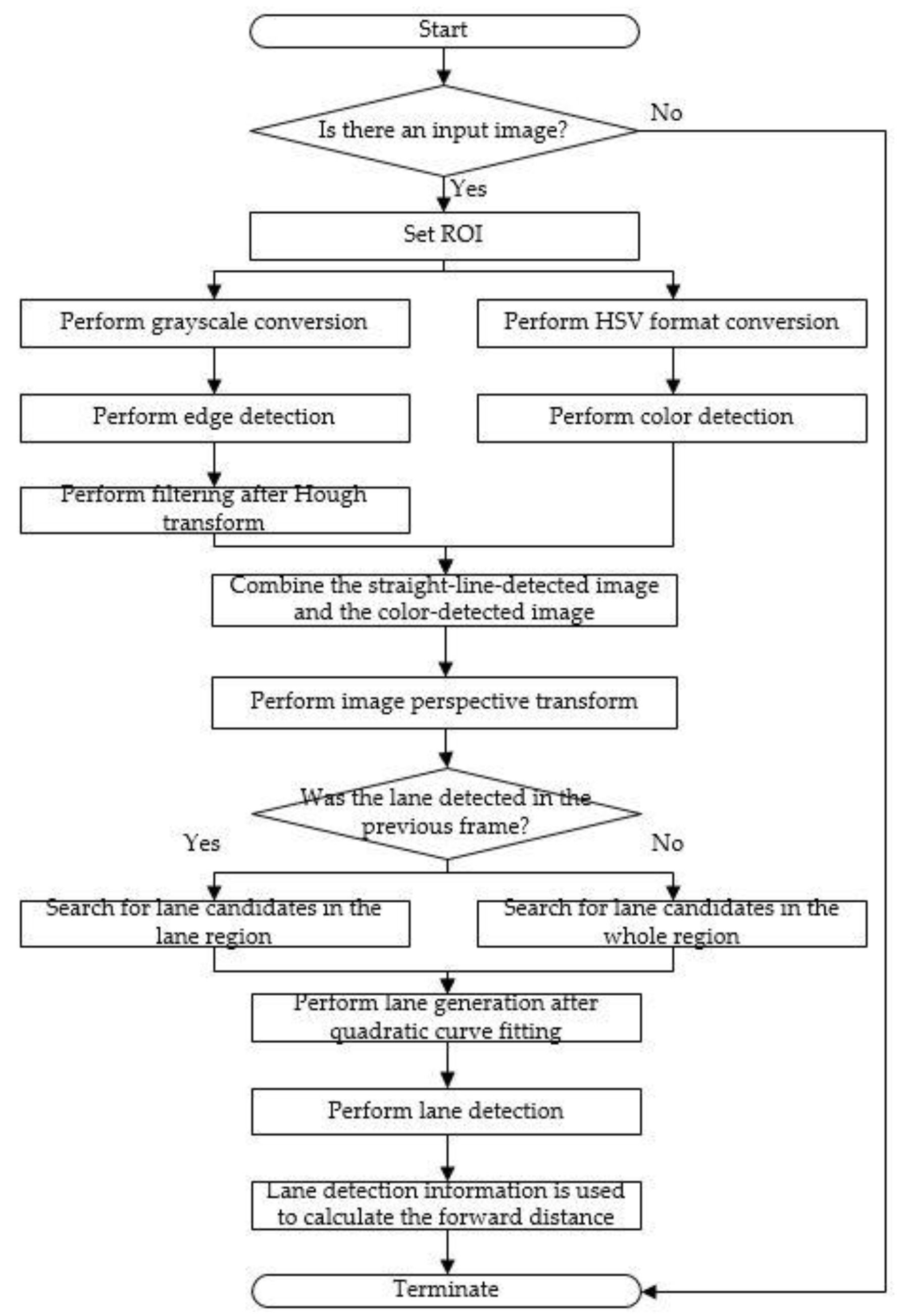
2.1.2. Lane Detection Algorithm
2.2. Method for Calibrating Distance Measurement
2.2.1. Image Distortion Correction
2.2.2. Image Rectification
