
Automatic Identification of Internal Wave Characteristics Affecting Bathymetric Measurement Based on Multibeam Echosounder Water Column Data Analysis

 , ,
, ,  ,
,  , and
, and
Abstract
:1. Introduction
2. Fundamentals
2.1. Internal Wave Phenomenon
2.2. Water Column Data Acquisition by the Mean of Multibeam Echosounder
3. Survey Area, Survey Equipment, and EnvironmentalConditions
3.1. Survey Equipment and CollectedData
3.2. DataAnalysis
3.2.1. Water Column Data Examination Using R2SFiles
3.2.2. Possibilities of TruePix™ FileUsage
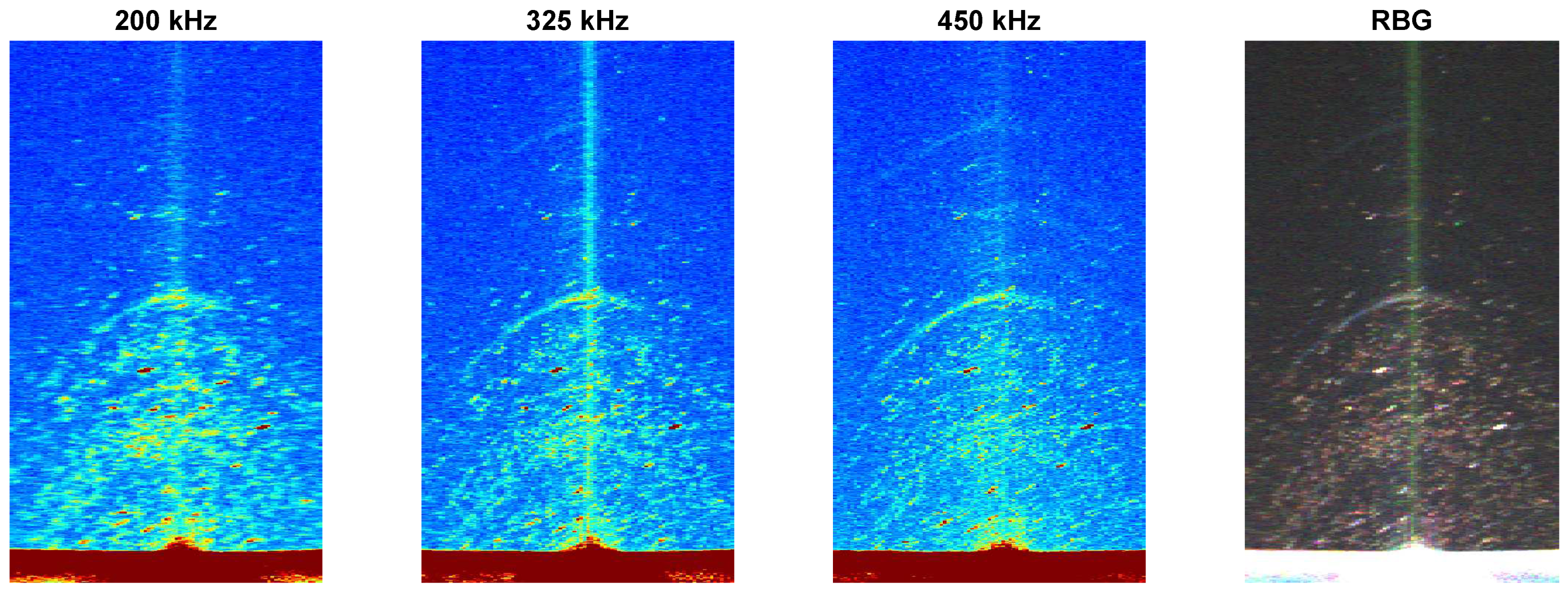
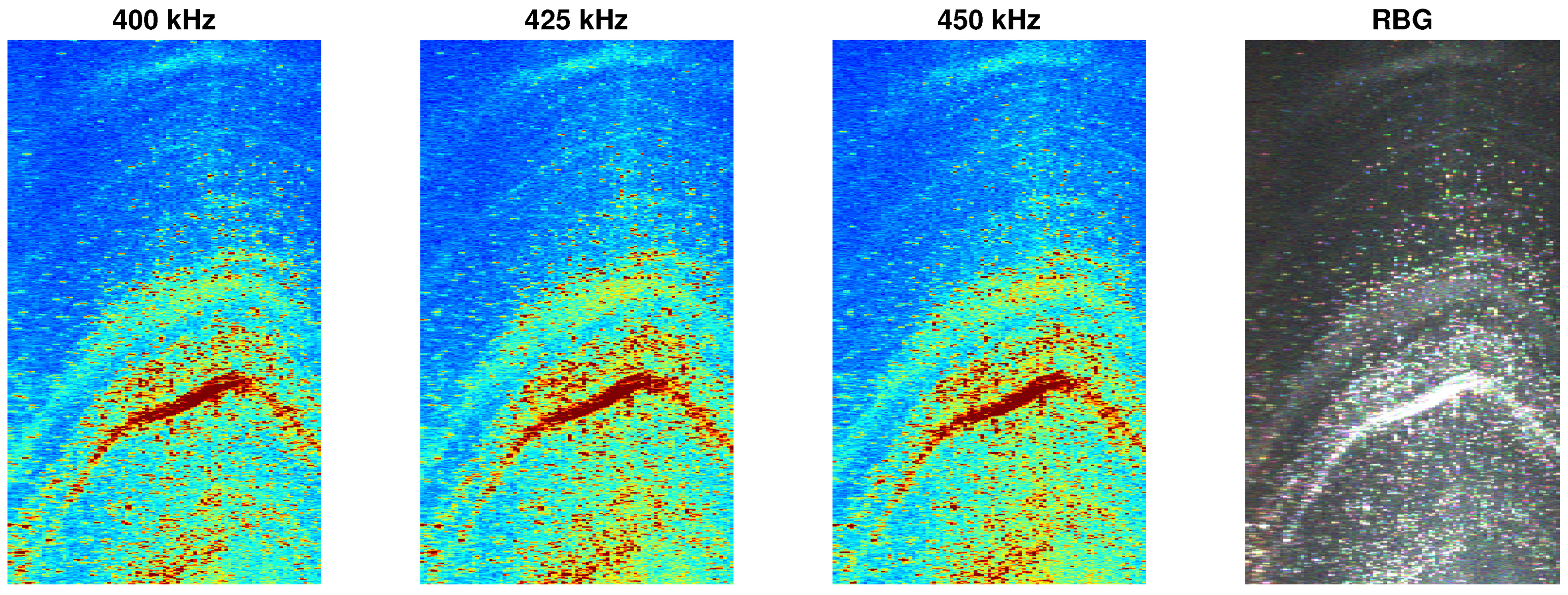
3.2.3. Observations Based on MultifrequencyRecords
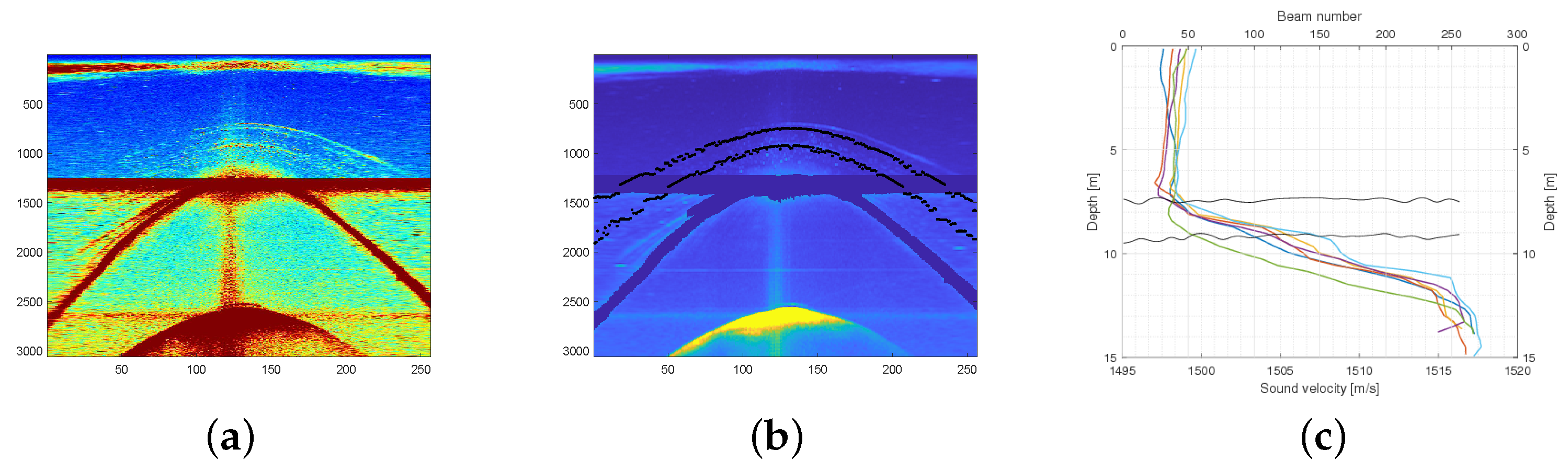
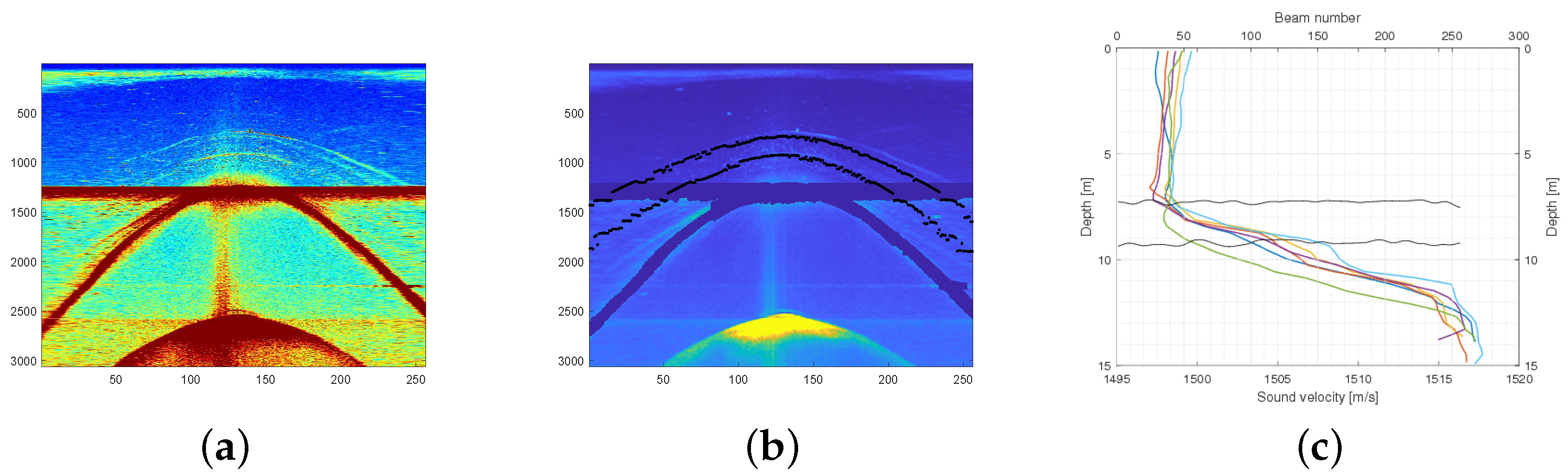
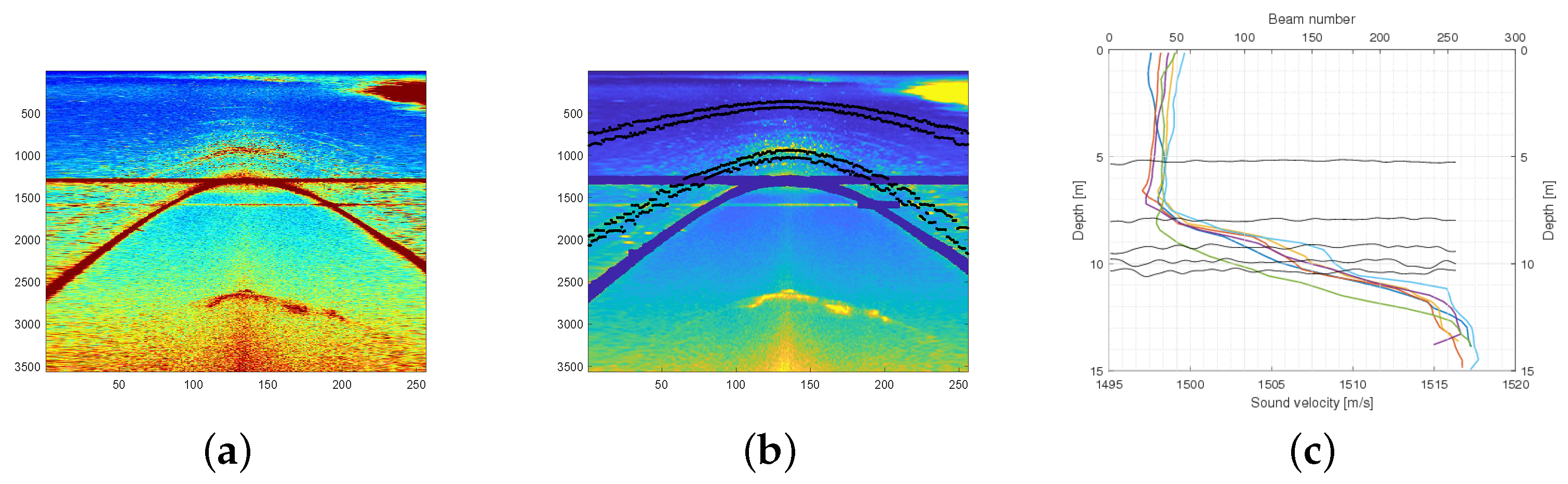
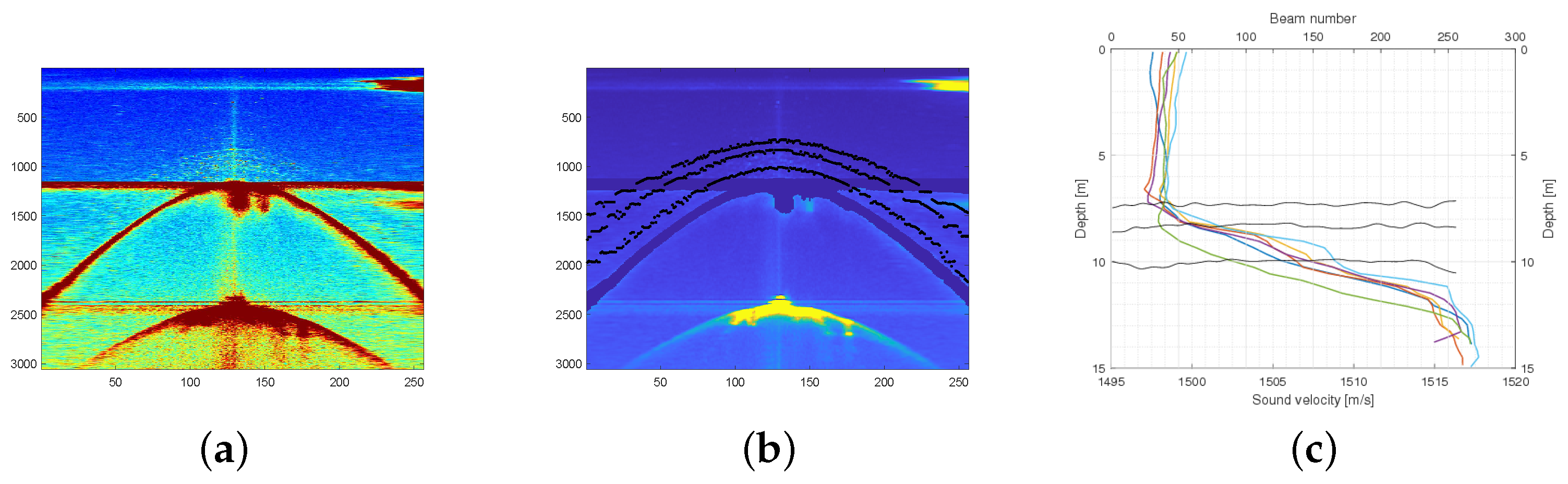
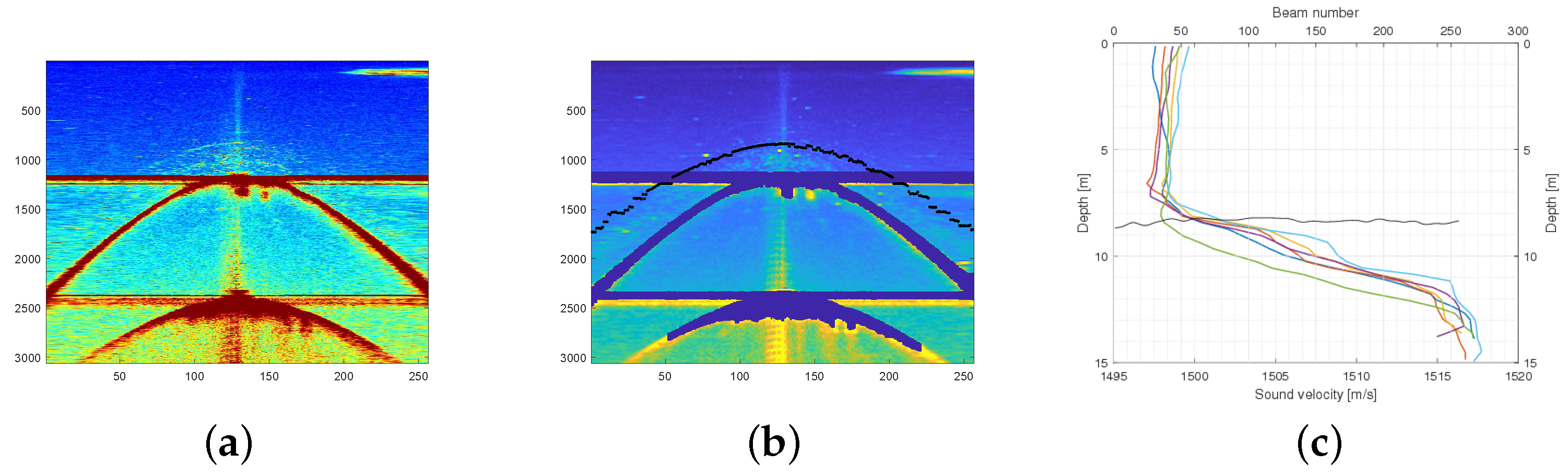