2.2.3. Focal Length Correction
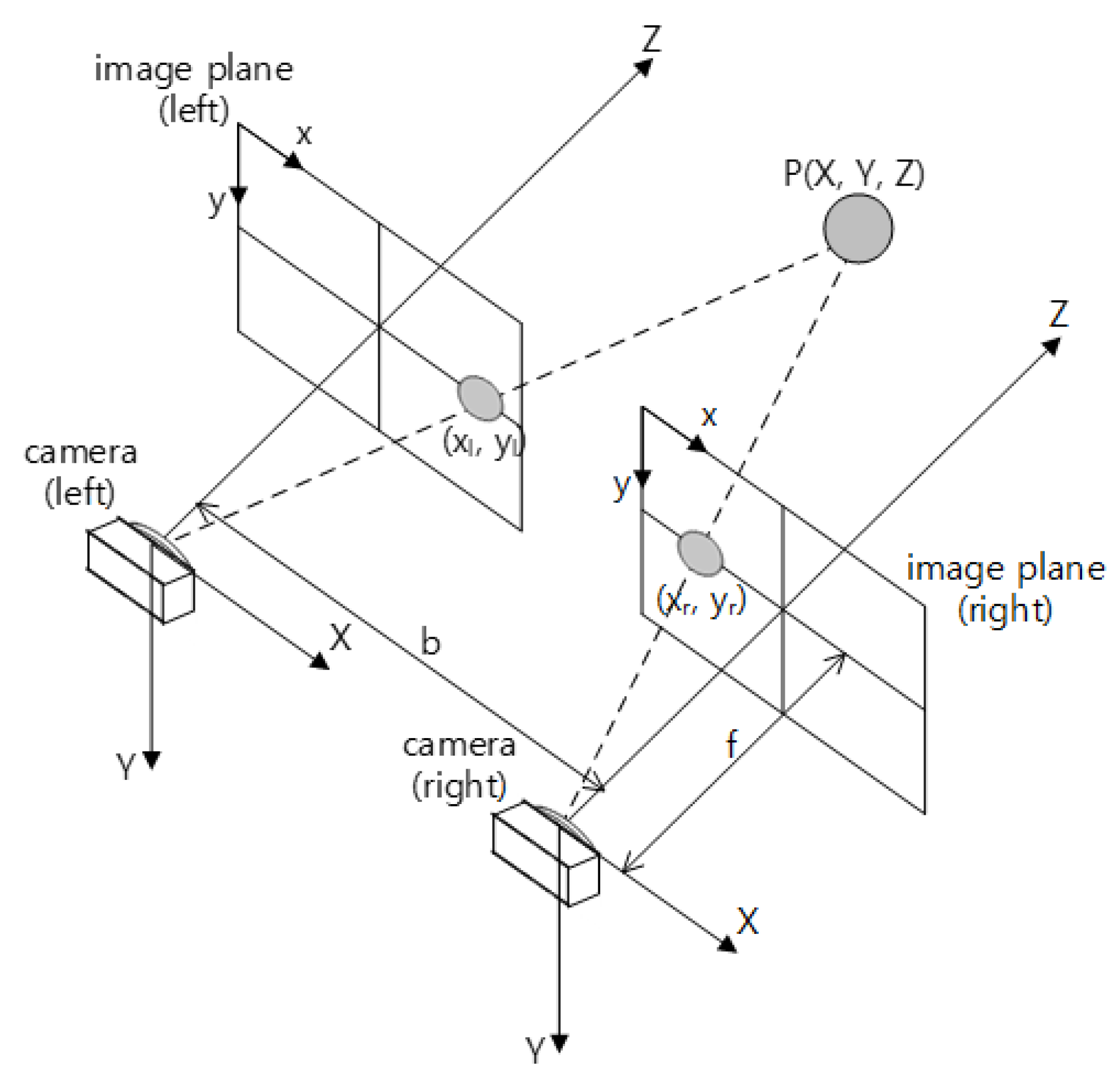
- —the coordinates of the object; the local coordinate system with their origins at the center of dual cameras.
- —focal length.