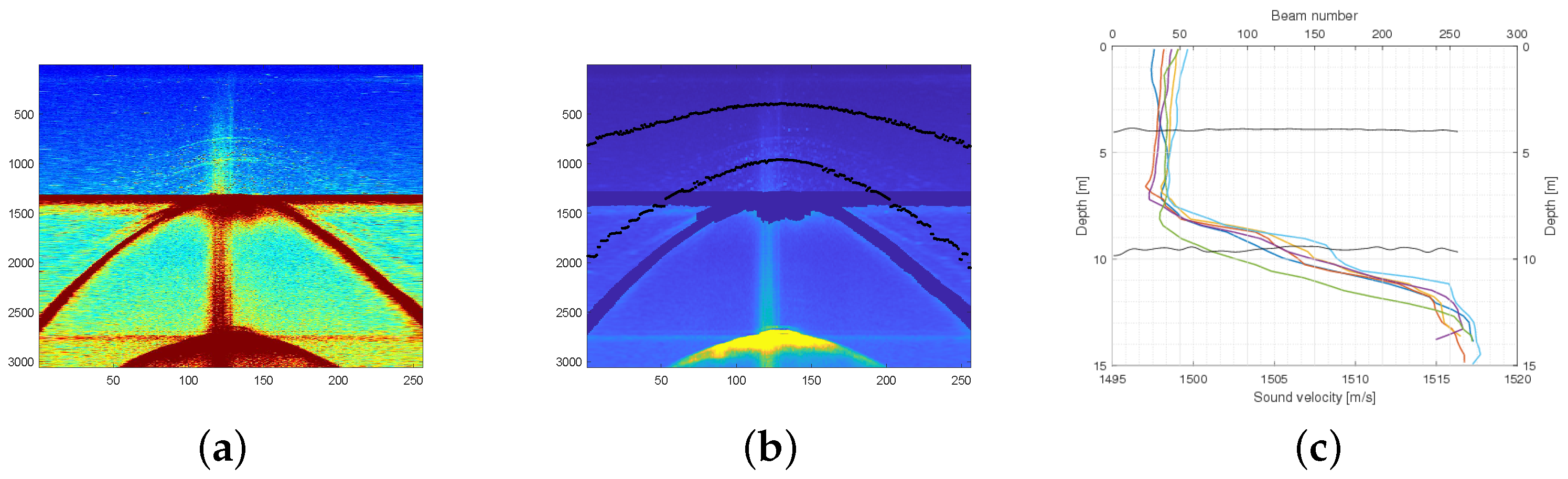
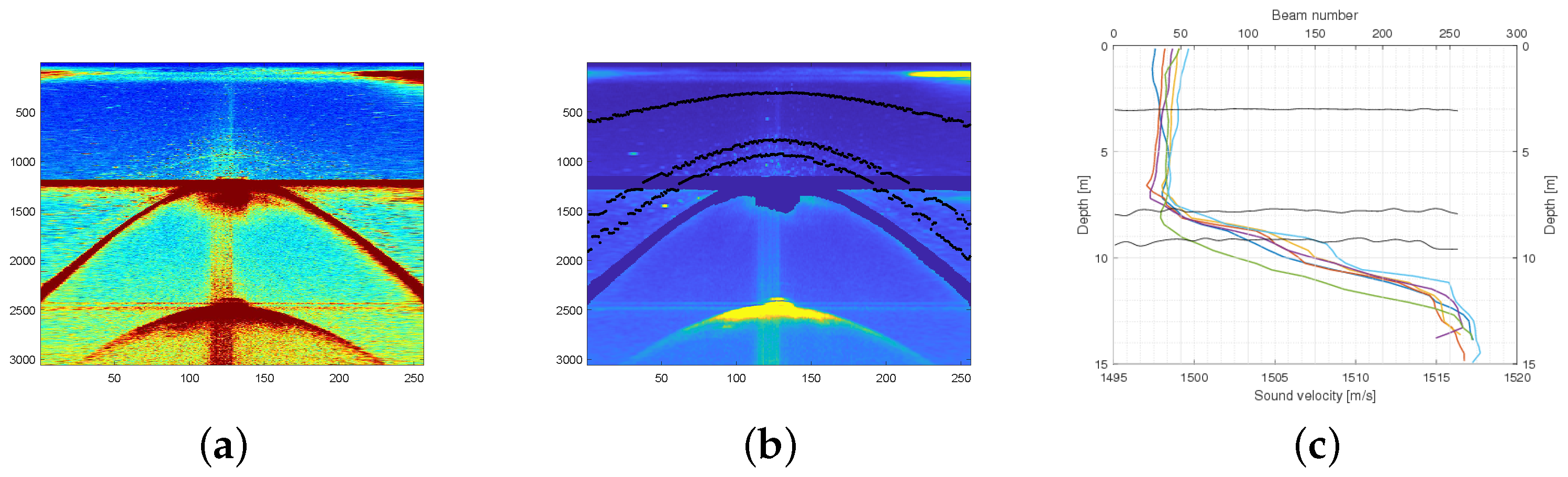
3.2.4. Automatic Detection of the Acoustic Reflection from Water Mass Boundaries in the Water ColumnData
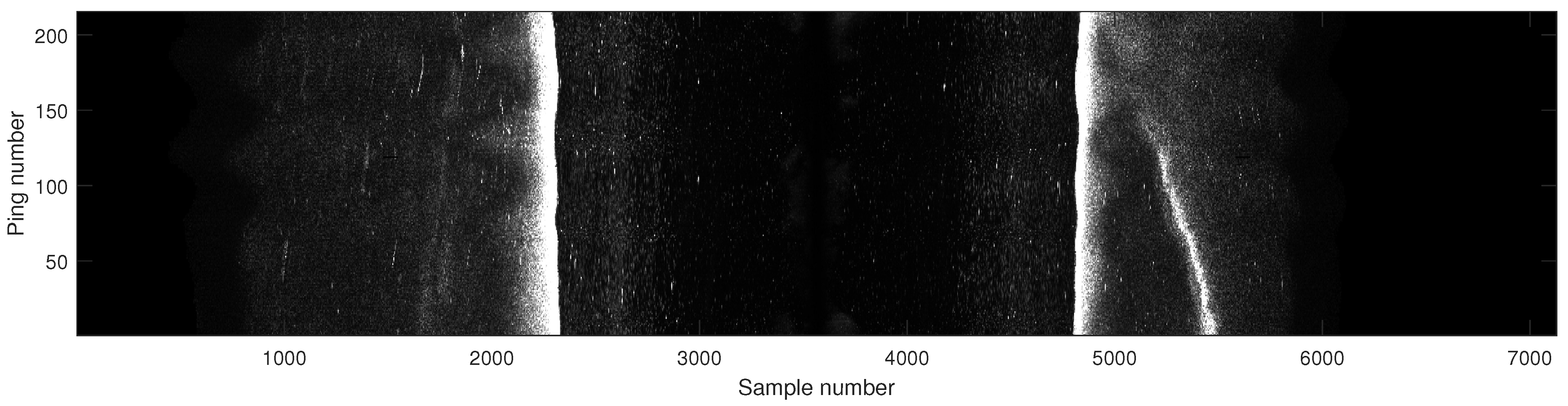
- Presenting the whole ping as a matrix of values representing the samples of all the beams: This is done for a series of a number of consecutive pings. This step is a preparatory stage, with the data simply treated as an image, allowing further processing by image processing techniques.
- De-noising by summing a number of consecutive pings: At the amplitude range referring to weak targets, the noise level makes the image difficult to process using the basic objects or edge detection methods. As proposed in Section 3.2.3, one of the possible methods of image de-noising, in case of a series of similar images presenting a similar scene, is the simple summation of a number of images. In the examples presented above, nine images were summed. It should be highlighted that this kind of mathematical operation means the averaging of data in time and space because we are dealing with the record from a moving sensor. However, if we realize that with the ping period of 0.055 s (in case of the Old Channel A data set), we average signals from 0.45 s of recordings, and if we consider the fact that the aim of this analysis is to reveal the information about the presence and characteristics of water mass boundaries and internal waves in our observations, this down-sampling seems to be acceptable.
- Smoothing: The Savitzky–Golay finite impulse response (FIR) smoothing filter with a polynomial order of 2 and frame length of 51 was applied to series of values from each beam independently, reducing the noise still remaining after the previous step.