- —baseline.
- —disparity.
- —the coordinates of the object in the left camera image plane.
- —the coordinates of the object in the right camera image plane.
- —the coordinates of the object in the universal Cartesian coordinate system.
- —distance to the object.
- ,—the coefficients obtained via the focal length correction.
3. Optimization of the Mounting Positions of Dual Cameras
3.1. Configurations of Test Variables
3.1.1. Mounting Heights of Cameras
3.1.2. Baseline of Cameras
3.1.3. Angle of Inclination of Mounted Cameras
3.2. Test Results for Optimization of Mounting Positions
4. Proposed Theoretical Equation for Forward Distance Measurement
4.1. Measurement of the Distance to an Object in Front of the Vehicle on a Straight Road
- —the coordinates of the object considering the angle of inclination of mounted cameras; the local coordinate system with their origins at the center of dual cameras.
- —the angle of inclination of the mounted cameras.
- —mounting heights of the cameras.
4.2. Measurement of the Distance to an Object in Front of the Vehicle on a Curved Road
- —the vertical distance between the vehicle and object.
- —the angle subtended by the vehicle and the object at the center of curvature of the road
- —the radius of curvature of the road.
- —the distance between the vehicle and the object along the curved road.
4.3. Integrated Equation
- —the distance between the vehicle and the object in front of the vehicle.
5. Vehicle Test and Validation
5.1. Vehicle Used for Vehicle Test
5.2. Vehicle Test Location and Conditions
5.3. Test Results
6. Conclusions
- (1)
- Dual camera images were used for lane detection. The ROI was selected so as to reduce the duration required for image processing, and the yellow color was extracted to HSV channels. Then, the result was combined with a grayscale conversion of the input image. Following edge detection using the Canny edge detector, the Hough transform was used to obtain the initial and final points of each straight line. After calculating the gradients of the straight lines, the lane was filtered and determined.
- (2)
- Height, inter-camera baseline, and angle of inclination were considered as variables for optimizing the mounting positions of the dual cameras on the vehicle. Vehicle tests were conducted on actual roads after mounting the dual cameras on a real vehicle. The test results revealed that the error rate was the smallest (0.86%), corresponding to a height of 40 cm, a baseline of 30 cm, and an angle of 12°. Hence, this was considered to be the optimal position.
- (3)
- Theoretical equations were proposed for the measurement of the distance between the vehicle and an object in front of it on straight and curved roads. The dual cameras were mounted on the identified optimal positions to validate the proposed equations. Vehicle tests were conducted corresponding to stationary and driving states on straight and curved roads. On the straight road, maximum error rates of 3.54% and 5.35% were observed corresponding to the stationary and driving states, respectively. Meanwhile, on the curved road, the corresponding values were 9.13% and 9.40%, respectively. Because the error rates were less than 10%, the proposed equation for the measurement of the distance to objects in front of a vehicle was considered to be reliable.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- On-Road Automated Driving (ORAD) Committee. J3016_202104: Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles; SAE International: Warrendale, PA, USA, 2021; pp. 4–29. [Google Scholar]