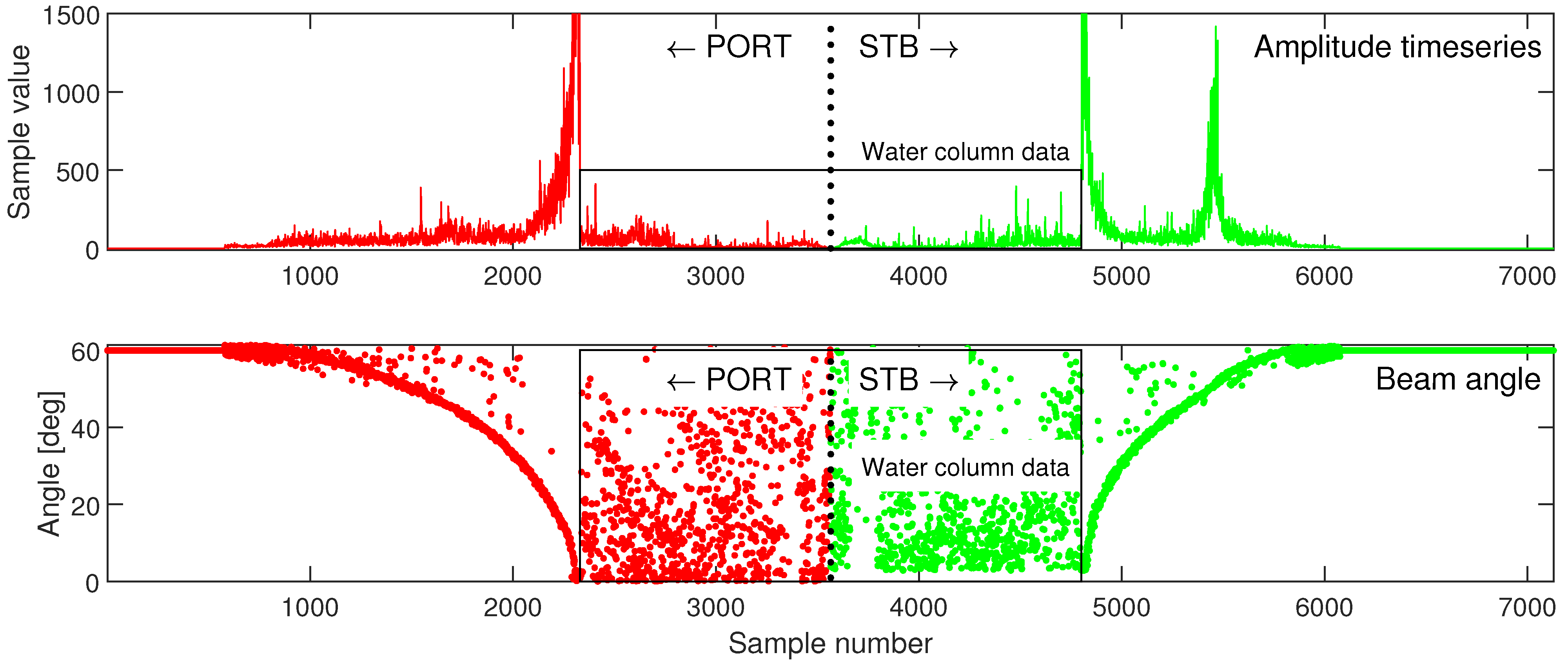
- Exclusion of the seabed and sidelobe areas from further analysis: High-magnitude values of samples corresponding to the main reflection from the seabed and the effect of sidelobes affect the operations performed on the areas of interest in the water column and outside the sidelobe. A large difference between those values and the “background” allows the exclusion of these areas easily by simple thresholding and by setting those samples to 0. The strong reflections from the seabed or solid objects in the water column are characteristic of a water column image and and are always present when a multibeam echosounder maps the seabed. Extracting these strong reflections allows for the further processing of the remaining data, which contains useful information for water column analysis.
- Contrast enhancement: This is done by the saturation of the bottom 1% and the top 1% of all pixel values. The embedded Matlab function imadjust was used for this purpose and appeared to be sufficient for the proposed method.
- Detection of the features approximately parallel to the sea surface by a summation of the values inside a moving sinusoidal mask: Reflections from the water mass boundaries might be too weak to appear in each beam, although the sinusoidal shape visible on the beam vs. time plot can be revealed. Those features will be then characterized by the higher values of samples in total along the line parallel to the sea surface, within some range of the possible fluctuations. As described in the visualizations above, this refers to the sinusoidal shape of the reflections; thus, moving sinusoidal masks are created to count the total values within it. The parameters of the sinusoidal mask boundaries and its width are dependent on the depth (sample number) and beam width for each summation. For each image, a series of sums is then created.
- Detection of peak sums: The peak in the series of calculated sums indicates the values higher than the surrounding background, creating a close-to-sinusoidal shape through all the beams.
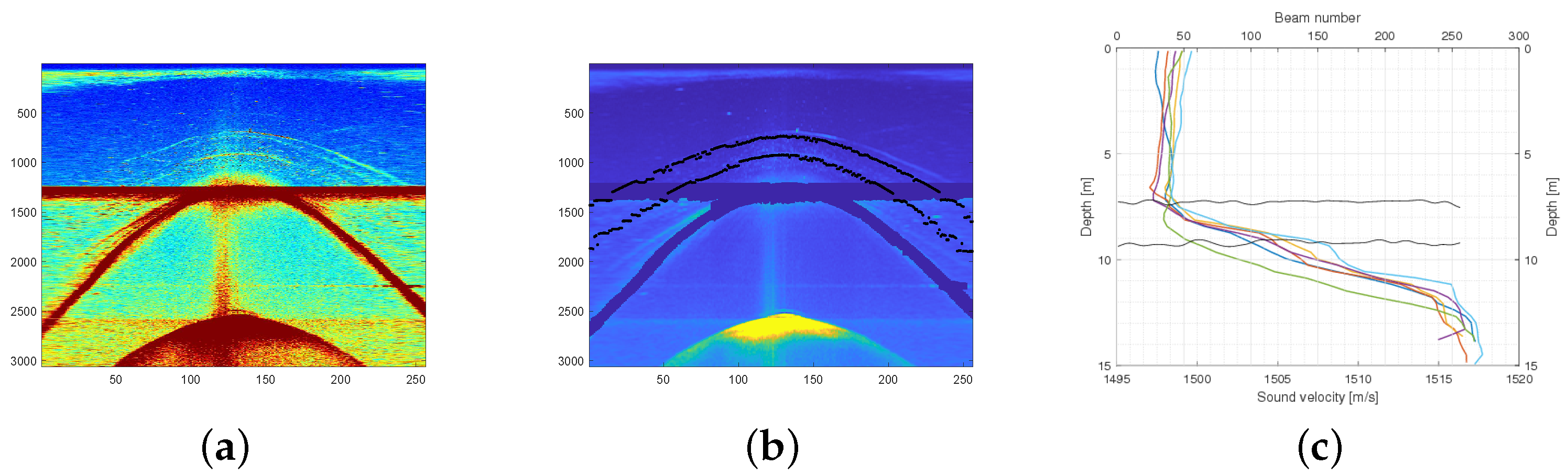
- Detection of the strongest echos within each beam inside the moving masks chosen in the previous step: This results in the water mass boundaries being indicated as a series of points, similar to the seabed indication, although more than one is allowed for each ping.

4. Results
5. Discussion
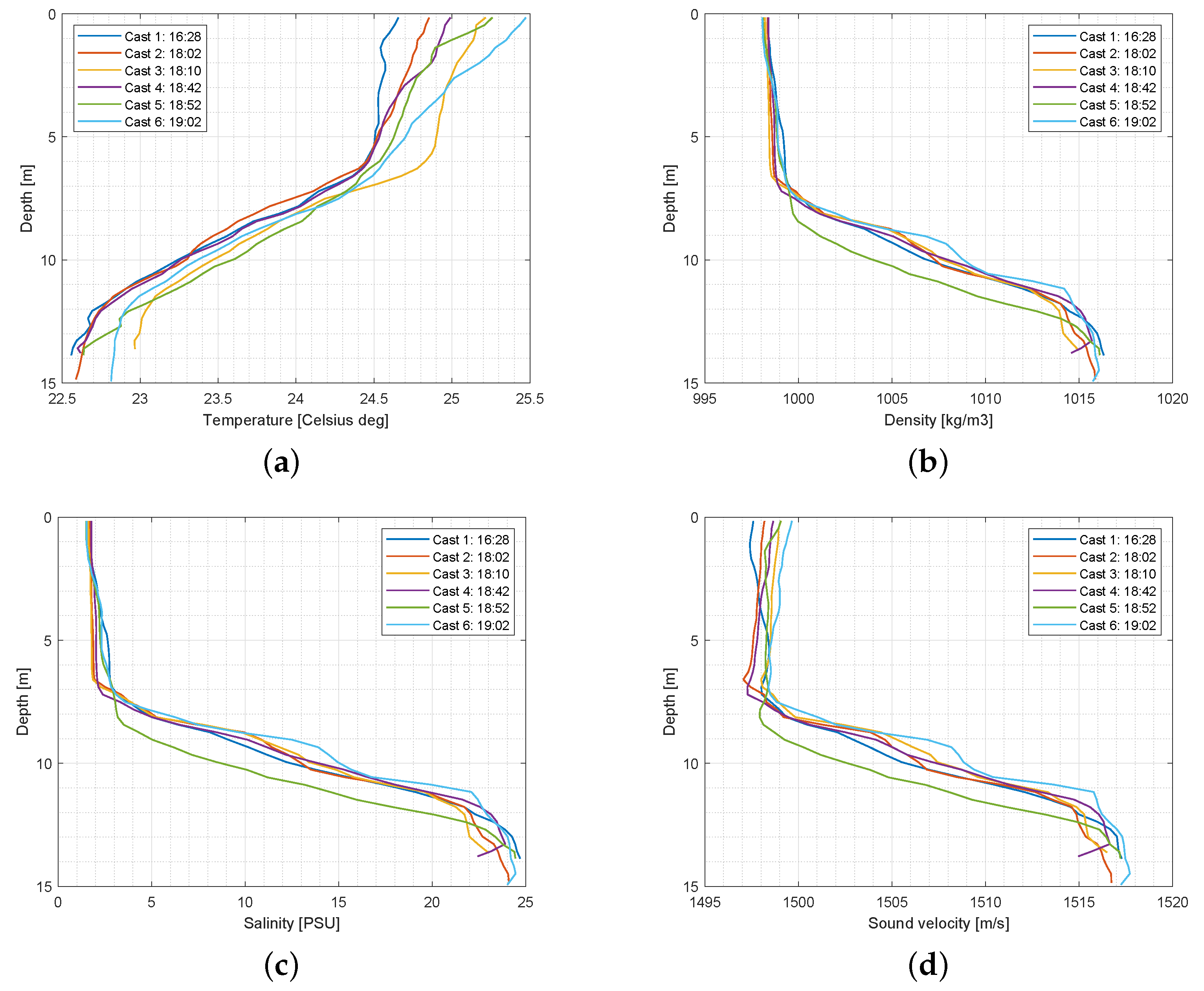
- It is possible to detect the depth of the rapid change of water properties at a particular moment of time, which can be used to update a currently used sound speed profile.
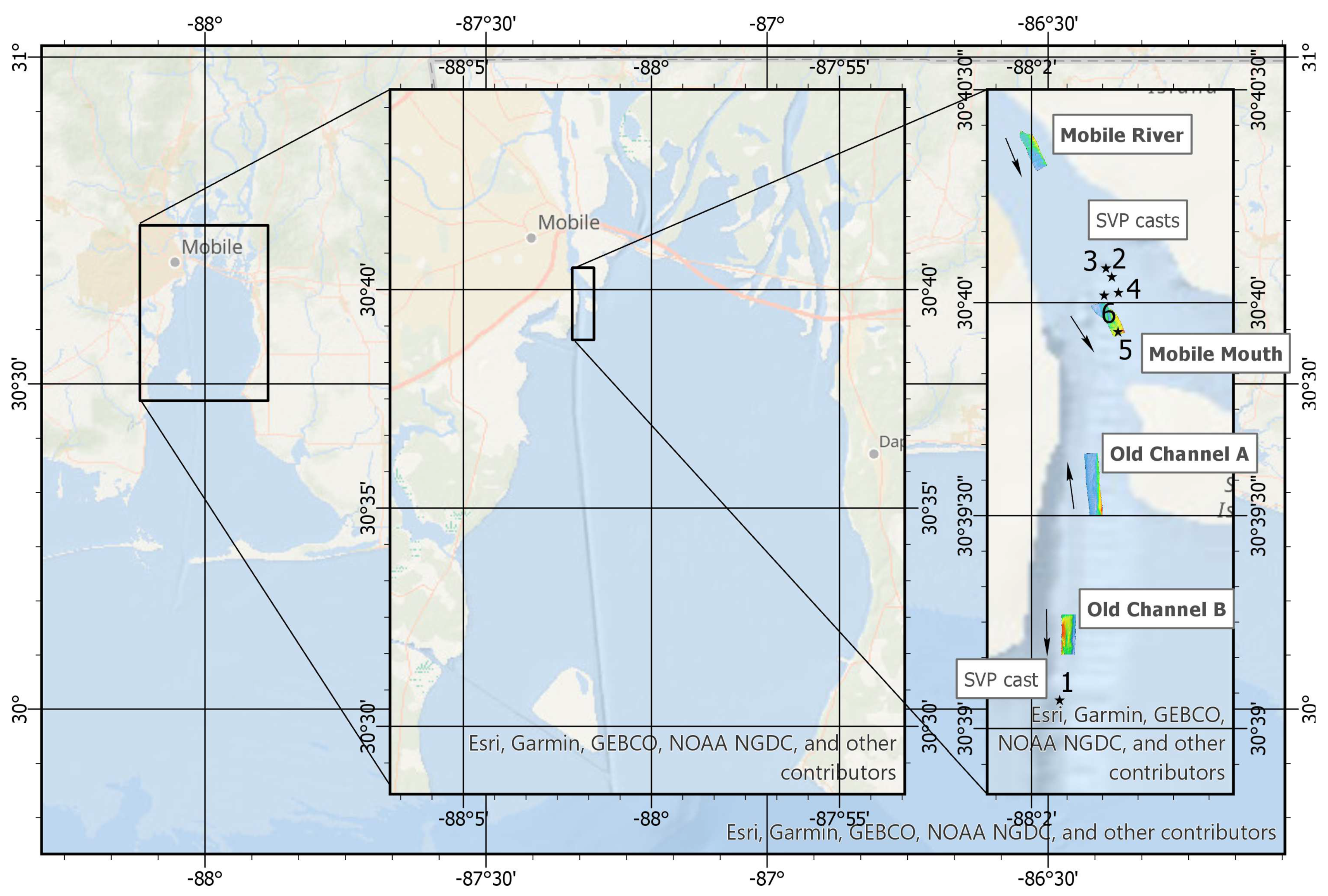
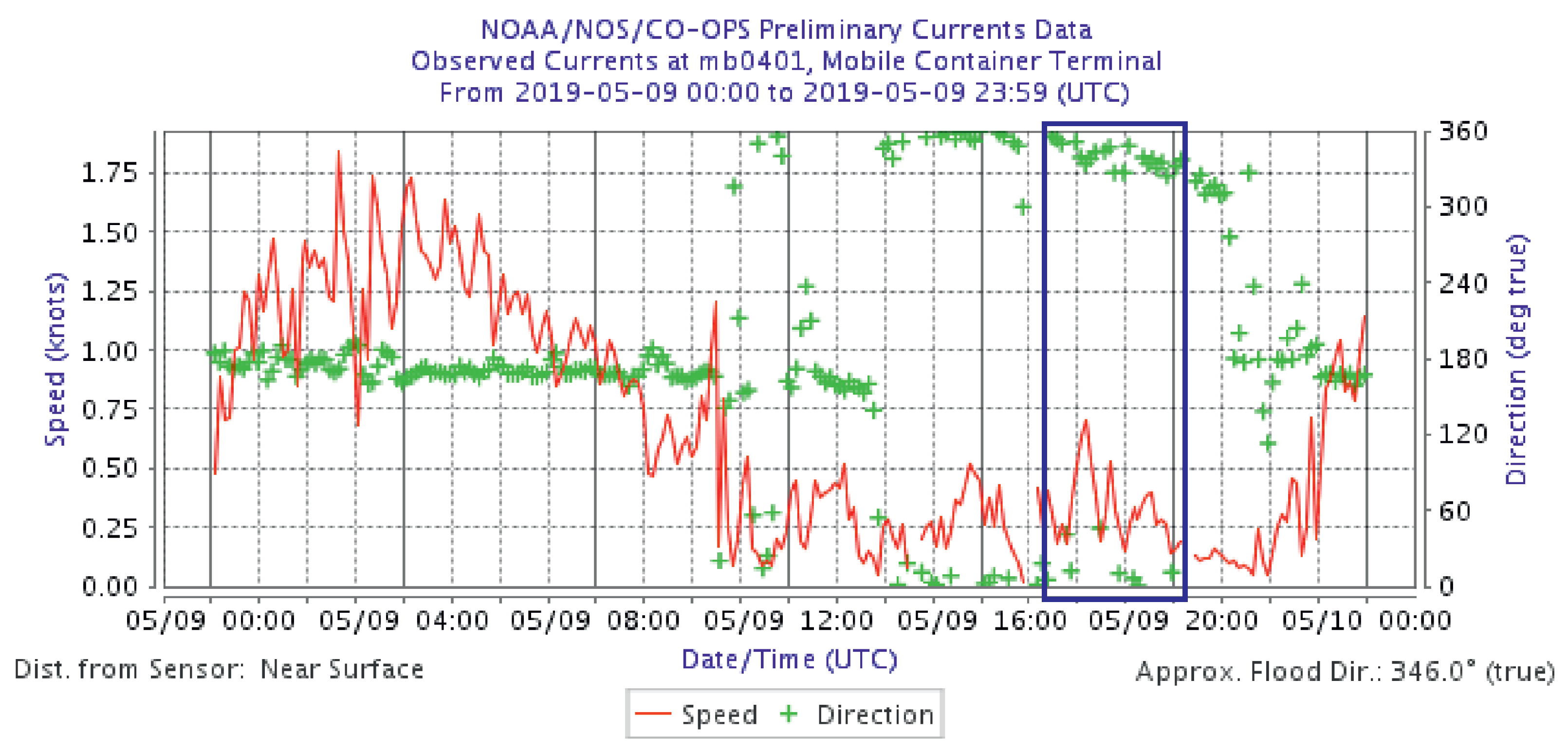
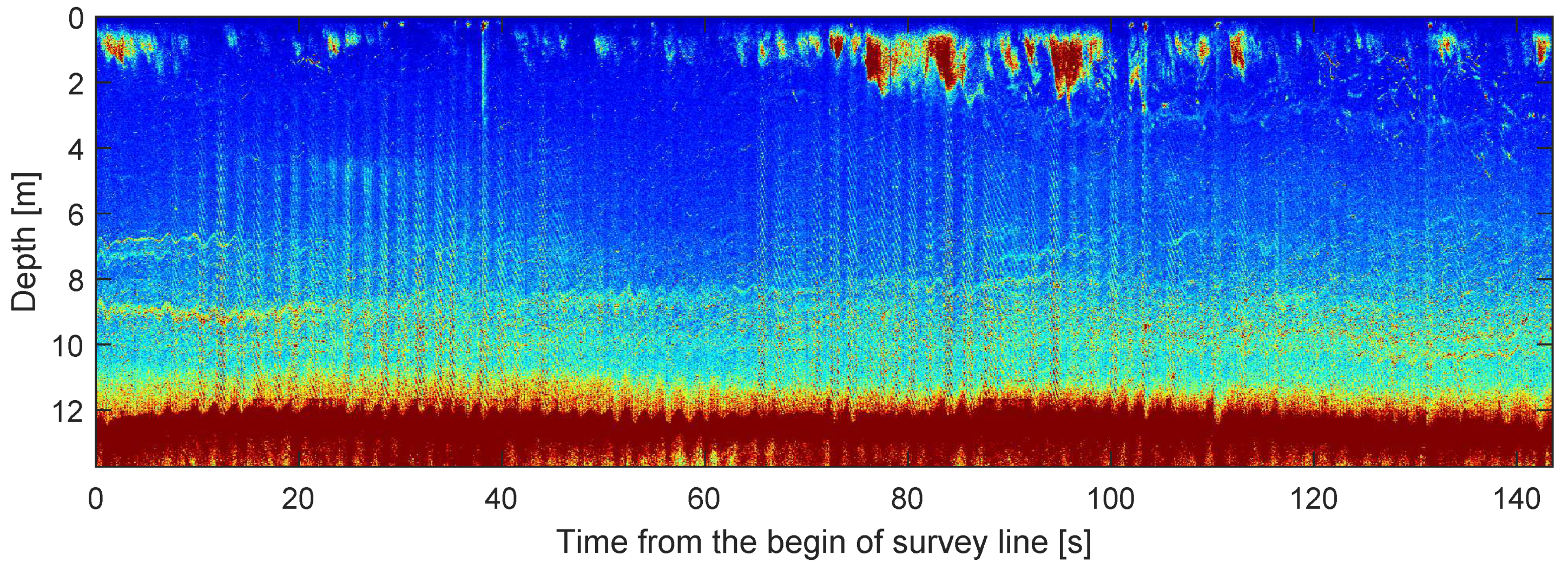
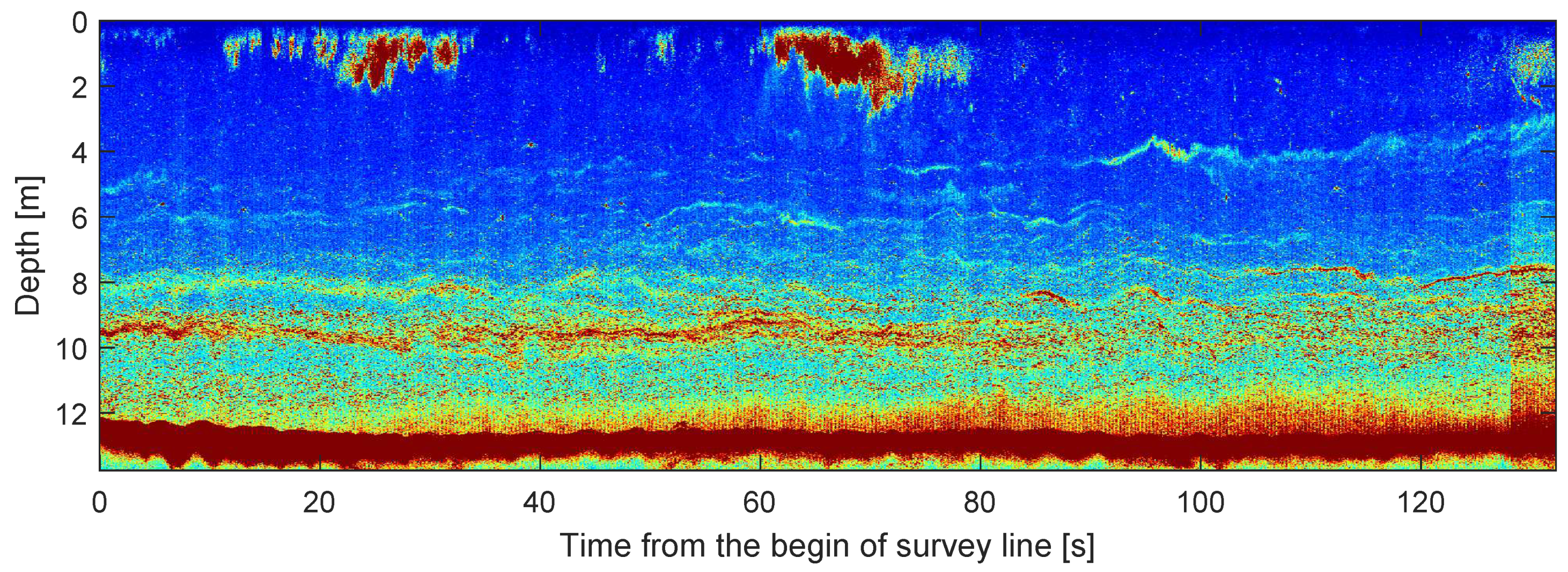
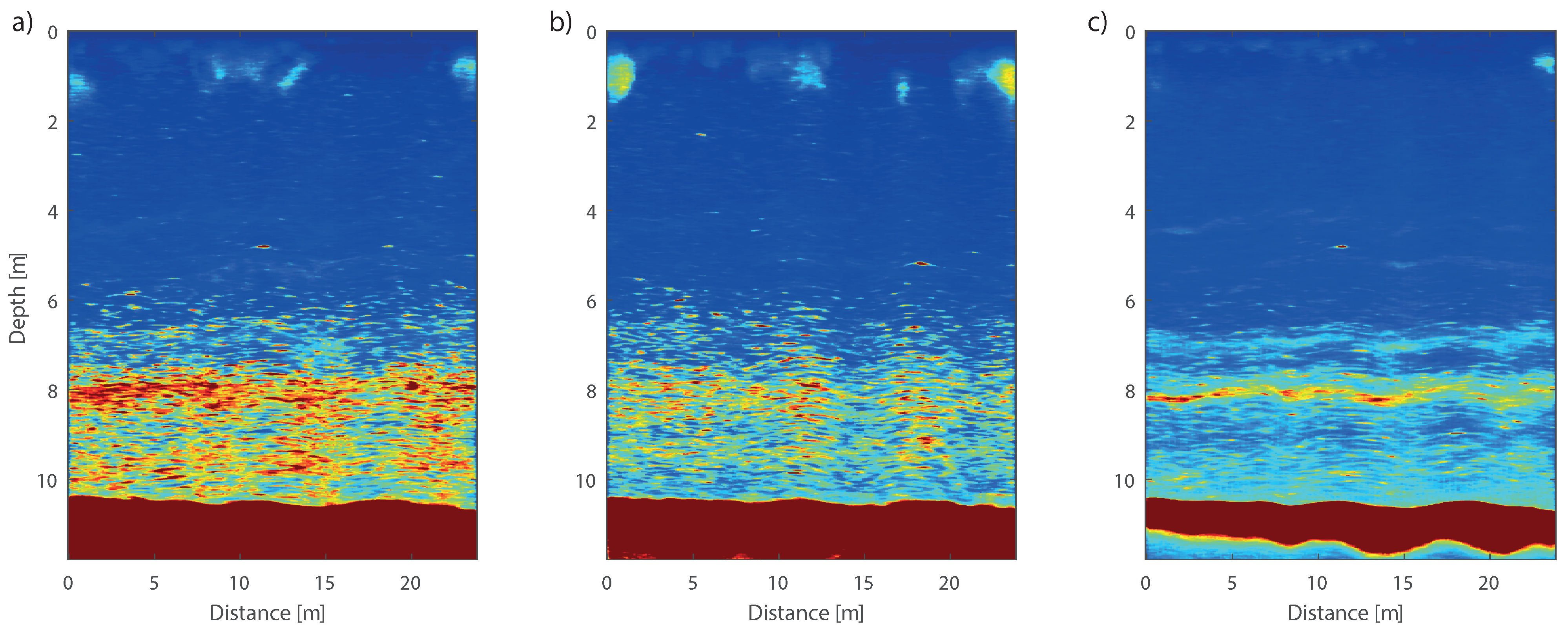
- The cross-sections are generated based on images presenting the acoustic responses of the seabed and water column, relative to the transducer. To determine the existence and the exact properties of internal waves, the vessel attitude, speed, and survey line shape must be taken into account. This is clearly visible on the records from Old Channel B and Old Channel A. Those lines both ran along the dredged shipping channel, but the first one (B) was recorded while running against the current of an incoming tide, while the second (A) ran with it. The period of the apparent sinusoidal-like shape visible in the cross-sections differs in these images, which may be caused by the sampling parameters of a moving vessel.