- Kee, S.C. A study on the technology trend of autonomous vehicle sensor. TTA J. 2017, 10, 16–22. [Google Scholar]
- Lee, S.; Lee, S.; Choi, J. Correction of radial distortion using a planar checkerboard pattern and its image. IEEE Trans. Consum. Electron. 2009, 55, 27–33. [Google Scholar] [CrossRef]
- Habib, A.; Mazaheri, M.; Lichti, D. Practical in situ implementation of a multicamera multisystem calibration. J. Sens. 2018, 2018, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.Y.; Lee, S.B. A study on image processing algorithms for improving lane detectability at night based on camera. Trans. Korea Soc. Automot. Eng. 2013, 21, 51–60. [Google Scholar] [CrossRef]
- Kim, J.S.; Moon, H.M.; Pan, S.B. Lane detection based open-source hardware according to change lane conditions. Smart Media J. 2017, 6, 15–20. [Google Scholar]
- Choi, Y.G.; Seo, E.Y.; Suk, S.Y.; Park, J.H. Lane detection using gaussian function based RANSAC. J. Embed. Syst. Appl. 2018, 13, 195–204. [Google Scholar] [CrossRef]
- Kalms, L.; Rettkowski, J.; Hamme, M.; Göhringer, D. Robust lane recognition for autonomous driving. In Proceedings of the IEEE 2017 Conference on Design and Architectures for Signal and Image Processing, Dresden, Germany, 27–29 September 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, X.; Zhao, L.; Zhang, G. Vision-based lane departure detection using a stacked sparse autoencoder. Math. Probl. Eng. 2018, 2018, 1–15. [Google Scholar] [CrossRef]
- Andrade, D.C.; Bueno, F.; Franco, F.R.; Silva, R.A.; Neme, J.H.Z.; Margraf, E.; Omoto, W.T.; Farinelli, F.A.; Tusset, A.M.; Okida, S.; et al. A novel strategy for road lane detection and tracking based on a vehicle’s forward monocular. Trans. Intell. Transp. Syst. 2019, 20, 1497–1507. [Google Scholar] [CrossRef]
- Bae, B.G.; Lee, S.B. A study on calculation method of distance with forward vehicle using single-camera. In Proceedings of the Symposium of the Korean Institute of Communications and Information Sciences, Korea Institute of Communication Sciences, Jeju, Korea, 19–21 June 2019; pp. 256–257. [Google Scholar]
- Park, M.; Kim, H.; Choi, H.; Park, S. A study on vehicle detection and distance classification using mono camera based on deep learning. J. Korean Inst. Intell. Syst. 2019, 29, 90–96. [Google Scholar] [CrossRef]
- Huang, L.; Zhe, T.; Wu, J.; Wu, Q.; Pei, C.; Chen, D. Robust inter-vehicle distance estimation method based on monocular vision. IEEE Access 2019, 7, 46059–46070. [Google Scholar] [CrossRef]
- Zhe, T.; Huang, L.; Wu, Q.; Zhang, J.; Pei, C.; Li, L. Inter-vehicle distance estimation method based on monocular vision using 3D detection. IEEE Trans. Veh. Technol. 2020, 69, 4907–4919. [Google Scholar] [CrossRef]
- Bougharriou, S.; Hamdaoui, F.; Mtibaa, A. Vehicles distance estimation using detection of vanishing point. Eng. Comput. 2019, 36, 3070–3093. [Google Scholar] [CrossRef]
- Kim, S.J. Lane-Level Positioning using Stereo-Based Traffic Sign Detection. Master’s Thesis, Kyungpook National University, Daegu, Korea, February 2016. [Google Scholar]
- Seo, B.G. Performance Improvement of Distance Estimation Based on the Stereo Camera. Master’s Thesis, Seoul National University, Seoul, Korea, February 2014; pp. 1–36. [Google Scholar]
- Kim, S.H.; Ham, W.C. 3D distance measurement of stereo images using web cams. IEMEK J. Embed. Syst. Appl. 2008, 3, 151–157. [Google Scholar]
- Song, W.; Yang, Y.; Fu, M.; Li, Y.; Wang, M. Lane detection and classification for forward collision warning system based on stereo vision. IEEE Sens. J. 2018, 18, 5151–5163. [Google Scholar] [CrossRef]
- Sie, Y.D.; Tsai, Y.C.; Lee, W.H.; Chou, C.M.; Chiu, C.Y. Real-time driver assistance systems via dual camera stereo vision. In Proceedings of the 2019 IEEE 89th Vehicular Technology Conference, IEEE, Kuala Lumpur, Malaysia, 28 April 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Sappa, A.D.; Dornaika, F.; Ponsa, D.; Geronimo, D.; Lopez, A. An efficient approach to onboard stereo vision system pose estimation. IEEE Trans. Intell. Transp. Syst. 2008, 9, 476–490. [Google Scholar] [CrossRef]
- Yang, L.; Li, M.; Song, X.; Xiong, Z.; Hou, C.; Qu, B. Vehicle speed measurement based on binocular stereovision system. IEEE Access 2019, 7, 106628–106641. [Google Scholar] [CrossRef]
- Zaarane, A.; Slimani, I.; Okaishi, W.A.; Atouf, I.; Hamdoun, A. Distance measurement system for autonomous vehicles using stereo camera. Array 2020, 5, 1–7. [Google Scholar] [CrossRef]
- Cafiso, S.; Graziano, A.D.; Pappalardo, G. In-vehicle stereo vision system for identification of traffic conflicts between bus and pedestrian. J. Traffic Transp. Eng. 2017, 4, 3–13. [Google Scholar] [CrossRef]
- Wang, H.M.; Ling, H.Y.; Chang, C.C. Object detection and depth estimation approach based on deep convolution neural networks. Sensors 2021, 21, 4755. [Google Scholar] [CrossRef]
- Lin, H.Y.; Dai, J.M.; Wu, L.T.; Chen, L.Q. A Vision based driver assistance system with forward collision and overtaking detection. Sensors 2020, 20, 5139. [Google Scholar] [CrossRef]
- Canny, J. A Computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, PAMI-8, 679–698. [Google Scholar] [CrossRef]
- Ilingworth, J.; Kittler, J. A survey of the hough transform. Comput. Vis. Graph. Image Process. 1988, 44, 87–116. [Google Scholar] [CrossRef]
- Lee, J.Y. Camera calibration and distortion correction. Korea Robot. Soc. Rev. 2013, 10, 23–29. [Google Scholar]
- Kim, S.I.; Lee, J.S.; Shon, Y.W. Distance measurement of the multi moving objects using parallel stereo camera in the video monitoring system. J. Korean Inst. Illum. Electr. Install. Eng. 2014, 18, 137–145. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Height (cm) | Baseline (cm) | Angle (°) | Average Error Rate (%) | Maximum Error Rate (%) |
|---|---|---|---|---|
| 30 | 10 | 3 | 13.28 | 48.62 |
| 7 | 14.07 | 45.36 | ||
| 12 | 14.15 | 53.04 | ||
| 20 | 3 | 6.89 | 23.66 | |
| 7 | 9.64 | 27.3 | ||
| 12 | 4.14 | 10.53 | ||
| 30 | 3 | 10.34 | 35.83 | |
| 7 | 9.5 | 33.35 | ||
| 12 | 8.34 | 33.99 | ||
| 40 | 10 | 3 | 5.55 | 13.77 |
| 7 | 7.84 | 15.38 | ||
| 12 | 8.18 | 26.9 | ||
| 20 | 3 | 4.93 | 15.19 | |
| 7 | 2.38 | 6.17 | ||
| 12 | 5.49 | 19.52 | ||
| 30 | 3 | 3.34 | 13.9 | |
| 7 | 1.88 | 5.69 | ||
| 12 | 0.86 | 2.15 | ||
| 50 | 10 | 3 | 10.62 | 32.49 |
| 7 | 3.77 | 10.94 | ||
| 12 | 8.19 | 27.67 | ||
| 20 | 3 | 2.47 | 5.81 | |
| 7 | 2.45 | 5.84 | ||