- Similar observations about the depth of the reflections from the strongest water mass boundaries can be made based on TruePix™ data, which are easy to process and require much less storage space.
- It was noticed that useful water column data are observed beyond the minimum slant range radius, which stands in contrast to the common routine of working only with water column data within the radius of the minimum slant range (e.g., [42]), recognizable by the sidelobes effect.
- Similar to the along-track cross-sections, the results are based here on the image data. To obtain the exact depths of the reflections, vessel attitude must be taken into account.
- The proposed method takes into account the whole swath of all MBES beams. This results in providing across-track cross-sections of the water column structure, showing the major boundaries between the various water masses and their differing properties.
- The proposed method allows the use of the detected boundary depth for each beam separately, increasing the overall accuracy of the determined depth.
- It has been observed and presented in the examples that the number of detected boundaries may vary between images. Some of the reflections were overall too weak to be picked up from the background, with some noise left after de-noising routines.
- The detected boundaries between water masses of varying properties can be compared with the sound speed profiles collected at two locations in the survey area. The ranges of detected boundary depths correspond with the indications of sound speed profiles, although exact values differ, and they refer to the particular time that input MBES data were collected. This reflects the movement of the boundaries caused by the mechanisms described in the introductory sections.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Medwin, H. Sounds in the Sea: From Ocean Acoustics to Acoustical Oceanography; Cambridge University Press: Campbridge, UK, 2005. [Google Scholar]
- Hamilton, T.; Beaudoin, J. Modeling the Effect of Oceanic Internal Waves on the Accuracy of Multibeam Echosounders. Int. Hydrogr. Rev. 2010, 4, 55–65. [Google Scholar]
- Helfrich, K.R.; Melville, W.K. Long nonlinear internal waves. Annu. Rev. Fluid Mech. 2006, 38, 395–425. [Google Scholar] [CrossRef]
- Santos-Ferreira, A.M.; Da Silva, J.C.B.; Magalhaes, J.M. SAR Mode Altimetry Observations of Internal Solitary Waves in the Tropical Ocean Part 1: Case Studies. Remote Sens 2018, 10, 644. [Google Scholar] [CrossRef] [Green Version]
- Liang, J.; Li, X.-M.; Sha, J.; Jia, T.; Ren, Y. The lifecycle of nonlinear internal waves in the northwestern South China Sea. J. Phys. Ocean. 2019, 49, 2133–2145. [Google Scholar] [CrossRef]
- Gao, Q.; Dong, D.; Yang, X.; Husi, L.; Shang, H. Himawari-8 Geostationary Satellite Observation of the Internal Solitary Waves in The South China Sea. Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2018, XLII, 7–10. [Google Scholar] [CrossRef] [Green Version]
- LeBlond, P.H.; Mysak, L.A. Waves in the Ocean; Elsevier: Amsterdam, The Netherlands, 1978. [Google Scholar]
- Apel, J.R. A New Analytical Model for Internal Solitons in the Ocean. J. Phys. Oceanogr. 2003, 33, 2247–2269. [Google Scholar] [CrossRef]
- Badiey, M.; Mu, Y.; Lynch, J.F.; Tang, X.; Apel, J.R.; Wolf, S. Azimuthal and temporal dependence of sound propagation due to shallow water internal waves. IEEE J. Ocean. Eng. 2002, 27, 117–129. [Google Scholar] [CrossRef]
- Li, L.; Pawlowicz, R.; Wang, C. Seasonal variability and generation mechanisms of nonlinear internal waves in the Strait of Georgia. J. Geophys. Res. Ocean. 2018, 123, 5706–5726. [Google Scholar] [CrossRef]
- Wang, C.; Wang, X.; Da Silva, J.C.B. Studies of Internal Waves in the Strait of Georgia Based on Remote Sensing Images. Remote Sens. 2019, 11, 96. [Google Scholar] [CrossRef] [Green Version]
- Magalhaes, J.M.; Da Silva, J.C.B. Internal Solitary Waves in the Andaman Sea: New Insights from SAR Imagery. Remote Sens. 2018, 10, 861. [Google Scholar] [CrossRef] [Green Version]
- Lamb, K.G. Internal Wave Breaking and Dissipation Mechanisms on the Continental Slope/Shelf. Annu. Rev. Fluid Mech. 2014, 46, 231–254. [Google Scholar] [CrossRef]
- Sutherland, B. Internal Gravity Waves; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar] [CrossRef]
- Klusek, Z. Conditions for Sound Propagation in the Southern Baltic. Ph.D. Thesis, Polish Academy of Science, Oceanology Institute, Warsaw, Poland, 1999; pp. 30–31. [Google Scholar]
- Shengxuan, L.; Xiuyun, C. The Effect of Oceanic Internal Waves on Multibeam Echosounding. Hydrogr. Surv. Charting 2012, 32, 27–29. [Google Scholar]
- Hughes Clarke, J.E. Coherent refraction “noise” in multibeam data due to oceanographic turbulence. In Proceedings of the US Hydrographic Conference, Galveston, TX, USA, 25 July 2017. 18p. [Google Scholar]
- Hughes Clarke, J.E. The Impact of Acoustic Imaging Geometry on the Fidelity of Seabed Bathymetric Models. Geosciences 2018, 8, 109. [Google Scholar] [CrossRef] [Green Version]
- Vilming, S. The Development of the Multibeam Echosounder: A Historical Account. J. Acoust. Soc. Am. 1998, 103, 5. [Google Scholar] [CrossRef]
- Lurton, X. An Introduction to Underwater Acoustics; Springer: Berlin/Heidelberg, Germany, 2002. [Google Scholar]
- Fundamentals of Naval Weapons Systems, Weapons and Systems Engineering Deptartment, US Naval Academy. Available online: https://fas.org/man/dod-101/navy/docs/fun/index.html (accessed on 24 February 2020).
- Urick, R.J. Principles of Underwater Sound; McGraw-Hill: New York, NY, USA, 1983. [Google Scholar]
- Blomberg, A.E.A.; Weber, T.C.; Austeng, A. Improved Visualization of Hydroacoustic Plumes Using the Split-Beam Aperture Coherence. Sensors 2018, 18, 7. [Google Scholar] [CrossRef] [Green Version]
- Colbo, K.; Ross, T.; Brown, C.; Weber, T.C. A review of oceanographic applications of water column data from multibeam echosounders. Estuarine Coast. Shelf Sci. 2014, 145, 41–56. [Google Scholar] [CrossRef]
- Caruthers, J.W. Fundamentals of Marine Acoustics; Elsevier: Amsterdam, The Netherlands, 1977; p. 64. [Google Scholar]
- Hughes Clarke, J.E. Applications of multibeam water column imaging for hydrographic survey. Hydrogr. J. 2006, 120, 3. [Google Scholar]
- Noble, M.A.; Schroeder, W.W.; Wiseman, W.J., Jr.; Ryan, H.F.; Gelfenbaum, G. Subtidal circulation patterns in a shallow, highly stratified estuary: Mobile Bay, Alabama. J. Geophys. Res. 1996, 101, 689–703. [Google Scholar] [CrossRef]
- Schroeder, W.W.; Lysinger, W.R. Hydrography and Circulation of Mobile Bay. In Symposium on the Natural Resources of the Mobile Bay Estuary; Loyacano, H.A., Smith, J.P., Eds.; U.S. Army Corps of Engineers: Washington, DC, USA, 1979; pp. 75–94. [Google Scholar]
- Wiseman, W.J., Jr.; Schroeder, W.W.; Dinnel, S.P. Shelf-Estuarine Water Exchanges between the Gulf of Mexico and Mobile Bay, Alabama. Am. Fish. Soc. Symp. 1988, 3, 1–8. [Google Scholar]
- Drymon, J.M.; Ajemian, M.J.; Powers, S.P. Distribution and dynamic habitat use of young bull sharks Carcharhinus leucas in a highly stratified northern Gulf of Mexico estuary. PLoS ONE 2014, 9, e97124. [Google Scholar] [CrossRef]
- Ryan, J.J.; Goodell, H.G. Marine Geology and Estuarine History of Mobile Bay, Alabama Part 1. Contemporary Sediments. Environ. Framew. Coast. Plain Estuaries 1972, 18. [Google Scholar] [CrossRef]
- Cambazoglu, M.K.; Soto, I.M.; Howden, S.D.; Dzwonkowski, B.; Fitzpatrick, P.J.; Arnone, R.A.; Jacobs, G.A.; Lau, Y.H. Inflow of shelf waters into the Mississippi Sound and Mobile Bay estuaries in October 2015. J. Appl. Rem. Sens. 2017, 11, 032410. [Google Scholar] [CrossRef] [Green Version]
- NOAA Tides & Currents, Mobile Container Terminal (mb0401). Available online: https://tidesandcurrents.noaa.gov (accessed on 2 March 2020).
- SONIC. 2026/2024/2022 Broadband Multibeam Echosounders, Operation Manual V6.3, Revision 003, 28 February 2019, Part No. 96000001. Documentation assocciated with the data, obtained from the R2Sonic company. unpublished.
- Gaida, T.C.; Tengku Ali, T.A.; Snellen, M.; Amiri-Simkooei, A.; Van Dijk, T.A.G.P.; Simons, D.G. A Multispectral Bayesian Classification Method for Increased Acoustic Discrimination of Seabed Sediments Using Multi-Frequency Multibeam Backscatter Data. Geosciences 2018, 8, 455. [Google Scholar] [CrossRef] [Green Version]
- Brown, C.J.; Beaudoin, J.; Brissette, M.; Gazzola, V. Multispectral Multibeam Echo Sounder Backscatter as a Tool for Improved Seafloor Characterization. Geosciences 2019, 9, 126. [Google Scholar] [CrossRef] [Green Version]
- QPS. How-to Methods Used to Acquire Sonar Imagery. Available online: https://confluence.qps.nl/qinsy/8.0/en/how-to-methods-used-to-acquire-sonar-imagery-52101176.html (accessed on 7 December 2019).
- R2Sonic. 2019 MS Challenge Data and File Format Info, unpublished report by R2sonic. Documentation assocciated with the data, obtained from the R2Sonic company. unpublished.
- Beaudoin, J.; Clarke, J.H.; Bartlett, J. Application of Surface Sound Speed Measurements in Post-processing for Multi-Sector Multibeam Echosounders. IHR 2004, 5, 3. [Google Scholar]
- Cheynet, E. Pcolor in Polar Coordinates. MATLAB Central File Exchange. 2020. Available online: https://www.mathworks.com/%20matlabcentral/fileexchange/%2049040-pcolor-in-polar-coordinates.html (accessed on 26 February 2020).
- Cordero Ros, J.M. Improved Sound Speed Control through Remotely Detecting Strong Changes in Thermocline. Master’s Theses, University of New Hampshire, Durham, NH, USA, 2018. Available online: https://scholars.unh.edu/thesis/1245 (accessed on 17 March 2020).
- Church, I.; Lauren, Q.; Williamson, M. Multibeam Water Column Data Processing Techniques to Facilitate Scientific Bio-Acoustic Interpretation. Available online: http://www.omg.unb.ca/wordpress/papers/Church_USHydro_2017.pdf (accessed on 19 March 2020).
- Stateczny, A.; Praczyk, T. Sztuczne Sieci Neuronowe w Rozpoznawaniu Obiektów Morskich [In Polish]; Gdanskie Towarzystwo Naukowe: Gdansk, Poland, 2002; ISBN 83-87359-68-2. [Google Scholar]
- Hsu, M.K.; Liu, A.K.; Liu, C. A study of internal waves in the China Seas and Yellow Sea using SAR. Cont. Shelf Res. 2000, 20, 389–410. [Google Scholar] [CrossRef]
- Kozlov, I.; Romanenkov, D.; Zimin, A.; Chapron, B. SAR observing large-scale nonlinear internal waves in the White Sea. Remote Sens. Environ. 2014, 147, 99–107. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Clemente-Colon, P.; Friedman, K.S. Estimating oceanic mixed-layer depth from internal wave evolution observed from Radarsat-1 SAR. Johns Hopkins APL Tech. Dig. 2000, 21, 130–135. [Google Scholar]
- Tang, Q.; Tong, V.; Hobbs, R.W.; Morales Maqueda, M.A. Detecting changes at the leading edge of an interface between oceanic water layers. Nat. Commun. 2019, 10, 4674. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Buffett, G.G.; Krahmann, G.; Klaeschen, D.; Schroeder, K.; Sallares, V.; Papenberg, C.; Ranero, C.R.; Zitellini, N. Seismic oceanography in the Tyrrhenian Sea: Thermohaline staircases, eddies, and internal waves. J. Geophys. Res. Ocean. 2017, 122, 8503–8523. [Google Scholar] [CrossRef] [Green Version]
- Holbrook, W.S.; Fer, I. Ocean internal wave spectra inferred from seismic reflection transects. Geophys. Res. Lett. 2005, 32. [Google Scholar] [CrossRef] [Green Version]
- Apel, J.R. Oceanic Internal Waves and Solitons, An Atlas of Oceanic Internal Solitary Waves; Global Ocean Associates for Office of Naval Research, Global Ocean Associates: Silver Spring, MD, USA, 2002; pp. 1–40. [Google Scholar]
- Gerkema, T.; Zimmerman, J.T.F. An Introduction to Internal Waves. Lecture Notes, Royal NIOZ, Texel 207, 2008. Available online: https://www.vliz.be/ (accessed on 21 February 2020).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Feature | Specification |
|---|---|
| Frequency | 170 kHz to 450 kHz |
| Beamwidth—Across Track (at nadir) | 0.5° @ 400 kHz/1.0° @ 200 kHz |
| Beamwidth—Along Track (at nadir) | 0.9° @ 450 kHz/2.0° @ 200 kHz |
| Number of Beams | 256 |
| Swath Sector | 10° to 160° (user selectable) |
| Maximum Slant Range | 1200 m |
| Pulse Length | 15–1115 s |
| Projector | 273 mm × 108 mm × 86 mm/3.3 kg |
| File Format | Number of Files | Storage Size | Frequencies | Absorption Coefficients |
|---|---|---|---|---|
| 1. Old Channel B—09 May 2019, 16:21:06.7–16:23:29.6 UTC | ||||
| GWC | 11 | 4.18 GB | 400, 425, 450 kHz | 73, 78, 83 dB/km |
| R2S | 11 | 8.35 GB | 400, 425, 450 kHz | 73, 78, 83 dB/km |
| TruePix | 11 | 81.8 MB | 400, 425, 450 kHz | 73, 78, 83 dB/km |
| 2. Old Channel A—09 May 2019, 17:07:14.7–17:09:26.7 UTC | ||||
| GWC | 11 | 4.03 GB | 400, 425, 450 kHz | 73, 78, 83 dB/km |
| R2S | 11 | 8.05 GB | 400, 425, 450 kHz | 73, 78, 83 dB/km |
| TruePix | 11 | 78.6 MB | 400, 425, 450 kHz | 73, 78, 83 dB/km |
| 3. Mobile River—09 May 2019, 18:18:58.8–18:21:11.8 UTC | ||||
| GWC | 11 | 4.26 GB | 200, 325, 450 kHz | 36, 59, 83 dB/km |
| R2S | 11 | 8.02 GB | 200, 325, 450 kHz | 36, 59, 83 dB/km |
| TruePix | 11 | 81.8 MB | 200, 325, 450 kHz | 36, 59, 83 dB/km |
| 4. Mobile Mouth—09 May 2019, 19:10:08.8–19:12:20.8 UTC | ||||
| GWC | 9 | 3.27 GB | 350, 400, 450 kHz | 63, 73, 83 dB/km |
| R2S | 11 | 7.97 GB | 350, 400, 450 kHz | 63, 73, 83 dB/km |
| TruePix | 11 | 78.8 MB | 350, 400, 450 kHz | 63, 73, 83 dB/km |
| Cast Number | Cast Time (UTC) | Latitude (Degrees) | Longitude (Degrees) |
|---|---|---|---|
| 1 | 16:28 | 30.6511054 | −88.0322334 |
| 2 | 18:02 | 30.6676937 | −88.0301914 |
| 3 | 18:10 | 30.6680336 | −88.0304203 |
| 4 | 18:42 | 30.6670786 | −88.0299307 |
| 5 | 18:52 | 30.6655411 | −88.0299461 |
| 6 | 19:02 | 30.6669704 | −88.0304899 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zwolak, K.; Marchel, Ł.; Bohan, A.; Sumiyoshi, M.; Roperez, J.; Grządziel, A.; Wigley, R.A.; Seeboruth, S. Automatic Identification of Internal Wave Characteristics Affecting Bathymetric Measurement Based on Multibeam Echosounder Water Column Data Analysis. Energies 2021, 14, 4774. https://doi.org/10.3390/en14164774
Zwolak K, Marchel Ł, Bohan A, Sumiyoshi M, Roperez J, Grządziel A, Wigley RA, Seeboruth S. Automatic Identification of Internal Wave Characteristics Affecting Bathymetric Measurement Based on Multibeam Echosounder Water Column Data Analysis. Energies. 2021; 14(16):4774. https://doi.org/10.3390/en14164774
Chicago/Turabian StyleZwolak, Karolina, Łukasz Marchel, Aileen Bohan, Masanao Sumiyoshi, Jaya Roperez, Artur Grządziel, Rochelle Ann Wigley, and Sattiabaruth Seeboruth. 2021. "Automatic Identification of Internal Wave Characteristics Affecting Bathymetric Measurement Based on Multibeam Echosounder Water Column Data Analysis" Energies 14, no. 16: 4774. https://doi.org/10.3390/en14164774
APA StyleZwolak, K., Marchel, Ł., Bohan, A., Sumiyoshi, M., Roperez, J., Grządziel, A., Wigley, R. A., & Seeboruth, S. (2021). Automatic Identification of Internal Wave Characteristics Affecting Bathymetric Measurement Based on Multibeam Echosounder Water Column Data Analysis. Energies, 14(16), 4774. https://doi.org/10.3390/en14164774