| 12 | 5.23 | 18.39 | ||
| 30 | 3 | 2.15 | 4.65 | |
| 7 | 2.45 | 8.0 | ||
| 12 | 1.32 | 2.34 |
| Name | Specification |
|---|---|
| Veracruz (vehicle) | Overall length: 4840 mm |
| Overall width: 1970 mm | |
| Overall height: 1795 mm | |
| Wheel base: 2805 mm | |
| Tread: 1670 mm |
| Name | Specification |
|---|---|
| C920 HD pro webcam (camera) | height: 43.3 mm |
| width: 94 mm | |
| depth: 71 mm | |
| field of view: 78° | |
| field of view (horizontal): 70.42° | |
| field of view (vertical): 43.3° | |
| image resolution: 1920 × 1080 p | |
| focal length: 3.67 mm |
| Velocity (km/h) | Minimum Radius of Curve According to Maximum Slope (m) | ||
|---|---|---|---|
| 6% | 7% | 8% | |
| 120 | 710 | 670 | 630 |
| 110 | 600 | 560 | 530 |
| 100 | 460 | 440 | 420 |
| 90 | 380 | 360 | 340 |
| 80 | 280 | 265 | 250 |
| 70 | 200 | 190 | 180 |
| 60 | 140 | 135 | 130 |
| 50 | 90 | 85 | 80 |
| Item | Condition |
|---|---|
| Road | flat, dry asphalt |
| Weather | sunny |
| Temperature (°C) | 9–12 |
| Scenario | Case | Real Distance (cm) | Calculated Distance (cm) | Error Rate (%) |
|---|---|---|---|---|
| Straight road, Stationary state | 1 | 1000 | 1008 | 0.78 |
| 2000 | 1975 | 1.24 | ||
| 3000 | 2931 | 2.29 | ||
| 4000 | 4032 | 0.81 | ||
| 2 | 1000 | 1001 | 0.08 | |
| 2000 | 1960 | 1.98 | ||
| 3000 | 3083 | 2.77 | ||
| 4000 | 3925 | 1.87 | ||
| 3 | 1000 | 1004 | 0.41 | |
| 2000 | 1973 | 1.36 | ||
| 3000 | 3106 | 3.54 | ||
| 4000 | 3956 | 1.09 | ||
| Straight road, Driving state | 1 | 1060 | 1053 | 0.65 |
| 2060 | 2066 | 0.31 | ||
| 3060 | - | - | ||
| 4060 | - | - | ||
| 2 | 1060 | 1004 | 5.32 | |
| 2060 | 2066 | 0.31 | ||
| 3060 | - | - | ||
| 4060 | - | - | ||
| 3 | 1060 | 1080 | 1.86 | |
| 2060 | 2170 | 5.35 | ||
| 3060 | - | - | ||
| 4060 | - | - | ||
| Curved road, Stationary state | 1 | 620 | 614 | 0.96 |
| 1120 | 1111 | 0.80 | ||
| 1620 | 1602 | 1.11 | ||
| 2120 | 2085 | 1.65 | ||
| 2 | 620 | 632 | 3.63 | |
| 1120 | 1098 | 1.06 | ||
| 1620 | 1630 | 1.26 | ||
| 2120 | 2303 | 9.13 | ||
| 3 | 620 | 562 | 7.89 | |
| 1120 | 1037 | 6.55 | ||
| 1620 | 1618 | 0.50 | ||
| 2120 | 2084 | 3.67 | ||
| Curved road, Driving state | 1 | 620 | 562 | 9.40 |
| 1120 | 1037 | 7.44 | ||
| 1620 | 1746 | 7.79 | ||
| 2120 | - | - | ||
| 2 | 620 | 585 | 4.12 | |
| 1120 | 1063 | 4.28 | ||
| 1620 | 1680 | 4.36 | ||
| 2120 | - | - | ||
| 3 | 620 | 562 | 9.39 | |
| 1120 | 1037 | 7.44 | ||
| 1620 | 1746 | 7.79 | ||
| 2120 | - | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, S.-H.; Kim, B.-J.; Lee, S.-B. Study on Image Correction and Optimization of Mounting Positions of Dual Cameras for Vehicle Test. Energies 2021, 14, 4857. https://doi.org/10.3390/en14164857
Lee S-H, Kim B-J, Lee S-B. Study on Image Correction and Optimization of Mounting Positions of Dual Cameras for Vehicle Test. Energies. 2021; 14(16):4857. https://doi.org/10.3390/en14164857
Chicago/Turabian StyleLee, Si-Ho, Bong-Ju Kim, and Seon-Bong Lee. 2021. "Study on Image Correction and Optimization of Mounting Positions of Dual Cameras for Vehicle Test" Energies 14, no. 16: 4857. https://doi.org/10.3390/en14164857
APA StyleLee, S.-H., Kim, B.-J., & Lee, S.-B. (2021). Study on Image Correction and Optimization of Mounting Positions of Dual Cameras for Vehicle Test. Energies, 14(16), 4857. https://doi.org/10.3390/en14164857